See NASA’s Curiosity Rover Simultaneously from Orbit and Red Planet’s Surface Climbing Mount Sharp
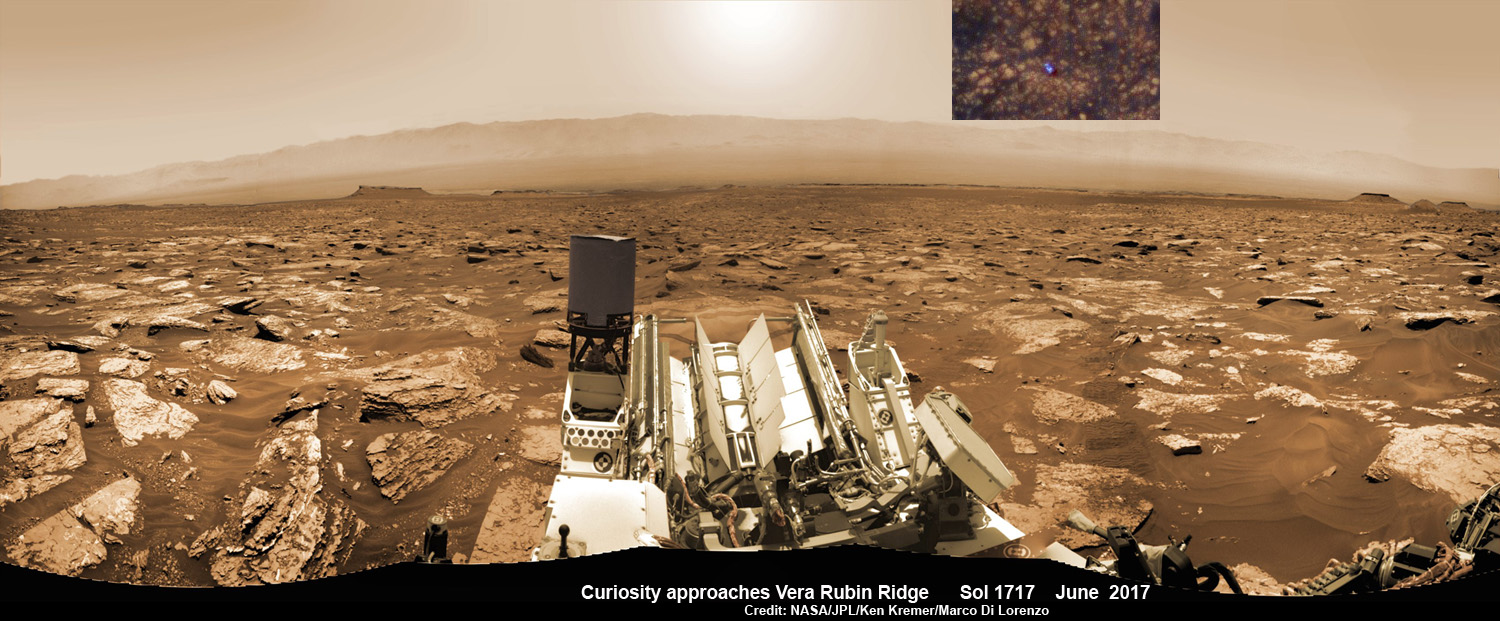
NASA’s Curiosity rover as seen simultaneously on Mars surface and from orbit on Sol 1717, June 5, 2017. The robot snapped this self portrait mosaic view while approaching Vera Rubin Ridge at the base of Mount Sharp inside Gale Crater - backdropped by distant crater rim. This navcam camera mosaic was stitched from raw images and colorized. Inset shows overhead orbital view of Curiosity (blue feature) amid rocky mountainside terrain taken the same day by NASA’s Mars Reconnaissance Orbiter. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
You can catch a glimpse of what its like to see NASA’s Curiosity Mars rover simultaneously high overhead from orbit and trundling down low across the Red Planet’s rocky surface as she climbs the breathtaking terrain of Mount Sharp – as seen in new images from NASA we have stitched together into a mosaic view showing the perspective views; see above.
