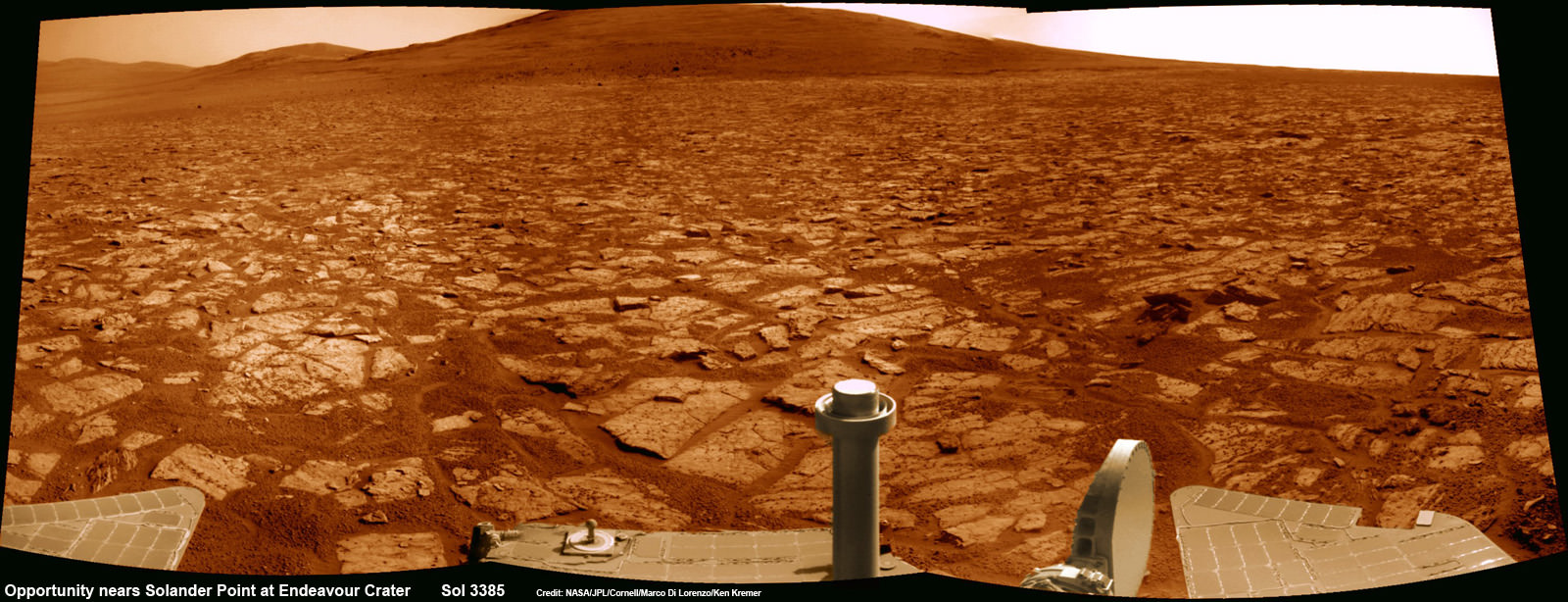
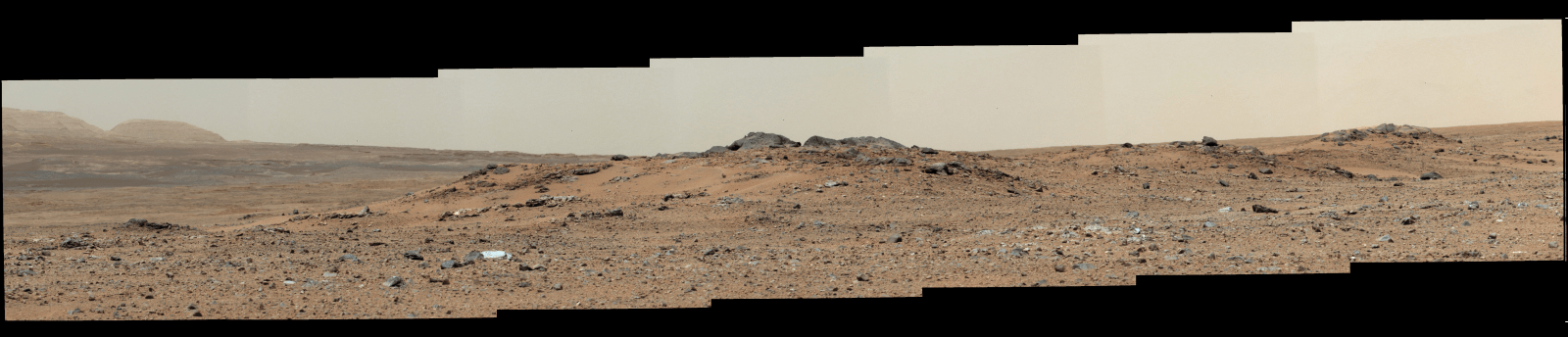
Curiosity Spies Mount Sharp – her primary destination. Curiosity will ascend mysterious Mount Sharp and investigate the sedimentary layers searching for clues to the history and habitability of the Red Planet over billions of years. But first she must safely trespass through the treacherous dark dunes fields. This mosaic was assembled from over 2 dozen Mastcam camera images taken on Sol 352 (Aug 2, 2013). Credit: NASA/JPL-Caltech/MSSS/ Marco Di Lorenzo/Ken Kremer
See the full mosaic below [/caption]
It’s never a dull moment for NASA’s Curiosity rover at T Plus 1 Year since touchdown on the Red Planet and T Minus 1 year to arriving at her primary target, the huge mountain overwhelming the center of the landing site inside Gale Crater.
