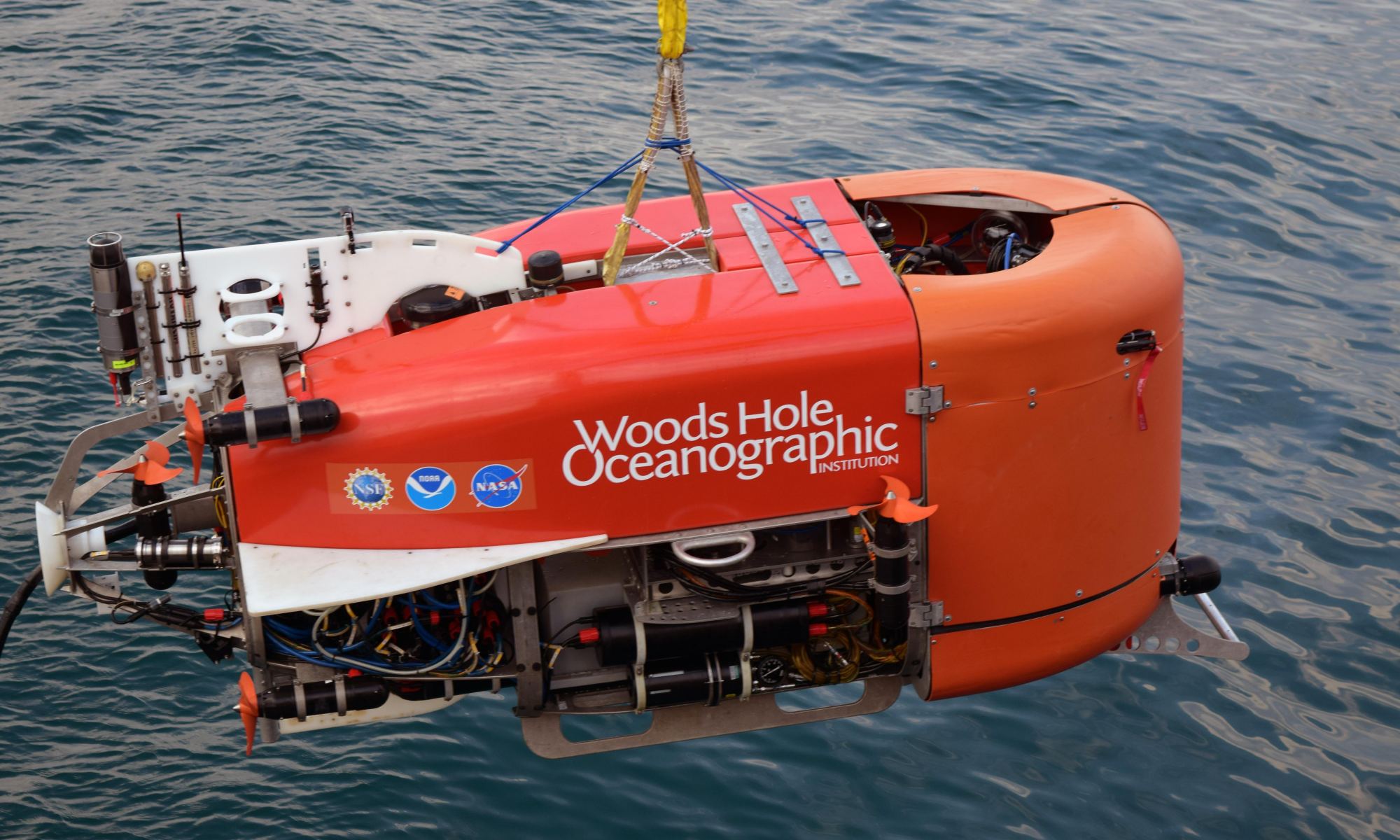
The Woods Hole Oceanographic Institution (WHOI) says their underwater robot has just completed the first-ever automated underwater sampling operation. The robot is called Nereid Under Ice (NEI) and it collected the sample in Greece. WHOI is developing Nereid in association with NASA’s Planetary Science and Technology from Analog Research (PSTAR) program.
Continue reading “Underwater Robot Captures its First Sample 500 Meters Below the Surface of the Ocean”Underwater Robot Captures its First Sample 500 Meters Below the Surface of the Ocean