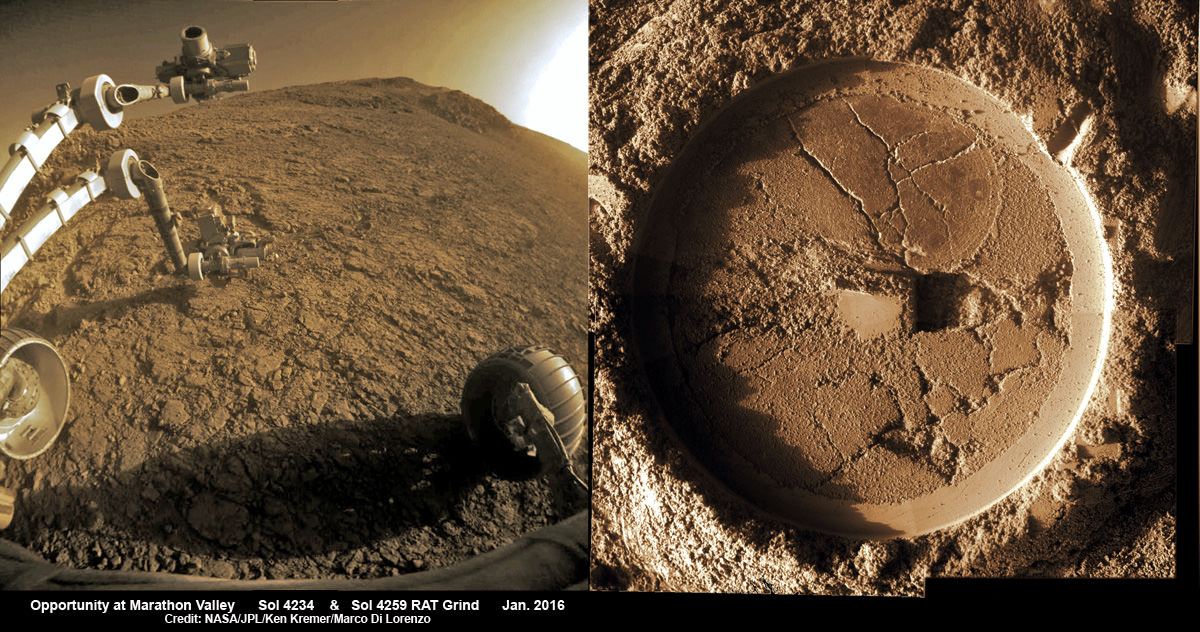
Composite hazcam camera image (left) shows the robotic arm in motion as NASA’s Mars Exploration Rover Opportunity places the tool turret on the target named “Private John Potts” on Sol 4234 to brush away obscuring dust. Rover is actively working on the southern side of “Marathon Valley” which slices through western rim of Endeavour Crater. On Sol 4259 (Jan. 16, 2016), Opportunity completed grinds with the Rock Abrasion Tool (RAT) to exposure rock interior for elemental analysis, as seen in mosaic (right) of four up close images taken by Microscopic Imager (MI). Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Composite hazcam camera image (left) shows the robotic arm in motion as NASA’s Mars Exploration Rover Opportunity places the tool turret on the target named “Private John Potts” on Sol 4234 to brush away obscuring dust. Rover is actively working on the southern side of “Marathon Valley” which slices through western rim of Endeavour Crater. On Sol 4259 (Jan. 16, 2016), Opportunity completed grinds with the Rock Abrasion Tool (RAT) to exposure rock interior for elemental analysis, as seen in mosaic (right) of four up close images taken by Microscopic Imager (MI). Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
NASA’s world famous Mars Exploration RoverOpportunity continues blazing a daily trail of unprecedented science first’s, still swinging her robotic arm robustly into action at a Martian “Mining Zone” on the 12th anniversary of her hair-raising Red Planet touchdown this week, a top rover scientist told Universe Today.
The SpaceX Falcon 9 rocket is seen as it launches from Vandenberg Air Force Base Space Launch Complex 4 East with the Jason-3 spacecraft onboard, , Sunday, Jan. 17, 2016, Vandenberg Air Force Base, California. Jason-3, an international mission led by the National Oceanic and Atmospheric Administration (NOAA), will help continue U.S.-European satellite measurements of global ocean height changes. Photo Credit: (NASA/Bill Ingalls)
The SpaceX Falcon 9 rocket is seen as it launches from Vandenberg Air Force Base Space Launch Complex 4 East with the Jason-3 spacecraft onboard, Sunday, Jan. 17, 2016, Vandenberg Air Force Base, California. Jason-3, an international mission led by the National Oceanic and Atmospheric Administration (NOAA), will help continue U.S.-European satellite measurements of global ocean height changes. Photo Credit: (NASA/Bill Ingalls)
The weather forecast is outstanding! And you can watch all the excitement live!
The primary goal is to deliver Jason-3 to low Earth orbit, where it will gather global measurements of ocean topography, or wave heights, using radar altimitry. These data provide scientists with essential information about global and regional changes in the Earth’s seas such as tracking sea level rise that threatens the resilience of coastal communities and the health of our environment. Continue reading “SpaceX Launching NASA Jason-3 Ocean Surveillance Satellite Jan. 17; with Barge Rocket Landing – Watch Live”
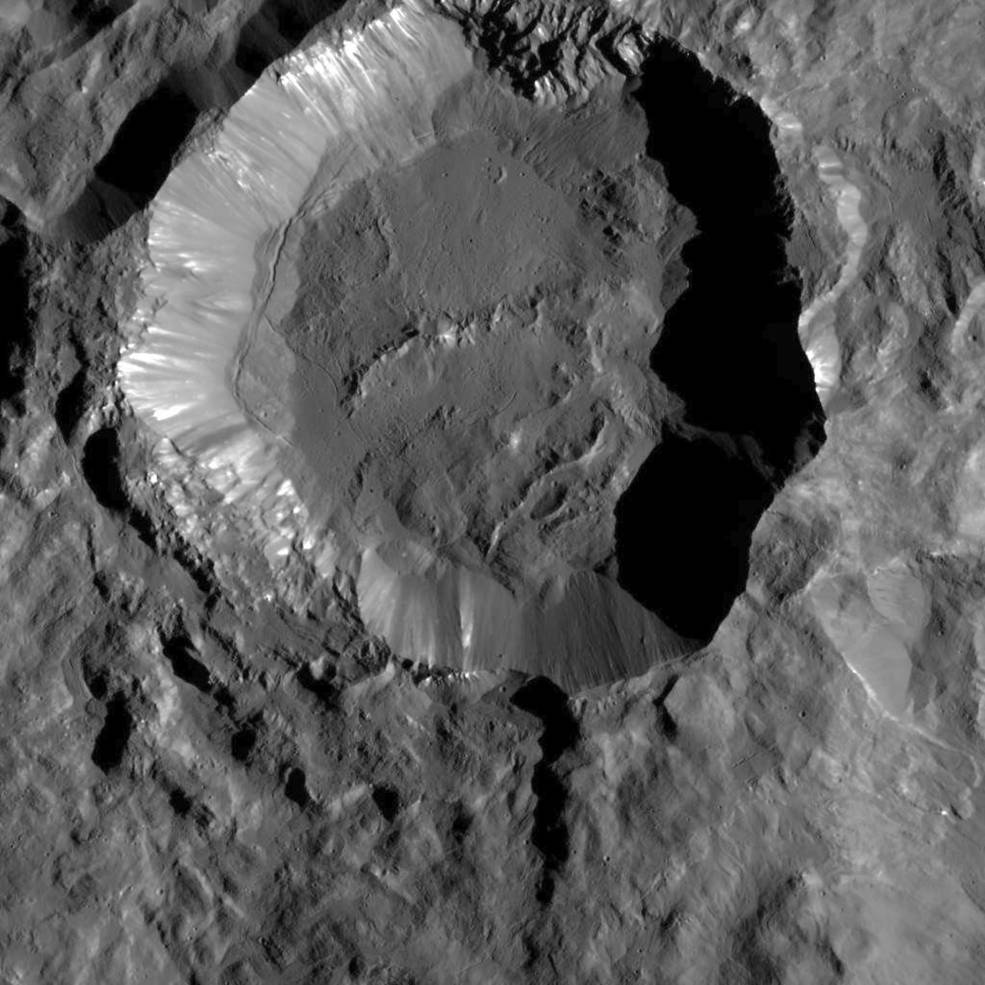
This image from NASA's Dawn spacecraft shows Kupalo Crater, one of the youngest craters on Ceres. The crater has bright material exposed on its rim and walls, which could be salts. Its flat floor likely formed from impact melt and debris. Credits: NASA/JPL-Caltech/UCLA/MPS/DLR/IDA
This image from NASA’s Dawn spacecraft shows Kupalo Crater, one of the youngest craters on Ceres. The crater has bright material exposed on its rim and walls, which could be salts. Its flat floor likely formed from impact melt and debris. Credits: NASA/JPL-Caltech/UCLA/MPS/DLR/IDA
NASA’s Dawn spacecraft has unveiled a new patch of intriguing bright features in the most recent series of striking close-up images taken just after the probe reached the lowest altitude it will ever reach during the mission.
From Dawn’s current altitude of 240 miles (385 kilometers) above Ceres, every image taken from now on of the “unique landforms” will be of the highest resolution attainable since the ship will never swoop down closer to the pockmarked surface for science. Continue reading “Dawn Unveils New Bright Features on Ceres in Striking Close-Ups”
Twelve Years Ago, Spirit Rover Lands on Mars. This mosaic image taken on Jan. 4, 2004, by the navigation camera on the Mars Exploration Rover Spirit, shows a 360 degree panoramic view of the rover on the surface of Mars. Spirit operated for more than six years after landing in January 2004 for what was planned as a three-month mission. Credit: NASA/JPL
Twelve Years Ago, Spirit Rover Lands on Mars . This mosaic image taken on Jan. 4, 2004, by the navigation camera on the Mars Exploration Rover Spirit, shows a 360 degree panoramic view of the rover on the surface of Mars. Spirit operated for more than six years after landing in January 2004 for what was planned as a three-month mission. Credit: NASA/JPL
Exactly 12 Years ago this week, NASA’s now famous Spirit rover touched down on the Red Planet, starting a spectacular years long campaign of then unimaginable science adventures that ended up revolutionizing our understanding of Mars due to her totally unexpected longevity.
