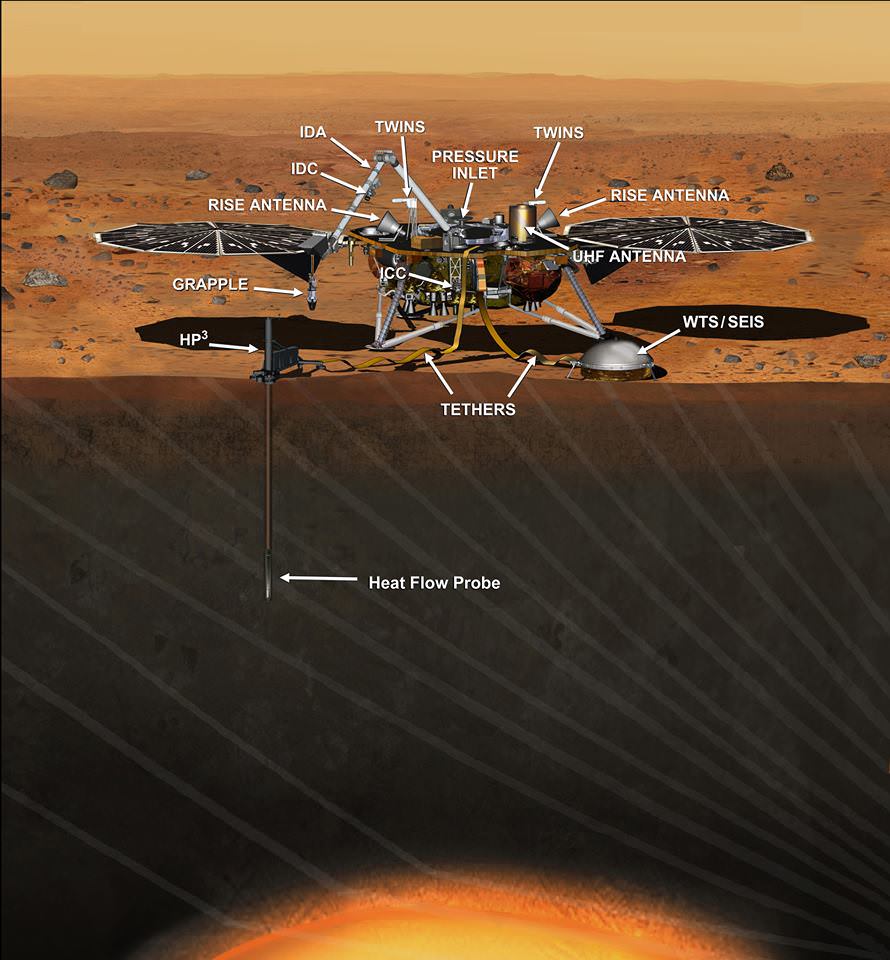
This artist's concept depicts the InSight lander on Mars after the lander's robotic arm has deployed a seismometer and a heat probe directly onto the ground. InSight is the first mission dedicated to investigating the deep interior of Mars. The findings will advance understanding of how all rocky planets, including Earth, formed and evolved. NASA approved a new launch date in May 2018. Credits: NASA/JPL-Caltech
NASA managers have just made the difficult but unavoidable decision to scrub the planned March 2016 launch of the InSight lander, the agency’s next mission to Mars, by at least two years because of a vacuum leak that was just detected in the probes flawed seismometer instrument which cannot be fixed in time.
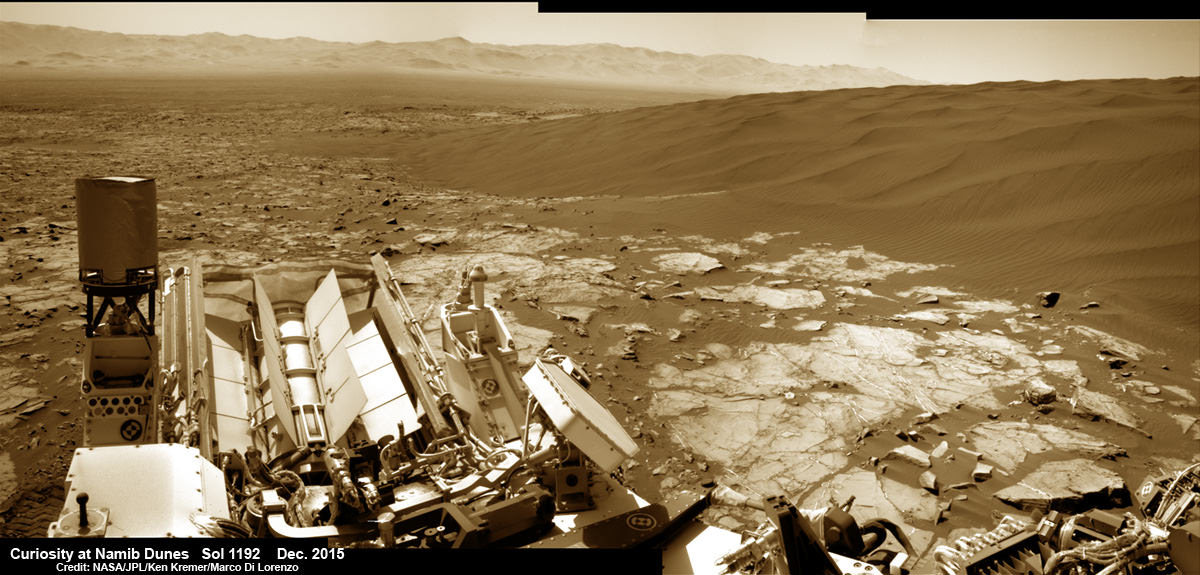
Curiosity explores Namib Dunes at base of Mount Sharp, for first in-place study of an active sand dune anywhere other than Earth. See Gale Crater rim in the distance.This colorized photo mosaic is stitched from navcam camera raw images taken on Sol 1192, Dec. 13, 2015. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Curiosity’s View on Mars Today
Curiosity explores Namib Dunes at base of Mount Sharp, for first in-place study of an active sand dune anywhere other than Earth. See Gale Crater rim in the distance.This colorized photo mosaic is stitched from navcam camera raw images taken on Sol 1192, Dec. 13, 2015. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
After many months of painstaking driving, NASA’s Curiosity Mars rover has reached the edge of a massive field of spectacular rippled sand dunes located at the base of Mount Sharp that range up to two stories tall. And she has now begun humanity’s first up-close investigation of currently active sand dunes anywhere beyond Earth.
Phobos and Deimos, photographed here by the Mars Reconnaissance Orbiter, are tiny, irregularly-shaped moons that are probably strays from the main asteroid belt. Credit: NASA - See more at: http://astrobob.areavoices.com/2013/07/05/rovers-capture-loony-moons-and-blue-sunsets-on-mars/#sthash.eMDpTVPT.dpuf
Many of the planets in our Solar System have a system of moons. But among the rocky planets that make up the inner Solar System, having moons is a privilege enjoyed only by two planets: Earth and Mars. And for these two planets, it is a rather limited privilege compared to gas giants like Jupiter and Saturn which each have several dozen moons.
Whereas Earth has only one satellite (aka. the Moon), Mars has two small moons in orbit around it: Phobos and Deimos. And whereas the vast majority of moons in our Solar System are large enough to become round spheres similar to our own Moon, Phobos and Deimos are asteroid-sized and misshapen in appearance.
