A circumstellar disk of debris around a matured stellar system may indicate that Earth-like planets lie within. LUVOIR will be able to see inside the disk to watch planets forming.
Credit: NASA
[/caption]
Recent modeling of Sun-like stars with planetary systems, found that a system with four rocky planets and four gas giants in stable orbits – and only a sparsely populated outer belt of planetesimals – has only a 15 to 25% likelihood of developing. While you might be skeptical about the validity of a model that puts our best known planetary system in the unlikely basket, there may be some truth in this finding.
This modeling has been informed by the current database of known exoplanets and otherwise based on some prima facie reasonable assumptions. Firstly, it is assumed that gas giants are unable to form within the frost line of a system – a line beyond which hydrogen compounds, like water, methane and ammonia would exist as ice. For our Solar System, this line is about 2.7 astronomical units from the Sun – which is roughly in the middle of the asteroid belt.
Gas giants are thought to only be able to form this far out as their formation requires a large volume of solid material (in the form of ices) which then become the cores of the gas giants. While there may be just as much rocky material like iron, nickel and silicon outside the frost line, these materials are not abundant enough to play a significant role in forming giant planets and any planetesimals they may form are either gobbled up by the giants or flung out of orbit.
However, within the frost line, rocky materials are the dominant basis for planet forming – since most light gas is blown out of the region by force of the stellar wind and other light compounds (such as H2O and CO2) are only sustained by accretion within forming planetesimals of heavier materials (such as iron, nickel and silicates). Appreciably-sized rocky planets would probably form in these regions within 10-100 million years after the star’s birth.
So, perhaps a little parochially, it is assumed that you start with a system of three regions – an inner terrestrial planet forming region, a gas giant forming region and an outer region of unbound planetesimals, where the star’s gravity is not sufficient to draw material in to engage in further accretion.
From this base, Raymond et al ran a set of 152 variations, from which a number of broad rules emerged. Firstly, it seems that the likelihood of sustaining terrestrial inner planets is very dependent on the stability of the gas giants’ orbits. Frequently, gravitational perturbations amongst the gas giants results in them adopting more eccentric elliptical orbits which then clears out all the terrestrial planets – or sends them crashing into the star. Only 40% of systems retained more than one terrestrial planet, 20% had just one and 40% had lost them all.
The Moon has retained a comprehensive record of the Late Heavy Bombardment from 4.1 to 3.8 billion years ago - resulting from a reconfiguration of the gas giants. As well as clearing out much of debris disk of the early Solar System, this reconfiguration flung material into the inner solar system to bombard the rocky planets.
Debris disks of hot and cold dust were found to be common phenomena in matured systems which did retain terrestrial planets. In all systems, primal dust is largely cleared out within the first few hundred million years – by radiation or by planets. But, where terrestrial planets are retained, there is a replenishment of this dust – presumably via collisional grinding of rocky planetesimals.
This finding is reflected in the paper’s title Debris disks as signposts of terrestrial planet formation. If this modeling work is an accurate reflection of reality, then debris disks are common in systems with stable gas giants – and hence persisting terrestrial planets – but are absent from systems with highly eccentric gas giant orbits, where the terrestrial planets have been cleared out.
Nonetheless, the Solar System appears as unusual in this schema. It is proposed that perturbations within our gas giants’ orbits, leading to the Late Heavy Bombardment, were indeed late with respect to how other systems usually behave. This has left us with an unusually high number of terrestrial planets which had formed before the gas giant reconfiguration began. And the lateness of the event, after all the collisions which built the terrestrial planets were finished, cleared out most of the debris disk that might have been there – apart from that faint hint of Zodiacal light that you might notice in a dark sky after sunset or before dawn.
Celebrate Yuri’s Night on April 12, 2011 -- 50th Anniversary of Human Spaceflight
On April 12, 1961, Russian cosmonaut Yuri Gagarin (left, on the way to the launch pad) became the first human in space, making a 108-minute orbital flight in his Vostok 1 spacecraft.
Newspapers like The Huntsville Times (right) trumpeted Gagarin's accomplishment.
Credit: NASA
Send Ken your Yuri’s Night event reports and photos
Mark your calendars. April 12, 2011 marks the 50th Anniversary of Human Spaceflight and Cosmonaut Yuri Gagarin’s astonishing First Orbit of our precious planet Earth on April 12, 1961. Gagarin was the first human to enter outer space and see what no one else had ever witnessed – our commonly shared Earth as a planet and beautiful blue globe with no borders.
Space enthusiasts worldwide are celebrating this watershed moment in Human history at a network of over 400 “Yuri’s Night” parties taking place in more than 70 countries on 6 continents and 2 worlds, according to the official “Yuri’s Night” website.
Gagarin’s flight took place in the midst of the inflammatory Cold War rivalry between the Soviet Union and the United States and shocked the world into new realities. The Space Race led to the first lunar landing by the United States and Neil Armstrong’s first steps on the moons surface in 1969. Eventually, the world’s superpowers beat swords into plowshares and united their efforts to build the International Space Station.
Yuri Gagarin - first human in space. Credit: Russian ArchivesYuri Gagarin was the first person to boldly leave the bonds of Earth’s gravity and thus became the first “Spaceman”. Gagarin blasted off inside the bell-shaped Vostok 1 spaceship from the launch pad at Baikonur at 9:07 a.m, Moscow time (607 UTC) to begin the era of human spaceflight.
