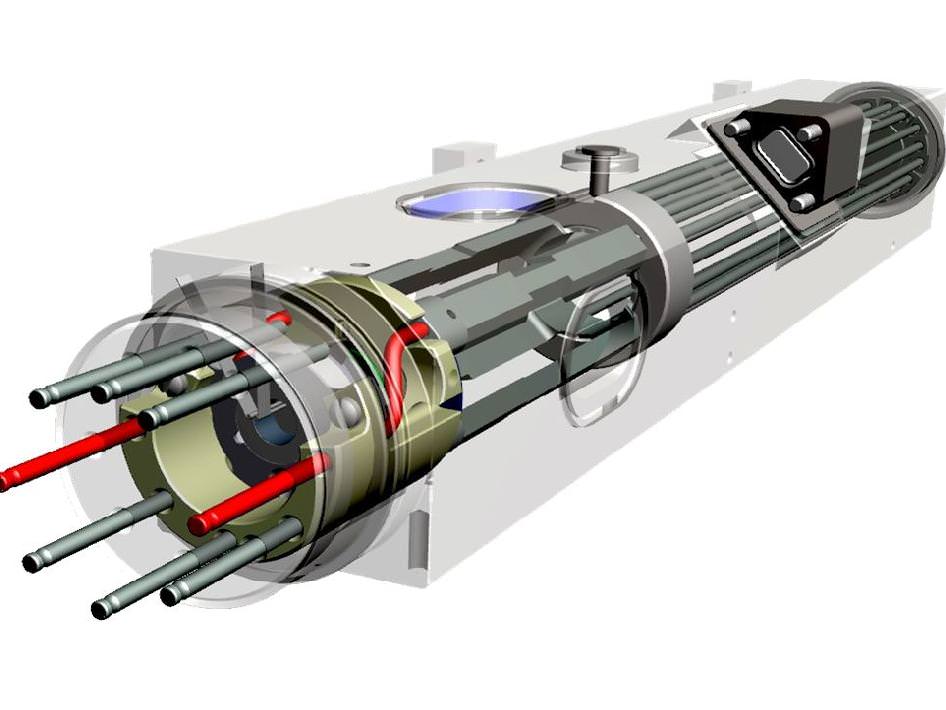
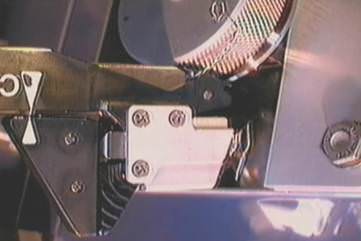
A computer-aided design, or CAD, drawing of the linear ion trap of the clock -- the "heart" of the Deep Space Atomic Clock's physics package -- is slightly smaller than two rolls of quarters laid side by side. The DSAC project is a small, low-mass atomic clock based on mercury-ion trap technology that will be demonstrated in space, providing unprecedented stability needed for next-generation deep space navigation and radio science. Image credit: NASA/JPL
[/caption]
Precise radio navigation — using radio frequencies to determine position — is vital to the success of all deep-space exploration missions. To improve navigation technology, a small demonstration mission called the Deep Space Atomic Clock (DSAC) will fly as part of a future NASA mission in order to validate a miniaturized, ultra-precise mercury-ion atomic clock that is 100 times more stable than today’s best navigation clocks.
The mission is now being readied for its preliminary design review in 2013, and is scheduled to fly as a hosted payload on an Iridium NEXT spacecraft. Launch is set for 2015.
NASA says the DSAC demonstration will revolutionize the way deep-space navigation is conducted by enabling a spacecraft to calculate its own timing and navigation data in real time. This one-way navigation technology would improve upon the current two-way system in which information is sent to Earth, requiring a ground team to calculate timing and navigation and then transmit it back to the spacecraft. A real-time, onboard navigation capability is key to improving NASA’s capabilities for executing time critical events, such as a planetary landing or planetary “flyby,” when signal delays are too great for the ground to interact with the spacecraft during the event.
“Adopting DSAC on future NASA missions will increase navigation and radio science data quantity by two to three times, improve data quality by up to 10 times and reduce mission costs by shifting toward a more flexible and extensible one-way radio navigation architecture,” said Todd Ely, principal investigator of the Deep Space Atomic Clock Technology Demonstration at NASA’s Jet Propulsion Laboratory in Pasadena, Calif. The project is part of NASA’s Technology Demonstration Missions program, managed by the Marshall Space Flight Center in Huntsville, Ala., for NASA’s Office of the Chief Technologist in Washington.
The one-way deep space navigation enabled by DSAC uses the existing Deep Space Network more efficiently than the current two-way system, thus expanding the network’s capacity without adding any new antennas or their associated costs. This is important, since future human exploration of deep space will demand more tracking from the deep space network than can currently be delivered with the existing system.
“The Deep Space Atomic Clock flight demonstration mission will advance this laboratory-qualified technology to flight readiness and will make a practical atomic clock available to a variety of space missions,” Ely said.
Ground-based atomic clocks have long been the cornerstone of most space vehicle navigation because they provide root data necessary for precise positioning. DSAC will deliver the same stability and accuracy for spacecraft exploring the solar system. In much the same way that modern Global Positioning Systems, or GPS, use one-way signals to enable terrestrial navigation services, the Deep Space Atomic Clock will provide a similar capability in deep-space navigation — with such extreme accuracy that researchers will be required to carefully account for the effects of relativity, or the relative motion of an observer and an observed object, as impacted by gravity, space and time. Clocks in GPS-based satellite, for example, must be corrected to account for this effect, or their navigational fixes begin to drift.
In the laboratory setting, the Deep Space Atomic Clock’s precision has been refined to permit drift of no more than one nanosecond in 10 days, due to the work of NASA engineers at JPL. Over the past 20 years, they have been steadily improving and miniaturizing the mercury-ion trap atomic clock, preparing it to operate in the harsh environment of deep space.
The updated clock is a miniature mercury-ion atomic device the DSAC team will fly as a payload on an Earth orbiter in a one-year experiment to validate its operability in space and its usefulness for one-way navigation.
“A potential use for DSAC on a future mission would be in a follow-up to the Mars Reconnaissance Orbiter,” Ely said. NASA’s Mars Reconnaissance Orbiter launched to Mars in 2005 on a mission that included a quest to learn more about the distribution and history of Mars’ water – frozen, liquid or vapor. The orbiter completed its primary science phase in 2008 and continues to work in an extended mission. Atomic clocks are the most accurate timekeeping method known and are used as the primary standard for international time distribution services — to control the frequency of television broadcasts, and in global navigation satellite systems such as the Global Positioning System.