According to a new study, EDLS hardware that has been jettisoned on Mars could create problems for future missions to the same landing sites. Credit: NASA
On future missions, a silver, metallic-based thermal control coating will be bonded to the Orion crew module’s back shell tiles. Credit: NASA
In the wake of NASA’s supremely successful inaugural test flight of the Oriondeep space capsule on the EFT-1 mission in Dec. 2014, NASA is beefing up the critical thermal protection system (TPS) that will protect astronauts from the searing heats experienced during reentry as the human rated vehicle plunges through the Earth’s atmosphere after returning from ambitious expeditions to the Moon and beyond.
Based in part on lessons learned from EFT-1, engineers are refining Orion’s heat shield to enhance the design, ease manufacturing procedures and significantly strengthen is heat resistant capabilities for the far more challenging space environments and missions that lie ahead later this decade and planned further out in the future as part of NASA’s agency-wide ‘Journey to Mars’ initiative to send humans to the Red Planet in the 2030s.
The first RS-25 flight engine, No. 2059, is placed on the A-1 Test Stand at Stennis Space Center, Miss. The engines were built by Aerojet Rocketdyne and are being tested in 2015 and 2016 to certify them to fly on NASA’s new Space Launch System (SLS) rocket. SLS-1 will launch on its first uncrewed mission in 2018. Credit: NASA
NASA took another big step on the path to propel our astronauts back to deep space and ultimately on to Mars with the long awaited decision to formally restart production of the venerable RS-25 engine that will power the first stage of the agency’s mammoth Space Launch System (SLS) heavy lift rocket, currently under development.
Aerojet Rocketdyne was awarded a NASA contract to reopen the production lines for the RS-25 powerplant and develop and manufacture a certified engine for use in NASA’s SLS rocket. The contract spans from November 2015 through Sept. 30, 2024.
The SLS is the most powerful rocket the world has ever seen and will loft astronauts in the Orion capsule on missions back to the Moon by around 2021, to an asteroid around 2025 and then beyond on a ‘Journey to Mars’ in the 2030s – NASA’s overriding and agency wide goal. The first unmanned SLS test flight is slated for late 2018.
The core stage (first stage) of the SLS will initially be powered by four existing RS-25 engines, recycled and upgraded from the shuttle era, and a pair of five-segment solid rocket boosters that will generate a combined 8.4 million pounds of liftoff thrust, making it the world’s most powerful rocket ever.
The newly awarded RS-25 engine contract to Sacramento, California based Aerojet Rocketdyne is valued at 1.16 Billion and aims to “modernize the space shuttle heritage engine to make it more affordable and expendable for SLS,” NASA announced on Nov. 23. NASA can also procure up to six new flight worthy engines for later launches.
“SLS is America’s next generation heavy lift system,” said Julie Van Kleeck, vice president of Advanced Space & Launch Programs at Aerojet Rocketdyne, in a statement.
“This is the rocket that will enable humans to leave low Earth orbit and travel deeper into the solar system, eventually taking humans to Mars.”
The lead time is approximately 5 or 6 years to build and certify the first new RS-25 engine, Van Kleek told Universe Today in an interview. Therefore NASA needed to award the contract to Aerojet Rocketdyne now so that its ready when needed.
NASA’s Space Launch System (SLS) blasts off from launch pad 39B at the Kennedy Space Center in this artist rendering showing a view of the liftoff of the Block 1 70-metric-ton (77-ton) crew vehicle configuration. Credit: NASA/MSFC
The RS-25 is actually an upgraded version of former space shuttle main engines (SSMEs) originally built by Aerojet Rocketdyne.
The reusable engines were used with a 100% success rate during NASA’s three decade-long Space Shuttle program to propel the now retired shuttle orbiters to low Earth orbit.
Space Shuttles were powered by a trio of Space Shuttle Main Engines (SSMEs) now recycled and upgraded as RS-25 engines for SLS. Atlantis rolls over from the Orbiter Processing Facility (OPF-1, at right) processing hanger to the Vehicle Assembly Building (VAB, at left) at KSC for the STS-135 mission. Credit: Ken Kremer
Those same engines are now being modified for use by the SLS on missions to deep space starting in 2018.
But NASA only has an inventory of 16 of the RS-25 engines, which is sufficient for a maximum of the first four SLS launches only. Although they were reused numerous times during the shuttle era, they will be discarded after each SLS launch.
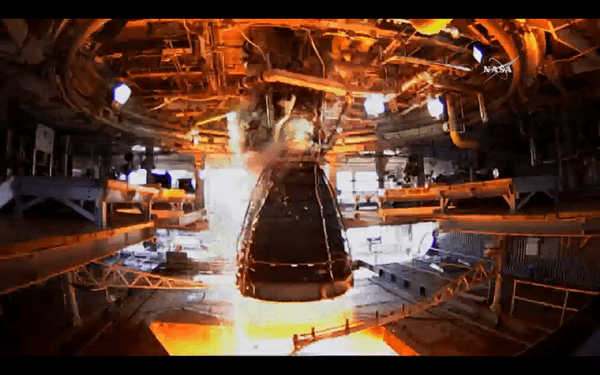
During a 535-second test on August 13, 2015, operators ran the Space Launch System (SLS) RS-25 rocket engine through a series of tests at different power levels to collect engine performance data on the A-1 test stand at NASA’s Stennis Space Center near Bay St. Louis, Mississippi. Credit: NASA
And since the engines cannot be recovered and reused as during the shuttle era, a brand new set of RS-25s will have to be manufactured from scratch.
Therefore, the engine manufacturing process can and will be modernized and significantly streamlined – using fewer part and welds – to cut costs and improve performance.
“The RS-25 engines designed under this new contract will be expendable with significant affordability improvements over previous versions,” added Jim Paulsen, vice president, Program Execution, Advanced Space & Launch Programs at Aerojet Rocketdyne. “This is due to the incorporation of new technologies, such as the introduction of simplified designs; 3-D printing technology called additive manufacturing; and streamlined manufacturing in a modern, state-of-the-art fabrication facility.”
“The new engines will incorporate simplified, yet highly reliable, designs to reduce manufacturing time and cost. For example, the overall engine is expected to simplify key components with dramatically reduced part count and number of welds. At the same time, the engine is being certified to a higher operational thrust level,” says Aerojet Rocketdyne.
The existing stock of 16 RS-25s are being upgraded for use in SLS and also being run through a grueling series of full duration hot fire test firings to certify them for flight, as I reported previously here at Universe Today.
Among the RS-25 upgrades is a new engine controller specific to SLS. The engine controller functions as the “brain” of the engine, which checks engine status, maintains communication between the vehicle and the engine and relays commands back and forth.
RS-25 test firing in progress on the A-1 test stand at NASA’s Stennis Space Center near Bay St. Louis, Mississippi, on Aug. 13, 2015. Credit: NASA
Each of the RS-25’s engines generates some 500,000 pounds of thrust. They are fueled by cryogenic liquid hydrogen and liquid oxygen. For SLS they will be operating at 109% of power, compared to a routine usage of 104.5% during the shuttle era. They measure 14 feet tall and 8 feet in diameter.
They have to withstand and survive temperature extremes ranging from -423 degrees F to more than 6000 degrees F.
The maiden test flight of the SLS is targeted for no later than November 2018 and will be configured in its initial 70-metric-ton (77-ton) version with a liftoff thrust of 8.4 million pounds. It will boost an unmanned Orion on an approximately three week long test flight beyond the Moon and back.
