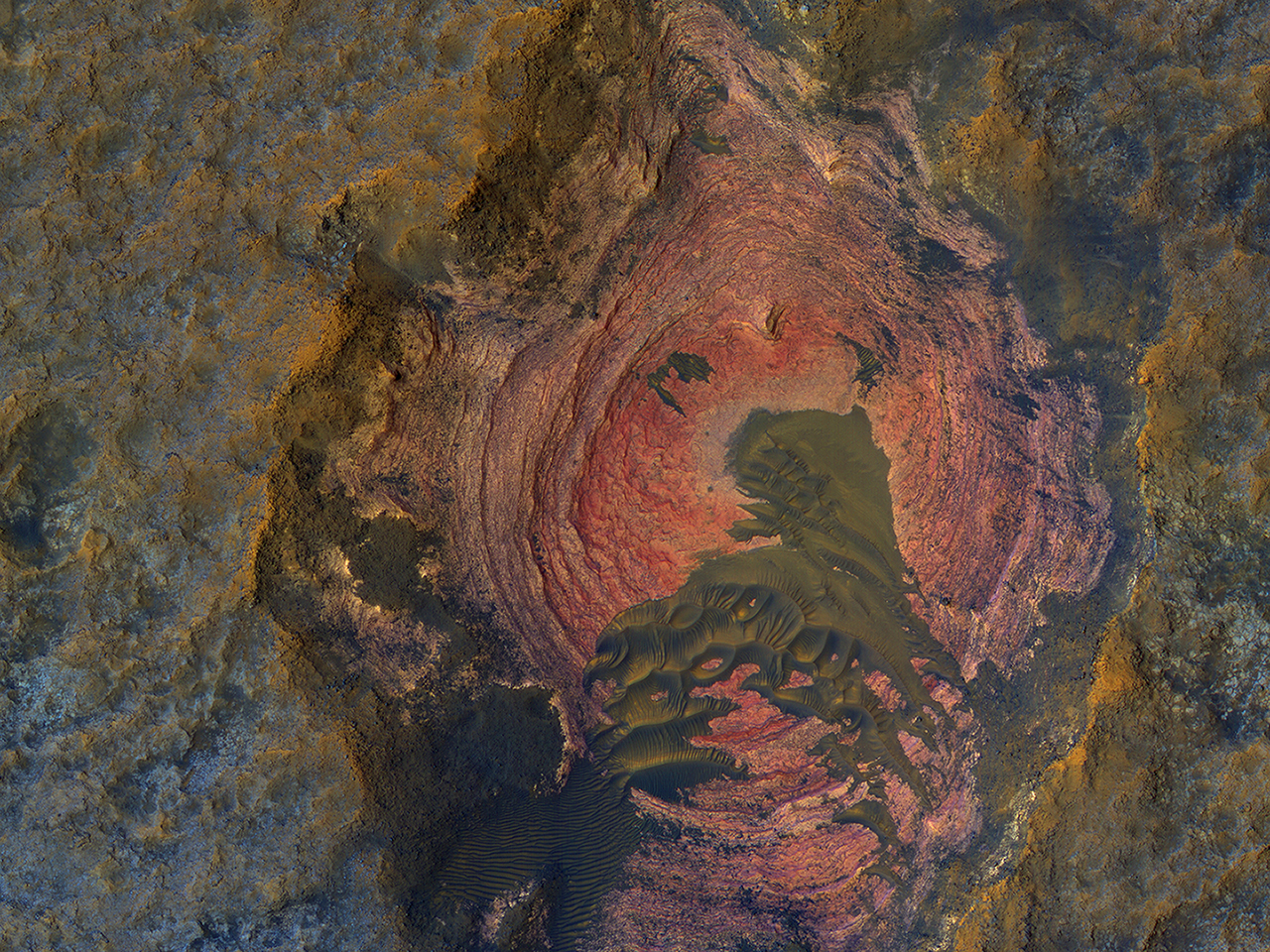
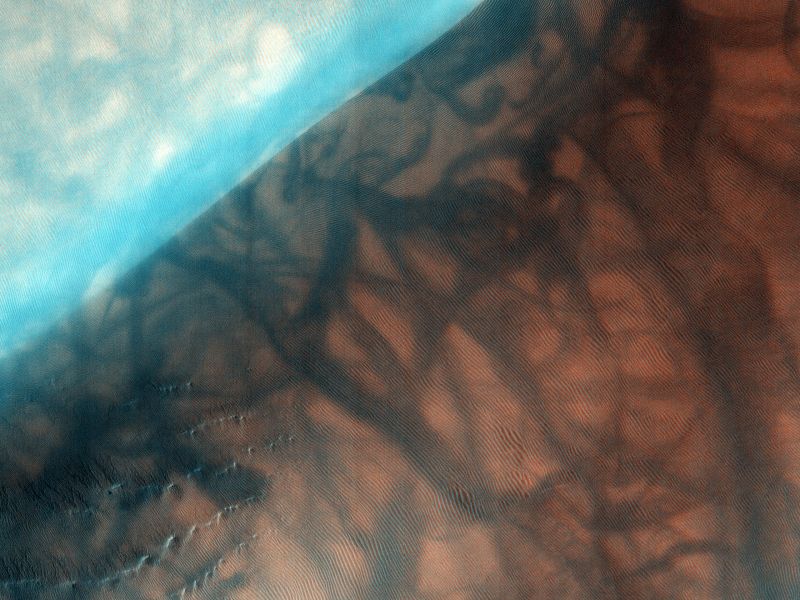
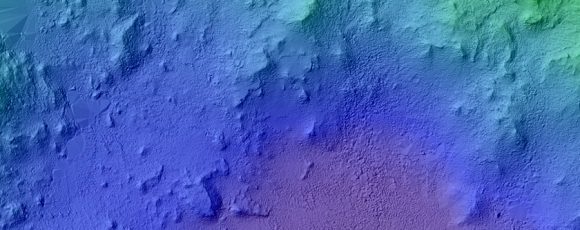
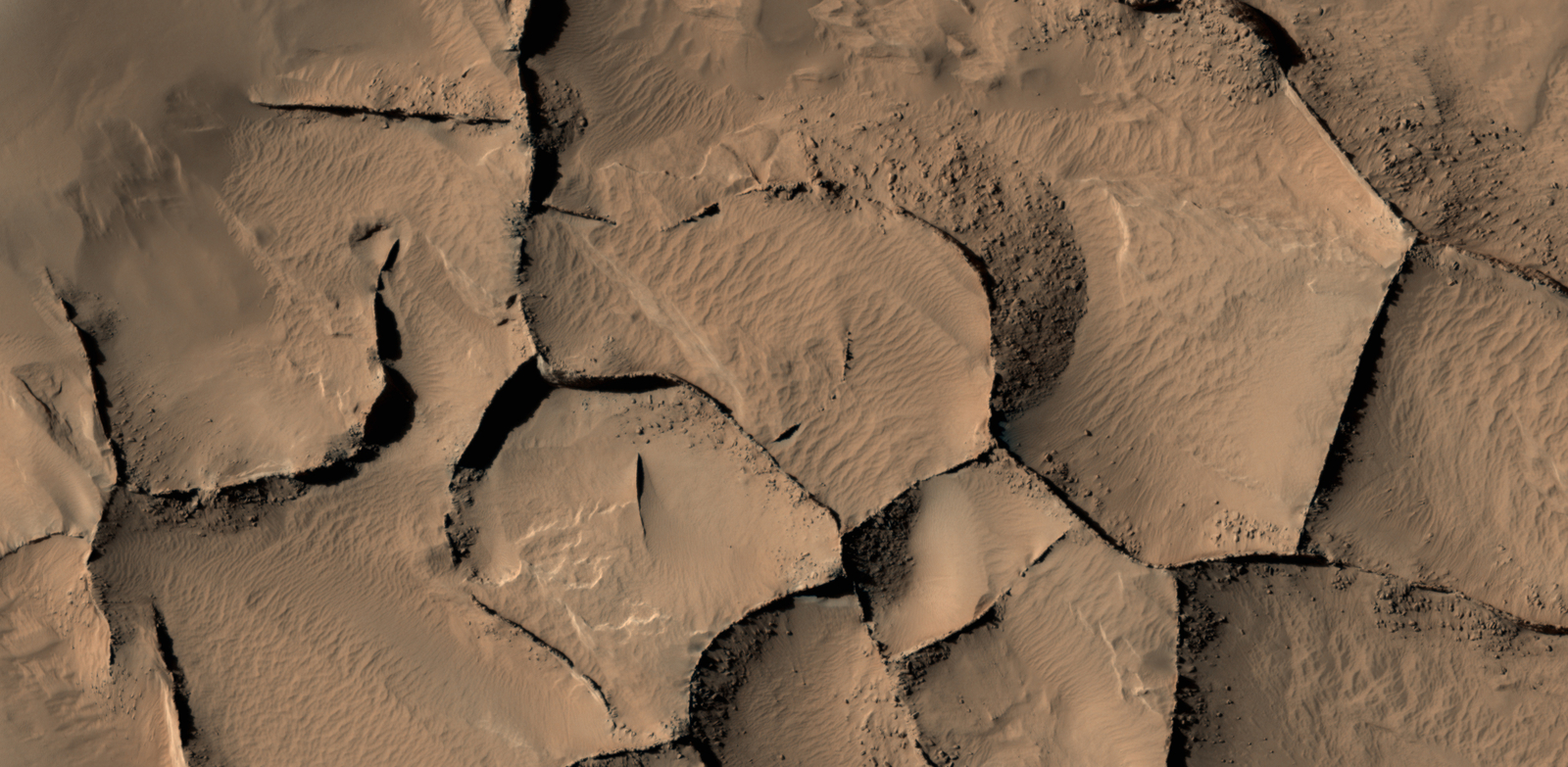
This colorful image of Martian bedrock, punctuated in the center by dunes, is courtesy of the HiRise camera aboard NASA's Mars Reconnaissance Orbiter. Image: NASA/JPL/University of Arizona
For a supposedly dead world, Mars sure provides a lot of eye candy. The High Resolution Imaging Science Experiment (HiRise) aboard NASA’s Mars Reconnaissance Orbiter (MRO) is our candy store for stunning images of Mars. Recently, HiRise gave us this stunning image (above) of colorful, layered bedrock on the surface of Mars. Notice the dunes in the center. The colors are enhanced, which makes the images more useful scientifically, but it’s still amazing.
HiRise has done it before, of course. It’s keen vision has fed us a steady stream of downright jaw-dropping images of Elon Musk’s favorite planet. Check out this image of Gale Crater taken by HiRise to celebrate its 10 year anniversary orbiting Mars. This image was captured in March 2016.
HiRise captured this image of unusual textures on the floor of the Gale Crater, the same crater where the Curiosity rover is working. Image: NASA/JPL-Caltech/Univ. of Arizona
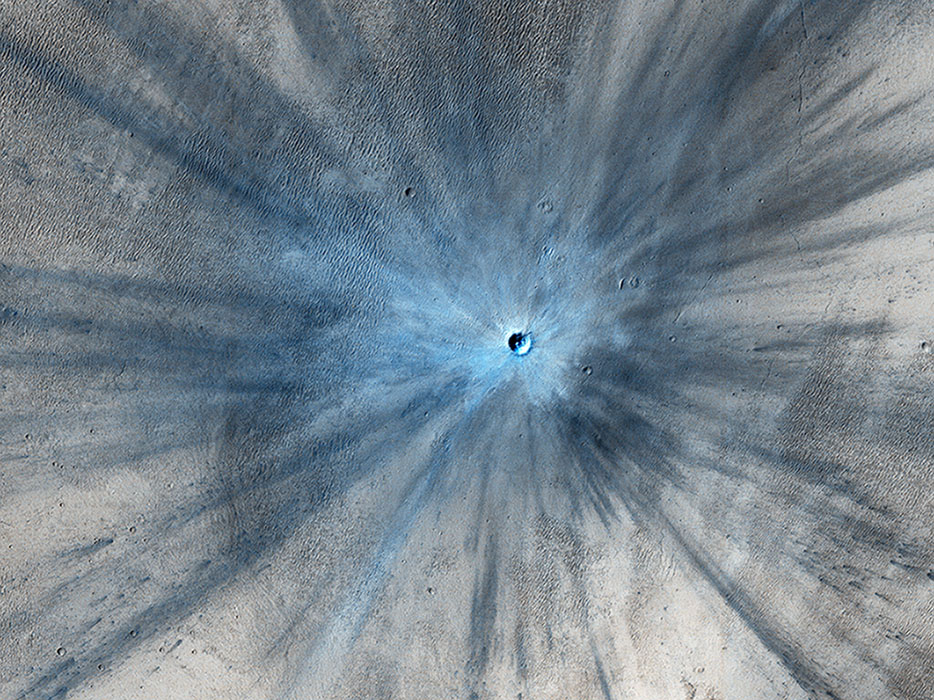
The MRO is approaching its 11 year anniversary around Mars. It has completed over 45,000 orbits and has taken over 216,000 images. The next image is of a fresh impact crater on the Martian surface that struck the planet sometime between July 2010 and May 2012. The impact was in a dusty area, and in this color-enhanced image the fresh crater looks blue because the impact removed the red dust.
This color-enhanced image of a fresh Martian crater was captured by the HiRise camera. Image: NASA/JPL-Caltech/Univ. of Arizona
These landforms on the surface of Mars are still a bit of a mystery. It’s possible that they formed in the presence of an ancient Martian ocean, or perhaps glaciers. Whatever the case, they are mesmerizing to look at.
These odd ridges are still a mystery. Were they formed by glaciers? Oceans? Image: NASA/JPL-Caltech/Univ. of Arizona
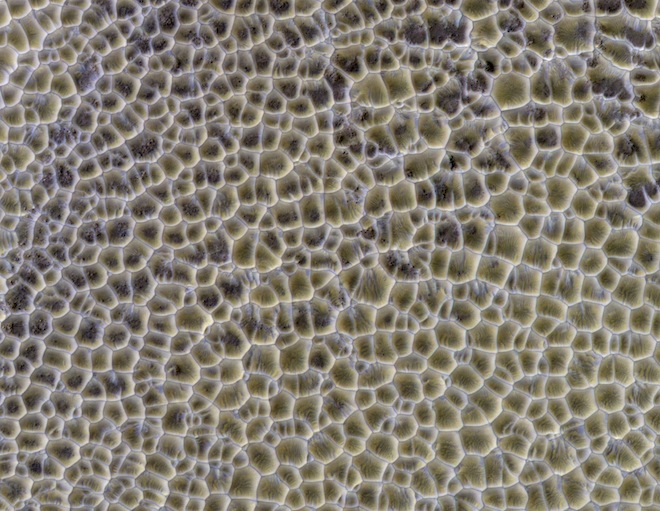
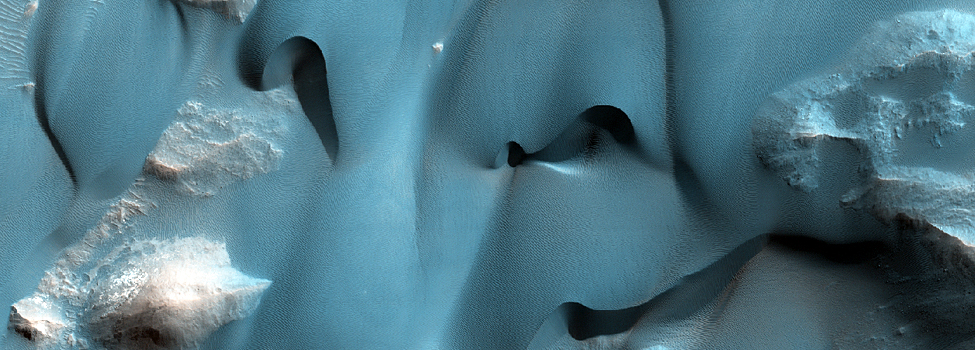
Many images of the Martian surface have confounded scientists, and some of them still do. But some, though they look puzzling and difficult to explain, have more prosaic explanations. The image below is a large area of intersecting sand dunes.