After NASA was forced to back out the joint ExoMars mission with the European Space Agency due to budget constraints, ESA went looking for help with the planned multi-vehicle Mars mission. Now, reportedly the Head of Roscosmos Vladimir Popovkin met with Director General of the ESA, Jean-Jacques Dordain last week, and the two signed a memorandum of understanding to work together to make ExoMars a reality.
“The sides consider this project feasible and promising,” Popovkin’s spokeswoman Anna Vedishcheva was quoted in Ria Novosti. “The sides are to sign the deal by year-end.”
Russia’s participation in the project was also approved by the space council of the Russian Academy of Sciences.
The ExoMars program was slated to send an orbiter to Mars in 2016 and a rover in 2018, but after NASA pulled out of its part of the bargain — of providing several science instruments and an Atlas launch vehicle – ESA knew they could not do the entire mission on their own. Last fall, when it was becoming apparent that NASA’s ability to participate was in jeopardy, Dordain extended an invitation to Russia, and in turn Roscosmos officials hinted they might be interested in joining, offering to provide the use of their Proton rockets for the launches. The two space agencies then had preliminary talks at the Ariane 5 launch at Kourou, French Guiana in March, 2012.
Russian space agency chief Vladimir Popovkin said that Russia’s financing of ExoMars could be partially covered by insurance payments of 1.2 billion rubles (about $40.7 million) for the lost Phobos-Grunt sample return mission that would have gone to the Martian moon Phobos.
Artist concept of the ExoMars/Trace Gas Orbiter mission. Credit: NASA
The details of the new ExoMars partnership are yet to be worked out, but the ESA/NASA partnership would have sent the Trace Gas Orbiter to the Red Planet in 2016 to search for atmospheric methane — a potential signature for microbial life – as well as an advanced astrobiology rover to drill into the surface in 2018, with the hopes of determining if life ever evolved on Mars.
Unsurprisingly, the potential deal with Russia comes as a huge relief to European space scientists who have spent years working on ExoMars. Journalist Paul Sutherland quoted UK scientist John Zarnecki of the Open University, as saying, “It looks like the cavalry has come riding over the horizon to save us, but this time they are dressed in Russian uniforms. There will be a lot scientists in universities and research institutes throughout Europe who will be very relieved to hear this news. Otherwise it seemed that several years work preparing instruments for this mission was going to go down the drain.”
Well, not really…… The Sun didn’t do a barrel roll; it was actually the Solar Dynamics Observatory that performed a 360-degree roll about the spacecraft-Sun line. But this video showing the change in perspective of SDO makes it appear as though the Sun suddenly shifted (that’s a new one for 2012 doomsdayers to go crazy over!) This roll maneuver wasn’t just so SDO could have a bit of fun, joyriding out there in its inclined geosynchronous orbit. The roll allows the scientists to remove the instrument optical distortions from the solar images taken by the Helioseismic and Magnetic Imager (HMI) to precisely determine the solar limb. Continue reading “The Sun Does a Barrel Roll”
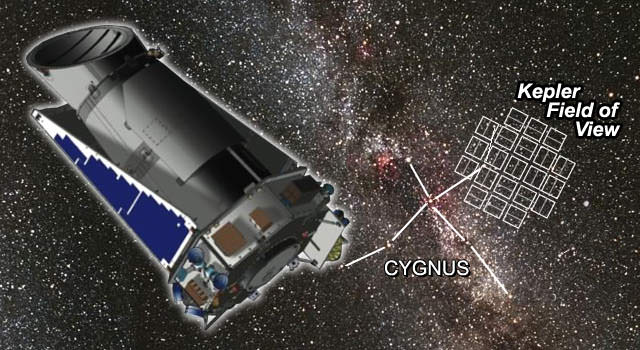
Artist concept of Kepler in space. Credit: NASA/JPL
[/caption]
With NASA’s tight budget, there were concerns that some of the agency’s most successful astrophysics missions might not be able to continue. Anxieties were rampant about one mission in particular, the very fruitful exoplanet-hunting Kepler mission, as several years of observations are required in order for Kepler to confirm a repeated orbit as a planet transits its star. But today, after a long awaited Senior Review of nine astrophysics missions, surprisingly all have received funding to continue at least through 2014, with several mission extensions, including Kepler.
“Ad Astra… Kepler mission extended through FY16! We are grateful & ecstatic!” the @NASAKepler Twitter account posted today.
Additionally, missions such as Hubble, Fermi and Swift will receive continued funding. The only mission that took a hit was the Spitzer infrared telescope, which – as of now — will be closed out in 2015, which is sooner than requested.
The Senior Review of missions takes place every two years, with the goal assisting NASA to optimize the scientific productivity of its operating missions during their extended phase. In the Review, missions are ranked as which are most successful; previous Senior Reviews led to the removal of funding for the weakest 10-20% of extended missions, some of which had partial instrument failures or significantly reduced capabilities.
But this year’s review found all the astrophysics mission to be successful.
“These nine missions comprise an extremely strong ensemble to enter the Senior Review process and we find that all are making very significant scientific contributions,” the Review committee wrote in their report.
Here’s a rundown of the missions and how their funding was affected by the Senior Review:
• The Hubble Space Telescope will continue at the currently funded levels.
• Chandra will also continue at current levels, but its Guest Observer budget will actually be increased to account for decreases in Fiscal Year 2011.
• Fermi operations are extended through FY16, with a 10 percent per year reduction starting in FY14.
• Swift and Kepler mission operations are extended through FY16, including funding for data analysis.
• Planck will support one year extended operations of the Low Frequency Instrument (LFI).
• Spitzer’s operations are extended through FY14 with closeout in FY15.
• U.S. science support of Suzaku is extended to March 2015.
• Funding for U.S. support of XMM-Newton is extended through March 2015.
NASA says that all FY15-FY16 decisions are for planning purposes and they will be revisited in the 2014 Senior Review.
Low Density Supersonic Decelerator prototype. Credit: NASA
Landing large payloads on Mars — large enough to bring humans to the Red Planet’s surface — is still beyond our capability. “There’s too much atmosphere on Mars to land heavy vehicles like we do on the moon, using propulsive technology completely,” said Rob Manning, Chief Engineer for the Mars Exploration Directorate, in an article we wrote a few years ago about the problems of landing on Mars “and there’s too little atmosphere to land like we do on Earth. Mars atmosphere provides an ugly, grey zone.”
