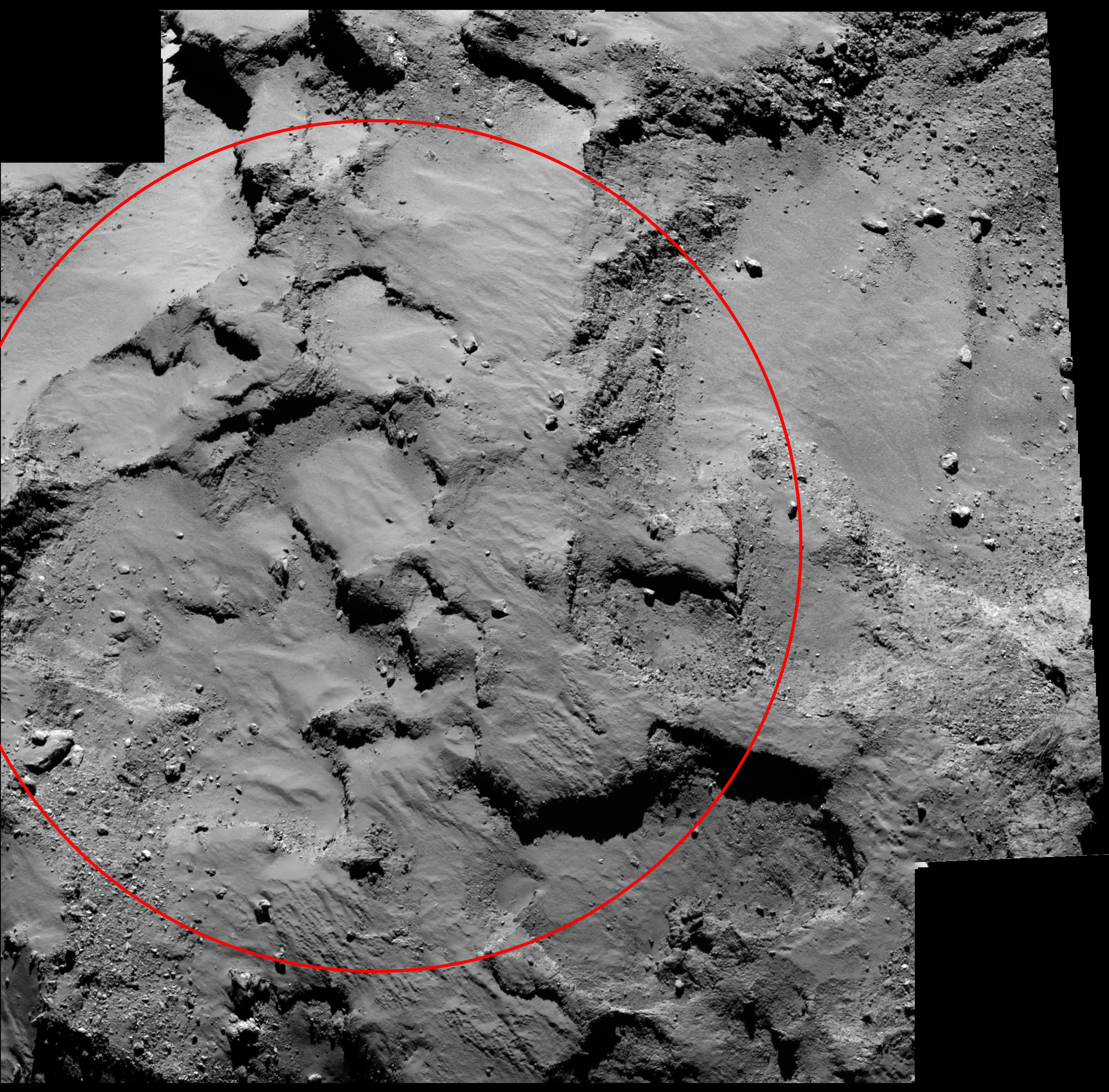
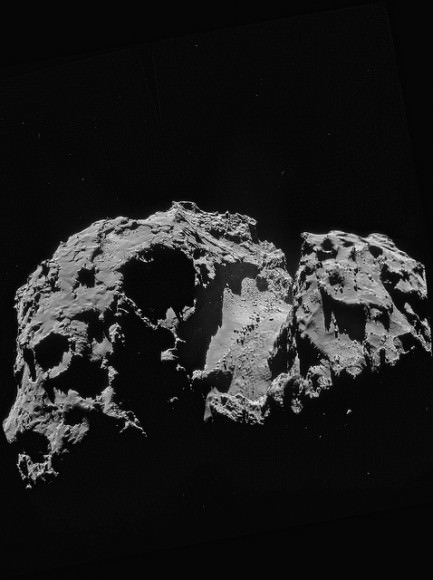
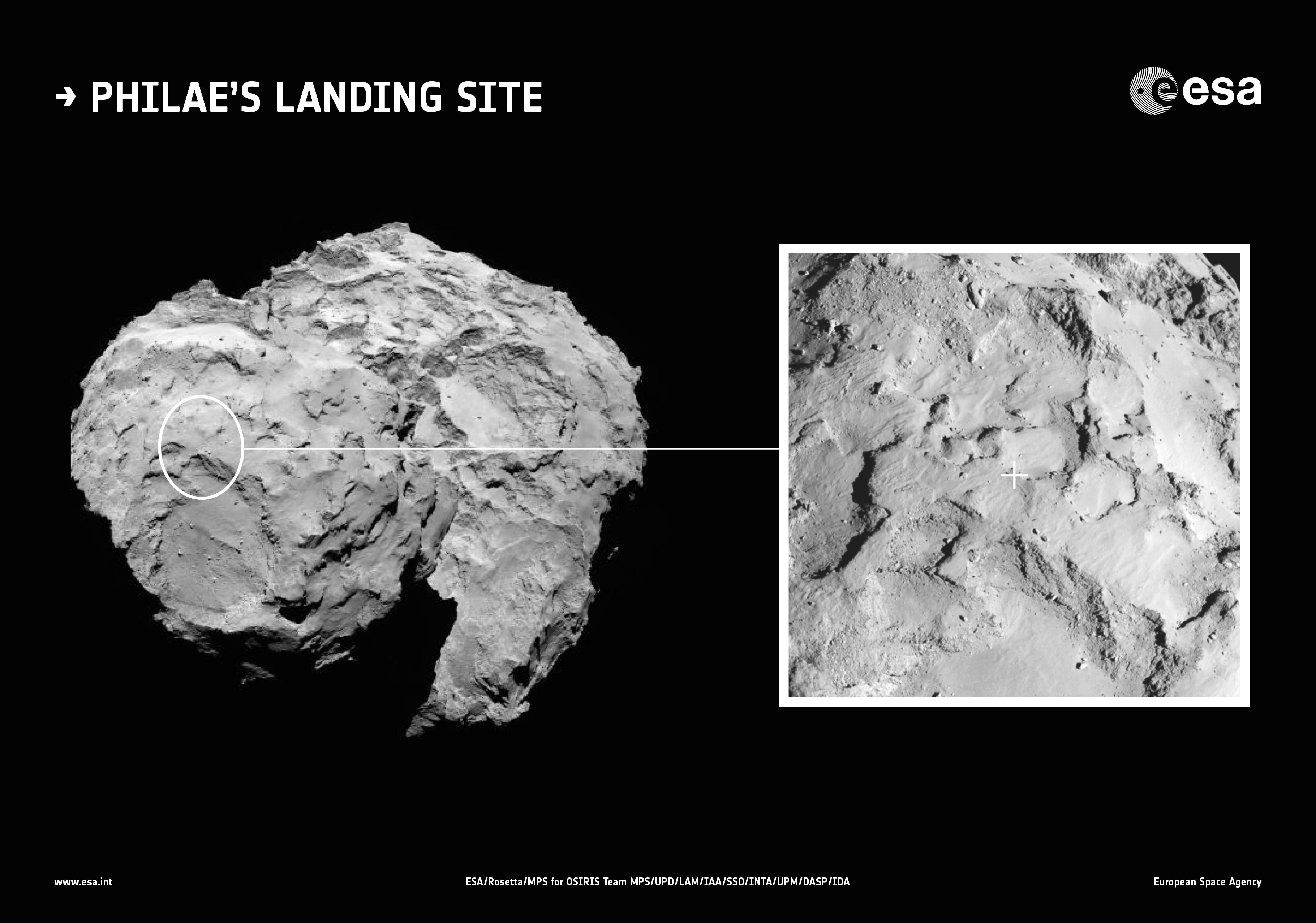
Mosaic of OSIRIS images of landing site "J" on Comet 67P/CG. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
The long-awaited deployment of the Philae lander, currently “piggybacked” aboard ESA’s Rosetta spacecraft orbiting the nucleus of Comet 67P/Churyumov-Gerasimenko, will occur in less than a month and we now have our best look yet at the area now green-lighted for touchdown. The picture above, made from two images acquired by Rosetta’s OSIRIS imaging instrument, shows a 500-meter circle centered on “Site J,” a spot on the comet’s “head” carefully chosen by mission scientists as the best place in which Philae should land, explore, and ultimately travel around the Sun for the rest of its days. And as of today, it’s a GO!
Site J was selected from among five other possible sites and was chosen because of the relative safety of its surface, its accessibility to consistent solar illumination, and the scientific and observational data it can make available to Philae’s suite of onboard instruments.
“None of the candidate landing sites met all of the operational criteria at the 100% level, but Site J is clearly the best solution,” said Stephan Ulamec, Philae Lander Manager at the DLR German Aerospace Center.
Illustration of the Rosetta Missions Philae lander on final approach to a comet surface. The date is now set for landing, November 12. (Photo: ESA)
The mosaic above comprises two images taken by Rosetta’s OSIRIS (Optical, Spectroscopic, and Infrared Remote Imaging System) narrow-angle camera on Sept. 14 from a distance of about 30 km (18.6 miles). Image scale is 0.5 m/pixel.
As Comet 67P/CG continues toward perihelion its outgassing and sublimation jetting will undoubtedly increase, and Philae will be getting a front-row seat to the action.
“Site J is just 500-600 meters away from some pits and an area of comet outgassing activity,” said Holger Sierks, principal investigator for Rosetta’s OSIRIS camera from the Max Planck Institute for Solar System Research in Gottingen, Germany. “They will become more active as we get closer to the Sun.”
After completing a series of “Go/No-go” decisions by Rosetta’s flight dynamics team, Philae’s separation from Rosetta will occur on Nov. 12 at 08:35 GMT. It will land about seven hours later at around 15:30 GMT. Because of the distance to the comet and spacecraft — about 509 million km — confirmation of a successful touchdown won’t be received on Earth until 28 minutes and 20 seconds later. (And you thought Curiosity’s “seven minutes of terror” was nerve-wracking!)
Artist's impression of the 100-kg Philae lander (screenshot) Credit: ESA/DLR
In less than a month, on November 12, 2014, the 100-kg Philae lander will separate from ESA’s Rosetta spacecraft and descend several kilometers down to the dark, dusty and frozen surface of Comet 67P/Churyumov-Gerasimenko, its three spindly legs and rocket-powered harpoon all that will keep it from crashing or bouncing hopelessly back out into space. It will be the culmination of a decade-long voyage across the inner Solar System, a testament to human ingenuity and inventiveness and a shining example of the incredible things we can achieve through collaboration. But first, Philae has to get there… it has to touch down safely and successfully become, as designed, the first human-made object to soft-land on the nucleus of a comet. How will the little spacecraft pull off such a daring maneuver around a tumbling chunk of icy rubble traveling over 18 km/s nearly 509 million km away? The German Aerospace Center (DLR) has released a “trailer” for the event, worthy of the best sci-fi film. Check it out below.
Want to see more? Of course you do. Keep an eye out for the 11-minute short film “Landing on a Comet – The Rosetta Mission” to be released soon on YouTube here, and follow the latest news from the Rosetta mission here (and here on Universe Today, too!)
“The reason we’re at this comet is for science, no other reason. We’re doing this to get the best science. To characterize this comet has never been done before.”