What is this? A vast area of Martian rice paddies? Lizard skin? Nope, just an area of intersecting sand dunes. Image: NASA/JPL-Caltech/Univ. of Arizona
The surface of Mars is peppered with craters, and HiRise has imaged many of them. This double crater was caused by a meteorite that split in two before hitting the surface.
This double impact crater was caused by a meteorite that split into two before hitting Mars. Notice how the eroding force of the wind has shaped each crater the same, smoothing one edge and creating dunes in the same place. Image: NASA/JPL-Caltech/Univ. of Arizona
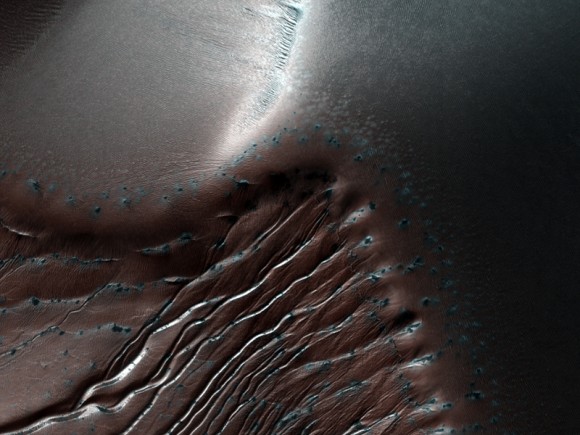
The image below shows gullies and dunes at the Russell Crater. In this image, the field of dunes is about 30 km long. This image was taken during the southern winter, when the carbon dioxide is frozen. You can see the frozen CO2 as white on the shaded side of the ridges. Scientists think that the gullies are formed when the CO2 melts in the summer.
These gullies are on the dunes of Russell Crater on Mars. This image was taken during winter, and the frozen carbon dioxide on the shaded slopes. Credit: NASA/JPL/University of Arizona
The next image is also the Russell Crater. It’s an area of study for the HiRise team, which means more Russell eye candy for us. This images shows the dunes, CO2 frost, and dust devil tracks that punctuate the area.
This image of the Russell Crater, an area of study for HiRise, shows the area covered in dunes, with some frost visible in the lower left. The larger, darker markings are dust devil tracks. Image: By NASA/JPL/University of Arizona – HiRISE, Public Domain, https://commons.wikimedia.org/w/index.php?curid=12015650
One of the main geological features on Mars is the Valles Marineris, the massive canyon system that dwarfs the Grand Canyon here on Earth. HiRise captured this image of delicate dune features inside Valles Marineris.
These delicate dune features formed inside the Valles Mariners, the massive canyon system on Mars. Image: NASA/JPL/University of Arizona
The Mars Reconnaissance Orbiter is still going strong. In fact, it continues to act as a communications relay for surface rovers. The HiRise camera is along for the ride, and if the past is any indication, it will continue to provide astounding images of Mars.
Artist's concept for a possible colony on Mars, which the United Arab Emirates indicated it is committed to building by 2117. Credit: Ville Ericsson
Elon Musk has been rather outspoken in recent years about his plan to create a human settlement on Mars. Stressing the need for a “backup location” for humanity, he has dedicated his company (SpaceX) to the creation of a reusable spacecraft (aka. the Interplanetary Transport System) that in the coming decades will be able to transport one-hundred people at a time to Mars.
In addition to Musk, Dutch entrepreneur Bas Lansdorp has also expressed an interest in creating a permanent settlement on Mars. In 2012, he founded MarsOne with the intent of developing the necessary expertise to mount one-way trips to the Red Planet by 2032. And according to an announcement from the government of Dubai, it seems they aren’t the only ones looking to colonize the Red Planet.
The announcement came on February 14th, 2017, during the 5th World Government Summit – which was held this year in Dubai. In the midst of presentations by notaries like Ban-Ki-Moon, Elon Musk, and Barack Obama, Sheikh Mohammed bin Rashid Al Maktoum and Sheikh Mohamed bin Zayed Al Nahyan shared their country’s vision of putting 600,000 humans on the Red Planet by the next century – known as the “Mars 2117 Project”.
In the course of his speech, Sheikh Mohammed emphasized the UAEs commitment to space sciences and its desire to accomplish one of the longest-held dreams of humanity:
“Human ambitions have no limits, and whoever looks into the scientific breakthroughs in the current century believes that human abilities can realize the most important human dream. The new project is a seed that we plant today, and we expect future generations to reap the benefits, driven by its passion to learn to unveil a new knowledge. The landing of people on other planets has been a longtime dream for humans. Our aim is that the UAE will spearhead international efforts to make this dream a reality.”
As growing investors in the field of space research, Sheikh Mohammed indicated that this project will accelerate the UAE’s commitment in this regard. Recent accomplishments by the Emirati space program include the successful deployment of the UAE’s first nanosatellite – Nayif-1 – which was launched a day after the Mars 2117 announcement (Feb. 15th, 2017).
This nanosatellite was the result of collaborative work between the Mohammed bin Rashid Space Centre (MBRSC) and the American University of Sharjah (AUS). Its intended purpose is to provide opportunities and hands-on experience for Emirati engineering students, as well as developing expertise in the designing, building, testing and operating of nanosatellites.
And then there’s the Hope Spacecraft, a project which was commissioned in 2015 by the Emirates Mars Mission. This project calls for the creation of a compact, hexagonal spacecraft that will reach the Red planet by 2021 and spend the next two years studying its atmosphere and weather. Not only is this mission designed to provide the first truly global picture of the Martian atmosphere, it will also be the first orbiter deployed by an Arab country.
Meanwhile, Sheikh Mohamed bin Zayed – the Crown Prince of Abu Dhabi and the Deputy Supreme Commander of the UAE Armed Forces – said that the objective of the project is to develop the skills and capacities of the UAE’s space program. He also indicates that the project will benefit research institutions and advance the fields of transportation, energy and food production here on Earth.
The “Mars 2117” project will develop an Emirati and international team of scientists to push the human exploration of Mars in years to come. pic.twitter.com/5ujxvyC8As
“Mars 2117” is a seed we are sowing today to reap the fruit of new generations led by a passion for science and advancing human knowledge. pic.twitter.com/IExtnpiO2B
“The Mars 2117 Project is a long term project, where our first objective is to develop our educational system so our sons will be able to lead scientific research across the various sectors,” he said. “The UAE became part of a global scientific drive to explore space, and we hope to serve humanity through this project.”
Elements of the project were showcased at the Summit by a team of Emirati engineers, scientists and researchers – which included a concept for a human city that would be built by robots. It also showcased aspects of the inhabitants’ lifestyle, like the transportation they would use, how they would generate power, how they would grow food, the infrastructure they would build, and the materials that would be used to construct the colony.
An artist’s illustration of an early Mars settlement. Credit: Bryan Versteeg/MarsOne
Given the long-term nature of this project, it will be broken down into multiple phases that will take place over the next few decades. Phase One will focus on preparing the scientists who will attempt to address all the challenges and concerns of sending human beings on a one-way trip to Mars. At the same time, the project calls for the creation of an Emiratis science team that will work with the international scientific community to speed up the research efforts.
Particular areas of concern will include creating spacecraft that are fast enough to ferry people to and from Earth in a respectable time frame. Then there’s the task of creating a working model of what the settlement will look like, and how the needs of its inhabitants will be met. Naturally, this will include methods for growing food and seeing to the health, safety, transportation, and energy needs of the colonists.
In the future, the UAE also anticipates that uncrewed missions will be mounted to explore the surface of Mars and locate a possible site for the future colony. In short, they are not only joining the “Mars or Bust” club, but also the international community of space explorers.
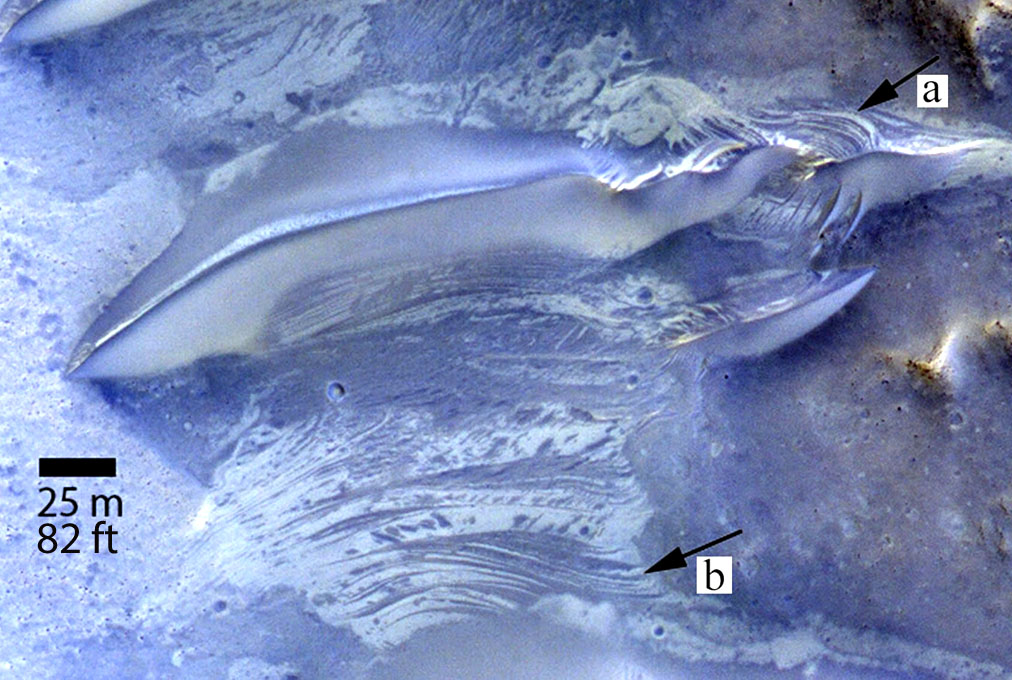
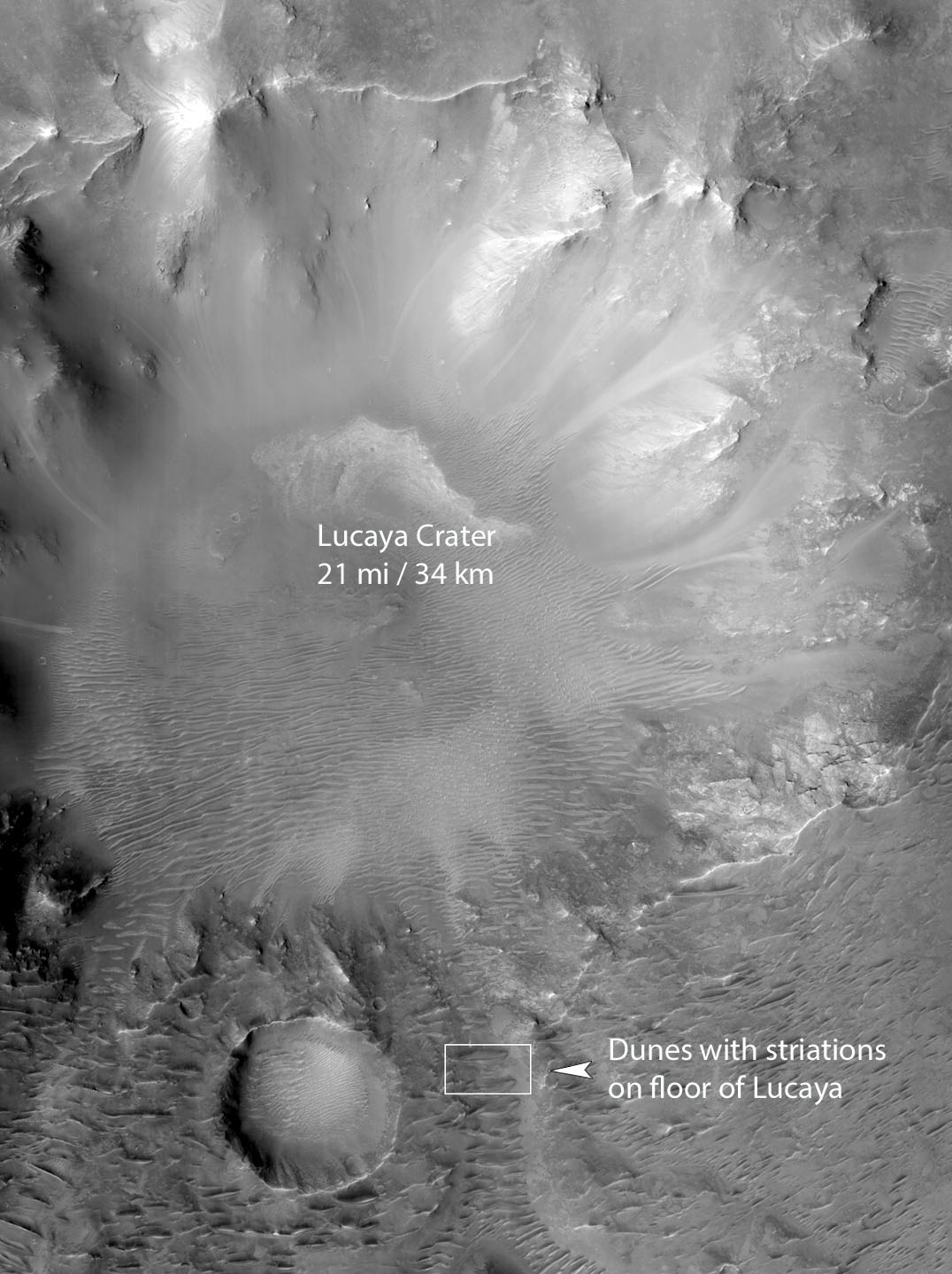
Striations exposed on the surface between Martian sand dunes (one pictured at top) in Lucaya Crater indicate fluctuating levels of salty groundwater. At “a” we see possible cross beds which are tilted layers of sand within larger layers deposited by wind or water. At b, dark and light strata are similar to that exposed in the dune at top and resemble the striations seen in the Namib Desert on Earth. The photo was taken by NASA’s Mars Reconnaissance Orbiter in infrared, red and blue light. Credit: NASA/JPL-Caltech
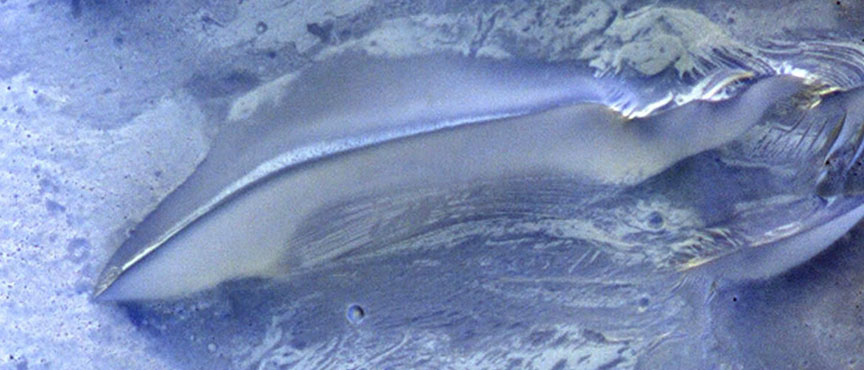
Researcher Dr. Mary Bourke from Trinity College Dublin have discovered a patch of land in an ancient valley in Mars’ Lucaya Crater that appears to have held water in the not-too-distant past, making it a prime target to search for past life forms on the Red Planet. Signs of water past and present pop up everywhere on Mars from now-dry, wriggly riverbeds snaking across arid plains to water ice exposed at the poles during the Martian summer.
