Curiosity Interview with Project Manager Jim Erickson – New Software Hastens Trek to Mount Sharp
Mount Sharp inside Gale Crater - is the primary destination of NASA’s Curiosity rover mission to Mars. Curiosity landed on the right side of the mountain as shown here, near the dune field colored dark blue. Mount Sharp dominates Gale Crater. It is 3.4 mile (5.5 km) high. Gale Crater is 154 km wide. This image was taken by the High Resolution Stereo Camera (HRSC) of ESA’s Mars Express orbiter. Credit: ESA/DLR/FU Berlin (G. Neukum)
As NASA’s 1 ton Curiosity Mars rover sets out on her epic trek to the ancient sedimentary layers at the foothills of mysterious Mount Sharp, Universe Today conducted an exclusive interview with the Curiosity Project Manager Jim Erickson, of NASA’s Jet Propulsion Laboratory (JPL) to get the latest scoop so to speak on the robots otherworldly adventures.
The science and engineering teams are diligently working right now to hasten the rovers roughly year long journey to the 3.4 mile (5.5 km) high Martian mountain – which is the mission’s chief destination and holds caches of minerals that are key to sparking and sustaining life.
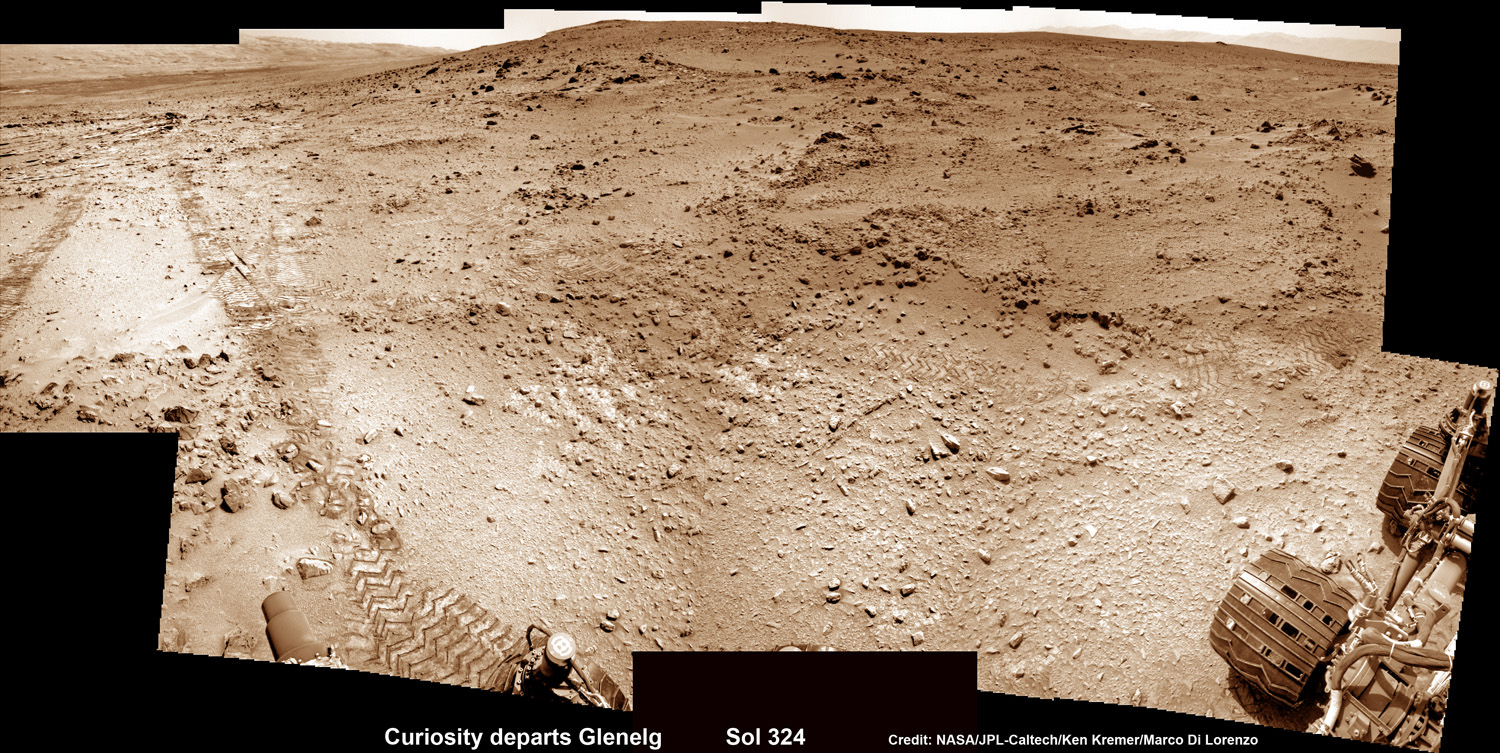
“We have departed Glenelg and the Shaler outcrop and started to Mount Sharp,” Erickson told me.