NASA plans to gradually upgrade the SLS to achieve an unprecedented lift capability of 130 metric tons (143 tons), enabling the more distant missions even farther into our solar system.
The first SLS test flight with the uncrewed Orion is called Exploration Mission-1 (EM-1) and will launch from Launch Complex 39-B at the Kennedy Space Center.
Orion’s inaugural mission dubbed Exploration Flight Test-1 (EFT) was successfully launched on a flawless flight on Dec. 5, 2014 atop a United Launch Alliance Delta IV Heavy rocket Space Launch Complex 37 (SLC-37) at Cape Canaveral Air Force Station in Florida.
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
Learn more about SLS, Orion, SpaceX, Orbital ATK Cygnus, ISS, ULA Atlas rocket, Boeing, Space Taxis, Mars rovers, Antares, NASA missions and more at Ken’s upcoming outreach events:
Dec 1 to 3: “Orbital ATK Atlas/Cygnus launch to the ISS, ULA, SpaceX, SLS, Orion, Commercial crew, Curiosity explores Mars, Pluto and more,” Kennedy Space Center Quality Inn, Titusville, FL, evenings
Dec 8: “America’s Human Path Back to Space and Mars with Orion, Starliner and Dragon.” Amateur Astronomers Assoc of Princeton, AAAP, Princeton University, Ivy Lane, Astrophysics Dept, Princeton, NJ; 7:30 PM.
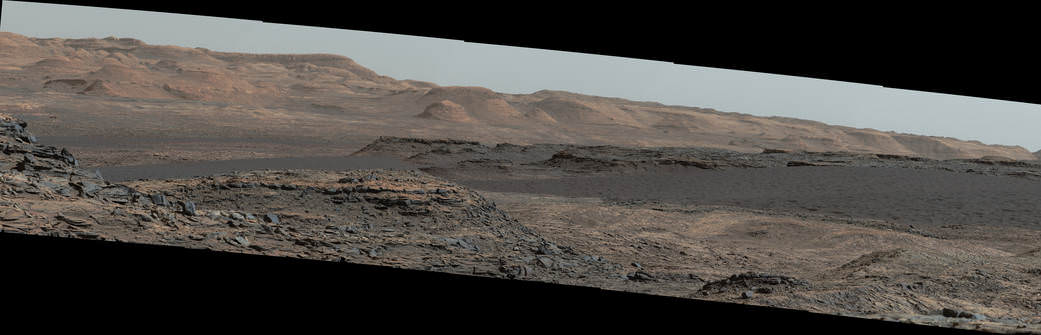
The dark band in the lower portion of this Martian scene is part of the "Bagnold Dunes" dune field lining the northwestern edge of Mount Sharp. The view combines multiple images taken with the Mast Camera on Curiosity on Sept. 25, 2015, Sol 1115th. The images are from Mastcam's right-eye camera, which has a telephoto lens. The view is toward south-southeast. The scene is white balanced. Credits: NASA/JPL-Caltech/MSSS
NASA’s Curiosity rover is on the Martian road to soon start the first ever study of currently active sand dunes anywhere beyond Earth. The dunes are located nearby, at the foothills of Mount Sharp, and Curiosity is due to arrive for an up close look in just a few days to start her unique research investigations.
The eerily dark dunes, named the “Bagnold Dunes,” skirt the northwestern flank of Mount Sharp. Ascending and diligently exploring the sedimentary layers of Mount Sharp is the primary goal of the mission.
“The ‘Bagnold Dunes’ are tantalizingly close,” says Ken Herkenhoff, Research Geologist at the USGS Astrogeology Science Center and an MSL science team member, in a mission update on Wednesday, Nov. 18.
The “Bagnold Dunes” have been quite noticeable in numerous striking images taken from Marsorbit, during the vehicles nail biting ‘7 Minutes of Terror’ descent from orbit, as well as in thousands upon thousands of images taken by Curiosity herself as the robot edged ever closer during her over three year long traverse across the floor of the Gale Crater landing site.
Curiosity must safely cross the expansive dune field before climbing Mount Sharp.
Although multiple NASA rovers, including Curiosity, have studied much smaller Martian sand ripples or drifts, none has ever visited and investigated up close these types of large dunes that range in size as tall as a two story building or more and as wide as a football field or more.
Moreover the Martian dunes are shifting even today.
“Shifting sands lie before me,” Curiosity tweeted. “Off to image, scoop and scuff active dunes on Mars. I’ll be the first craft to visit such dunes beyond Earth!”
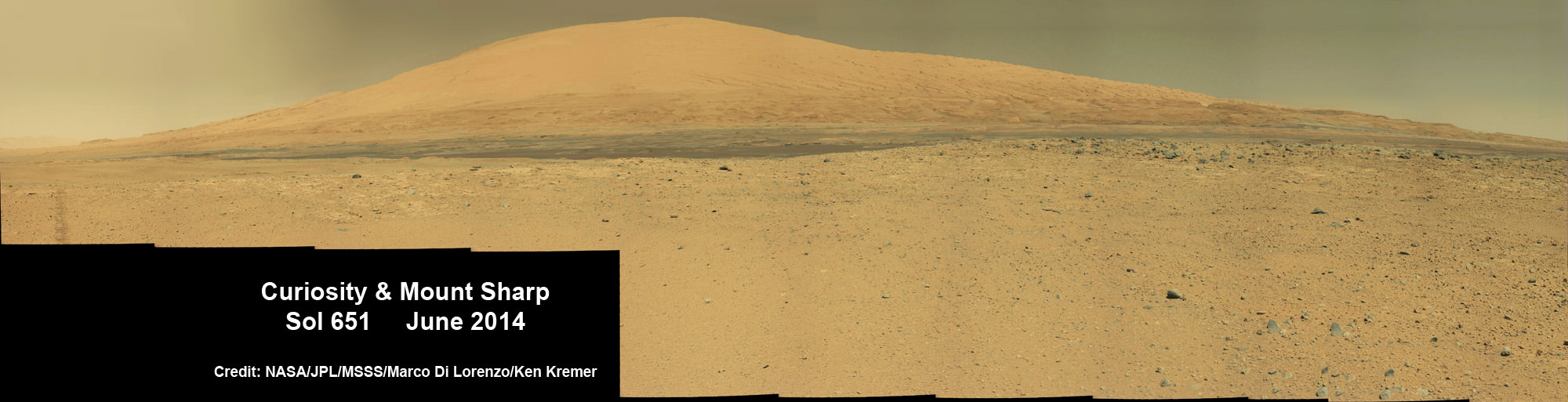
Mount Sharp and dark Bagnold Dunes
Curiosity rover panorama of Mount Sharp captured on June 6, 2014 (Sol 651) during traverse inside Gale Crater. Note rover wheel tracks at left. She will eventually ascend the mountain at the ‘Murray Buttes’ at right later this year. Assembled from Mastcam color camera raw images and stitched by Marco Di Lorenzo and Ken Kremer. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer-kenkremer.com
“The Bagnold Dunes are active: Images from orbit indicate some of them are migrating as much as about 3 feet (1 meter) per Earth year. No active dunes have been visited anywhere in the solar system besides Earth,” notes NASA.
Curiosity is currently only some 200 yards or meters away from the first dune she will investigate, simply named “Dune 1.”