A valley lined with sand dunes crosses the southern floor of the 21-mile-wide Lucaya Crater, located at latitude 11° south and longitude 52° east on Mars. Striations found between the dunes may have been created by recent water flows. The box shows the area pictured in the close up above. The 3.7-mile-long valley measures between 2,000 and 2,600 feet wide. Credit: NASA/JPL-Caltech with additions by the author
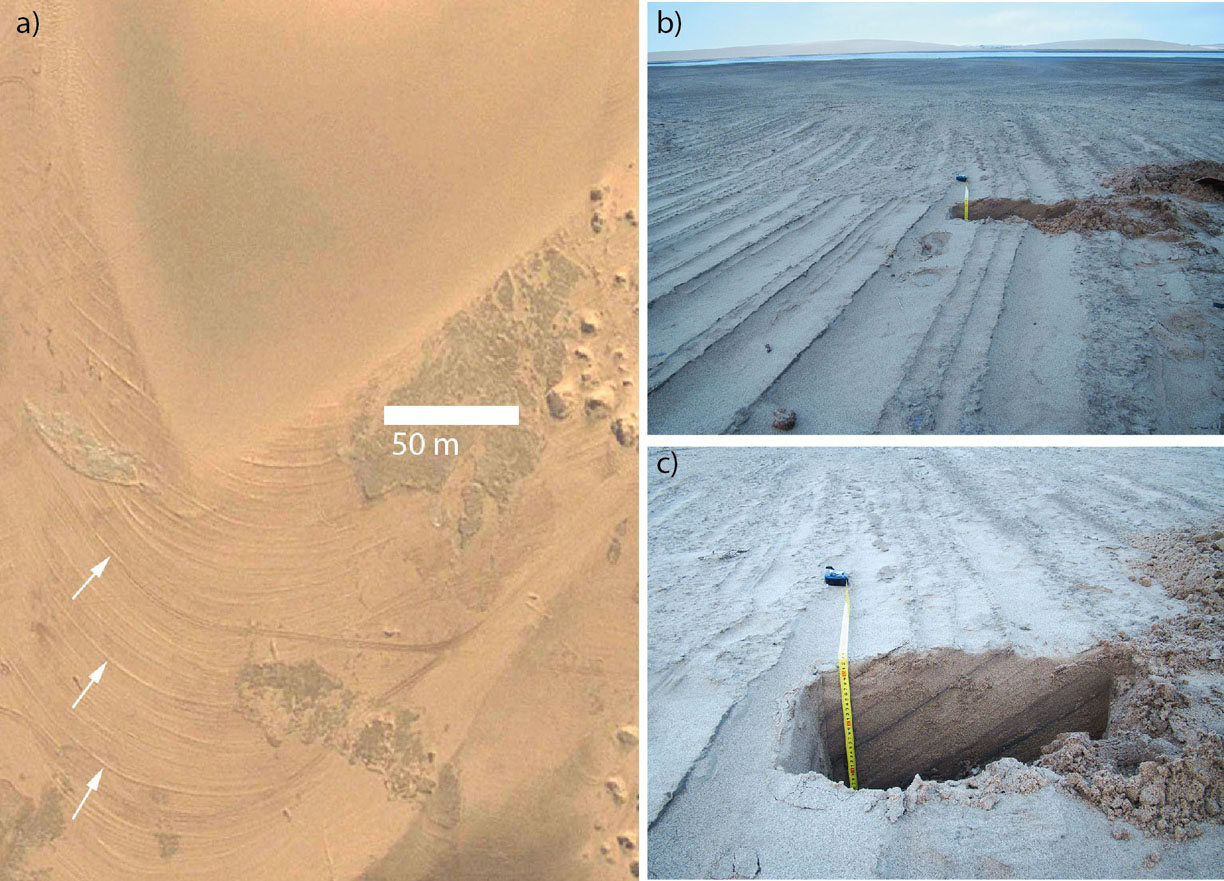
On Earth, Bourke had done previous studies of dunes in the Namib Desert near Walvis Bay, Namibia and noted “arctuate striations” — crusty arcs of sand cemented by water and minerals — on the surfaces of migrating sand dunes using photos taken by satellite. She subsequently assembled a team to check them out on the ground and discovered that the striations resulted when dune materials had been chemically cemented by salts left behind by evaporating groundwater.
“On Earth, desert dune fields are periodically flooded by water in areas of fluctuating groundwater, and where lakes, rivers and coasts are found in proximity,” said Bourke. These periodic floods leave tell-tale patterns behind them.” Once the material had been cemented, it hardens and remains behind as the dunes continue to migrate downwind.
Compare these cemented arctuate striations between dunes near Walvis Bay, Namibia with those in Lucaya Crater’s valley in the earlier image. White arrows highlight particularly prominent examples. Photos in (b) and (c) were taken from the ground. The excavated pit in (c) shows that the dipping sediment layers below the surface match the protruding layers on the surface. Alternating light and dark layers have different salt composition and grain size. Credit: Google Earth (left) and Dr Mary Bourke, Trinity College Dublin
Next, Bourke and colleague Prof. Heather Viles, from the University of Oxford, examined close up images of Mars taken with the Mars Reconnaissance Orbiter (MRO) and experienced a flash of insight: “You can imagine our excitement when we scanned satellite images of an area on Mars and saw this same patterned calling card, suggesting that water had been present in the relatively recent past.”
Bourke examined similar arcuate striations exposed on the surface between dunes, indications of fluctuating levels of salty groundwater during a time when dunes were actively migrating down the valley.
A possible scenario: an asteroid impacts Mars, forming Lucaya Crater and unleashing water flows that created the crater valley and striations.
So where did the water come from to create the striations in the crater valley? Bourke and Viles propose that water may have been released by the impact that formed Lucaya Crater especially if the target area was rich in ice.
Extreme temperatures during the impact would have vaporized water but also possibly melted other ice to flow for a time as liquid water. Alternatively, the impact may have jump-started hydrothermal activity as hot springs-style underground flows.
Flowing water would have created the valley and saturated the soils there with salty water. In dry periods, erosion from the wind would have picked away the water-eroded sands to create the striking pattern of repeating dunes we see to this day.
Water, water everywhere … once upon a time. Nanedi Valles, a roughly 500-mile-long (800 km) valley extending southwest-northeast and photographed by Mars Express. In this view, Nanedi Valles ranges from approximately 0.5 – 3 miles (0.8- to 5.0 km) wide and extends to a maximum of about 1,640 feet (500 meters) below the surrounding plains. The valley’s origins remain unclear, with scientists debating whether erosion caused by ground-water outflow, flow of liquid beneath an ice cover or collapse of the surface in association with liquid flow is responsible. In all cases, it’s clear that water was involved. Copyright ESA/DLR/FU Berlin (G. Neukum)
Carbonate rocks, which require liquid water to form are dissolved by the same, have been detected in the valley using spectroscopy and could have served as the cement to solidify sands between the moving dunes. That in concert with alternating dry and wet periods would create the striations seen in the MRO photos.
“These findings are hugely significant,” said Bourke. “Firstly, the Martian sand dunes show evidence that water may have been active near Mars’ equator — potentially in the not-too-distant past. And secondly, this location is now a potential geological target for detecting past life forms on the Red Planet, which is important to those involved in selecting sites for future missions.”
NASA’s Space Launch System (SLS) blasts off from launch pad 39B at the Kennedy Space Center in this artist rendering showing a view of the liftoff of the Block 1 70-metric-ton (77-ton) crew vehicle configuration. Credit: NASA/MSFC
NASA’s Space Launch System (SLS) blasts off from launch pad 39B at the Kennedy Space Center in this artist rendering showing a view of the liftoff of the Block 1 70-metric-ton (77-ton) crew vehicle configuration. Credit: NASA/MSFC
KENNEDY SPACE CENTER, FL – In a potentially major change in direction for NASA’s human spaceflight architecture, the agency is officially studying the possibility of adding a crew of astronauts to the first flight of the Orion deep space crew capsule and the heavy lift Space Launch System (SLS) rocket currently in development, announced Acting NASA Administrator Robert Lightfoot.
Lightfoot made the announcement in a speech to the Space Launch System/Orion Suppliers Conference in Washington, D.C. as well as an agency wide memo circulated to NASA employees on Wednesday, Feb. 15.
The move, if implemented, for the first joint SLS/Orion flight on Exploration Mission-1 (EM-1) would advance the date for sending American astronauts back to the Moon by several years – from the next decade into this decade.
Lightfoot has directed Bill Gerstenmaier, associate administrator for the Human Exploration and Operations Mission Directorate, to start detailed studies of what it would take to host astronauts inside the Orion EM-1 crew capsule.
“I have asked Bill Gerstenmaier to initiate a study to assess the feasibility of adding a crew to Exploration Mission-1, the first integrated flight of SLS and Orion,” Lightfoot said.
NASA’s current plans call for the unmanned blastoff of Orion EM-1 on the SLS-1 rocket later next year on the first test flight – roughly in the September to November timeframe from Launch Complex 39B at the Kennedy Space Center.
“The study will examine the opportunities it could present to accelerate the effort of the first crewed flight and what it would take to accomplish that first step of pushing humans farther into space,” NASA officials added in a statement.
But because of all the extra work required to upgrade a host of systems for both Orion and SLS for humans ahead of schedule, liftoff of that inaugural mission would have to slip by at least a year or more.
“I know the challenges associated with such a proposition, like reviewing the technical feasibility, additional resources needed, and clearly the extra work would require a different launch date” Lighfoot elaborated.
“That said, I also want to hear about the opportunities it could present to accelerate the effort of the first crewed flight and what it would take to accomplish that first step of pushing humans farther into space.”
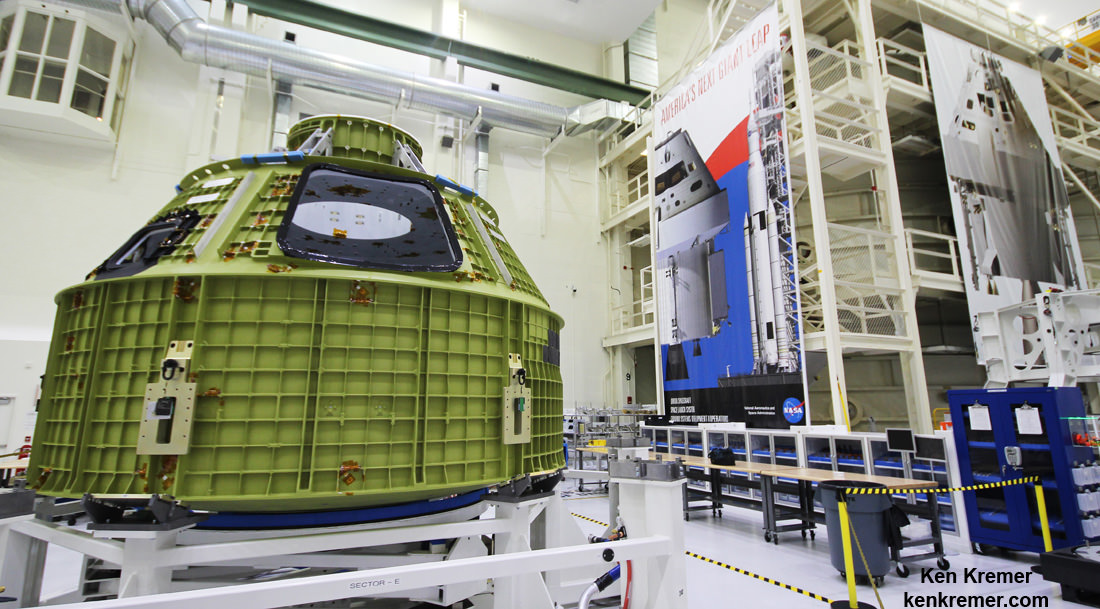
Orion crew module pressure vessel for NASA’s Exploration Mission-1 (EM-1) is unveiled for the first time on Feb. 3, 2016 after arrival at the agency’s Kennedy Space Center (KSC) in Florida. It is secured for processing in a test stand called the birdcage in the high bay inside the Neil Armstrong Operations and Checkout (O&C) Building at KSC. Launch to the Moon is slated in 2018 atop the SLS rocket. Credit: Ken Kremer/kenkremer.com
The Orion EM-1 capsule is currently being manufactured at the Kennedy Space Center.
Components of the SLS-1 rocket are being manufactured at NASA’s Michoud Assembly Facility and elsewhere around the country by numerous suppliers.
Welding is nearly complete on the liquid hydrogen tank will provide the fuel for the first flight of NASA’s new rocket, the Space Launch System, with the Orion spacecraft in 2018. The tank has now completed welding on the Vertical Assembly Center at NASA’s Michoud Assembly Facility in New Orleans. Credit: Ken Kremer/kenkremer.com
The 2018 launch of NASA’s Orion on the unpiloted EM-1 mission counts as the first joint flight of SLS and Orion, and the first flight of a human rated spacecraft to deep space since the Apollo Moon landing era ended more than 4 decades ago.
Now it might actually include humans.
Details to follow.
An artist’s interpretation of NASA’s Space Launch System Block 1 configuration with an Orion vehicle. Image: NASA
Orion is designed to send astronauts deeper into space than ever before, including missions to the Moon, asteroids and the Red Planet.
The liquid hydrogen tank qualification test article for NASA’s new Space Launch System (SLS) heavy lift rocket lies horizontally after final welding was completed at NASA’s Michoud Assembly Facility in New Orleans in July 2016. Credit: Ken Kremer/kenkremer.com
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
This artist concept depicts the Space Launch System rocket rolling out of the Vehicle Assembly Building at NASA’s Kennedy Space Center. SLS will be the most powerful rocket ever built and will launch the agency’s Orion spacecraft into a new era of exploration to destinations beyond low-Earth orbit. Credits: NASA/Marshall Space Flight Center
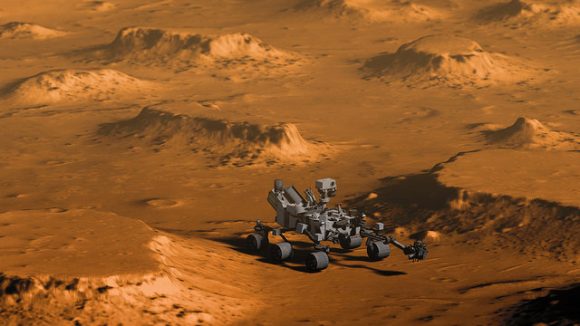
The Mars rover Curiosity on the road to Hematite Ridge. Credit: NASA/JPl-Caltech/MSSS/Seán Doran.
We all love the ‘selfies’ the Curiosity rover takes of itself sitting on Mars. We love them because it’s so amazing to see a human-made object on another world, and these images give us hope that one day we might have pictures of ourselves standing on the surface of the Red Planet.
But wouldn’t it be great if we see Curiosity ‘in action’ on Mars, and be like a fly on a rock, watching the rover roll past us?
Thanks to creative artist Seán Doran, we can do just that. Take a look at this absolutely amazing video Seán created, using real images of the Mars landscape from Curiosity and the HiRISE camera on the Mars Reconnaissance Orbiter, with a GCI Curiosity roving around.
Please note that Curiosity doesn’t actually move this fast, as in the video it is going about 8 kph, whereas in reality, the rover travels at a top speed of about .16 kph. But still, this is just fantastic!
“As much as I enjoy looking at the images from Mars, it is difficult to get a real sense of the scene as there is no obvious Earthly scale cue,” Seán told Universe Today via email. “No trees, plants, buildings or humans. So, I decided to put Curiosity into her own photographs to help us relate to them.”