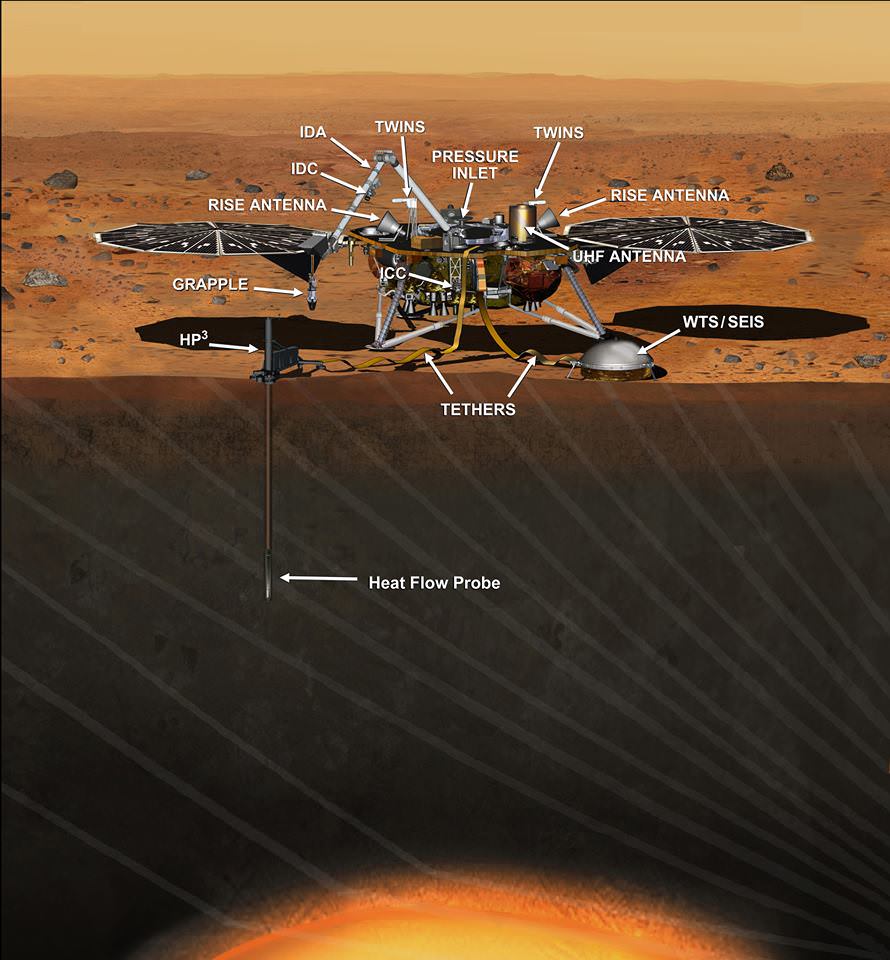
This artist's concept depicts the InSight lander on Mars after the lander's robotic arm has deployed a seismometer and a heat probe directly onto the ground. InSight is the first mission dedicated to investigating the deep interior of Mars. The findings will advance understanding of how all rocky planets, including Earth, formed and evolved. NASA approved a new launch date in May 2018. Credits: NASA/JPL-Caltech
NASA managers have just made the difficult but unavoidable decision to scrub the planned March 2016 launch of the InSight lander, the agency’s next mission to Mars, by at least two years because of a vacuum leak that was just detected in the probes flawed seismometer instrument which cannot be fixed in time.
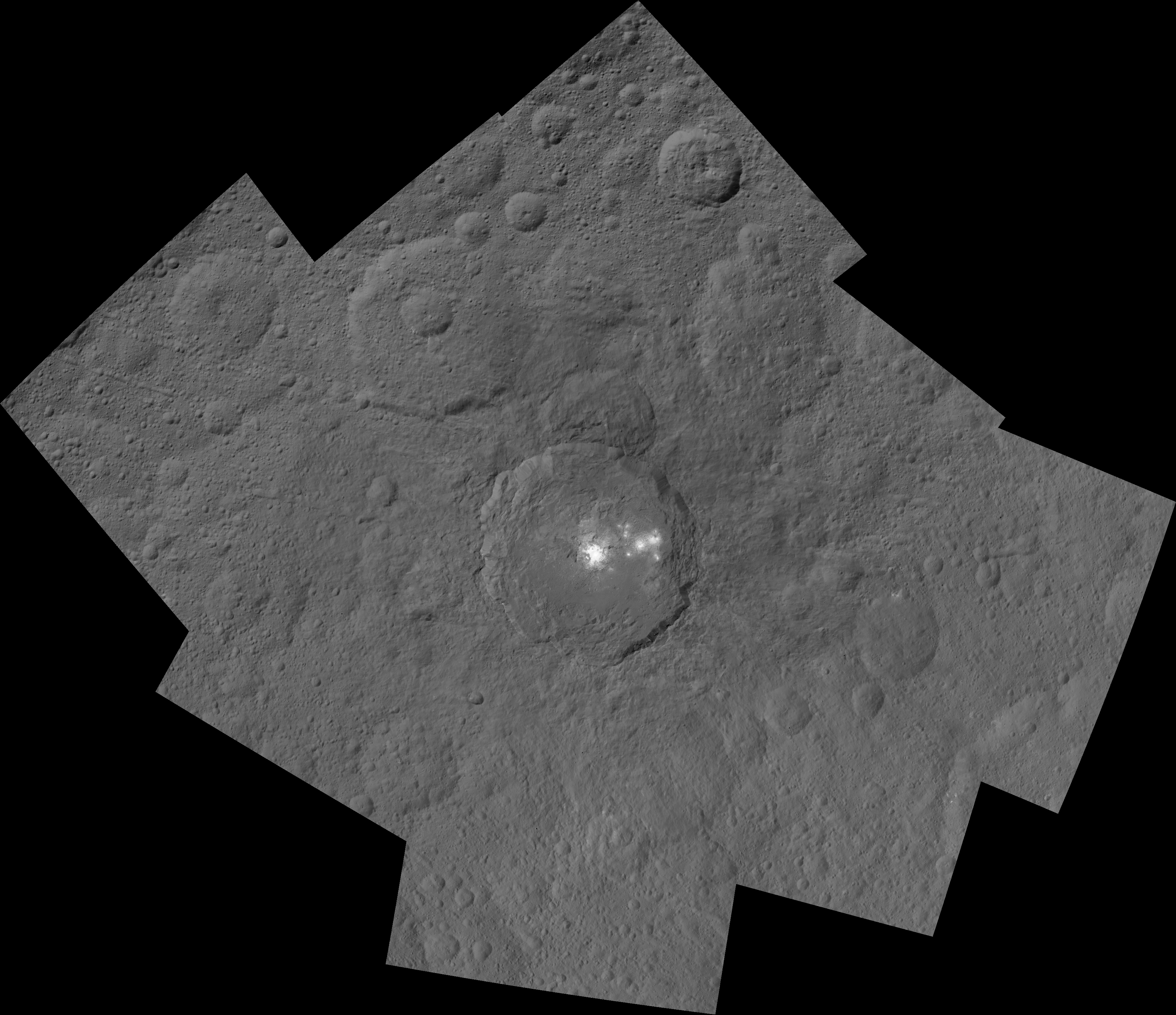
This mosaic shows Ceres' Occator crater and surrounding terrain from an altitude of 915 miles (1,470 kilometers), as seen by NASA's Dawn spacecraft. Occator is about 60 miles (90 kilometers) across and 2 miles (4 kilometers) deep. Credits: NASA/JPL-Caltech/UCLA/MPS/DLR/IDA
The most dazzling views ever seen of dwarf planet Ceres and its mysterious bright spots are what’s on tap by year’s end as NASA’s amazing Dawn spacecraft starts a gradual but steep descent over the next two months to its lowest and final orbit around the bizarre icy body.
Engineers at NASA’s Jet Propulsion Laboratory (JPL) successfully fired up the probes exotic ion propulsion system to begin lowering Dawn’s orbital altitude to less than a quarter of what it has been for the past two months of intense mapping operations.
On Oct. 23, Dawn began a seven-week-long dive that uses ion thruster #2 to reduce the spacecrafts vantage point from 915 miles (1,470 kilometers) at the High Altitude Mapping Orbit (HAMO) down to less than 235 miles (380 kilometers) above Ceres at the Low Altitude Mapping Orbit (LAMO).
Dawn is slated to arrive at LAMO by mid-December, just in time to begin delivering the long awaiting Christmas treats.
Ceres has absolutely tantalized researchers far beyond their wildest expectations.
When Dawn arrives at LAMO it will be the culmination of an eight year interplanetary voyage that began with a blastoff on September 27, 2007 by a United Launch Alliance (ULA) Delta II Heavy rocket from Space Launch Complex-17B (SLC-17B) at Cape Canaveral Air Force Station, Florida.
LAMO marks Dawn’s fourth, lowest and final science orbit at Ceres where the highest resolution observations will be gathered and images from the framing camera will achieve a resolution of 120 feet (35 meters) per pixel.
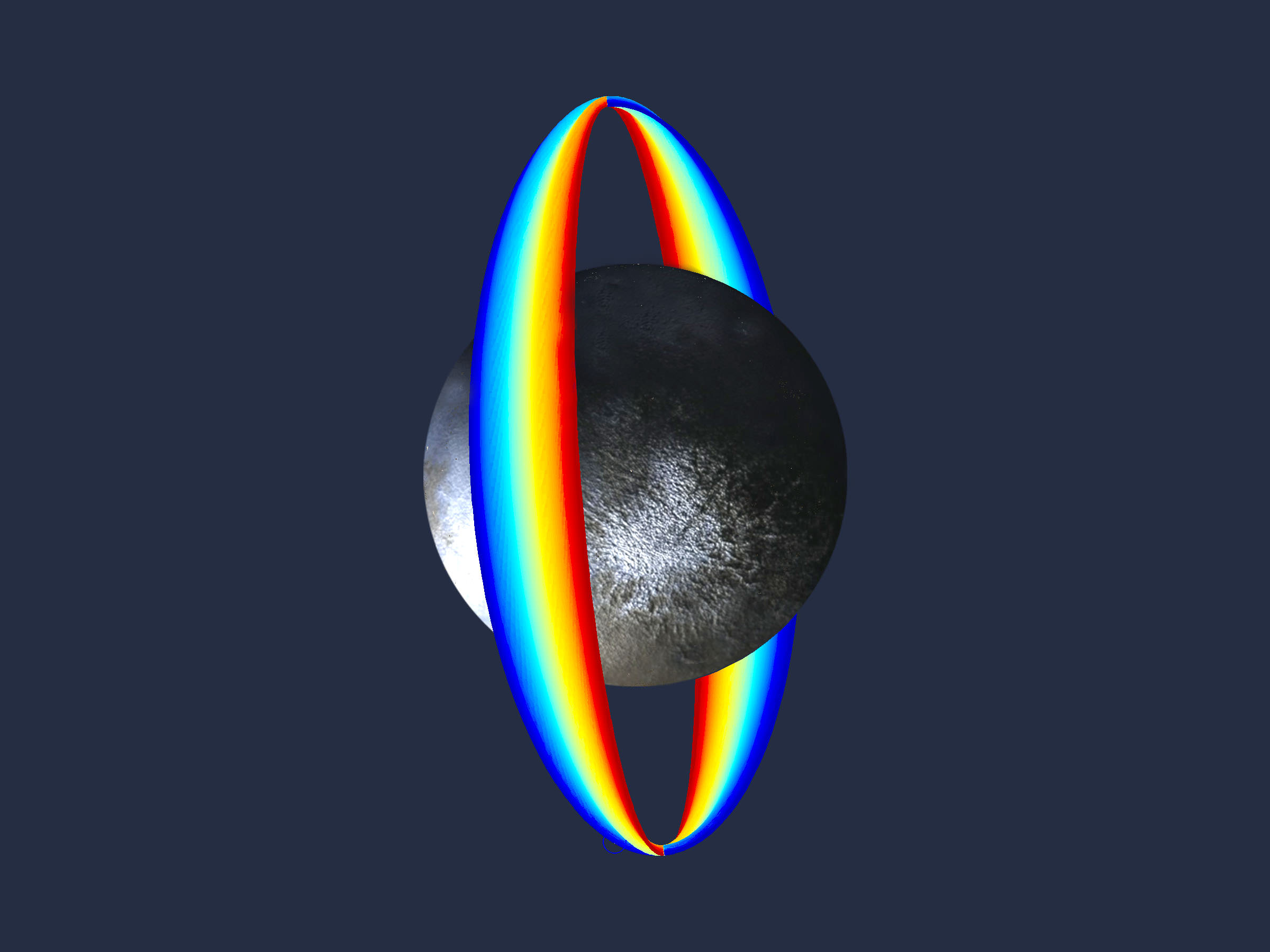
Dawn’s low altitude mapping orbit LAMO. This shows how the orbit naturally shifts slightly (relative to the sun) during the three months of LAMO, starting in blue and ending in red. The spacecraft completes each revolution in 5.5 hours, and Ceres rotates in 9.1 hours, so Dawn will be able to view the entire surface. Credit: NASA/JPL
At LAMO, researchers hope to finally resolve the enduring mystery of the nature of the bright spots that have intrigued science and the general public since they were first glimpsed clearly early this year as Dawn was on its final approach to Ceres.
Dawn arrived in orbit this past spring on March 6, 2015.