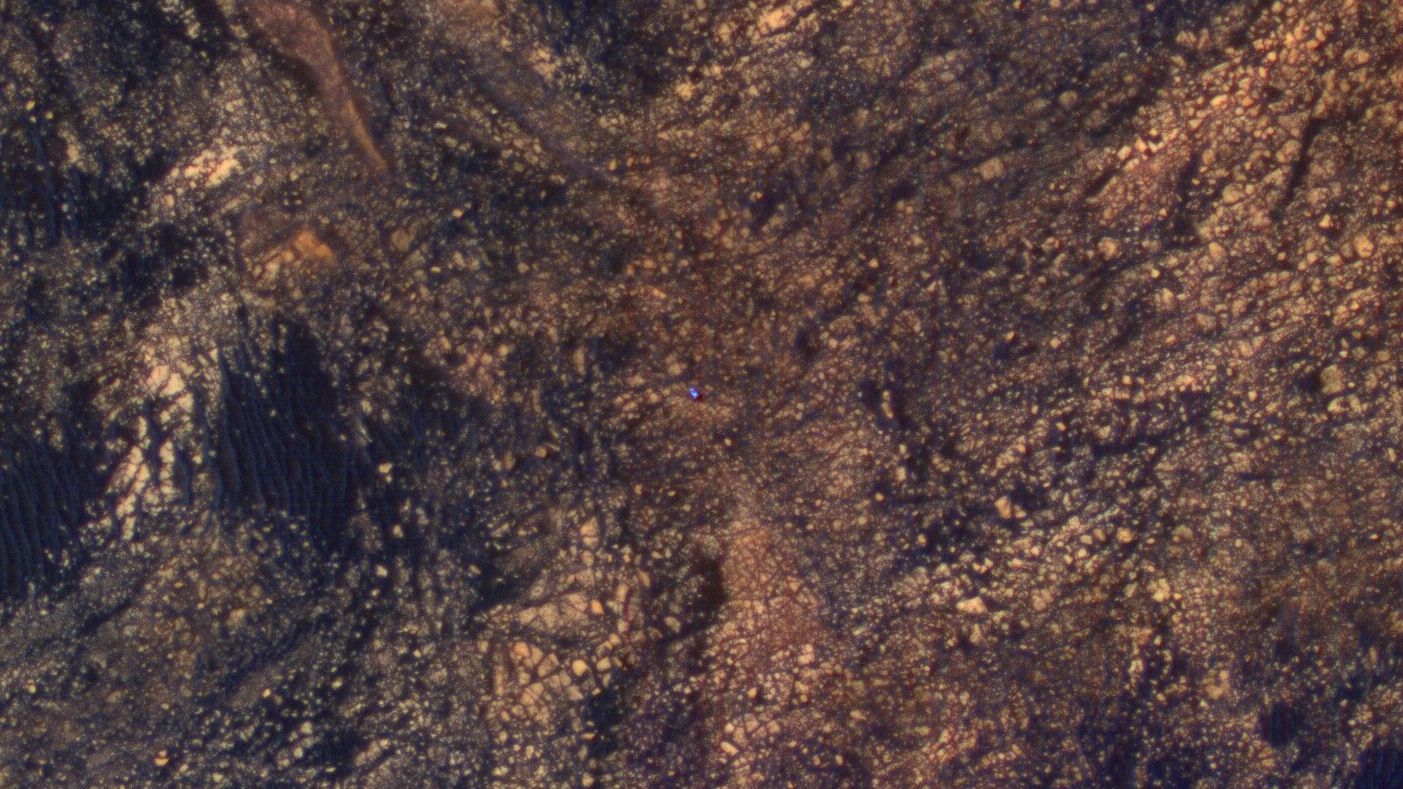
Earlier this month on June 5, researchers commanded NASA’s Mars Reconnaissance Orbiter (MRO) to image the car sized Curiosity rover from Mars orbit using the spacecrafts onboard High Resolution Imaging Science Experiment (HiRISE) telescopic camera during Sol 1717 of her Martian expedition – see below.