Seán has provided a glimpse at how to do this, and says there are two ways of achieving these results.
One, is the easy way:
Create a photomosaic of a scene where tracks are present.
https://flic.kr/p/FnJqxE
Render a 3D model of Curiosity to the same relative angle of the tracks and composite this into the image.
https://flic.kr/p/GfSDzm
Or, there’s the hard way, a process which allows Seán to ‘drive’ Curiosity across the field of view of any photomosaic the rover has taken, whether there are tracks or not. This process involves using the what are called Digital Terrain Model (DTM) data from HiRISE, which provide elevation and terrain information (more info about DTMs in our recent article here) and by mapping with a virtual camera.
But to make everything realistic, your virtual rover needs to be the right size and even the right weight.
“It is critical to accurately determine the size of Curiosity in the virtual scene and this is done by comparing images of the rover taken by HiRISE and making sure they match,” Seán said. “By matching the viewpoint and the field of view it is possible to derive an accurate scale for Curiosity at any point in the scene.”
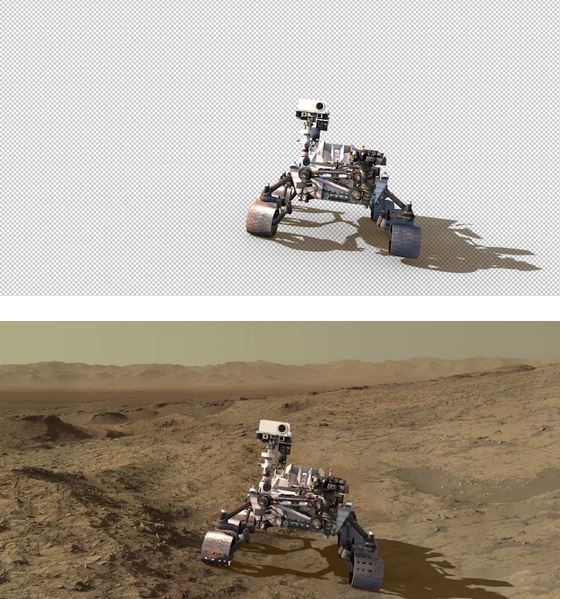
So by using this view from HiRISE of Curiosity sitting on the Naukluft Plateau:
HiRISE image of the Curiosity rover on the surface of Mars, on the Naukluft Plateau. Credit: NASA/JPL/University of Arizona
And then using Curiosity’s image of the same location, he can put a true-to-size rover in the image:
A true-to-size CGI rover inserted in the view of the Naukluft Plateau. Credit: NASA/JPL/University of Arizona/Seán Doran.
Then he ‘builds’ the route and terrain to make it even more realistic.
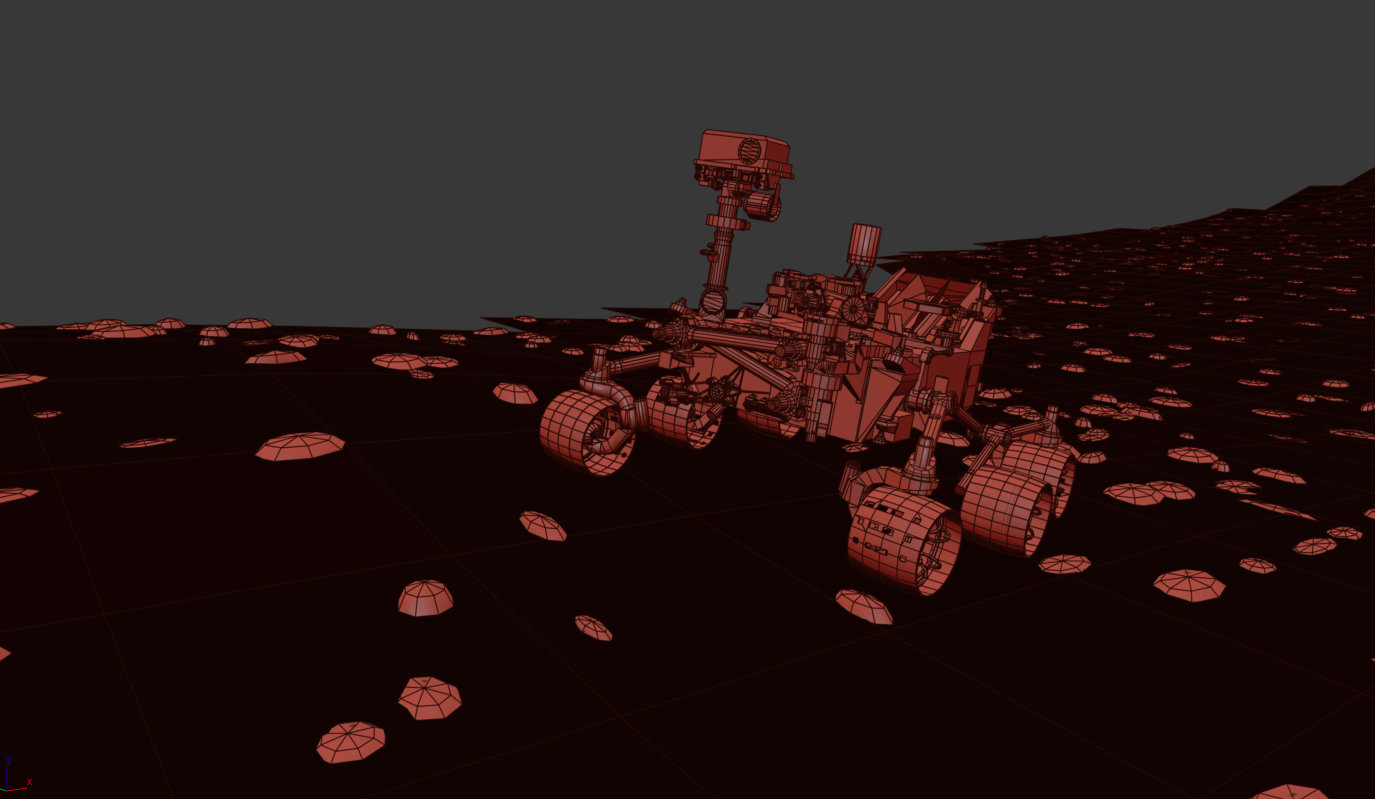
“Before I drive Curiosity I need to build a rocky collision course so she can physically interact with the environment,” he said. “This really helps to sell the final shot.”
Simulated terrain and rover on the Naukluft Plateau. Credit: Seán Doran.
Then Seán builds a ‘car rig’ for Curiosity and drives her across the scene, in line with the actual route taken. Seán says good choices for doing this are using MadCar and DriveMaster for 3DS Max.
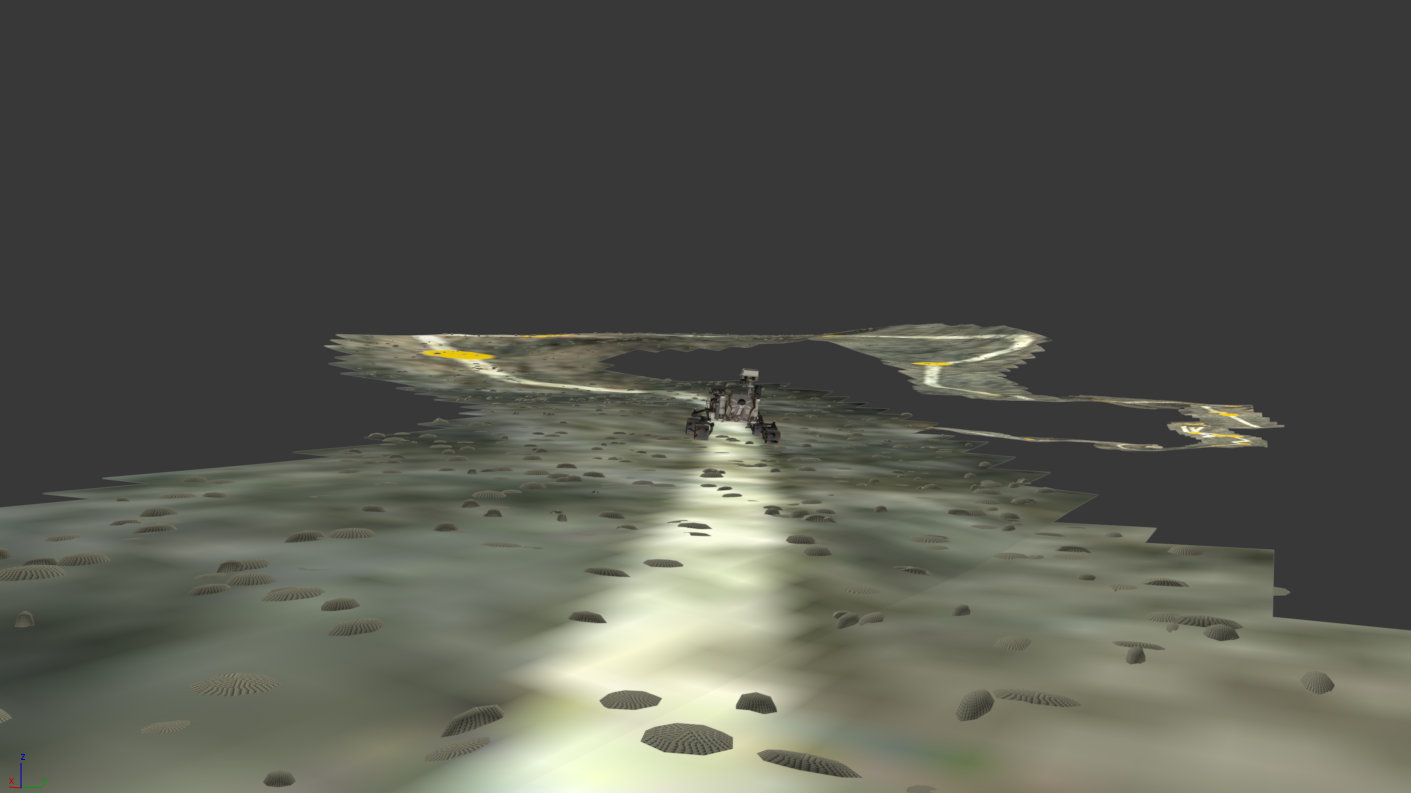
Simulated Curiosity rover on the Martian terrain, created using MadCar & DriveMaster for 3DS Max. Credit: Seán Doran.
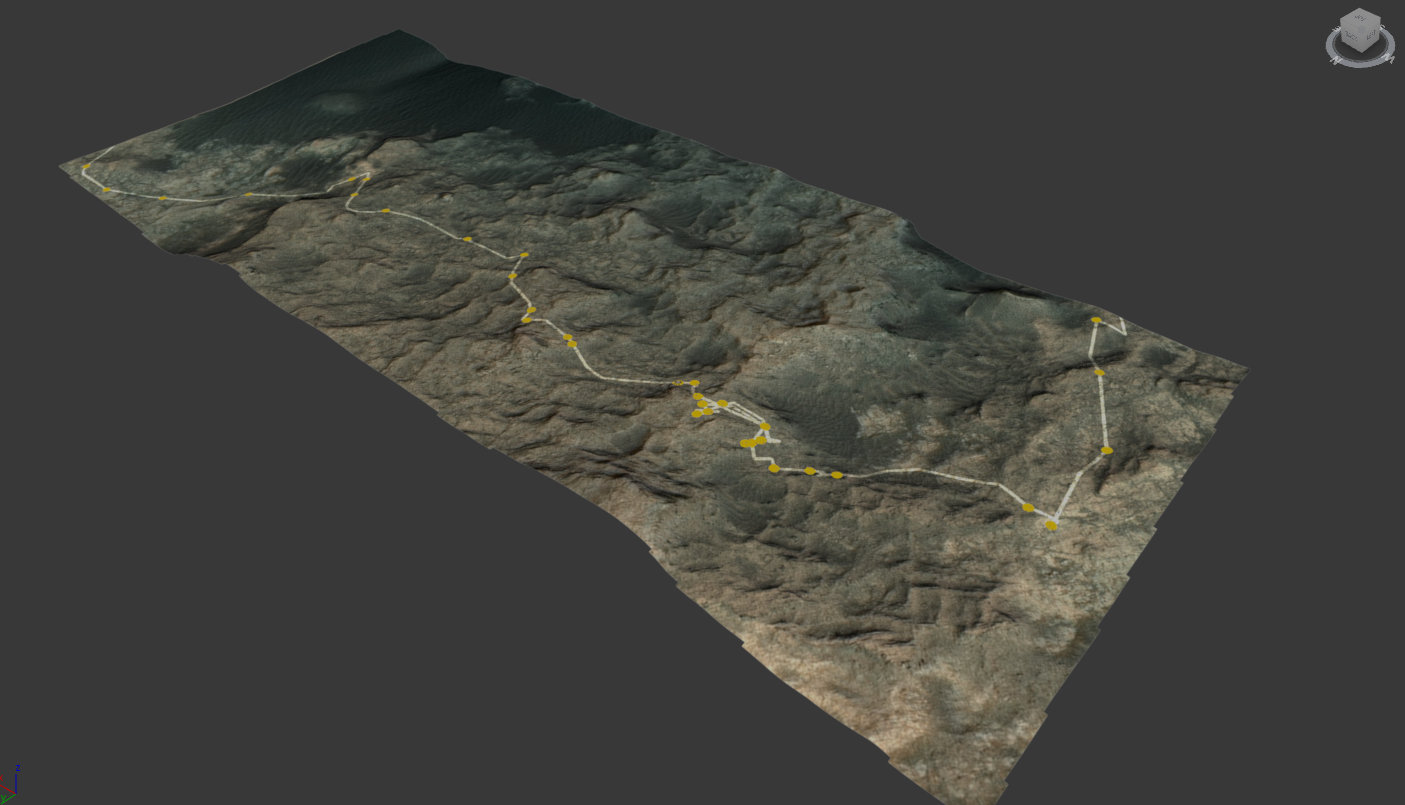
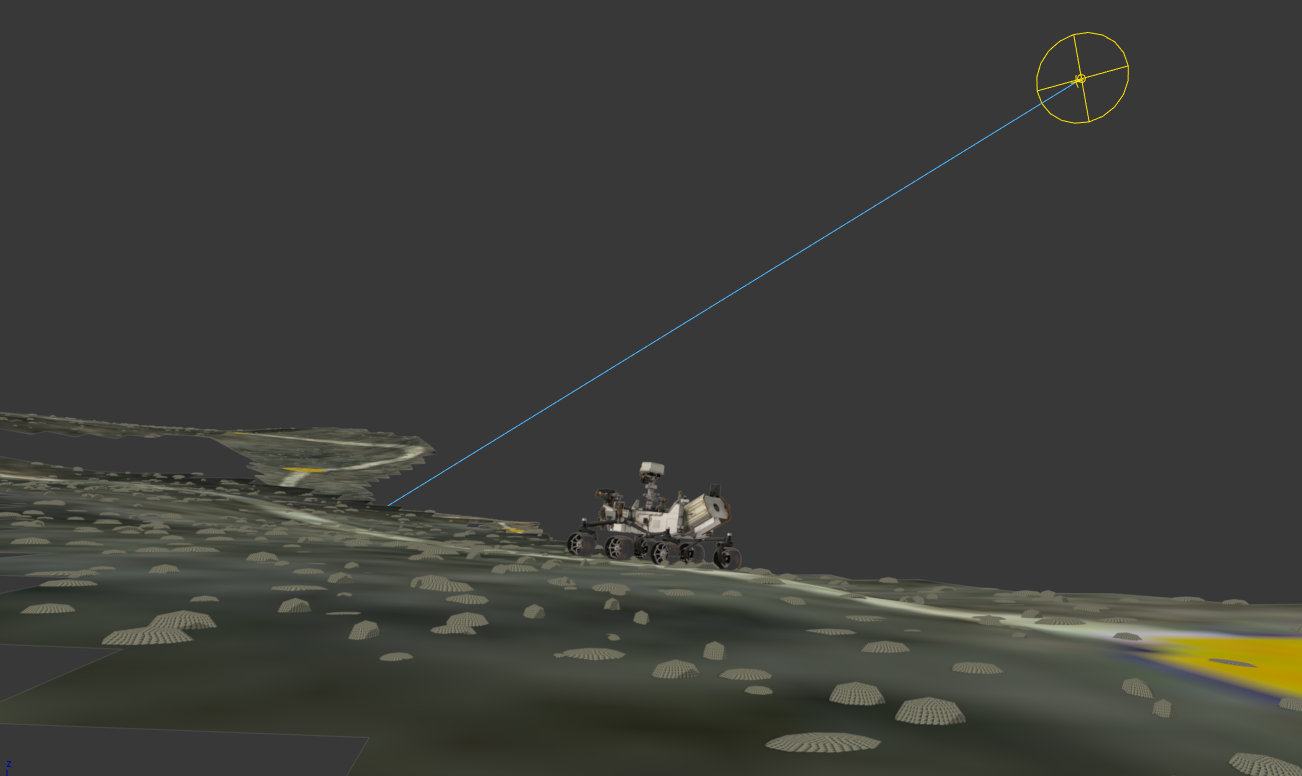
Then he takes a look at the big picture, taking the HiRISE image of the area and using the DTM files to create elevation and texture, and adds the route the rover will take so he knows where to ‘drive’ the rover:
Full extent of Naukluft Plateau built with HiRISE elevation and texture data, with the route superimposed. Credit: NASA/JPL/University of Arizona/Seán Doran.
