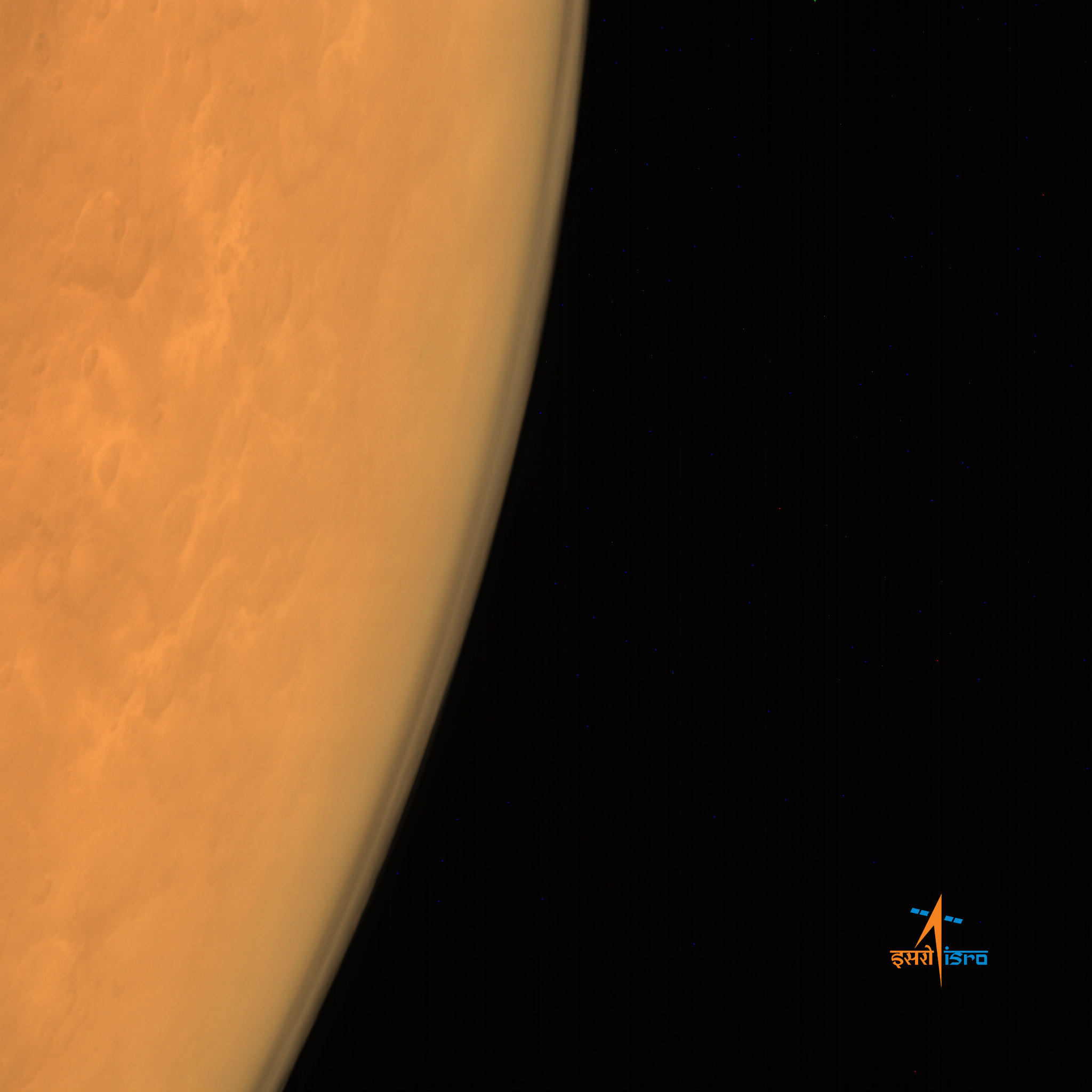
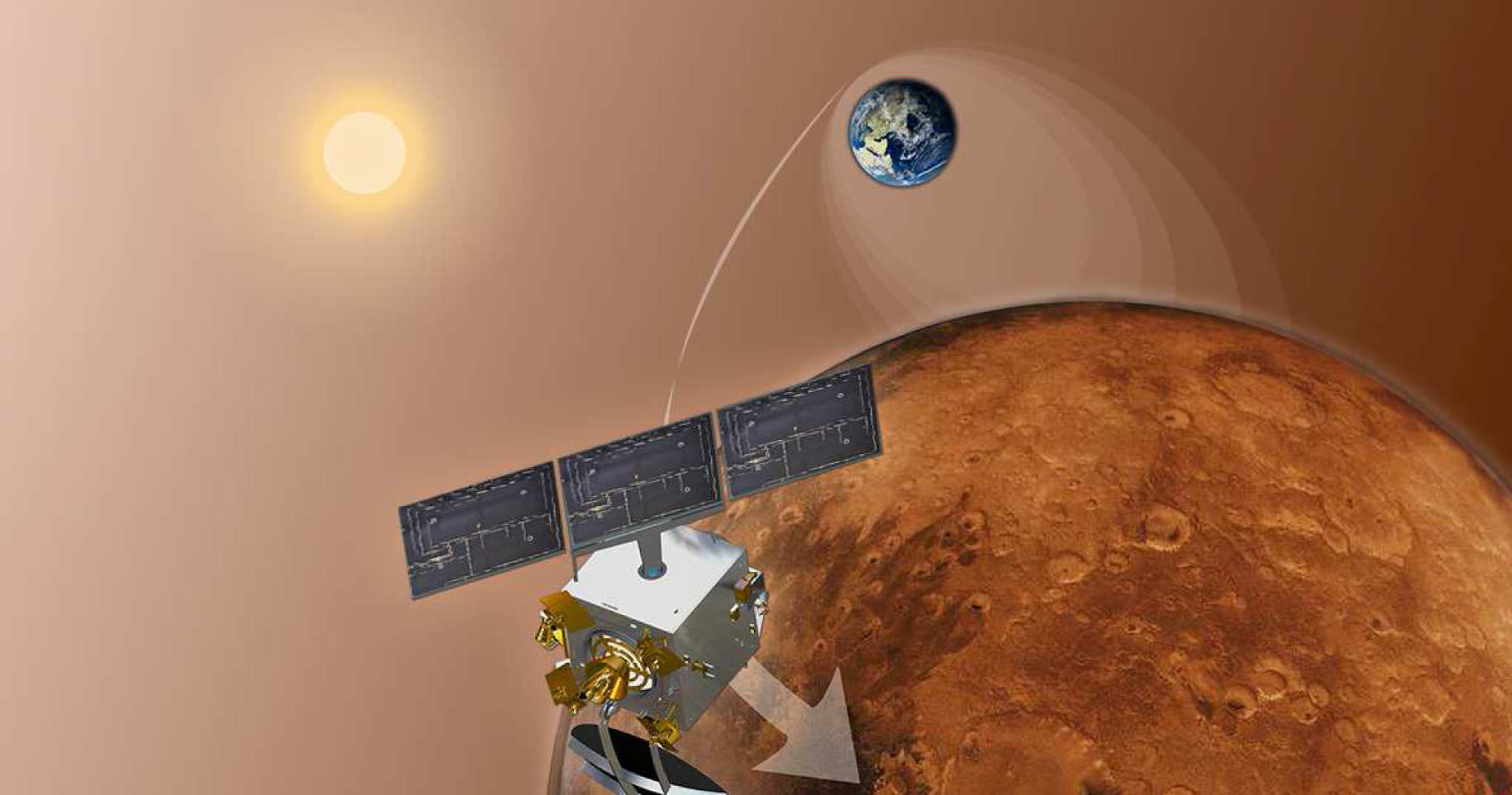
ISRO's Mars Orbiter Mission captures the limb of Mars with the Mars Color Camera from an altitude of 8449 km soon after achieving orbit on Sept. 23/24, 2014. . Credit: ISRO
India’s maiden interplanetary voyager, the Mars Orbiter Mission (MOM) has transmitted a breathtaking new image eyeing the limb of Mars and its atmosphere against the blackness of space.
The beautiful Martian image is only MOM’s second since successfully braking into orbit during the ‘history creating’ insertion maneuver days ago on Sept. 23/24.
The limb image was taken using MOM’s Mars Color Camera (MCC) from an altitude of 8449 kilometers and shows more of an ‘Orange Planet’ rather than a ‘Red Planet.’
“A shot of Martian atmosphere. I’m getting better at it. No pressure,” tweeted ISRO at MOM’s newly established twitter account after entering orbit.
The image has a spatial resolution of 439 meters and is centered around Lat: 20.01N and Lon:31.54E.
MOM’s goal is to study Mars atmosphere , surface environments, morphology, and mineralogy with a 15 kg (33 lb) suite of five indigenously built science instruments. It will also sniff for methane, a potential marker for biological activity.
“The view is nice up here,” ISRO tweeted.
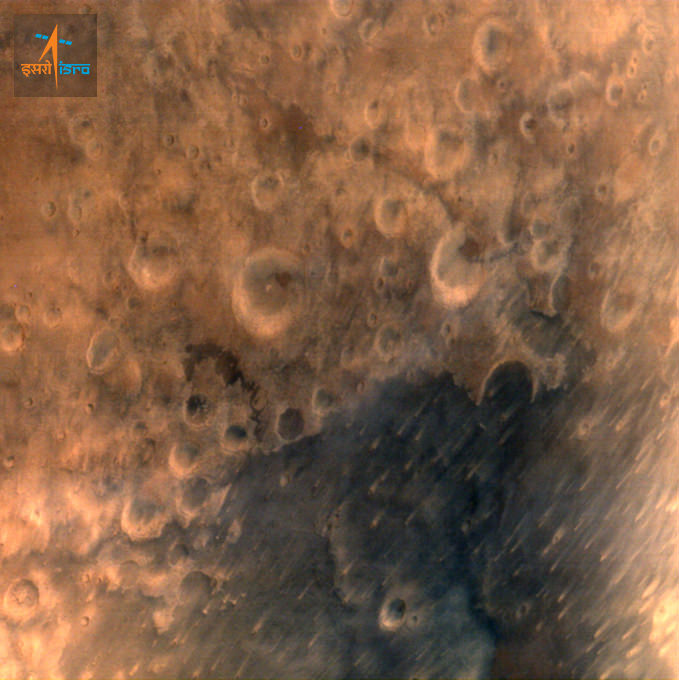
MOM’s first image taken shortly after orbital arrival showed a heavily cratered region of the Red Planet taken by the MCC tri-color camera from a slightly lower altitude of 7300 kilometers with a spatial resolution of 376 meters.
ISRO’s Mars Orbiter Mission captures its first image of Mars from a height of 7300 km. Credit: ISRO
Following MOM’s successful Mars Orbital Insertion (MOI) maneuver, India became the newest member of an elite club of only four entities who have launched probes that successfully investigated Mars – following the Soviet Union, the United States and the European Space Agency (ESA).
Read my complete MOM meets Mars arrival story – here.
MOM is now circling Mars in a highly elliptical orbit whose nearest point to Mars (periapsis) is at 421.7 km and farthest point (apoapsis) at 76,993.6 km. The inclination of orbit with respect to the equatorial plane of Mars is 150 degree, as intended, ISRO reports.
The $73 million mission is expected to last at least six months.
MOM’s success follows closely on the heels of NASA’s MAVEN orbiter which also successfully achieved orbit barely two days earlier on Sept. 21 and could last 10 years or more.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
Artists concept of India’s Mars Orbiter Mission (MOM) successfully achieving Mars orbit on Sept. 23 EDT/Sept. 24 IST . Credit: ISRO
Artists concept of India’s Mars Orbiter Mission (MOM) successfully achieving Mars orbit on Sept. 23 EDT/Sept. 24 IST. Credit: ISRO
Story updated[/caption]
Space history was made today when India’s car sized Mars Orbiter Mission (MOM) successfully fired its braking rockets and arrived in Mars orbit today (Sept. 23 EST/Sept. 24 IST) on the nation’s first attempt to explore the Red Planet. Indeed MOM is India’s maiden interplanetary voyager and “created history.”
India thereby joins an elite club of only three other entities who have launched probes that successfully investigated Mars – following the Soviet Union, the United States and the European Space Agency (ESA).
Wild applause erupted with beaming smiles from ear to ear at India’s Bangalore mission control center after signals confirming a successful full duration firing of the crafts engines for 24 minutes and 13 seconds for the crucial Mars Orbital Insertion (MOI) maneuver that placed MOM into orbit, were received precisely as planned at 10:30 p.m. EDT (Sept 23) or 8:00 IST (Sept. 24).
Traveling at the speed of light it took nearly 12.5 minutes for the good news signals to arrive on Earth from Mars across the vast expanse of some 140 million miles (225 million kilometers) of interplanetary space.
MOM’s Red Planet arrival was webcast live worldwide by the Indian Space Research Organization (ISRO), India’s space agency which designed and developed the orbiter.
ISRO’s website also gave a play by play in real time, announcing the results of critical spacecraft actions along the arrival timeline just moments after they became known.
“India has successfully reached Mars!” declared Indian prime minister Narendra Modi, who watched the events unfold from mission control at ISRO’s Telemetry, Tracking and Command Network (ISTRAC) in Bangalore.
“History has been created today. We have dared to reach out into the unknown and have achieved the near-impossible. I congratulate all ISRO scientists as well as all my fellow Indians on this historic occasion.”
Modi gave a stirring and passionate speech to the team, the nation and a global audience outlining the benefits and importance of India’s space program. He implored the team to strive for even greater space exploration challenges, sounding very much like US President John F. Kennedy over 50 years ago!
“We have gone beyond the boundaries of human enterprise and imagination,” Modi stated. “We have accurately navigated our spacecraft through a route known to very few. And we have done it from a distance so large that it took even a command signal from Earth to reach it more than it takes sunlight to reach us.”
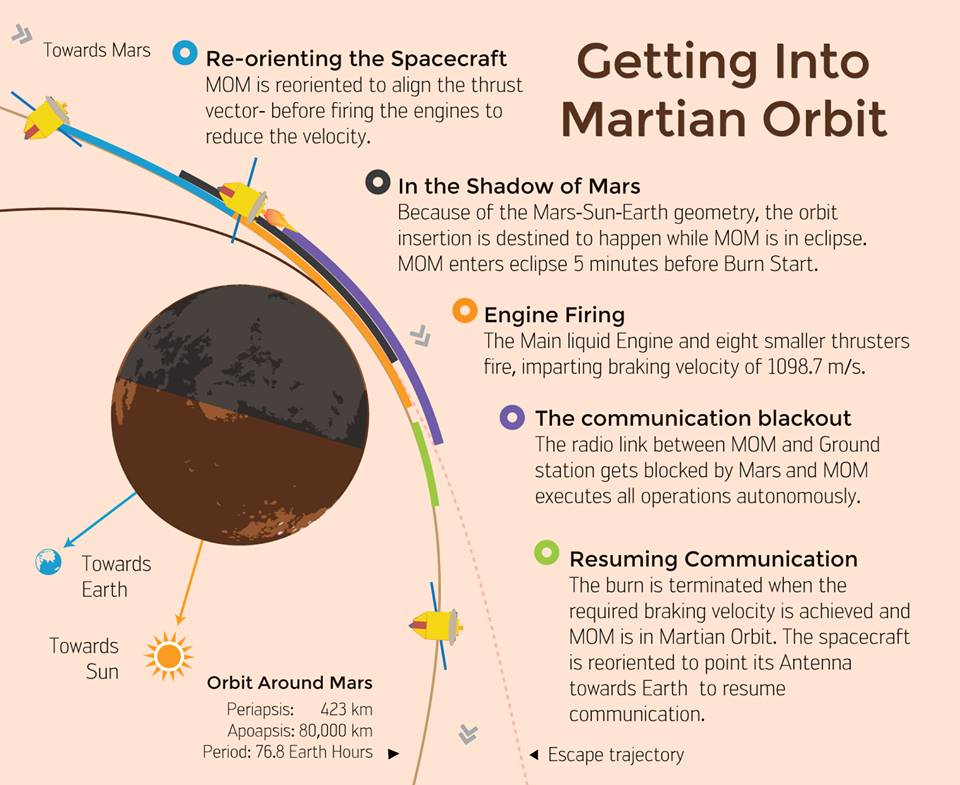
The do-or-die MOI breaking maneuver slowed MOM’s velocity by 1099 m/s (2457 mph) vs. an expected 1098.7 m/s – using the combined thrust of the 440 Newton Liquid Apogee Motor (LAM) main engine and eight smaller 22 newton liquid fueled engines.
The entire MOI maneuver took place fully autonomously under the spacecrafts preprogrammed sole control due to the long communications lag time and also during a partial communications blackout when the probe was traveling behind Mars and the signal was blocked.
MOM’s goal is to study Mars surface features, morphology, mineralogy and the Martian atmosphere with five indigenous scientific instruments. Among other goals it will sniff for methane as a potential marker for biological activity.
MOM’s success follows closely on the heels of NASA’s MAVEN orbiter which also successfully achieved orbit barely two days earlier on Sept. 21.
Modi noted that more than half of all missions to Mars have failed.
“We have prevailed. We have succeeded on our first attempt. We put together the spacecraft in record time, in a mere three years from first studying its feasibility,” Modi elaborated.
“These are accomplishments that will go down in history. Innovation by its very nature involves risk. It is a leap into the dark .. . and the unknown. Space is indeed the biggest unknown out there.”
“Through your brilliance and hard work [at ISRO] you have made a habit of accomplishing the impossible.”
“The success of our space program is a shining symbol of what we are capable of as a nation. Our space program is an example of achievement which inspires us all .. and future generations … to strive for excellence ourselves.”
“Space technology translates to space applications here on Earth … to improve the life of our citizens.”
“Let us set ourselves even more challenging goals and strive even harder to achieve them. Let us push our boundaries. And then push some more, and push some more!” said Modi jubilantly.
MOM now joins Earth’s newly fortified armada of seven spacecraft currently operating on Mars surface or in orbit – including MAVEN, Mars Odyssey (MO), Mars Reconnaissance Orbiter MRO), Mars Express (MEX), Curiosity and Opportunity.
“MOM and MAVEN will keep each other company in orbit,” said Modi.
Today, MOM concluded her over 10 month interplanetary voyage of some 442 million miles (712 million km) from Earth to the Red Planet.
“Congratulations to the MOM team on behalf of the entire MAVEN team! Here’s to exciting science from the two latest missions to join the Mars fleet!”, wrote Bruce Jakosky, MAVEN Principal Investigator, in a post on the ISRO MOM facebook page.
ISRO’s Mars Orbiter Mission – The plan of action for Mars Orbit Insertion on September 24. Credit ISRO
MOM was launched on Nov. 5, 2013 from India’s spaceport at the Satish Dhawan Space Centre, Sriharikota, atop the nations indigenous four stage Polar Satellite Launch Vehicle (PSLV).
The flight path of the approximately $73 Million probe was being continuously monitored by the Indian Deep Space Network (IDSN) and NASA JPL’s Deep Space Network (DSN) to maintain its course.
“The events related to Mars Orbit Insertion progressed satisfactorily and the spacecraft performance was normal. The Spacecraft is now circling Mars in an orbit whose nearest point to Mars (periapsis) is at 421.7 km and farthest point (apoapsis) at 76,993.6 km. The inclination of orbit with respect to the equatorial plane of Mars is 150 degree, as intended. In this orbit, the spacecraft takes 72 hours 51 minutes 51 seconds to go round the Mars once,” according to an ISRO statement.
MOM is expected to investigate the Red Planet for at least six months.
Although MOM’s main objective is a demonstration of technological capabilities, she will also study the planet’s atmosphere and surface.
The probe is equipped with five indigenous instruments to conduct meaningful science – including a tri color imager (MCC) and a methane gas sniffer (MSM) to study the Red Planet’s atmosphere, morphology, mineralogy and surface features. Methane on Earth originates from both geological and biological sources – and could be a potential marker for the existence of Martian microbes.
Both MAVEN and MOM’s goal is to study the Martian atmosphere , unlock the mysteries of its current atmosphere and determine how, why and when the atmosphere and liquid water was lost – and how this transformed Mars climate into its cold, desiccated state of today.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
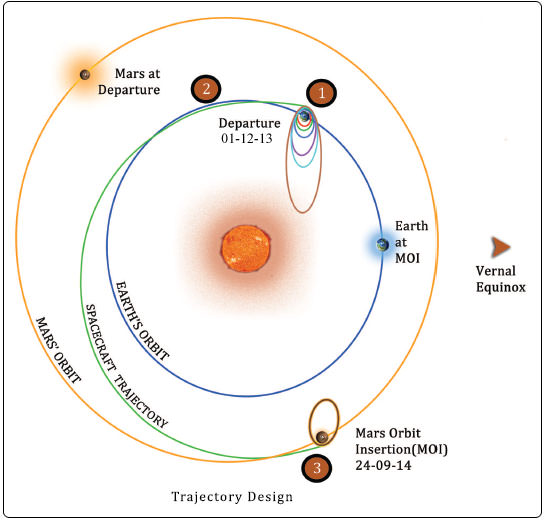
Trans Mars Injection (TMI), carried out on Dec 01, 2013 at 00:49 hrs (IST) has moved the spacecraft in the Mars Transfer Trajectory (MTT). With TMI the Earth orbiting phase of the spacecraft ended and the spacecraft is now on a course to encounter Mars after a journey of about 10 months around the Sun. Credit: ISRO
The Mars Orbiter Mission (MOM) is India’s first mission to the Red Planet. The historic arrival on Sept. 23/24 will be webcast live by ISRO. Details below. Credit: ISRO
Its D-Day for MOM! The Mars Orbiter Mission (MOM) is India’s history making first mission to the Red Planet and she arrives today, Sept. 23/24 !
MOM’s goal is to study Mars’ surface features, morphology, mineralogy, and the Martian atmosphere with five indigenous scientific instruments. Among other goals it will sniff for methane.
Depending on your time zone, today’s historic arrival falls on either Sept. 23 (EST) or Sept. 24 (IST).
MOM’s entire future depends on conducting a successful and precise, do-or-die Mars Orbital Insertion (MOI) braking burn just hours from now.
The MOI engine firing is targeted for Sept. 23 at 9:47:32 p.m. EDT and Sept. 24 at 07:17:32 hrs IST.
And you can watch all the action live as it happens via a live webcast from the Indian Space Research Organization (ISRO) website, India’s space agency which designed and developed MOM for about $69 Million.
ISRO’s live streaming webcast starts on the US East Coast today, Sept. 23, at 9:15 p.m. EDT and in India on Sept. 24 at 6:45 IST: http://www.isro.org/
Here’s another webcast link for MOM’s Mars Orbit Insertion (MOI) from ISTRAC, Bangalore: http://webcast.isro.gov.in/
The MOI burn involves firing the probes 440 Newton Liquid Apogee Motor (LAM) and eight smaller 22 Newton liquid fueled engines for a duration of about 24 minutes to enter Mars’ orbit.
Confirmation of a successful start to the engine burn could be received back on Earth at about 10 p.m. EDT or 7:30 IST. Confirmation of a successful MOI conclusion could be received by about 10:30 p.m. EDT or 8:00 IST
On Monday, Sept 22, engineers at the Bangalore mission control center verified the performance and readiness of the LAM by conducting the final Trajectory Correction Maneuver (TCM-4) with a engine burst duration of 3.968 seconds.
“We had a perfect burn for four seconds as programmed. MOM will now go-ahead with the nominal plan for Mars Orbital Insertion,” said ISRO.
The Indian engineering team has only one chance to get it right, and the entire world is pulling for India. NASA, JPL, and the DSN have sent along extra special good luck wishes in the form of group photos below.
Good luck wishes for MOM from NASA and JPL. Credit: NASA/ISRO
Everyone is wishing for complete success for the probe which reaches Mars just two days after NASA’s MAVEN orbiter successfully achieved orbit on Sunday night, Sept. 21.
“We wish a successful MOI for MOM,” said Bruce Jakosky, MAVEN principal investigator with the Laboratory for Atmospheric and Space Physics at the University of Colorado, Boulder (CU/LASP) at MAVEN’s post MOI briefing on Monday, Sept. 22.
ISRO reports today that all systems are currently “GO.”
Watch this cool animation showing the interplanetary path of MOM and MAVEN from Earth to Mars sent to me be an appreciative reader – Sankaranarayanan K V:
If all goes well, MOM will join Earth’s newly fortified armada of six spacecraft operating on Mars surface or in orbit – MAVEN, Mars Odyssey (MO), Mars Reconnaissance Orbiter (MRO), Mars Express (MEX), Curiosity, and Opportunity.
Today, MOM concludes her 10 month interplanetary voyage of some 442 million miles (712 million km) from Earth to the Red Planet.
Good luck MOM!
ISRO’s Mars Orbiter Mission – The plan of action for Mars Orbit Insertion on September 24. Credit ISRO
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
India’s Mars Orbiter Mission (MOM) is closing in on the Red Planet and the Mars Orbit Insertion engine firing when it arrives on September 24, 2014 after its 10 month interplanetary journey. Credit ISRO
Two days out from her history making date with destiny, India’s Mars Orbiter Mission (MOM) successfully completed a crucial test firing of the spacecraft’s main liquid engine to confirm its operational readiness for the critical Mars Orbital Insertion (MOI) engine firing on Wednesday morning Sept. 24 IST (Tuesday evening Sept. 23 EDT).
Engineers at the Indian Space Research Organization (ISRO) which designed and developed MOM successfully fired the probes 440 Newton Liquid Apogee Motor (LAM) earlier today, Sept. 22, 2014, for a duration of 3.968 seconds at 1430 hrs IST (Indian Standard Time), according to today’s announcement from ISRO.
“We had a perfect burn for four seconds as programmed. MOM will now go-ahead with the nominal plan for Mars Orbital Insertion,” said ISRO.
ISRO’s Mars Orbiter Mission – The plan of action for Mars Orbit Insertion on September 24. Credit ISRO
MOM counts as India’s first interplanetary voyager and the nation’s first manmade object to orbit the 4th rock from our Sun – if all goes well.
The LAM was last fired over nine months ago on December 01, 2013 to inject MOM into a ten month long interplanetary Trans Mars Trajectory.
Today’s operation verified that LAM is fully operational to perform the do-or-die MOI braking burn on Sept. 24 targeted for 07:17:32 hrs IST (Sept. 23, 9:47:32 p.m. EDT) that will place the probe into a highly elliptical 377 km x 80,000 km orbit around the Red Planet.
You can watch all the action live on ISRO’s website during the streaming webcast starting at 6:45 IST (9:15 p.m. EDT): http://www.isro.org/
The burn was also marks the spacecraft’s final Trajectory Correction Maneuver known as TCM-4 and changed its velocity by 2.18 meters/second.
“The trajectory has been corrected,” said ISRO.
The $69 Million probe is being continuously monitored by the Indian Deep Space Network (IDSN) and NASA JPL’s Deep Space Network (DSN) to maintain its course.
Trans Mars Injection (TMI), carried out on Dec 01, 2013 at 00:49 hrs (IST) has moved the spacecraft in the Mars Transfer Trajectory (MTT). With TMI the Earth orbiting phase of the spacecraft ended and the spacecraft is now on a course to encounter Mars after a journey of about 10 months around the Sun. Credit: ISRO
ISRO space engineers are taking care to precisely navigate MOM to keep it on course during its long heliocentric trajectory from Earth to Mars through a series of in flight Trajectory Correction Maneuvers (TCMs).
The last TCM was successfully performed on June 11 by firing the spacecraft’s 22 Newton thrusters for a duration of 16 seconds. TCM-1 was conducted on December 11, 2013 by firing the 22 Newton Thrusters for 40.5 seconds.
Engineers determined that a TCM planned for August was not needed.
On “D-Day” as ISRO calls it, the LAM and the eight smaller 22 Newton liquid fueled engines are scheduled to fire for a duration of about 24 minutes.
The MOI braking burn will be carried out fully autonomously since MOM will be eclipsed by Mars due to the Sun-Earth-Mars geometry about five minutes prior to initiation of the engine firing.
Round trip radio signals communicating with MOM now take some 21 minutes.
The 1,350 kilogram (2,980 pound) probe has been streaking through space for over ten months.
MOM follows hot on the heels of NASA’s MAVEN spacecraft which successfully achieved Red Planet orbit less than a day ago on Sunday, Sept. 22, 2014.
“We wish a successful MOI for MOM,” said Bruce Jakosky, MAVEN principal investigator with the Laboratory for Atmospheric and Space Physics at the University of Colorado, Boulder (CU/LASP) at MAVEN’s post MOI briefing earlier today.
MOM was launched on Nov. 5, 2013 from India’s spaceport at the Satish Dhawan Space Centre, Sriharikota, atop the nation’s indigenous four stage Polar Satellite Launch Vehicle (PSLV) which placed the probe into its initial Earth parking orbit.
Watch this cool animation showing the interplanetary path of MOM and MAVEN from Earth to Mars sent to me be an appreciative reader – Sankaranarayanan K V:
Although MOM’s main objective is a demonstration of technological capabilities, she will also study the planet’s atmosphere and surface.
The probe is equipped with five indigenous instruments to conduct meaningful science – including a tri-color imager (MCC) and a methane gas sniffer (MSM) to study the Red Planet’s atmosphere, morphology, mineralogy and surface features. Methane on Earth originates from both geological and biological sources – and could be a potential marker for the existence of Martian microbes.
Both MAVEN’s and MOM’s goal is to study the Martian atmosphere , unlock the mysteries of its current atmosphere and determine how, why and when the atmosphere and liquid water was lost – and how this transformed Mars’ climate into its cold, desiccated state of today.
If all goes well, India will join an elite club of only four who have launched probes that successfully investigated the Red Planet from orbit or the surface – following the Soviet Union, the United States and the European Space Agency (ESA).
Stay tuned here for Ken’s continuing MOM, MAVEN, Rosetta, Opportunity, Curiosity, Mars rover and more Earth and planetary science and human spaceflight news.
Blastoff of the Indian developed Mars Orbiter Mission (MOM) on Nov. 5, 2013 from the Indian Space Research Organization’s (ISRO) Satish Dhawan Space Centre SHAR, Sriharikota. Credit: ISRO
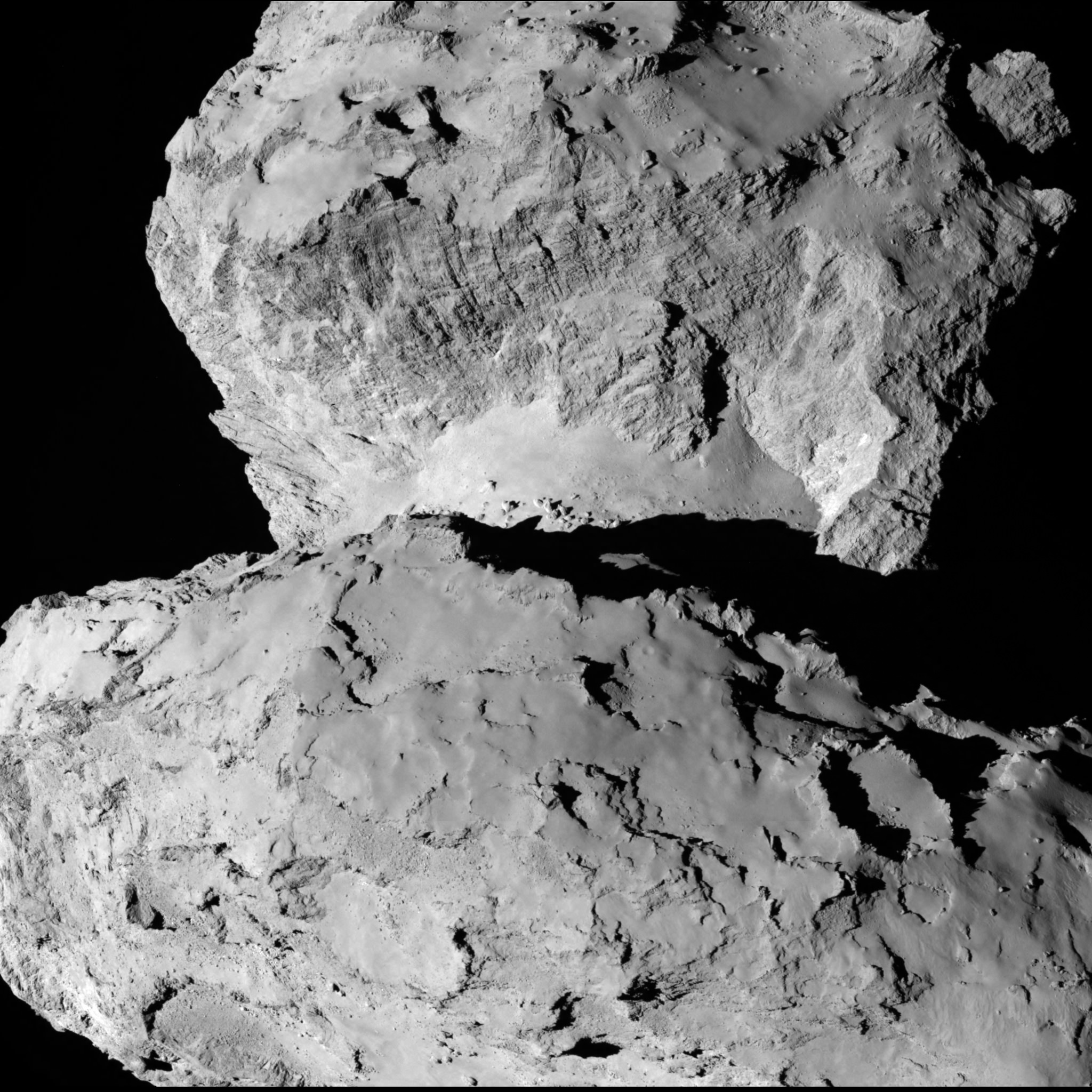
Four-image photo mosaic comprising images taken by Rosetta's navigation camera on 31 August 2014 from a distance of 61 km from comet 67P/Churyumov-Gerasimenko. The mosaic has been contrast enhanced to bring out details. The comet nucleus is about 4 km across. Credits: ESA/Rosetta/NAVCAM/Ken Kremer/Marco Di Lorenzo
Four-image photo mosaic comprising images taken by Rosetta’s navigation camera on 31 August 2014 from a distance of 61 km from comet 67P/Churyumov-Gerasimenko. The mosaic has been contrast enhanced to bring out details. The comet nucleus is about 4 km across.
Credits: ESA/Rosetta/NAVCAM/Ken Kremer – kenkremer.com/Marco Di Lorenzo
See rotated version and 4 individual images below[/caption]
ESA’s Rosetta orbiter has now moved in so close to its comet quarry that the primordial body overwhelms the screen, and thus its snapping mapping mosaics to capture the complete scene of the bizarre world so it can find the most suitable spot for the momentous Philae landing – upcoming in mid-November.
In fact Rosetta has ‘drawn and quartered’ the comet to collect high resolution views of Comet 67P/Churyumov-Gerasimenko with the navcam camera on Sunday, August 31.
The navcam quartet has just been posted to the Rosetta portal today, Monday, September 1, 2014. ESA invited readers to create global photo mosaics.
See above our four frame photo mosaic of navcam images Rosetta took on Aug. 31.
The purpose of taking the images as well as spectra and physical measurements up close is to find a ‘technically feasible’ Philae touchdown site that is both safe and scientifically interesting.
Below is the Rosetta teams four image navcam montage, arranged individually in a 2 x 2 raster.
Four-image montage comprising images taken by Rosetta’s navigation camera on 31 August 2014 from a distance of 61 km from comet 67P/Churyumov-Gerasimenko. The comet nucleus is about 4 km across. Credits: ESA/Rosetta/NAVCAM
The navcam image raster sequence was taken from a distance of 61 km from comet 67P.
“Roughly one quarter of the comet is seen in the corner of each of the four images. The four images are taken over an approximately 20 minute period, meaning that there is some motion of the spacecraft and rotation of the comet between the images. As a result, making a clean mosaic out of the four images is not simple,” according to ESA’s Rosetta blog.
As I reported here last week, the ‘Top 5’ landing site candidates have been chosen for the Rosetta orbiters piggybacked Philae lander for humankind’s first attempt to land on a comet.
The potential touchdown sites were announced on Aug. 25, based on a thorough analysis of high resolution measurements collected by ESA’s Rosetta spacecraft over the prior weeks since it arrived at the pockmarked Comet 67P/Churyumov-Gerasimenko on Aug. 6, 2014.
See our montage of the ‘Top 5’ landing sites below.
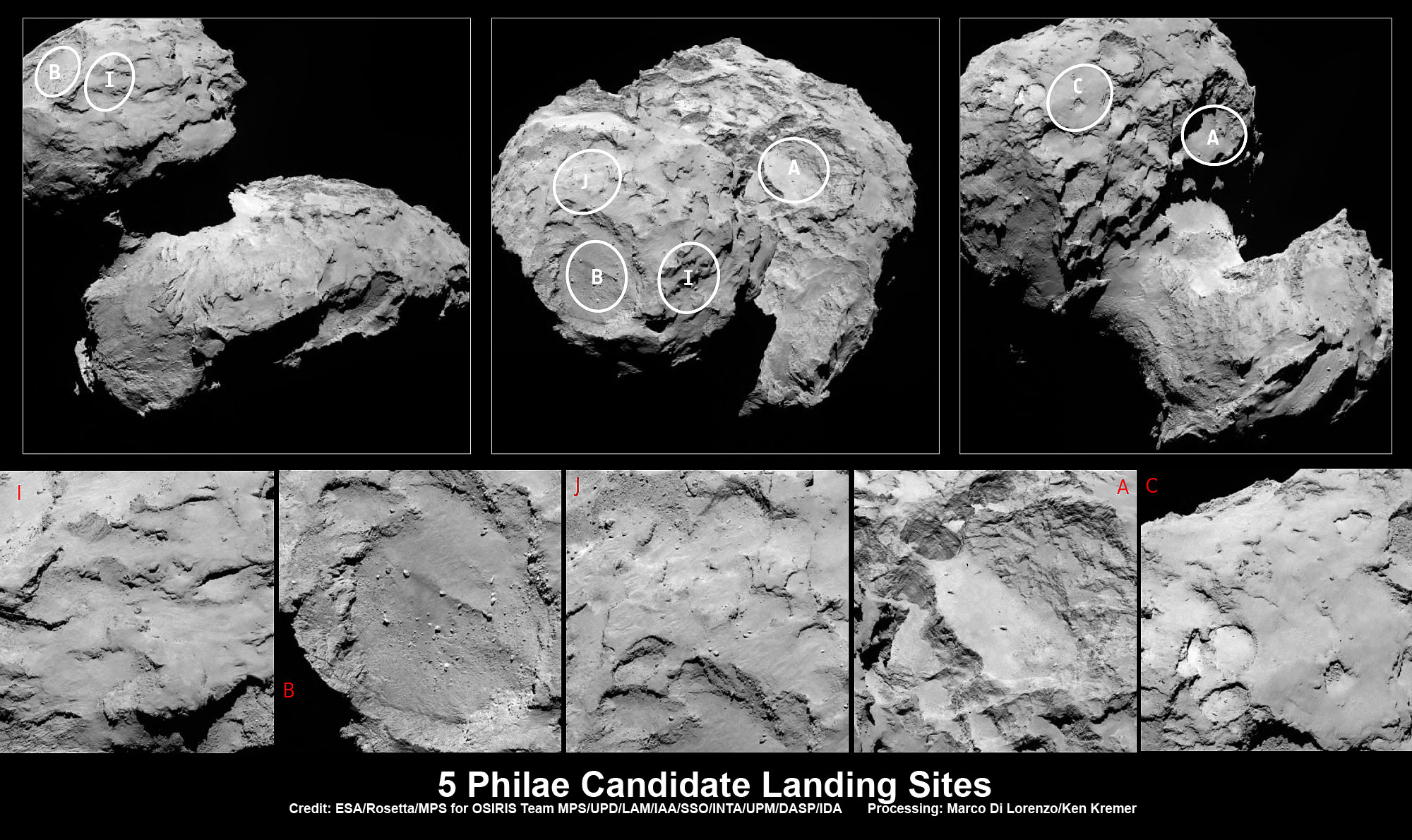
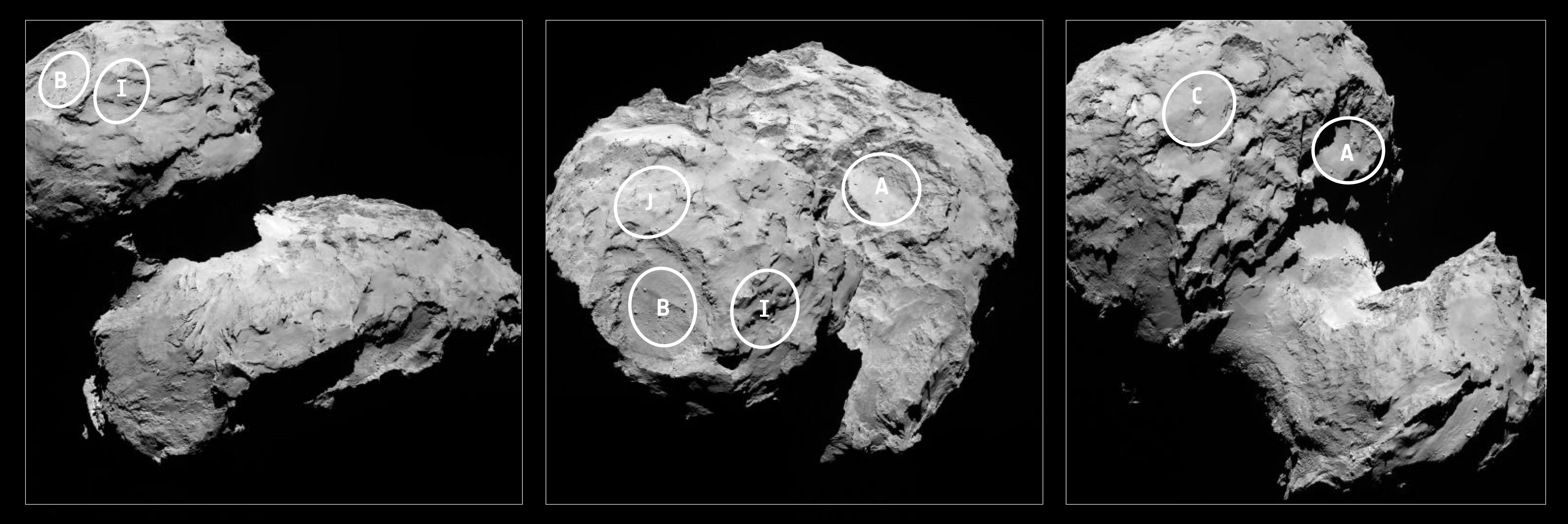
Five candidate sites were identified on Comet 67P/Churyumov-Gerasimenko for Rosetta’s Philae lander. The approximate locations of the five regions are marked on these OSIRIS narrow-angle camera images taken on 16 August 2014 from a distance of about 100 km. Enlarged insets below highlight 5 landing zones. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Processing: Marco Di Lorenzo/Ken Kremer
Rosetta is a mission of many firsts, including history’s first ever attempt to orbit a comet for long term study.
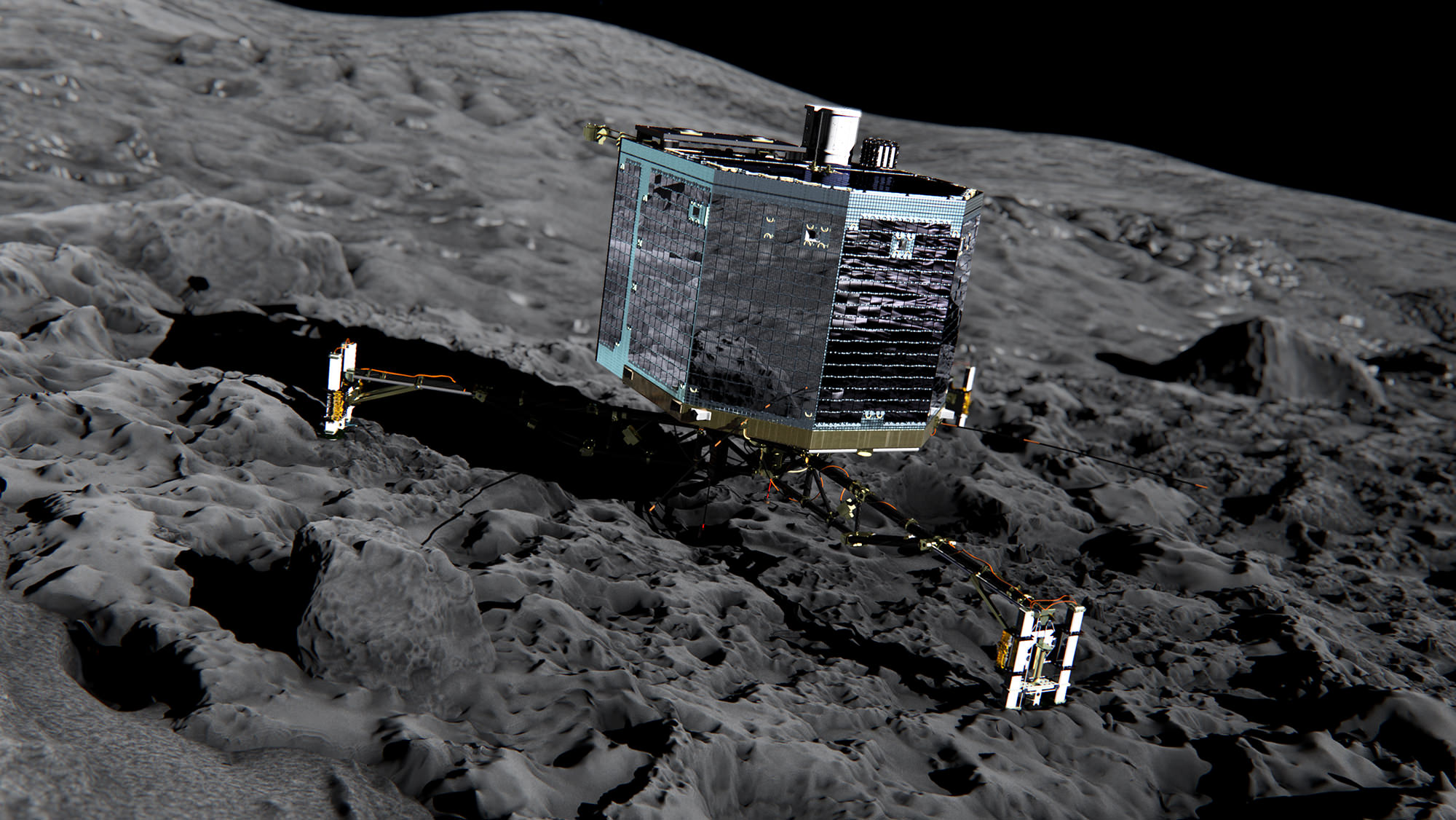
Philae’s history making landing on comet 67P is currently scheduled for around Nov. 11, 2014, and will be entirely automatic. The 100 kg lander is equipped with 10 science instruments.
The new images released today are the best taken so far by the Navcam camera. The probes OSIRIS science camera are even more detailed, and will hopefully be released by ESA soon!
“This is the first time landing sites on a comet have been considered,” said Stephan Ulamec, Lander Manager at DLR (German Aerospace Center), in an ESA statement.
Since rendezvousing with the comet after a decade long chase of over 6.4 billion kilometers (4 Billion miles), a top priority task for the science and engineering team leading Rosetta has been “Finding a landing strip” for the Philae comet lander.
“The clock is ticking’ to select a suitable landing zone soon since the comet warms up and the surface becomes ever more active as it swings in closer to the sun and makes the landing ever more hazardous.
This image of comet 67P/Churyumov-Gerasimenko shows the diversity of surface structures on the comet’s nucleus. It was taken by the Rosetta spacecraft’s OSIRIS narrow-angle camera on August 7, 2014. At the time, the spacecraft was 65 miles (104 kilometers) away from the 2.5 mile (4 kilometer) wide nucleus. Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA/Enhanced processing Marco Di Lorenzo/Ken Kremer
The three-legged lander will fire two harpoons and use ice screws to anchor itself to the 4 kilometer (2.5 mile) wide comet’s surface. Philae will collect stereo and panoramic images and also drill 23 centimeters into and sample its incredibly varied surface.
Stay tuned here for Ken’s continuing Rosetta, Earth and Planetary science and human spaceflight news.
Four-image photo mosaic comprising images taken by Rosetta’s navigation camera on 31 August 2014 from a distance of 61 km from comet 67P/Churyumov-Gerasimenko. The mosaic has been rotated and contrast enhanced to bring out details. The comet nucleus is about 4 km across. Credits: ESA/Rosetta/NAVCAM/Ken Kremer/Marco Di LorenzoESA’s Rosetta spacecraft on final approach to Comet 67P/Churyumov-Gerasimenko in early August 2014. This collage of navcam imagery from Rosetta was taken on Aug. 1, 2, 3 and 4 from distances of 1026 km, 500 km, 300 km and 234 km. Not to scale. Credit: ESA/Rosetta/NAVCAM – Collage/Processing: Marco Di Lorenzo/Ken Kremer- kenkremer.com
Five candidate sites were identified on Comet 67P/Churyumov-Gerasimenko for Rosetta’s Philae lander. The approximate locations of the five regions are marked on these OSIRIS narrow-angle camera images taken on 16 August 2014 from a distance of about 100 km. Enlarged insets below highlight 5 landing zones. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Processing: Marco Di Lorenzo/Ken Kremer
Five candidate sites were identified on Comet 67P/Churyumov-Gerasimenko for Rosetta’s Philae lander. The approximate locations of the five regions are marked on these OSIRIS narrow-angle camera images taken on 16 August 2014 from a distance of about 100 km. Enlarged insets below highlight 5 landing zones. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Processing: Marco Di Lorenzo/Ken Kremer
Story updated[/caption]
The ‘Top 5’ landing site candidates have been chosen for the Rosetta orbiters piggybacked Philae lander for humankind’s first attempt to land on a comet. See graphics above and below.
The potential touchdown sites were announce today, Aug. 25, based on high resolution measurements collected by ESA’s Rosetta spacecraft over the past two weeks since arriving at the bizarre and pockmarked Comet 67P/Churyumov-Gerasimenko on Aug. 6, 2014.
Rosetta is a mission of many firsts, including history’s first ever attempt to orbit a comet for long term study.
Philae’s history making landing on comet 67P is currently scheduled for around Nov. 11, 2014, and will be entirely automatic. The 100 kg lander is equipped with 10 science instruments.
“This is the first time landing sites on a comet have been considered,” said Stephan Ulamec, Lander Manager at DLR (German Aerospace Center), in an ESA statement.
Artist impression of Philae on the surface of comet 67P/Churyumov-Gerasimenko. Credit: ESA/ATG medialab
Since rendezvousing with the comet after a decade long chase of over 6.4 billion kilometers (4 Billion miles), a top priority task for the science and engineering team leading Rosetta has been “Finding a landing strip” for the Philae comet lander.
“The challenge ahead is to map the surface and find a landing strip,” said Andrea Accomazzo, ESA Rosetta Spacecraft Operations Manager, at the Aug. 6 ESA arrival live webcast.
So ‘the clock is ticking’ to select a suitable landing zone soon as the comet warms up and the surface becomes ever more active as it swings in closer to the sun and makes the landing ever more hazardous.
This past weekend, the site selection team met at CNES, Toulouse, France, and intensively discussed and scrutinized a preliminary list of 10 potential sites, and whittled that down to the ‘Top 5.’
Their goal was to find a ‘technically feasible’ touchdown site that was both safe and scientifically interesting.
“The site must balance the technical needs of the orbiter and lander during all phases of the separation, descent, and landing, and during operations on the surface with the scientific requirements of the 10 instruments on board Philae,” said ESA.
They also had to be within an ellipse of at least 1 square kilometer (six-tenths of a square mile) in diameter due to uncertainties in navigation as well as many other factors.
“For each possible zone, important questions must be asked: Will the lander be able to maintain regular communications with Rosetta? How common are surface hazards such as large boulders, deep crevasses or steep slopes? Is there sufficient illumination for scientific operations and enough sunlight to recharge the lander’s batteries beyond its initial 64-hour lifetime, while not so much as to cause overheating?” according to ESA.
Stephan Ulamec, Philae Lander Manager at DLR (German Aerospace Center) discusses landing during ESA webcast of Rosetta’s arrival at comet Comet 67P/Churyumov-Gerasimenko. Credit: ESA
The Landing Site Selection Group (LSSG) team was comprised of engineers and scientists from Philae’s Science, Operations and Navigation Centre (SONC) at CNES, the Lander Control Centre (LCC) at DLR, scientists representing the Philae Lander instruments as well as the ESA Rosetta team, which includes representatives from science, operations and flight dynamics.
“Based on the particular shape and the global topography of Comet 67P/ Churyumov-Gerasimenko, it is probably no surprise that many locations had to be ruled out,” said Ulamec.
“The candidate sites that we want to follow up for further analysis are thought to be technically feasible on the basis of a preliminary analysis of flight dynamics and other key issues – for example they all provide at least six hours of daylight per comet rotation and offer some flat terrain. Of course, every site has the potential for unique scientific discoveries.”
When Rosetta arrived on Aug. 6, it was initially orbiting at a distance of about 100 km (62 miles) in front of the comet. Carefully timed thruster firings then brought it to within about 80 km distance. And it is moving far closer – to within 50 kilometers (31 miles) and even closer!
Upon arrival the comet was 522 million km from the Sun. As Rosetta escorts the comet looping around the sun, they move much closer. By landing time in mid-November they are only about 450 million km (280 million mi) from the sun.
At closest approach on 13 August 2015 the comet and Rosetta will be 185 million km from the Sun. That corresponds to an eightfold increase in the light received from the Sun.
Five candidate sites were identified on Comet 67P/Churyumov-Gerasimenko for Rosetta’s Philae lander. The approximate locations of the five regions are marked on these OSIRIS narrow-angle camera images taken on 16 August 2014 from a distance of about 100 km. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
Therefore Rosetta and Philae will simultaneously study the warming effects of the sun as the comet outgases dust, water and much more.
The short period Comet 67P/Churyumov-Gerasimenko has an orbital period of 6.5 years.
“The comet is very different to anything we’ve seen before, and exhibits spectacular features still to be understood,” says Jean-Pierre Bibring, a lead lander scientist and principal investigator of the CIVA instrument.
“The five chosen sites offer us the best chance to land and study the composition, internal structure and activity of the comet with the ten lander experiments.”
A close-up view of Comet 67P/Churyumov–Gerasimenko taken by the Rosetta spacecraft on Aug. 7, 2014. Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
The ‘Top 5’ zones will be ranked by 14 September. Three are on the ‘head’ and two are on the ‘body’ of the bizarre two lobed alien world.
And a backup landing site will also be chosen for planning purposes and to develop landing sequences.
The ultimate selection of the primary landing site is slated for 14 October after consultation between ESA and the lander team on a “Go/No Go” decision.
The three-legged lander will fire two harpoons and use ice screws to anchor itself to the 4 kilometer (2.5 mile) wide comet’s surface. Philae will collect stereo and panoramic images and also drill 23 centimeters into and sample its incredibly varied surface.
Why study comets?
Comets are leftover remnants from the formation of the solar system. Scientists believe they delivered a vast quantity of water to Earth. They may have also seeded Earth with organic molecules – the building blocks of life as we know it.
Any finding of organic molecules will be a major discovery for Rosetta and ESA and inform us about the origin of life on Earth.
Read an Italian language version of this story by my imaging partner Marco Di Lorenzo – here
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
Holger Sierks, OSIRIS principal investigator, discusses spectacular hi res comet images returned so far by Rosetta during the Aug. 6 ESA webcast from mission control at ESOC, Darmstadt, Germany. Credit: Roland KellerESA’s Rosetta Spacecraft nears final approach to Comet 67P/Churyumov-Gerasimenko in late July 2014. This collage of imagery from Rosetta combines Navcam camera images at right taken nearing final approach from July 25 (3000 km distant) to July 31, 2014 (1327 km distant), with OSIRIS wide angle camera image at left of comet’s expanding coma cloud on July 25. Images to scale and contrast enhanced to show further detail. Credit: ESA/Rosetta/NAVCAM/OSIRIS/MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Collage/Processing: Marco Di Lorenzo/Ken Kremer
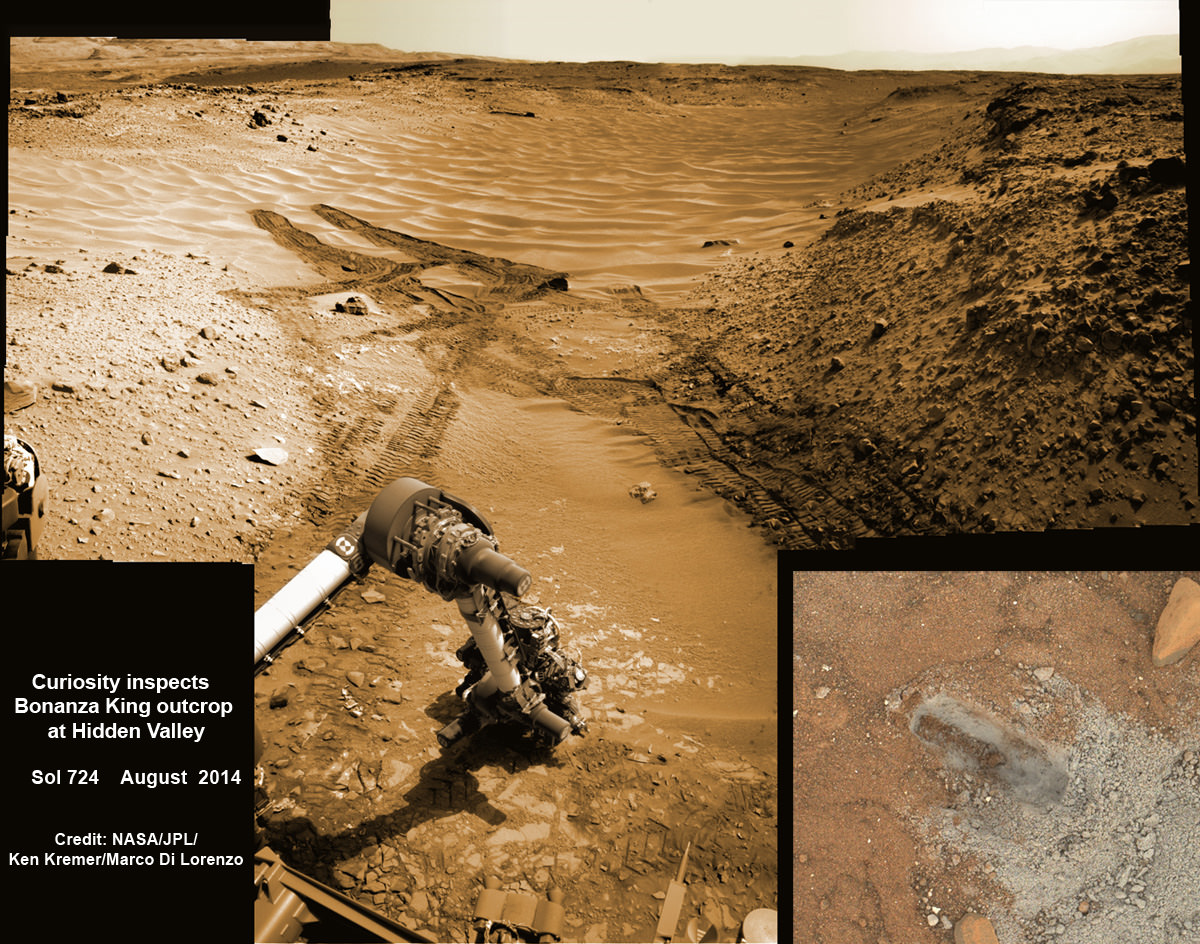
NASA’s Curiosity rover hammers into ‘Bonanza King’ rock outcrop evaluating potential as 4th drill site for sampling at ‘Hidden Valley’ in this photo mosaic view captured on Aug. 20, 2014, Sol 724. Inset MAHLI camera image at right shows resulting rock indentation that caused it to budge and be unsafe for further drilling. Note the background of treacherous sand dune ripples and deep wheel tracks inside Hidden Valley that forced quick exit to alternate route forward. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/MSSS/Ken Kremer-kenkremer.com/Marco Di Lorenzo
NASA’s Curiosity rover will skip drilling into a possible 4th rock target and instead resume the trek to Mount Sharp after finding it was unfortunately a slippery rock at the edge of a Martian valley of slippery sands and was therefore too risky to proceed with deep drilling and interior sampling for chemical analysis.
After pounding into the “Bonanza King” rock outcrop on Wednesday, Aug. 20, to evaluate its potential as Curiosity’s 4th drill target on Mars and seeing that it moved on impact, the team decided it was not even safe enough to continue with the preliminary ‘mini-drill’ operation that day.
So they cancelled the entire drill campaign at “Bonanza King” and decided to set the rover loose to drive onwards to her mountain climbing destination.
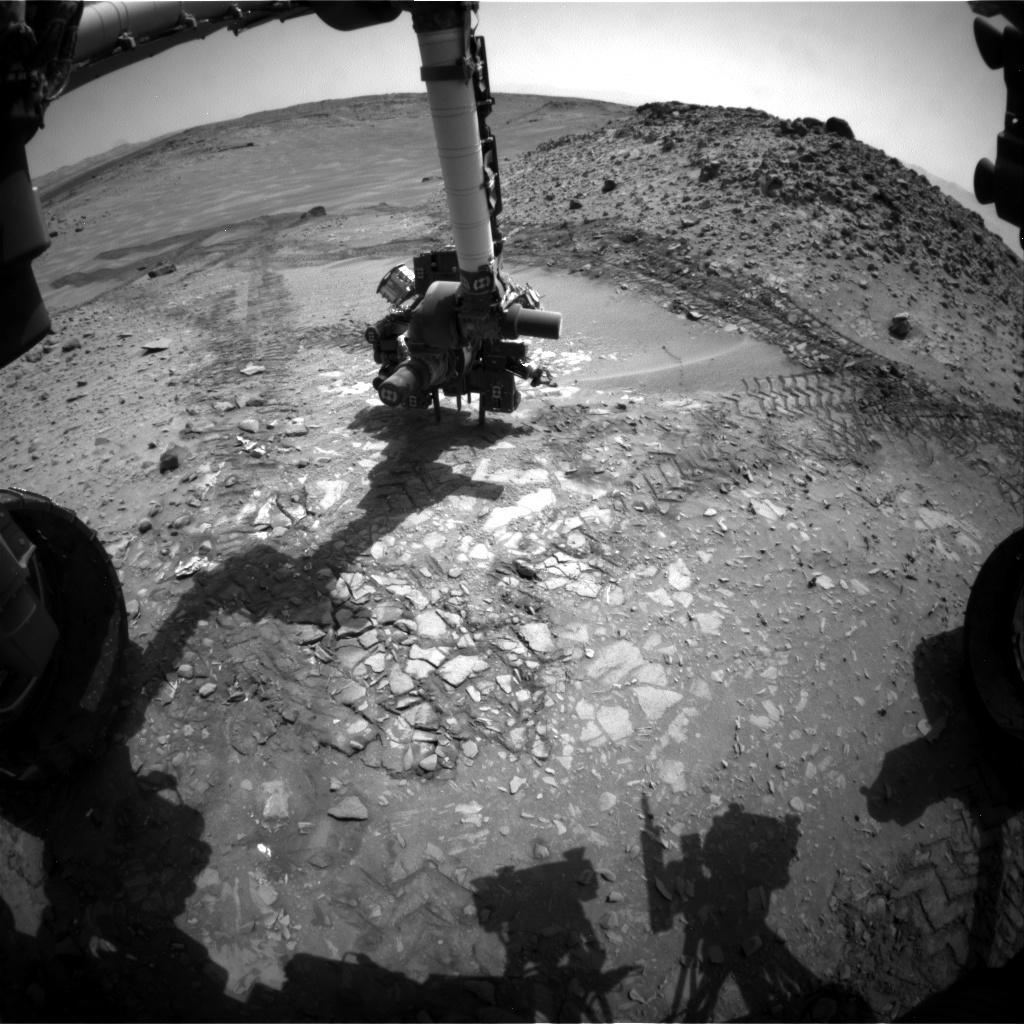
This image from the front Hazcam on NASA’s Curiosity Mars rover shows the rover’s drill in place during a test of whether the rock beneath it, “Bonanza King,” would be an acceptable target for drilling to collect a sample. Subsequent analysis showed the rock budged during the Aug. 19, 2014, test. Credit: NASA/JPL-Caltech
“We have decided that the rocks under consideration for drilling, based on the tests we did, are not good candidates for drilling,” said Curiosity Project Manager Jim Erickson of NASA’s Jet Propulsion Laboratory, Pasadena, California, in a statement.
“Instead of drilling here, we will resume driving toward Mount Sharp.”
Bonanza King was an enticing target because the outcrop possessed thin, white, cross-cutting mineral veins which could indicate that liquid water flowed here in the distant past. Water is a prerequisite for life as we know it.
Loose, unstable rocks pose a prospective hazard to the 1 ton robots hardware and health if they become dislodged during impact by the percussive drill located at the end of the robotic arm.
It’s worth recalling that whirling rocks during the nailbiting Red Planet touchdown two years ago on Aug. 6, 2012, inside Gale Crater are suspected to have slightly damaged Curiosity’s REMS meteorological instrument station.
Each drill target must pass a series of tests. And the prior three at more extensive outcrops all met those criteria. By comparison, imagery showed Bonanza King was clearly part of a much smaller outcrop. See our Bonanza King photo mosaics herein.
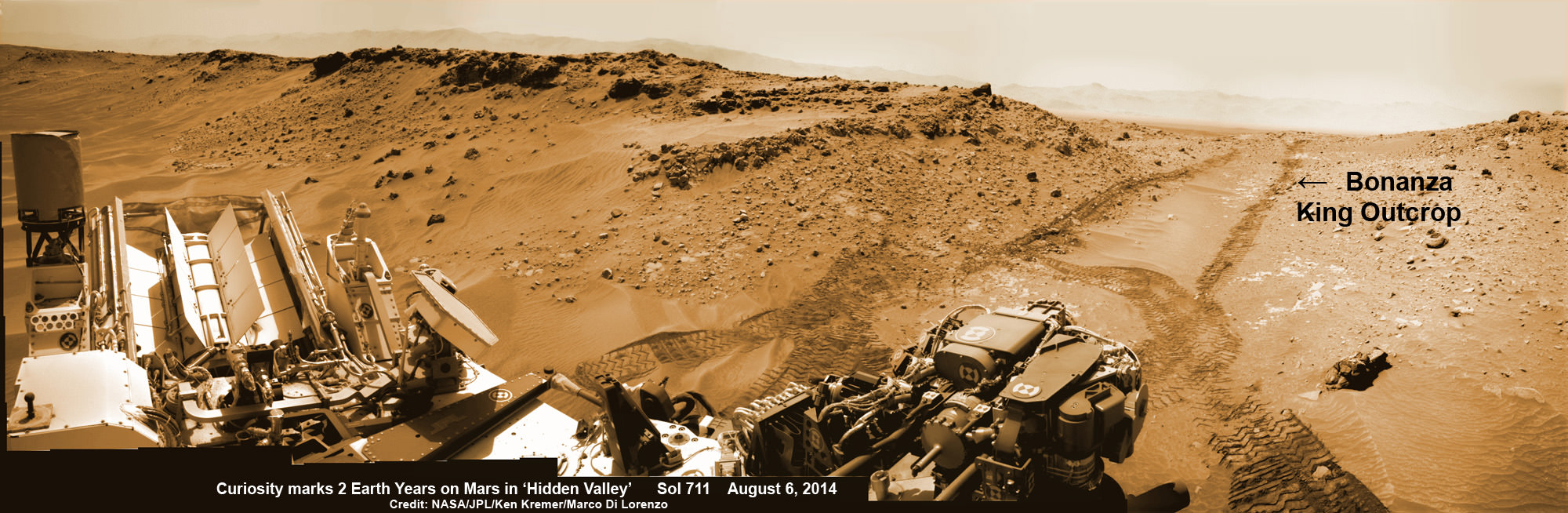
NASA’s Curiosity rover looks back to ramp with potential 4th drill site target at ‘Bonanza King’ rock outcrop in ‘Hidden Valley’ in this photo mosaic view captured on Aug. 6, 2014, Sol 711. Inset shows results of brushing on Aug. 17, Sol 722, that revealed gray patch beneath red dust. Note the rover’s partial selfie, valley walls, deep wheel tracks in the sand dunes and distant rim of Gale crater beyond the ramp. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer-kenkremer.com/Marco Di Lorenzo
“One step in the procedure, called “start hole,” uses the hammering action of the percussive drill to create a small indentation in the rock. During this part of the test, the rock moved slightly, the rover sensed that instability in the target, and protective software properly halted the procedure,” according to a NASA statement.
This pale, flat Martian rock thus failed to pass the team’s safety criteria for drilling when it budged.
Bonanza King sits in an bright outcrop on the low ramp at the northeastern end of a spot leading in and out of an area called “Hidden Valley” which lies between Curiosity’s August 2012 landing site in Gale Crater and her ultimate destinations on Mount Sharp which dominates the center of the crater.
Just days ago, the rover team commanded a quick exit from “Hidden Valley” to backtrack out of the dune filled valley because of fears the six wheeled robot could get stuck in slippery sands extending the length of a football field.
“Hidden Valley” looked like it could turn into “Death Valley.”
As Curiosity tested the outcrop, the rover team was simultaneously searching for an alternate safe path forward to the sedimentary layers of Mount Sharp because she arrived at Hidden Valley after recently driving over a field of sharp edged rocks in the “Zabriskie Plateau” that caused further rips and tears in the already damaged 20 inch diameter aluminum wheels.
It will take a route skirting the north side of the sandy-floored valley taking care to steer away from the pointiest rocks. Curiosity rover looks back to the rocky plains of the Zabriskie plateau from sandy ramp into ‘Hidden Valley’ with 4th drill site target at ‘Bonanza King’ rock outcrop as shown in this photo mosaic view captured on Aug. 14, 2014, Sol 719. Sharp edged rocks at Zabriskie tore new holes into rover wheels. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer-kenkremer.com
“After further analysis of the sand, Hidden Valley does not appear to be navigable with the desired degree of confidence,” Erickson said. “We will use a route avoiding the worst of the sharp rocks as we drive slightly to the north of Hidden Valley.”
To date, Curiosity’s odometer totals over 5.5 miles (9.0 kilometers) since landing inside Gale Crater on Mars in August 2012. She has taken over 179,000 images.
Curiosity still has about another 2 miles (3 kilometers) to go to reach the entry way at a gap in the treacherous sand dunes at the foothills of Mount Sharp sometime later this year.
Hidden Valley gives a foretaste of the rippely slippery sand dune challenges lurking ahead!
Mount Sharp is a layered mountain that dominates most of Gale Crater and towers 3.4 miles (5.5 kilometers) into the Martian sky and is taller than Mount Rainier.
“Getting to Mount Sharp is the next big step for Curiosity and we expect that in the Fall of this year,” Dr. Jim Green, NASA’s Director of Planetary Sciences at NASA Headquarters, Washington, DC, told me in an interview marking the 2nd anniversary since touchdown on Aug. 6.
“Drilling on the crater floor will provide needed geologic context before Curiosity climbs the mountain.”
The team may go back to its original plan to drill at the potential science destination known as “Pahrump Hills” which was changed due to the route change forced by the slippery sands in Hidden Valley.
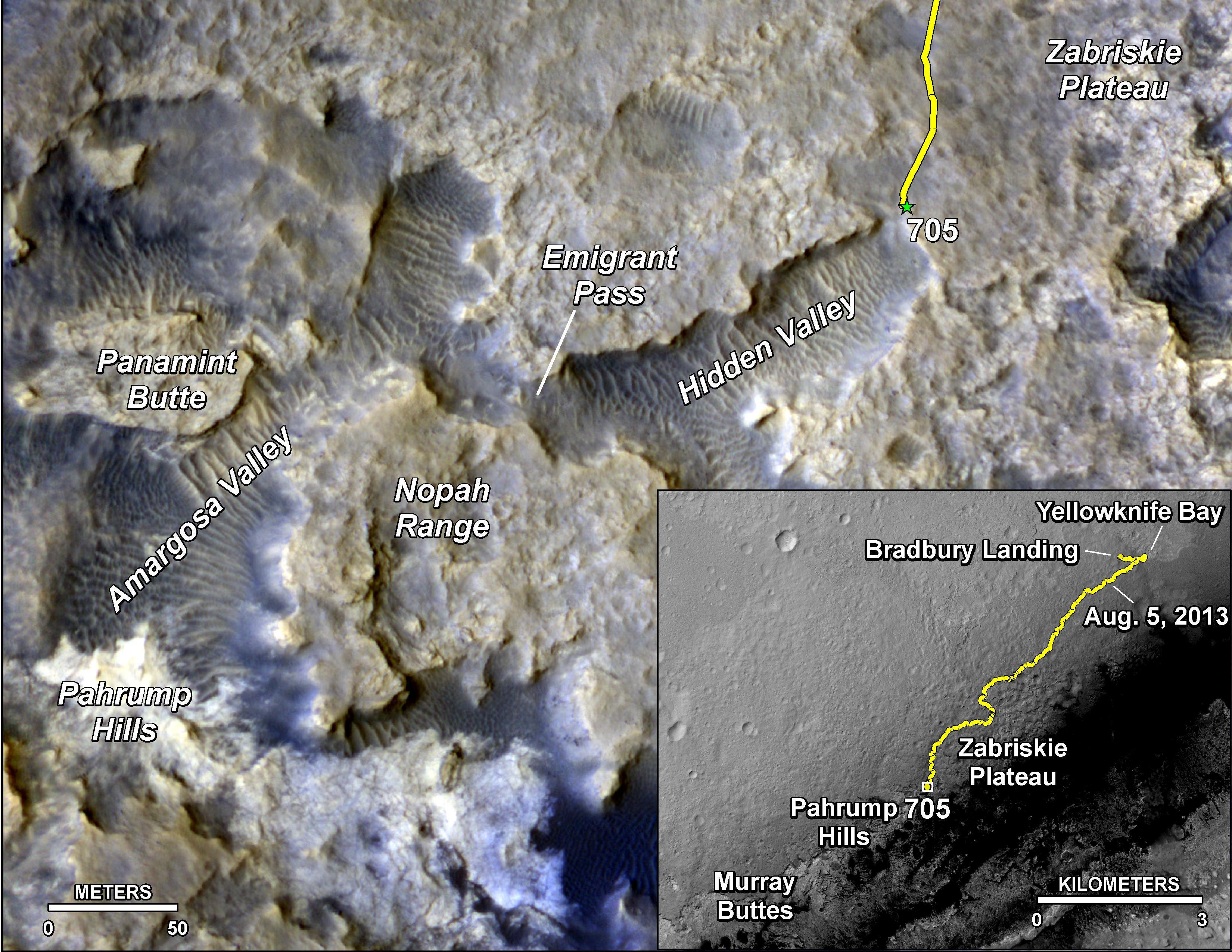
The main map here shows the assortment of landforms near the location of NASA’s Curiosity Mars rover as the rover’s second anniversary of landing on Mars nears. The gold traverse line entering from upper right ends at Curiosity’s position as of Sol 705 on Mars (July 31, 2014). The inset map shows the mission’s entire traverse from the landing on Aug. 5, 2012, PDT (Aug. 6, EDT) to Sol 705, and the remaining distance to long-term science destinations near Murray Buttes, at the base of Mount Sharp. The label “Aug. 5, 2013” indicates where Curiosity was one year after landing. Credit: NASA/JPL-Caltech/Univ. of Arizona
Read an Italian language version of this story by my imaging partner Marco Di Lorenzo – here
Stay tuned here for Ken’s continuing Rosetta, Curiosity, Opportunity, Orion, SpaceX, Boeing, Orbital Sciences, Dream Chaser, commercial space, MAVEN, MOM, Mars and more planetary and human spaceflight news.
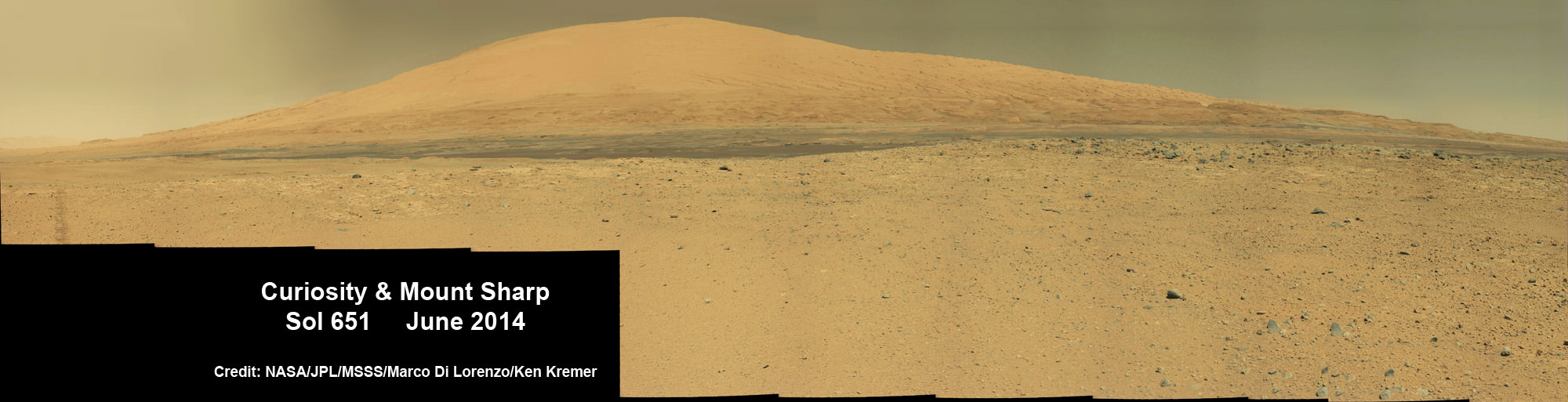
Curiosity rover panorama of Mount Sharp captured on June 6, 2014 (Sol 651) during traverse inside Gale Crater. Note rover wheel tracks at left. She will eventually ascend the mountain at the ‘Murray Buttes’ at right later this year. Assembled from Mastcam color camera raw images and stitched by Marco Di Lorenzo and Ken Kremer. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer-kenkremer.com Up close view of hole in one of rover Curiosity’s six wheels caused by recent driving over rough Martian rocks. Mosaic assembled from Mastcam raw images taken on Dec. 22, 2013 (Sol 490). Credit: NASA/JPL/MSSS/Ken Kremer – kenkremer.com/Marco Di Lorenzo
Holger Sierks, OSIRIS principal investigator, discusses spectacular hi res comet images returned so far by Rosetta during the Aug. 6 ESA webcast from mission control at ESOC, Darmstadt, Germany. Credit: Roland Keller
Animation Caption: Possible landing sites on Comet 67P/Churyumov-Gerasimenko. The model shows the illumination of the comets surface and regions under landing site consideration for the Philae lander on board ESA’s Rosetta spececraft . Credit: CNES
“The race is on” to find a safe and scientifically interesting landing site for the Philae lander piggybacked on ESA’s Rosetta spacecraft as it swoops in ever closer to the heavily cratered Comet 67P/Churyumov-Gerasimenko since arriving two weeks ago after a decade long chase of 6.4 billion kilometers (4 Billion miles).
Rosetta made history by becoming the first ever probe from Earth to orbit a comet upon arrival on Aug. 6, 2014.
The probe discovered an utterly alien and bizarre icy wanderer that science team member Mark McCaughrean, of ESA’s Science Directorate, delightedly calls a ‘Scientific Disneyland.’
“It’s just astonishing,” he said during a live ESA webcast of the Aug. 6 arrival event.
Now, another audacious and history making event is on tap – Landing on the comet!
To enable a safe landing, Rosetta is moving in closer to the comet to gather higher resolution imaging and spectroscopic data. When Rosetta arrived on Aug. 6, it was initially orbiting at a distance of about 100 km (62 miles). As of today, carefully timed thruster firings have brought it to within about 80 km distance. And it will get far closer.
Right now a top priority task for the science and engineering team leading Rosetta is “Finding a landing strip” for the Philae comet lander.
Philae’s landing on comet 67P is currently scheduled for Nov. 11, 2014. The 100 kg lander is equipped with 10 science instruments
“The challenge ahead is to map the surface and find a landing strip,” said Andrea Accomazzo, ESA Rosetta Spacecraft Operations Manager, at the Aug. 6 ESA webcast.
The team responsibility for choosing the candidate sites comprises “the Landing Site Selection Group (LSSG), which comprises engineers and scientists from Philae’s Science, Operations and Navigation Centre (SONC) at CNES, the Lander Control Centre (LCC) at DLR, scientists representing the Philae Lander instruments, and supported by the ESA Rosetta team, which includes representatives from science, operations and flight dynamics,” according to an ESA statement.
This week the team is intensively combing through a preliminary list of 10 potential landing sites.
Over the weekend they will whittle the list down to five candidate landing sites for continued detailed analysis.
ESA will announce the Top 5 landing site candidates on Monday, Aug. 25.
Where will Philae land?
This image of comet 67P/Churyumov-Gerasimenko shows the diversity of surface structures on the comet’s nucleus. It was taken by the Rosetta spacecraft’s OSIRIS narrow-angle camera on August 7, 2014. At the time, the spacecraft was 65 miles (104 kilometers) away from the 2.5 mile (4 kilometer) wide nucleus. Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA/Enhanced processing Marco Di Lorenzo/Ken Kremer
The decision rests on the results of Rosetta’s ongoing global mapping campaign, including high resolution imaging from the OSIRIS and NAVCAM cameras and further observations from the other science instruments, especially MIRO, VIRTIS, ALICE, GIADA and ROSINA.
The surface criteria for a suitable landing site include day time landing illumination, a balance between day and night to allow the solar panels to recharge the batteries, avoiding steep slopes, large boulders and deep crevasses so it doesn’t topple over.
Of course the team also must consider the comet’s rotation period (12.4 hours) and axis of rotation (see animation at top). Sites near the equator offering roughly equal periods of day and night may be preferred.
The selection of the primary landing site is slated for mid-October after consultation between ESA and the lander team on a “Go/No Go” decision.
The three-legged lander will fire two harpoons and use ice screws to anchor itself to the 4 kilometer (2.5 mile) wide comet’s surface. Philae will collect stereo and panoramic images and also drill 23 centimeters into and sample its incredibly varied surface.
Artist impression of Philae on the surface of comet 67P/Churyumov-Gerasimenko. Credit: ESA/ATG medialab
Read an Italian language version of this story by my imaging partner Marco Di Lorenzo – here
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
NASA’s Curiosity rover looks back to ramp with potential 4th drill site target at ‘Bonanza King’ rock outcrop in ‘Hidden Valley’ in this photo mosaic view captured on Aug. 6, 2014, Sol 711. Inset shows results of brushing on Aug. 17, Sol 722, that revealed gray patch beneath red dust. Note the rover’s partial selfie, valley walls, deep wheel tracks in the sand dunes and distant rim of Gale crater beyond the ramp. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer-kenkremer.com/Marco Di Lorenzo
Curiosity brushes ‘Bonanza King’ drill target on Mars
NASA’s Curiosity rover looks back to ramp with 4th drill site target at ‘Bonanza King’ rock outcrop in ‘Hidden Valley’ in this photo mosaic view captured on Aug. 6, 2014, Sol 711. Inset shows results of brushing on Aug. 17, Sol 722, that revealed gray patch beneath red dust. Note the rover’s partial selfie, valley walls, deep wheel tracks in the sand dunes and distant rim of Gale crater beyond the ramp. Navcam camera raw images stitched and colorized.
Credit: NASA/JPL-Caltech/Ken Kremer-kenkremer.com/Marco Di Lorenzo[/caption]
Eagerly eyeing her next drill site on Mars, NASA’s Curiosity rover laid the groundwork by brushing the chosen rock target called ‘Bonanza King’ on Wednesday, Aug. 17, Sol 722, with the Dust Removal Tool (DRT) and collecting high resolution imagery with the Mast Camera (Mastcam) to confirm the success of the operation.
By brushing aside the reddish, more-oxidized dust scientists and engineers leading the mission observed a gray patch of less-oxidized rock material beneath that they anticipated seeing while evaluating the utility of ‘Bonanza King’ as the rover’s fourth candidate for Red Planet rock drilling and sampling.
To date, the 1-ton robot has drilled into three target rocks to collect sample powder for analysis by the rover’s onboard pair of the chemistry labs, SAM and CheMin, to analyze for the chemical ingredients that could support Martian microbes, if they ever existed.
Curiosity rover used the Dust Removal Tool on its robotic arm to brush aside reddish, more-oxidized dust, revealing a gray patch of less-oxidized rock material at a target called “Bonanza King,” visible in this image from the rover’s Mast Camera (Mastcam). Credit: NASA/JPL-Caltech/MSSS
So far everything is proceeding quite well.
The brushing activity also revealed thin, white, cross-cutting veins which is a further indication that liquid water flowed here in the distant past. Water is a prerequisite for life as we know it.
“They might be sulfate salts or another type of mineral that precipitated out of solution and filled fractures in the rock. These thin veins might be related to wider light-toned veins and features in the surrounding rock,” NASA said in a statement.
Based on these results and more from laser zapping with Curiosity’s Chemistry and Camera (ChemCam) instrument on Sol 719 (Aug. 14, 2014) the team decided to proceed ahead.
The imminent next step is to bore a shallow test hole into the brushed area which measures about about 2.5 inches (6 centimeters) across.
If all goes well with the “mini-drill” operation, the team will proceed quickly with full depth drilling to core a sample from the interior of the dinner plate sized rock slab for delivery to Curiosity’s two chemistry labs.
Bonanza King sits in a bright outcrop on the low ramp at the northeastern end of a spot leading in and out of an area called “Hidden Valley” which lies between Curiosity’s August 2012 landing site in Gale Crater and her ultimate destinations on Mount Sharp which dominates the center of the crater.
Just days ago, the rover team commanded a quick exit from “Hidden Valley” to backtrack out of the dune filled valley because of fears the six wheeled robot could get stuck in slippery sands extending the length of a football field.
As Curiosity drills, the rover team is also searching for an alternate safe path forward to the sedimentary layers of Mount Sharp.
To date, Curiosity’s odometer totals over 5.5 miles (9.0 kilometers) since landing inside Gale Crater on Mars in August 2012. She has taken over 178,000 images.
The main map here shows the assortment of landforms near the location of NASA’s Curiosity Mars rover as the rover’s second anniversary of landing on Mars nears. The gold traverse line entering from upper right ends at Curiosity’s position as of Sol 705 on Mars (July 31, 2014). The inset map shows the mission’s entire traverse from the landing on Aug. 5, 2012, PDT (Aug. 6, EDT) to Sol 705, and the remaining distance to long-term science destinations near Murray Buttes, at the base of Mount Sharp. The label “Aug. 5, 2013” indicates where Curiosity was one year after landing. Credit: NASA/JPL-Caltech/Univ. of Arizona
Curiosity still has about another 2 miles (3 kilometers) to go to reach the entry way at a gap in the treacherous sand dunes at the foothills of Mount Sharp sometime later this year.
Mount Sharp is a layered mountain that dominates most of Gale Crater and towers 3.4 miles (5.5 kilometers) into the Martian sky and is taller than Mount Rainier.
“Getting to Mount Sharp is the next big step for Curiosity and we expect that in the Fall of this year,” Dr. Jim Green, NASA’s Director of Planetary Sciences at NASA Headquarters, Washington, DC, told me in an interview making the 2nd anniversary on Aug. 6.
“Drilling on the crater floor will provide needed geologic context before Curiosity climbs the mountain.”
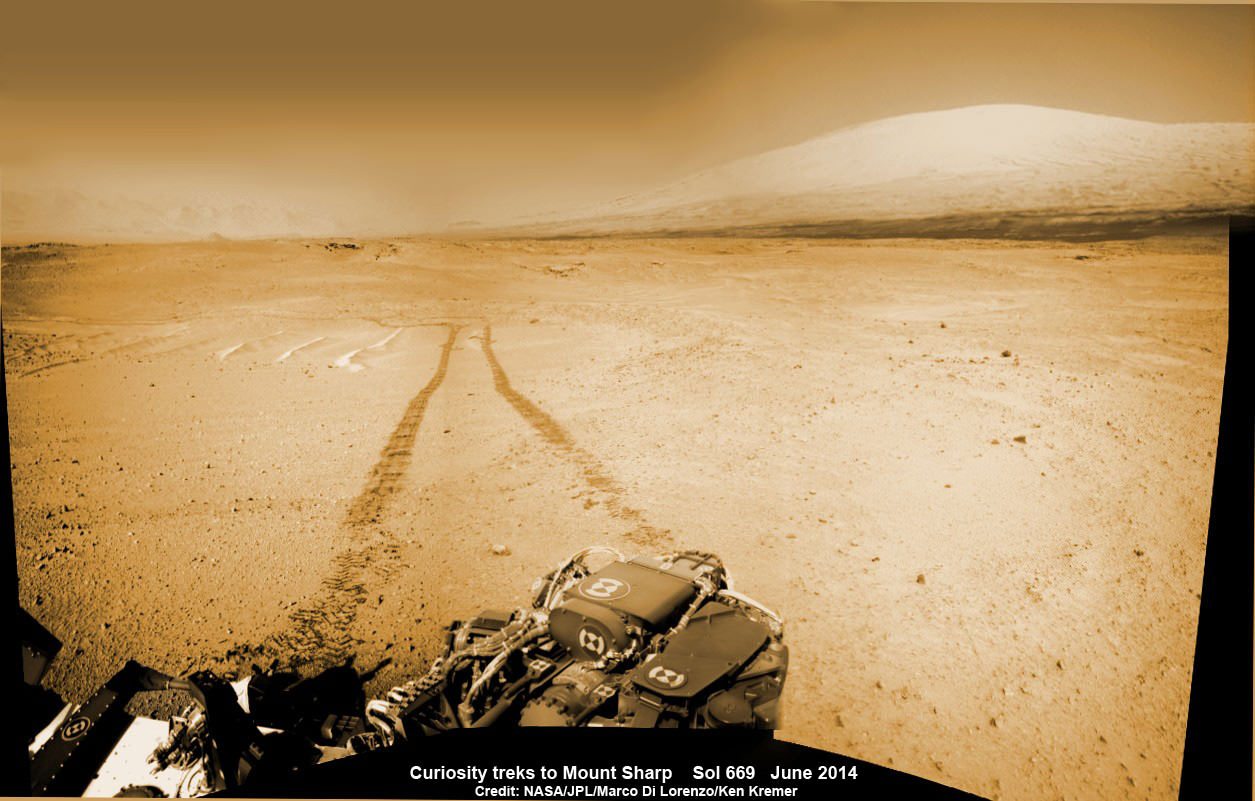
1 Martian Year on Mars! Curiosity treks to Mount Sharp in this photo mosaic view captured on Sol 669, June 24, 2014. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer – kenkremer.com
Read an Italian language version of this story by my imaging partner Marco Di Lorenzo – here
Stay tuned here for Ken’s continuing Rosetta, Curiosity, Opportunity, Orion, SpaceX, Boeing, Orbital Sciences, Dream Chaser, commercial space, MAVEN, MOM, Mars and more planetary and human spaceflight news.
NASA’s Curiosity rover looks back to ramp with 4th drill site target at ‘Bonanza King’ rock outcrop in ‘Hidden Valley’ at site marking her 2nd anniversary on Mars, as shown in this photo mosaic view captured on Aug. 6, 2014, Sol 711. Note the rover’s partial selfie, valley walls, deep wheel tracks in the sand dunes and distant rim of Gale crater beyond the ramp. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer-kenkremer.com/Marco Di Lorenzo
NASA’s Curiosity rover looks back to ramp with 4th drill site target at ‘Bonanza King’ rock outcrop in ‘Hidden Valley’ at site marking her 2nd anniversary on Mars, as shown in this photo mosaic view captured on Aug. 6, 2014, Sol 711. Note the rover’s partial selfie, valley walls, deep wheel tracks in the sand dunes and distant rim of Gale crater beyond the ramp. Navcam camera raw images stitched and colorized.
Credit: NASA/JPL-Caltech/Ken Kremer-kenkremer.com/Marco Di Lorenzo[/caption]
Not wanting to get stuck in a rut, Curiosity’s handlers have commanded NASA’s SUV-sized rover to reverse course and drive out of a potentially hazardous Martian valley of slippery sand with poor wheel traction and instead backtrack towards an enticing nearby spot that the team feels could be the fourth candidate for rock drilling – and thereby widen the scope of the story of habitable environments on the Red Planet.
The new drilling target under up close evaluation right now is named ‘Bonanza King’ – shown in our photo mosaic above.
Bonanza King was chosen after the six wheeled rover unexpectedly experienced significant wheel slippage in the past week while driving over an extended dune field of sandy ripples that basically stopped forward movement inside the Martian valley.
The team was thus in a quandary over whether to push forward on a route through the loose sands of “Hidden Valley” and possibly risk getting mired in a hidden sand trap or drive backwards over a field of sharp rocks on the “Zabriskie plateau” and beyond that are certain to tear further holes in the wheels.
Drilling Candidate Site ‘Bonanza King’ on Mars. This image from the Mast Camera (Mastcam) on NASA’s Curiosity Mars rover shows a portion of the pale rock outcrop that includes the “Bonanza King” target chosen for evaluation as the mission’s fourth rock-drilling site. Raised ridges on the flat rocks — possible mineral veins — are visible at upper and middle right. Tread marks from one of Curiosity’s wheels are visible in the lower half of the image from Sol 707, Aug. 12, 2014. Credit: NASA/JPL-Caltech/MSSS
As reported here last week on the occasion of her 2nd anniversary on Mars since the dramatic touchdown inside Gale Crater on Aug. 6, 2012, Curiosity had been driving merrily through the supposed safe valley of sandy ripples of “Hidden Valley.” She was approaching a bedrock unit named “Pahrump Hills” that for the first time is actually part of the humongous mountain named Mount Sharp she will soon scale and which is the primary science destination of the mission.
But rather soon after driving over a low hump from Zabriskie plateau (see our mosaic below) into Hidden Valley, the robot experienced wheel slippage in the ripples of sand filling the crater floor which was much higher than anticipated. And even worse than comparable test drives in a practice sand lot at JPL.
Curiosity rover looks back to the rocky plains of the Zabriskie plateau from sandy ramp into ‘Hidden Valley’ with 4th drill site target at ‘Bonanza King’ rock outcrop as shown in this photo mosaic view captured on Aug. 14, 2014, Sol 719. Sharp edged rocks at Zabriskie tore new holes into rover wheels. Navcam camera raw images stitched and colorized.
Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer-kenkremer.com
The sandy ripples extend out to the sloping valley walls with no end in sight.
“We need to gain a better understanding of the interaction between the wheels and Martian sand ripples, and Hidden Valley is not a good location for experimenting,” said Curiosity Project Manager Jim Erickson of NASA’s Jet Propulsion Laboratory in Pasadena, California, in a statement.
And since Hidden Valley is as long as a football field and has only two navigable exits at the northeastern and southwestern ends (see map below), the team was forced to drive back to the entrance way at the northern end to consider an alternative route forward to the base of Mount Sharp.
In the meantime while they evaluate the way forward, the team decided that Bonanza King offers similar science to what scientists anticipate at the outcrops at “Pahrump Hills”- a preview of a geological unit that is part of the base of Mount Sharp for the first time since landing rather than still belonging to the floor of Gale Crater.
“Geologically speaking, we can tie the Bonanza King rocks to those at Pahrump Hills. Studying them here will give us a head start in understanding how they fit into the bigger picture of Gale Crater and Mount Sharp,” said Curiosity Deputy Project Scientist Ashwin Vasavada of JPL, in a statement.
Bonanza King sits in an bright outcrop on the low ramp leading in and out of Hidden Valley.
Curiosity rover up close view of ‘Bonanza King’ rock outcrop and 4th drill target looking down from ramp and back into ‘Hidden Valley’ and hazardous dune field of sandy ripples on Aug. 14, 2014, Sol 719. Wheel tracks show where Curiosity drove into the valley, and back out again, earlier in August 2014. The largest of the individual flat rocks in the foreground are a few inches (several centimeters) across. Hazcam camera raw image flattened and colorized. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer – kenkremer.com
It looks like a pale paving stone. Since its location within the geological layers visible on the ramp is similar to what was expected at the Pahrump Hills outcrop, it’s very appealing to the science team.
Furthermore when one of the rovers wheel’s drove over the outcrop, it cracked open one of the rocks and exposed bright interior material, possibly from mineral veins – which is super exciting from a science perspective as a potential marker for flowing liquid water.
Right now the team is collecting spectral data with the science instruments to assess its science utility and is planning a super fast drilling campaign, far shorter than the prior three.
The plan would be to core a sample from the interior of the dinner plate sized rock slab for delivery to Curiosity’s pair of the onboard chemistry labs, SAM and CheMin to analyze for the chemical ingredients to support miartin microbes, if they ever existed.
“This outcrop on the ramp is too appealing to pass up,” Vasavada said.
The main map here shows the assortment of landforms near the location of NASA’s Curiosity Mars rover as the rover’s second anniversary of landing on Mars nears. The gold traverse line entering from upper right ends at Curiosity’s position as of Sol 705 on Mars (July 31, 2014). The inset map shows the mission’s entire traverse from the landing on Aug. 5, 2012, PDT (Aug. 6, EDT) to Sol 705, and the remaining distance to long-term science destinations near Murray Buttes, at the base of Mount Sharp. The label “Aug. 5, 2013” indicates where Curiosity was one year after landing. Credit: NASA/JPL-Caltech/Univ. of Arizona
To date, Curiosity’s odometer totals over 5.5 miles (9.0 kilometers) since landing inside Gale Crater on Mars in August 2012. She has taken over 178,000 images.
Curiosity still has about another 2 miles (3 kilometers) to go to reach the entry way at a gap in the treacherous sand dunes at the foothills of Mount Sharp sometime later this year.
Mount Sharp is a layered mountain that dominates most of Gale Crater and towers 3.4 miles (5.5 kilometers) into the Martian sky and is taller than Mount Rainier.
“Getting to Mount Sharp is the next big step for Curiosity and we expect that in the Fall of this year,” Dr. Jim Green, NASA’s Director of Planetary Sciences at NASA Headquarters, Washington, DC, told me in an interview making the 2nd anniversary on Aug. 6.
Up close view of hole in one of rover Curiosity’s six wheels caused by driving over rough Martian rocks. Mosaic assembled from Mastcam raw images taken on Dec. 22, 2013 (Sol 490). Credit: NASA/JPL/MSSS/Ken Kremer – kenkremer.com/Marco Di Lorenzo
Stay tuned here for Ken’s continuing Rosetta, Curiosity, Opportunity, Orion, SpaceX, Boeing, Orbital Sciences, Dream Chaser, commercial space, MAVEN, MOM, Mars and more planetary and human spaceflight news.
1 Martian Year on Mars!
Curiosity treks to Mount Sharp in this photo mosaic view captured on Sol 669, June 24, 2014. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer – kenkremer.com2 Earth Years on Mars! NASA’s Curiosity rover celebrated the 2nd anniversary on Mars at ‘Hidden Valley’ as shown in this photo mosaic view captured on Aug. 6, 2014, Sol 711. Note the valley walls, rover tracks and distant crater rim. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer-kenkremer.com/Marco Di Lorenzo