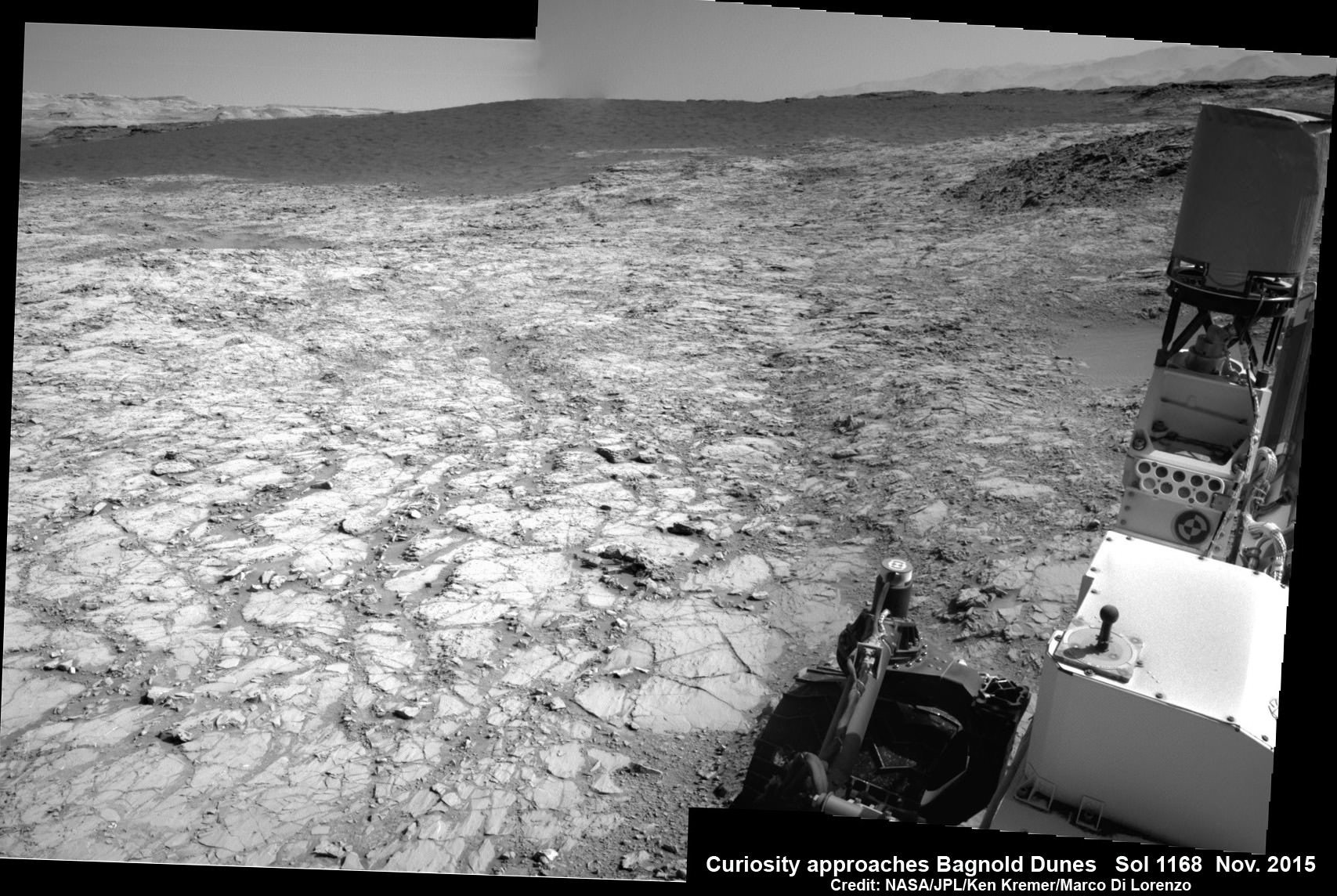
Curiosity approaches the dark Bagnold Dunes for first in-place study of an active sand dune anywhere other than Earth. This photo mosaic is stitched from navcam camera raw images taken on Sol 1168, Nov. 18, 2015. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
As the rover approaches closer and closer, the dune research campaign is already in progress as she snaps daily high resolution images and gathers measurements of the area’s wind direction and speed.
“We’ve planned investigations that will not only tell us about modern dune activity on Mars but will also help us interpret the composition of sandstone layers made from dunes that turned into rock long ago,” said Bethany Ehlmann of the California Institute of Technology and NASA’s Jet Propulsion Laboratory, in Pasadena, California, in a statement.
After arriving at the dune, the team will command Curiosity to scoop up samples for analysis by the rover’s pair of miniaturized chemistry instruments inside its belly. It will also scuff the dune with a wheel to examine and compare the surface and interior physical characteristics.
This Sept. 25, 2015, view from the Mast Camera on NASA’s Curiosity Mars rover shows a dark sand dune in the middle distance. The rover’s examination of dunes on the way toward higher layers of Mount Sharp will be the first in-place study of an active sand dune anywhere other than Earth. Credits: NASA/JPL-Caltech/MSSS
The dark dunes are informally named after British military engineer Ralph Bagnold (1896-1990), who conducted pioneering studies of the effect of wind on motion of individual particles in dunes on Earth. Curiosity will carry out “the first in-place study of dune activity on a planet with lower gravity and less atmosphere.”
Although the huge Bagnold dunes are of great scientific interest, the team will also certainly exercise caution in maneuvering the car sized six wheel robot.
Recall that NASA’s smaller golf cart Spirit Mars rover perished a few years back – albeit over 6 years into her 3 month mission – when the robot became unexpectedly mired in a nearly invisible sand ripple from which she was unable to escape.
Likewise, sister Opportunity got stuck in a sand ripple earlier in her mission that took the engineering team weeks of painstaking effort to extricate from a spot subsequently named ‘Purgatory’ that resulted in many lessons learned for future operations.
Opportunity is still hard at work – currently exploring Marathon Valley – nearly a dozen years into her planned 3 month mission.
Based on orbital observations by the CRISM and HiRISE instruments aboard NASA’s Mars Reconnaissance Orbiter, the science team has concluded that the Bagnold Dunes are mobile and also have an uneven distribution of minerals, such as olivine.
“We will use Curiosity to learn whether the wind is actually sorting the minerals in the dunes by how the wind transports particles of different grain size,” Ehlmann said.
“If the Bagnold campaign finds that other mineral grains are sorted away from heavier olivine-rich grains by the wind’s effects on dune sands, that could help researchers evaluate to what extent low and high amounts of olivine in some ancient sandstones could be caused by wind-sorting rather than differences in alteration by water,” say researchers.
“These dunes have a different texture from dunes on Earth,” said team member Nathan Bridges, of the Johns Hopkins University’s Applied Physics Laboratory, Laurel, Maryland.
“The ripples on them are much larger than ripples on top of dunes on Earth, and we don’t know why. We have models based on the lower air pressure. It takes a higher wind speed to get a particle moving. But now we’ll have the first opportunity to make detailed observations.”
Last month Curiosity conducted her eighth drill campaign for sample chemical analysis at the ‘Big Sky’ site, before moving on to ‘Greenhorn’. Big Sky was an area of cross-bedded sandstone rock in the Stimson geological unit on the lower slopes of Mount Sharp.
NASA Curiosity rover reaches out with robotic arm to drill into cross-bedded sandstone rock at ‘Big Sky’ target on Sol 1119, Sept. 29, 2015, in this photo mosaic stitched from navcam camera raw images and colorized. Big Sky is located in the Stimson unit on the lower slopes of Mount Sharp inside Gale Crater. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Curiosity has already accomplished her primary objective of discovering a habitable zone on the Red Planet – at the Yellowknife Bay area – that contains the minerals necessary to support microbial life in the ancient past when Mars was far wetter and warmer billions of years ago.