HiRISE is the most powerful telescope ever sent to Mars.
And as she does nearly every Sol, or Martian day, Curiosity snapped a batch of new images captured from Mars surface using her navigation camera called navcam – likewise on Sol 1717.
Since NASA just released the high resolution MRO images of Curiosity from orbit, we assembled together the navcam camera raw images taken simultaneously on June 5 (Sol 1717), in order to show the actual vista seen by the six wheeled robot from a surface perspective on the same day.
The lead navcam photo mosaic shows a partial rover selfie backdropped by the distant rim of Gale Crater – and was stitched together by the imaging team of Ken Kremer and Marco Di Lorenzo.
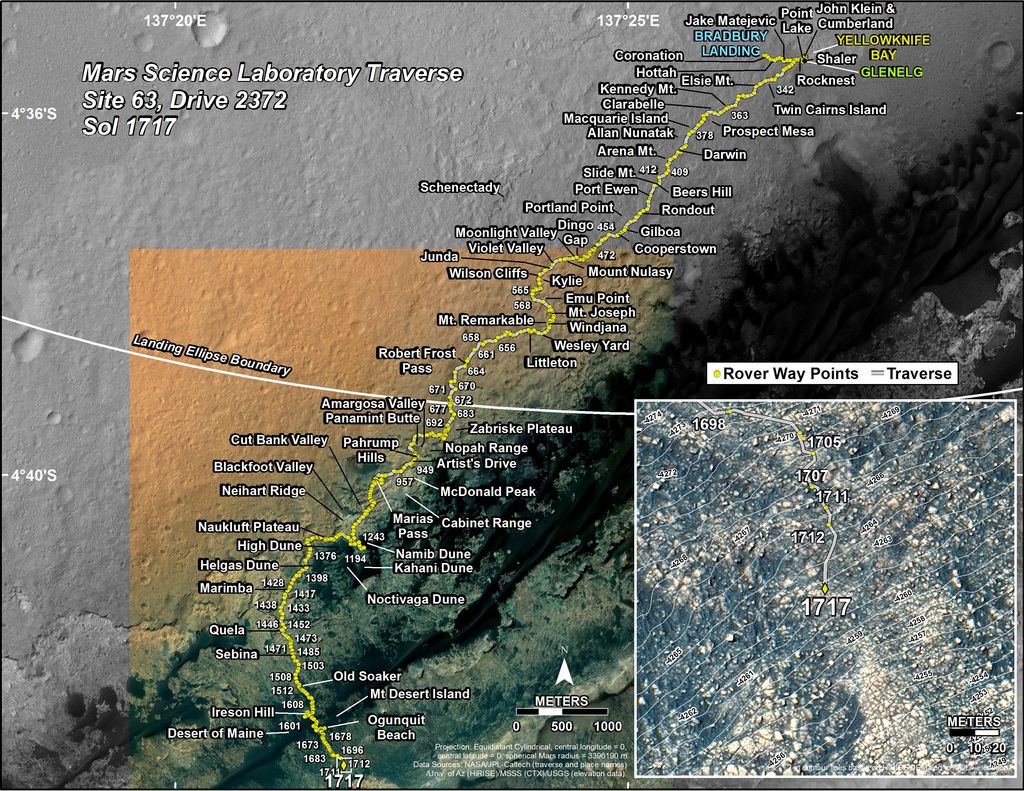
Right now NASA’s Curiosity Mars Science Laboratory (MSL) rover is approaching her next science destination named “Vera Rubin Ridge” while climbing up the lower reaches of Mount Sharp, the humongous mountain that dominates the rover’s landing site inside Gale Crater.