Original Material: DLR (CC-BY 3.0)
Footage: ESA
Credit 67P image: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
Music: Omega by TimMcMorris
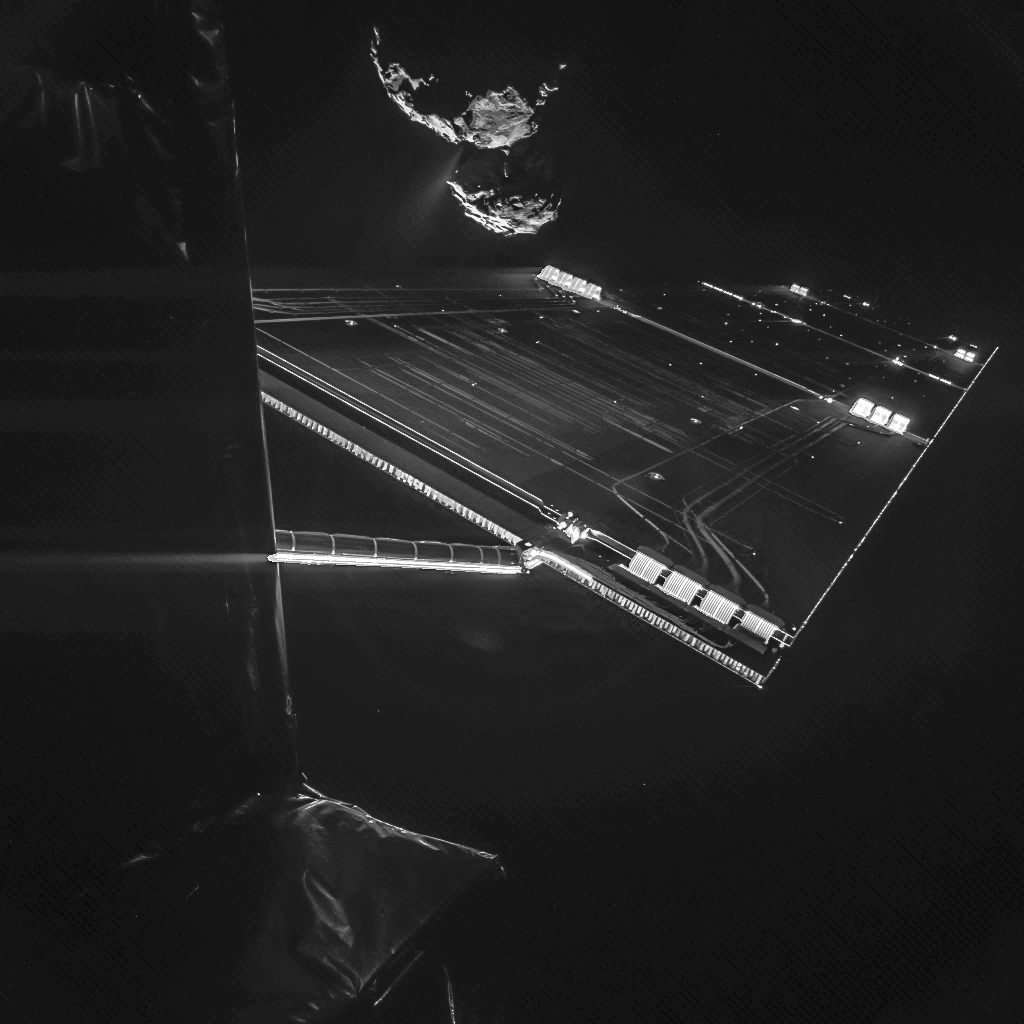
The Rosetta spacecraft takes a selfie Oct. 7 with its target, 67P/Churyumov–Gerasimenko, from an altitude of about 9.9 miles (16 kilometers). Credit: ESA/Rosetta/Philae/CIVA
So this spacecraft — taking this picture — is going to land on the surface of THAT comet. Doesn’t this give you a pit in your stomach? This is a selfie taken from the Philae spacecraft that, riding piggyback, captured the side of the Rosetta spacecraft orbiting Comet 67P/Churyumov-Gerasimenko.
The image is so close-up — just 9.9 miles (16 kilometers) from 67P’s surface — that mission planners can even spot Landing Site J on the comet’s smaller lobe.
“Two images, one with a short exposure time, one with a longer one, were combined to capture the whole dynamic range of the scene, from the bright parts of the solar arrays to the dark comet and the dark insulation cladding the Rosetta spacecraft,” the European Space Agency stated.
It’s quite the zoom-in after the last selfie that Philae produced for the public in September, which was taken from 31 miles (50 kilometers) away. The spacecraft is expected to make the first touchdown ever on a comet next month. Rosetta, meanwhile, will keep following 67P as it gets closest to the sun in 2015, between the orbits of Earth and Mars.
Tomorrow (Oct. 15), mission managers will announce if Site J is go or no go for a landing. More information is coming from Rosetta’s examination of the site from its new, lower altitude of 6.2 miles (10 kilometers).
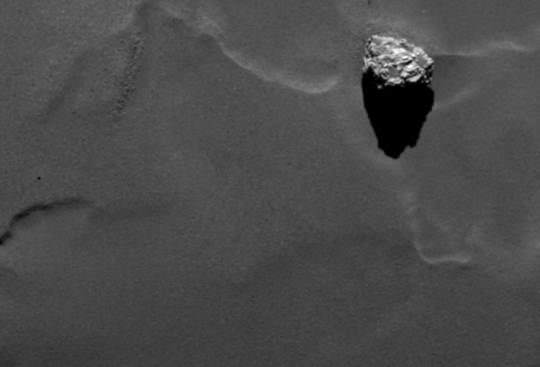
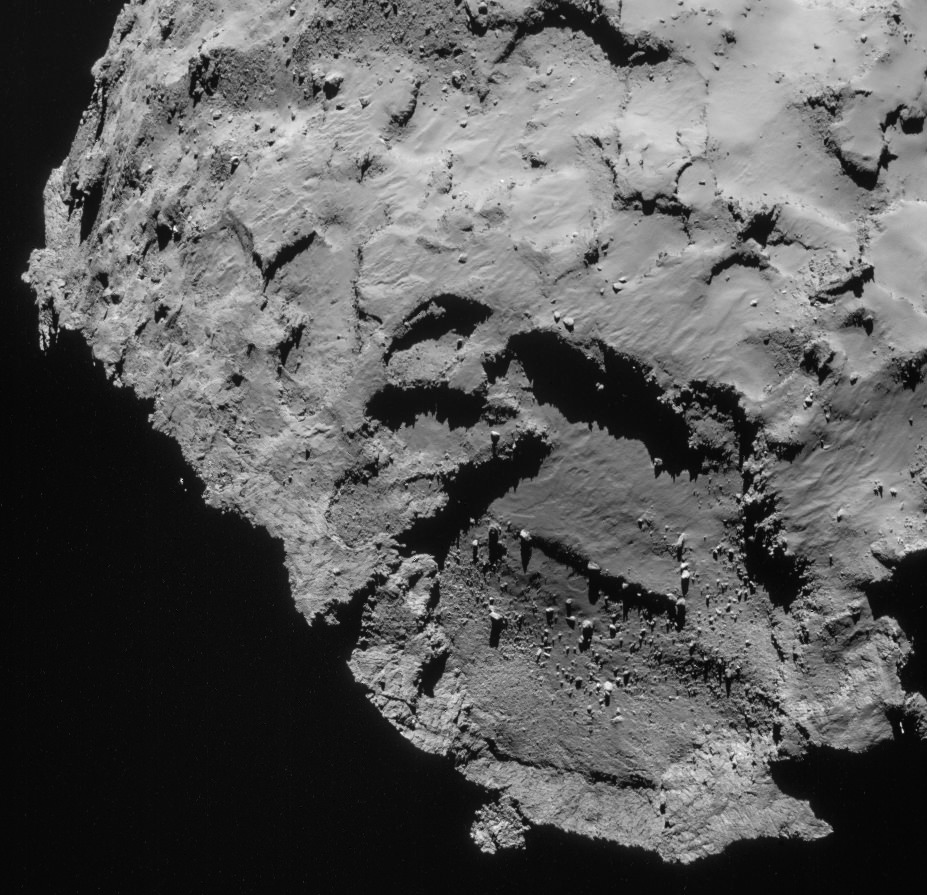
A close-up of a boulder nicknamed "Cheops" on the surface of 67P/Churyumov-Gerasimenko. Image taken by the Rosetta spacecraft. Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
As the Rosetta spacecraft drops a bit closer to its target comet, some really cool features are popping into view. For example, look at this picture of a 150-foot (45-meter) rock on Comet 67P/Churyumov-Gerasimenko, which was taken in September and released today (Oct. 9). And it’s led to the decision to have an Egyptian theme to naming features on the comet.
“It stands out among a group of boulders in the smooth region located on the lower side of 67P/C-G’s larger lobe,” ESA stated in a release. “This cluster of boulders reminded scientists of the famous pyramids at Giza near Cairo in Egypt, and thus it has been named Cheops for the largest of those pyramids, the Great Pyramid, which was built as a tomb for the pharaoh Cheops (also known as Kheops or Khufu) around 2550 BC.”
Scientists are still trying to figure out what the boulders are made of, and how they are formed, as the spacecraft moves into a “close observation phase” tomorrow (Oct. 10) where it is only 10 kilometers (6.2 miles) from the surface.
A wider field of view of 67P/Churyumov-Gerasimenko on the larger lobe, where the boulder Cheops is located. This picture was taken by the Rosetta spacecraft shortly after its arrival in August. Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
Meanwhile, some new results are coming from an asteroid that the spacecraft whizzed by a couple of years ago. In the picture below, you can see evidence of a crater that Rosetta didn’t even see!
The grooves you see there on Lutetia (which Rosetta imaged in 2010) hint at shock waves from various craters, including one that was likely on the hidden side of the asteroid relative to Rosetta as it flew by. The suspected crater is called “Suspicio.” While craters have been found in other asteroids visited by spacecraft, grooves are rarer.
“The way in which grooves are formed on these bodies is still widely debated, but it likely involves impacts,” ESA stated. “Shock waves from the impact travel through the interior of a small, porous body and fracture the surface to form the grooves.”
A paper on the research will be published in Planetary and Space Science this month, led by Sebastien Besse, a research fellow at ESA’s Technical Centre. For more information, check out this release from ESA.
A part of asteroid Lutetia imaged by the Rosetta spacecraft in 2010. The grooves you see are colored according to the crater scientists believe it’s associated with. The blue lines are from a suspected, unseen crater called “Suspicio”. Red is associated with the known crater Massilia and purple for the North Pole Crater Cluster. Yellow is unassociated with craters considered in this study. Credit: Data: Besse et al (2014); image: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
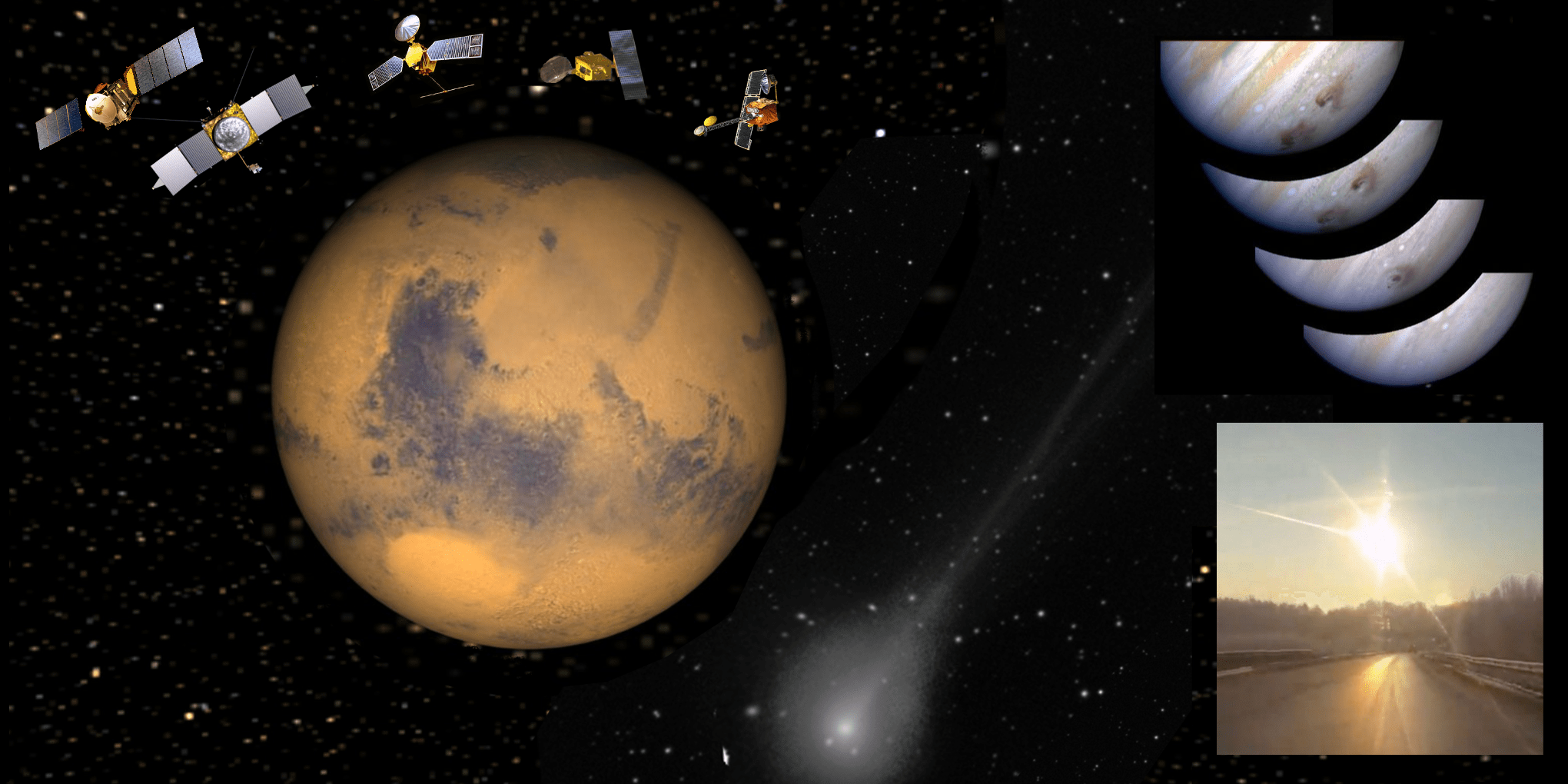
Five orbiters from India, the European Union and the United States will nestle behind the Mars as comet Siding Springs passes at a speed of 200,000 km/hr (125,000 mph). At right, Comet Shoemaker-Levy 9 impacts on Jupiter, the Chelyabinsk Asteroid over Russia. (Credits: NASA,ESA, ISRO)
It was 20 years ago this past July when images of Jupiter being pummeled by a comet caught the world’s attention. Comet Shoemaker-Levy 9 had flown too close to Jupiter. It was captured by the giant planet’s gravity and torn into a string of beads. One by one the comet fragments impacted Jupiter — leaving blemishes on its atmosphere, each several times larger than Earth in size.