Then comes the time-consuming part, where once he has a good animation, he needs to render out each shot, plus he matches the Sun position so the virtual shadows cast will match those in the photomosaic. (Wow!)
Simulated rover and terrain with position of the Sun. Credit: Seán Doran.
“I render separate passes for the background photomosaic and the foreground Curiosity,” Seán explained. “The HiRISE physics model is rendered with a Shadow Matte material which only catches shadows, this enables the rover to be easily blended in the final stage of the build.”
Then, everything is brought together in Adobe After Effects, where further image processing is used to blend both render elements together.
Simulated rover inserted in the scene with Adobe After Effects. Credit: Seán Doran.
We thank Seán Doran not only for completing this intricate process we can all enjoy, but for sharing the details!
“There is nothing trivial about building these assets, they are made out of fascination with the material and desire to communicate the excitement of being ‘present’ on another planet,” Seán said. “But I think it a great way to help people engage with such an exciting mission.”
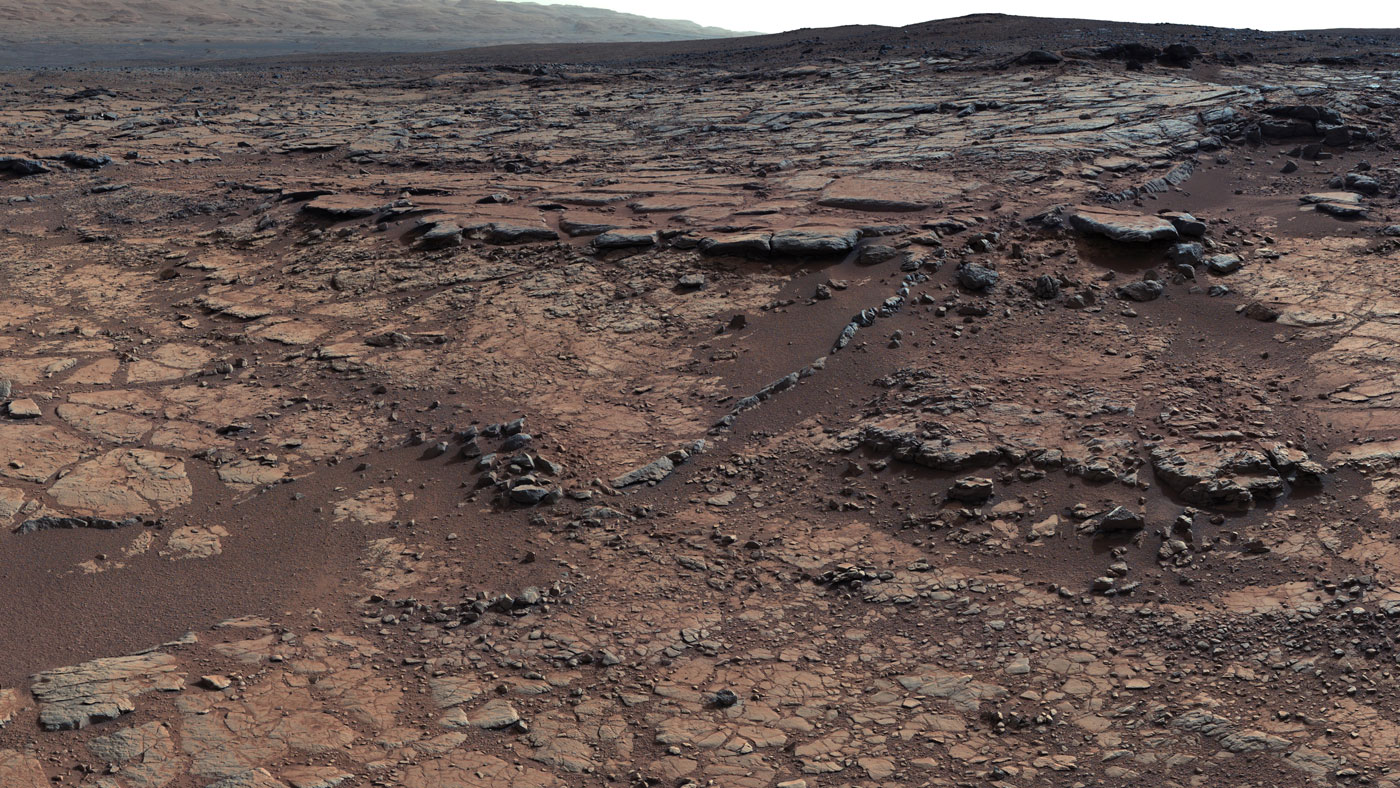
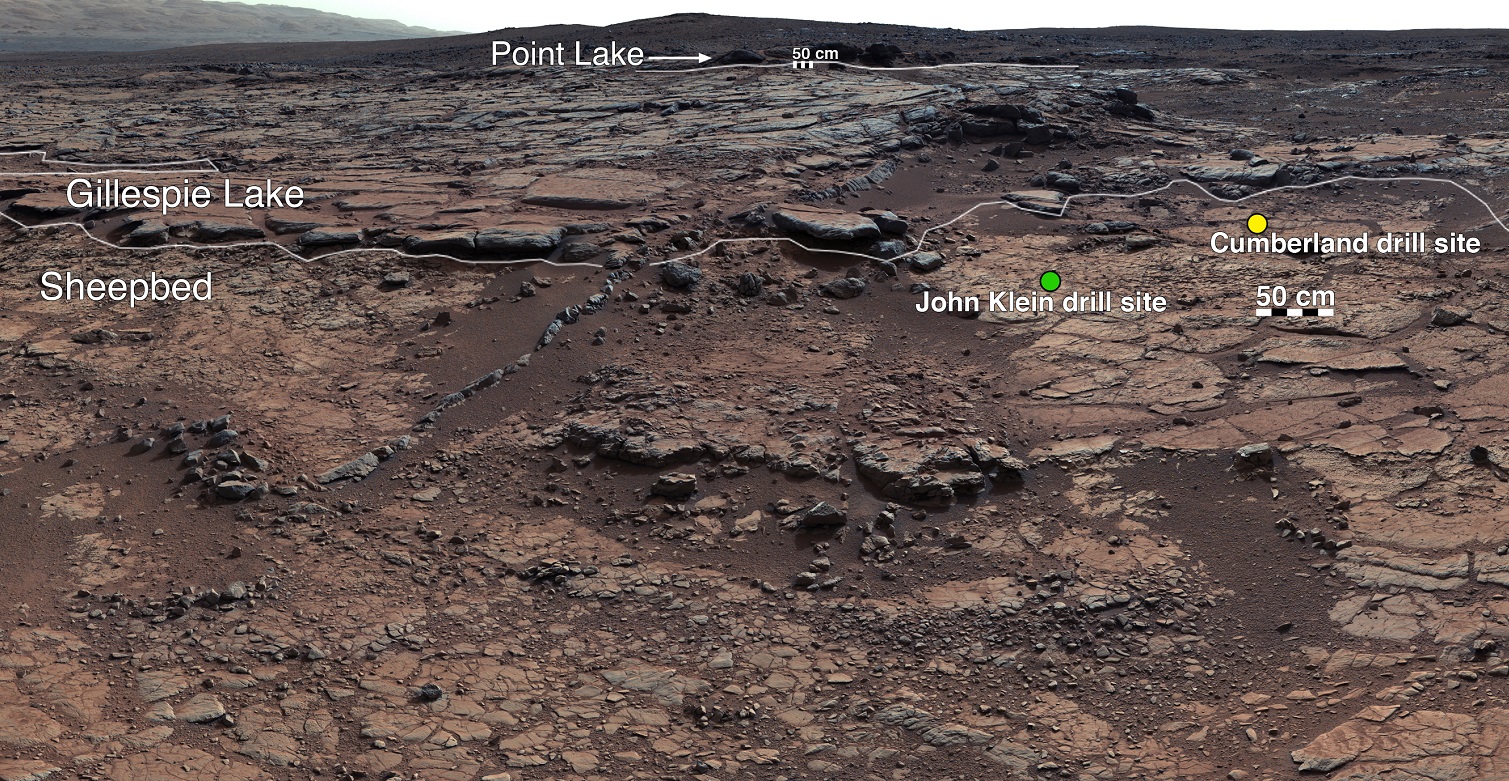
Bedrock at this site added to a puzzle about ancient Mars by indicating that a lake was present, but that little carbon dioxide was in the air to help keep a lake unfrozen. Credit: NASA/JPL-Caltech/MSSS
The study of Mars’ surface and atmosphere has unlocked some ancient secrets. Thanks to the efforts of the Curiosity rover and other missions, scientists are now aware of the fact that water once flowed on Mars and that the planet had a denser atmosphere. They have also been able to deduce what mechanics led to this atmosphere being depleted, which turned it into the cold, desiccated environment we see there today.
At the same time though, it has led to a rather intriguing paradox. Essentially, Mars is believed to have had warm, flowing water on its surface at a time when the Sun was one-third as warm as it is today. This would require that the Martian atmosphere had ample carbon dioxide in order to keep its surface warm enough. But based on the Curiosity rover’s latest findings, this doesn’t appear to be the case.
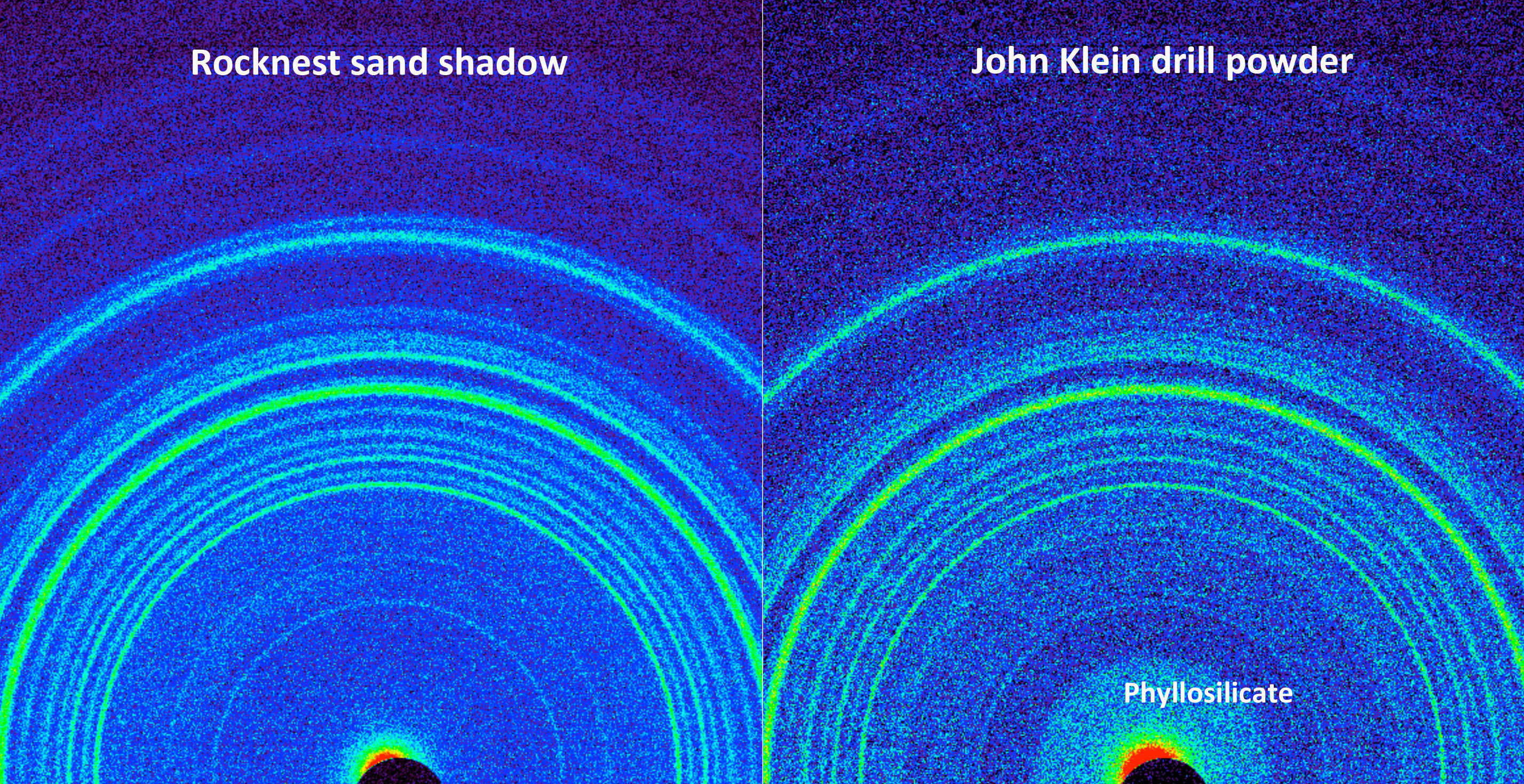
These findings were part of an analysis of data taken by the Curiosity’s Chemistry and Mineralogy X-ray Diffraction (CheMin) instrument, which has been used to study the mineral content of drill samples in the Gale Crater. The results of this analysis were recently published in Proceedings of the National Academy of Science, where the research team indicated that no traces of carbonates were found in any samples taken from the ancient lake bed.
