
Through the Artemis Program, NASA intends to send astronauts back to the Moon for the first time since the Apollo Era. But this time, they intend to stay and establish a lunar base and other infrastructure by the end of the decade that will allow for a "sustained program of lunar exploration and development." To accomplish this, NASA is enlisting the help of fellow space agencies, commercial partners, and academic institutions to create the necessary mission elements - these range from the launch systems, spacecraft, and human landing systems to the delivery of payloads.
With NASA funding, a team of engineers from the University of Arizona College of Engineering (UA-CE) is developing autonomous robot networks to build sandbag shelters for NASA astronauts on the Moon. The designs are inspired by cathedral termite mounds, which are native to Africa and northern Australia's desert regions. Their work was the subject of a paper presented at the American Astronautical Society Guidance, Navigation, and Control (AAS GNC) Conference, which took place from February 1st to 7th in Littleton and Breckinridge, Colorado.
The team was led by Associate Professor Jekan Thanga of the UA-CE Department of Aerospace and Mechanical Engineering, who is also the head of the Space and Terrestrial Robotic Exploration (SpaceTREx) Laboratory and the NASA-supported Asteroid Science, Technology and Exploration Research Organized by Inclusive eDucation Systems (ASTEROIDS) Laboratory. He and his team are partnering with NASA's Jet Propulsion Laboratory and the Canadian space robotics company MDA to create the LUNAR-BRIC consortium, which is developing the technology for the Artemis Program.

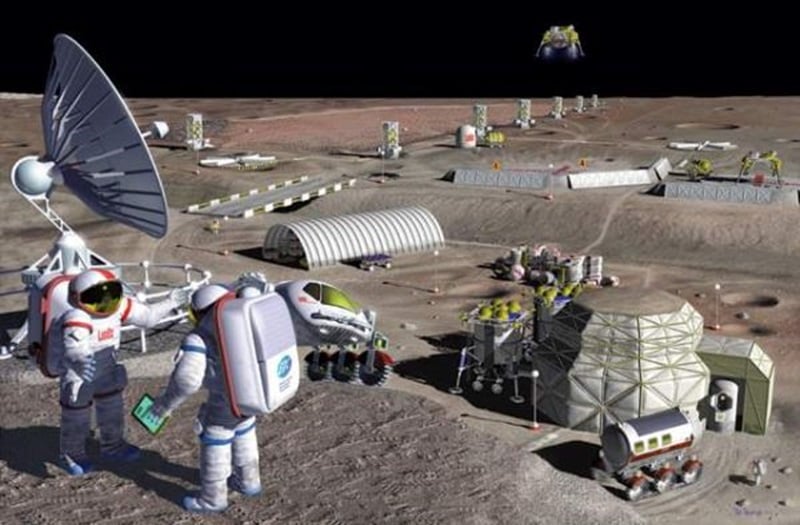
Per the Artemis Program, NASA will land astronauts around the lunar south pole with the Artemis III mission, currently scheduled for 2026/27. By the end of the decade, they plan to build the infrastructure for long-duration stays, like the Lunar Gateway and the Artemis Base Camp. The latter element consists of a Foundation Lunar Habitat (FLH), the Lunar Terrain Vehicle (LTV), and a Habitation Mobility Platform (HMB). However, they will also need semi-permanent safe shelters while they search for optimal locations to build permanent habitats.
Consistent with NASA's vision for future space exploration, a key element in this plan is to leverage local resources for building materials and resources - a process known as In-Situ Resource Utilization (ISRU). For their concept, Thanga and his team investigated whether sandbags filled with lunar regolith could be used instead of traditional building materials to build lunar infrastructure. This includes housing, warehouses, control towers, robot facilities, landing pads, and blast walls to protect lunar buildings as spacecraft conduct takeoffs and landings.
Thanga was first inspired by a YouTube video showing the work of Iranian-born American architect Nader Khalili, best known for designing structures that incorporate unconventional building materials. This includes his development of SuperAdobe sandbag construction to create structures for the developing world and emergency situations. During the 1980s, the late architect proposed building sandbag structures on the Moon and other extraterrestrial locations. Thanga incorporated the concept of insect "skyscrapers" into Khalili's ideas, specifically the tall-standing cathedral termite mounds.
These mounds are common in African and Australian deserts and are important in regulating the subterranean nest environment. As Thanga described in a UA College of Engineering News release:
"In the case of the termites, it's very relevant to our off-world challenges. The extreme desert environments the termites face are analogous to lunar conditions. Importantly, this whole approach doesn't rely on water. Most of the moon is bone-dry desert. Learning about that helped direct me toward distributed systems for construction."
Thanga has long been interested in applying insect social systems to distributed robot networks where machines are organized by swarm intelligence to work cooperatively without human intervention. In their system, the robots embed sensors and electronics in sandbags, fill them with lunar regolith, and then use these to assemble the structures in place. Some sensors provide location data to help the robots place the sandbags, while others provide communication capabilities and environmental information to warn of potential dangers.
These include moonquakes, which result from heating and cooling during every lunar day and night (which last 14 days each). The temperature swings during this cycle are also a potential hazard, ranging from -183 to 107 °C (-298 to 224 °F) between day and night. Because the Moon is an airless environment, there's also the threat of micro-meteors that bombard the surface at an average speed of 96,560 km/h (60,000 mph). The lack of an atmosphere (and a magnetosphere) also means the lunar surface is exposed to considerably more solar radiation and cosmic rays.
These buildings meet NASA's requirements for the Artemis Program by reducing the amount of material that must be transported to the Moon while protecting the harsh lunar environment. NASA has granted Thanga and his team $500,000 for lunar surface projects through the agency's Space Technology Artemis Research program (M-STAR), part of the Minority University Research and Education Project (MUREP). NASA has also provided $1 million annually for UA student research projects over the last five years through a MUREP Institutional Research Opportunity (MIRO). Said Thanga:
"The goal is to raise the participation of underrepresented groups in aerospace. And these are hands-on, student-centric projects. This lab offers me the exact environment – it's startup culture. I'm leading a team and working with multidisciplinary people. I'm glad I'm here."
Thanga and Sivaperuman Muniyasamy, an aerospace engineering doctoral student and first author on the paper describing the technology, presented their idea during a classified session of the AAS GNC. "By publishing the paper at the conference, we're gaining feedback from other experts that really helps us move forward," said Muniyasamy. "It's no accident this team has an academic partner, a commercial partner, and a government agency," Thanga added. "Given the challenges, part of the path is for us to collaborate."
Beyond the team's plans for lunar habitats, the LUNAR-BRIC consortium plans to produce many concepts that will support the creation of a space economy. In addition to leading a team of eight undergraduate and master's students working on lunar surface projects, Muniyasamy plans to launch a space mining company after completing his Ph.D. As he noted, NASA plans to build facilities for long-term habitation and industry within a few years of the successful landing of *Artemis III* that will enable (among other things) environmentally responsible lunar and asteroid mining.
Thanga and his student team worked with the university commercialization arm (Tech Launch Arizona) to file patents on the robotic system and the distributed computer processing networks that link the proposed structures and robots.
*Further Reading: The University of Arizona*