The best hope on the horizon for making the human missions to Mars possible are supersonic decelerators that are now being developed. This new technology will hopefully be able to slow larger, heavier landers from the supersonic speeds of atmospheric entry to subsonic ground-approach speeds. NASA’s Low Density Supersonic Decelerator (LDSD) program is testing out some of these new devices and recently performed a trial run on a rocket sled test to replicate the forces a supersonic spacecraft would experience prior to landing. The sled tests will see how inflatable and parachute decelerators work to slow spacecraft prior to landing and allow NASA to increase landed payload masses, as well as improve landing accuracy and increase the altitude of safe landing-sites.
[/caption]
Three devices are being developed: two different sizes of supersonic inflatable aerodynamic decelerators and super-huge parachutes. The supersonic inflatable decelerators are very large, durable, balloon-like pressure vessels that inflate around the entry vehicle and slow it from Mach 3.5 or greater to Mach 2. These decelerators are being developed in 6-meter-diameter and 9-meter-diameters.
The large parachute is 30 meters in diameter, and it will further slow the entry vehicle from Mach 2 to subsonic speeds. All three devices will be the largest of their kind ever flown at speeds several times greater than the speed of sound.
Together, these new drag devices can increase payload delivery to the surface of Mars from our current capability of 1.5 metric tons to 2 to 3 metric tons, depending on which inflatable decelerator is used in combination with the parachute. They will increase available landing altitudes by 2-3 kilometers, increasing the accessible surface area we can explore. They also will improve landing accuracy from a margin of 10 kilometers to just 3 kilometers. All these factors will increase the capabilities and robustness of robotic and human explorers on Mars.
NASA is now testing these devices on rocket sleds and later will conduct tests high in Earth’s stratosphere, simulating entry into Mars’ thin atmosphere. The first supersonic flight tests are set for 2013 and 2014.
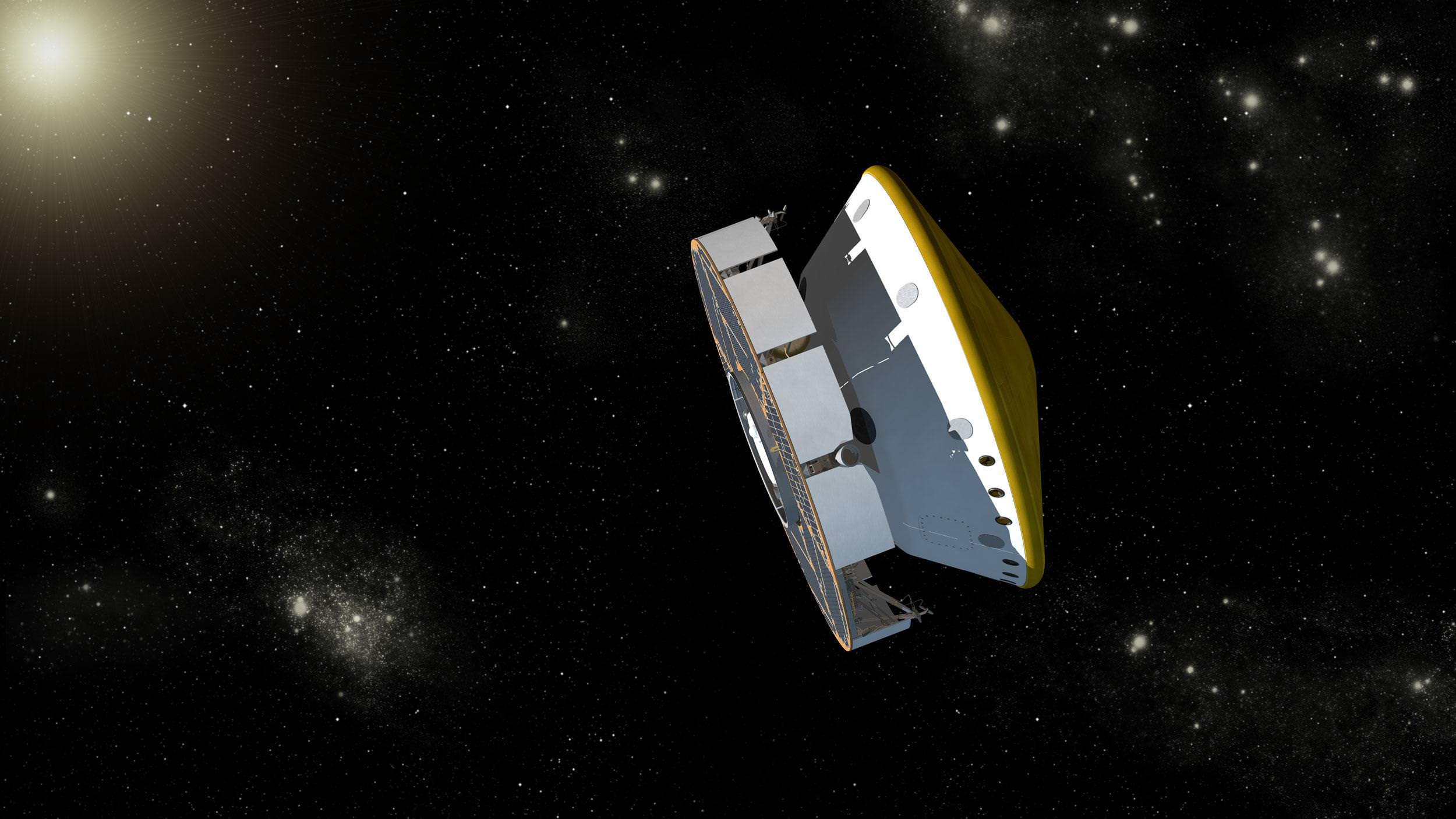
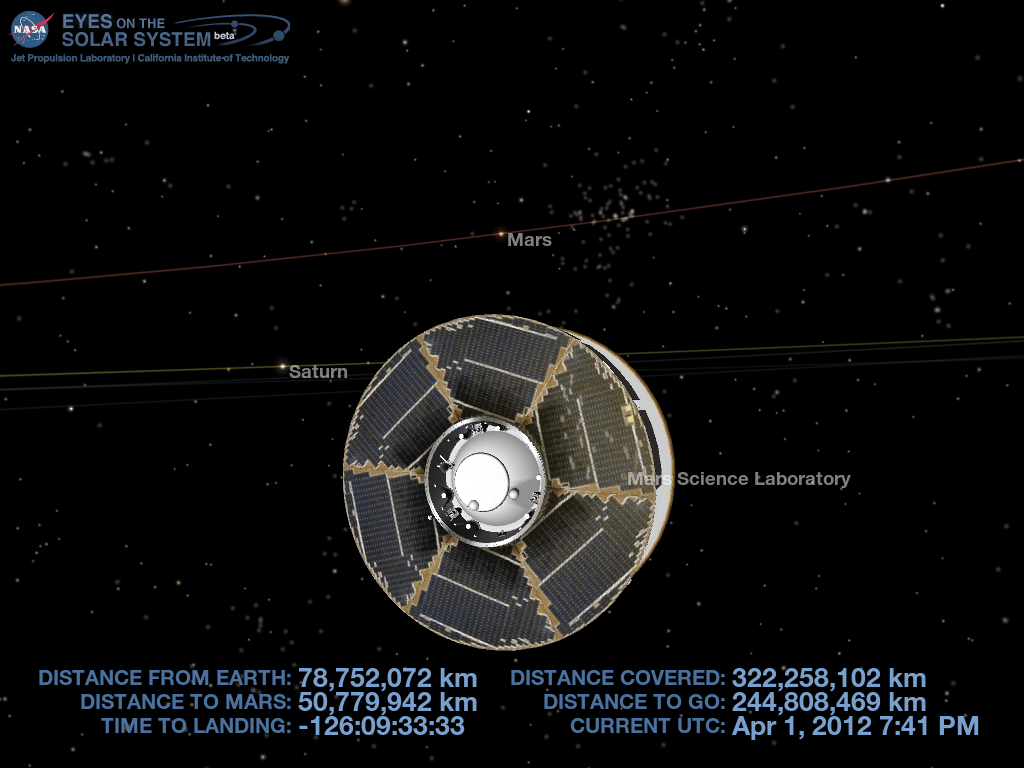
