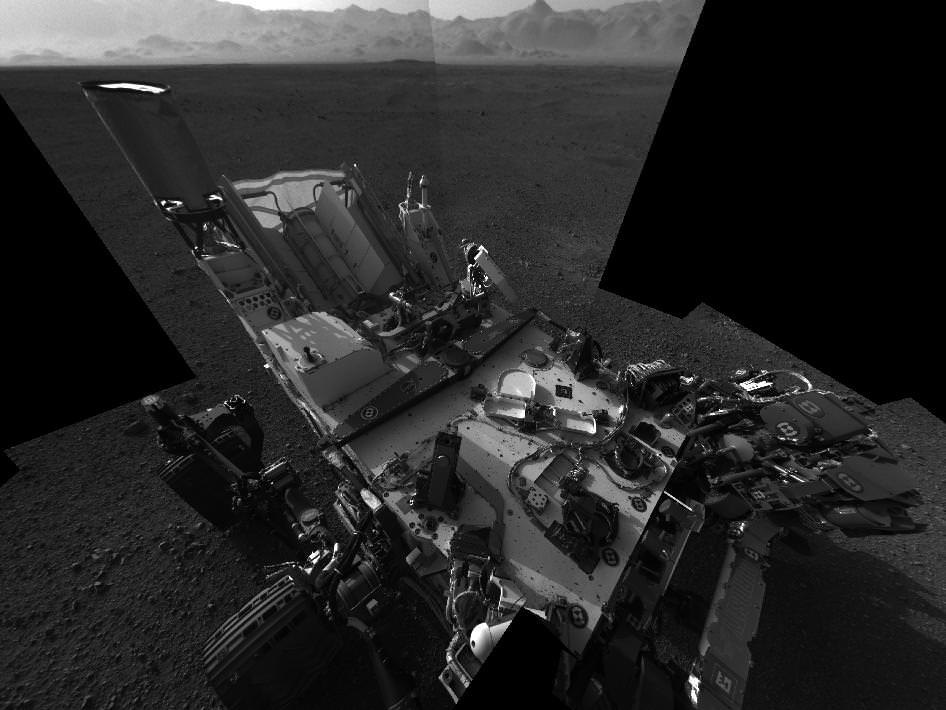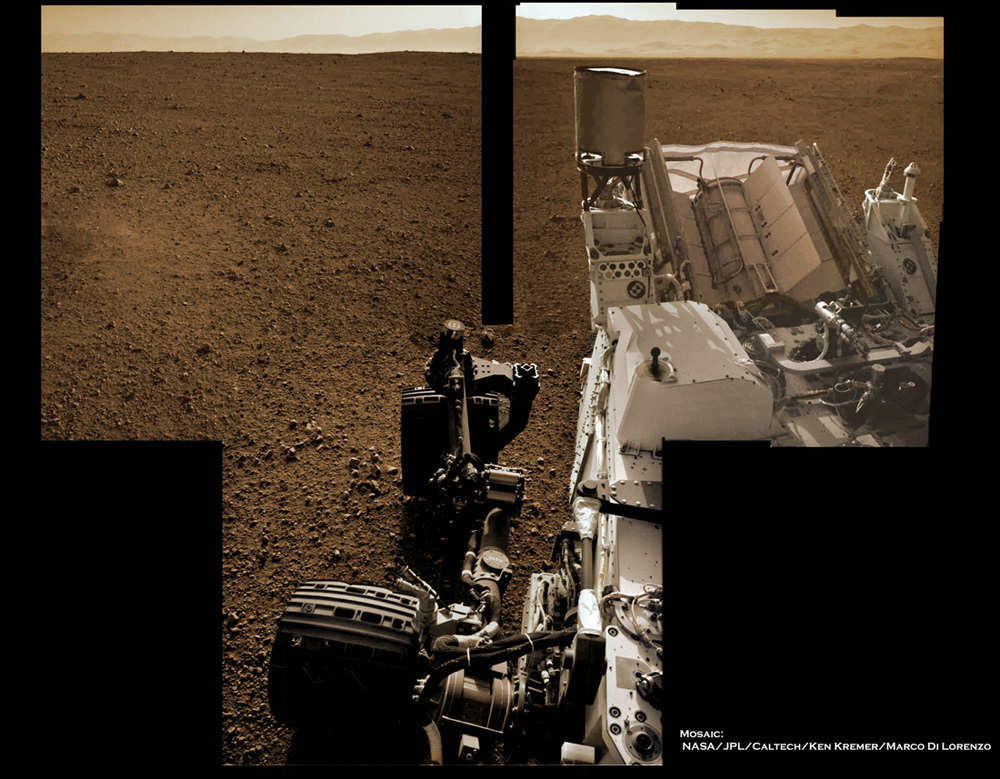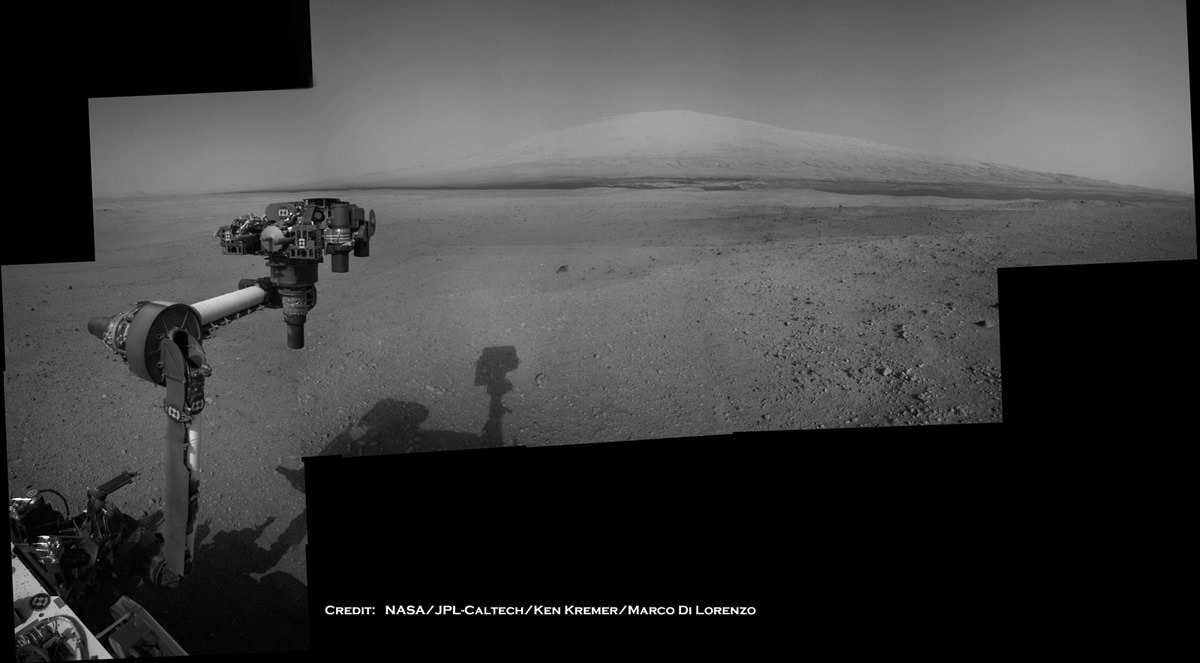
Image Caption: Curiosity Points to Mount Sharp. Curiosity unstowed the robotic arm on Aug. 20 and aimed it directly at her Martian drive destination – Mount Sharp. This mosaic of the robotic arm was assembled from navigation camera images from Sols 2, 12 and 14 and shows 18,000 foot high Mount Sharp in the background and the shadow of the martian robot’s head at center. Curiosity will search for hydrated minerals using the robotic arm and a neutron detector on the body. Image stitching and processing by Ken Kremer and Marco Di Lorenzo. Credit: NASA/JPL-Caltech/Ken Kremer/Marco Di Lorenzo
Curiosity flexed her mighty robotic arm for the first time on Monday (Aug. 20) and aimed the hand-like tool turret squarely at Mount Sharp, her ultimate driving destination.