Until that event, no one had seen a comet impact a planet. Now, Mars will see a very close passage of the comet Siding Spring on October 19th. When the comet was first discovered, astronomers quickly realized that it was heading straight at Mars. In fact, it appeared it was going to be a bulls-eye hit — except for the margin of error in calculating a comet’s trajectory from 1 billion kilometers (620 million miles, 7 AU) away.
It took several months of analysis for a cataclysmic impact on Mars to be ruled out. So now today, Mars faces just a cosmic close shave. But this comet packs enough energy that an impact would have globally altered Mars’ surface and atmosphere.
So what should we Earthlings gather from this and other events like it? Are we next? Why or why not should we be prepared for impacts from these mile wide objects?
For one, ask any dinosaur and you will have your answer.
An illustration of the Siding Spring comet in comparison to the Comet 67P atop Los Angeles. The original image was the focus of Bob King’s article – “What Comets, Parking Lots and Charcoal Have in Common“. (Credit: ESA, anosmicovni)
One can say that Mars was spared as were the five orbiting spacecraft from India (Mars Orbiter Mission), the European Union (Mars Express) and the United States (MOD, MRO, MAVEN). We have Scottish-Australian astronomer Robert McNaught to thank for discovering the comet on January 3, 2013, using the half meter (20 inch) Uppsala Southern Schmidt Telescope at Siding Spring, Australia.
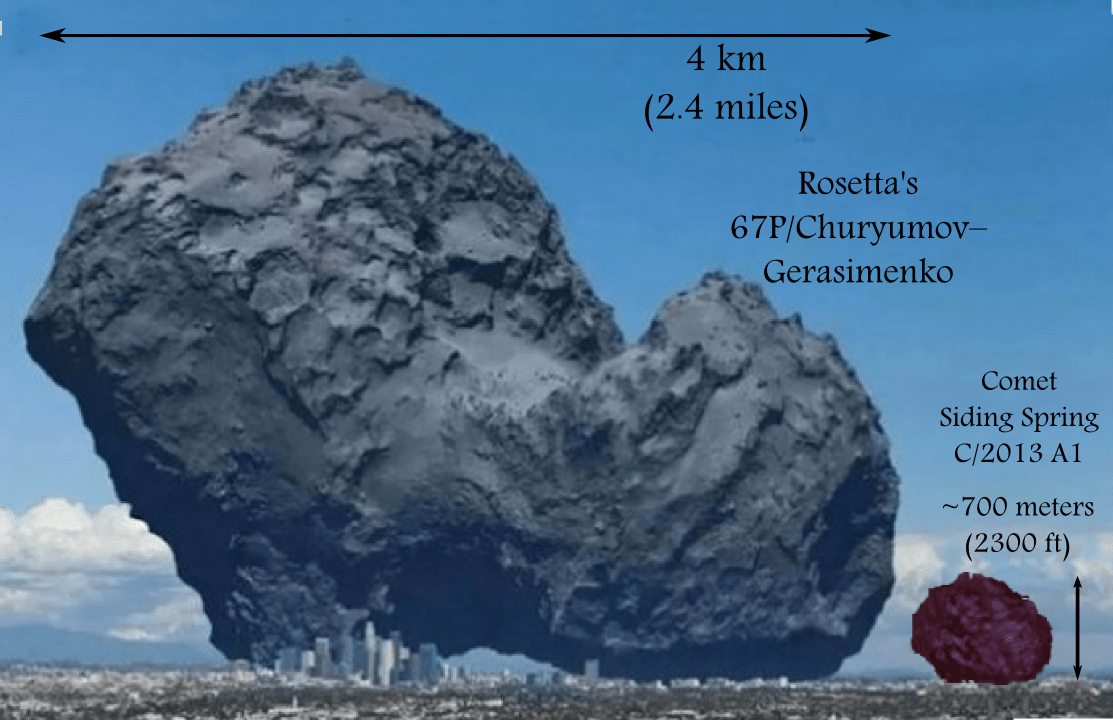
Initially the margin of error in the trajectory was large, but a series of observations gradually reduced the error. By late summer 2014, Mars was in the clear and astronomers could confidently say the comet would pass close but not impact. Furthermore, as observations accumulated — including estimates of the outpouring of gases and dust — comet Siding Spring shrunk in size, i.e. the estimates of potentially tens of kilometers were down to now 700 meters (4/10th of a mile) in diameter. Estimates of the gas and dust production are low and the size of the tail and coma — the spherical gas cloud surrounding the solid body — are small and only the outer edge of both will interact with Mars’ atmosphere.
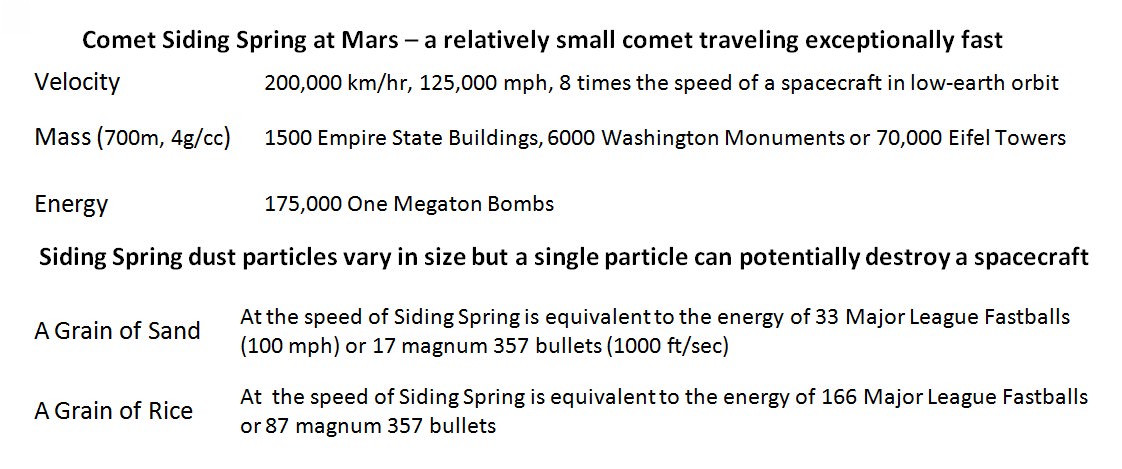
The mass, velocity and kinetic energy of celestial bodies can be deceiving. It is useful to compare the Siding Spring comet to common or man-made objects.
Yet, this is a close call for Mars. We could not rule out a collision for over six months. While this comet is small, it is moving relative to Mars at a speed of 200,000 kilometers/hour (125,000 mph, 56 km/sec). This small body packs a wallop. From high school science or intro college Physics, many of us know that the kinetic energy of an object increases by the square of the velocity. Double the velocity and the energy of the object goes up by 4, increase by 3 – energy increases by 9.
So the close shave for Mars is yet another wake up call for the “intelligent” space faring beings of the planet Earth. A wake up call because the close passage of a comet could have just as easily involved Earth. Astronomers would have warned the world of a comet heading straight for us, one that could wipe out 70% of all life as happened 65 million years ago to the dinosaurs. Replace dinosaur with humans and you have the full picture.
Time would have been of the essence. The space faring nations of the world — those of the EU, and Russia, the USA, Japan and others — would have gathered and attempted to conceive some spacecrafts with likely nuclear weapons that could be built and launched within a few months. Probably several vehicles with weapons would be launched at once, leaving Earth as soon as possible. Intercepting a comet or asteroid further out would give the impulse from the explosions more time to push the incoming body away from the Earth.
There is no way that humanity could sit on their collective hands and wait for astronomers to observe and measure for months until they could claim that it would just be a close call for Earth. We could imagine the panic it would cause. Recall the scenes from Carl Sagan’s movie Contact with people of every persuasion expressing at 120 decibels their hopes and fears. Even a small comet or asteroid, only a half kilometer – a third of a mile in diameter would be a cataclysmic event for Mars or Earth.
But yet, in the time that has since transpired from discovery of the comet Siding Spring (1/3/2013), the Chelyabinsk asteroid (~20 m/65 ft) exploded in an air burst that injured 1500 people in Russia. The telescope that discovered Comet Siding Spring was decommissioned in late 2013 and the Southern Near-Earth Object Survey was shutdown. This has left the southern skies without a dedicated telescope for finding near-Earth asteroids. And proposals such as the Sentinel project by the B612 Foundation remain underfunded.
We know of the dangers from small celestial bodies such as comets or asteroids. Government organizations in the United States and groups at the United Nations are discussing plans. There is plenty of time to find and protect the Earth but not necessarily time to waste.