Curiosity Mars Science Laboratory (MSL) Spacecraft Cruising to Mars. Guided by the stars, Curiosity has reached the halfway point of its interplanetary cruise phase from the Earth to Mars in between launch on Nov. 26, 2011 and final approach in August 2012. MSL will use the stars to navigate. The spacecraft includes a disc-shaped solar powered cruise stage (on the left) attached to the aeroshell (right). Curiosity and the descent stage are tucked inside the aeroshell. Along the way to Mars, the cruise stage will perform six trajectory correction maneuvers (TCM’s) to adjust the spacecraft's path toward its final, precise landing site on Mars. Credit: NASA/JPL-Caltech
[/caption]
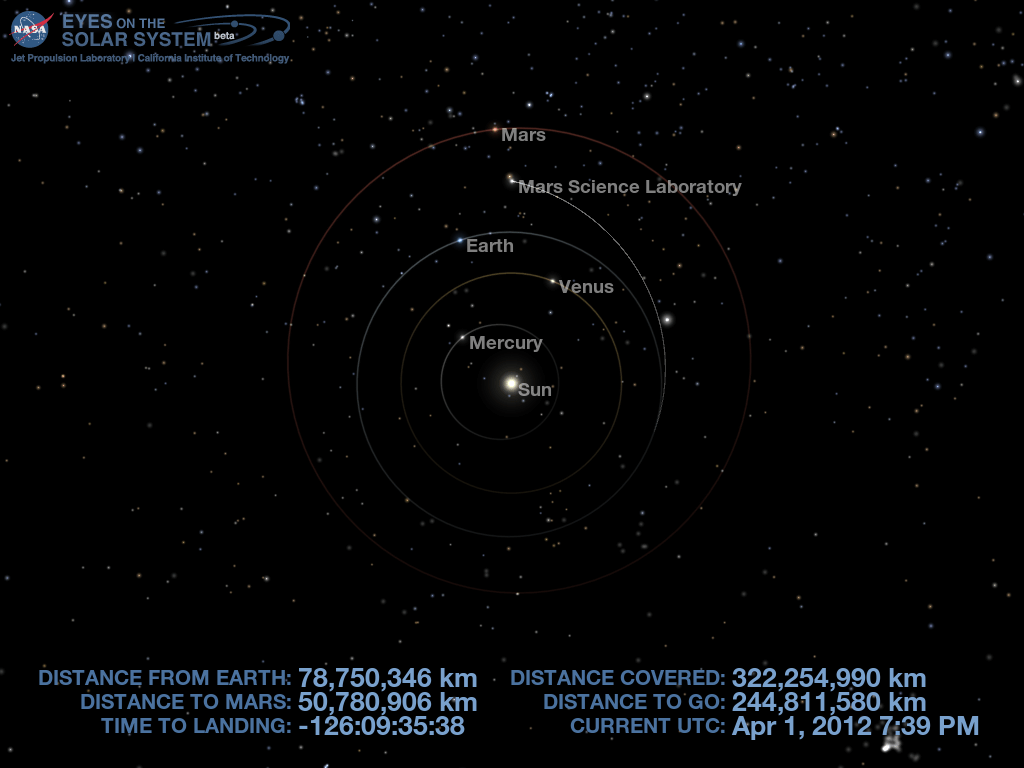
As of today, NASA’s car sized Curiosity rover has reached the halfway point in her 352 million mile (567 million km) journey to Mars – No fooling on April 1, 2012.
It’s T Minus 126 days until Curiosity smashes into the Martian atmosphere to brave the hellish “6 Minutes of Terror” – and, if all goes well, touch down inside Gale Crater at the foothills of a Martian mountain taller than the tallest in the continental United States – namely Mount Rainier.
Curiosity will search for the ingredients of life in the form of organic molecules – the carbon based molecules which are the building blocks of life as we know it. The one-ton behemoth is packed to the gills with 10 state of the art science instruments including a 7 foot long robotic arm, scoop, drill and laser rock zapper.
The Curiosity Mars Science laboratory (MSL) rover was launched from sunny Florida on Nov. 26, 2011 atop a powerful Atlas V rocket for an 8.5 month interplanetary cruise from the Earth to Mars and is on course to land on the Red Planet early in the morning of Aug. 6, 2012 EDT and Universal Time (or Aug. 5 PDT).
Curiosity’s Position in Space on April 1, 2012 - Halfway to Mars
This roadmap shows Curiosity's flight path through the Solar System - From Earth to Mars during the 8.5 month interplanetary cruise. Credit: NASA/JPL-Caltech
On March 26, engineers at NASA’s Jet Propulsion Laboratory, Pasadena, Calif., successfully ignited the spacecrafts thrusters for the second of six planned trajectory correction maneuvers (TCM’s) to adjust the robot’s flight path during the long journey to achieve a pinpoint landing beside the Martian mountain.
“It is satisfying to get the second maneuver under our belts and know we are headed in the right direction,” said JPL’s Erisa Hines, systems lead for the maneuver. “The cruise system continues to perform very well.”
