Robotics Refueling Research Scores Huge Leap at Space Station
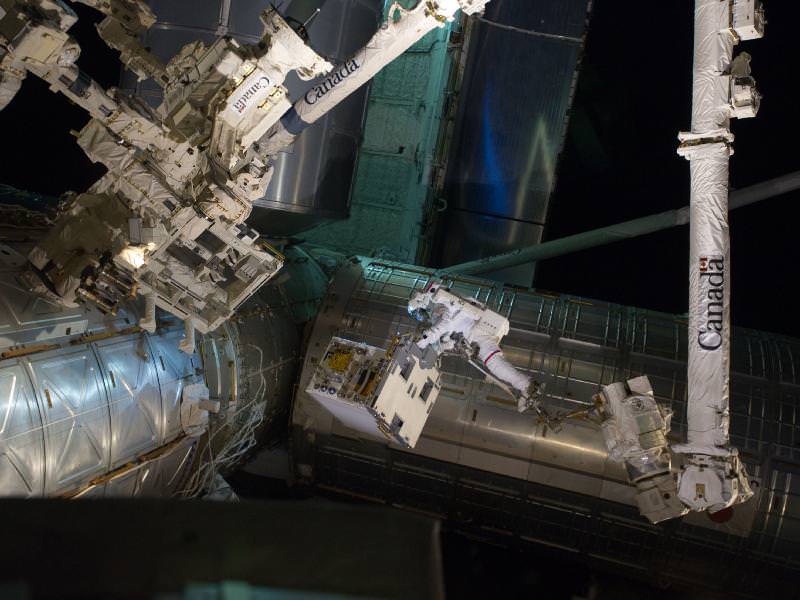
Canada’s Dextre robot (highlight) and NASA’s Robotic Refueling Experiment jointly performed groundbreaking robotics research aboard the ISS in March 2012. Dextre used its hands to grasp specialized work tools on the RRM for experiments to repair and refuel orbiting satellites. Credit: NASA
[/caption]
A combined team of American and Canadian engineers has taken a major first step forward by successfully applying new, first-of-its-kind robotics research conducted aboard the International Space Station (ISS) to the eventual repair and refueling of high value orbiting space satellites, and which has the potential to one day bring about billions of dollars in cost savings for the government and commercial space sectors.
Gleeful researchers from both nations shouted “Yeah !!!” – after successfully using the Robotic Refueling Mission (RRM) experiment – bolted outside the ISS- as a technology test bed to demonstrate that a remotely controlled robot in the vacuum of space could accomplish delicate work tasks requiring extremely precise motion control. The revolutionary robotics experiment could extend the usable operating life of satellites already in Earth orbit that were never even intended to be worked upon.
“After dedicating many months of professional and personal time to RRM, it was a great emotional rush and a reassurance for me to see the first video stream from an RRM tool,” said Justin Cassidy in an exclusive in-depth interview with Universe Today. Cassidy is RRM Hardware Manager at the NASA Goddard Spaceflight Center in Greenbelt, Maryland.
In March 2012, RRM and Canada’s Dextre Robot jointly acccomplised fundamental leap forward in robotics research aboard the ISS. Spacewalker Mike Fossum rides on the International Space Station's robotic arm as he carries the Robotic Refueling Mission experiment. This was the final scheduled spacewalk during a shuttle mission. Credit: NASA
And the RRM team already has plans to carry out even more ambitious follow on experiments starting as soon as this summer, including the highly anticipated transfer of fluids to simulate an actual satellite refueling that could transfigure robotics applications in space – see details below !
All of the robotic operations at the station were remotely controlled by flight controllers from the ground. The purpose of remote control and robotics is to free up the ISS human crew so they can work on other important activities and conduct science experiments requiring on-site human thought and intervention.
Over a three day period from March 7 to 9, engineers performed joint operations between NASA’s Robotic Refueling Mission (RRM) experiment and the Canadian Space Agency’s (CSA) robotic “handyman” – the Dextre robot. Dextre is officially dubbed the SPDM or Special Purpose Dexterous Manipulator.
On the first day, robotic operators on Earth remotely maneuvered the 12-foot (3.7 meter) long Dextre “handyman” to the RRM experiment using the space station’s Canadian built robotic arm (SSRMS).
Dextre’s “hand” – technically known as the “OTCM” – then grasped and inspected three different specialized satellite work tools housed inside the RRM unit . Comprehensive mechanical and electrical evaluations of the Safety Cap Tool, the Wire Cutter and Blanket Manipulation Tool, and the Multifunction Tool found that all three tools were functioning perfectly.