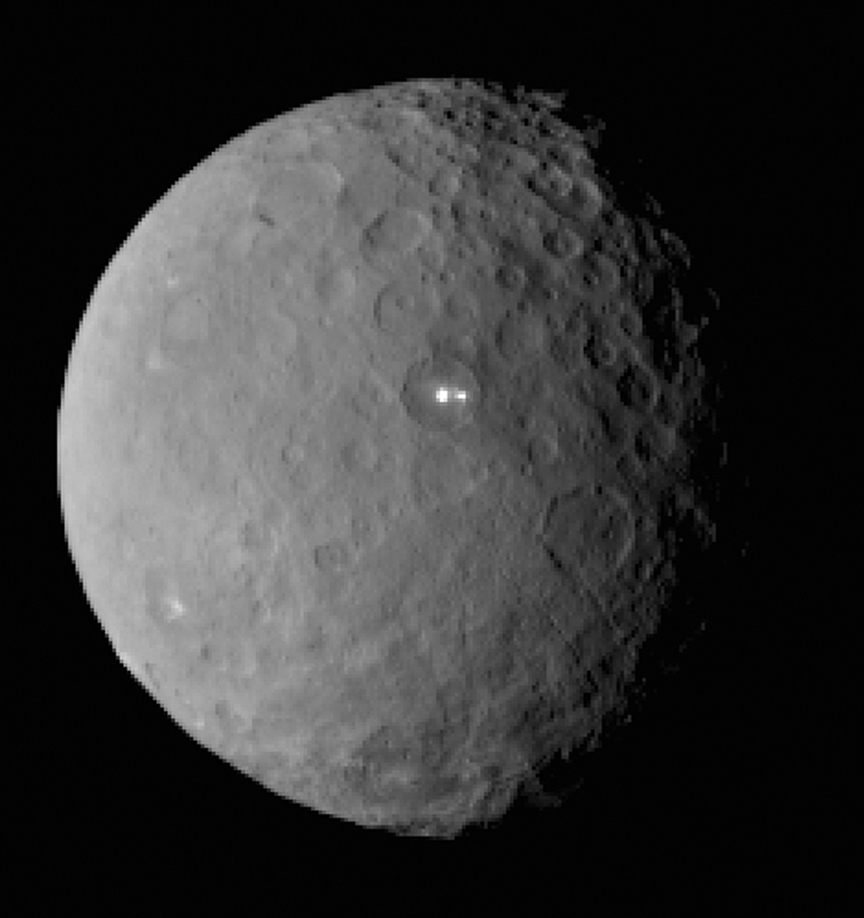
This image was taken by NASA’s Dawn spacecraft of dwarf planet Ceres on Feb. 19 from a distance of nearly 29,000 miles (46,000 km). It shows that the brightest spot on Ceres has a dimmer companion, which apparently lies in the same basin. See below for the wide view. Credit: NASA/JPL-Caltech/UCLA/MPS/DLR/IDA
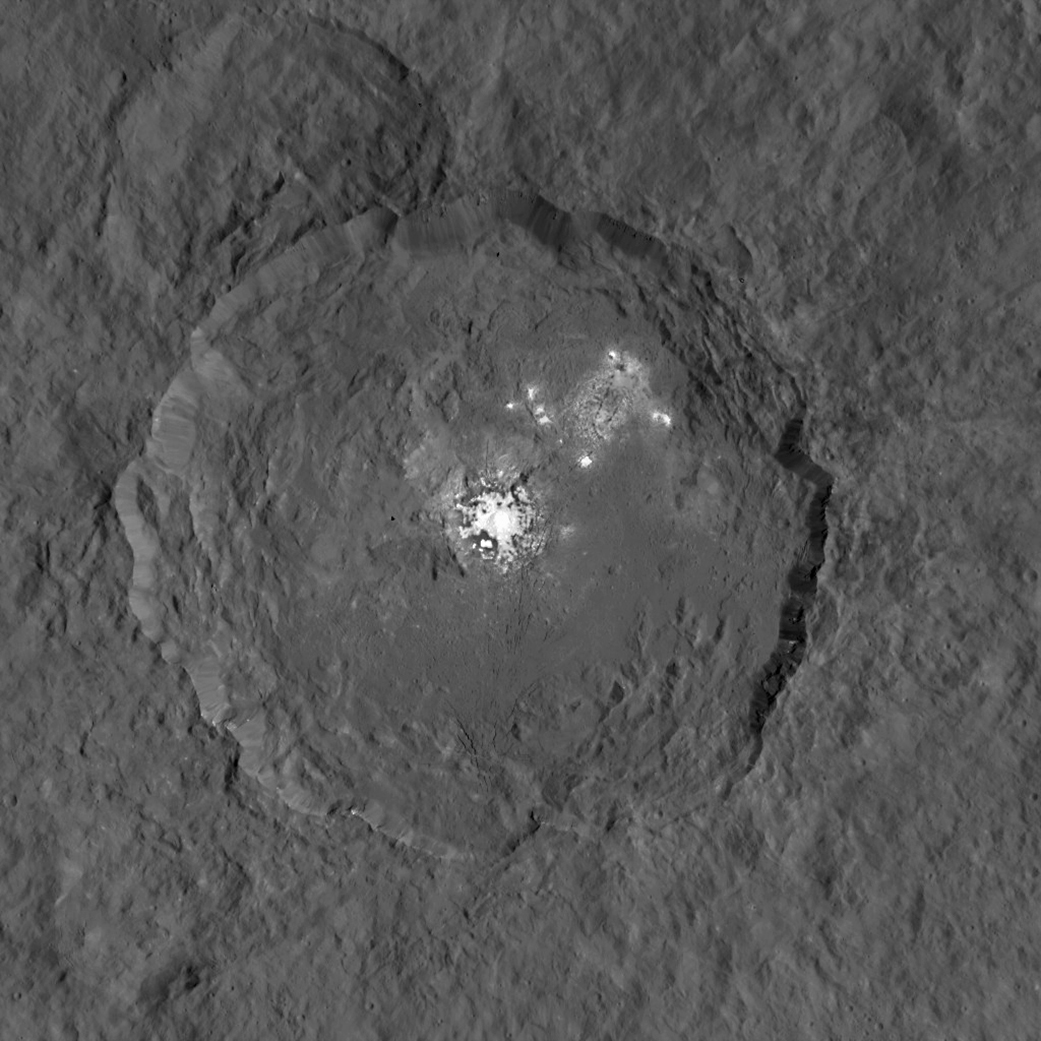
The science team has just released a new mosaic of the brightest spots on Ceres found at Occator crater and the surrounding terrain – see above.
The images were taken from the HAMO altitude of 915 miles (1,470 kilometers) during the first of six mapping cycles. They have a resolution of 450 feet (140 meters) per pixel.
Occator measures about 60 miles (90 kilometers) across and 2 miles (4 kilometers) deep.
This image, made using images taken by NASA’s Dawn spacecraft during the mission’s High Altitude Mapping Orbit (HAMO) phase, shows Occator crater on Ceres, home to a collection of intriguing bright spots. Credits: NASA/JPL-Caltech/UCLA/MPS/DLR/IDA
Because the spots are so bright they are generally overexposed. Therefore the team took two sets of images, with shorter and longer exposure times, to maximize the details of the interior of Occator.
“This view uses a composite of two images of Occator: one using a short exposure that captures the detail in the bright spots, and one where the background surface is captured at normal exposure.”
The bright spots at Occator crater remain the biggest Cerean mystery.
So far the imagery and other science data may point to evaporation of salty water from the interior as the source of the bright spots.
“Occasional water leakage on to the surface could leave salt there as the water would sublime,” Prof. Chris Russell, Dawn principal investigator told Universe Today exclusively.
“The big picture that is emerging is that Ceres fills a unique niche.”
“Ceres fills a unique niche between the cold icy bodies of the outer solar system, with their rock hard icy surfaces, and the water planets Mars and Earth that can support ice and water on their surfaces,” Russell, of the University of California, Los Angeles, told me.
Dawn has peeled back Ceres secrets as the spacecraft orbits lower and lower. Detailed measurements gathered to date have yielded global mineral and topographic maps from HAMO with the best resolution ever as the science team painstakingly stitched together the probes spectral and imaging products.
And the best is yet to come at LAMO.
At HAMO, Dawn’ instruments, including the Framing Camera and Visible and Infrared Spectrometer (VIR) were aimed at slightly different angles in each mapping cycle allowing the team to generate stereo views and construct 3-D maps.
“The emphasis during HAMO is to get good stereo data on the elevations of the surface topography and to get good high resolution clear and color data with the framing camera,” Russell explained.
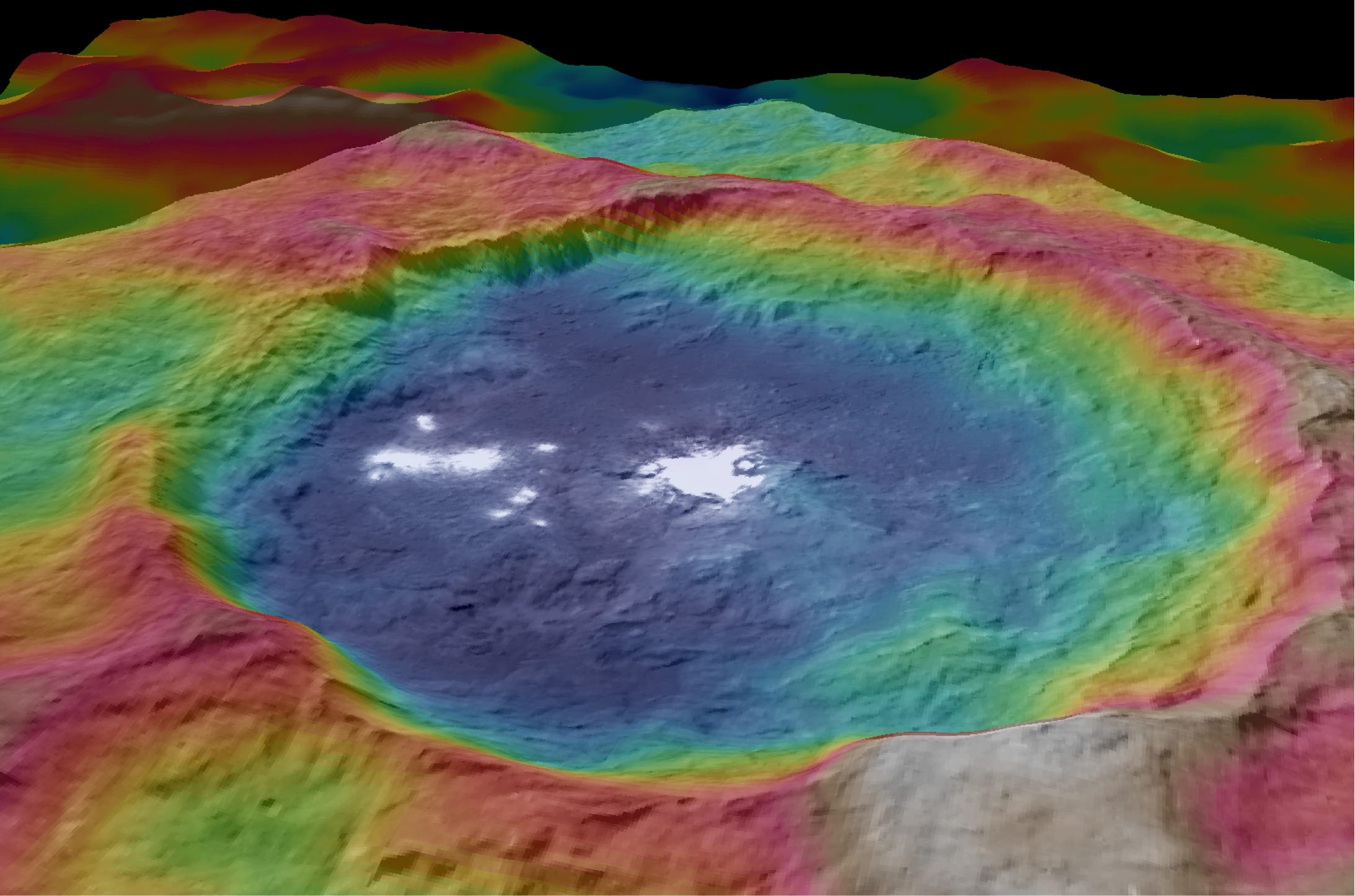
This view from NASA’s Dawn spacecraft is a color-coded topographic map of Occator crater on Ceres. Blue is the lowest elevation, and brown is the highest. The crater, which is home to the brightest spots on Ceres, is approximately 56 miles (90 kilometers wide). Credits: NASA/JPL-Caltech/UCLA/MPS/DLR/IDA
Dawn is Earth’s first probe in human history to explore any dwarf planet, the first to explore Ceres up close and the first to orbit two celestial bodies.