Overall the six wheeled rover just exceeded the 1 kilometer (0.62 mile) mark in roving across the Red Planet.
Mount Sharp lies about 5 miles (8 kilometers) distant – as the Martian crow flies.
This photomosic shows NASA’s Curiosity departing at last for Mount Sharp- her main science destination. Note the wheel tracks on the Red Planet’s surface. The navcam camera images were taken on July 4, 2013 (Sol 324). Credit: NASA/JPL-Caltech/Ken Kremer (kenkremer.com)/Marco Di Lorenzo
Curiosity will have to traverse across potentially treacherous dune fields on the long road ahead to the layered mountain.
“Things are going very well and we have a couple of drives under our belt,” said Erickson.
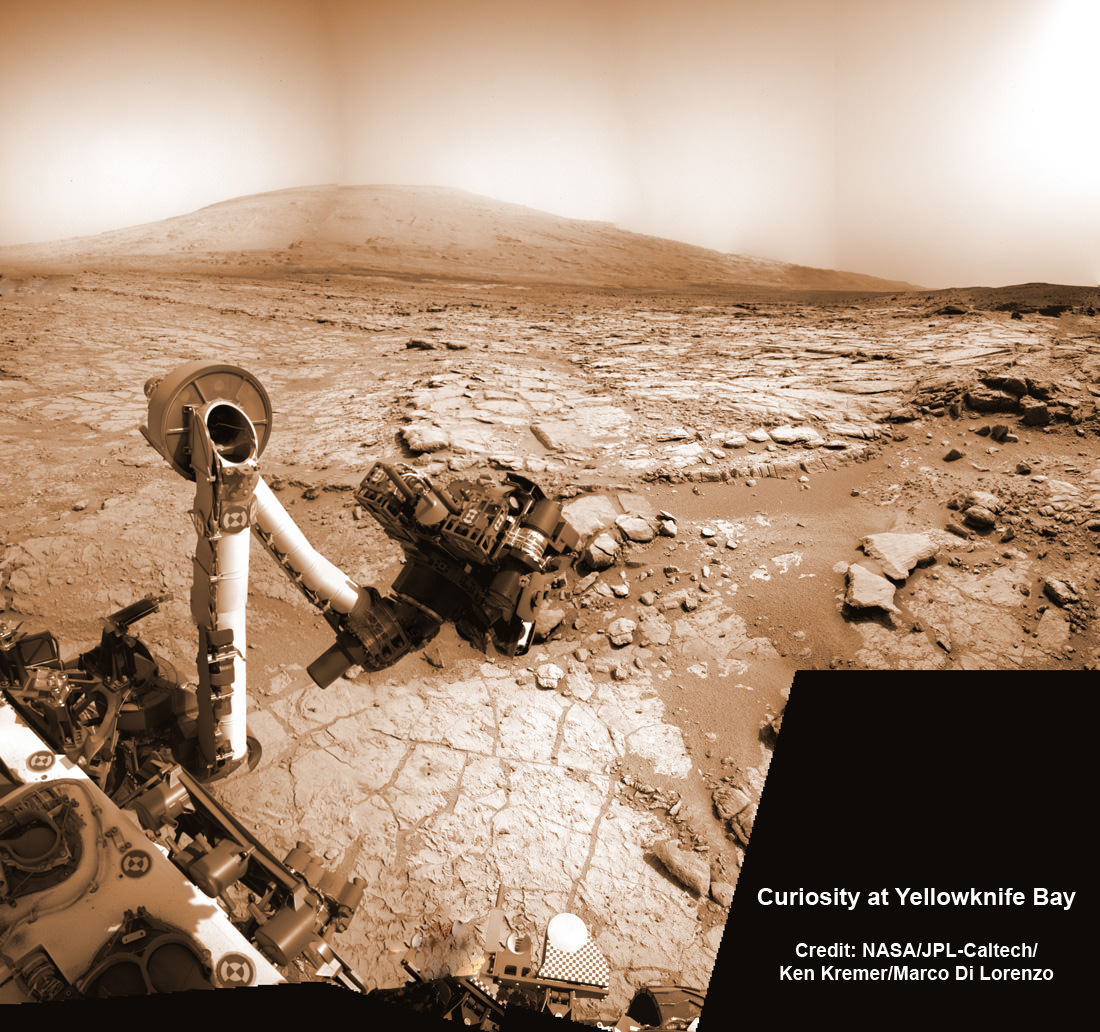
Curiosity just completed more than half a year’s worth of bountiful science at Glenelg and Yellowknife Bay where she discovered a habitable environment on the Red Planet with the chemical ingredients that could sustain Martian microbes- thereby already accomplishing the primary goal of NASA’s flagship mission to Mars.