If you want to see exactly where Curiosity is headed and why she was sent to Gale Crater, just take a look at the new mosaic assembled by Ken Kremer and Marco Di Lorenzo.
Curiosity is pointing with her robotic arm right at Mount Sharp, the huge 18,000 foot tall (5.5 kilometer) mysterious mound that covers the center of the 96 mile (154 km) wide crater. Our mosaic was prominently featured on the front page of NBC News and in a new article by Alan Boyle – here
The layered sediments in Mount Sharp could unveil the geologic history of Mars stretching back billions of years and reveal why the planet transitioned from an ancient, wet period of flowing liquid water on the surface to the dry, desiccated era of today.
As Curiosity unstowed and raised the 7 foot long (2.1 m) arm and reached towards Mount Sharp, the mast mounted navigation cameras on her head snapped a series of black and white images that included the shadow of NASA’s newest Martian robot. The 6 wheeled, car-sized rover made a harrowing pinpoint touchdown barely 2 weeks ago.
The arm is critical to the success of the mission because it will be used to maneuver a sophisticated turret, mounted at the arms terminus and laden with scientific instruments. It weighs a hefty 66 pounds (30 kg) and is about 2 feet in diameter. The turret includes a high resolution focusable color camera, a drill, an X-Ray spectrometer, a scoop and mechanisms for sieving and portioning samples of powdered rock and soil.
“We continue to hit home runs. We unstowed the robotic arm and took a look at the tools on the end of the arm,” said Curiosity Mission Manager Michael Watkins of NASA’s Jet Propulsion Lab (JPL) at a news briefing on Tuesday, Aug. 21. “It’s kind of a Swiss army knife there where we have a lot of instruments. We wanted to make sure all of that was working by doing these first motor checks. All of that went successfully.”
Watkins said the team was thrilled to finally see images of the arm deployed on Mars after seeing thousands of engineering test images.
“We have looked at images thousands of times in our test environment and I always see the walls of the test lab there.Now to see the arm out there deployed with Mars out there in the background is just a great feeling.”
The next step is more tests to confirm the arms utility and movements and calibrate the instruments . “We will fully check out the arm, drill and processing unit,” said Louise Jandura of JPL, sample system chief engineer for Curiosity, at the briefing. “The arm has already performed all these motions on Earth, but in a different gravity condition and that gravity does matter. Our turret at the end of the arm weighs as much as a small child and the differences in gravity change the amount of sag at the end of the arm. We want to be able to fine tune these end-point positions. So it will take some time to put the arm through all its paces.”
What’s more is that Curiosity is wiggling her wheels and is all set to make her first martian test drive on Wednesday.
“Late tonight, we plan to send Curiosity the commands for doing our first drive tomorrow,” said Watkins. “Curiosity will drive about 10 feet, turn right and then back up so her rear wheels will wind up about where her front wheels are now. The cameras will photograph the tracks and evaluate the performance of Curiosity driving ability and the softness of the surface soil.”