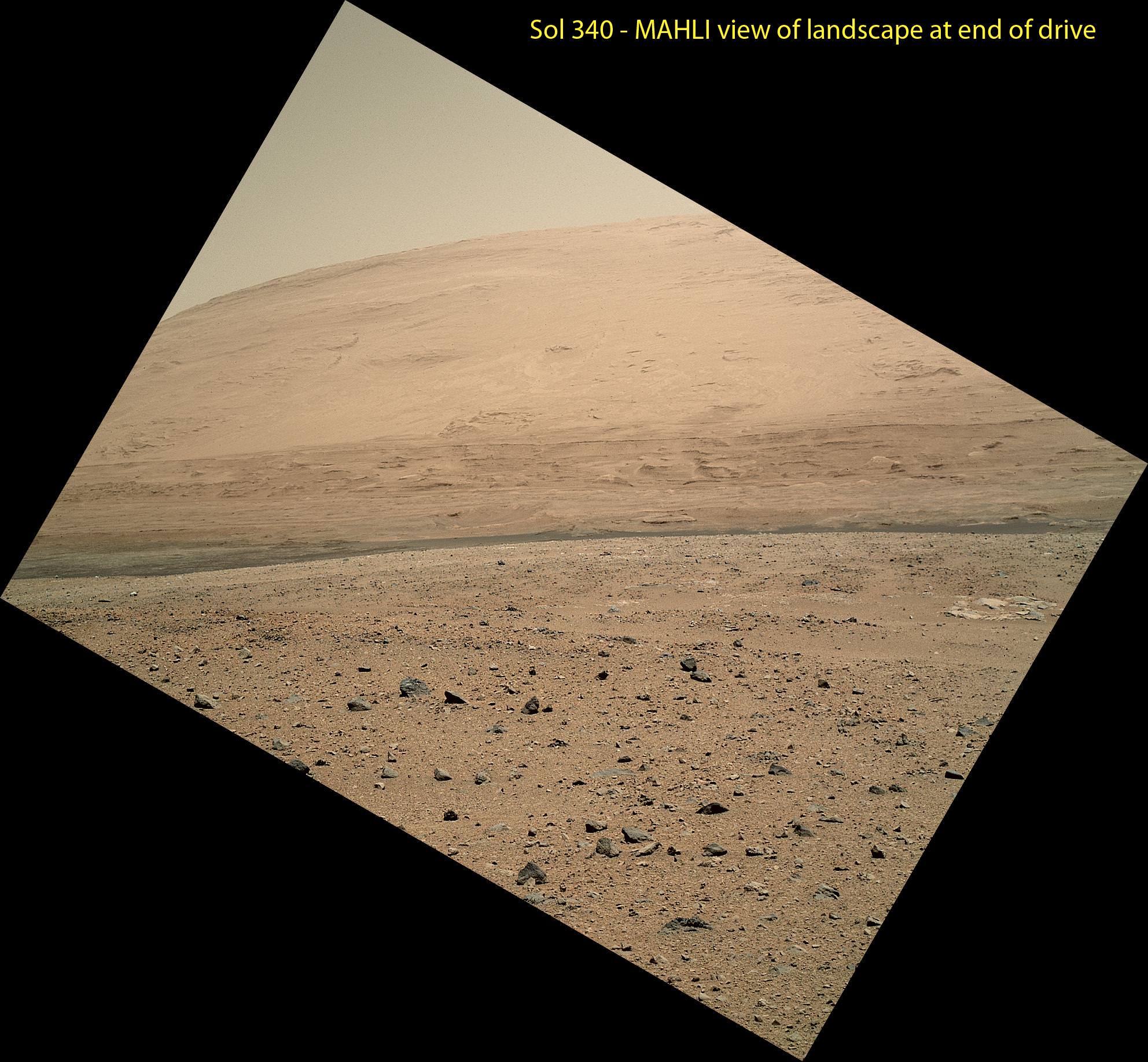
Curiosity is literally and figuratively zooming in on stunningly beautiful and mysterious Mount Sharp (see our new mosaics above/below), her ultimate destination, while conducting ‘Science on the Go’ with her duo of chemistry labs – SAM and CheMin – and 8 other science instruments as she passes the 2 kilometer driving milestone today; Aug 20 !
“We are holding samples for drops to ChemMin and SAM when the science team is ready for it,” Jim Erickson, Curiosity Project Manager of NASA’s Jet Propulsion Laboratory (JPL), told Universe Today in an exclusive interview.
“Curiosity has landed in an ancient river or lake bed on Mars,” Jim Green, Director of NASA’s Planetary Science Division, told Universe Today.
So, those samples were altered by liquid Martian water – a prerequisite for life.