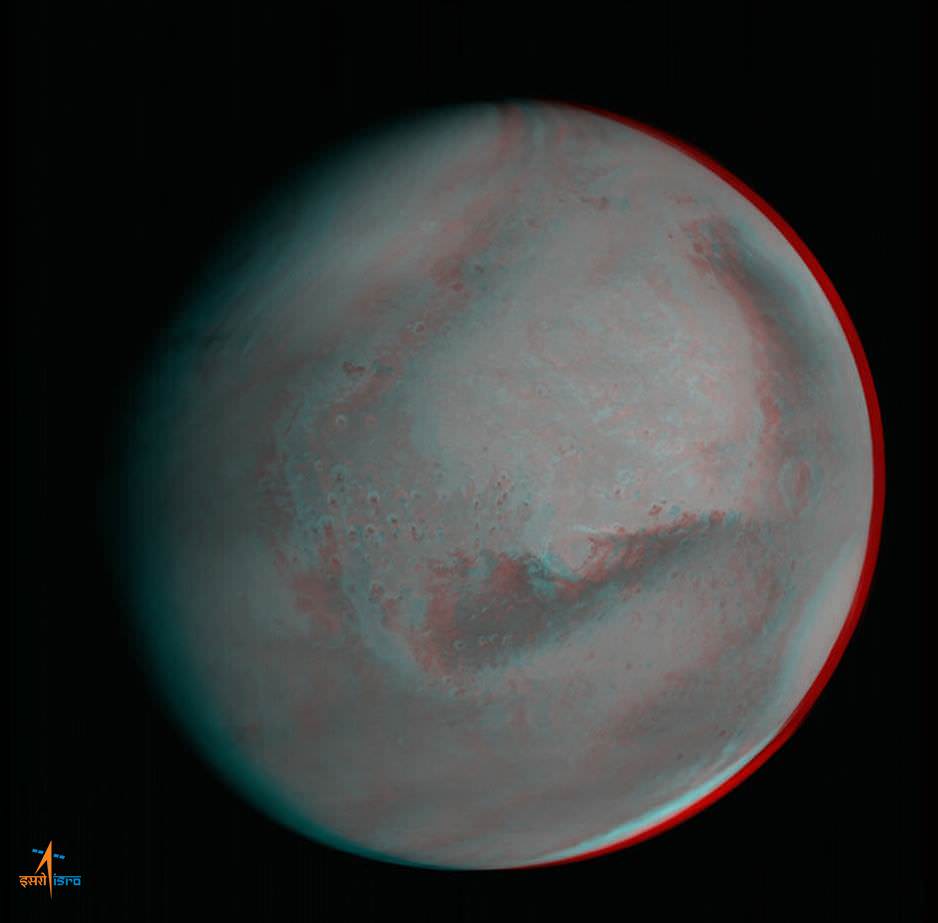
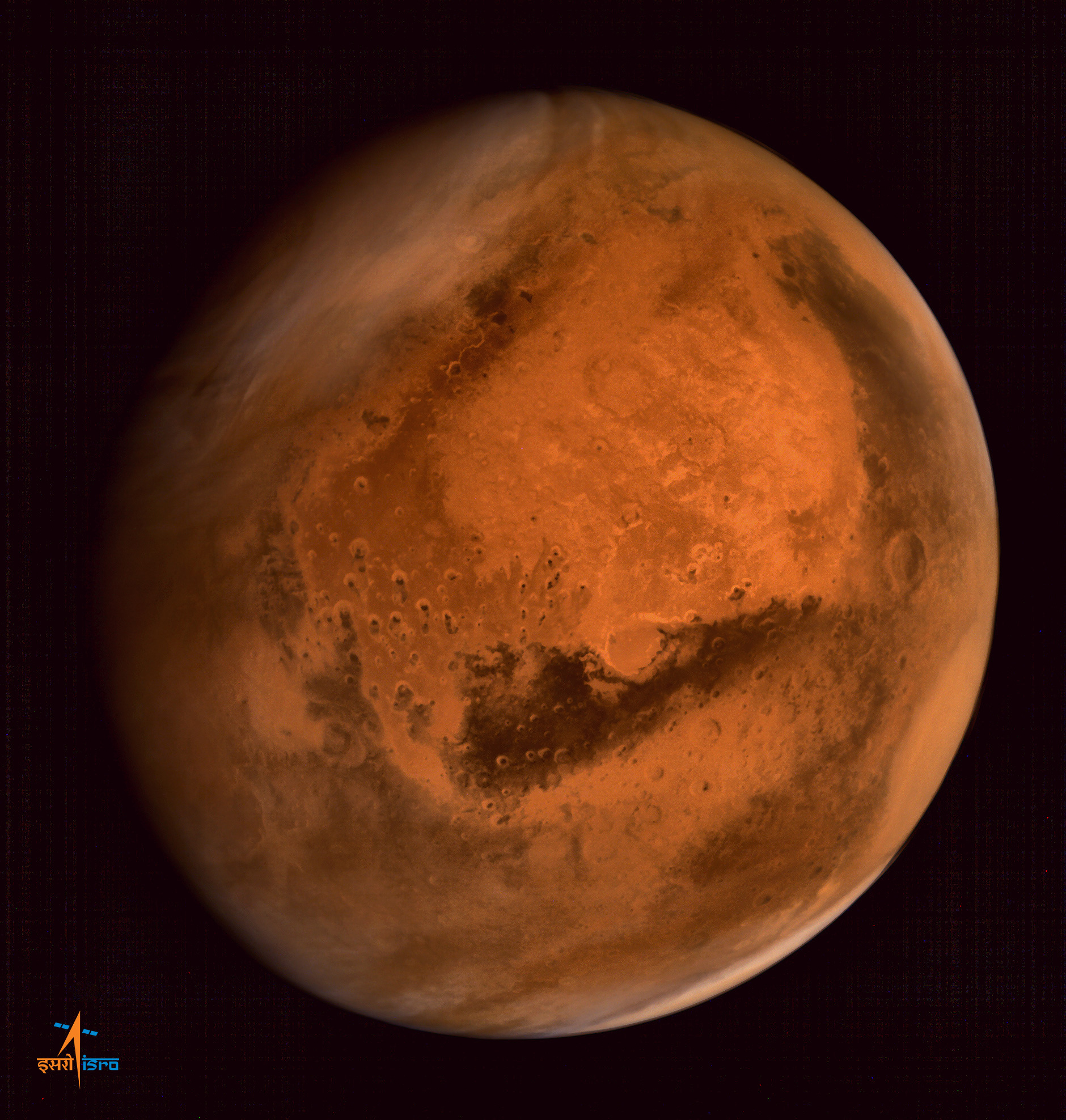
3-D image of Mars generated from multiple pictures acquired by Mars Color Camera on-board Mars Orbiter Spacecraft on Sept 28, 2014. Credit: ISRO
Here’s another breathtakingly glorious view from India’sMars Orbiter Mission (MOM) – her first global 3-D portrait of her new home careening around the Red Planet.
MOM is India’s first deep space voyager to explore beyond the confines of her home planet’s influence and just successfully arrived at the Red Planet after the “history creating” orbital insertion maneuver on Sept. 23/24 following a ten month journey.
This newly released 3-D view from MOM expands upon the initial 2-D global color view of Mars released by the Indian Space Research Organization (ISRO), India’s space agency. See below and detailed in my earlier story – here.
The 3-D image was generated from multiple pictures acquired by MOM’s on-board Mars Color Camera on Sept 28, 2014, from the very high altitude of approximately 74,500 kilometers as the spacecraft orbits Mars.
ISRO’s Mars Orbiter Mission captures spectacular portrait of the Red Planet and swirling dust storms with the on-board Mars Color Camera from an altitude of 74,500 km on Sept. 28, 2014. Credit: ISRO
The images were taken by the tri-color camera as MOM swooped around the Red Planet in a highly elliptical orbit whose nearest point to Mars (periapsis) is at 421.7 km and farthest point (apoapsis) at 76,993.6 km, according to ISRO.
Therefore, the 3-D Red Planet portrait was captured nearly at apoapsis. And being three dimensional, it gives a stereo sense of the huge dust storm swirling over a large swath of the planet’s Northern Hemisphere set against the blackness of space.
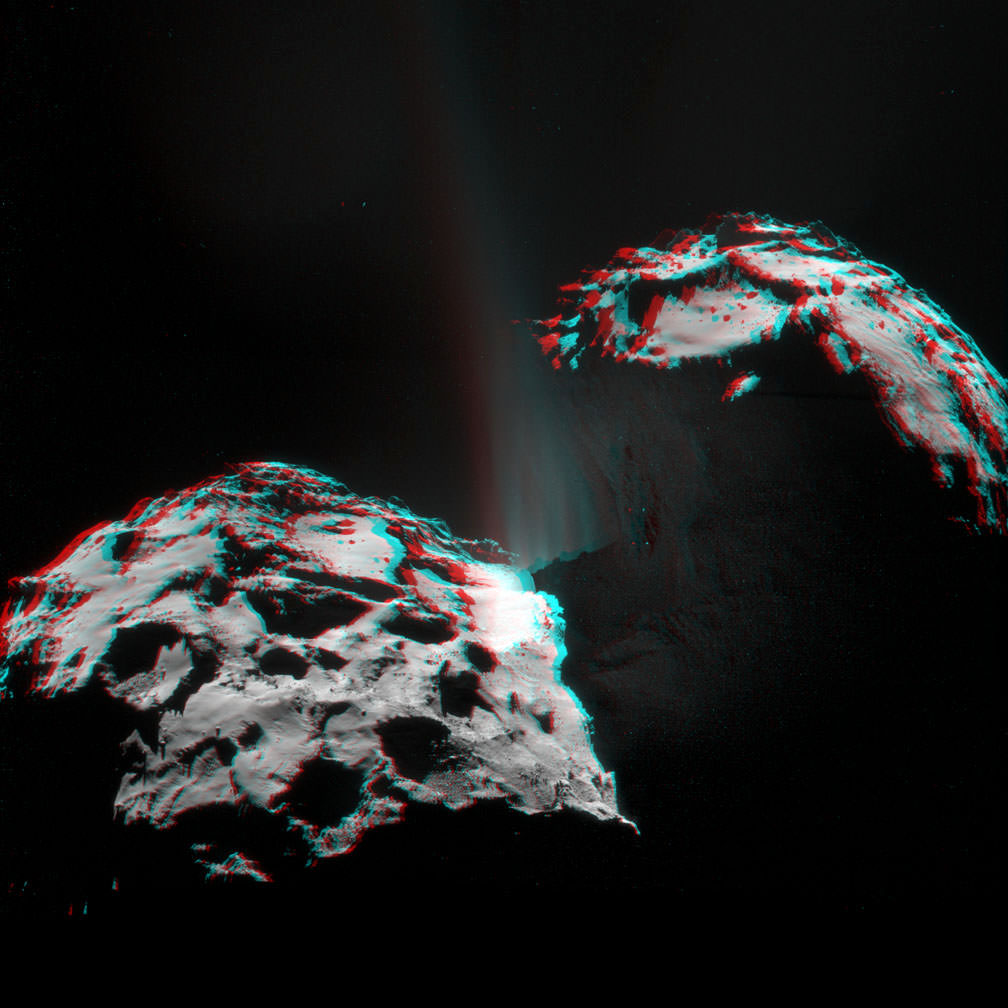
Below right is the southern polar ice cap. To see the 3-D effect, whip out your handy pair of left-eye red, right-eye blue color anaglyph glasses.
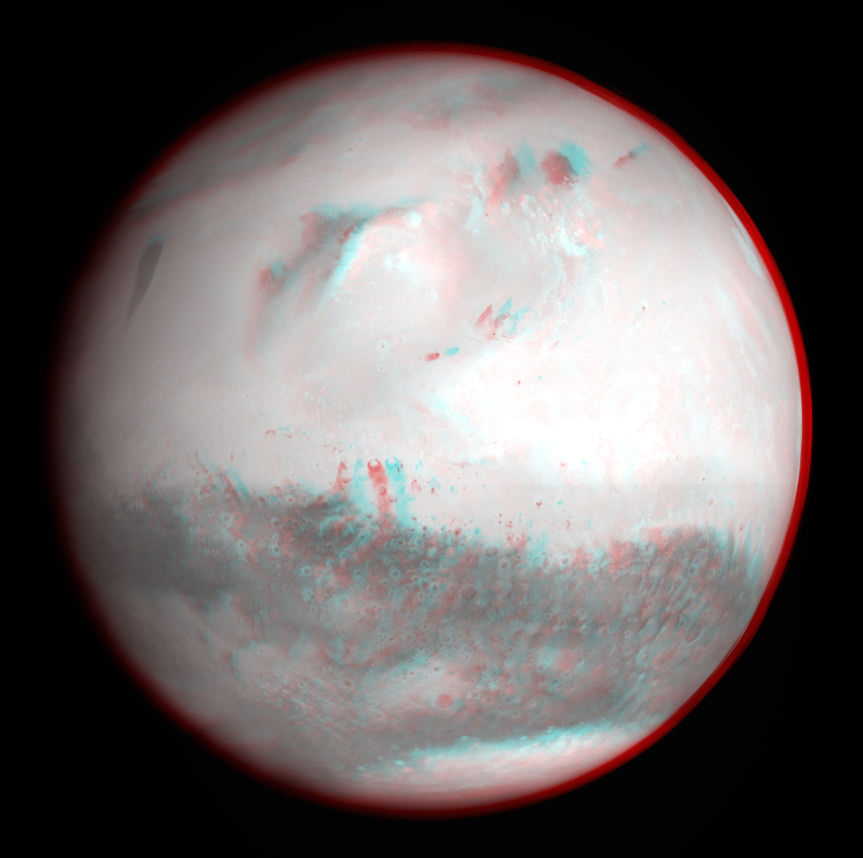
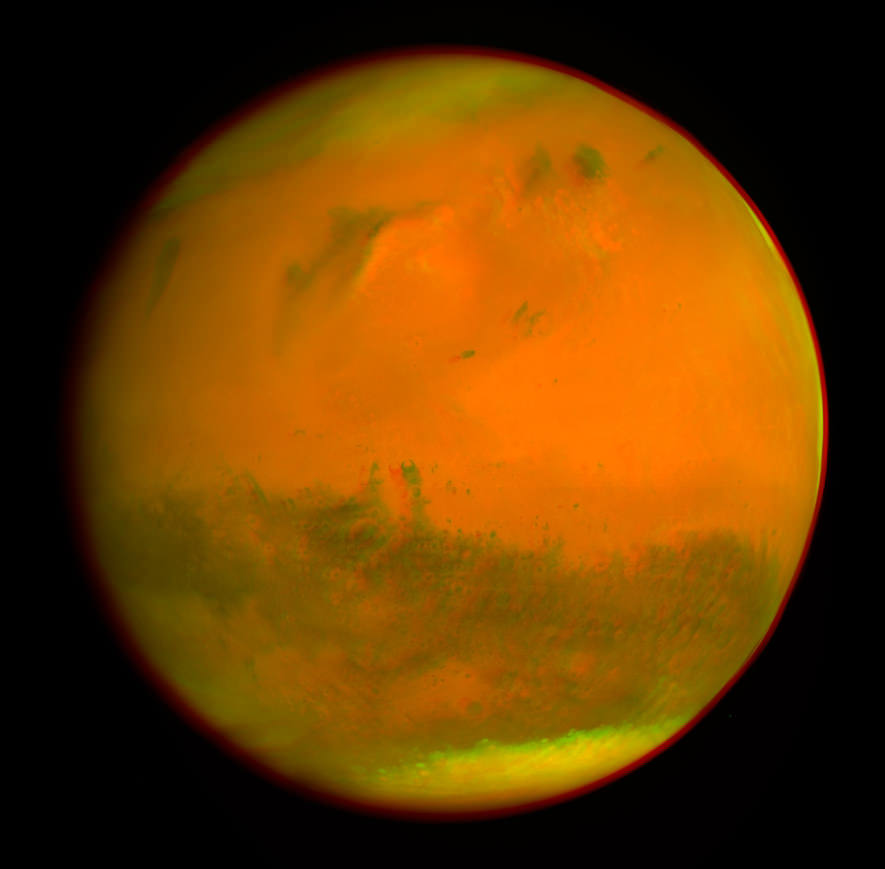
And while we’re on the subject of spacely 3-D, it’s worth noting that another of humanity’s ground breaking probes currently making news – ESA’s comet hunting Rosetta probe – likewise snapped a glorious 3-D view of Mars way back in 2007, during the brief, but critical, gravity assist slingshot maneuver that flung Rosetta along her vast 10 year path through interplanetary space.