The asteroid Vesta was Dawn’s first orbital target where it conducted extensive observations of the bizarre world for over a year in 2011 and 2012.
Ceres is a Texas-sized world, ranks as the largest object in the main asteroid belt between Mars and Jupiter, and may have a subsurface ocean of liquid water that could be hospitable to life.
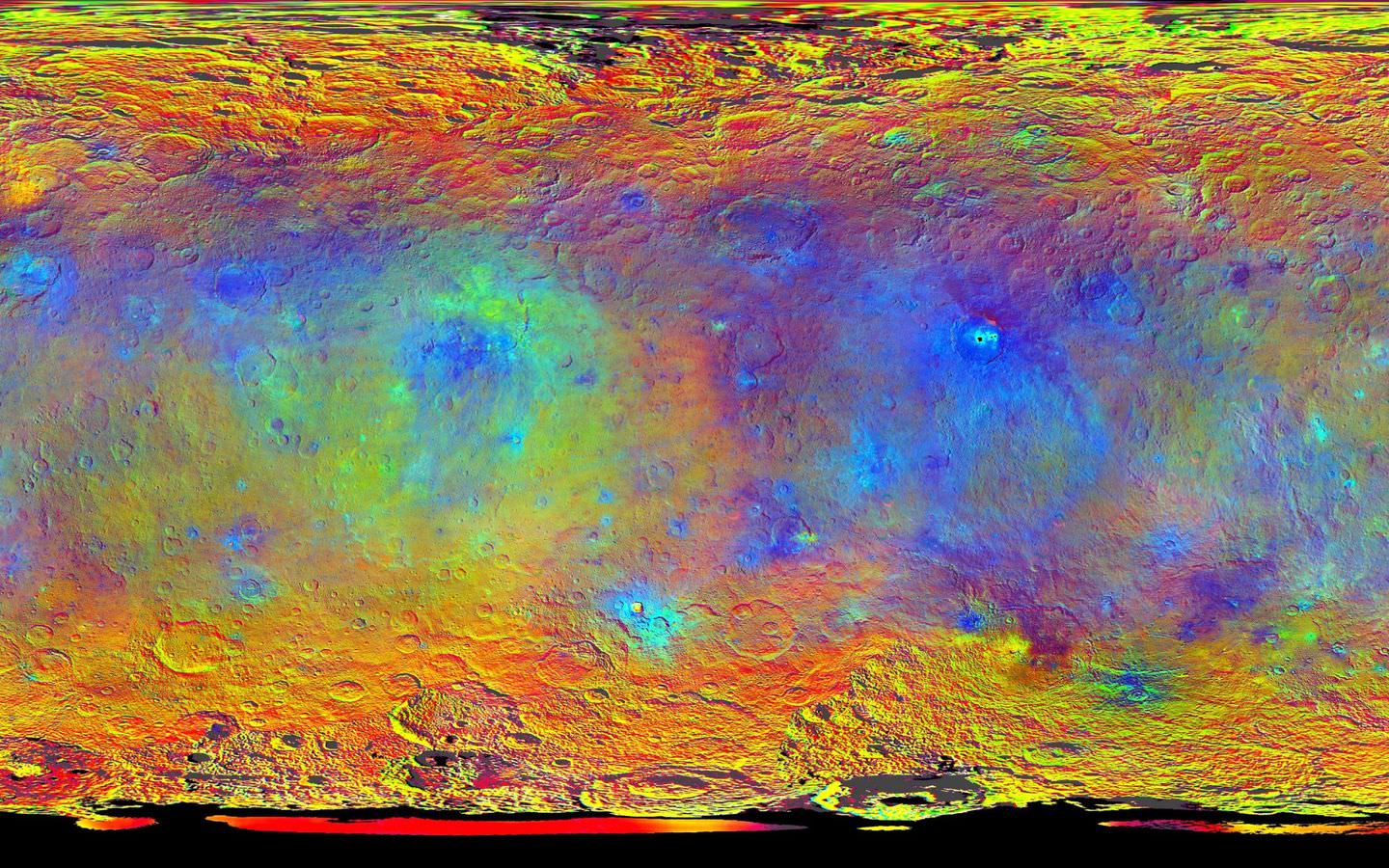
This map-projected view of Ceres was created from images taken by NASA’s Dawn spacecraft during its high-altitude mapping orbit, in August and September, 2015. This color coded map can provide valuable insights into the mineral composition of the surface, as well as the relative ages of surface features. Credits: NASA/JPL-Caltech/UCLA/MPS/DLR/IDA
The mission is expected to last until at least March 2016, and possibly longer, depending upon fuel reserves.
“It will end some time between March and December,” Dr. Marc Rayman, Dawn’s chief engineer and mission director based at NASA’s Jet Propulsion Laboratory, Pasadena, California, told Universe Today.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
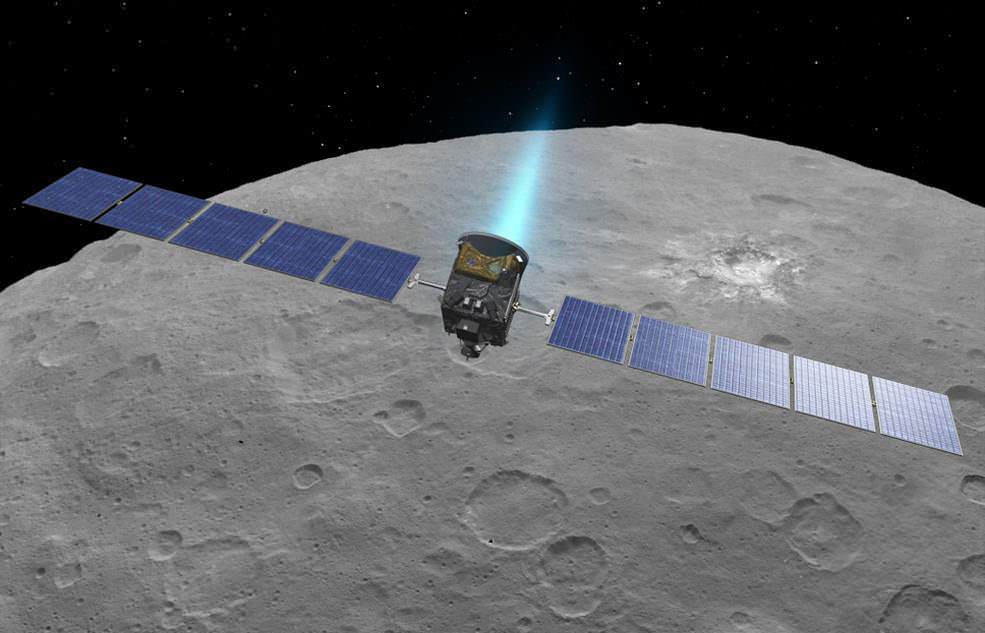
An artist’s conception shows NASA’s Dawn spacecraft flying above Ceres. This view incorporates actual imagery from the Dawn mission. Credit: NASA/JPL-Caltech/UCLA/MPS/DLR/IDA
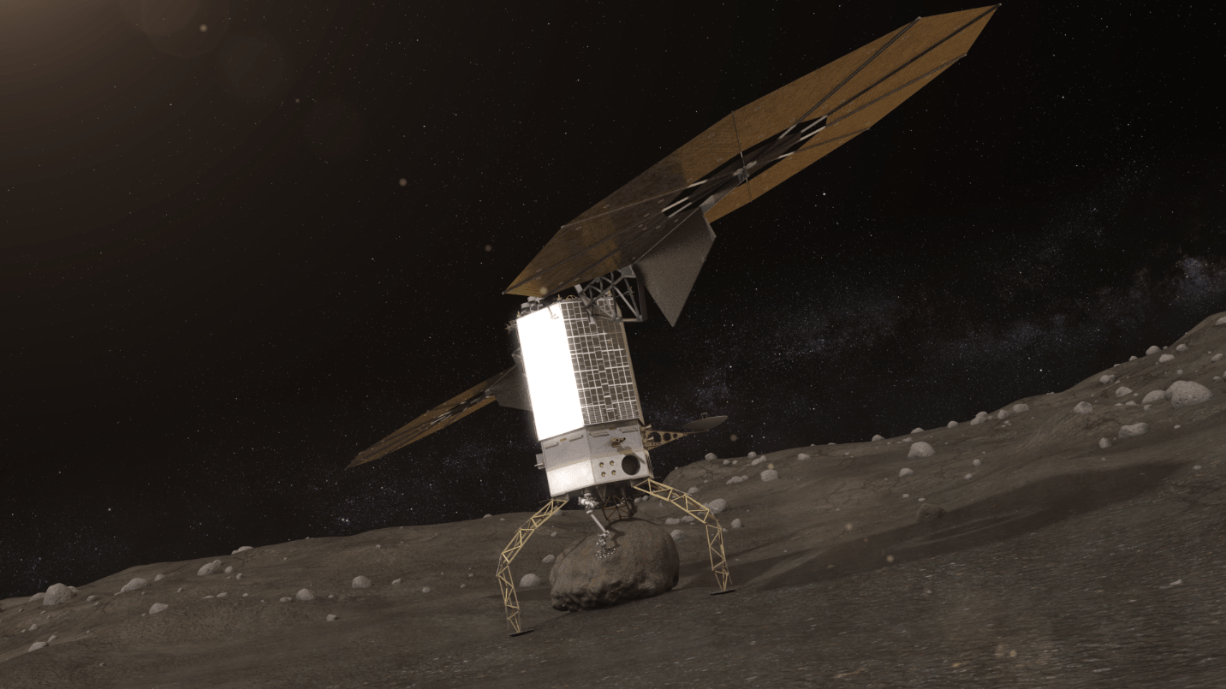
Robotic sampling arm and capture mechanism to collect a multi-ton boulder from an asteroid are under development at NASA Goddard and other agency centers for NASA’s unmanned Asteroid Redirect Vehicle and eventual docking in lunar orbit with Orion crew vehicle by the mid 2020s. Credit: Ken Kremer/kenkremer.com
NASA GODDARD SPACE FLIGHT CENTER, MD – Rigorous testing has begun on the advanced robotic arm and boulder extraction mechanisms that are key components of the unmanned probe at the heart of NASA’s Asteroid Redirect Robotic Mission (ARRM) now under development to pluck a multi-ton boulder off a near-Earth asteroid so that astronauts visiting later in an Orion crew capsule can harvest a large quantity of samples for high powered scientific analysis back on Earth. Universe Today inspected the robotic arm hardware utilizing “leveraged robotic technology” during an up close visit and exclusive interview with the engineering development team at NASA Goddard.
“The teams are making great progress on the capture mechanism that has been delivered to the robotics team at Goddard from Langley,” NASA Associate Administrator Robert Lightfoot told Universe Today.
“NASA is developing these common technologies for a suite of missions like satellite servicing and refueling in low Earth orbit as well as autonomously capturing an asteroid about 100 million miles away,” said Ben Reed, NASA Satellite Servicing Capabilities Office (SSCO) Deputy Project Manager, during an exclusive interview and hardware tour with Universe Today at NASA Goddard in Greenbelt, Maryland, regarding concepts and goals for the overall Asteroid Redirect Mission (ARM) initiative.
NASA is leveraging technology originally developed for satellite servicing such as with the Robotic Refueling Mission (RRM) currently on board the International Space Station(ISS) and repurposing them for the asteroid retrieval mission.