This maneuver was one-seventh as much as the flight’s first course adjustment, on Jan. 11. The cruise stage is equipped with eight thrusters grouped into two sets of four that fire as the entire spacecraft spins at two rotations per minute. The thruster firings change the velocity of the spacecraft in two ways – along the direction of the axis of rotation and also perpendicular to the axis. Altogether there were more than 60 pulsing maneuvers spaced about 10 seconds apart.
“The purpose is to put us on a trajectory to the point in the Mars atmosphere where we need to be for a safe and accurate landing,” said Mau Wong, maneuver analyst at JPL.
Atlas V rocket and Curiosity Mars rover poised at Space Launch Complex 41 at Cape Canaveral, Florida prior to Nov. 26, 2011 liftoff. Credit: Ken Kremer
Marking another crucial milestone, the flight team has also powered up and checked the status of all 10 MSL science instruments – and all are nominal.
“The types of testing varied by instrument, and the series as whole takes us past the important milestone of confirming that all the instruments survived launch,” said Betina Pavri of NASA’s Jet Propulsion Laboratory, Pasadena, Calif., science payload test engineer for the mission. “These checkouts provide a valuable calibration and characterization opportunity for the instruments, including camera dark images and a measurement of zero pressure in the vacuum of space for the rover weather station’s pressure sensor.”
Ever since it was the first of MSL’s science instruments to be switched on three months ago, the Radiation Assessment Detector (RAD) has been collecting valuable measurements about the potentially lethal radiation environment in space and acting as a stunt double for determining the potential health effects on future human travelers to Mars.
RAD has been collecting data on the recent wave of extremely powerful solar flares erupting from the sun.
Curiosity has another 244 million kilometers to go over the next 4 months.
All hopes ride on Curiosity as America’s third and last generation of Mars rovers.
Devastating and nonsensical funding cuts to NASA’s Planetary Science budget have forced NASA to cancel participation in the 2018 ExoMars lander mission that had been joint planned with ESA, the European Space Agency. ESA now plans to forge ahead with Russian participation.
Stay tuned
Simulated view to Mars over the shoulder of Curiosity on 1 April 2012 - from current location halfway to the Red Planet. Credit: NASA/JPL-Caltech
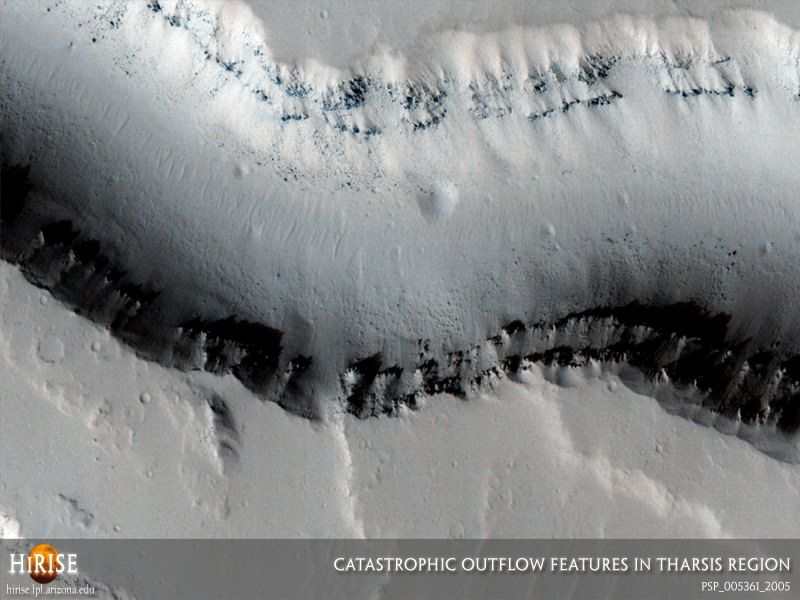
Outflow channel in the Tharsis region on Mars. Credit: NASA/JPL/University of Arizona
Large features on Mars called outflow channels have been a point of contention among planetary scientists. “Most Mars scientists accept that outflow channels were carved by water, but alternate hypotheses persist, especially that lava carved the outflow channels,” said Alfred McEwen Principal Investigator of the HiRISE camera on the Mars Reconnaissance Orbiter. McEwen said that water is still the preferred mechanism and he doubts that all the channels could have been created by lava flows.
But in what could be seen as a type of compromise, he offered a new theory for the outflow channels, based on observations by HiRISE: the channels were originally carved by huge water flows on ancient Mars and later were partially filled in by lava.
“This sequence of events provides a better explanation,” McEwen said.
Large outflow channels can be 10 km or more in width and may be hundreds of kilometers long. From orbital images, they appear to be huge, dry river beds, carved by very large volumes of running water.
While these features are too large to have been caused by flooding from rainfall, other explanations have been offered. One model involves large amounts of water frozen as permafrost in the soil and when a major source of local heating occurred, such as volcanic activity, there was melting and catastrophic flooding.
However, other explanations don’t involve water at all, but suggest flowing lava created these channels.
Speaking at the 2012 Lunar and Planetary Science Conference last week, McEwen mentioned specifically one proponent of the lava hypothesis, David Leverington from Texas Tech University, who proposed last year that slippery, low-viscosity lavas created the channels. Leverington says the lava hypothesis offers a simpler explanation that fits well within a wider geological framework of Mars and compares well with similar channel-like features on the Moon and Venus.
“He makes some good points,” McEwen said, “and argues for a form of Occam’s Razor. But we have been searching extensively with HiRISE and finding things that satisfy Leverington’s challenges.”
McEwen said the abundant evidence of water carving the channels is too hard to dismiss. Several examples of outflow channels show deposits from water-based flooding that lava flow can’t explain; additionally, there is ample evidence of bedrock erosion by water on Mars.
McEwen also said crater dating areas of several outflow channels show that the channels themselves are older than the lava flow.
Part of Athabasca Valles, draped in lava. Credit: NASA/JPL/University of Arizona
“In the Athabasca Valles channels, MRO data showed that lava completely filled the channels and even overflow in places,” he said. “The lava can actually make channels look young.”
Uzboi Valles offers the best counterexample to Leverington’s hypothesis, McEwen said. “No lava fills in this highlands channel, and the channel preserves local layered alluvial deposits and shorelines. So that means we cannot explain all outflows channels from lava erosion.”
McEwen and his team suggest that large floods may have occurred in the Hesperian to early Amazonian, ending about 1 to 1.5 billion years ago, carving the channels. Then, later came the lava flows that formed Mars’ broad plains and sand dunes that we now see – which also filled in some of the outflow channels.