“When the MRO image was taken, Curiosity was partway between its investigation of active sand dunes lower on Mount Sharp, and “Vera Rubin Ridge,” a destination uphill where the rover team intends to examine outcrops where hematite has been identified from Mars orbit,” says NASA.
“HiRISE has been imaging Curiosity about every three months, to monitor the surrounding features for changes such as dune migration or erosion.”
The MRO image has been color enhanced and shows Curiosity as a bright blue feature. It is currently traveling on the northwestern flank of Mount Sharp. Curiosity is approximately 10 feet long and 9 feet wide (3.0 meters by 2.8 meters).
“The exaggerated color, showing differences in Mars surface materials, makes Curiosity appear bluer than it really looks. This helps make differences in Mars surface materials apparent, but does not show natural color as seen by the human eye.”
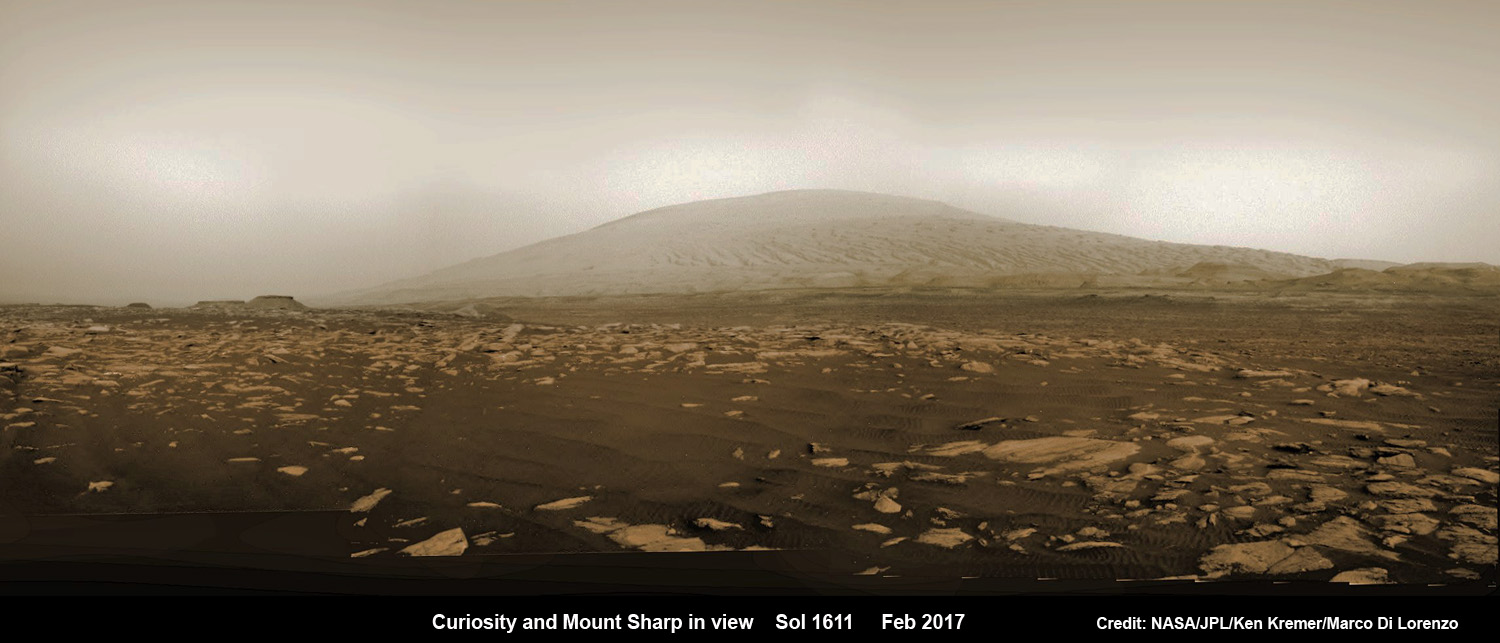
See our mosaic of “Vera Rubin Ridge” and Mount Sharp below.