Credit: NASA/JPL-Caltech/MSSS/ Marco Di Lorenzo/Ken Kremer-kenkremer.com
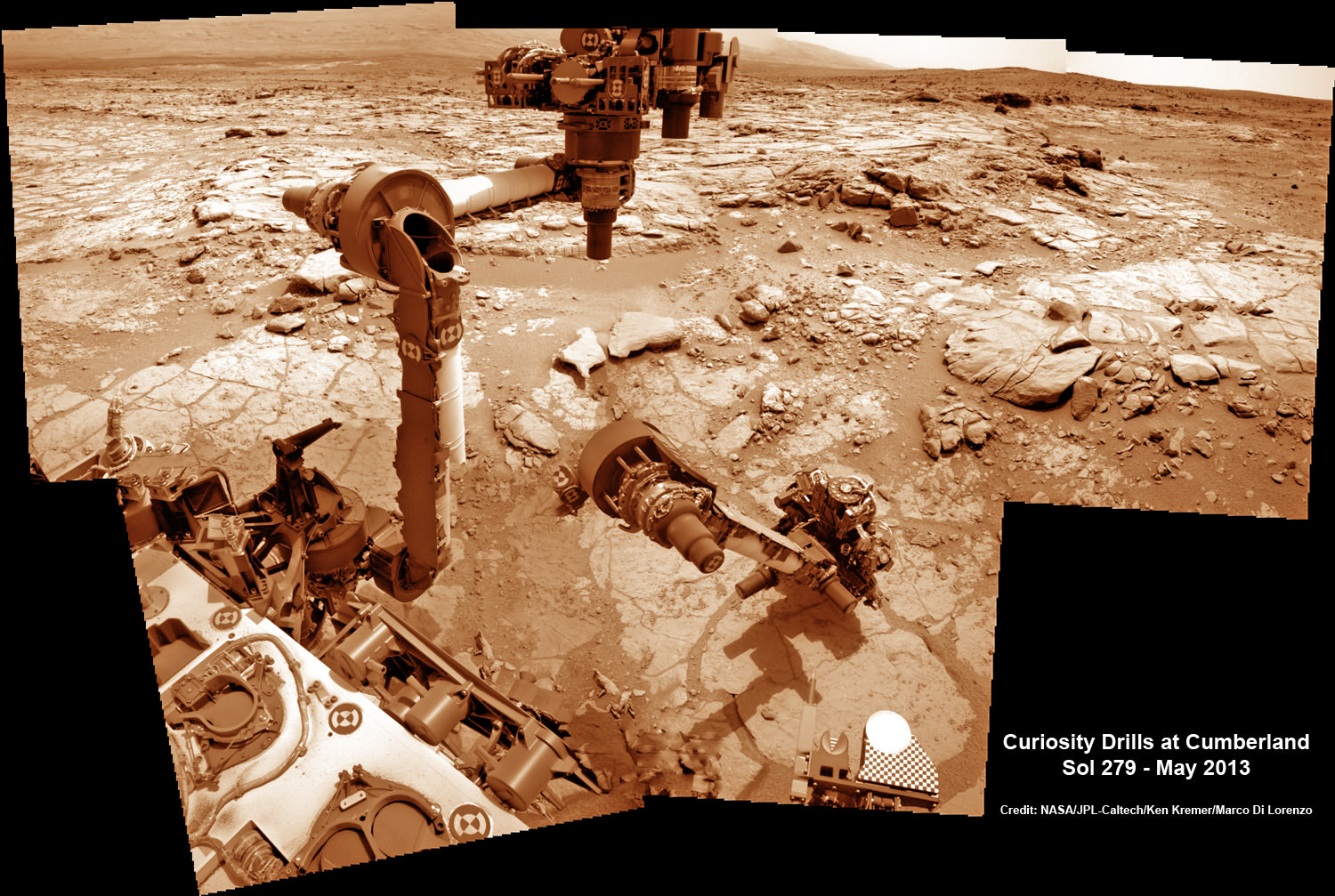
In fact the car sized rover has saved samples from both the ‘John Klein’ and ‘Cumberland’ drill sites collected previously in the ‘Yellowknife Bay’ area for analysis by the miniaturized labs in the rovers belly -when the time is right.
“Curiosity has stored a Cumberland sample and still has a John Klein sample on board for future use,” Erickson explained.
And that time has now arrived!
“We have put a sample from the Cumberland drill hole into SAM for more isotopic measurements,” reported science team member John Bridges in a blog update on Sol 363, Aug. 14, 2013.
“The sample had been cached within the robotic arm’s turret.”
Curiosity is multitasking – conducting increasingly frequent traverses across the relatively smooth floor of Gale Crater while running research experiments for her science handlers back here on Earth.

She’s captured stunning new views of Mount Sharp – rising 5 km (3 miles) high into the sky – and movies of Mars tiny pair of transiting moons while ingesting new portions of the drilled rock samples acquired earlier this year.
Here’s our video compilation of Phobos and Deimos transiting on Aug 1, 2013
Video caption: Transit of Phobos in front of Deimos, taken by MSL right MastCam imager on Sol 351 around 3:12 AM local time (Aug 1, 2013, 8:42 UTC); 16 original frames + 14 interpolated (5x speed-up). Credit: NASA/JPL-Caltech/MSSS/ Marco Di Lorenzo/Ken Kremer
The sample analysis is still in progress.
“The SAM data have not all been received yet,” wrote science team member Ken Herkenhoff in a blog update.