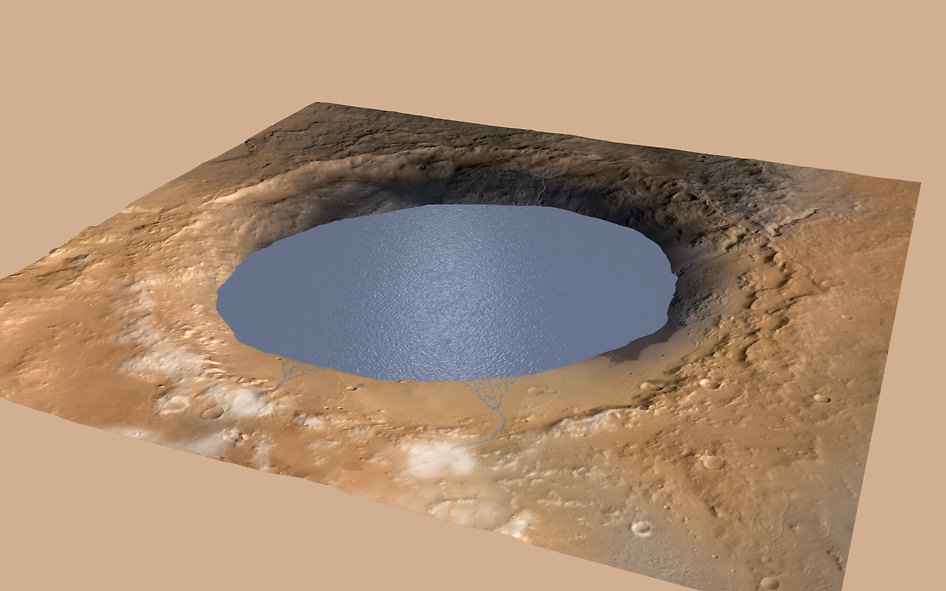
Simulated view of Gale Crater Lake on Mars, depicting a lake of water partially filling Mars’ Gale Crater. Credit: NASA/JPL-Caltech/ESA/DLR/FU Berlin/MSSS
To break it down, evidence collected by Curiosity (and a slew of other rovers, landers and orbiters) has led scientists to conclude that roughly 3.5 billion years ago, Mars surface had lakes and flowing rivers. They have also determined, thanks to the many samples taken by Curiosity since it landed in the Gale Crater in 2011, that this geological feature was once a lake bed that gradually became filled with sedimentary deposits.
However, for Mars to have been warm enough for liquid water to exist, its atmosphere would have had to contain a certain amount of carbon dioxide – providing a sufficient Greenhouse Effect to compensate for the Sun’s diminished warmth. Since rock samples in the Gale Crater act as a geological record for what conditions were like billions of years ago, they would surely contain plenty of carbonate minerals if this were the case.
Carbonates are minerals that result from carbon dioxide combining with positively charged ions (like magnesium and iron) in water. Since these ions have been found to be in good supply in samples of Martian rock, and subsequent analysis has shown that conditions never became acidic to the point that the carbonates would have dissolved, there is no apparent reason why they wouldn’t be showing up.
Along with his team, Thomas Bristow – the principal investigator for the CheMin instrument on Curiosity – calculated what the minimum amount of atmospheric carbon dioxide would need to be, and how this would have been indicated by the levels of carbonate found in Martian rocks today. They then sorted through the years worth of the CheMin instrument’s data to see if there were any indications of these minerals.
Comparison of X-ray diffraction patterns of two different samples analyzed by Curiosity’s Chemistry and Mineralogy (CheMin) instrument. Credit: NASA/JPL-Caltech/Ames
But as he explained in a recent NASA press release, the findings simply didn’t measure up:
“We’ve been particularly struck with the absence of carbonate minerals in sedimentary rock the rover has examined. It would be really hard to get liquid water even if there were a hundred times more carbon dioxide in the atmosphere than what the mineral evidence in the rock tells us.”
In the end, Bristow and his team could not find even trace amounts of carbonates in the rock samples they analyzed. Even if just a few tens of millibars of carbon dioxide had been present in the atmosphere when a lake existed in the Gale Crater, it would have produced enough carbonates for Curiosity’s CheMin to detect. This latest find adds to a paradox that has been plaguing Mars researchers for years.
Basically, researchers have noted that there is a serious discrepancy between what surface features indicate about Mars’ past, and what chemical and geological evidence has to say. Not only is there plenty of evidence that the planet had a denser atmosphere in the past, more than four decades of orbital imaging (and years worth of surface data) have yielded ample geomorphological evidence that Mars once had surface water and an active hydrological cycle.
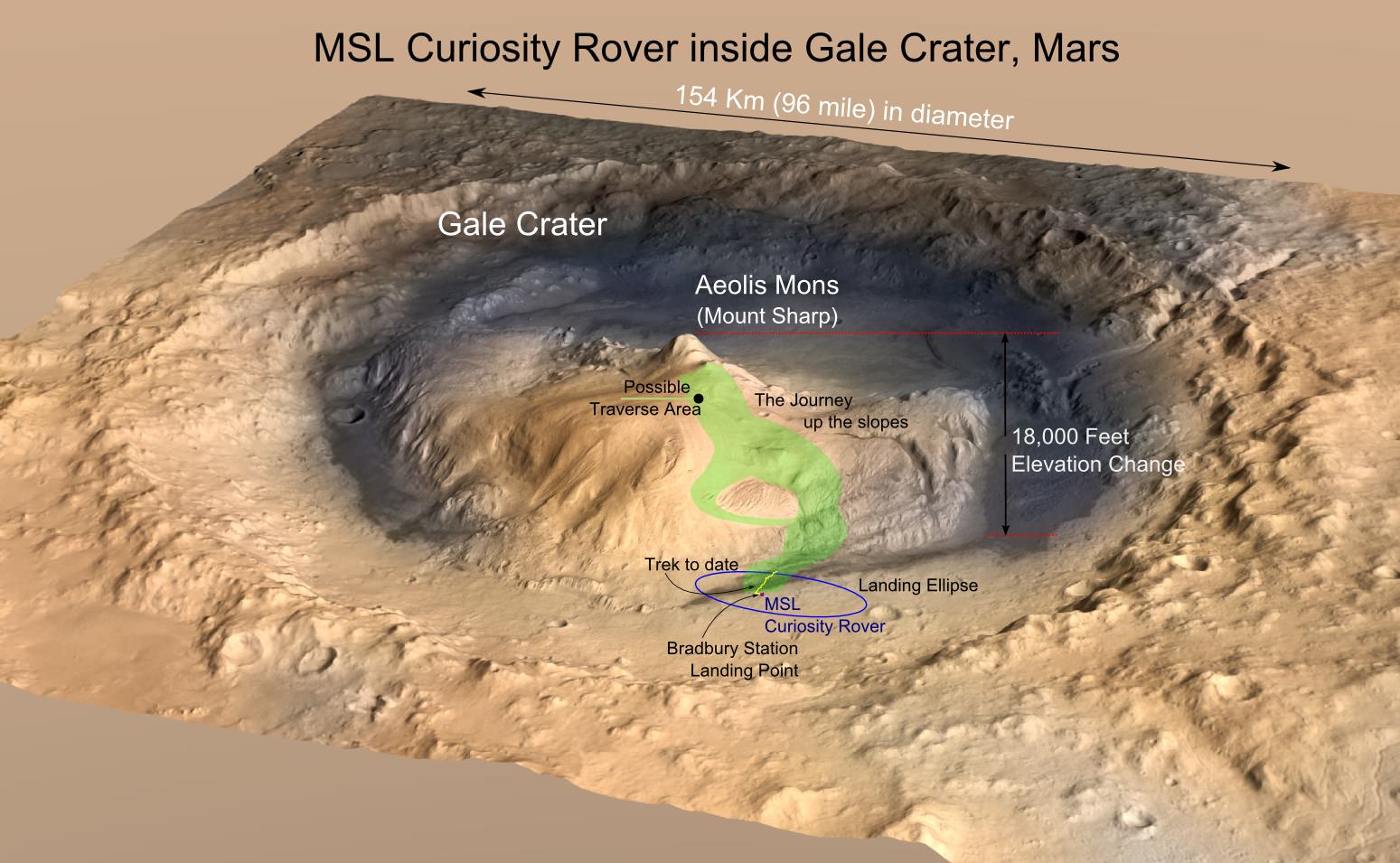
The Gale Crater – the landing location and trek of the Rover Curiosity – as it is today, imaged by the MRO. Credits: NASA/JPL, illustration, T.Reyes
However, scientists are still struggling to produce models that show how the Martian climate could have maintained the types of conditions necessary for this to have been the case. The only successful model so far has been one in which the atmosphere contained a significant amount of CO2 and hydrogen. Unfortunately, an explanation for how this atmosphere could be created and sustained remains elusive.
In addition, the geological and chemical evidence for such a atmosphere existing billions of years ago has also been in short supply. In the past, surveys by orbiters were unable to find evidence of carbonate minerals on the surface of Mars. It was hoped that surface missions, like Curiosity, would be able to resolve this by taking soil and drill samples where water had been known to exist.
But as Bristow explained, his team’s study has effectively closed the door on this:
“It’s been a mystery why there hasn’t been much carbonate seen from orbit. You could get out of the quandary by saying the carbonates may still be there, but we just can’t see them from orbit because they’re covered by dust, or buried, or we’re not looking in the right place. The Curiosity results bring the paradox to a focus. This is the first time we’ve checked for carbonates on the ground in a rock we know formed from sediments deposited under water.”
Annontated version of the bedrock site in the Gale Crater where the Curiosity rover has taken drill samples. Credit: NASA/JPL-Caltech/MSSS
There are several possible explanations for this paradox. On the one hand, some scientists have argued that the Gale Crater Lake may not have been an open body of water and was perhaps covered in ice, which was just thin enough to still allow for sediments to get in. The problem with this explanation is that if this were true, there would be discernible indications left behind – which would include deep cracks in the soft sedimentary lakebed rock.
But since these indications have not been found, scientists are left with two lines of evidence that do not match up. As Ashwin Vasavada, Curiosity’s Project Scientist, put it:
“Curiosity’s traverse through streambeds, deltas, and hundreds of vertical feet of mud deposited in ancient lakes calls out for a vigorous hydrological system supplying the water and sediment to create the rocks we’re finding. Carbon dioxide, mixed with other gases like hydrogen, has been the leading candidate for the warming influence needed for such a system. This surprising result would seem to take it out of the running.”
Luckily, incongruities in science are what allow for new and better theories to be developed. And as the exploration of the Martian surface continues – which will benefit from the arrival of the ExoMars and the Mars 2020missions in the coming years – we can expect additional evidence to emerge. Hopefully, it will help point the way towards a resolution for this paradox, and not complicate our theories even more!
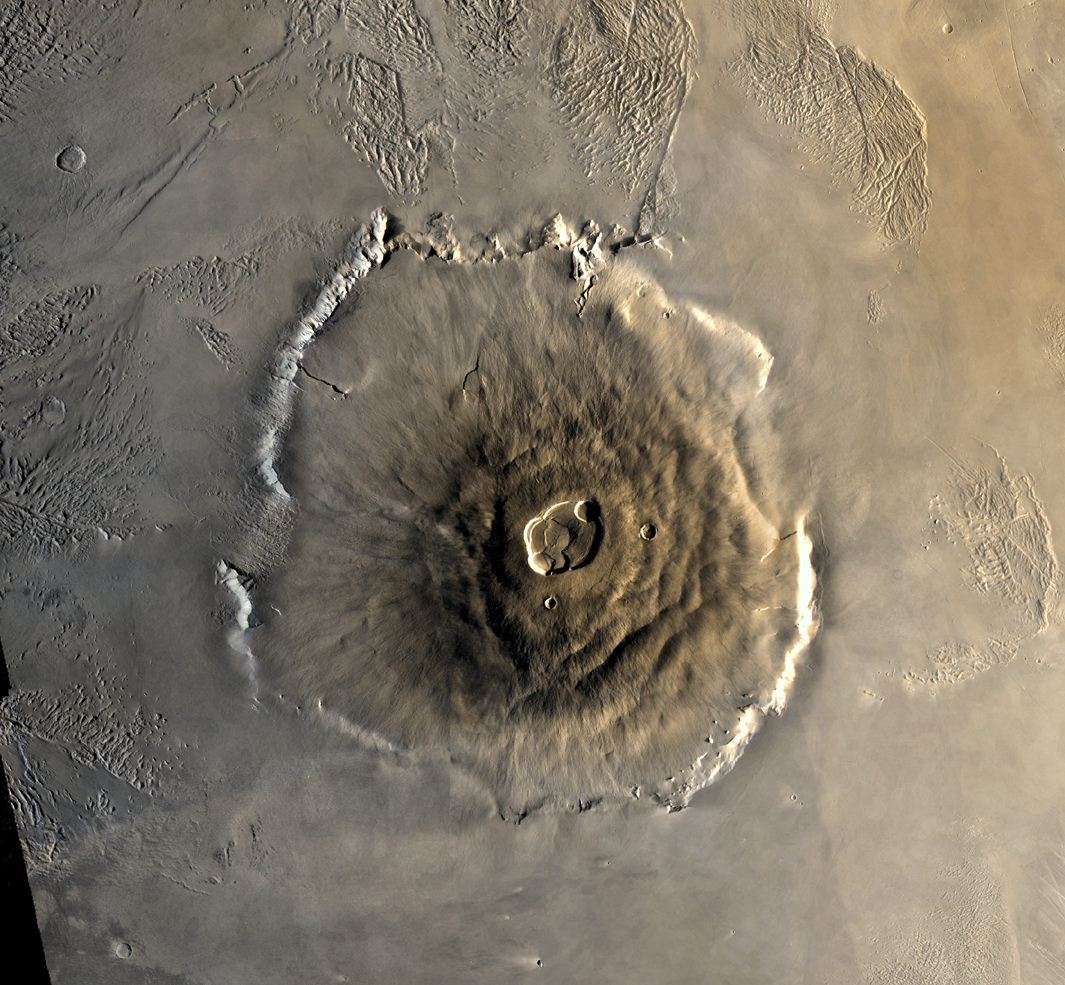
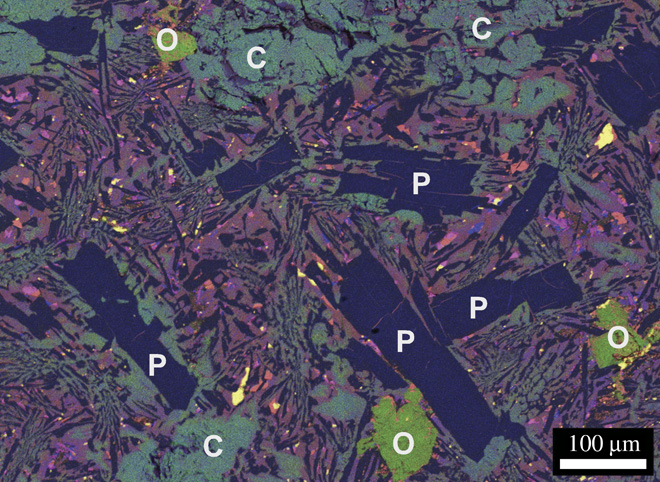
Olympus Mons on Mars is the largest volano in our Solar System. Analysis of a Martian meteorite that fell to Earth in 2012 confirms that Mars also has the longest-lived volcanoes in our Solar System. Image: NASA/JPL
Mars is renowned for having the largest volcano in our Solar System, Olympus Mons. New research shows that Mars also has the most long-lived volcanoes. The study of a Martian meteorite confirms that volcanoes on Mars were active for 2 billion years or longer.
A lot of what we know about the volcanoes on Mars we’ve learned from Martian meteorites that have made it to Earth. The meteorite in this study was found in Algeria in 2012. Dubbed Northwest Africa 7635 (NWA 7635), this meteorite was actually seen travelling through Earth’s atmosphere in July 2011.
A sample from the meteorite Northwest Africa 7635. Image: Mohammed Hmani
The lead author of this study is Tom Lapen, a Geology Professor at the University of Houston. He says that his findings provide new insights into the evolution of the Red Planet and the history of volcanic activity there. NWA 7635 was compared with 11 other Martian meteorites, of a type called shergottites. Analysis of their chemical composition reveals the length of time they spent in space, how long they’ve been on Earth, their age, and their volcanic source. All 12 of them are from the same volcanic source.