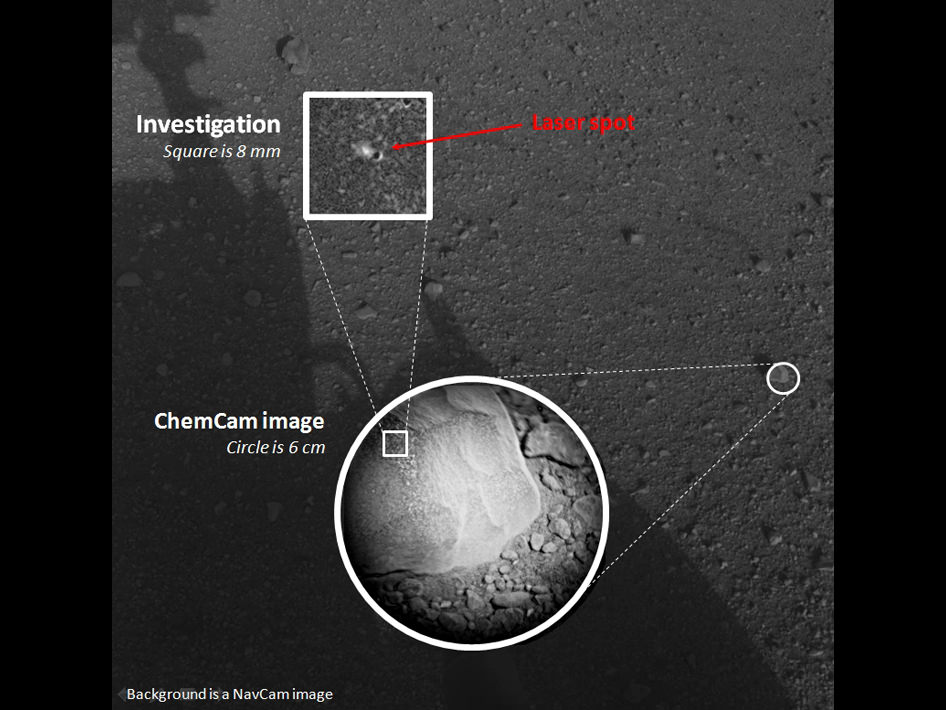
The 1 ton mega robot is also equipped with the DAN (Dynamic Albedo of Neutrons) instrument provided by Russia to check for water bound into minerals as hydrates in the top three feet (one meter) of soil beneath the rover.
“Curiosity has begun shooting neutrons into the ground,” said Igor Mitrofanov of Space Research Institute, Moscow, principal investigator for DAN. “We measure the amount of hydrogen in the soil by observing how the neutrons are scattered, and hydrogen on Mars is an indicator of water.”
The mission goal is to ascertain whether the Red Planet was ever capable of supporting microbial life, past or present and to search for the signs of life in the form of organic molecules during the 2 year primary mission phase.