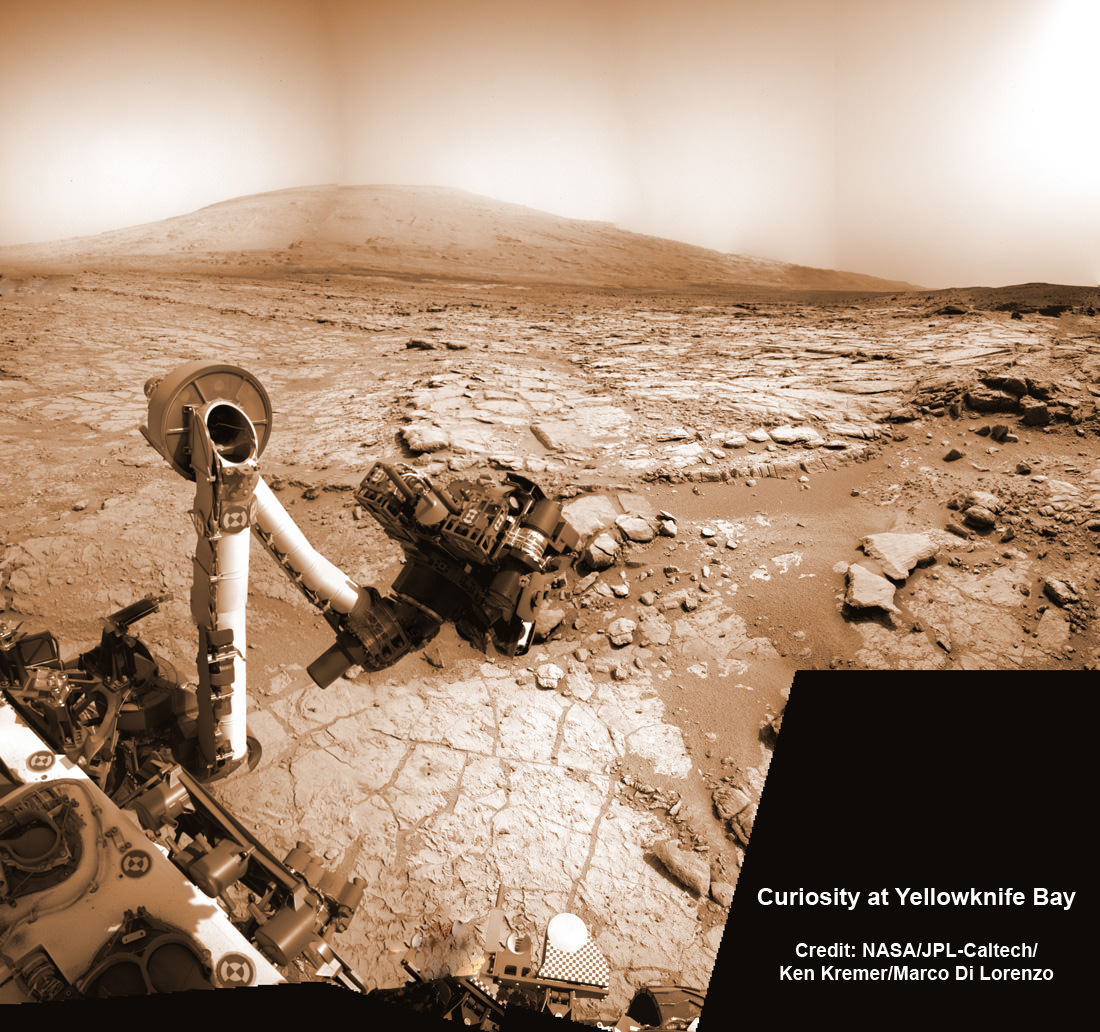
Earlier analysis of sample portions from both ‘John Klein’ and ‘Cumberland’ revealed that the Yellowknife Bay area on Mars possesses the key mineral ingredients proving that Red Planet was once habitable and could have sustained simple microbial life forms.
The scientists are seeking further evidence and have yet to detect organic molecules – which are the building blocks of life as we know it.
Yellowknife Bay resembles a dried out river bed where liquid water once flowed eons ago when the Red Planet was far warmer and wetter than today.
As the 1 ton robot ascends Mount Sharp, she will examine sedimentary layers layed down on ancient Mars over hundreds of millions and perhaps billions of years of past history and habitability.