“Those are our two near term mission objectives that we are developing these technologies for,” Reed explained.
The unmanned Asteroid Redirect Robotic Mission (ARRM) to grab a boulder is the essential first step towards carrying out the follow on sample retrieval with the manned Orion Asteroid Redirect Mission (ARM) by the mid-2020s.
ARRM will use a pair of highly capable robotic arms to autonomously grapple a multi-ton (> 20 ton) boulder off the surface of a large near-Earth asteroid and transport it to a stable, astronaut accessible orbit around the Moon in cislunar space.
“Things are moving well. The teams have made really tremendous progress on the robotic arm and capture mechanism,” Bill Gerstenmaier, NASA Associate Administrator for Human Exploration and Operations, told Universe Today.
Then an Orion crew capsule can fly to it and the astronauts will collect a large quantity of rock samples and gather additional scientific measurements.
“We are working on a system to rendezvous, capture and service different [target] clients using the same technologies. That is what we are working on in a nut shell,” Reed said.
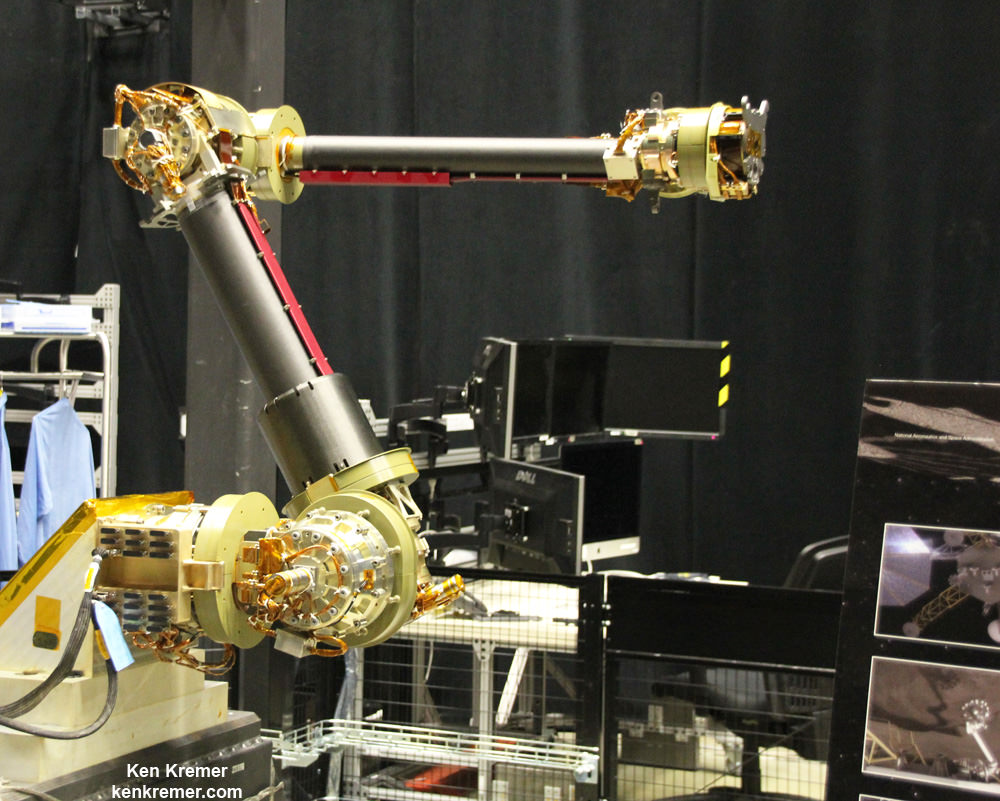
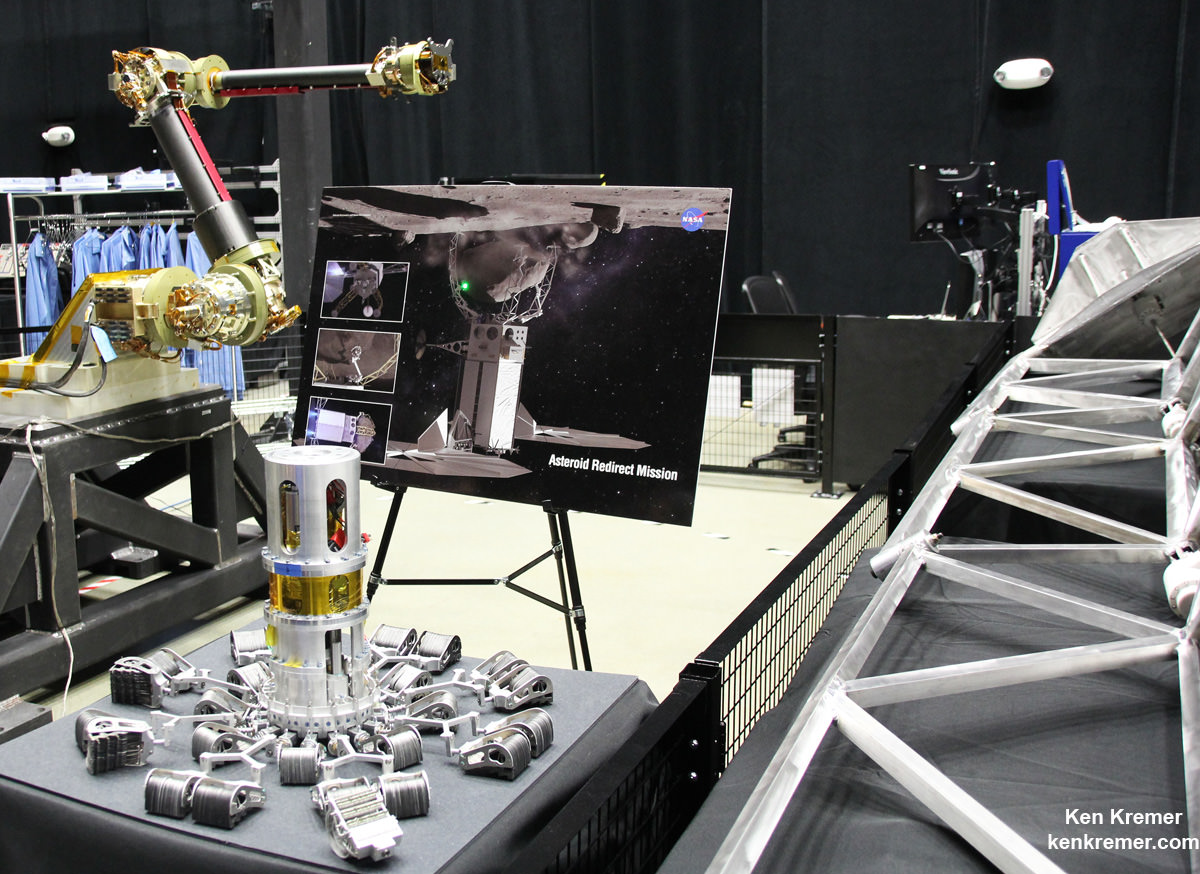
This engineering design unit of the robotic servicing arm is under development to autonomously extract a boulder off an asteroid for NASA’s asteroid retrieval mission and is being tested at NASA Goddard. It has seven degrees of freedom and mimics a human arm. Credit: Ken Kremer/kenkremer.com
“Right now the plan is to launch ARRM by about December 2020,” Reed told me. But a huge amount of preparatory work across the US is required to turn NASA’s plan into reality.
Key mission enabling technologies are being tested right now with a new full scale engineering model of the ‘Robotic Servicing Arm’ and a full scale mockup of the boulder snatching ARRM Capture Module at NASA Goddard, in a new facility known as “The Cauldron.”
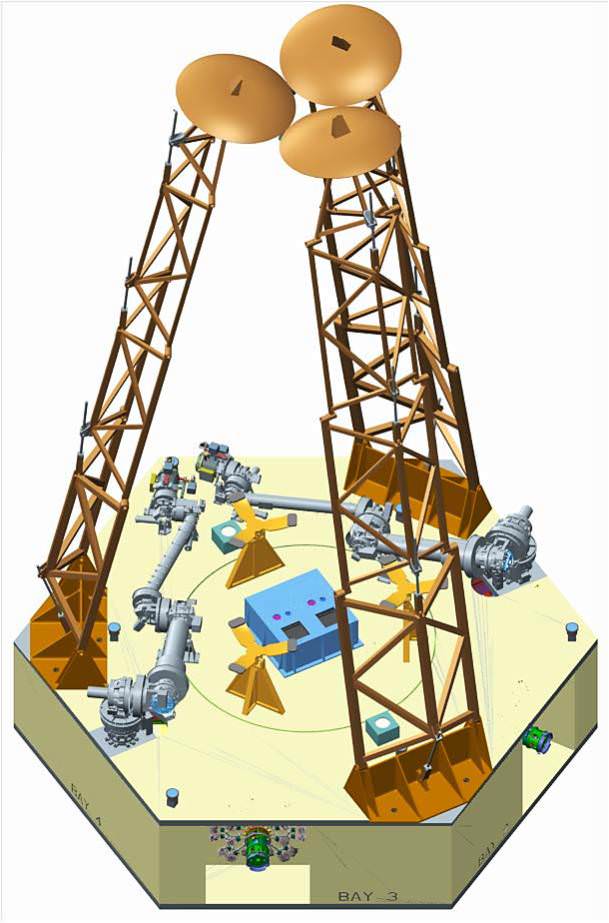
Capture Module comprising two robotic servicing arms and three boulder grappling contact and restraint system legs for NASA’s Asteroid Redirect Robotic Mission (ARRM). Credit: NASAThe ARRM capture module is comprised of two shorter robotic arms (separated by 180 degrees) and three lengthy contact and restraint system capture legs (separated by 120 degrees) attached to a cradle with associated avionics, computers and electronics and the rest of the spacecraft and solar electric power arrays.
“The robotic arm we have here now is an engineering development unit. The 2.2 meter-long arms can be used for assembling large telescopes, repairing a failed satellite, removing orbital debris and capturing an asteroid,” said Reed.
“There are two little arms and three big capture legs.”
“So, we are leveraging one technology development program into multiple NASA objectives.”
“We are working on common technologies that can service a legacy orbiting satellite, not designed to be serviced, and use those same technologies with some tweaking that we can go out with 100 million miles and capture an asteroid and bring it back to the vicinity of the Moon.”
“Currently the [capture module] system can handle a boulder that’s up to about 3 x 4 x 5 meters in diameter.”
Artists concept of NASA’s Asteroid Redirect Robotic Mission capturing an asteroid boulder before redirecting it to a astronaut-accessible orbit around Earth’s moon. Credits: NASA
The Cauldron is a brand new Goddard facility for testing technologies and operations for multiple exploration and science missions, including satellite servicing and ARRM that just opened in June 2015 for the centers Satellite Servicing Capabilities Office.
Overall project lead for ARRM is the Jet Propulsion Laboratory (JPL) with numerous contributions from other NASA centers and industrial partners.
“This is an immersive development lab where we bring systems together and can do lifetime testing to simulate what’s in space. This is our robotic equivalent to the astronauts NBL, or neutral buoyancy lab,” Reed elaborated.
“So with this same robotic arm that can cut wires and thermal blankets and refuel an Earth sensing satellite, we can now have that same arm go out on a different mission and be able to travel out and pick up a multi-ton boulder and bring it back for astronauts to harvest samples from.”
“So that’s quite a technical feat!”
The Robotic Servicing Arm is a multi-jointed powerhouse designed to function like a “human arm” as much as possible. It builds on extensive prior research and development investment efforts conducted for NASA’s current Red Planetrovers and a flight-qualified robotic arm developed for the Defense Advanced Research Projects Agency (DARPA).
“The arm is capable of seven-degrees-of-freedom to mimic the full functionally of a human arm. It has heritage from the arm on Mars right now on Curiosity as well as ground based programs from DARPA,” Reed told me.
“It has three degrees of freedom at our shoulder, two at our elbow and two more at the wrist. So I can hold the hand still and move the elbow.”
