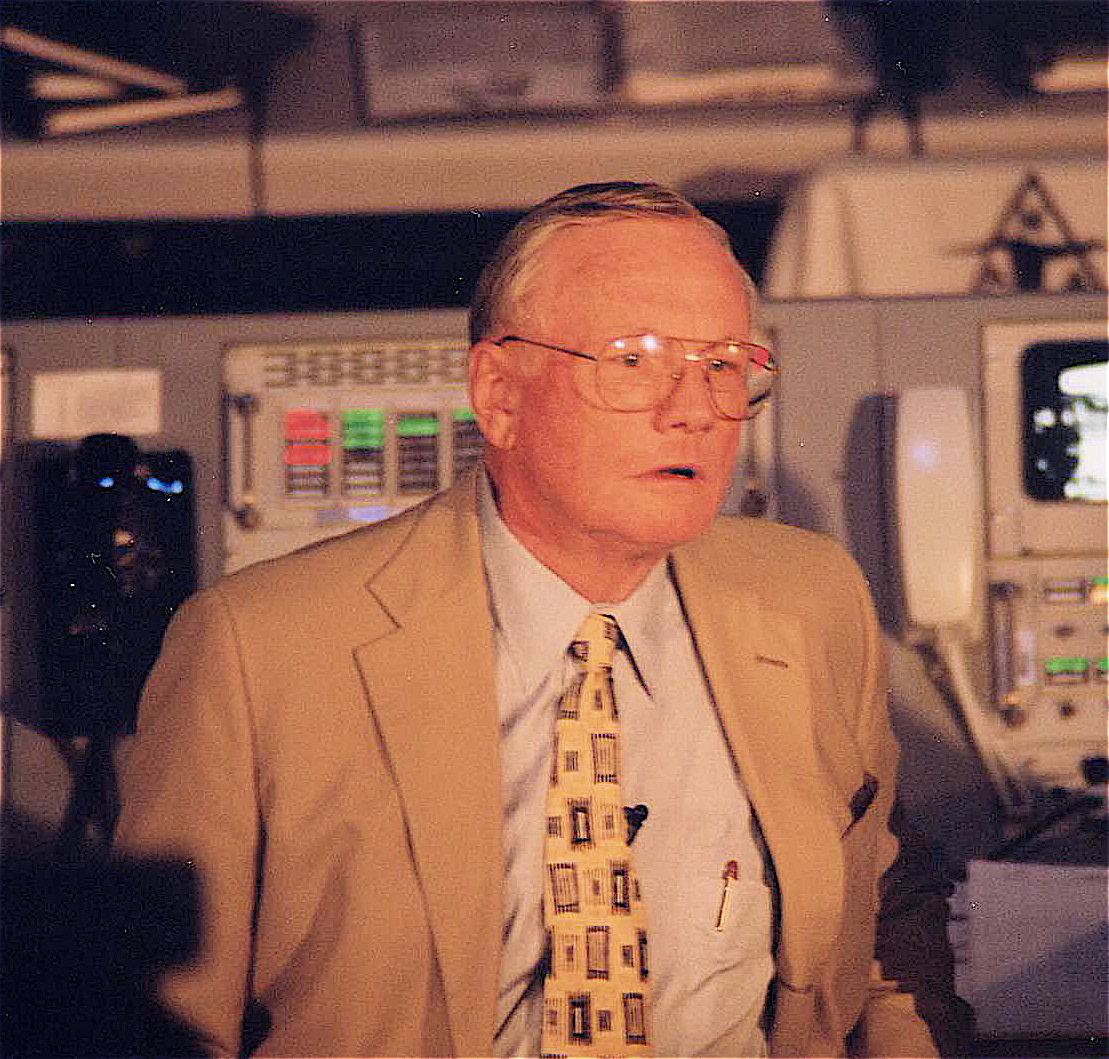
Image Caption: Neil Armstrong at the Kennedy Space Center (KSC) Saturn V Exhibit (Control Room) for the 30th Anniversary of Apollo 11 on July 16, 1999. Credit: John Salsbury
In tribute to Neil Armstrong, first human to grace another world here’s a new gallery of unpublished photos to enjoy as shared by my good friend – space photographer John Salsbury.
Armstrong was the first person to walk on the Moon as the commander of NASA’s Apollo 11 flight in 1969. Neil passed away on August 25, 2012 at age 82.
Salsbury writes, “I was fortunate enough to be at the KSC Saturn Exhibit for this photo op of the 30th Anniversary of Apollo 11 on July 16, 1999. These photos were the best I could get using my Minolta XGM 135 mm and Kodak 1000 with no flash.”
On Friday August 31, a private memorial service was held in Cincinnati, Ohio (photos below) to pay tribute to Neil Armstrong. Numerous dignitaries attended the service including his two surviving crewmates Buzz Aldrin and Michael Collins