So by way of comparison let’s take a trip down memory lane and be sure to look back at Rosetta’s global 3-D Martian views (below) taken by the high resolution OSIRIS camera on 24 February 2007 at 19:28 CET from a distance of about 240,000 kilometers.
Mars 3-D anaglyph (black & white) taken by ESA’s Rosetta spacecraft during Mars flyby on 24 February 2007 from a distance of about 240,000 km. Image resolution is about 5 km. Credit: MPS for OSIRIS Team MPS/UPD/LAM/ IAA/ RSSD/ INTA/ UPM/ DASP/ IDA
The Rosetta team created both color and black & white 3-D views of Mars.
Mars 3-D anaglyph (color) taken by ESA’s Rosetta spacecraft during Mars flyby on 24 February 2007 from a distance of about 240,000 km. Image resolution is about 5 km. Credit: MPS for OSIRIS Team MPS/UPD/LAM/ IAA/ RSSD/ INTA/ UPM/ DASP/ IDA
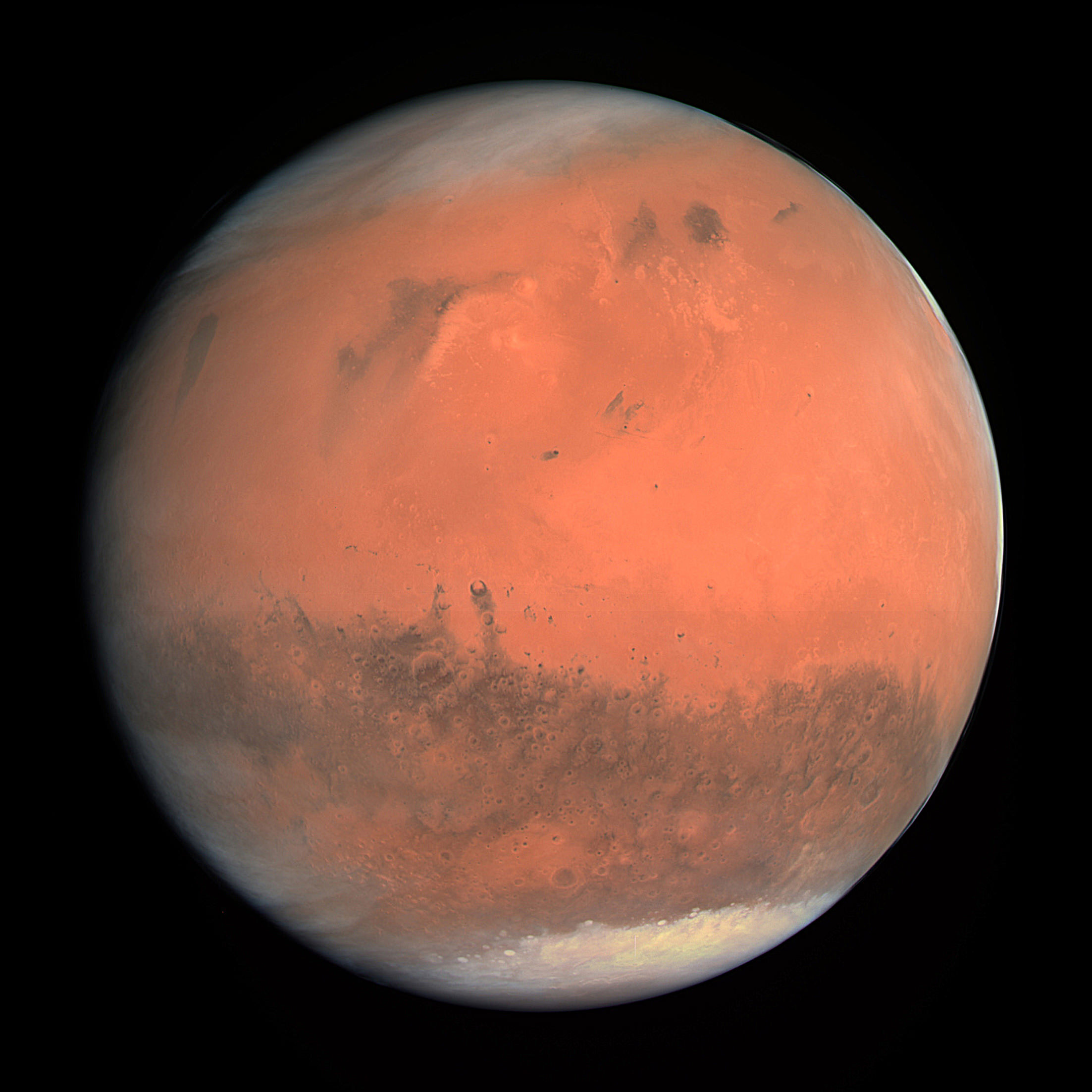
And be sure to check out Rosetta’s 2-D true color view showing a different swatch of the Red Planet compared to MOM, along with a more expansive view of the southern polar ice cap.
The first true-color image of Mars from ESA’s Rosetta generated using the OSIRIS orange (red), green and blue color filters. The image was acquired on 24 February 2007 at 19:28 CET from a distance of about 240,000 km; image resolution is about 5 km/pixel. Credit: MPS for OSIRIS Team MPS/UPD/LAM/ IAA/ RSSD/ INTA/ UPM/ DASP/ IDA
The $73 million MOM mission is expected to last at least six months.
MOM’s success follows closely on the heels of NASA’s MAVEN orbiter which also successfully achieved orbit barely two days earlier on Sept. 21 and could last 10 years or more.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
3D view created by Mattias Malmer of the recent ESA image (below) showing multiple jets of gas and dust spraying from Comet 67P/Churyumov-Gerasimenko. Grab your red-blue plastic glasses and prepare to enter another dimension. Malmer created the view by draping a navigation camera image over a 3D model of the comet and then photographing it from two slightly different perspectives. Click for large version. Credit: ESA/Rosetta/NAVCAM/processing by Mattias Malmer
She’s gonna blow! Rosetta’s navigation camera recently grabbed our best view yet of the geyser-like jets spraying from the nucleus of Comet 67P/Churyumov-Gerasimenko. They were taken on September 26 as the spacecraft orbited the comet at a distance of just 16 miles (26 km) and show jets of water vapor and dust erupting from several discrete locations beneath the surface along the neck region of the comet’s nucleus. Mattias Malmer, a 3D technical director, created the spectacular 3D views by draping the navigation camera images over a 3D model of the comet and then photographing it from two slightly different perspectives.
Jets of gas and dust are seen escaping comet 67P/C-G on September 26 in this four-image mosaic. Click to enlarge. Credit: ESA/Rosetta/NAVCAM
Jets form when the sun warms the comet’s coal-black surface, causing ices beneath to sublimate or change directly from solid to gas without becoming liquid. This is possible because of the near-zero atmospheric pressure at the comet. Pressure builds in the pockets of gas until they find escape through cracks or pores as plume-like jets. Comet dust along with the gas fashions the coma and tail over time. Something similar happens when you shake up a bottle of champagne and then loosen the cork. Trapped carbon dioxide (what makes the “fizz”) blasts the cork across the room.
Comet Churyumov-Gerasimenko rotating from darkness into light. (Mattias Malmer)
If you liked the still images, check out these videos by Malmer. He used the same draping technique and then animated the stills. Be sure to stop by his Cascade of Light blog for more images and videos when you get a chance.
Comet Churyumov-Gerasimenko rotating in 3D (Mattias Malmer)
I saved the best for last. What majesty!
3D rotation of Comet 67P/C-G with jets (Mattias Malmer)
Illustration of the Rosetta Missions Philae lander on final approach to a comet surface. (Photo: ESA)
ESA Rosetta mission planners have selected November 12th, one day later than initially planned, for the historic landing of Philae on a comet’s surface. The landing on 67P/Churyumov-Gerasimenko will be especially challenging for the washing machine-sized lander. While mission scientists consider their choice of comet for the mission to be an incredibly good one for scientific investigation and discovery, the irregular shape and rugged terrain also make for a risky landing. The whole landing is not unlike the challenge one faces in shooting a moving target in a carnival arcade game; however, this moving target is 20 kilometers below and it is also rotating.
At 8:35 GMT (3:35 AM EST), the landing sequence will begin with release of Philae by Rosetta at an altitude of 20 kilometers above the comet. The expected time of touchdown is seven hours later – 15:35 GMT (10:35 AM EST). During the descent, Philae’s ROLIS camera will take a continuous series of photos. The comet will complete more than half a rotation during the descent; comet P67’s rotation rate is 12.4 hours. The landing site will actually be on the opposite side of the comet when Philae is released and will rotate around, and if all goes as planned, meet Philae at landing site J.
Before November 12th, mission planners will maintain the option of landing at Site C. If the alternate site is chosen, the descent will begin at 13:04 GMT also on November 12 but from an altitude of 12.5 kilometers, a 4 hour descent time.
NAVCAM image of the comet on 21 September, which includes a view of primary landing site J. Click for more details and link to context image. (Credits: ESA/Rosetta/NAVCAM)
Rosetta will eject Philae with an initial velocity of approximately 2 1/2 kilometers per hour. Because the comet is so small, its gravity will add little additional speed to Philae as it falls to the surface. Philae is essentially on a ballistic trajectory and does not have any means to adjust its path.
The actions taken by Philae’s onboard computer begin only seconds from touchdown. It has a landing propulsion system but unlike conventional systems that slow down the vehicle for soft landing, Philae’s is designed to push the lander snugly onto the comet surface. There is no guarantee that Philae will land on a flat horizontal surface. A slope is probably more likely and the rocket will force the small lander’s three legs onto the slope.
A model of the comet P67/Churyumov-Gerasimenko created using images from the Rosetta OSIRIS narrow field camera. Mouse click on the image to start the animated GIF. (Credit: ESA)
Landing harpoons will be fired that are attached to cables that will be pulled in to also help Philae return upright and attach to the surface. Philae could actually bounce up or topple over if the rocket system and harpoons fail to do their job.
The Philae Lander anchoring harpoon with the integrated MUPUS-accelerometer and temperature sensor. (Credit: “Philae Lander Fact Sheet”, ESA)
However, under each of the three foot pads, there are ice screws that will attempt to drill and secure Philae to the surface. This will depend on the harpoons and/or rockets functioning as planned, otherwise the action of the drills could experience resistance from hard ground and simply push the lander up rather than secure it down. Philae also has a on-board gyro to maintain its attitude during descent, and an impact dampener on the neck of the vehicle which attaches the main body to the landing struts.
Ten landing sites were picked, then down-selected to five, and then finally on September 15th, they selected Site J on the head of the smaller lobe – the head of the rubber duck, with site C as a backup. Uncertainty in the release and the trajectory of the descent to the comet’s surface means that the planners needed to find a square kilometer area for landing. But comet 67P/Churyumov-Gerasimenko simply offered no site with that much flat area clear of cliffs and boulders. Philae will be released to land at Site J which offers some smooth terrain but only about a quarter of the area needed to assure a safe landing. Philae could end up landing on the edge of a cliff or atop a large boulder and topple over.
A ‘color’ view of Comet 67P, from a September 24, 2014 NavCam image. Credits: ESA/Rosetta/NavCam – Processing by Elisabetta Bonora & Marco Faccin.