Bedrock Exposures in Uzboi Vallis. Credit: NASA/JPL/University of Arizona
But McEwen said the debate about these channels is good science. “Did water create these channels? That is a good question,” he said. “We shouldn’t just assume the answer is yes. But we propose water must have carved at least some of the channels, and that water outflow is the main mechanism. If you disagree with anything I’ve said, go to the HiRISE website’s “HiWish” page to suggest areas for further imaging of these features. I’ve been disappointed how few members of the science community have used this tool,” he said.
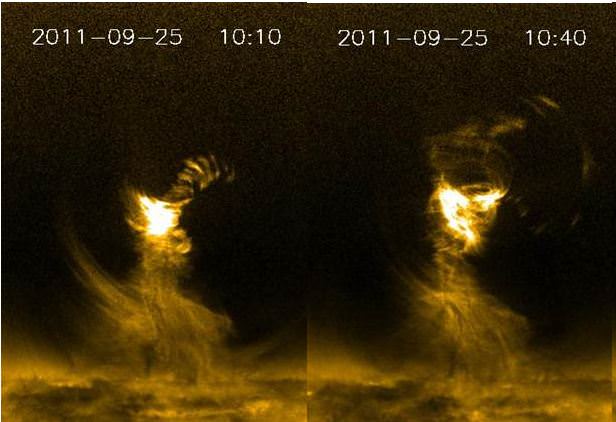
Spectacular rotation of material from solar prominences and the coronal cavities on September 25, 2011. Credit: NASA/Dr. Xing Li, Dr. Huw Morgan and Mr. Drew Leonard.
[/caption]
The Solar Dynamics Observatory captured images and video of a spectacular rotation of material from the Sun in a solar prominence. The whirling, dancing prominence created a massive tornado-like feature on the Sun, five times bigger than the Earth. “This is perhaps the first time that such a huge solar tornado is filmed by an imager,” said Dr. Xing Li of Aberystwyth University, presenting his team’s work at the National Astronomy Meeting this week in the UK. “The superb spatial and temporal resolution of SDO allows us to observe the solar atmosphere in great detail.”
The solar tornado was discovered using the Atmospheric Imaging Assembly (AIA) telescope on board SDO. On September 25, 2011, the AIA saw superheated gases as hot as 50,000 – 2,000,000 Kelvin sucked from the origin of a solar prominence, and spiral up into the high atmosphere. It traveled about 200,000 kilometers (124,000 miles) along the Sun for a period of at least three hours.
The hot gases in the tornadoes have speeds as high as 300,000 km per hour (186,000 mph) as opposed to terrestrial tornadoes, which can reach 150 km/h (90 mph).
Li and his team said that these tornadoes often occur at the root of huge coronal mass ejections. The solar tornadoes drag winding magnetic field and electric currents into the high atmosphere. It is possible that the magnetic field and currents play a key role in driving the coronal mass ejections.
A smaller solar tornado was captured in February of 2012:
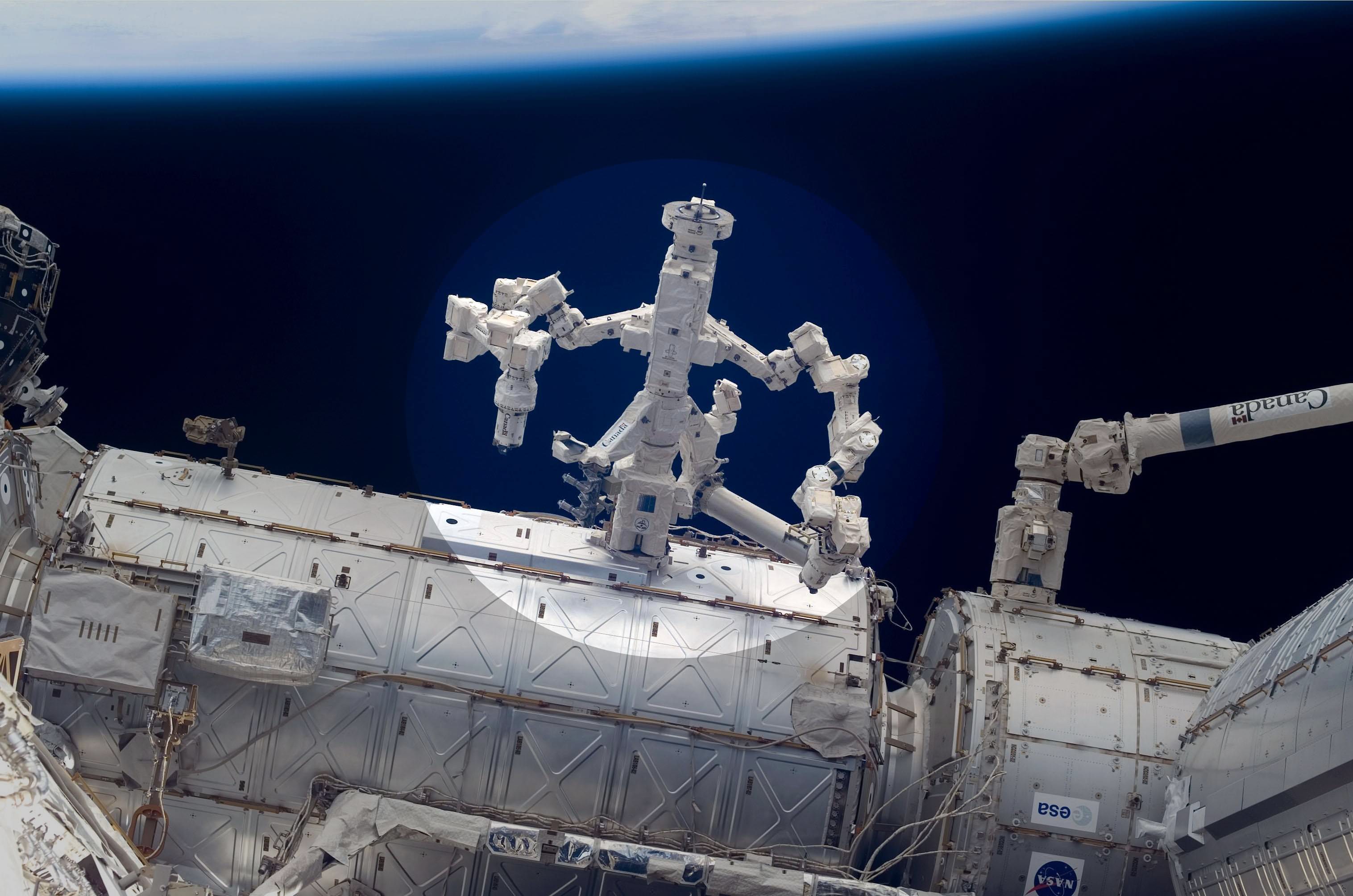
Canada’s Dextre robot (highlight) and NASA’s Robotic Refueling Experiment jointly performed groundbreaking robotics research aboard the ISS in March 2012. Dextre used its hands to grasp specialized work tools on the RRM for experiments to repair and refuel orbiting satellites. Credit: NASA
[/caption]
A combined team of American and Canadian engineers has taken a major first step forward by successfully applying new, first-of-its-kind robotics research conducted aboard the International Space Station (ISS) to the eventual repair and refueling of high value orbiting space satellites, and which has the potential to one day bring about billions of dollars in cost savings for the government and commercial space sectors.