Curiosity’s handlers are upgrading the rovers ‘brain’ with new driving software, making her smarter, more productive and capable than ever before, and also far more independent since her breathtaking touchdown inside Gale Crater nearly a year ago on Aug. 6, 2012.
“We continue to drive regularly. The next drive is planned tomorrow and will be executed the following day.”
As of today (Sol 336, July 17), Curiosity has driven six times since leaving Glenelg on July 4 (Sol 324), totaling more than 180 meters.
This map shows the route driven by NASA’s Mars rover Curiosity through Sol 333 of the rover’s mission on Mars (July 14, 2013). Numbering of the dots along the line indicate the sol number of each drive. North is up. The scale bar is 200 meters (656 feet). From Sol 331 to Sol 333, Curiosity had driven a straight line distance of about 45.05 feet (13.73 meters). The base image from the map is from the High Resolution Imaging Science Experiment Camera (HiRISE) in NASA’s Mars Reconnaissance Orbiter. Credit: NASA/JPL-Caltech/Univ. of Arizona
Scientists specifically targeted Curiosity to Gale Crater and Mount Sharp because it is loaded with deposits of clay minerals that form in neutral water and that could possibly support the origin and evolution of simple Martian life forms, past or present.
Erickson has worked in key positions on many NASA planetary science missions dating back to Viking. These include the Galileo mission to Jupiter, both MER rovers Spirit & Opportunity, as well as a stint with the Mars Reconnaissance Orbiter (MRO).
Here is Part 1 of my wide ranging conversation with Jim Erickson, Curiosity Project Manager of JPL. Part 2 will follow.
I asked Erickson to describe the new driving software called autonomous navigation, or autonav, and how it will help speed Curiosity on her way. Until now, engineers on Earth did most of the planning for her.
Jim Erickson: We have put some new software – called autonav, or autonomous navigation – on the vehicle right after the conjunction period back in March 2013. This will increase our ability to drive.
The reason we put it on-board is that we knew it would be helpful when we started the long drive to Mount Sharp. And we are itching to check that out. Over the next few weeks we will be doing various tests with the autonav.
Ken Kremer: How will autonav help Curiosity?
Jim Erickson: The rover will have the ability to understand how far it’s driving, whether its slipping or not, and to improve safety.
And then the next step will be in effect to allow the rover to drive on its own.
Ken: How often will Curiosity drive?
Jim Erickson: Somewhere like every other day or so. We plan a drive, see how it goes and whether it went well and then we move further to the next drive. We are implementing that as it stands while we do the checkouts of autonav.
We might have to stop driving for part of the autonav checkout to complete the testing.
Basically we are limited mainly by the amount of days that we have successful completion of the previous day’s drive. And whether we have the information come back down [to Earth] so that we can plan the next day’s drive.
In some circumstances Mars time can rotate so that we don’t get the data back in time, so therefore we won’t be driving that day.
Ken: Can you ever drive two days in a row?
Jim Erickson: Yes we can, if the timing is right. If we get the results of the day’s drive (n) in time before we have to plan the next day’s drive (n+1) – almost as if you’re on Mars time. Then that would work fine.