Mars has much weaker gravity than Earth, so when something large enough slams into the Martian surface, pieces of rock are ejected into space. Some of these rocks eventually cross Earth’s path and are captured by gravity. Most burn up, but some make it to the surface of our planet. In the case of NWA 7635 and the other meteorites, they were ejected from Mars about 1 million years ago.
“We see that they came from a similar volcanic source,” Lapen said. “Given that they also have the same ejection time, we can conclude that these come from the same location on Mars.”
Taken together, the meteorites give us a snapshot of one location of the Martian surface. The other meteorites range from 327 million to 600 million years old. But NWA 7635 was formed 2.4 billion years ago. This means that its source was one of the longest lived volcanoes in our entire Solar System.
This false color X-ray of NWA 7635 shows the meteorite’s mineralogy mineral textures. O, olivine; P, plagioclase (maskelynite); C, clinopyroxene (augite). Chemical compositions: Fe (purple), Mg (green), Ca (blue), Ti (magenta), and S (yellow). Purple colors in the mesostasis represent Fe-rich augite. You’re welcome, mineral nerds. Image: Lapen et. al.
Volcanic activity on Mars is an important part of understanding the planet, and whether it ever harbored life. It’s possible that so-called super-volcanoes contributed to extinctions here on Earth. The same thing may have happened on Mars. Given the massive size of Olympus Mons, it could very well have been the Martian equivalent of a super-volcano.
The ESA’s Mars Express Orbiter sent back images of Olympus Mons that showed possible lava flows as recently as 2 million years ago. There are also lava flows on Mars that have a very small number of impact craters on them, indicating that they were formed recently. If that is the case, then it’s possible that Martian volcanoes will be visibly active again.
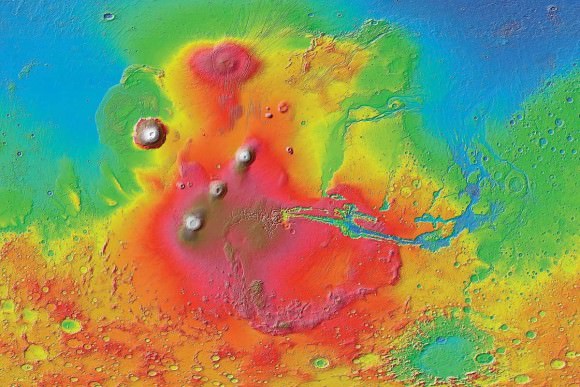
A colorized image of the surface of Mars taken by the Mars Reconnaissance Orbiter. The line of three volcanoes is the Tharsis Montes, with Olympus Mons to the northwest. Valles Marineris is to the east. Image: NASA/JPL-Caltech/ Arizona State University
Continuing volcanic activity on Mars is highly speculative, with different researchers arguing for and against it. The relatively crater-free, smooth surfaces of some lava features on Mars could be explained by erosion, or even glaciation. In any case, if there is another eruption on Mars, we would have to be extremely lucky for one of our orbiters to see it.
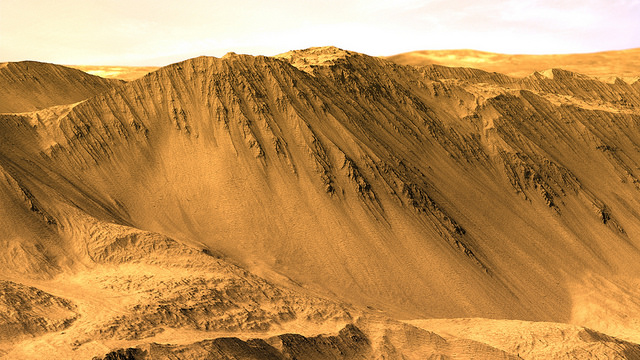
The rim of Tooting Crater on Mars, rendered from HiRISE data using Autodesk Maya and Adobe Photoshop. Credit: NASA/JPL/University of Arizona/USGS/image editing by Kevin Gill.
By day, Kevin Gill is a software engineer at the Jet Propulsion Laboratory. But on nights and weekends he takes data from spacecraft and turns them into scenes that can transport you directly to the surface of Mars.
Gill is one of many so-called “amateur” image editing enthusiasts that take real, high-resolution data from spacecraft and create views that can make you feel like you are standing on the surface of Mars, or out flying around the Solar System.
Gasa Crater on Mars. Rendered using Autodesk Maya and Adobe Photoshop. HiRISE data processed using HiView and gdal. Credit: NASA/JPL/University of Arizona/USGS/image editing by Kevin Gill.
Some of the best data around for these purposes come from the HiRISE camera on board the Mars Reconnaissance Orbiter. Data known as Digital Terrain Model (DTM) files, the HiRISE DTMs are made from two or more images of the same area of a region on Mars, taken from different angles. This data isn’t just for making stunning images or amazing movies. For scientists, DTMs are very powerful research tools, used to take measurements such a elevation information and model geological processes.
So, just how do you go from this DTM image from HiRISE:
DTM image of the Central Peak of Elorza Crater on Mars. Credit: NASA/JPL/University of Arizona/USGS
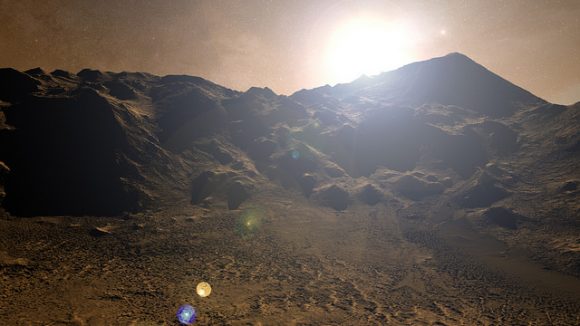
To this amazing image?
Martian sunrise over the Central Peak of Elorza Crater. Rendered using Autodesk Maya and Adobe Photoshop. HiRISE data processed using HiView and gdal. Credit: NASA/JPL/University of Arizona/USGS/image editing by Kevin Gill
I’m going to let Kevin explain it:
To prep the data, I use Photoshop (to convert the JP2 file to a TIFF), and then standard GIS tools like gdal (Geospatial Data Abstraction Library) to create textures for 3D modeling. Using Autodesk Maya, I input those into a material as a color texture (orthoimagery) or displacement map (the DTM data).
I connect that material to a NURBS plane (sort of like a polygon mesh) that is scaled similarly to the physical properties of the data. I set up a camera at a nice angle (it takes a number of low-resolution test renders to get an angle I like) and let it render.
Then I just pull that render into Photoshop where I have a series of monochromatic color tints which gives the image it’s Martian feel. For the sky, I use either a sky from a MSL MastCam image or one that I took outside with my cell phone. If I’m using a sky I took with my cell phone, I’ll adjust the colors to make it look more like it would on Mars. If the colors in the image are still boring at this point, I may run a HDR adjustment on it in Photoshop.
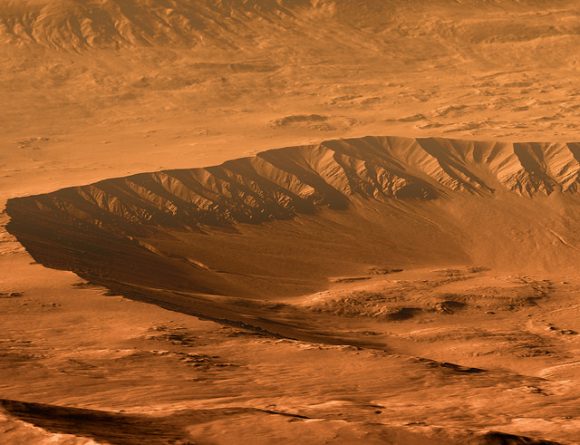
Fissure in the Cerberus region. This false color view of a volcanic fissure in the Cerberus region of Mars was created using a digital terrain model (DTM) from the High Resolution Imaging Science Experiment (HiRISE) camera aboard NASA’s Mars Reconnaissance Orbiter. The horizon was taken from Curiosity Mastcam imagery. Credit: NASA/JPL-Caltech/University of Arizona/ image editing by Kevin Gill.
What all this means is that you can create all these amazing view, plus incredible flyover videos, like this one Kevin put together of Endeavour Crater:
Or you can have some fun and visualize where the Curiosity rover is sitting:
Doin’ Science with Curiosity. Created using HiRIST DTM and Ortho data and NASA model of Curiosity. Rendered using Autodesk Maya and Adobe Photoshop. Curiosity Model: Brian Kumanchik, NASA/JPL-Caltech. Image editing by Kevin Gill.
We’ve written about this type of image editing previously, with the work of the people at UnmannedSpaceflight.com and others. Of course, the image editing software keeps improving, along with all the techniques.
Kevin also wanted to point out the work of other image editing enthusiast, Sean Doran.
“Sean’s work is resulting in views similar to mine,” Kevin said via email. “I know he’s using a process very different from mine, but we are thinking along the same lines in what we want out of the end product. His are quite impressive.”
For example, here is a flyover video of the Opportunity rover sitting along the rim of Endeavour Crater:
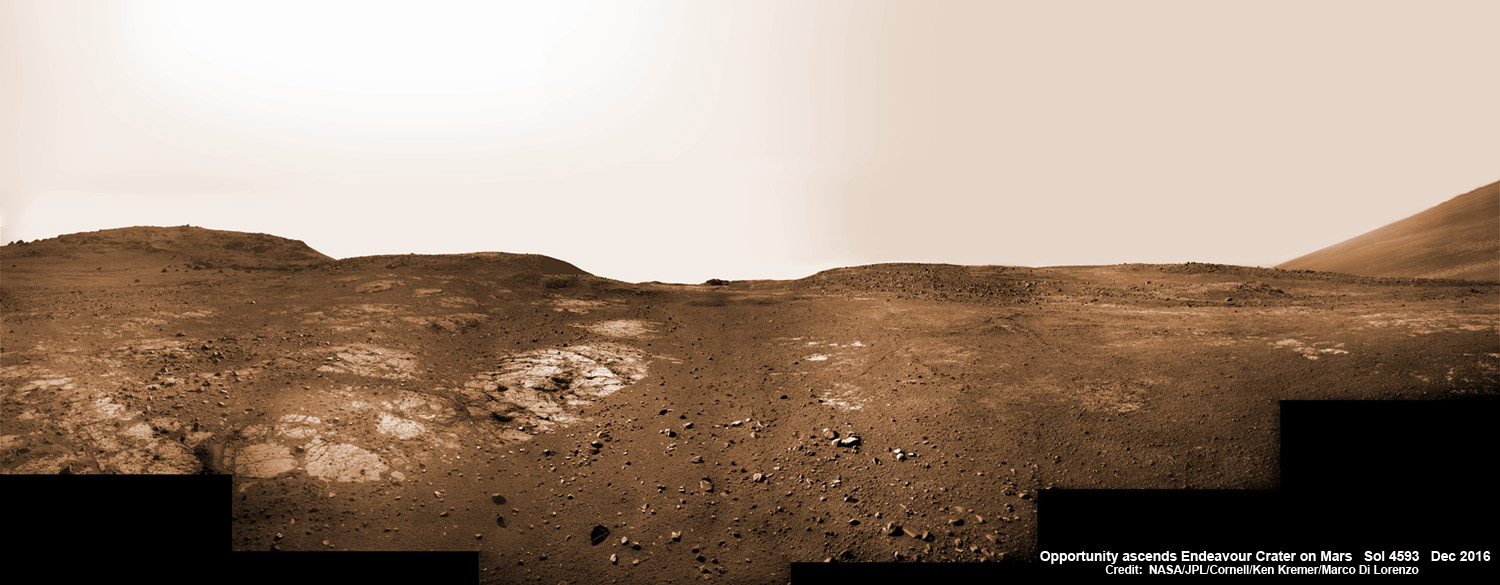
13 Years on Mars! On Christmas Day 2016, NASA’s Opportunity rover scans around vast Endeavour crater as she ascends steep rocky slopes on the way to reach a water carved gully along the eroded craters western rim. This navcam camera photo mosaic was assembled from raw images taken on Sol 4593 (25 Dec. 2016) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
13 Years on Mars!
On Christmas Day 2016, NASA’s Opportunity rover scans around vast Endeavour crater as she ascends steep rocky slopes on the way to reach a water carved gully along the eroded craters western rim. This navcam camera photo mosaic was assembled from raw images taken on Sol 4593 (25 Dec. 2016) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
NASA’s truly outstanding Opportunity rover continues “making new discoveries about ancient Mars” as she commemorates 13 Years since bouncing to a touchdown on Mars, in a feat that is “truly amazing” – the deputy chief scientist Ray Arvidson told Universe Today exclusively.
“Reaching the 13th year anniversary with a functioning rover making new discoveries about ancient Mars on a continuing basis is truly amazing,” Ray Arvidson, Opportunity Deputy Principal Investigator of Washington University in St. Louis, told Universe Today.
Put another way Opportunity is 13 YEARS into her 3 MONTH mission! And still going strong!
During the past year the world famous rover discovered “more extensive aqueous alteration within fractures and more mild alteration within the bedrock outcrops” at Endeavour crater, Arvidson elaborated.
And now she is headed to her next target – an ancient water carved gully!
The gully is situated about 0. 6 mile (1.6 km) south of the robots current location.
But to get there she first has to heroically ascend steep rocky slopes inclined over 20 degrees along the eroded craters western rim – and it’s no easy task! Slipping and sliding along the way and all alone on difficult alien terrain.
Furthermore she is 51 times beyond her “warrantied” life expectancy of merely 90 Sols promised at the time of landing so long ago – roving the surface of the 4th rock from the Sun during her latest extended mission; EM #10.
How was this incredible accomplishment achieved?
“Simply a well-made and thoroughly tested American vehicle,” Arvidson responded.
NASA’s Opportunity rover scans around and across to vast Endeavour crater on Dec. 19, 2016, as she climbs steep slopes on the way to reach a water carved gully along the eroded craters western rim. Note rover wheel tracks at center. This navcam camera photo mosaic was assembled from raw images taken on Sol 4587 (19 Dec. 2016) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
The six wheeled rover landed on Mars on January 24, 2004 PST on the alien Martian plains at Meridiani Planum -as the second half of a stupendous sister act.
Her twin sister Spirit, had successfully touched down 3 weeks earlier on January 3, 2004 inside 100-mile-wide Gusev crater and survived more than six years.
