If you’ve been following the spectacular adventures of NASA’s Curiosity Mars rover since the nerve wracking Sky Crane touchdown just 3 months ago, then PBS NOVA TV has a sweet treat in store for you – Viewer Alert !
Be sure to tune in Wednesday night Nov.14 at 9 PM EDT/PDT for the premiere broadcast of NOVA’s thrilling new documentary titled “Ultimate Mars Challenge” on your local PBS station. The highly acclaimed NOVA science series has been decorated with numerous major television awards.
Get a preview of the show by watching this short 30 second trailer below, featuring the top scientists and engineers who created and gave birth to the Curiosity Mars Science Laboratory (MSL) mission at NASA field centers and University’s and aerospace companies spread across the US and Europe – and then guided her to an unprecedented pinpoint landing beside a layered Martian mountain in search of the ingredients of life.
‘Ultimate Mars Challenge’ also features several Curiosity mosaics specially created for the program by the image processing team of Ken Kremer & Marco Di Lorenzo
And in case you miss the show or want to watch it again, check this PBS link to replay the video of episodes of NOVA.
Read this Program Description from PBS for complete details:
“Ultimate Mars Challenge gives viewers a front-row seat for the Curiosity’s thrilling landing as well as the spectacular discoveries to come. The most ambitious robotic geologist ever, Curiosity carries 10 new instruments that will advance the quest for signs that Mars might have once been suitable for life.
But no rover does it alone: Curiosity joins a team that includes the Mars Odyssey, Express, and Reconnaissance orbiters, along with the tireless Opportunity rover. As we reveal the dynamic new picture of Mars that these explorers are painting, we will discover the deep questions raised by forty years of roving Mars: How do we define life? How does life begin and what does it need to survive? Are we alone in the universe?