Gleeful researchers from both nations shouted “Yeah !!!” – after successfully using the Robotic Refueling Mission (RRM) experiment – bolted outside the ISS- as a technology test bed to demonstrate that a remotely controlled robot in the vacuum of space could accomplish delicate work tasks requiring extremely precise motion control. The revolutionary robotics experiment could extend the usable operating life of satellites already in Earth orbit that were never even intended to be worked upon.
“After dedicating many months of professional and personal time to RRM, it was a great emotional rush and a reassurance for me to see the first video stream from an RRM tool,” said Justin Cassidy in an exclusive in-depth interview with Universe Today. Cassidy is RRM Hardware Manager at the NASA Goddard Spaceflight Center in Greenbelt, Maryland.
Astronuats Install Robotic Refueling Mission (RRM) experiment during Shuttle Era's Final Spacewalk
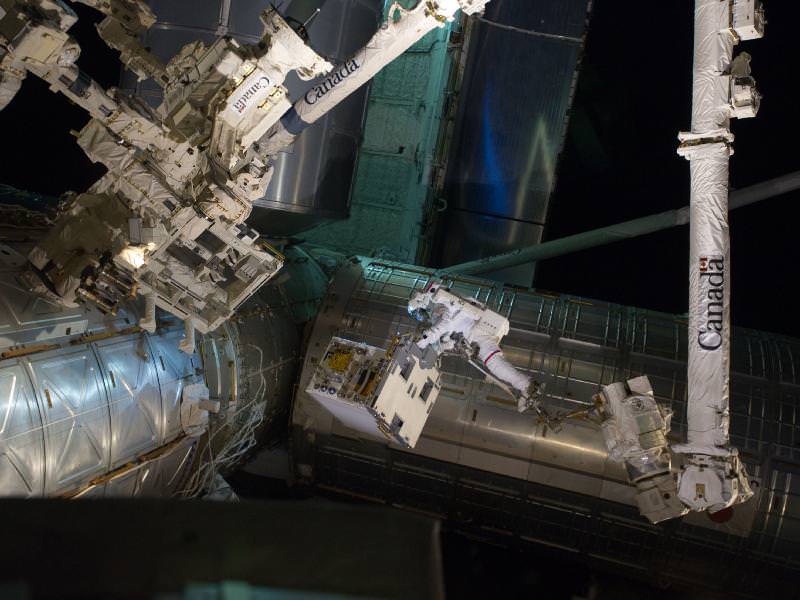
In March 2012, RRM and Canada’s Dextre Robot jointly acccomplised fundamental leap forward in robotics research aboard the ISS. Spacewalker Mike Fossum rides on the International Space Station's robotic arm as he carries the Robotic Refueling Mission experiment. This was the final scheduled spacewalk during a shuttle mission. Credit: NASA
And the RRM team already has plans to carry out even more ambitious follow on experiments starting as soon as this summer, including the highly anticipated transfer of fluids to simulate an actual satellite refueling that could transfigure robotics applications in space – see details below !
All of the robotic operations at the station were remotely controlled by flight controllers from the ground. The purpose of remote control and robotics is to free up the ISS human crew so they can work on other important activities and conduct science experiments requiring on-site human thought and intervention.
Dextre "hangs out" in space with two Robotic Refueling Mission (RRM) tools in its "hands." The RRM module is in the foreground. Credit: NASA
Over a three day period from March 7 to 9, engineers performed joint operations between NASA’s Robotic Refueling Mission (RRM) experiment and the Canadian Space Agency’s (CSA) robotic “handyman” – the Dextre robot. Dextre is officially dubbed the SPDM or Special Purpose Dexterous Manipulator.
On the first day, robotic operators on Earth remotely maneuvered the 12-foot (3.7 meter) long Dextre “handyman” to the RRM experiment using the space station’s Canadian built robotic arm (SSRMS).
Dextre’s “hand” – technically known as the “OTCM” – then grasped and inspected three different specialized satellite work tools housed inside the RRM unit . Comprehensive mechanical and electrical evaluations of the Safety Cap Tool, the Wire Cutter and Blanket Manipulation Tool, and the Multifunction Tool found that all three tools were functioning perfectly.
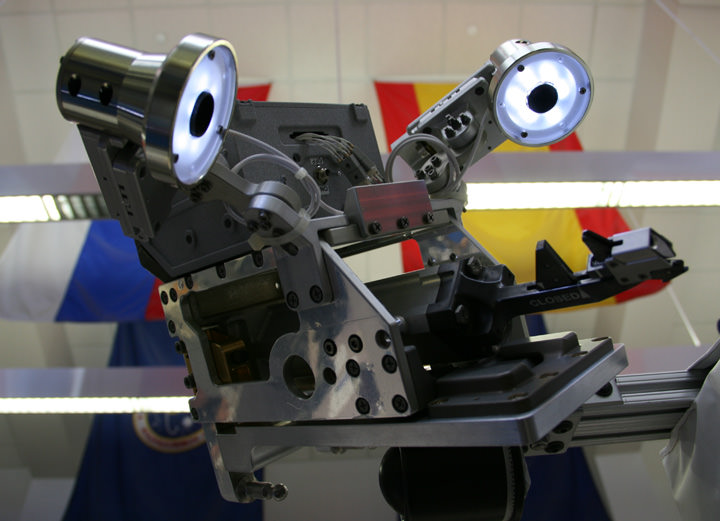
RRM Wire Cutter Tool (WCT) experiment is equipped with integral camera and LED lights -
on display at Kennedy Space Center Press Site. Dextre robot grasped the WCT with its hands and successfully snipped 2 ultra thin wires during the March 2012 RRM experiments. Credit: Ken Kremer
“Our teams mechanically latched the Canadian “Dextre” robot’s “hand” onto the RRM Safety Cap Tool (SCT). The RRM SCT is the first on orbit unit to use the video capability of the Dextre OTCM hand,” Cassidy explained.