Also, when we get the autonav capability we can plan two days in row. One day of directed driving and the second day can be ‘OK here’s your target from wherever you end up, try and go to this spot’.
This will increase the productivity!
Ken: When will autonav be up and running?
Jim Erickson: Something like two to three weeks. We need to thoroughly look at all the tests and validate them first so that we’re all comfortable with autonav.
Ken: What’s the Martian terrain on the floor of Gale crater like right now and for the next few miles?
Jim Erickson: It’s a mix of sand and different flagstone areas. As we get into it we’ll need to be able to drive comfortably on both. There aren’t too many large rocks that would be a problem right now. There is some shelf area that we’ll be going around.
Right now the area we’re in is actually a good thing to give us practice identifying obstacles and getting around them. This will help us later on when we see obstacles and want to be driving quicker.
Ken: What’s the overall plan now, a focus on driving or stopping and investigating?
Jim Erickson: – It’s not the intent to be stopping. This will be a good couple of weeks driving.
In Part 2 of my conversation with Jim Erickson we’ll discuss more about the rover’s traverse across alien territory that’s simultaneously a science gold mine and a potential death trap, as well as drilling and sampling activities, Comet ISON observations and upcoming science objectives.
Previous experience with rovers on Mars will be enormously helpful in studying how the rover interacts with dune fields. Autonav was first employed on the MER rovers.
The rover drivers and science team gained lots of experience and know how while driving both Spirit & Opportunity through numerous gigantic fields of dunes of highly varying composition and complexity.
Stay tuned for more from Mars.
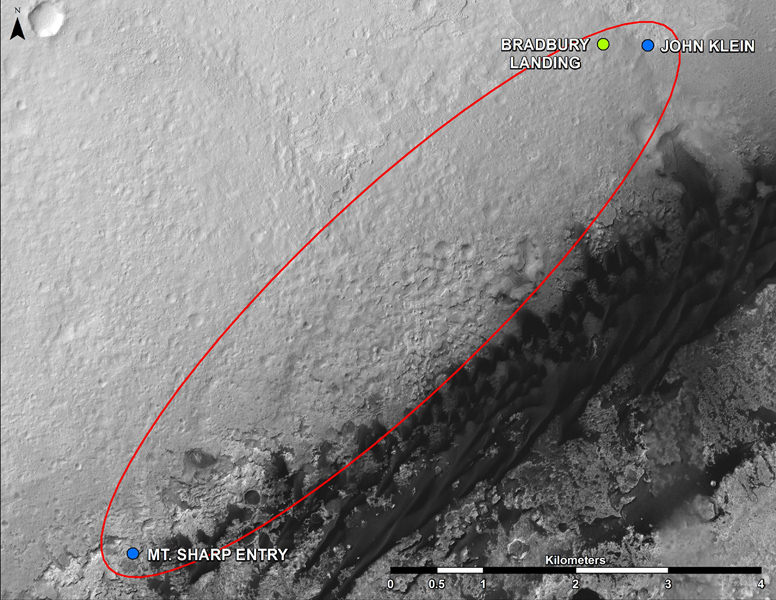
This map shows where NASA’s Mars rover Curiosity landed in August 2012 at “Bradbury Landing”; the area where the rover worked from November 2012 through May 2013 at and near the “John Klein” target rock in the “Glenelg” area; and the mission’s next major destination, the entry point to the base of Mount Sharp. Credit: NASA/JPL-Caltech/Univ. of Arizona
Recent Posts
NASA is Developing Solutions for Lunar Housekeeping’s Biggest Problem: Dust!
Through the Artemis Program, NASA will send the first astronauts to the Moon since the…
Where’s the Most Promising Place to Find Martian Life?
New research suggests that our best hopes for finding existing life on Mars isn’t on…

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Can Entangled Particles Communicate Faster than Light?
Entanglement is perhaps one of the most confusing aspects of quantum mechanics. On its surface,…
IceCube Just Spent 10 Years Searching for Dark Matter
Neutrinos are tricky little blighters that are hard to observe. The IceCube Neutrino Observatory in…
Star Devouring Black Hole Spotted by Astronomers
A team of astronomers have detected a surprisingly fast and bright burst of energy from…
What Makes Brown Dwarfs So Weird?
Meet the brown dwarf: bigger than a planet, and smaller than a star. A category…