As of today, Sol 1168, November 19, 2015, she has driven over 6.9 miles (11.1 kilometers) kilometers and taken over 282,100 amazing images.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
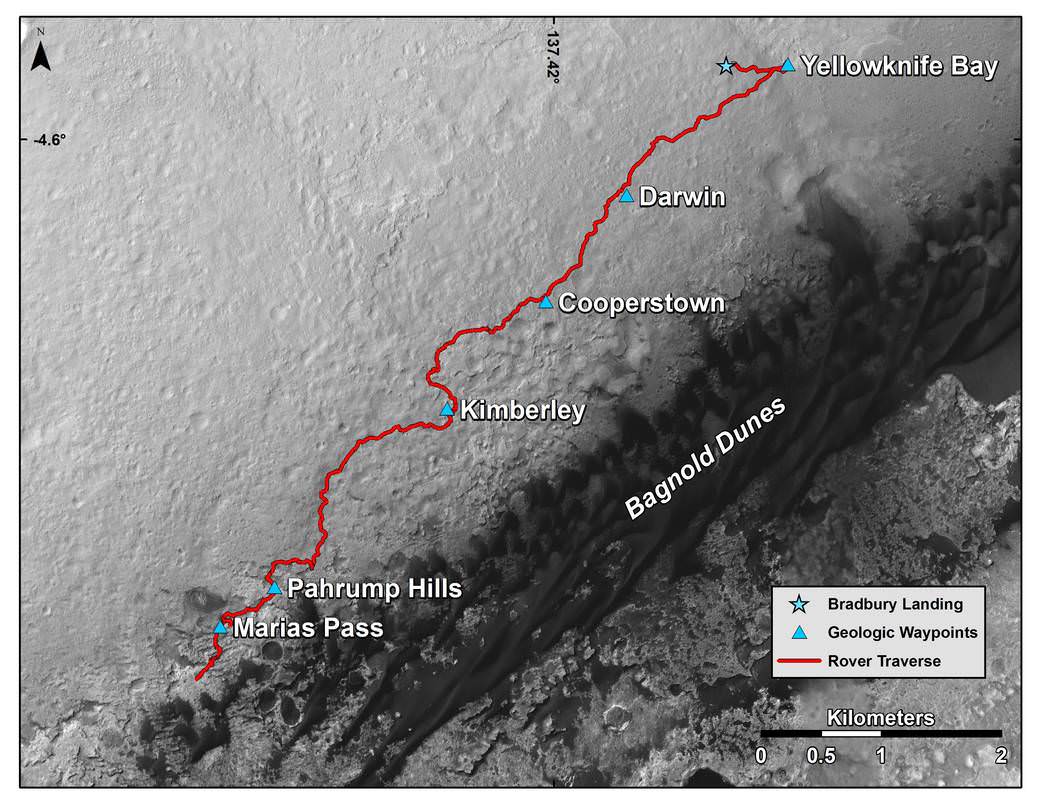
This map shows the route driven by NASA’s Curiosity Mars rover from the location where it landed in August 2012 to its location in mid-November 2015 through Sol 1165, approaching examples of dunes in the “Bagnold Dunes” dune field. Credits: NASA/JPL-Caltech/Univ. of Arizona
………….
Learn more about Orbital ATK Cygnus, ISS, ULA Atlas rocket, SpaceX, Boeing, Space Taxis, Mars rovers, Orion, SLS, Antares, NASA missions and more at Ken’s upcoming outreach events:
Dec 1 to 3: “Orbital ATK Atlas/Cygnus launch to the ISS, ULA, SpaceX, SLS, Orion, Commercial crew, Curiosity explores Mars, Pluto and more,” Kennedy Space Center Quality Inn, Titusville, FL, evenings
Dec 8: “America’s Human Path Back to Space and Mars with Orion, Starliner and Dragon.” Amateur Astronomers Assoc of Princeton, AAAP, Princeton University, Ivy Lane, Astrophysics Dept, Princeton, NJ; 7:30 PM.
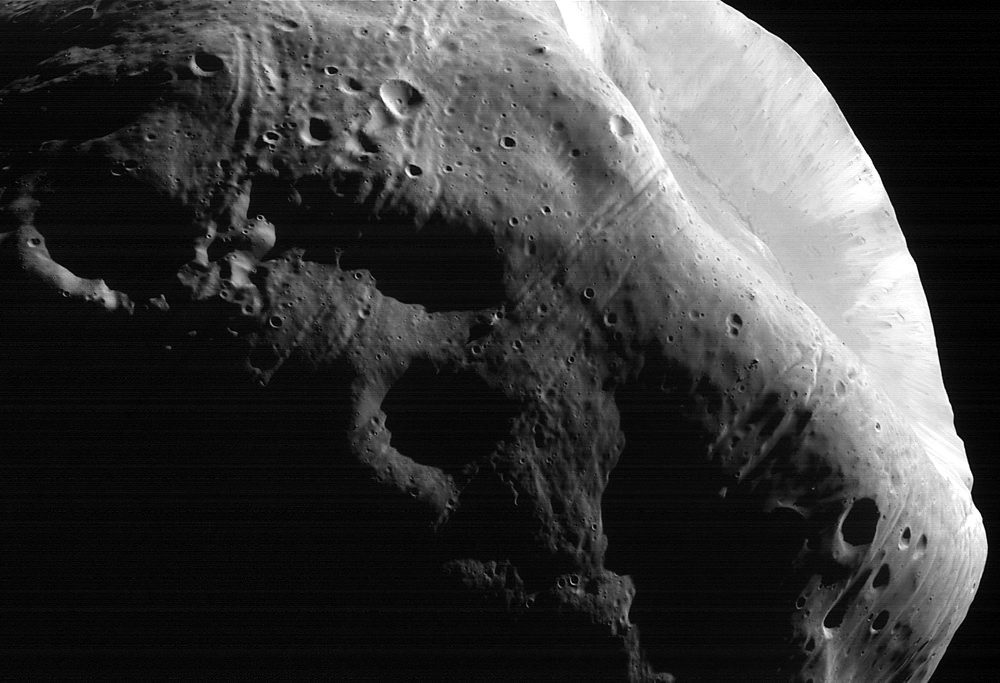
New modeling indicates that the grooves on Mars’ moon Phobos could be produced by tidal forces – the mutual gravitational pull of the planet and the moon. Initially, scientists had thought the grooves were created by the massive impact that made Stickney crater (lower right). Credit: NASA/JPL-Caltech/University of Arizona
We’ve said it before: Mars’ moon Phobos is doomed. But a new study indicates it might be worse than we thought.
One of the most striking features we see on images of Phobos is the parallel sets of grooves on the moon’s surface. They were originally thought to be fractures caused by an impact long ago. But scientists now say the grooves are early signs of the structural failure that will ultimately destroy this moon.
“We think that Phobos has already started to fail, and the first sign of this failure is the production of these grooves,” said Terry Hurford, from NASA’s Goddard Space Flight Center.
Why is Phobos falling apart?
Two words: tidal forces.
Phobos orbits closer to its planet than any moon in the Solar System. As it orbits just 6,000 km (3,700 miles) above Mars, and the planet’s gravity is pulling Phobos in closer and closer; it is also tearing Phobos apart. Scientists estimate the ultimate destruction of this tiny moon (22 kilometers/13.5-miles in diameter) might take place in about 30 to 50 million years.