The arm will also be equipped with a variety of interchangeable “hands” that are basically tools to carry out different tasks with the asteroid such as grappling, drilling, sample gathering, imaging and spectrometric analysis, etc.
View of the robotic arm above and gripper tool below that initially grabs the asteroid boulder before the capture legs wrap around as planned for NASA’s upcoming unmanned ARRM Asteroid Redirect Robotic Mission that will later dock with an Orion crew vehicle. Credit: Ken Kremer/kenkremer.com
The ARRM spacecraft will carefully study, characterize and photograph the asteroid in great detail for about a month before attempting the boulder capture.
Why does the arm need all this human-like capability?
“When we arrive at an asteroid that’s 100 million miles away, we are not going to know the fine local geometry until we arrive,” Reed explained to Universe Today.
“Therefore we need a flexible enough arm that can accommodate local geometries at the multi-foot scale. And then a gripper tool that can handle those geometry facets at a much smaller scale.”
“Therefore we chose seven-degrees-of-freedom to mimic humans very much by design. We also need seven-degrees-of-freedom to conduct collision avoidance maneuvers. You can’t do that with a six-degree-of-freedom arm. It has to be seven to be a general purpose arm.”
How will the ARRM capture module work to snatch the boulder off the asteroid?
“So the idea is you come to the mother asteroid and touch down and make contact on the surface. Then you hold that position and the two arms reach out and grab the boulder.”
“Once its grabbed the boulder, then the legs straighten and pull the boulder off the surface.”
“Then the arms nestle the asteroid onto a cradle. And the legs then change from a contact system to become a restraint system. So the legs wrap around the boulder to restrain it for the 100 million mile journey back home.
“After that the little arms can let go – because the legs have wrapped around and are holding the asteroid.”
“So now the arm can also let go of the gripper system and pick up a different tool to do other things. For example they can collect a sample with another tool. And maybe assist an astronaut after the crew arrives.”
“During the 100 million mile journey back to lunar orbit they can be also be preparing the surface and cutting into it for later sample collection by the astronauts.”
Be sure to watch this video animation:
Since the actual asteroid encounter will occur very far away, the boulder grappling will have to be done fully autonomously since there will be no possibility for real time communications.
“The return time for communications is like about 30 minutes. So ‘human in the loop’ control is out of the question.
“Once we get into hover position over the landing site we hit the GO button. Then it will be very much like at Mars and the seven minutes of terror. It will take awhile to find out if it worked.”
Therefore the team at Goddard has already spent years of effort and practice sessions just to get ready for working with the early engineering version of the arm to maximize the probability of a successful capture.
“In this facility we put systems together to try and practice and rehearse and simulate as much of the mission as is realistically possible.”
“It took a lot of effort to get to this point, in the neighborhood of four years to get the simulation to behave correctly in real time with contact dynamics and the robotic systems. So the arm has to touch the boulder with force torque sensors and feed that into a computer to measure that and move the actuators to respond accordingly.”
“So the capture of the boulder is autonomous. The rest is teleoperated from the ground, but not the capture itself.”
How realistic are the rehearsals?
“We are practicing here by reaching out with the arm to grasp the client target using autonomous capture [procedures]. In space the client [target] is floating and maybe tumbling. So when we reach out with the arm to practice autonomous capture we make the client tumble and move – with the inertial properties of the target we are practicing on.”
“Now for known objects like satellites we know the mass precisely. And we can program all that inertial property data in very accurately to give us much more realistic simulations.”
“We learned from all our astronaut servicing experiences in orbit is that the more we know for the simulations, the easier and better the results are for the astronauts during an actual mission because you simulated all the properties.”
“But with this robotic mission to an asteroid there is no backup like astronauts. So we want to practice here at Goddard and simulate the space environment.”
ARRM will launch by the end of 2020 on either an SLS, Delta IV Heavy or a Falcon Heavy. NASA has not yet chosen the launch vehicle.
Several candidate asteroids have already been discovered and NASA has an extensive ongoing program to find more.
Orion crew capsule docks to NASA’s asteroid redirect vehicle grappling captured asteroid boulder orbiting the Moon. Credit: NASA
Again, this robotic technology was selected for development for ARRM because it has a lot in common with other objectives like fixing communications satellites, refueling satellites and building large telescopes in the future.
NASA is also developing other critical enabling technologies for the entire ARM project like solar electric propulsion that will be the subject of another article.
Therefore NASA is leveraging one technology development program into multiple spaceflight objectives that will greatly assist its plans to send ‘Humans to Mars’ in the 2030s with the Orion crew module launched by the monster Space Launch System (SLS) rocket.
The maiden uncrewed launch of the Orion/SLS stack is slated for November 2018.
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
At NASA Goddard robotics lab Ben Reed/NASA Satellite Servicing Capabilities Office (SSCO) Deputy Project Manager and Ken Kremer/Universe Today discuss the robotic servicing arm and asteroid boulder capture mechanism being tested for NASA’s upcoming unmanned ARRM Asteroid Redirect Robotic Mission that will dock with an Orion crew vehicle in lunar orbit by the mid 2020s for sample return collection. Credit: Ken Kremer/kenkremer.com
Panoramic view from NASA’s Opportunity rover looking down the floor of Marathon Valley and out to the vast expense of Endeavour Crater. Marathon Valley holds significant deposits of water altered clay minerals. This composite photo mosaic shows the rover’s robotic arm reaching out at left to investigate Martian rocks holding clues to the planets watery past, and robot shadow and wheel tracks visible at right. The mosaic combines a flattened fisheye hazcam image at left with a trio of navcam camera images taken on Sol 4144 (Sept. 20, 2015) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
As NASA’s Opportunity rover approaches the 12th anniversary of landing on Mars, her greatest science discoveries yet are likely within grasp in the coming months since she has successfully entered Marathon Valley from atop a Martian mountain and is now prospecting downhill for outcrops of water altered clay minerals.
The valley is the gateway to alien terrain holding significant caches of the water altered minerals that formed under environmental conditions conducive to support Martian microbial life forms, if they ever existed. But as anyone who’s ever climbed down a steep hill knows, you have to be extra careful not to slip and slide and break something, no matter how beautiful the view is – Because no one can hear you scream on Mars! See the downward looking valley view above.
After a years long Martian mountain climbing and mountain top exploratory trek, Opportunity entered a notch named Marathon Valley from atop a breathtakingly scenic ridge overlook atop the western rim of Endeavour Crater.
Marathon Valley measures about 300 yards or meters long and cuts downhill through the west rim of Endeavour crater from west to east. Endeavour crater spans some 22 kilometers (14 miles) in diameter.
See our photo mosaics illustrating Opportunity’s view around and about Marathon Valley and Endeavour Crater, created by the image processing team of Ken Kremer and Marco Di Lorenzo.
Our mosaic above affords a downward looking view from Marathon Valley on Sol 4144, Sept. 20. It uniquely combines raw images from the hazcam and navcam cameras to gain a wider perspective panoramic view of the steep walled valley, and also shows the rover at work stretching out the robotic arm to potential clay mineral rock targets at left. Opportunity’s shadow and wheel tracks are visible at right.
Mosaic view from Opportunity rover looking along the high walls and down the floor of Marathon Valley with deposits of water altered clay minerals and out to the vast expense of Endeavour Crater. This navcam camera photo mosaic was assembled from images taken on Sol 4159 (Oct. 5, 2015) and colorized. Credit: NASA/JPL/Cornell/Marco Di Lorenzo/Ken Kremer/kenkremer.com
In late July, Opportunity began the decent into the valley from the western edge and started investigating scientifically interesting rock targets by conducting a month’s long “walkabout” survey ahead of the upcoming frigid Martian winter – the seventh since touchdown at Meridiani Planum in January 2004.
The walkabout was done to identify targets of interest for follow up scrutiny in and near the valley floor. Opportunity’s big sister Curiosity conducted a similarly themed “walkabout” at the base of Mount Sharp near her landing site located on the opposite side of the Red Planet.
“The valley is somewhat like a chute directed into the crater floor, which is a long ways below. So it is somewhat scary, but also pretty interesting scenery,” writes Larry Crumpler, a science team member from the New Mexico Museum of Natural History & Science, in a mission update.
“Its named Marathon Valley because the rover traveled one marathon’s distance to reach it,” Prof. Ray Arvidson, the rover Deputy Principal Investigator of Washington University told Universe Today.
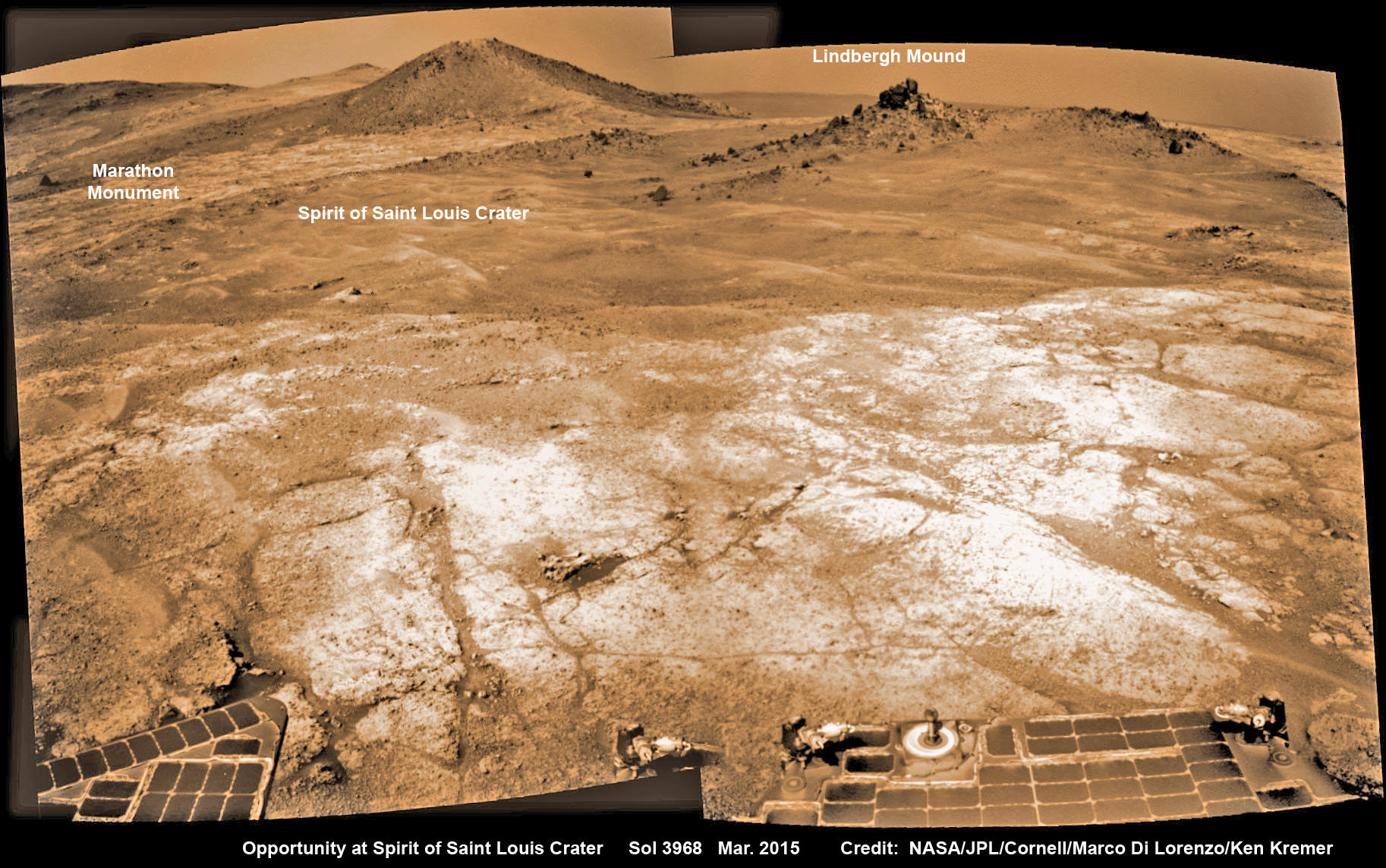
The NASA rover exceeded the distance of a marathon on the surface of Mars on March 24, 2015, Sol 3968. Opportunity has now driven over 26.46 miles (42.59 kilometers) over nearly a dozen Earth years.