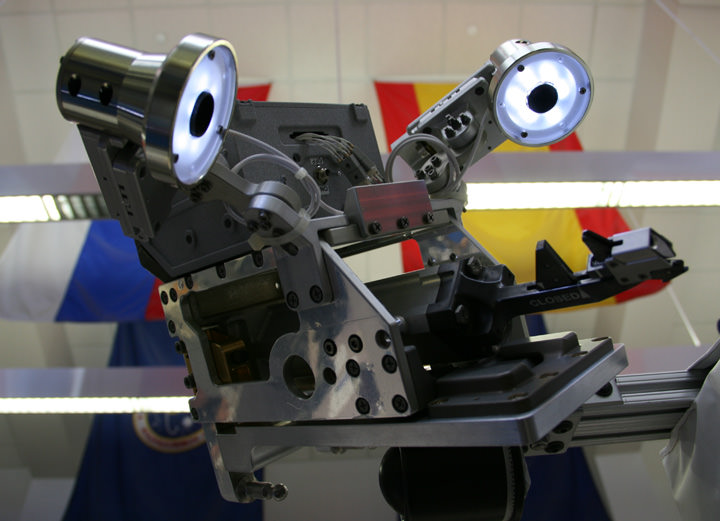
on display at Kennedy Space Center Press Site. Dextre robot grasped the WCT with its hands and successfully snipped 2 ultra thin wires during the March 2012 RRM experiments. Credit: Ken Kremer
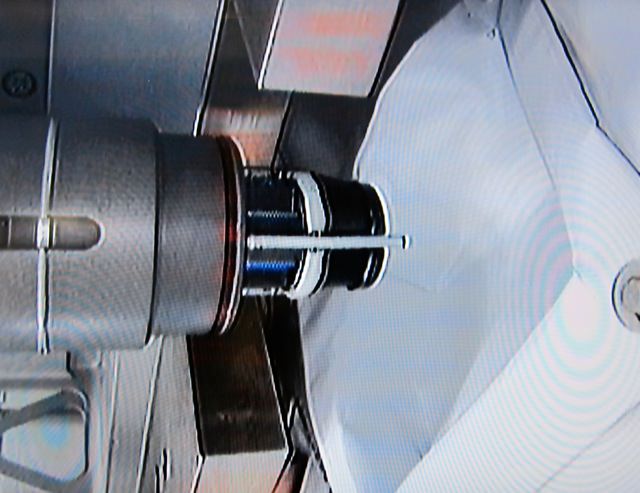
“Our teams mechanically latched the Canadian “Dextre” robot’s “hand” onto the RRM Safety Cap Tool (SCT). The RRM SCT is the first on orbit unit to use the video capability of the Dextre OTCM hand,” Cassidy explained.
“At the beginning of tool operations, mission controllers mechanically drove the OTCM’s electrical umbilical forward to mate it with the SCT’s integral electronics box. When the power was applied to that interface, our team was able to see that on Goddard’s large screen TVs – the SCT’s “first light” video showed a shot of the tool within the RRM stowage bay (see photo).
“Our team burst into a shout out of “Yeah!” to commend this successful electrical functional system checkout.”
Dextre then carried out assorted tasks aimed at testing how well a variety of representative gas fittings, valves, wires and seals located on the outside of the RRM module could be manipulated. It released safety launch locks and meticulously cut two extremely thin satellite lock wires – made of steel – and measuring just 20 thousandths of an inch (0.5 millimeter) in diameter.
“The wire cutting event was just minutes in duration. But both wire cutting tasks took approximately 6 hours of coordinated, safe robotic operations. The lock wire had been routed, twisted and tied on the ground at the interface of the Ambient Cap and T-Valve before flight,” said Cassidy.
This RRM exercise represents the first time that the Dextre robot was utilized for a technology research and development project on the ISS, a major expansion of its capabilities beyond those of robotic maintenance of the massive orbiting outpost.
Video Caption: Dextre’s Robotic Refueling Mission: Day 2. The second day of Dextre’s most demanding mission wrapped up successfully on March 8, 2012 as the robotic handyman completed his three assigned tasks. Credit: NASA/CSA
Altogether the three days of operations took about 43 hours, and proceeded somewhat faster than expected because they were as close to nominal as could be expected.
“Days 1 and 2 ran about 18 hours,” said Charles Bacon, the RRM Operations Lead/Systems Engineer at NASA Goddard, to Universe Today. “Day 3 ran approximately 7 hours since we finished all tasks early. All three days baselined 18 hours, with the team working in two shifts. So the time was as expected, and actually a little better since we finished early on the last day.”
“For the last several months, our team has been setting the stage for RRM on-orbit demonstrations,” Cassidy told me. “Just like a theater production, we have many engineers behind the scenes who have provided development support and continue to be a part of the on-orbit RRM operations.”