“At the beginning of tool operations, mission controllers mechanically drove the OTCM’s electrical umbilical forward to mate it with the SCT’s integral electronics box. When the power was applied to that interface, our team was able to see that on Goddard’s large screen TVs – the SCT’s “first light” video showed a shot of the tool within the RRM stowage bay (see photo).
Shot of the Safety Cap Tool (SCT) tool within the RRM stowage bay. Credit NASA RRM
“Our team burst into a shout out of “Yeah!” to commend this successful electrical functional system checkout.”
Dextre then carried out assorted tasks aimed at testing how well a variety of representative gas fittings, valves, wires and seals located on the outside of the RRM module could be manipulated. It released safety launch locks and meticulously cut two extremely thin satellite lock wires – made of steel – and measuring just 20 thousandths of an inch (0.5 millimeter) in diameter.
“The wire cutting event was just minutes in duration. But both wire cutting tasks took approximately 6 hours of coordinated, safe robotic operations. The lock wire had been routed, twisted and tied on the ground at the interface of the Ambient Cap and T-Valve before flight,” said Cassidy.
This RRM exercise represents the first time that the Dextre robot was utilized for a technology research and development project on the ISS, a major expansion of its capabilities beyond those of robotic maintenance of the massive orbiting outpost.
Video Caption: Dextre’s Robotic Refueling Mission: Day 2. The second day of Dextre’s most demanding mission wrapped up successfully on March 8, 2012 as the robotic handyman completed his three assigned tasks. Credit: NASA/CSA
Wire Cutter Tool (WCT) Camera View of Ambient Cap Wire Cutting. Courtesy: Justin Cassidy to Universe Today. Credit NASA RRM
Altogether the three days of operations took about 43 hours, and proceeded somewhat faster than expected because they were as close to nominal as could be expected.
“Days 1 and 2 ran about 18 hours,” said Charles Bacon, the RRM Operations Lead/Systems Engineer at NASA Goddard, to Universe Today. “Day 3 ran approximately 7 hours since we finished all tasks early. All three days baselined 18 hours, with the team working in two shifts. So the time was as expected, and actually a little better since we finished early on the last day.”
Wire Cutter Tool (WCT) Camera View of T-Valve Wire Cutting. Courtesy: Justin Cassidy to Universe Today. Credit NASA RRM
“For the last several months, our team has been setting the stage for RRM on-orbit demonstrations,” Cassidy told me. “Just like a theater production, we have many engineers behind the scenes who have provided development support and continue to be a part of the on-orbit RRM operations.”
“At each stage of RRM—from preparation, delivery, installation and now the operations—I am taken aback by the immense efforts that many diverse teams have contributed to make RRM happen. The Satellite Servicing Capabilities Office at NASA’s Goddard Space Flight Center teamed with Johnson Space Center, Kennedy Space Center (KSC), Marshall Space Flight Center and the Canadian Space Agency control center in St. Hubert, Quebec to make RRM a reality.”
“The success of RRM operations to date on the International Space Station (ISS) using Dextre is a testament to the excellence of NASA’s many organizations and partners,” Cassidy explained.
The three day “Gas Fittings Removal task” was an initial simulation to practice techniques essential for robotically fixing malfunctioning satellites and refueling otherwise nominally operating satellites to extend to hopefully extend their performance lifetimes for several years.
Ground-based technicians use the fittings and valves to load all the essential fluids, gases and fuels into a satellites storage tanks prior to launch and which are then sealed, covered and normally never accessed again.
“The impact of the space station as a useful technology test bed cannot be overstated,” says Frank Cepollina, associate director of the Satellite Servicing Capabilities Office (SSCO) at NASA’s Goddard Space Flight Center in Greenbelt, Md.
“Fresh satellite-servicing technologies will be demonstrated in a real space environment within months instead of years. This is huge. It represents real progress in space technology advancement.”
Four more upcoming RRM experiments tentatively set for this year will demonstrate the ability of a remote-controlled robot to remove barriers and refuel empty satellite gas tanks in space thereby saving expensive hardware from prematurely joining the orbital junkyard.
The timing of future RRM operations can be challenging and depends on the availability of Dextre and the SSRMS arm which are also heavily booked for many other ongoing ISS operations such as spacewalks, maintenance activities and science experiments as well as berthing and/or unloading a steady stream of critical cargo resupply ships such as the Progress, ATV, HTV, Dragon and Cygnus.
Flexibility is key to all ISS operations. And although the station crew is not involved with RRM, their activities might be.
“While the crew itself does not rely on Dextre for their operations, Dextre ops can indirectly affect what the crew can or can’t do,” Bacon told me. “For example, during our RRM operations the crew cannot perform certain physical exercise activities because of how that motion could affect Dextre’s movement.”
Here is a list of forthcoming RRM operations – pending ISS schedule constraints:
Refueling (summer 2012) – After Dextre opens up a fuel valve that is similar to those commonly used on satellites today, it will transfer liquid ethanol into it through a sophisticated robotic fueling hose.
Thermal Blanket Manipulation (TBD 2012)- Dextre will practice slicing off thermal blanket tape and folding back a thermal blanket to reveal the contents underneath.
Electrical Cap Removal (TBD 2012)- Dextre will remove the caps that would typically cover a satellite’s electrical receptacle.
http://youtu.be/LboVN38ZdgU
RRM was carried to orbit inside the cargo bay of Space Shuttle Atlantis during July 2011 on the final shuttle mission (STS-135) of NASA’s three decade long shuttle program and then mounted on an external work platform on the ISS backbone truss by spacewalking astronauts. The project is a joint effort between NASA and CSA.
“This is what success is all about. With RRM, we are truly paving the way for future robotic exploration and satellite servicing,” Cassidy concluded. Full size Mock up of RRM box and experiment tool at KSC Press Site
Equipment Tool movements and manipulations by Dextre robot are simulated by NASA Goddard RRM manager Justin Cassidy. Credit: Ken Kremer
…….
March 24 (Sat): Free Lecture by Ken Kremer at the New Jersey Astronomical Association, Voorhees State Park, NJ at 830 PM. Topic: Atlantis, the End of Americas Shuttle Program, RRM, Orion, SpaceX, CST-100 and the Future of NASA Human & Robotic Spaceflight
As we reported earlier this month, The HiRISE camera captured a tornado in action on Mars, and this dramatic new video put together by the Jet Propulsion Laboratory provides new insights showing we’re definitely not in Kansas anymore!