Opportunity’s view (annotated) on the day the NASA rover exceeded the distance of a marathon on the surface of Mars on March 24, 2015, Sol 3968 with features named in honor of Charles Lindbergh’s historic solo flight across the Atlantic Ocean in 1927. Rover stands at Spirit of Saint Louis Crater near mountaintop at Marathon Valley overlook and Martian cliffs at Endeavour crater holding deposits of water altered clay minerals. This navcam camera photo mosaic was assembled from images taken on Sol 3968 (March 24, 2015) and colorized. Credit: NASA/JPL/Cornell/Marco Di Lorenzo/Ken Kremer/kenkremer.com
Now for the first time in history, a human emissary has arrived to conduct an up close inspection of and elucidate clues into this regions potential regarding Martian habitability.
The ancient, weathered slopes around Marathon Valley hold a motherlode of ‘phyllosilicate’ clay minerals, based on data obtained from the extensive Mars orbital measurements gathered by the CRISM spectrometer on NASA’s Mars Reconnaissance Orbiter (MRO) – accomplished earlier at the direction of Arvidson.
‘Hinners Point’ Above Floor of ‘Marathon Valley’ on Mars. This Martian scene shows contrasting textures and colors of “Hinners Point,” at the northern edge of “Marathon Valley,” and swirling reddish zones on the valley floor to the left. Credit: NASA/JPL-Caltech/Cornell Univ./Arizona State Univ.
Initially the science team was focused on investigating the northern region of the valley while the sun was still higher in the sky and generating more power for research activities from the life giving solar arrays.
“We have detective work to do in Marathon Valley for many months ahead,” said Opportunity Deputy Principal Investigator Ray Arvidson, of Washington University in St. Louis.
But now that the rover is descending into a narrow valley with high walls, the rovers engineering handlers back on Earth have to exercise added caution regarding exactly where they send the Opportunity on her science forays during each sols drive, in order to maintain daily communications.
The high walls to the north and west of the valley ridgeline has already caused several communications blackouts for the “low-elevation Ultra-High-Frequency (UHF) relay passes to the west,” according to the JPL team controlling the rover.
Indeed on two occasions in mid September – coinciding with the days just before and after our Sol 4144 (Sept. 20) photo mosaic view above, “no data were received as the orbiter’s flight path was below the elevation on the valley ridgeline.
On Sept 17 and Sept. 21 “the high ridgeline of the valley obscured the low-elevation pass” and little to no data were received. However the rover did gather imagery and spectroscopic measurements for later transmission.
Now that winter is approaching the rover is moving to the southern side of Marathon Valley to soak up more of the sun’s rays from the sun-facing slope and continue research activities.
“During the Martian late fall and winter seasons Opportunity will conduct its measurements and traverses on the southern side of the valley,” says Arvidson.
“When spring arrives the rover will return to the valley floor for detailed measurements of outcrops that may host the clay minerals.”
The shortest-daylight period of this seventh Martian winter for Opportunity will come in January 2016.
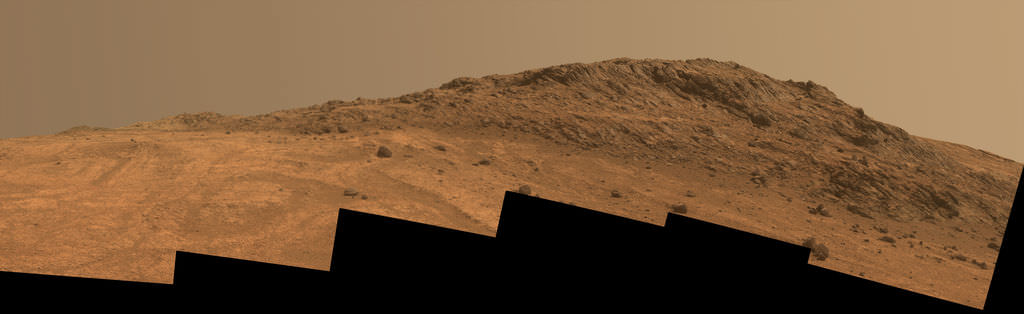
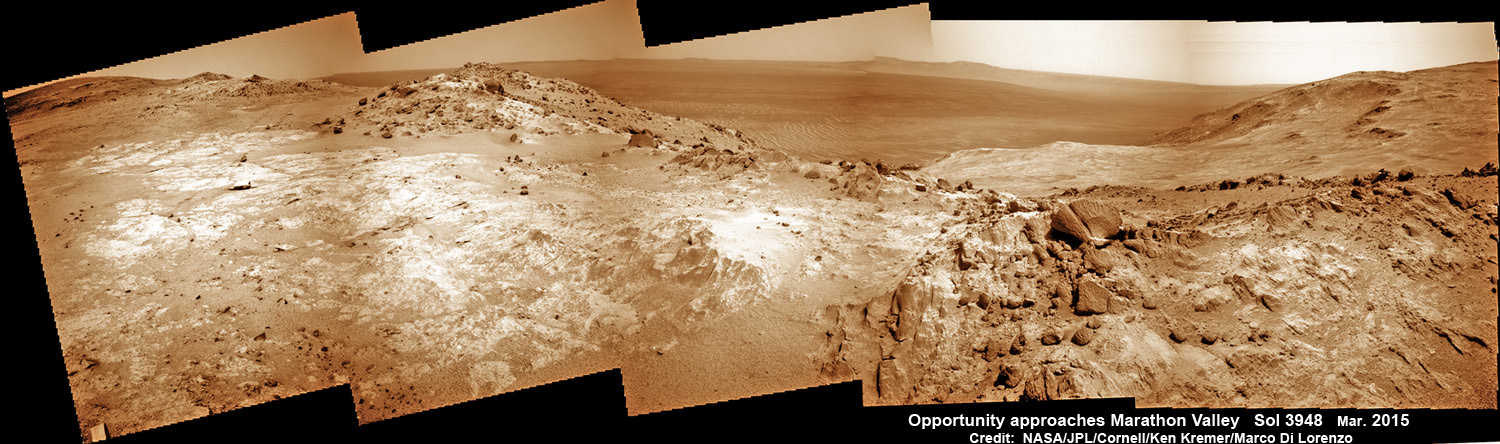
NASA’s Opportunity Rover scans along a spectacular overlook toward Marathon Valley on March 3, 2015, showing flat-faced rocks exhibiting a completely new composition from others examined earlier. Marathon Valley and Martian cliffs on Endeavour crater hold deposits of water altered clay minerals. This navcam camera photo mosaic was assembled from images taken on Sol 3948 (March 3, 2015) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
As of today, Sol 4168, Oct, 15, 2015 Opportunity has taken over 206,300 images and traversed over 26.46 miles (42.59 kilometers).
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
Nearly 12 Year Traverse Map for NASA’s Opportunity rover from 2004 to 2015
This map shows the entire path the rover has driven during almost 12 years and more than a marathon runners distance on Mars for over 4163 Sols, or Martian days, since landing inside Eagle Crater on Jan 24, 2004 – to current location at the western rim of Endeavour Crater and descending into Marathon Valley. Rover surpassed Marathon distance on Sol 3968 and marked 11th Martian anniversary on Sol 3911. Opportunity discovered clay minerals at Esperance – indicative of a habitable zone – and is currently searching for more at Marathon Valley. Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer/kenkremer.com
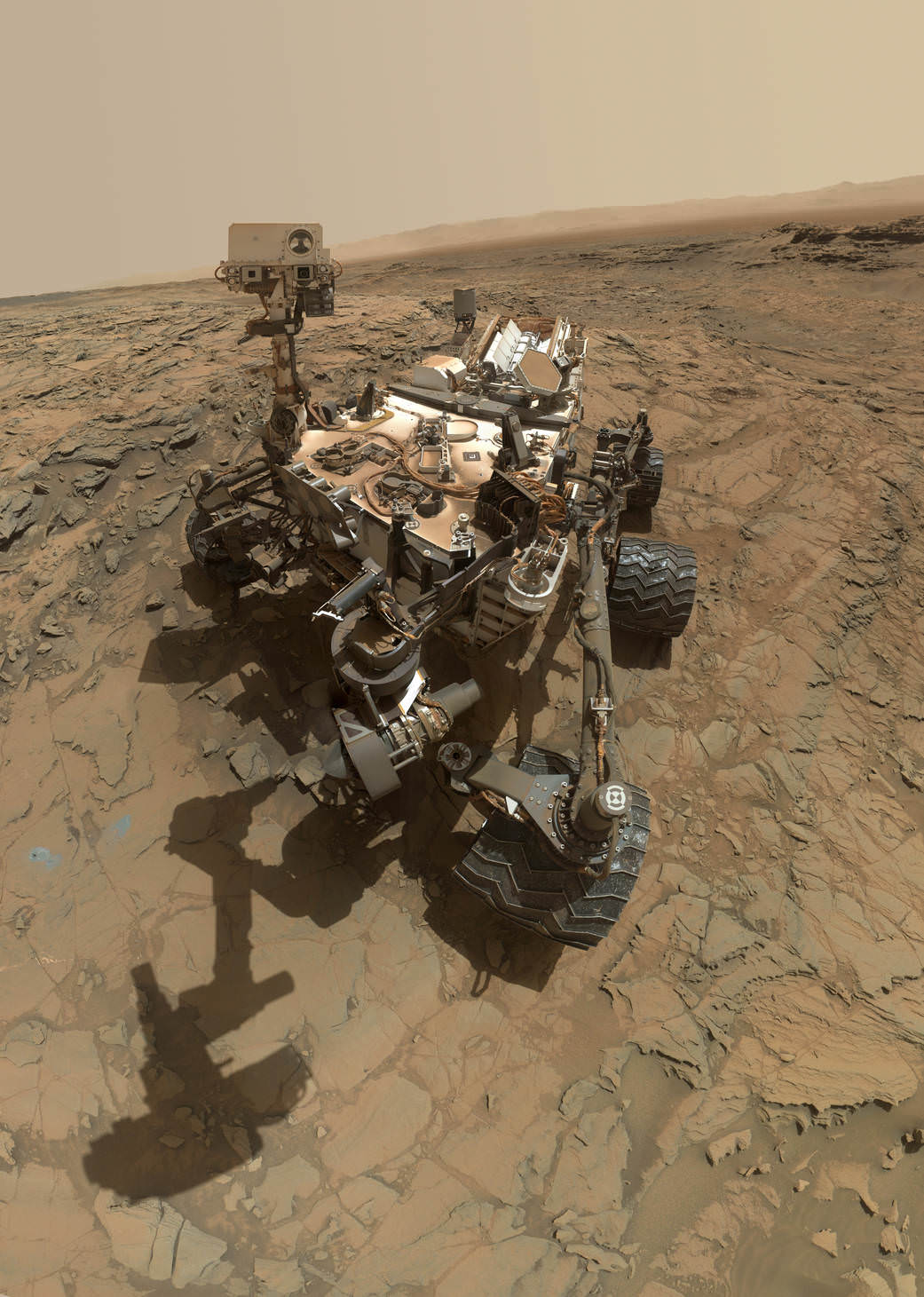
This self-portrait of NASA's Curiosity Mars rover shows the vehicle at the "Big Sky" site. Credit: NASA/JPL-Caltech/MSSS
This self-portrait of NASA’s Curiosity Mars rover shows the vehicle at the “Big Sky” site, where its drill collected the mission’s fifth taste of Mount Sharp, at lower left corner. The scene combines images taken by the Mars Hand Lens Imager (MAHLI) camera on Sol 1126 (Oct. 6, 2015). Credit: NASA/JPL-Caltech/MSSS
See below navcam drilling photo mosaic at Big Sky[/caption]
NASA’s Curiosity rover has managed to snap another gorgeous selfie while she was hard at work diligently completing her newest Martian sample drilling campaign – at the ‘Big Sky’ site at the base of Mount Sharp, the humongous mountain dominating the center of the mission’s Gale Crater landing site – which the science team just confirmed was home to a life bolstering ancient lake based on earlier sample analyses.