“At each stage of RRM—from preparation, delivery, installation and now the operations—I am taken aback by the immense efforts that many diverse teams have contributed to make RRM happen. The Satellite Servicing Capabilities Office at NASA’s Goddard Space Flight Center teamed with Johnson Space Center, Kennedy Space Center (KSC), Marshall Space Flight Center and the Canadian Space Agency control center in St. Hubert, Quebec to make RRM a reality.”
“The success of RRM operations to date on the International Space Station (ISS) using Dextre is a testament to the excellence of NASA’s many organizations and partners,” Cassidy explained.
The three day “Gas Fittings Removal task” was an initial simulation to practice techniques essential for robotically fixing malfunctioning satellites and refueling otherwise nominally operating satellites to extend to hopefully extend their performance lifetimes for several years.
Ground-based technicians use the fittings and valves to load all the essential fluids, gases and fuels into a satellites storage tanks prior to launch and which are then sealed, covered and normally never accessed again.
“The impact of the space station as a useful technology test bed cannot be overstated,” says Frank Cepollina, associate director of the Satellite Servicing Capabilities Office (SSCO) at NASA’s Goddard Space Flight Center in Greenbelt, Md.
“Fresh satellite-servicing technologies will be demonstrated in a real space environment within months instead of years. This is huge. It represents real progress in space technology advancement.”
Four more upcoming RRM experiments tentatively set for this year will demonstrate the ability of a remote-controlled robot to remove barriers and refuel empty satellite gas tanks in space thereby saving expensive hardware from prematurely joining the orbital junkyard.
The timing of future RRM operations can be challenging and depends on the availability of Dextre and the SSRMS arm which are also heavily booked for many other ongoing ISS operations such as spacewalks, maintenance activities and science experiments as well as berthing and/or unloading a steady stream of critical cargo resupply ships such as the Progress, ATV, HTV, Dragon and Cygnus.
Flexibility is key to all ISS operations. And although the station crew is not involved with RRM, their activities might be.
“While the crew itself does not rely on Dextre for their operations, Dextre ops can indirectly affect what the crew can or can’t do,” Bacon told me. “For example, during our RRM operations the crew cannot perform certain physical exercise activities because of how that motion could affect Dextre’s movement.”
Here is a list of forthcoming RRM operations – pending ISS schedule constraints:
- Refueling (summer 2012) – After Dextre opens up a fuel valve that is similar to those commonly used on satellites today, it will transfer liquid ethanol into it through a sophisticated robotic fueling hose.
-
Thermal Blanket Manipulation (TBD 2012)- Dextre will practice slicing off thermal blanket tape and folding back a thermal blanket to reveal the contents underneath.
-
Screw (Fastener) Removal (TBD 2012)- Dextre will robotically unscrew satellite bolts (fasteners).
-
Electrical Cap Removal (TBD 2012)- Dextre will remove the caps that would typically cover a satellite’s electrical receptacle.
http://youtu.be/LboVN38ZdgU
RRM was carried to orbit inside the cargo bay of Space Shuttle Atlantis during July 2011 on the final shuttle mission (STS-135) of NASA’s three decade long shuttle program and then mounted on an external work platform on the ISS backbone truss by spacewalking astronauts. The project is a joint effort between NASA and CSA.
“This is what success is all about. With RRM, we are truly paving the way for future robotic exploration and satellite servicing,” Cassidy concluded.
Equipment Tool movements and manipulations by Dextre robot are simulated by NASA Goddard RRM manager Justin Cassidy. Credit: Ken Kremer
…….
March 24 (Sat): Free Lecture by Ken Kremer at the New Jersey Astronomical Association, Voorhees State Park, NJ at 830 PM. Topic: Atlantis, the End of Americas Shuttle Program, RRM, Orion, SpaceX, CST-100 and the Future of NASA Human & Robotic Spaceflight
Recent Posts
NASA is Developing Solutions for Lunar Housekeeping’s Biggest Problem: Dust!
Through the Artemis Program, NASA will send the first astronauts to the Moon since the…
Where’s the Most Promising Place to Find Martian Life?
New research suggests that our best hopes for finding existing life on Mars isn’t on…

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Can Entangled Particles Communicate Faster than Light?
Entanglement is perhaps one of the most confusing aspects of quantum mechanics. On its surface,…
IceCube Just Spent 10 Years Searching for Dark Matter
Neutrinos are tricky little blighters that are hard to observe. The IceCube Neutrino Observatory in…
Star Devouring Black Hole Spotted by Astronomers
A team of astronomers have detected a surprisingly fast and bright burst of energy from…
What Makes Brown Dwarfs So Weird?
Meet the brown dwarf: bigger than a planet, and smaller than a star. A category…