It only take about 7.5 hours for Phobos to complete an orbit around the planet, while Mars takes almost 25 hours to complete one rotation on its axis. So Phobos travels three times around the planet for every Martian day. And as Fraser explains in this video, this is a problem.
Mars’ gravity is pulling in Phobos closer by about 2 meters (6.6 feet) every hundred years. The orbit will get lower and lower until it reaches a level known as the Roche Limit. This is the point where the tidal forces between the two sides of the moon are so different that it gets torn apart.
Hurford and his colleagues, who presented their latest findings at the annual Meeting of the Division of Planetary Sciences of the American Astronomical Society this week, also delivered other bad news about the interior of Phobos – which could ultimately speed up the demise of the moon. Phobos’ insides are likely to be just a big pile of rubble — barely holding together — surrounded by a layer of powdery regolith about 100 meters (330 feet) thick.
“The funny thing about the result is that it shows Phobos has a kind of mildly cohesive outer fabric,” said Erik Asphaug of the School of Earth and Space Exploration at Arizona State University in Tempe and a co-investigator on the study. “This makes sense when you think about powdery materials in microgravity, but it’s quite non-intuitive.”
Phobos’ Stickney Crater. Credit: NASA.
Phobos’ grooves have long been an issue up for debate. As mentioned previously, one idea is that the grooves were associated with the impact that formed Stickney Crater, a big 10 km-wide crater that dominates one side of Phobos. However, scientists eventually determined that the grooves don’t radiate outward from the crater itself but from a focal point nearby. Another idea is they came from Phobos moving through streams of debris thrown up from impacts 6,000 km away on the surface of Mars, with each ‘family’ of grooves corresponding to a different impact event.
But new modeling by Hurford and his team supports the idea that the grooves are more like “stretch marks” that occur when Phobos gets deformed by tidal forces.
The team said that stress fractures predicted by their model coincide with the grooves seen in images of Phobos. This explanation also fits with the observation that some grooves are younger than others, which would be the case if the process that creates them is ongoing.
Huford also said the same fate may await Neptune’s moon Triton, which is also slowly falling inward and has a similarly fractured surface. The work also has implications for extrasolar planets, according to researchers.
“We can’t image those distant planets to see what’s going on, but this work can help us understand those systems, because any kind of planet falling into its host star could get torn apart in the same way,” said Hurford.
Here’s a video showing Mars Express images of Phobos over the last 10 years. The images show the grooves running across the small moon:
NASA’s Opportunity rover peers outwards across to the vast expense of Endeavour Crater from current location descending along steep walled Marathon Valley in early November 2015. Marathon Valley holds significant deposits of water altered clay minerals holding clues to the planets watery past. Shadow of Pancam Mast assembly and robots deck visible at right. This navcam camera photo mosaic was assembled from images taken on Sol 4181 (Oct. 29, 2015) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
NASA’s Opportunity rover peers outwards across to the vast expense of Endeavour Crater from current location descending along steep walled Marathon Valley in early November 2015. Marathon Valley holds significant deposits of water altered clay minerals holding clues to the planets watery past. Shadow of Pancam Mast assembly and robots deck visible at right. This navcam camera photo mosaic was assembled from images taken on Sol 4181 (Oct. 29, 2015) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Just shy of an unfathomable 4200 Sols traversing ravishing alien terrain on the Red Planet, the longest living ‘Martian’ – NASA’s robot ‘Opportunity’ – is driving between “lily pads” down steep walled Marathon Valley in search of life giving sun that enables spectacular science yielding clues to Marswatery past. All this as she strives to survive utterly harsh climate extremes, because ‘winter is coming’ for her seventh time on the fourth rock from the sun!
“Opportunity is driving east and southeast down Marathon Valley, bisecting the region in which we detect smectites [clay minerals] using CRISM [spectrometer] data,” Opportunity Deputy Principal Investigator Ray Arvidson, of Washington University in St. Louis, told Universe Today.
Artist’s rendering of a solar storm hitting Mars and stripping ions from the planet's upper atmosphere. Credits: NASA/GSFC
NASA’s Mars Atmosphere and Volatile Evolution (MAVEN) orbiter mission has determined that ancient Mars suffered drastic climate change and lost its thick atmosphere and surface bodies of potentially life giving liquid water because it lost tremendous quantities of gas to space via stripping by the solar wind, based on new findings that were announced today, Nov. 5, at a NASA media briefing and in a series of scientific publications.
The process of Mars dramatic transformation from a more Earth-like world to its barren state today started about 4.2 Billion years ago as the shielding effect of the global magnetic field was lost as the planets internal dynamo cooled, Bruce Jakosky, MAVEN principal investigator at the Laboratory for Atmospheric and Space Physics (LASP) at the University of Colorado, Boulder, told Universe Today.
The radical transformation of ancient Mars from a warm world with significant bodies of standing water that could have supported life, to its current state as a cold, arid and desert-like world that’s rather inhospitable to life was caused by the loss of most the planet’s atmosphere as powerful streams of solar wind particles crashed into it and stripped it away due to the loss of the protective magnetic field as the planets core cooled.
“We think that the early magnetic field that Mars had would have protected the planet from direct impact by the solar wind and would have kept it from stripping gas off,” Jakosky told me.
“So it would have been the turn off of the magnetic field, that would have allowed the turn on of stripping of the atmosphere by the solar wind.”
“The evidence suggests that the magnetic field disappeared about 4.2 Billion years ago.”
The period of abundant surface water actively carving the Martian geology lasted until about 3.7 Billion years ago. The loss of the atmosphere by stripping of the solar wind took place from about 4.2 to 3.7 Billion years ago.
Billions of years ago, Mars was a very different world. Liquid water flowed in long rivers that emptied into lakes and shallow seas. A thick atmosphere blanketed the planet and kept it warm. Credit: NASA
With the release of today’s results, the MAVEN science team has accomplished the primary goal of the mission, which was to determine how and why Mars lost its early, thick atmosphere and water over the past four billion years. The atmosphere is composed mostly of carbon dioxide.
Since water is a prerequisite for life as we know it, determining its fate and longevity on Mars is crucial for determining the habitability of the Red Planet and its potential for supporting martian microbes, past of present if they ever existed.
“The NASA Mars exploration program has been focused on finding water,” said Michael Meyer, lead scientist for the Mars Exploration Program at NASA Headquarters.
“Water is the prime ingredient needed for life. It is a major factor in the climate and for shaping geology. And it is a critical resource for future human exploration.”
This NASA video shows a visualization of the solar wind striking Mars:
Video caption: Created using data from NASA’s Mars Atmosphere and Volatile Evolution (MAVEN) mission, this visualization shows how the solar wind strips ions from the Mars’ upper atmosphere into space. Credits: NASA-GSFC/CU Boulder LASP/University of Iowa
MAVEN arrived in orbit at Mars just over one year ago on Sept. 21, 2014.
The $671 Million MAVEN spacecraft’s goal is to study Mars tenuous upper atmosphere in detail for the very first time by any spacecraft and to explore the mechanisms of how the planet lost its atmosphere and life giving water over billions of years as well as determine the rate of atmospheric loss.
The new MAVEN data have enabled researchers to measure the rate of Mars atmospheric loss of gas to space via the action of solar wind stripping as well as the erosional effect of solar storms.
Based on measurements from MAVEN’s suite of nine state-of-the-art scientific instruments, the solar wind is stripping away gas at a rate of about 100 grams (equivalent to roughly 1/4 pound) every second today, in the form of carbon dioxide and oxygen, said David Brain, MAVEN co-investigator at LASP.