Why go back to Mars? Far from dead, Mars holds untold potential. Nearly half a century of Mars exploration has yielded tantalizing clues that Mars may once have harbored life—and may harbor it still.
The extraordinary landing of a revolutionary rover named Curiosity—which successfully touched down inside the Gale Crater—means we have wheels down on the planet once again, in the form of the most sophisticated robot ever to rove the Mars surface.
Will NASA’s bold mission and this marvel of technology answer some of our biggest questions and usher in a new golden age of exploration? NOVA goes behind the scenes on NASA’s quest to solve the riddles of the red planet”

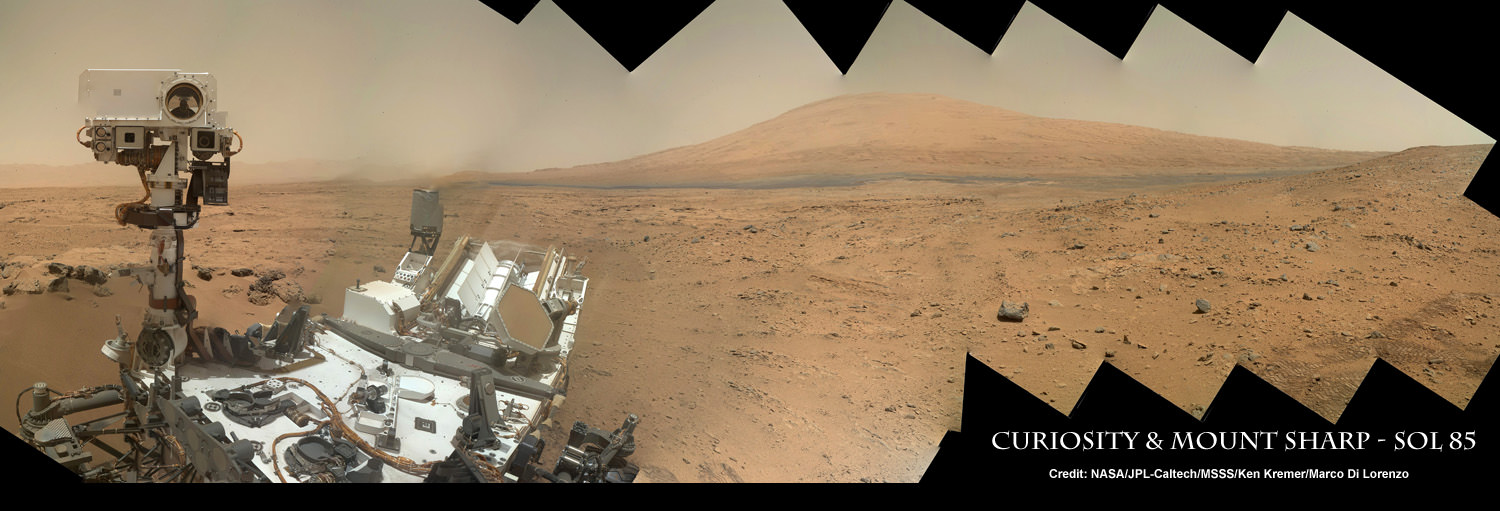
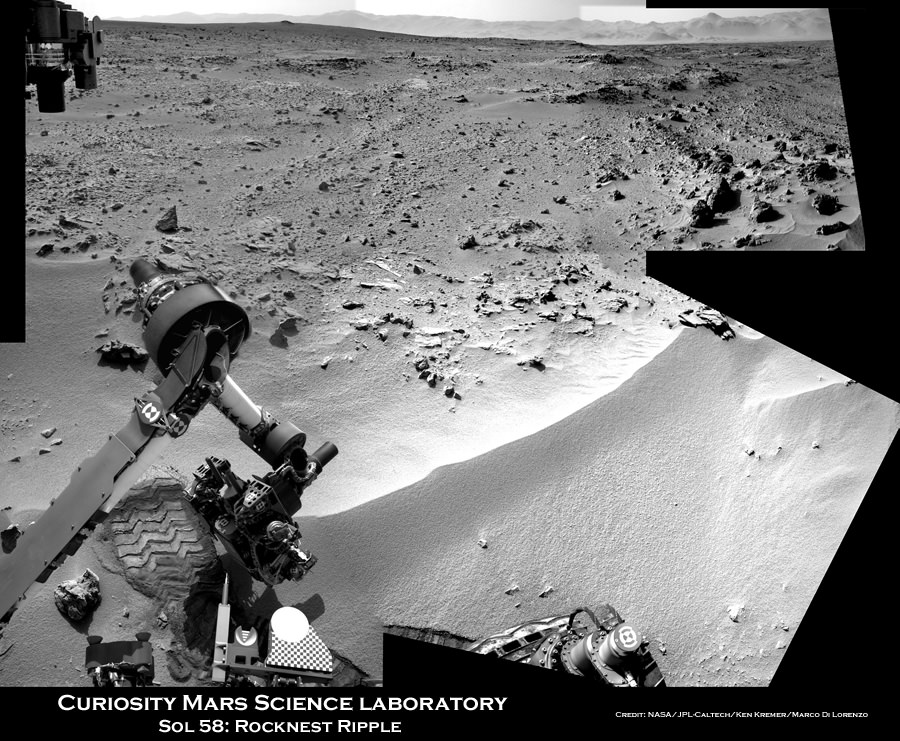
Image Caption: Curiosity Self Portrait with Mount Sharp at Rocknest ripple in Gale Crater. Curiosity used the Mars Hand Lens Imager (MAHLI) camera on the robotic arm to image herself and her target destination Mount Sharp in the background. Mountains in the background to the left are the northern wall of Gale Crater. This color panoramic mosaic was assembled from raw images snapped on Sol 85 (Nov. 1, 2012). Credit: NASA/JPL-Caltech/MSSS/Ken Kremer/Marco Di Lorenzo
‘Ultimate Mars Challenge’ was produced by the Emmy award winning team of Jill Shinefield and Gail Willumsen at Gemini Productions in West Hollywood, California. Jill and Gail were on site at NASA’s Jet Propulsion Lab (JPL) in Pasadena, Calif., to cover the Aug. 5/6 touchdown inside Gale Crater. They say the show just wrapped production in early November, so it’s completely up-to-date through the first 90 Martian days, or Sols, of the 2 year prime mission.
On Nov. 9, Curiosity delivered her first soil sample to the Sample Analysis at Mars (SAM) instrument suite that is designed to detect organic molecules and help determine if Mars ever supported Martian microbial life – watch for my upcoming story.