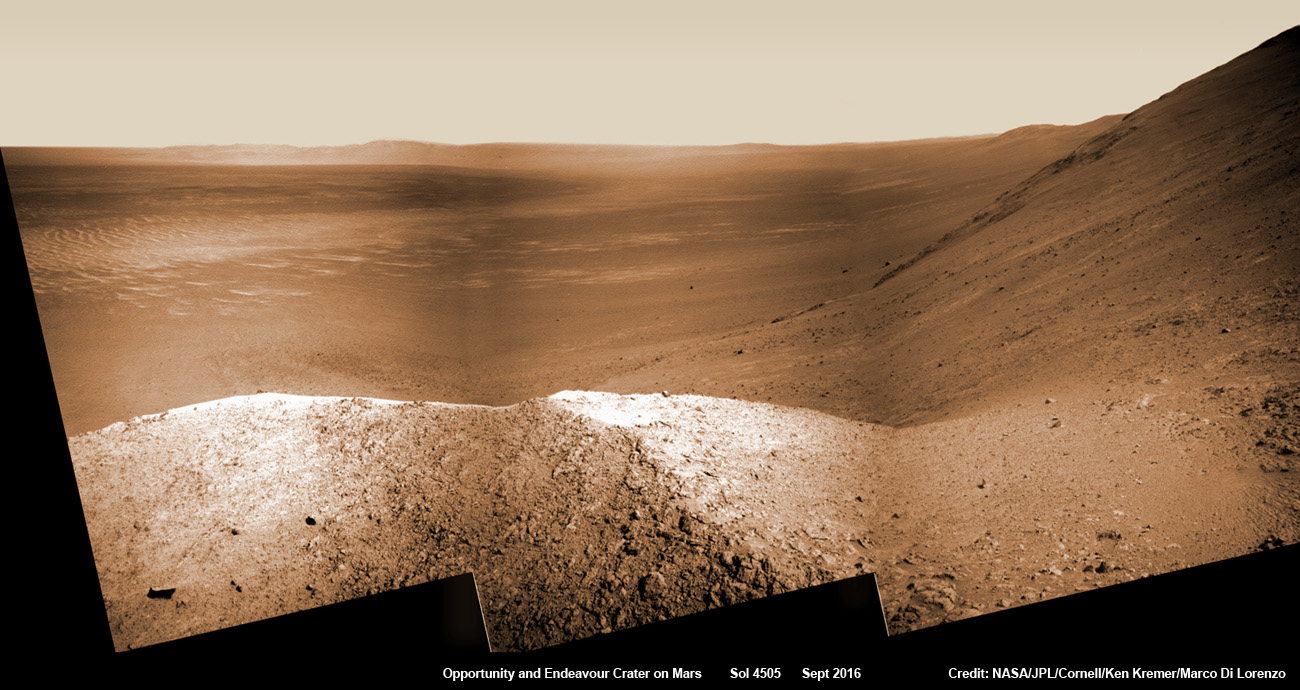
NASA’s Opportunity explores Spirit Mound after descending down Marathon Valley and looks out across the floor of vast Endeavour crater. This navcam camera photo mosaic was assembled from raw images taken on Sol 4505 (25 Sept 2016) and colorized. Credit: NASA/JPL/Cornell/ Ken Kremer/kenkremer.com/Marco Di Lorenzo
Opportunity concluded 2016 and starts 2017 marching relentlessly towards an ancient water carved gully along the eroded rim of vast Endeavour crater – the next science target on her heroic journey traversing across never before seen Red Planet terrains.
Huge Endeavour crater spans some 22 kilometers (14 miles) in diameter.
Throughout 2016 Opportunity was investigating the ancient, weathered slopes around the Marathon Valley location in Endeavour crater. The area became a top priority science destination after the slopes were found to hold a motherlode of ‘smectite’ clay minerals based on data from the CRISM spectrometer circling overhead aboard a NASA Mars orbiter.
The smectites were discovered via extensive, specially targeted Mars orbital measurements gathered by the CRISM (Compact Reconnaissance Imaging Spectrometer for Mars) spectrometer on NASA’s Mars Reconnaissance Orbiter (MRO) – accomplished earlier at the direction of Arvidson.
Opportunity was descending down Marathon Valley the past year to investigate the clay minerals formed in water. They are key to helping determine the habitability of the Red Planet when it was warmer and wetter billions of years ago.
What did Opportunity accomplish scientifically at Marathon Valley during 2016?
“Key here is the more extensive aqueous alteration within fractures and more mild alteration within the bedrock outcrops,” Arvidson explained to me.
“Fractures have red pebbles enhanced in Al and Si (likely by leaching out more soluble elements), hematite, and in the case of our scuffed fracture, enhanced sulfate content with likely Mg sulfates and other phases. Also the bedrock is enriched in Mg and S relative to other Shoemaker rocks and these rocks are the smectite carrier as observed from CRISM ATO data.”
Marathon Valley measures about 300 yards or meters long. It cuts downhill through the west rim of Endeavour crater from west to east – the same direction in which Opportunity drove downhill from a mountain summit area atop the crater rim.
Opportunity has been exploring Endeavour since arriving at the humongous crater in 2011. Endeavour crater was formed when it was carved out of the Red Planet by a huge meteor impact billions of years ago.
“Endeavour crater dates from the earliest Martian geologic history, a time when water was abundant and erosion was relatively rapid and somewhat Earth-like,” explains Larry Crumpler, a science team member from the New Mexico Museum of Natural History & Science.
Opportunity has been climbing up very steep and challenging slopes to reach the top of the crater rim. Then she will drive south to Cape Byron and the gully system.
“We have had some mobility issues climbing steep, rocky slopes. Lots of slipping and skidding, but evaluating the performance of the rover on steep, rocky and soil-covered slopes was one of the approved extended mission objectives,” Arvidson explained.
“We are heading out of Cape Tribulation, driving uphill to the southwest to reach the Meridiani plains and then to drive to the western side of Cape Byron to the head of a gully system.”
What’s ahead for 2017? What’s the importance of exploring the gully?
“Finish up work on Cape Tribulation, traverse to the head of the gully system and head downhill into one or more of the gullies to characterize the morphology and search for evidence of deposits,” Arvidson elaborated.
“Hopefully test among dry mass movements, debris flow, and fluvial processes for gully formation. The importance is that this will be the first time we will acquire ground truth on a gully system that just might be formed by fluvial processes. Will search for cross bedding, gravel beds, fining or coarsening upward sequences, etc., to test among hypotheses.”
How long will it take to reach the gully?
“Months to the gully,” replied Arvidson. After arriving at the top of the crater rim, the rover will actually drive part of the way on the Martian plains again during the southward trek to the gully.
“And we will be driving on the plains to drive relatively long distances with an intent of getting to the gully well before the winter season.”
As of today, Jan 31, 2017, long lived Opportunity has survived 4630 Sols (or Martian days) roving the harsh environment of the Red Planet.
Opportunity has taken over 216,700 images and traversed over 27.26 miles (43.87 kilometers) – more than a marathon.
NASA’s Opportunity rover discovers a beautiful Martian dust devil moving across the floor of Endeavour crater as wheel tracks show robots path today exploring the steepest ever slopes of the 13 year long mission, in search of water altered minerals at Knudsen Ridge inside Marathon Valley on 1 April 2016. This navcam camera photo mosaic was assembled from raw images taken on Sol 4332 (1 April 2016) and colorized. Credit: NASA/JPL/Cornell/ Ken Kremer/kenkremer.com/Marco Di Lorenzo
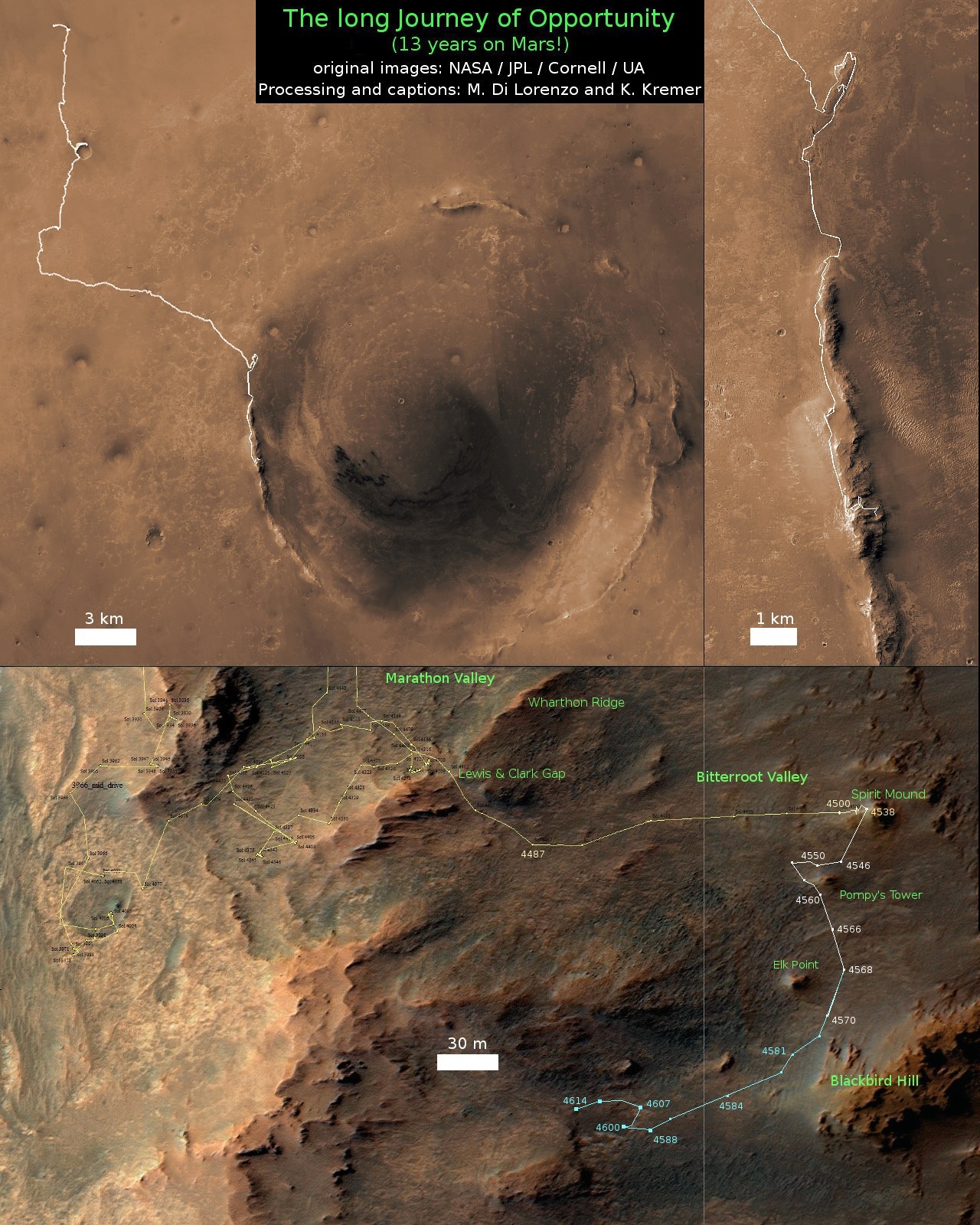
See our updated route map below. It shows the context of the rovers over 13 year long traverse spanning more than the 26 mile distance of a Marathon runners race.
The rover surpassed the 27 mile mark milestone on November 6, 2016 (Sol 4546).
The power output from solar array energy production is currently 416 watt-hours, before heading into another southern hemisphere Martian winter in 2017. It will count as Opportunities 8th winter on Mars.
Meanwhile Opportunity’s younger sister rover Curiosity traverses and drills into the lower sedimentary layers at the base of Mount Sharp.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
13 Year Traverse Map for NASA’s Opportunity rover from 2004 to 2017. This map shows the entire 43 kilometer (27 mi) path the rover has driven on the Red Planet during more than 13 years and more than a marathon runners distance for over 4614 Sols, or Martian days, since landing inside Eagle Crater on Jan 24, 2004 – to current location at the western rim of Endeavour Crater. After descending down Marathon Valley and after studying Spirit Mound, the rover is now ascending back uphill on the way to a Martian water carved gully. Rover surpassed Marathon distance on Sol 3968 after reaching 11th Martian anniversary on Sol 3911. Opportunity discovered clay minerals at Esperance – indicative of a habitable zone – and searched for more at Marathon Valley. Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer/kenkremer.com
Using its HiRISE camera, the MRO has noted existence of tall networks of ridges on Mars that have diverse origins. Credit: NASA/JPL-Caltech/Univ. of Arizona
Mars has some impressive geological features across its cold, desiccated surface, many of which are similar to featured found here on Earth. By studying them, scientists are able to learn more about the natural history of the Red Planet, what kinds of meteorological phenomena are responsible for shaping it, and how similar our two planets are. A perfect of example of this are the polygon-ridge networks that have been observed on its surface.
One such network was recently discovered by the Mars Reconnaissance Orbiter (MRO) in the Medusae Fossae region, which straddles the planet’s equator. Measuring some 16 story’s high, this ridge network is similar to others that have been spotted on Mars. But according to a survey produced by researchers from NASA’s Jet Propulsion Laboratory, these ridges likely have different origins.
This survey, which was recently published in the journal Icarus, examined both the network found in the Medusae Fossae region and similar-looking networks in other regions of the Red Planet. These ridges (sometimes called boxwork rides), are essentially blade-like walls that look like multiple adjoining polygons (i.e. rectangles, pentagons, triangles, and similar shapes).
Shiprock, a ridge-feature in northwestern New Mexico that is 10 meters (30 feet) tall, which formed from lava filling an underground fracture that resisted erosion better than the material around it did. Credit: NASA
While similar-looking ridges can be found in many places on Mars, they do not appear to be formed by any single process. As Laura Kerber, of NASA’s Jet Propulsion Laboratory and the lead author of the survey report, explained in a NASA press release:
“Finding these ridges in the Medusae Fossae region set me on a quest to find all the types of polygonal ridges on Mars… Polygonal ridges can be formed in several different ways, and some of them are really key to understanding the history of early Mars. Many of these ridges are mineral veins, and mineral veins tell us that water was circulating underground.”
Such ridges have also been found on Earth, and appear to be the result of various processes as well. One of the most common involves lava flowing into preexisting fractures in the ground, which then survived when erosion stripped the surrounding material away. A good example of this is the Shiprock (shown above), a monadrock located in San Juan County, New Mexico.
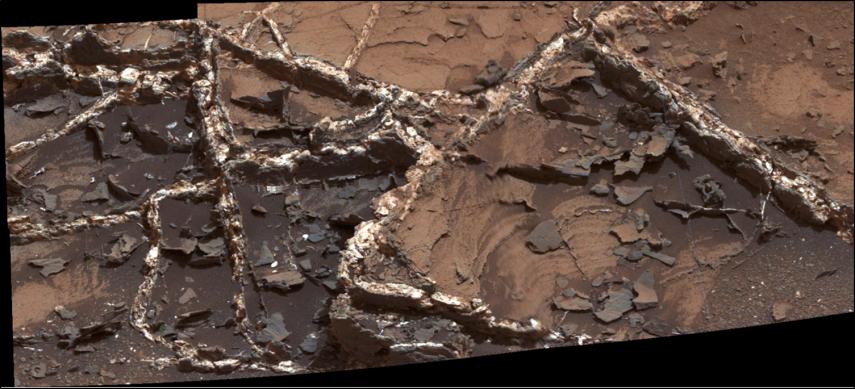
Examples of polygon ridges on Mars include the feature known as “Garden City“, which was discovered by the Curiosity rover mission. Measuring just a few centimeters in height, these ridges appeared to be the result of mineral-laden groundwater moving through underground fissures, which led to standing mineral veins once the surrounding soil eroded away.
Mineral veins at the “Garden City” site, examined by NASA’s Curiosity Mars rover. Credit: NASA/JPL
At the other end of the scale, ridges that measure around 2 kilometers (over a mile) high have also been found. A good example of this is “Inca City“, a feature observed by the Mars Global Surveyor near Mars’ south pole. In this case, the feature is believed to be the result of underground faults (which were formed from impacts) filling with lava over time. Here too, erosion gradually stripped away the surrounding rock, exposing the standing lava rock.
In short, these features are evidence of underground water and volcanic activity on Mars. And by finding more examples of these polygon-ridges, scientists will be able to study the geological record of Mars more closely. Hence why Kerber is seeking help from the public through a citizen-science project called Planet Four: Ridges.
Established earlier this month on Zooniverse – a volunteer-powered research platform – this project has made images obtained by the MRO’s Context Camera (CTX) available to the public. Currently, this and other projects using data from CTX and HiRISE have drawn the participation of more than 150,000 volunteers from around the world.
By getting volunteers to sort through the CTX images for ridge formations, Kerber and her team hopes that previously-unidentified ones will be identified and that their relationship with other Martian features will be better understood.