“Most of the stripping [of the Martian atmosphere] by the solar wind at Mars was thought to have taken place very early in the history of the solar system when the sun was much more active and when the solar wind was more intense. So today the rate of loss at Mars is low,” Jakosky said at the briefing.
“Today’s Mars is a cold dry desert-like environment. The atmosphere is thin and it’s not capable of sustaining liquid water at the surface today, it would freeze or evaporate very quickly. However when we look at ancient Mars we see a different type of surface, one that had valleys that looked like they were carved by water and lakes that were standing for long periods of time. We see an environment that was much more able to support liquid water.”
The MAVEN results were published today in nearly four dozen scientific papers in the Nov. 5 issues of the journals Science and Geophysical Research Letters.
I asked Jakosky; How much gas would have been lost from ancient Mars and what is the rough estimate for the ancient rate of loss to arrive at Mars thin atmosphere today?
“For the amount of gas that we think you would have to have been removed – let me start with the current Mars atmosphere which has a thickness of 6 millibars, that’s just under 1% as thick as the Earth’s atmosphere,” Jakosky replied.
“So we think you would have to remove an amount of gas that is about equivalent to what’s in Earth’s atmosphere today.”
“So the rate would have to have been a factor of about 100 to 1000 times higher, than today’s loss of 100 grams per second in order to have removed the gas early in that time period, which is consistent with what the models have predicted that the loss rate would have been back then in early history.”
NASA’s Mars Atmosphere and Volatile EvolutioN (MAVEN) spacecraft celebrated one Earth year in orbit around Mars on Sept. 21, 2015. MAVEN was launched to Mars on Nov. 18, 2013 from Cape Canaveral Air Force Station in Florida and successfully entered Mars’ orbit on Sept. 21, 2014. Credit: NASA
What is the solar wind and how does it strip away the atmosphere?
“The solar wind is a stream of particles, mainly protons and electrons, flowing from the sun’s atmosphere at a speed of about one million miles per hour. The magnetic field carried by the solar wind as it flows past Mars can generate an electric field, much as a turbine on Earth can be used to generate electricity. This electric field accelerates electrically charged gas atoms, called ions, in Mars’ upper atmosphere and shoots them into space,” according to a NASA description.
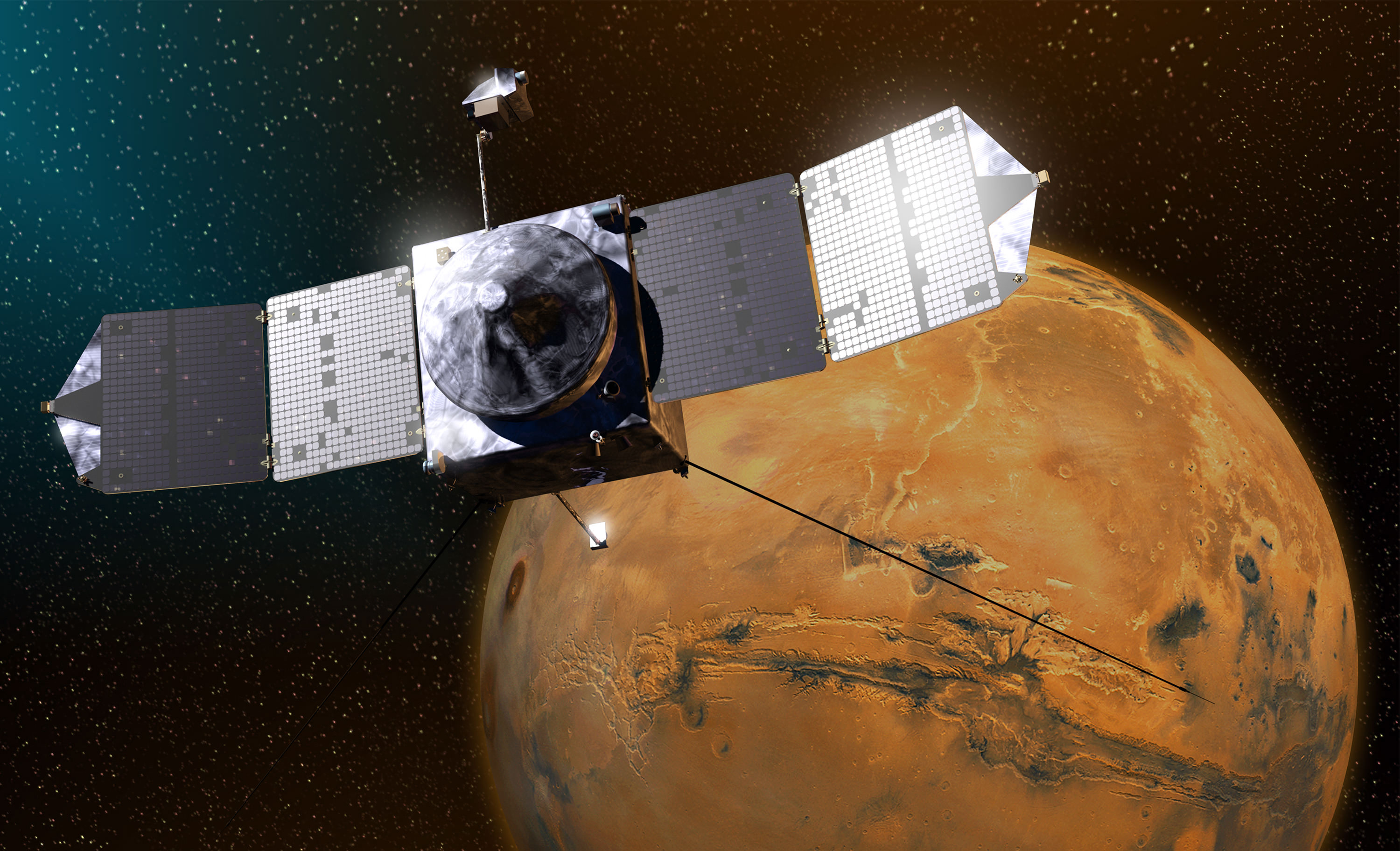
MAVEN is NASA’s next Mars orbiter and is due to blastoff on Nov. 18 from Cape Canaveral, Florida. It will study the evolution of the Red Planet’s atmosphere and climate. Universe Today visited MAVEN inside the clean room at the Kennedy Space Center. With solar panels unfurled, this is exactly how MAVEN looks when flying through space and circling Mars. Credit: Ken Kremer/kenkremer.com
MAVEN is just now completing its primary mission and starts the extended mission phase on Nov. 16.
The 5,400 pound MAVEN probe carries nine sensors in three instrument suites to study why and exactly when did Mars undergo the radical climatic transformation.
MAVEN’s observations will be tied in with NASA’s ongoing Curiosity and Opportunity surface roving missions as well as MRO and Mars Odyssey to provide the most complete picture of the fourth rock from the sun that humanity has ever had.