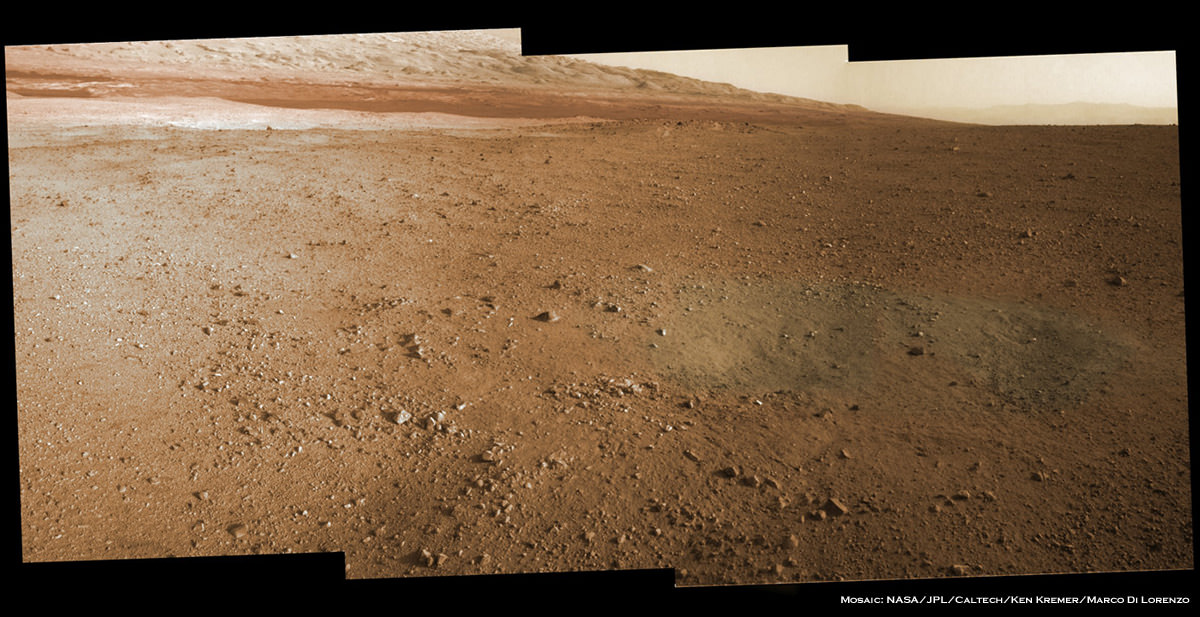
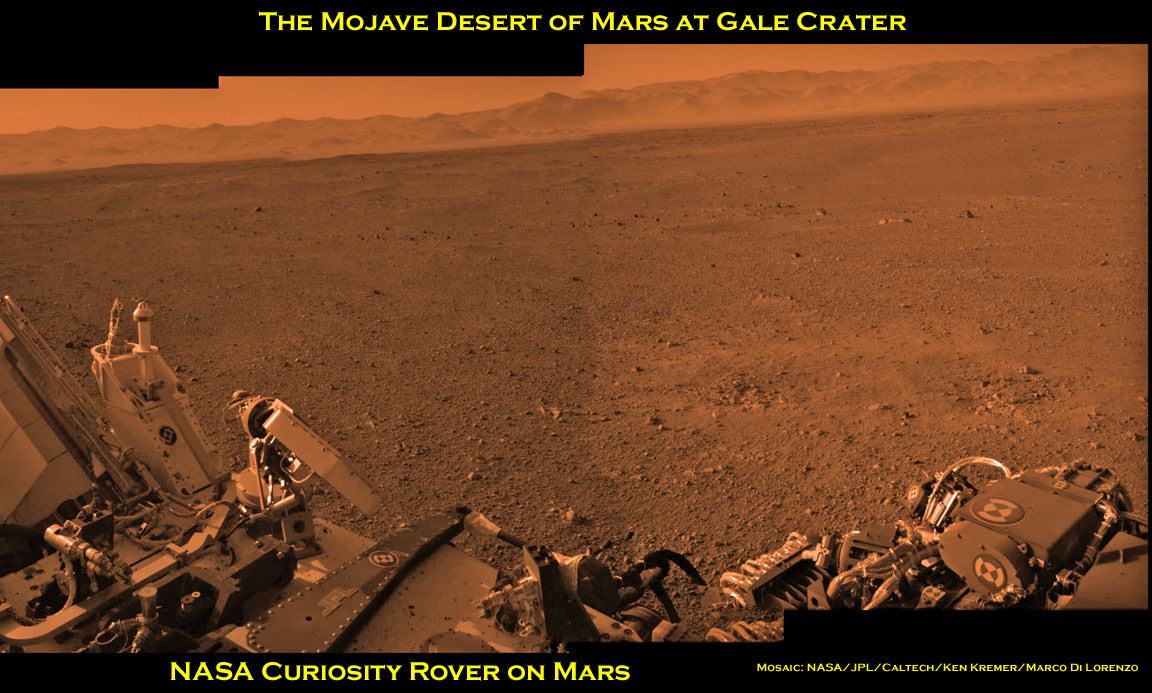
Image Caption: Panoramic Vista of Mount Sharp (at right) and Gale Crater from NASA’s Curiosity rover on Mars. Curiosity will eventually climb 3.4 mile high Mount Sharp in search of hydrated minerals. This colorized panoramic mosaic shows was assembled from new navigation camera (Navcam) images snapped by Curiosity on Sol 2 and Sol 12 and colorized based on Mastcam imagery from Curiosity. Image stitching and processing by Ken Kremer and Marco Di Lorenzo. See black and white version below. Credit: NASA/JPL-Caltech/Ken Kremer/Marco Di Lorenzo Lorenzo – www.kenkremer.com