The Rosetta ground control team will have no means of controlling and adjusting Philae during the descent. This is how it had to be because the light travel time for telecommunications from the spacecraft to Earth does not permit real-time control. The execution time and the command sequence will be delivered to Rosetta days before the November 12th landing. And ground control must maneuver Rosetta with Philae still attached to an exact point in space where the release of Philae must take place. Any inaccuracy in the initial release point will be translated all the way down to the surface and Philae would land some undesired distance away from Site J. However, ground controllers have a month and a half to practice simulations of the landing many times over with a model of the comet’s nucleus. With practice and more observational data between now and the landing, the initial conditions and model of the comet in the computer simulation will improve and raise the likelihood of a close landing to Site J.
Previous Universe Today articles on Rosetta’s Philae:
Rosetta's Philae lander is Like a modern-day Swiss Army Knife, now prepared for a November 11th dispatch to a comet's surface.
When traveling to far off lands, one packs carefully. What you carry must be comprehensive but not so much that it is a burden. And once you arrive, you must be prepared to do something extraordinary to make the long journey worthwhile.
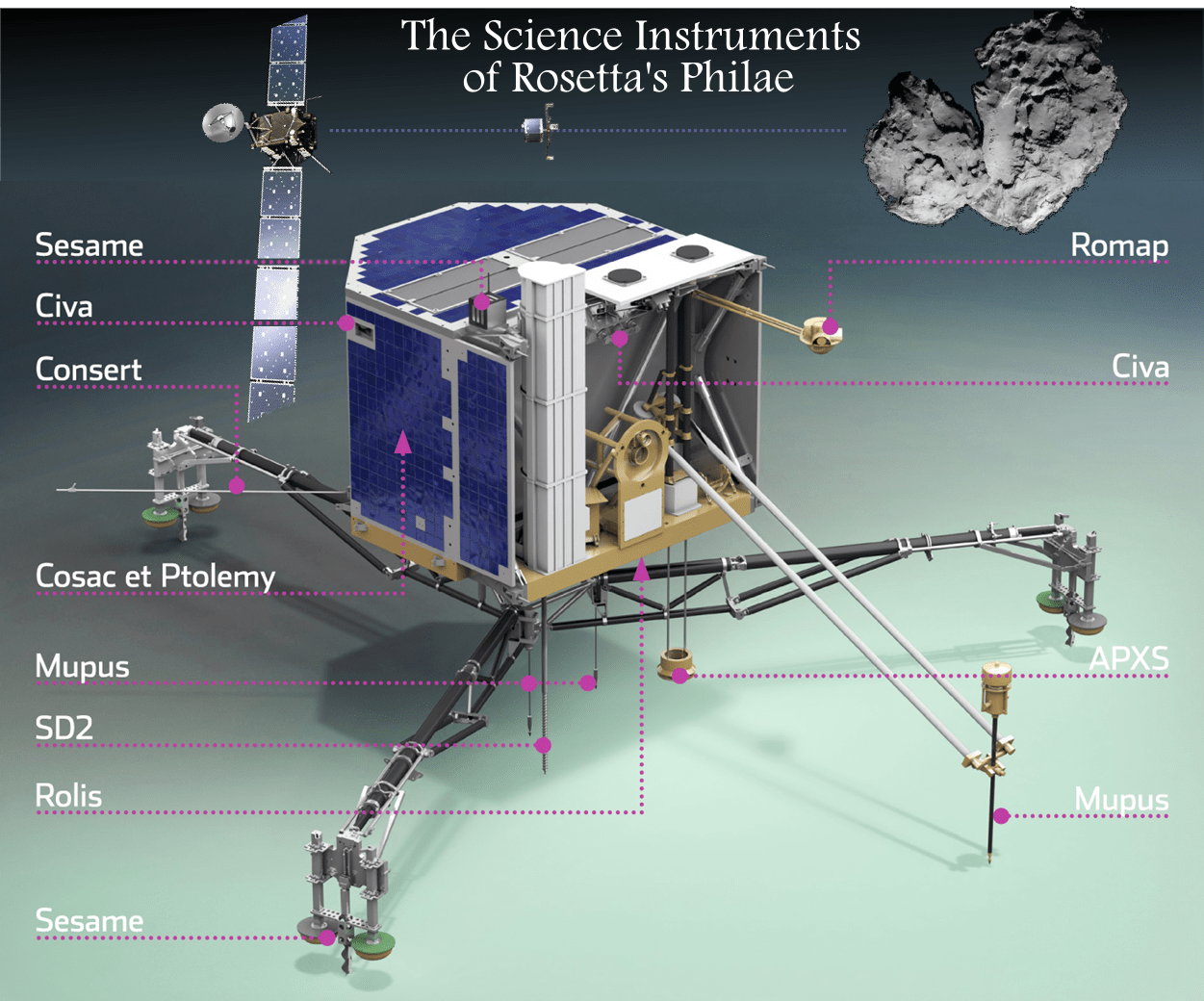
The previous Universe Today article “How do you land on a Comet?” described Philae’s landing technique on comet 67P/Churyumov-Gerasimenko. But what will the lander do once it arrives and gets settled in its new surroundings? As Henry David Thoreau said, “It is not worthwhile to go around the world to count the cats in Zanzibar.” So it is with the Rosetta lander Philae. With the stage set – a landing site chosen and landing date of November 11th, the Philae lander is equipped with a carefully thought-out set of scientific instruments. Comprehensive and compact, Philae is a like a Swiss Army knife of tools to undertake the first on-site (in-situ) examination of a comet.
Now, consider the scientific instruments on Philae which were selected about 15 years ago. Just like any good traveler, budgets had to be set which functioned as constraints on the instrument selection that could be packed and carried along on the journey. There was a maximum weight, maximum volume, and power. The final mass of Philae is 100 kg (220 lbs). Its volume is 1 × 1 × 0.8 meters (3.3 × 3.3 × 2.6 ft) about the size of a four burner oven-range. However, Philae must function on a small amount of stored energy upon arrival: 1000 Watt-Hours (equivalent of a 100 watt bulb running for 10 hours). Once that power is drained, it will produce a maximum of 8 watts of electricity from Solar panels to be stored in a 130 Watt-Hour battery.
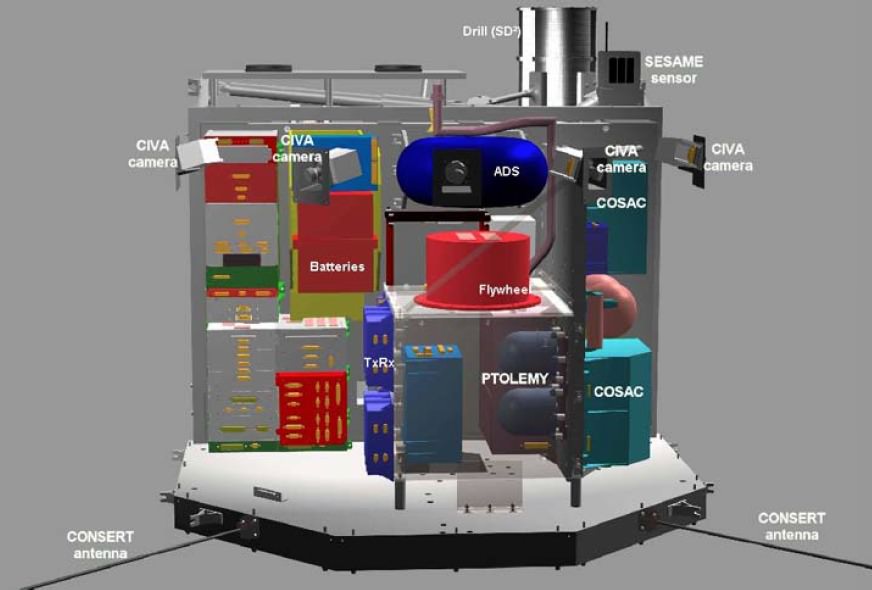
Side view schematics of the inner structure of the lander compartment showing the location of COSAC, PTOLEMY, the CONSERT antennas, the SESAME dust sensor and ÇIVA cameras. Philae is about the size of a dishwasher or four burner oven. (Credits: “Capabilities of Philae, the Rosetta Lander, J. Biele, S. Ulamec, September 2007)
Without any assurance that they would land fortuitously and produce more power, the Philae designers provided a high capacity battery that is charged, one time only, by the primary spacecraft solar arrays (64 sq meters) before the descent to the comet. With an initial science command sequence on-board Philae and the battery power stored from Rosetta, Philae will not waste any time to begin analysis — not unlike a forensic analysis — to do a “dissection” of a comet. Thereafter, they utilize the smaller battery which will take at least 16 hours to recharge but will permit Philae to study 67P/Churyumov-Gerasimenko for potentially months.
There are 10 science instrument packages on the Philae lander. The instruments use absorbed, scattered, and emitted light, electrical conductivity, magnetism, heat, and even acoustics to assay the properties of the comet. Those properties include the surface structure (the morphology and chemical makeup of surface material), interior structure of P67, and the magnetic field and plasmas (ionized gases) above the surface. Additionally, Philae has an arm for one instrument and the Philae main body can be rotated 360 degrees around its Z-axis. The post which supports Philae and includes a impact dampener.
CIVA and ROLIS imaging systems. CIVA represents three cameras which share some hardware with ROLIS. CIVA-P (Panoramic) is seven identical cameras, distributed around the Philae body but with two functioning in tandem for stereo imaging. Each has a 60 degree field of view and uses as 1024×1024 CCD detector. As most people can recall, digital cameras have advanced quickly in the last 15 years. Philae’s imagers were designed in the late 1990s, near state-of-the-art, but today they are surpassed, at least in number of pixels, by most smartphones. However, besides hardware, image processing in software has advanced as well and the images may be enhanced to double their resolution.
CIVA-P will have the immediate task, as part of the initial autonomous command sequence, of surveying the complete landing site. It is critical to the deployment of other instruments. It will also utilize the Z-axis rotation of the Philae body to survey. CIVA-M/V is a microscopic 3-color imager (7 micron resolution) and CIVA-M/I is a near infra-red spectrometer (wavelength range of 1 to 4 microns) that will inspect each of the samples that is delivered to the COSAC & PTOLEMY ovens before the samples are heated.
The CIVA micro-camera. Mass: less than 100 grams, Power: less than 2 Watts, Minimum Operating Temperature: -120C (Credit:ESA, Philae Lander Fact Sheet)
ROLIS is a single camera, also with a 1024×1024 CCD detector, with the primary role of surveying the landing site during the descent phase. The camera is fixed and downward pointing with an f/5 (f-ratio) focus adjustable lens with a 57 degree field of view. During descent it is set to infinity and will take images every 5 seconds. Its electronics will compress the data to minimize the total data that must be stored and transmitted to Rosetta. Focus will adjust just prior to touchdown but thereafter, the camera functions in macro mode to spectroscopically survey the comet immediately underneath Philae. Rotation of the Philae body will create a “working circle” for ROLIS.
The multi-role design of ROLIS clearly shows how scientists and engineers worked together to overall reduce weight, volume, and power consumption, and make Philae possible and, together with Rosetta, fit within payload limits of the launch vehicle, power limitations of the solar cells and batteries, limitations of the command and data system and radio transmitters.
Philae’s APXS – Alpha Proton X-Ray Spectrometer (Credit: Inst. for Inorganic Chemistry & Analytical Chemistry, Max-Planck Institute for Chemistry)
APXS. This is a Alpha Proton X-ray Spectrometer. This is a near must-have instrument of the space scientist’s Swiss Army Knife. APXS spectrometers have become a common fixture on all Mars Rover missions and Philae’s is an upgraded version of Mars Pathfinder’s. The legacy of the APXS design is the early experiments by Ernest Rutherford and others that led to discovering the structure of the atom and the quantum nature of light and matter.
This instrument has a small source of Alpha particle emission (Curium 244) essential to its operation. The principles of Rutherford Back-scattering of Alpha particles is used to detect the presence of lighter elements such as Hydrogen or Beryllium (those close to an Alpha particle in mass, a Helium nucleus). The mass of such lighter elemental particles will absorb a measurable amount of energy from the Alpha particle during an elastic collision; as happens in Rutherford back-scattering near 180 degrees. However, some Alpha particles are absorbed rather than reflected by the nuclei of the material. Absorption of an Alpha particle causes emission of a proton with a measurable kinetic energy that is also unique to the elemental particle from which it came (in the cometary material); this is used to detect heavier elements such as magnesium or sulfur. Lastly, inner shell electrons in the material of interest can be expelled by Alpha particles. When electrons from outer shells replace these lost electrons, they emit an X-Ray of specific energy (quantum) that is unique to that elementary particle; thus, heavier elements such as Iron or Nickel are detectable. APXS is the embodiment of early 20th Century Particles Physics.