Curiosity is making rapid progress towards the hematite-bearing location of Vera Rubin Ridge after conducting in-depth exploration of the Bagnold Dunes earlier this year.
“Vera Rubin Ridge is a high-standing unit that runs parallel to and along the eastern side of the Bagnold Dunes,” says Mark Salvatore, an MSL Participating Scientist and a faculty member at Northern Arizona University, in a new mission update.
“From orbit, Vera Rubin Ridge has been shown to exhibit signatures of hematite, an oxidized iron phase whose presence can help us to better understand the environmental conditions present when this mineral assemblage formed.”
Curiosity will use her cameras and spectrometers to elucidate the origin and nature of Vera Rubin Ridge and potential implications or role in past habitable environments.
“The rover will turn its cameras to Vera Rubin Ridge for another suite of high resolution color images, which will help to characterize any observed layers, fractures, or geologic contacts. These observations will help the science team to determine how Vera Rubin Ridge formed and its relationship to the other geologic units found within Gale Crater.”
To reach Vera Rubin Ridge, Curiosity is driving east-northeast around two small patches of dunes just to the north. She will then turn “southeast and towards the location identified as the safest place for Curiosity to ascend the ridge. Currently, this ridge ascent point is approximately 370 meters away.”
Ascending and diligently exploring the sedimentary lower layers of Mount Sharp, which towers 3.4 miles (5.5 kilometers) into the Martian sky, is the primary destination and goal of the rovers long term scientific expedition on the Red Planet.
“Lower Mount Sharp was chosen as a destination for the Curiosity mission because the layers of the mountain offer exposures of rocks that record environmental conditions from different times in the early history of the Red Planet. Curiosity has found evidence for ancient wet environments that offered conditions favorable for microbial life, if Mars has ever hosted life,” says NASA.
As of today, Sol 1733, June 21, 2017, Curiosity has driven over 10.29 miles (16.57 kilometers) since its August 2012 landing inside Gale Crater, and taken over 420,000 amazing images.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
………….
Learn more about the upcoming SpaceX launch of BulgariaSat 1, recent SpaceX Dragon CRS-11 resupply launch to ISS, NASA missions and more at Ken’s upcoming outreach events at Kennedy Space Center Quality Inn, Titusville, FL:
June 22-24: “SpaceX BulgariaSat 1 launch, SpaceX CRS-11 and CRS-10 resupply launches to the ISS, Inmarsat 5 and NRO Spysat, EchoStar 23, SLS, Orion, Commercial crew capsules from Boeing and SpaceX , Heroes and Legends at KSCVC, ULA Atlas/John Glenn Cygnus launch to ISS, SBIRS GEO 3 launch, GOES-R weather satellite launch, OSIRIS-Rex, Juno at Jupiter, InSight Mars lander, SpaceX and Orbital ATK cargo missions to the ISS, ULA Delta 4 Heavy spy satellite, Curiosity and Opportunity explore Mars, Pluto and more,” Kennedy Space Center Quality Inn, Titusville, FL, evenings
Recent Posts
Where’s the Most Promising Place to Find Martian Life?
New research suggests that our best hopes for finding existing life on Mars isn’t on…
Can Entangled Particles Communicate Faster than Light?
Entanglement is perhaps one of the most confusing aspects of quantum mechanics. On its surface,…

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
IceCube Just Spent 10 Years Searching for Dark Matter
Neutrinos are tricky little blighters that are hard to observe. The IceCube Neutrino Observatory in…
Star Devouring Black Hole Spotted by Astronomers
A team of astronomers have detected a surprisingly fast and bright burst of energy from…
What Makes Brown Dwarfs So Weird?
Meet the brown dwarf: bigger than a planet, and smaller than a star. A category…
Archaeology On Mars: Preserving Artifacts of Our Expansion Into the Solar System
In 1971, the Soviet Mars 3 lander became the first spacecraft to land on Mars,…