Image Caption: Neil Armstrong Memorial. A memorial tribute from the Smithsonian is seen at the entrance of a private memorial service celebrating the life of Neil Armstrong, Aug. 31, 2012, at the Camargo Club in Cincinnati. Armstrong, the first man to walk on the moon during the 1969 Apollo 11 mission, died Saturday, Aug. 25. He was 82. Photo Credit: (NASA/Bill Ingalls)
NASA released this statement from NASA Administrator Charles Bolden
“Today, we pay tribute to a pioneering American; an explorer, a patriot and an individual who, with ‘one small step,’ achieved an impossible dream. Family, friends and colleagues of Neil’s gathered to reflect on his extraordinary life and career, and offer thanks for the many blessings he shared with us along the way.
His remarkable achievements will be forever remembered, and his grace and humility will always be admired. As we take the next giant leap forward in human exploration of our vast universe, we stand on the shoulders of this brave, reluctant hero. Neil Armstrong’s first step on the moon paved the way for others to be the ‘first’ to step foot on another planet. We have an obligation to carry on this uniquely American legacy.
A grateful nation offers praise and salutes a humble servant who answered the call and dared to dream.”
Read my earlier story about the passing of Neil Armstrong; icon for the ages and hero to all who dare mighty deeds – here
See more photos from the Neil Armstrong Memorial service in Ohio held on Aug. 31 – here

Image Caption: Neil Armstrong at the Kennedy Space Center (KSC) Saturn V Exhibit for the 30th Anniversary of Apollo 11. Credit: John Salsbury

Image Caption: Apollo astronauts Neil Armstrong, Buzz Aldrin, Gene Cernan,& Walt Cunningham gather at KSC for the 30th Anniversary of Apollo 11 – Saturn 5 Exhibit Control Room on July 16, 1999. Credit: John Salsbury

Image Caption: Apollo astronauts Neil Armstrong, Buzz Aldrin, Gene Cernan,& Walt Cunningham gather at KSC for the 30th Anniversary of Apollo 11 – Saturn 5 Exhibit Control Room on July 16, 1999. Credit: John Salsbury

Image Caption: Apollo astronauts Neil Armstrong, Buzz Aldrin, Gene Cernan,& Walt Cunningham gather at KSC for the 30th Anniversary of Apollo 11 – Saturn 5 Exhibit Control Room on July 16, 1999. NASA Launch Commentator Lisa Malone holding mike. Credit: John Salsbury

Image Caption: Apollo 11 Astronauts Michael Collins, left, and Buzz Aldrin talk at a private memorial service celebrating the life of Neil Armstrong, Aug. 31, 2012, at the Camargo Club in Cincinnati. Armstrong, the first man to walk on the moon during the 1969 Apollo 11 mission, died Saturday, Aug. 25. He was 82. Credit: NASA/Bill Ingalls

Image Caption: Neil Armstrong Memorial – Members of the U.S. Navy Ceremonial Guard from Washington, D.C., present the Colors during a memorial service celebrating the life of Neil Armstrong, Friday, Aug. 31, 2012, in Cincinnati. Armstrong, the first man to walk on the moon during the 1969 Apollo 11 mission, died Saturday, Aug. 25. He was 82. Photo Credit: (NASA/Bill Ingalls)