CONSERT.COmet Nucleus Sounding Experiment by Radio wave Transmission, as the name suggests, will transmit radio waves into the comet’s nucleus. The Rosetta orbiter transmits 90 MHz radio waves and simultaneously Philae stands on the surface to receive with the comet residing between them. Consequently, the time of travel through the comet and the remaining energy of the radio waves is a signature of the material through which it propagated. Many radio transmissions and receptions by CONSERT through a multitude of angles will be required to determine the interior structure of the comet. It is similar to how one might sense the shape of a shadowy object standing in front of you by panning one’s head left and right to watch how the silhouette changes; altogether your brain perceives the shape of the object. With CONSERT data, a complex deconvolution process using computers is necessary. The precision to which the comet’s interior is known improves with more measurements.
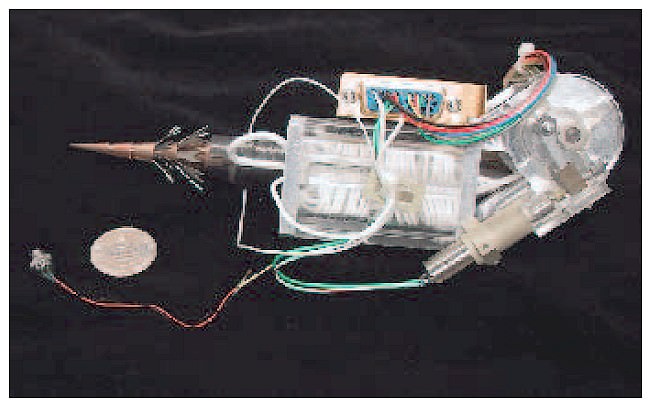
MUPUS.Multi-Purpose Sensor for Surface and Subsurface Science is a suite of detectors for measuring the energy balance, thermal and mechanical properties of the comet’s surface and subsurface down to a depth of 30 cm (1 foot). There are three major parts to MUPUS. There is the PEN which is the penetrator tube. PEN is attached to a hammering arm that extends up to 1.2 meters from the body. It deploys with sufficient downward force to penetrate and bury PEN below the surface; multiple hammer strokes are possible. At the tip, or anchor, of PEN (the penetrator tube) is an accelerometer and standard PT100 (Platinum Resistance Thermometer). Together, the anchor sensors will determine the hardness profile at the landing site and the thermal diffusivity at the final depth [ref]. As it penetrates the surfaces, more or less deceleration indicates harder or softer material. The PEN includes an array of 16 thermal detectors along its length to measure subsurface temperatures and thermal conductivity. The PEN also has a heat source to transmit heat to the cometary material and measure its thermal dynamics. With the heat source off, detectors in PEN will monitor the temperature and energy balance of the comet as it approaches the Sun and heats up. The second part is the MUPUS TM, a radiometer atop the PEN which will measure thermal dynamics of the surface. TM consists of four thermopile sensors with optical filters to cover a wavelength range from 6-25 µm.
SD2 Sample Drill and Distribution device will penetrate the surface and subsurface to a depth of 20 cm. Each retrieved sample will be a few cubic millimeters in volume and distributed to 26 ovens mounted on a carousel. The ovens heat the sample which creates a gas that is delivered to the gas chromatographs and mass spectrometers that are COSAC and PTOLEMY. Observations and analysis of APXS and ROLIS data will be used to determine the sampling locations all of which will be on a “working circle” from the rotation of Philae’s body about its Z-axis.
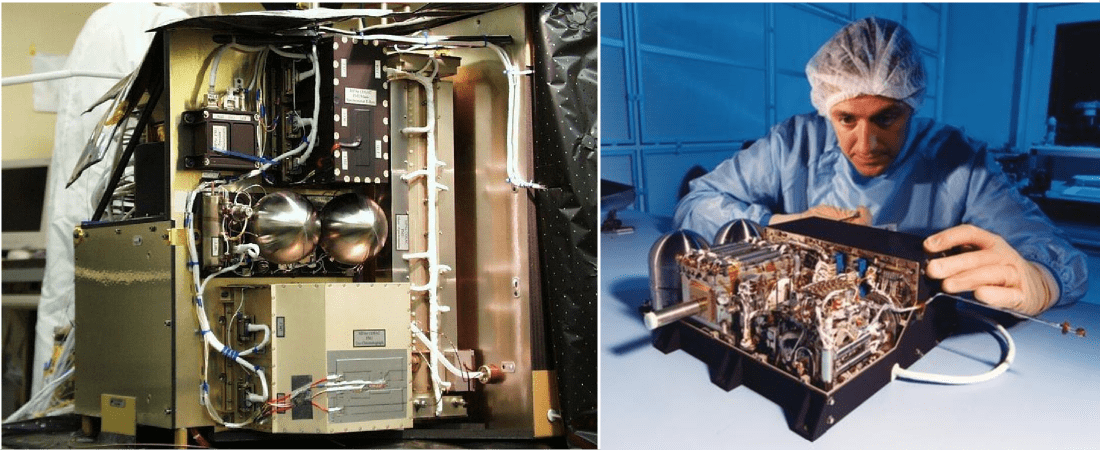
COSACCometary Sampling and Composition experiment. The first gas chromatograph (GC) I saw was in a college lab and was being used by the lab manager for forensic tests supporting the local police department. The intent of Philae is nothing less than to perform forensic tests on a comet hundred of million of miles from Earth. Philae is effectively Sherlock Holmes’ spy glass and Sherlock is all the researchers back on Earth. The COSAC gas chromatograph includes a mass spectrometer and will measure the quantities of elements and molecules, particularly complex organic molecules, making up comet material. While that first lab GC I saw was closer to the size of Philae, the two GCs in Philae are about the size of shoe boxes.
Philae’s two Gas Chromatographs (GC). Left: COSAC, integrated into Philae, Right: PTOLEMY in an engineering lab. (Credit: ESA)
PTOLEMY. An Evolved Gas Analyzer [ref], a different type of gas chromatograph. The purpose of Ptolemy is to measure the quantities of specific isotopes to derive the isotopic ratios, for example, 2 parts isotope C12 to one part C13. By definition, isotopes of an element have the same number of protons but different numbers of neutrons in their nuclei. One example is the 3 isotopes of Carbon, C12, C13 and C14; the numbers being the number of neutrons. Some isotopes are stable while others can be unstable – radioactive and decay into stable forms of the same element or into other elements. What is of interest to Ptolemy investigators is the ratio of stable isotopes (natural and not those affected by, or that result from, radioactive decay) for the elements H, C, N, O and S, but particularly Carbon. The ratios will be telltale indicators of where and how comets are created. Until now, spectroscopic measurements of comets to determine isotopic ratios have been from a distance and the accuracy has been inadequate for drawing firm conclusions about the origin of comets and how comets are linked to the creation of planets and the evolution of the Solar Nebula, the birthplace of our planetary system surrounding the Sun, our star. An evolved gas analyzer will heat up a sample (~1000 C) to transform the materials into a gaseous state which a spectrometer can very accurately measure quantities. A similar instrument, TEGA (Thermal Evolved Gas Analyzer) was an instrument on Mars Phoenix lander.
SESAMESurface Electrical Sounding and Acoustic Monitoring Experiment This instrument involves three unique detectors. The first is the SESAME/CASSE, the acoustic detector. Each landing foot of Philae has acoustic emitters and receivers. Each of the legs will take turns transmitting acoustic waves (100 Hertz to KiloHertz range) into the comet which the sensors of the other legs will measure. How that wave is attenuated, that is, weakened and transformed, by the cometary material it passes through, can be used along with other cometary properties gained from Philae instruments, to determine daily and seasonal variations in the comet’s structure to a depth of about 2 meters. Also, in a passive (listening) mode, CASSE will monitor sound waves from creaks, groans inside the comet caused potentially by stresses from Solar heating and venting gases.
Next is the SESAME/PP detector – the Permittivity Probe. Permittivity is the measure of the resistance a material has to electric fields. SESAME/PP will deliver an oscillating (sine wave) electric field into the comet. Philae’s feet carry the receivers – electrodes and AC sine generators to emit the electric field. The resistance of the cometary material to about a 2 meter depth is thus measured providing another essential property of the comet – the permittivity.
Philae SESAME/DIM, Dust Impact Monitor. The monitor can measure particle size and velocity. Later as comet P67’s activity rises, it can continue to return total particle flux. (Credit: ESA)
The third detector is called SESAME/DIM. This is the comet dust counter. There were several references used to compile these instrument descriptions. For this instrument, there is, what I would call, a beautiful description which I will simply quote here with reference. “The Dust Impact Monitor (DIM) cube on top of the Lander balcony is a dust sensor with three active orthogonal (50 × 16) mm piezo sensors. From the measurement of the transient peak voltage and half contact duration, velocities and radii of impacting dust particles can be calculated. Particles with radii from about 0.5 µm to 3 mm and velocities from 0.025–0.25 m/s can be measured. If the background noise is very high, or the rate and/or the amplitudes of the burst signal are too high, the system automatically switches to the so called Average Continuous mode; i.e., only the average signal will be obtained, giving a measure of the dust flux.” [ref]
ROMAPRosetta Lander Magnetometer and Plasma detector also includes a third detector, a pressure sensor. Several spacecraft have flown by comets and an intrinsic magnetic field, one created by the comet’s nucleus (the main body) has never been detected. If an intrinsic magnetic field exists, it is likely to be very weak and landing on the surface would be necessary. Finding one would be extraordinary and would turn theories regarding comets on their heads. Low and behold Philae has a fluxgate magnetometer.
Philae ROMAP, Tri-Axial Fluxgate Magnetometer and Plasma Monitor (Credit: ESA/MPS)
The Earth’s magnetic (B) field surrounding us is measured in the 10s of thousands of nano-Teslas (SI unit, billionth of a Tesla). Beyond Earth’s field, the planets, asteroids, and comets are all immersed in the Sun’s magnetic field which, near the Earth, is measured in single digits, 5 to 10 nano-Tesla. Philae’s detector has a range of +/- 2000 nanoTesla; a just in case range but one readily offered by fluxgates. It has a sensitivity of 1/100th of a nanoTesla. So, ESA and Rosetta came prepared. The magnetometer can detect a very minute field if it’s there. Now let’s consider the Plasma detector.
Much of the dynamics of the Universe involves the interaction of plasma – ionized gases (generally missing one or more electrons thus carrying a positive electric charge) with magnetic fields. Comets also involve such interactions and Philae carries a plasma detector to measure the energy, density and direction of electrons and of positively charged ions. Active comets are releasing essentially a neutral gas into space plus small solid (dust) particles. The Sun’s ultraviolet radiation partially ionizes the cometary gas of the comet’s tail, that is, creates a plasma. At some distance from the comet nucleus depending on how hot and dense that plasma is, there is a standoff between the Sun’s magnetic field and the plasma of the tail. The Sun’s B field drapes around the comet’s tail kind of like a white sheet draped over a Halloween trick-or-treater but without eye holes.
The structure of an active comet. In early 2015, 67P/Churyumov–Gerasimenko will wake up. The heat of the Sun will increase gas and dust production which will interact with Solar UV radiation and the Solar Wind. The Sun’s magnetic field will be draped around the coma and tail of the comet. (Photo: ESA)
So at P67’s surface, Philae’s ROMAP/SPM detector, electrostatic analyzers and a Faraday Cup sensor will measure free electrons and ions in the not so empty space. A “cold” plasma surrounds the comet; SPM will detect ion kinetic energy in the range of 40 to 8000 electron-volts (eV) and electrons from 0.35 eV to 4200 eV. Last but not least, ROMAP includes a pressure sensor which can measure very low pressure – a millionth or a billionth or less than the air pressure we enjoy on Earth. A Penning Vacuum gauge is utilized which ionizes the primarily neutral gas near the surface and measures the current that is generated.
Philae will carry 10 instrument suites to the surface of 67P/Churyumov-Gerasimenko but altogether the ten represent 15 different types of detectors. Some are interdependent, that is, in order to derive certain properties, one needs multiple data sets. Landing Philae on the comet surface will provide the means to measure many properties of a comet for the fist time and others with significantly higher accuracy. Altogether, scientists will come closer to understanding the origins of comets and their contribution to the evolution of the Solar System.
Context image showing the location of the primary landing site for Rosetta’s lander Philae. Site J is located on the head of Comet 67P/Churyumov–Gerasimenko. An inset showing a close up of the landing site is also shown. The inset image was taken by Rosetta’s OSIRIS narrow-angle camera on 20 August 2014 from a distance of about 67 km. The image scale is 1.2 metres/pixel. The background image was taken on 16 August from a distance of about 100 km. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
Scientists leading the European Space Agency’s Rosetta mission announced the primary landing site at a media briefing today, Sept. 15, at ESA headquarters.