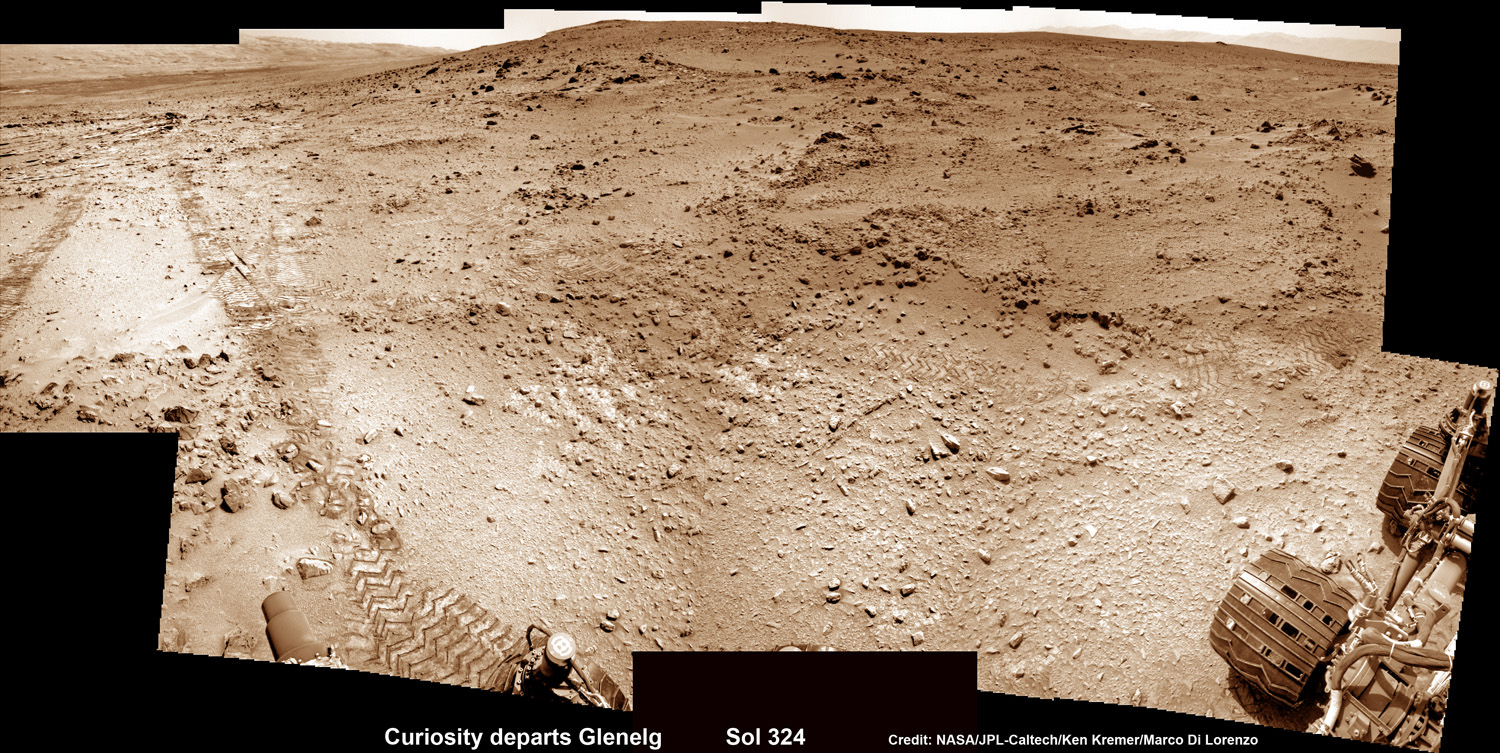
And just as the rover was celebrating 1 year on Mars on Aug 5/6, she found an intriguing sand dune on Sol 354. See our mosaic
“The rover paused to take images of its tracks after crossing a windblown ripple,” Herkenhoff reported.
As the six wheeled rover approaches Mount Sharp over the next year, she will eventually encounter increasing treacherous dunes that she must cross before beginning her mountain climbing foray.
