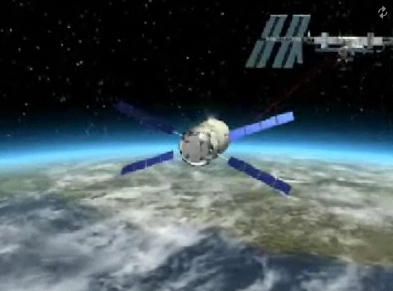
Although ESA’s Automated Transfer Vehicle (ATV) will be approaching the International Space Station (ISS) at a rate slower than tortoise-pace, what would happen if the 20 tonne space truck didn’t slow down as it docks with the station? It wouldn’t be pretty. In all likelihood, the large mass of supplies and metal would cause significant structural damage to the ISS and could be life-threatening to the astronauts on board. To avoid a very big dent in the manned outpost, the ESA’s partners insist that the ATV carry out some practice runs of the Collision Avoidance Manoeuvre (a.k.a. the “emergency brake”)…
The ATV “Jules Verne”, still sitting in an orbital holding pattern awaiting the departure of Space Shuttle Endeavour from the ISS, still must prove its robotic worth. The unmanned supply vehicle is the most advanced spaceship the ESA has ever launched into space and it appears to be performing well. Recent engine problems were quickly and neatly solved and the re-supply mission of the ISS appears to be progressing nicely.
Worked into the schedule of the ATV’s orbit of Earth are some practice manoeuvres – after all, the robot has a lot of time on its hands, a bit of activity should be welcomed.
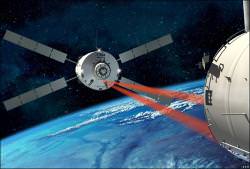
First up is the spaceship equivalent of an emergency brake. The ATV project will have never been allowed near the space station without an emergency procedure should there be a problem during docking. Although the relative speed between the station and approaching ATV will be exceedingly slow, the orbital velocity of both will be approximately 27,000 km/h, so any unforeseen collision or misalignment could be highly dangerous.
So, the Collision Avoidance Manoeuvre will be carried out on Friday, before the ATV is anywhere close to the station to make sure the operation is successful at preventing a mock collision.
The ATV carries countless failsafe measures; critically the robot runs three parallel flight-control computers with an independent computer overseeing them. If something should go wrong, the flight-control computers can be overridden and an avoidance manoeuvre enacted. Also, mission control in Toulouse, France can manually initiate the Collision Avoidance Manoeuvre and so can the ISS astronauts inside the docking module watching events as they unfold. A big red button has even been installed in the Russian Zvezda module to raise the alarm and force the ATV to stop and reverse at 5 km/h.
Source: BBC
The astronauts do it by hitting a big red button on a panel positioned in the Russian Zvezda module.