MAVEN thundered to space on Nov. 18, 2013 following a flawless blastoff from Cape Canaveral Air Force Station’s Space Launch Complex 41 atop a powerful United Launch Alliance Atlas V rocket.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
NASA’s MAVEN Mars orbiter, chief scientist Prof. Bruce Jakosky of CU-Boulder and Ken Kremer of Universe Today inside the clean room at the Kennedy Space Center on Sept. 27, 2013. MAVEN launched to Mars on Nov. 18, 2013 from Florida. Credit: Ken Kremer/kenkremer.com
A tri-planetary grouping from the morning of October 31st. Image credit and copyright: Joseph Brimacombe
So, did this past weekend’s shift back to Standard Time for most of North America throw you for a loop? Coming the day after Halloween, 2015 was the earliest we can now shift back off Daylight Saving Time. Sunday won’t fall on November 1st again until 2020. Expect evenings get darker sooner for northern hemisphere residents, while the planetary action remains in the dawn sky.
Though Mercury has exited the morning twilight stage, the planets Jupiter, Venus and Mars continue to put on a fine show, joined by the waning crescent Moon later this week. The action starts today on November 3rd, which finds +1.9 magnitude Mars passing just 0.68 degrees (40’, just over the apparent diameter of a Full Moon) from brilliant -3.9 magnitude Venus. Though the two nearest planets to the Earth appear to meet up in the dawn sky, Mars is actually 2.5 times more distant than Venus, which sits 74.4 million miles (124 million kilometres) from the Earth. Venus exhibits a 57% illuminated gibbous phase 21” across this week, versus Mars’ paltry 4.5” disc.
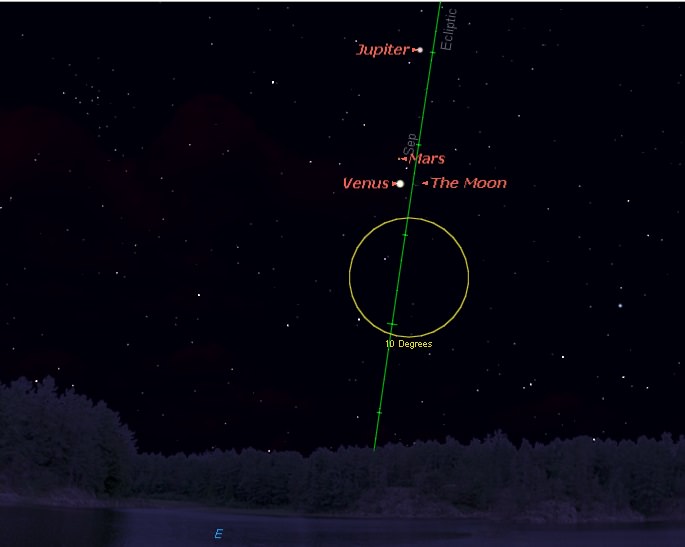
The lunar planetary lineup on the morning of November 6th… Image credit: Starry Night Education Software
Watch the scene shift, as the Moon joins the dance this weekend. The mornings of Friday, November 6th and Saturday, November 7th are key, as the Moon passes just two degrees from the Jupiter and Mars pair and just over one degree from Venus worldwide. Similar close pairings of the Moon and Venus adorn many national flags, possibly inspired by a close grouping of Venus and the Moon witnessed by skywatchers of yore.
… and the view the next morning on November 7th. Image credit: Starry Night Education software
Saturday November 7th is also a fine time to try your hand at seeing Venus in the daytime, using the nearby crescent Moon as a guide. The Moon will be only four days from New, and the pair will be 46 degrees west of the Sun, an optimal situation as Venus just passed greatest western elongation 46.4 degrees west of the Sun on October 26th.
Mars meets Venus on November 3rd-4th… the center circle = 1 degree FoV. Image credit: Stellarium
Though Venus may seem like a difficult daytime object, it’s actually intrinsically brighter than the Moon per square arc second. Difficulty finding it stems from seeing it against a low contrast blue daytime sky, its small size, and lack of context and depth. The larger but dimmer Moon actually serves as a good anchor to complete this feat of visual athletics.
Venus from the morning of November 3rd. Image credit and copyright: Shahrin Ahmad
Looking for more? Comet C/2013 US10 Catalina will join the planetary lineup next lunation ‘round, hopefully shining at magnitude +5 as it glides past Venus and the Moon on December 7th. Karl Battams at the U.S. Naval Research Labs has confirmed that Comet US10 Catalina—which reaches perihelion this month on November 15th –should also briefly graze the field of view for SOHO’s LASCO C3 camera on November 7th.
There’s also a few notable lunar occultations this week. The Moon also occults the +5 magnitude star Chi Leonis for viewers around the Gulf of Mexico on November 4th, including a dramatic grazing event for Northern Florida. The Moon also occults the +3.5 magnitude star Omicron Leonis on Nov 4th for Alaska as well.
The occultation footprint for Chi Leonis. The solid lines indicate where the event will occur during darkness and twilight hours, while the dashed lines denote where the event transpires during the daytime. Image credit: Occult 4.2 software
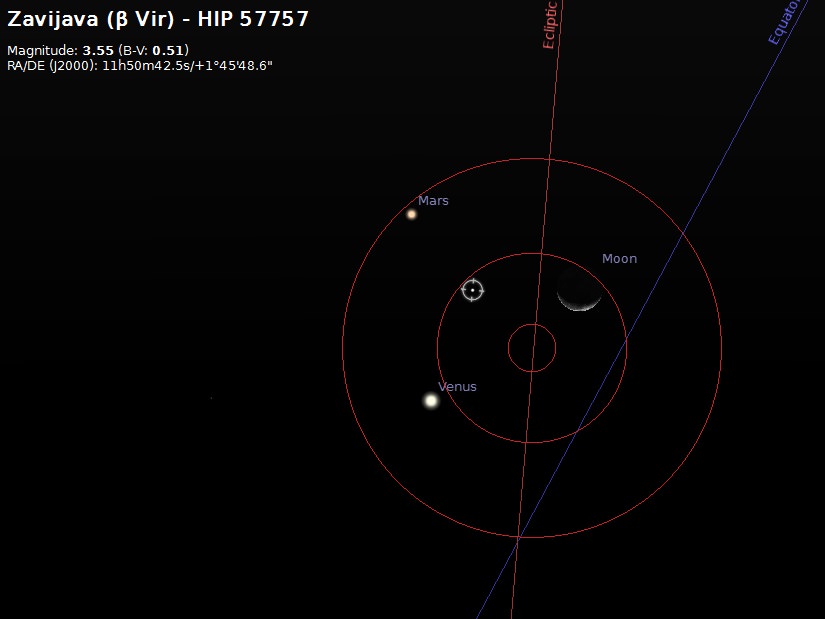
See a bright star near the Venus this week? It’s none other than +3.6 magnitude Beta Virginis (Zavijava). The star passes 15’ from Venus on the morning of November 6th. Stick around ‘til 2069, and you can actually witness Venus occult Beta Virginis. Between Beta Virginis and Mars, Venus has the appearance this week of having the large pseudo-moon it never possessed. From Venus, our Moon would appear near magnitude +0.4 with a disk 6.4” this week, and range 12’ from the Earth.
The closeup view on the morning of November 7th along with a 5 degree Telrad FoV. image credit: Stellarium
Now for the wow factor. All of these disparate objects merely lie along our Earthbound line of sight this week. Traveling at the speed of light (186,282 miles or 299,792 kilometers a second), the Moon lies just over a second away. Venus, Mars and Jupiter are next, at 6, 18, and 49 light minutes out, respectively… and Beta Virginis? It lies 36 light years distant.
This pass of the Moon also sets us up for an occultation of Mars and a dramatic daytime occultation of Venus for North America during the next lunation…
More to come!
-Got pictures of the planetary grouping this week with the Moon? Be sure to send ’em in to Universe Today and our Flickr forum.