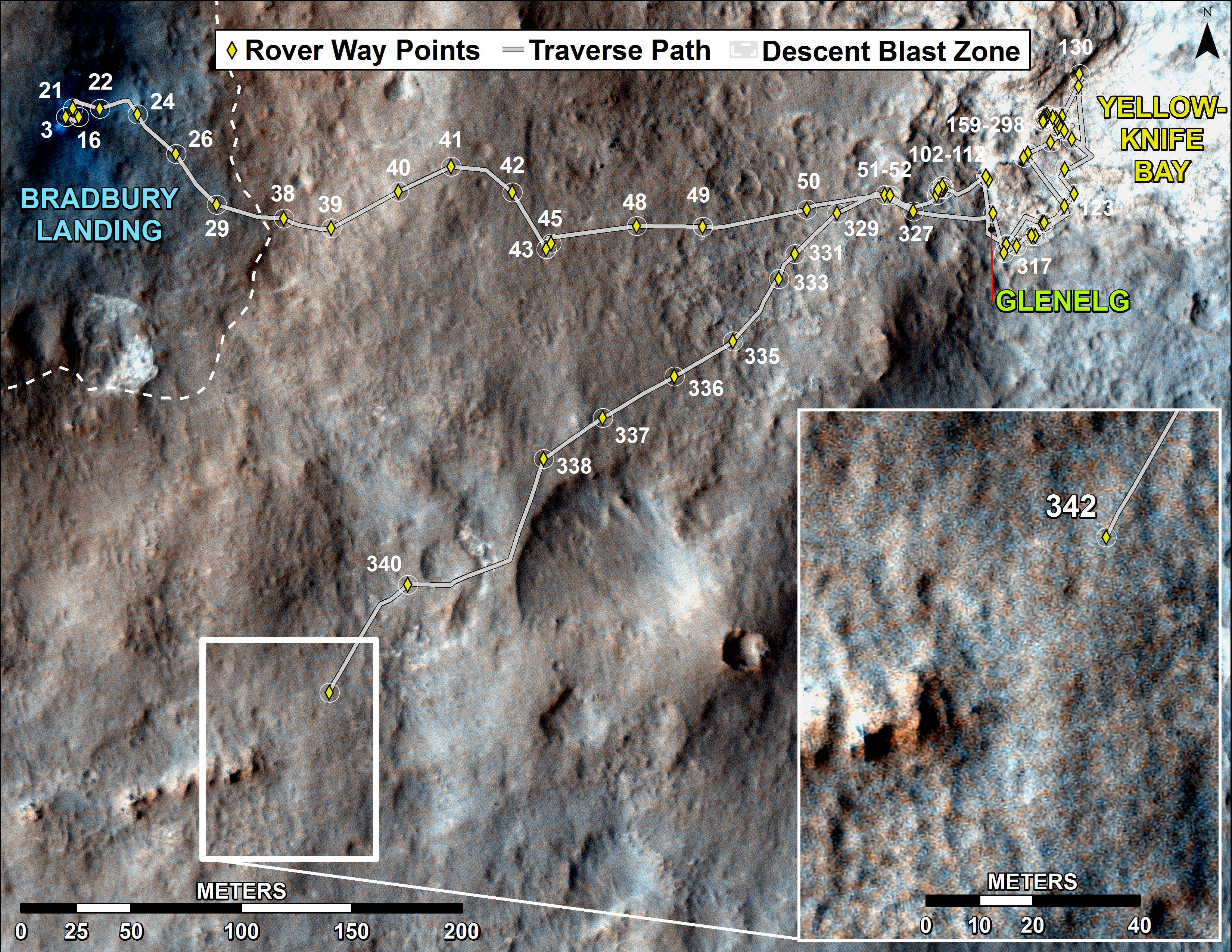
As of today, Sol 369 (Aug. 20) Curiosity has broken through the 2 kilometer driving mark with a new 70 meter drive, snapped over 75,000 images and fired over 75,000 laser shots.
Mount Sharp is about 8 kilometers (5 miles) distant as the Martian crow flies.
How long will the journey to Mount Sharp require?
“Perhaps about a year,” Erickson told me. “We are trying to make that significantly faster by bringing autonav [autonomous navigation software] online.”
“That will help. But how much it helps really depends on the terrain.”
So far so good.
Meanwhile NASA’s next Mars orbiter called MAVEN (for Mars Atmosphere and Volatile Evolution), recently arrived at the Kennedy Space Center after a cross country flight.
Kennedy technicians are completing assembly and check out preparations for MAVEN’s blastoff to the Red Planet on Nov. 18 from Florida atop an Atlas V rocket similar to the one that launched Curiosity nearly 2 years ago.
And I’ll be at Kennedy to report up close on MAVEN’s launch.
Stay tuned.