And the team is already actively planning for the car sized robots next drill campaign in the next few sols, or Martian days!
Overall ‘Big Sky’ marks Curiosity’s fifth ‘taste’ of Mount Sharp – since arriving at the mountain base one year ago – and eighth drilling operation since the nail biting Martian touchdown in August 2012.
NASA’s newly published self-portrait was stitched from dozens of images taken at Big Sky last week on Oct. 6, 2015, or Sol 1126, by the high resolution Mars Hand Lens Imager (MAHLI) color camera at the end of the rover’s 7 foot long robotic arm. The view is centered toward the west-northwest.
At Big Sky, the Curiosity Mars Science Laboratory (MSL) bored into an area of cross-bedded sandstone rock in the Stimson geological unit on Sept. 29, or Sol 1119. Stimson is located on the lower slopes of Mount Sharp inside Gale Crater.
NASA Curiosity rover reaches out with robotic arm to drill into cross-bedded sandstone rock at ‘Big Sky’ target on Sol 1119, Sept. 29, 2015, in this photo mosaic stitched from navcam camera raw images and colorized. Big Sky is located in the Stimson unit on the lower slopes of Mount Sharp inside Gale Crater. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
“Success! Our drill at “Big Sky” went perfectly!” wrote Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center and a member of the Curiosity ChemCam team.
The drill hole is seen at the lower left corner of the MAHLI camera selfie and appears grey along with grey colored tailing – in sharp contrast to the rust red surface. The hole itself is 0.63 inch (1.6 centimeters) in diameter.
Another panoramic view of the ‘Big Sky’ location shot from the rover’s eye perspective with the mast mounted Navcam camera, is shown in our photo mosaic view herein and created by the image processing team of Ken Kremer and Marco Di Lorenzo. The navcam mosaic was stitched from raw images taken up to Sol 1119 and colorized.
“With Big Sky, we found the ordinary sandstone rock we were looking for,” said Curiosity Project Scientist Ashwin Vasavada, in a statement.
The Big Sky drilling operation is part of a coordinated multi-step campaign to examine different types of sandstone rocks to provide geologic context.
“It also happens to be relatively near sandstone that looks as though it has been altered by fluids — likely groundwater with other dissolved chemicals. We are hoping to drill that rock next, compare the results, and understand what changes have taken place.”
Per normal operating procedures, the Big Sky sample was collected for analysis of the Martian rock’s ingredients in the rover’s two onboard laboratories – the Chemistry and Mineralogy X-Ray diffractometer (CheMin) and the Sample Analysis at Mars (SAM) instrument suite.
“We are all eagerly looking forward to the CheMin results from Big Sky to compare with our previous results from “Buckskin”! noted Anderson.
Curiosity extends robotic arm and conducts sample drilling at “Buckskin” rock target at bright toned “Lion” outcrop at the base of Mount Sharp on Mars, seen at right. Gale Crater eroded rim seen in the distant background at left, in this composite multisol mosaic of navcam raw images taken to Sol 1059, July 30, 2015. Navcam camera raw images stitched and colorized. Inset: MAHLI color camera up close image of full depth drill hole at “Buckskin” rock target on Sol 1060. Credit: NASA/JPL-Caltech/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
This past weekend, Curiosity successfully fed pulverized and sieved samples of Big Sky to the inlet ports for both CheMin and SAM on the rover deck.
“The SAM analysis of the Big Sky drill sample went well and there is no need for another analysis, so the rest of the sample will be dumped out of CHIMRA on Sol 1132,” said Ken Herkenhoff, Research Geologist at the USGS Astrogeology Science Center and an MSL science team member, in a mission update.
Concurrently the team is hard at work readying the rover for the next drill campaign within days, likely at a target dubbed “Greenhorn.”
So the six wheeled rover drove about seven meters to get within range of Greenhorn.
With the sample deliveries accomplished, attention shifted to the next drilling campaign.
Today, Wednesday, Oct. 14, or Sol 1133, Curiosity was commanded “to dump the “Big Sky” sample and “thwack” CHIMRA (the Collection and Handling for in-Situ Martian Rock Analysis) to clean out any remnants of the sample,” wrote Lauren Edgar, a Research Geologist at the USGS Astrogeology Science Center and a member of MSL science team, in a mission update.
The ChemCam and Mastcam instruments are simultaneously making observations of the “Greenhorn” and “Gallatin Pass” targets “to assess chemical variations across a fracture.”
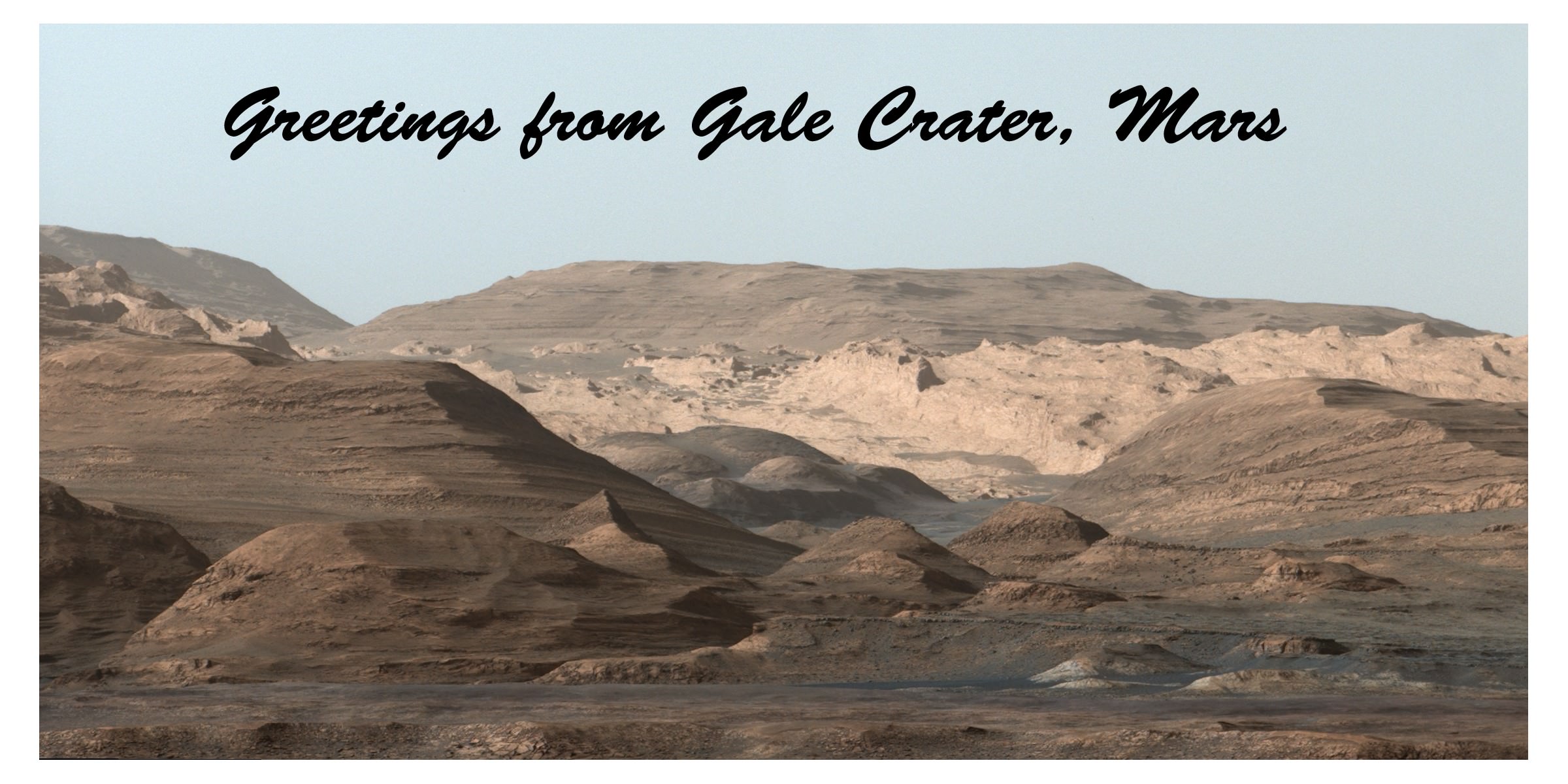
This Martian “postcard” comes after Mars Curiosity drilled its eighth hole on the Red Planet. This composite image looking toward the higher regions of Mount Sharp was taken on September 9, 2015, by NASA’s Curiosity rover. In the foreground — about 2 miles (3 kilometers) from the rover — is a long ridge teeming with hematite, an iron oxide. Credits: NASA/JPL-Caltech/MSSS
Curiosity has already accomplished her primary objective of discovering a habitable zone on the Red Planet – at the Yellowknife Bay area – that contains the minerals necessary to support microbial life in the ancient past when Mars was far wetter and warmer billions of years ago.
As of today, Sol 1133, October 14, 2015, she has driven some 6.9 miles (11.1 kilometers) kilometers and taken over 274,600 amazing images.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
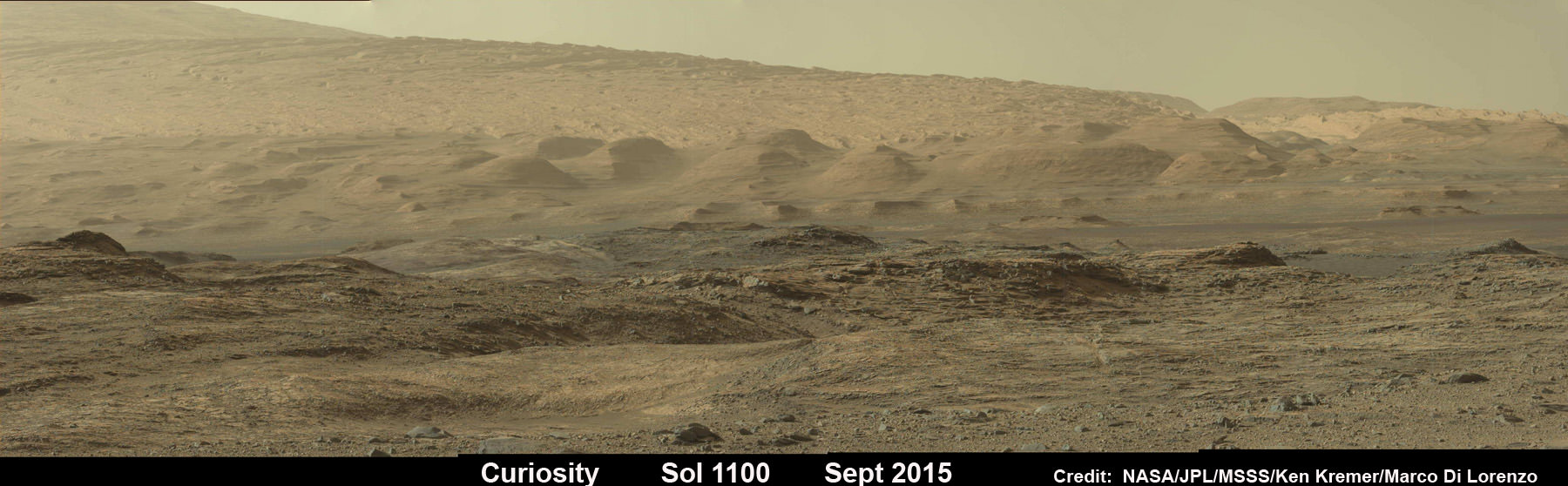
Curiosity looks toward fabulous canyons and buttes at the base of Mount Sharp from the Stimson sand dunes on Mars on Sol 1100, Sept. 10 2015 in this photo mosaic stitched from Mastcam color camera raw images. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo