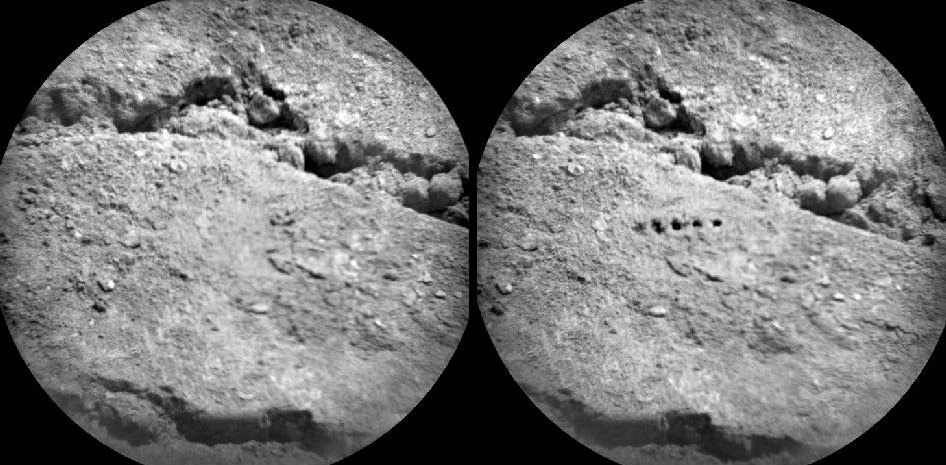
Before-and-after images from Curiosity’s ChemCam micro-imager show holes left by its million-watt laser (NASA/JPL-Caltech/LANL/CNES/IRAP/LPGN/CNRS)
PEWPEWPEWPEWPEW! Curiosity’s head-mounted ChemCam did a little target practice on August 25, blasting millimeter-sized holes in a soil sample named “Beechey” in order to acquire spectrographic data from the resulting plasma glow. The neat line of holes is called a five-by-one raster, and was made from a distance of about 11.5 feet (3.5 meters).
Sorry Obi-Wan, but Curiosity’s blaster is neither clumsy nor random!
Mounted to Curiosity’s “head”, just above its Mastcam camera “eyes”, ChemCam combines a powerful laser with a telescope and spectrometer that can analyze the light emitted by zapped materials, thereby determining with unprecedented precision what Mars is really made of.
For five billionths of a second the laser focuses a million watts of energy onto a specific point. Each of the 5 holes seen on Beechey are the result of 50 laser hits. 2 to 4 millimeters in diameter, the holes are much larger than the laser point itself, which is only .43 millimeters wide at that distance.
ChemCam’s laser allows Curiosity to zap and examine targets up to 23 feet (7 meters) away. Credit: J-L. Lacour/CEA/French Space Agency (CNES)
“ChemCam is designed to look for lighter elements such as carbon, nitrogen, and oxygen, all of which are crucial for life,” said Roger Wiens, principal investigator of the ChemCam team. “The system can provide immediate, unambiguous detection of water from frost or other sources on the surface as well as carbon – a basic building block of life as well as a possible byproduct of life. This makes the ChemCam a vital component of Curiosity’s mission.”
Visit the official ChemCam site for more information.
Image Caption: Martian Soil caked on Curiosity’s right middle and rear wheels after Sol 22 Drive. Credit: NASA/JPL-Caltech
Mars Trek has begun for NASA’s Curiosity rover. The mega rover has departed from her touchdown vicinity at “Bradbury Landing” and set off on a multi-week eastwards traverse to her first science target which the team has dubbed “Glenelg”
Glenelg lies about a quarter mile (400 meters) away and the car-sized rover drove about 52 feet (16 meters) on Tuesday, Aug 28 or Sol 22 of the mission.
The science team selected Glenelg as the first target for detailed investigation because it sits at the intersection of three types of geologic terrain, affording the researchers the chance to get a much more comprehensive look at the diversity of geology inside the Gale Crater landing site.
The Sol 22 drive was the third overall for Curiosity and the farthest so far. At this new location, some 33 feet ( 10 m) from Bradbury Landing , the Mastcam color camera is collecting high resolution images to create a 3 D map of features off in the distance that will aid the rover drivers in planning a safe traverse route.
“This drive really begins our journey toward the first major driving destination, Glenelg, and it’s nice to see some Martian soil on our wheels,” said mission manager Arthur Amador of NASA’s Jet Propulsion Laboratory in Pasadena, Calif. “The drive went beautifully, just as our rover planners designed it.”
In about a week, the science team plans to deploy the 7 ft (2.1 meter) long robotic arm and test the science instruments in the turret positioned at the terminus of the arm.
“We are on our way, though Glenelg is still many weeks away,” said Curiosity Project Scientist John Grotzinger of the California Institute of Technology in Pasadena. “We plan to stop for just a day at the location we just reached, but in the next week or so we will make a longer stop.”
Perhaps in about a year or so, Curiosity will reach the base of Mount Sharp, her ultimate destination, and begin climbing up the side of the 3.6 mile (5.5 km) high mound in search of hydrated minerals that will shed light on the duration of Mars watery past.
The goal is to determine if Mars ever had habitats capable of supporting microbial life in the past or present during the 2 year long primary mission phase. Curiosity is equipped with a sophisticated array of 10 state of the art science instruments far beyond any prior rover.
Image Caption: Curiosity Points to her ultimate drive destination – Mount Sharp – with unstowed robotic arm on Aug. 20. This navigation camera (Navcam) mosaic was assembled from images on multiple Sols. Curiosity will search for hydrated minerals using the robotic arm and a neutron detector on the body. Image stitching and processing by Ken Kremer and Marco Di Lorenzo. Featured at APOD on 27 Aug 2012. Credit: NASA/JPL-Caltech/Ken Kremer/Marco Di Lorenzo
Wow — what a view! This image, released today, is a high-resolution shot of the Curiosity rover’s ultimate goal: the stratified flanks of Gale Crater’s 3.4-mile (5.5-km) high central peak, Mount Sharp. The image was taken with Curiosity’s 100mm telephoto Mastcam as a calibration test… if views like this are what we can expect from the MSL mission, all I can say is (and I’ve said it before) GO CURIOSITY!
“This is an area on Mount Sharp where Curiosity will go,” said Mastcam principal investigator Michael Malin of Malin Space Science Systems. “Those layers are our ultimate objective. The dark dune field is between us and those layers. In front of the dark sand you see redder sand, with a different composition suggested by its different color. The rocks in the foreground show diversity — some rounded, some angular, with different histories. This is a very rich geological site to look at and eventually to drive through.”
The gravel-strewn region in the foreground is Curiosity’s immediate landing area. Then the ground dips into a low depression called a swale, then rises up again to the edge of a crater that’s rimmed with larger rocks. Quite a bit beyond that (about 2.2 miles/3.7 km away) are fields of dunes composed of darker material, and then the hummocky base of Mount Sharp itself begins to rise up about 3.4 miles (5.5 km) in the distance.
The topmost ridges of Mount Sharp visible above are actually 10 miles (16.2 km) away.
A crop of the full-size image shows a large rock at the foot of a knoll that’s about the same size as Curiosity (which is this big compared to a person and previous rovers):
The rocky mound just behind the boulder in that image is itself about 1,000 feet (300 meters) across and 300 feet (100 meters) high. Gale Crater isn’t a place for a faint-hearted rover!
The colors have been modified from the original image in order to help better discern landforms and differences in surface materials. Here, the images look more like what we’d see under natural Earthly lighting.
Curiosity already is returning more data from the Martian surface than have all of NASA’s earlier rovers combined.
“We have an international network of telecommunications relay orbiters bringing data back from Curiosity,” said JPL’s Chad Edwards, chief telecommunications engineer for NASA’s Mars Exploration Program. “Curiosity is boosting its data return by using a new capability for adjusting its transmission rate.”
“The knowledge we hope to gain from our observation and analysis of Gale Crater will tell us much about the possibility of life on Mars as well as the past and future possibilities for our own planet. Curiosity will bring benefits to Earth and inspire a new generation of scientists and explorers, as it prepares the way for a human mission in the not too distant future.”
– NASA Administrator Charles Bolden in a message transmitted to the Curiosity rover and then back to Earth, August 27, 2012
Today’s Astronomy Picture of the Day (APOD) features a mosaic put together in part by Universe Today’s Ken Kremer, along with his imaging partner Marco Di Lorenzo, using images sent back from the Curiosity rover. It shows Curiosity’s landing site, Bradbury Landing, with its ultimate destination, Aeolis Mons/Mount Sharp off in the distance. It’s a beautiful and crisp image, which show parts of the rover itself — including the extended robotic arm — and its shadow on Mars. As the APOD editors Robert Nemiroff and Jerry Bonnell say, “If life ever existed on Mars it might well have been here in Gale crater, with the Curiosity rover being humanity’s current best chance to find what remains.”
Congrats to Ken and Marco for being featured on APOD!
Images from the Curiosity rover on Mars are truly spectacular but a large mosaic from the THEMIS camera aboard NASA’s Mars Odyssey orbiter gives a grand perspective of our new foothold on Mars. Take some time to rove and explore Gale Crater.
The viewer, created using a web-imaging technology from Zoomify, is set to move between points of interest, such as Mars Science Laboratory’s landing site in Aeolis Palus, Glenelg, and Aeolis Mons/Mount Sharp itself. The layered sediments flanking Mount Sharp make it the primary target for Curiosity’s two-year mission. Take control at anytime by clicking on the image. This will stop the automatic roving and leave you in control to explore the terrain of Gale Crater. Use your mouse or the toolbar controls to pan and zoom around the image. You can also use the dropdown in the upper right to take you directly to certain points of interest in the image. Over time, we will add to this interactive feature as more geological points of interest are identified.
THEMIS stands for Thermal Emission Imaging System which is a multiband visible and infrared camera aboard Odyssey. The comprehensive mosaic is pieced together from 205 individual scenes, most taken recently but some dating to 2002 shortly after Odyssey entered Mars orbit in 2001. These images were taken before MSL landed on Mars. Even so, as large as the SUV-sized rover is, it would be too small to see in these images. The smallest details in this image are 18 meters or 60 feet across.
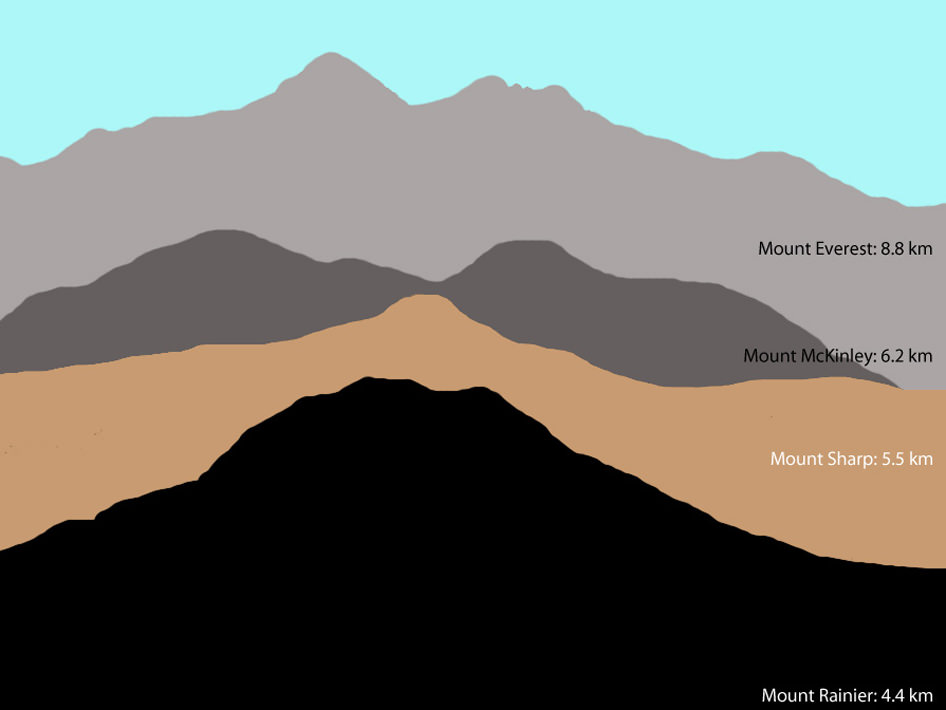
This illustration shows the size of Aoelis Mons (Mount Sharp) in comparison to three large mountains on Earth. The elevation of Mount Sharp is given in kilometers above the floor of Gale Crater. The heights of the Earth mountains are given in kilometers above sea level. Image credit: Tanya Harrison, NASA/JPL-Caltech/MSSS
Gale Crater is 154 kilometers (96 miles) wide. Near the center rises Aeolis Mons, a 5 km (3 mile) high mound of layered sediments, informally dubbed Mount Sharp, after planetary geologist Robert Sharp who died in 2004. Scientists for a time referred to the conical mountain as “The Mound.” The mountain, which would stand among the highest on Earth, cannot be seen from Earth and was unknown before planetary probes visited the Red Planet.
“The reason we decided to assemble such a large, comprehensive mosaic of Gale Crater was to give ourselves a better sense of the context around the landing site, said Jonathon Hill, a Mars research at Arizona State University who assembled the mosaic, a press release. “This will help us to better understand what Curiosity sees and measures as it roves the surface.”
Gale Crater zoom tour created by John Williams (TerraZoom) using Zoomify.
About the author:John Williams is owner of TerraZoom, a Colorado-based web development shop specializing in web mapping and online image zooms. He also writes the award-winning blog, StarryCritters, an interactive site devoted to looking at images from NASA’s Great Observatories and other sources in a different way. A former contributing editor for Final Frontier, his work has appeared in the Planetary Society Blog, Air & Space Smithsonian, Astronomy, Earth, MX Developer’s Journal, The Kansas City Star and many other newspapers and magazines.
This week, Torsten Zorn, MSL Tacticle Downlink Lead, provides an video update on the Curiosity rover’s activities. It’s been a week of firsts — flexing the rover’s robotic arm, zapping with its laser and giving the roving wheels their first workout. The video provides a great look at the rover’s landing site, named for author Ray Bradbury on the day that would have been his 92nd birthday.
Bradbury Landing color panorama. Credit: NASA/JPL-Caltech/Malin Space Science Systems. with image editing by James Canvin.
The image editing wizards at UnmannedSpaceflight are having a field day with all the sensational views being sent back by the Curiosity rover. Above is a beautiful color 360-degree panoramic view edited by James Canvin of the newly named “Bradbury Landing,” Curiosity’s landing place. The view of Aeolis Mons (Mount Sharp) is simply stunning, along with parts of (and shadows of) the rover itself. Click on the image to have access to larger views. James said he added the latest downloads from Curiosity in order to show the top of Aeolis Mons, and extended the sky to make the view complete.
See more views, below:
Aeolis Mons/Mount Sharp. Credit: NASA/JPL-Caltech/image editing by Stuart Atkinson
Here’s a view focusing on just Aeolis Mons by Stuart Atkinson at his wonderful Gale Gazette website, which highlights Curiosity’s latest explorations. He said he “boosted” the colors “just a bit, to bring out some detail.” Click on any of these images to see larger versions from Stu to see more detail — one could spend hours looking at the all the features! And presumably, the MSL science team is doing just that!
And there’s more detail from another image enhanced by Stu, a closeup of one part of the huge mountain in the center of Gale Crater, Curiosity’s ultimate destination for exploration:
The “Promised Land” at the base of Aeolis Mons. Credit: NASA/JPL-Caltech/image editing by Stuart Atkinson
Just look at this intriguing area of mesas and buttes that Curiosity will one day, hopefully be able to explore!
A view of Curiosity and the first tracks left by this rover on Mars. Credit: NASA/JPL-Caltech.
Now it’s time to grab your 3-D glasses to appreciate a the great view from Curiosity!
3-D view of Curiosity’s tracks. NASA/JPL-Caltech/image editing by Stuart Atkinson
3-D view of wheel tracks left by the Curiosity rover on Mars, as captured by the rover’s hazard avoidance cameras. Credit: NASA/JPL-Caltech/Stuart Atkinson
Thanks to Stuart and James and all the UnmannedSpaceflight image editing wizards for providing us all a better appreciation of the location and views from Curiosity’s new science spot. We look forward to more images as they become available! You can see all the raw images straight from Curiosity here.
This video provides a step-by-step explanation of the choreography needed to land NASA’s Curiosity rover on Mars. It starts with a computer simulation from NASA’s Eyes on the Solar System program and uses actual images from Curiosity’s Mars Descent Imager. It ends with a high-resolution color image from Curiosity’s Mast Camera. Entry, Descent and Landing team leader Adam Steltzner provides the play-by-play commentary.
Adam Steltzner and another Curiosity team member celebrate the successful landing. Credit: NASA/Bill Ingalls.
I admit, I’ve lost count of how many times I’ve watched the great “trailer” JPL put out showing the events in the mission control room during the Entry, Descent and Landing of the Curiosity rover, which also simultaneously provides animations of what took place on Mars. Watching it usually evokes either 1.) a fist pump, or 2.) choking up.
But if you’ve seen the video, or if you were watching live the night of the landing, just what were all those acronyms and phrases being thrown around and what did they mean? And what was the ever-pacing Adam Steltzner (EDL team leader) hearing in his headphones that made him stop, turn around and point just before spacecraft communicator Allen Chen said, “Touchdown confirmed!” … wherein bedlam ensued?
JPL has put out some info about what all was going on behind the scenes. It turns out the words “UHF Strong,” were highly anticipated by the team, plus there was a bit of acronym trickery employed by the team just so there wasn’t any doubt among them what was going on.
There had been a debate among Curiosity’s ELD team about what their first words to indicate that the rover had reached the surface should be. They knew their microphones would be “hot” and that NASA TV was beaming the landing event out live to everyone watching.*
But they also knew that landing safely on Mars meant more than simply landing on Mars – which any one of the 34 engineers present at JPL’s Building 264 Room 230, also known as the “EDL War Room,” will tell you at great length is not simple at all. Their rocket-propelled backpack and rover-lowering Sky Crane system were getting their first all-up test 154 million miles (248 million kilometers) away from home, and there was still plenty that could go wrong even after the rover was gently placed on the surface… plenty.
What if the descent stage kept descending right on top of the rover? What if the bridles connecting the two did not separate? What if the algorithm used to throttle up the engines for the flyaway maneuver was not accurate?
It was the remaining “what ifs” that made what those first words from Mars confirming the rover was on the surface so important.
“If we said ‘touchdown,’ then people not intimately familiar with EDL might infer that Curiosity was good to go,” said engineer Steve Sell. “But two more major calls had to be made before I could begin to breathe again.”
At 10:31:45 p.m. PDT, Jody Davis saw the event record, or EVR, she was looking for appear on her computer screen in the EDL War Room. She knew that the “Touchdown” EVR would only be beamed down if the rover’s descent stage had throttled down — a result which could only occur if the descent stage had offloaded half its weight. The only way the rover could offload half its weight in an instant is if it were being held up from below.
Davis, a member of the EDL team and an engineer from NASA Langley Research Center in Virginia, gave the much reviewed, pre-scripted call — “Tango Delta nominal.”
Tango and Delta are phonetic identifiers for T and D, which the team used to represent touchdown.
One down, two to go, thought Sell. The next call the EDL team was looking for was “RIMU Stable.”
“RIMU stands for Rover Inertial Measurement Unit,” said Sell. “The RIMU gives us the rover’s orientation as well as any movement it is making. If we landed on a crumbling crater wall or an unstable sand dune, or were being dragged by a still-connected descent stage across the surface, then the RIMU would show that in its data set.”
The War Room’s David Way, an engineer from JPL, was monitoring that unit’s performance. Eight long seconds after Jody’s call, he found the EVR he was looking for.
“RIMU Stable,” said Way.
One more crucial milestone to go.
This image shows Curiosity’s Entry, Descent and Landing (EDL) “war room” and its staff. On the night of Aug. 5, 2012 PDT (early morning Aug. 6 EDT), 34 engineers gathered in this room at NASA’s Jet Propulsion Laboratory, Pasadena, Calif., to support the landing. Image credit: NASA/JPL-Caltech
Not receiving that one final call would be something of a long shot to be sure. After all, the rover was down on the ground, and RIMU indicated it wasn’t moving. Their system had been proven every step of the way so far. But everyone in the EDL War Room got as far as they did not only because they were excellent engineers, but because of their predilection for concocting unappetizing entry, descent and landing scenarios – and then figuring out how to elude them. And one ton of fuel-laden, rocket-firing descent stage climbing straight up, only to fall right back down on their factory-fresh landing site and an otherwise good-to-go, roving Mars laboratory was about as unappetizing a scenario as Sell could imagine.
That final confirmation would not come from Sell’s location. The final confirmation that Curiosity had landed clean would come 200 yards and one building away from the EDL War Room. There, in the Mission Support Area of JPL’s Building 230, Adam Steltzner, the mission’s EDL phase lead, was staring across the room at Brian Schwartz, who was not making eye contact with anyone. Schwartz, the EDL communications engineer, was staring at his screen. His task was not to check for a good-news EVR from the rover. Instead, he was waiting to see if the UHF signal became intermittent, faded away or just cut out altogether – all potential indications that the rover and descent stage had not gone their separate ways.
Eight seconds after the RIMU call – Schwartz looked up.
“UHF strong,” said Schwartz.
With that, Steltzner had all the data he needed. Seated directly in front of the pacing EDL Phase Lead, Allen Chen felt a jab in the shoulder. Chen, the mission’s (capsule communicator), knew it could only mean one thing.
“Touchdown confirmed,” said Chen.
Bedlam and joy.
Mars Science Laboratory (MSL) Entry, Descent and Landing Engineer Adam Steltzner reacts after the Curiosity rover successfully landed on Mars on Sunday, Aug. 5, 2012. Photo Credit: (NASA/Bill Ingalls)
Via Twitter, Steltner told Universe Today that when you see him in the video holding up four fingers, he was actually “counting the seconds waiting for UHF confirmation from Brian Schwartz. I think my fingers were me counting down,” he said.
How did the JPL team know what was happening on Mars? — (there was a 13.8 minute radio delay because of the distance between Earth and Mars).
MSL sent out different tones for each event that happened, and 128 distinct tones indicated when steps in the process were activated; one sound indicated the parachute deployed, while another signaled that the vehicle was in powered flight, and still another that the Sky Crane had been activated. These sounds were a series of basic, special individual radio tones.
They were simple tones, transmitted in X-band, comparable to semaphore codes, rather than full telemetry. The Deep Space Network listened for these direct-to-Earth transmissions. However, Earth went out of view of the spacecraft, “setting” below the Martian horizon, partway through the descent, so the X-band tones were not available for confirming the final steps in descent and landing. By then, the bent-pipe relay of telemetry via the Odyssey spacecraft had begun.
Also listening was the Mars Express spacecraft. It recorded about 20 minutes of the rover’s transmissions and tones. ESA engineers have now put together an audio reproduction, compressing the 20 minutes into about 19 seconds of audio that humans can hear that are a “faithful reproduction of the ‘sound’ of the NASA mission’s arrival at Mars and its seven-minute plunge to the Red Planet’s surface,” the European Space Agency team wrote. You can listen to the audio here.
And if you need to watch the landing trailer one more time, here it is:
*Estimates are that at least 3.2 million people were watching online on JPL’s UStream feed. Universe Today’s Live Hangout on Air Virtual Landing Party had a total of 30,000 viewers, with a peak of 7,000 concurrent viewers. This CNET article says that at the peak, 500,000 people were simultaneously watching the live landing on NASA’s HDTV, JPL, and JPL 2 broadcasts via Ustream. While numbers like this aren’t available for TV, Mashable cites research firm Nielsen’s ratings for the night — CNN had 426,000 viewers, MSNBC had 365,000, and Fox came in the highest with 803,000 — which overall have lower numbers than Ustream.
It keeps getting better! This is a full-resolution version of the NASA Curiosity rover descent to Mars, taken by the MARDI descent imager. This video, put together by Daniel Luke Fitch, uses all but a dozen of the full resolution 1600×1200 frames (some haven’t been uploaded from the rover yet). The result is a mind-blowing, HD view of Curiosity’s view as it landed — and it also shows the best views yet of the heat shield impact. Wow!