After weeks of detailed study and debate focused on balancing scientific interest with finding a ‘technically feasible’ and safe Philae touchdown site, the team chose a target dubbed Site J as the primary landing site from among a list of five initially selected sites, said Stephan Ulamec, Philae Lander Manager at the DLR German Aerospace Center, at the briefing.
“Site J is the primary landing site around the head of the comet,” Ulamec announced.
“Site C is the backup site on the body [near the bottom of the comet].”
“This was not an easy task. Site J is a mix of flat areas and rough terrain. It’s not a perfectly flat area. There is still risk with high slope areas.”
Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
He also made clear that there is still some landing uncertainty with the targeting of the lander onto the comet.
Site J is an intriguing region on Comet 67P/Churyumov–Gerasimenko that offers unique scientific potential, with hints of activity nearby, and minimum risk to the lander compared to the other candidate sites, according to ESA.
“As we have seen from recent close-up images, the comet is a beautiful but dramatic world – it is scientifically exciting, but its shape makes it operationally challenging,” says Ulamec.
“None of the candidate landing sites met all of the operational criteria at the 100% level, but Site J is clearly the best solution.”
Philae’s history-making landing on comet 67P is currently scheduled for around Nov. 11, 2014, and will be entirely automatic. The 100 kg lander is equipped with 10 science instruments.
“All of Rosetta’s instruments are supporting the landing site selection,” said Holger Sierks, principal investigator for Rosetta’s OSIRIS camera from the Max Planck Institute for Solar System Research in Gottingen, Germany.
“Site J is just 500-600 meters away from some pits and an area of comet outgassing activity. They will become more active as we get closer to the sun.
The team is in a race against time to select a suitable landing zone quickly and develop the complex landing sequence since the comet warms up and the surface becomes ever more active as it swings in closer to the sun and makes the landing ever more hazardous.
Since the descent to the comet is passive it is only possible to predict that the landing point will place within a ‘landing ellipse’ typically a few hundred metres in size, the team elaborated.
The three-legged lander will fire two harpoons and use ice screws to anchor itself to the 4 kilometer (2.5 mile) wide comet’s surface. Philae will collect stereo and panoramic images and also drill 20 to 30 centimeters into and sample its incredibly varied surface.
“We will make the first ever in situ analysis of a comet at this site, giving us an unparalleled insight into the composition, structure and evolution of a comet,” says Jean-Pierre Bibring, a lead lander scientist and principal investigator of the CIVA instrument at the IAS in Orsay, France.
“Site J in particular offers us the chance to analyse pristine material, characterise the properties of the nucleus, and study the processes that drive its activity.”
“It’s amazing how much we have learned so far.”
“We are in a true revolution of how we think Planets form and evolve,” Bibring elaborated at the briefing.
“We will make many types of scientific measurements of the comet from the surface. We will get a complete panoramic view of the comet on the macroscopic and microscopic scale.”
Rosetta is currently orbiting the comet from a distance of 30 km, said ESA Rosetta flight director Andrea Accomazzo. He said it will likely go even closer to 20 km and perhaps 10 km.
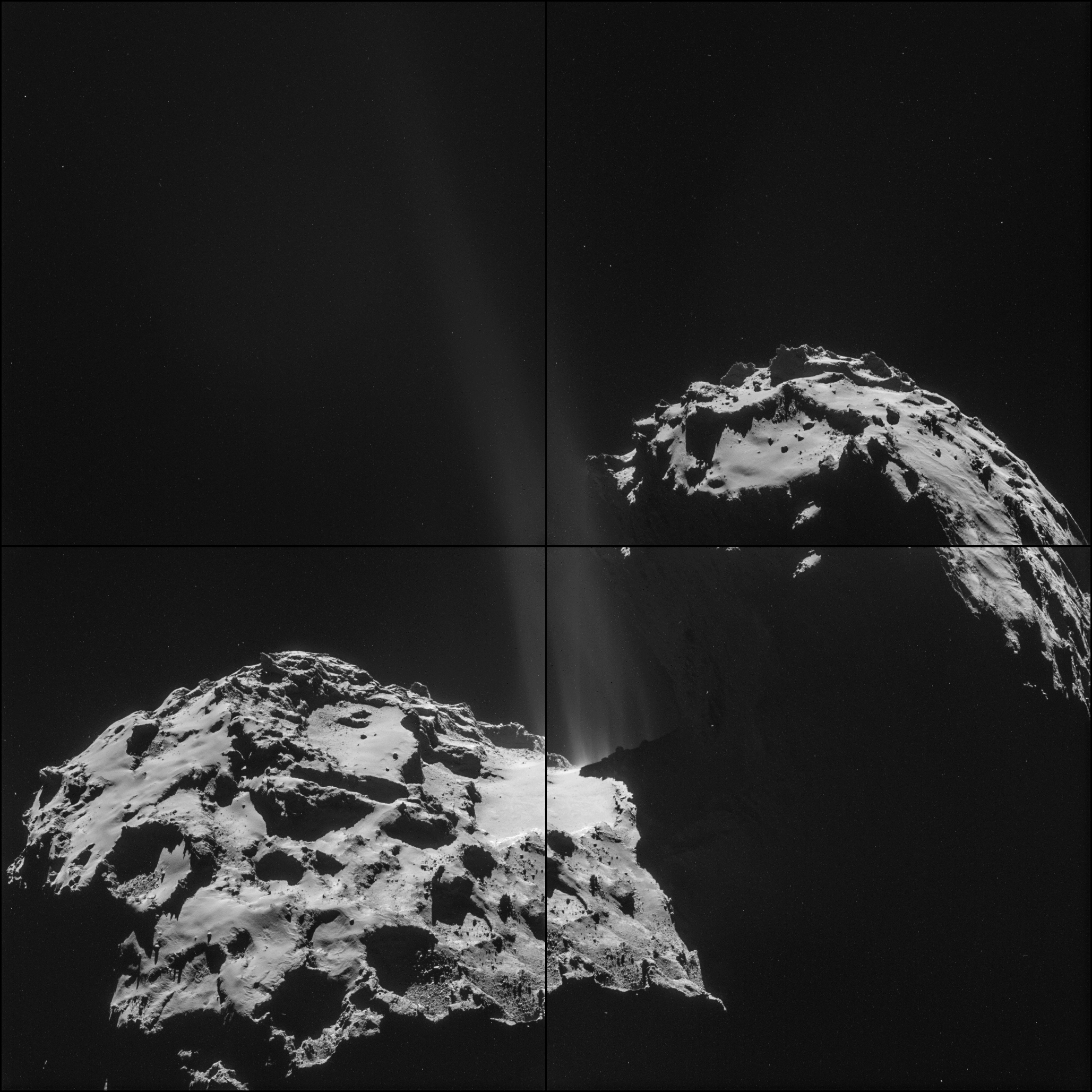
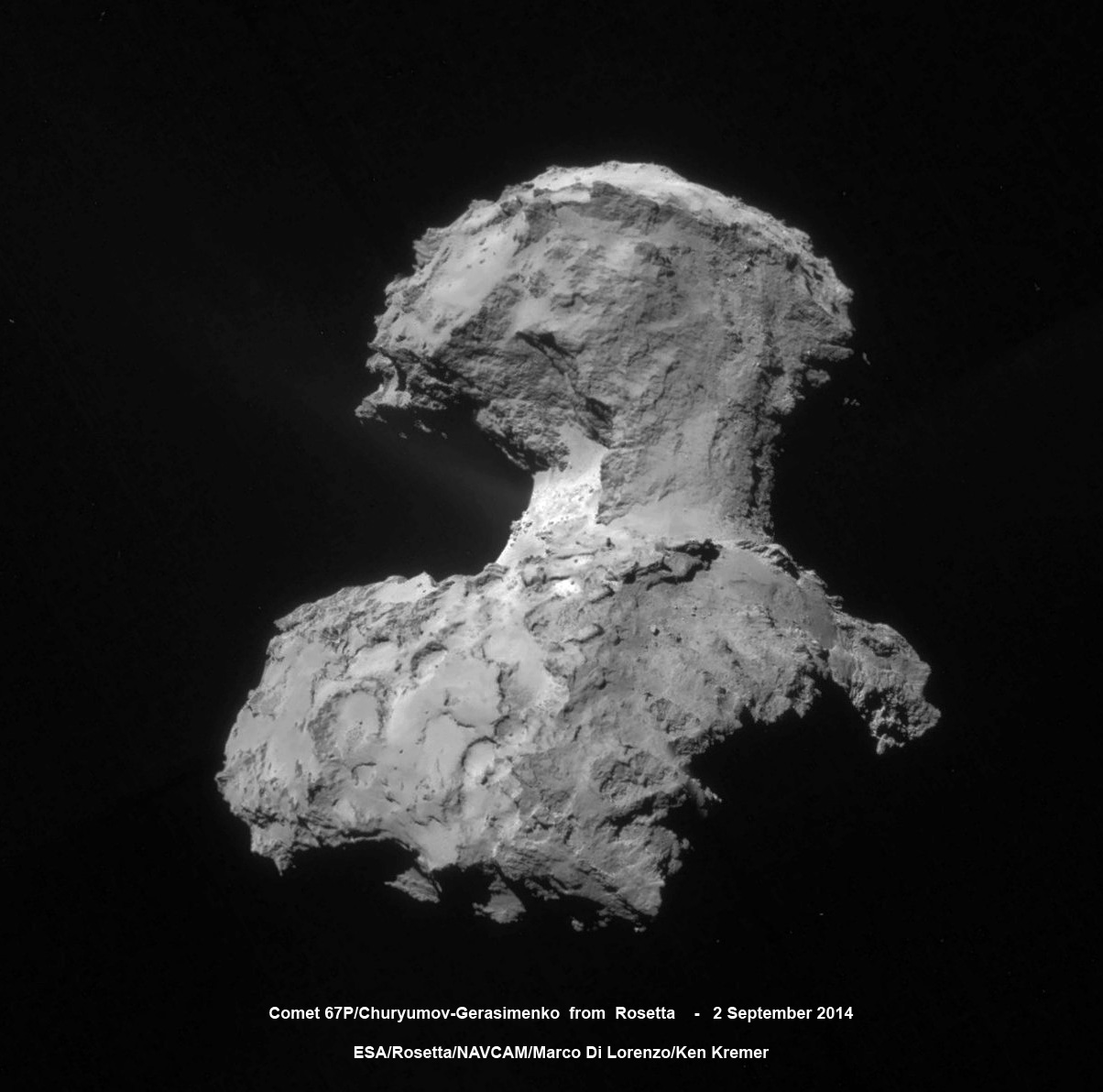
Four-image photo mosaic comprising images taken by Rosetta’s navigation camera on 2 September 2014 from a distance of 56 km from comet 67P/Churyumov-Gerasimenko. The mosaic has been contrast enhanced to bring out details of the coma, especially of jets of dust emanating from the neck region. Credits: ESA/Rosetta/NAVCAM/Marco Di Lorenzo/Ken Kremer – kenkremer.com
“Now that we’re closer to the comet, continued science and mapping operations will help us improve the analysis of the primary and backup landing sites,” says ESA Rosetta flight director Andrea Accomazzo.
“Of course, we cannot predict the activity of the comet between now and landing, and on landing day itself. A sudden increase in activity could affect the position of Rosetta in its orbit at the moment of deployment and in turn the exact location where Philae will land, and that’s what makes this a risky operation.”
Four-image photo mosaic comprising images taken by Rosetta’s navigation camera on 31 August 2014 from a distance of 61 km from comet 67P/Churyumov-Gerasimenko. The mosaic has been rotated and contrast enhanced to bring out details. The comet nucleus is about 4 km across. Credits: ESA/Rosetta/NAVCAM/Ken Kremer/Marco Di Lorenzo
The final landing site selections were made at a meeting being held this weekend on 13 and 14 September 2014 between the Rosetta Lander Team and the Rosetta orbiter team at CNES in Toulouse, France.
“No one has ever attempted to land on a comet before, so it is a real challenge,” says Fred Jansen, ESA Rosetta mission manager.
“The complicated ‘double’ structure of the comet has had a considerable impact on the overall risks related to landing, but they are risks worth taking to have the chance of making the first ever soft landing on a comet.”
Five candidate sites were identified on Comet 67P/Churyumov-Gerasimenko for Rosetta’s Philae lander. The approximate locations of the five regions are marked on these OSIRIS narrow-angle camera images taken on 16 August 2014 from a distance of about 100 km. Enlarged insets below highlight 5 landing zones. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Processing: Marco Di Lorenzo/Ken Kremer
Stay tuned here for Ken’s continuing Rosetta, Earth and Planetary science and human spaceflight news.