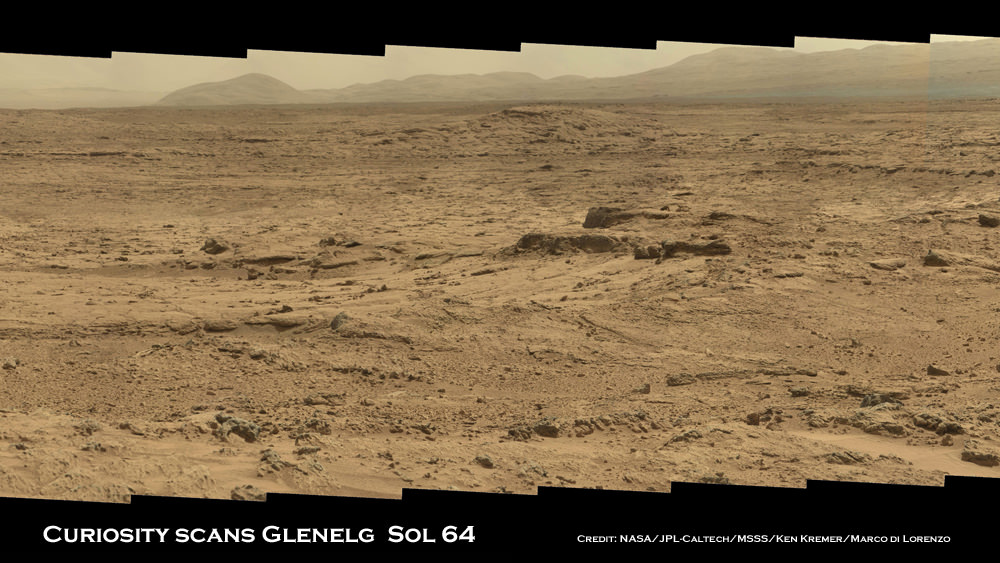
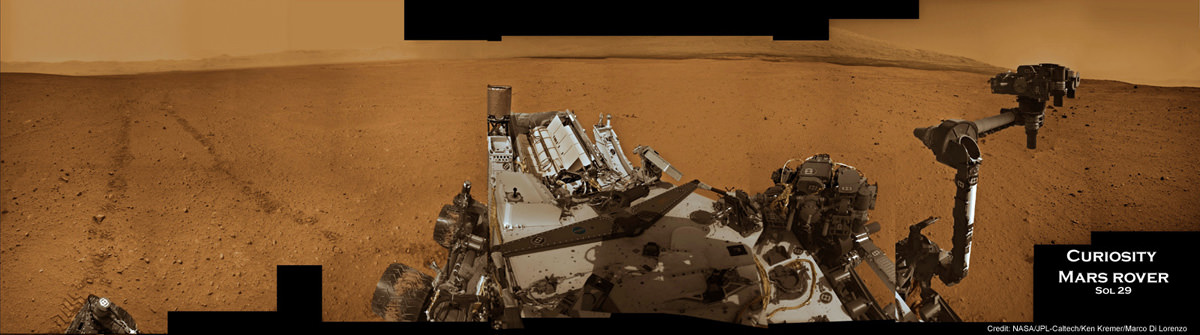
Image caption: Curiosity looks back to her rover tracks and the foothills of Mount Sharp and the eroded rim of Gale Crater in the distant horizon on Sol 24 (Aug. 30, 2012). This panorama is featured on PBS NOVA Ultimate Mars Challenge’ documentary premiering on Nov. 14. The colorized mosaic was stitched together from Navcam images. Credit: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Check the PBS, NASA and JPL websites for mission details. Later this week on Nov. 16, I’ll be presenting a free public talk about the mission titled “Curiosity and the Search for Life on Mars (3-D)”, at Union County College in NJ, hosted by Amateur Astronomers Inc. (AAI) in Cranford, NJ. And the power is thankfully back on ! – in the aftermath of Hurricane Sandy.
Ken Kremer
…..
Nov. 16: Free Public Lecture titled “Curiosity and the Search for Life on Mars (in 3 D)” and more by Ken Kremer at Union County College and Amateur Astronomers Inc in Cranford, NJ.
Dec 6: Free Public lecture titled “Atlantis, The Premature End of America’s Shuttle Program and What’s Beyond for NASA” including Curiosity, Orion, SpaceX and more by Ken Kremer at Brookdale Community College/Monmouth Museum and STAR Astronomy club in Lincroft, NJ