Gagarin flew around the Earth in a single orbit at an altitude of 302 kilometers (187 miles). The flight lasted 108 minutes and safely ended when he descended back and parachuted to the ground, just north of the Caspian Sea. At the age of 27, Gagarin was instantly transformed into a worldwide hero. After the momentous flight he soon embarked on an international tour.
20 years later on April 12, 1981, NASA’s first space shuttle blasted off on the STS-1 mission on a daring test flight with astronauts John Young and Bob Crippen strapped inside Space Shuttle Columbia.
Russian postcard featuring Yuri Gagarin
The first “Yuri’s Night – World Space Party” was held on April 12, 2001 to commemorate the 40th anniversary of Gagarin’s spaceflight. Over 10,000 people attended 64 events located worldwide. The goal was to inspire people, increase awareness and support for space exploration across the globe and foster the spread of new ideas to broaden our access to space.
“Yuri’s Night” has been growing in popularity every year. Events range in size from a few folks to numbers in the thousands. Attendees range from astronauts and cosmonauts, NASA and global space agency officials and reps, scientists and engineers, famous actors, playwrights, writers, artists, athletes and musicians to just everyday folks and kids of all ages and backgrounds. Everyone can get involved.
Yuri Gagarin in orbitIn honor of the 50th anniversary of Gagarin’s flight, documentary film maker Christopher Riley conceived and created a film titled “First Orbit” to try and show the approximate view of Earth that Gagarin actually saw. There is only scant footage of Gagarin’s actual flight and he himself took no pictures of the Earth from orbit.
“First Orbit” recreates much of the view of the Earth’s surface that Gagarin would have seen fifty years ago. Mostly he flew over the world oceans as well as the Soviet Union and Africa.
Riley collaborated with the astronauts aboard the International Space Station, chiefly Paolo Nespoli of ESA, who took film footage from the new 7 windowed Cupola as the station matched the actual flight path of Gagarin and Vostok 1 as closely as possible. The free film celebrates 50 years of human spaceflight.
“First Orbit” premiers worldwide on YouTube in a special global streaming event for Yuri’s Night on April 12 . Watch the short trailer below, with original and stirring music by Philip Sheppard.
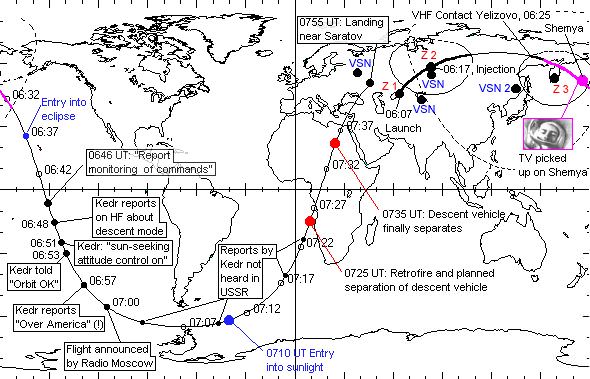
Orbital flight path of Yuri Gagarin and Vostok 1 on April 12, 1961
Gagarin’s call sign was Cedar or Kder - which means Siberian Pine in Russian. Map courtesy of Sven Grahn
It’s easy and free to register your local party at the Yuri’s Night event website. There is still time to register your Yuri’s Night party – Indeed the list has grown as I typed out this story !
Send Ken your “Yuri’s Night” event photos/short report to post in a round up story at Universe Today about the global festivities celebrating the historic achievement of Yuri Gagarin. Email kremerken at yahoo dot com
First Orbit Trailer II
Russian built Mini Research Module MRM-1 launched aboard US Space Shuttle Atlantis in May 2010.
Shuttle Atlantis delivered MRM-1 (known as Rassvet) to the International Space Station.
MRM-1 undergoes final prelaunch processing inside clean room at Astrotech Space Operations Facility in Florida. Docking port to ISS is protected by red colored covering. Equipment airlock for experiments at top. Russian Flag mounted at left.
Rassvet underscores the cooperation that exists today, in stark contrast to their rivalry during the Cold War. Russia, the United States, Europe, Japan and Canada have now united their space exploration efforts to build the International Space Station. The worlds space powers cooperate in other space exploration projects today as well that venture to the Moon, Mars and beyond to Deep Space. Credit: Ken Kremer
Curiosity Mars Rover almost complete at NASA’s Jet Propulsion Laboratory – Side View. The rover for NASA's Mars Science Laboratory mission, named Curiosity, is about 3 meters (10 feet) long, not counting the additional length that the rover's arm can be extended forward. The front of the rover is on the left in this side view. The arm is partially raised but not extended. Rising from the rover deck just behind the front wheels is the remote sensing mast. Credit: NASA/JPL-Caltech
[/caption]
NASA’s massive ‘Curiosity’ rover is almost ready to begin the first leg of its long trek to the surface of the Red Planet. Engineers at NASA’s Jet Propulsion Laboratory in California are nearly finished with assembling and testing all the components of the Mars Science Laboratory (MSL) mission (see photos above and below).
The MSL team plans to ship Curiosity as well as the cruise stage, descent stage and back shell to the Kennedy Space Center (KSC) in May and June. After arriving at KSC, all the pieces will be integrated together and tested during final assembly in a clean room. The rover will then be installed inside a 5 meter diameter nose cone, shipped the short distance to Cape Canaveral and then bolted atop an Atlas Vrocket (photo below).
Top of Mars Rover Curiosity's Remote Sensing Mast.
The remote sensing mast on NASA Mars rover Curiosity holds two science instruments for studying the rover's surroundings and two stereo navigation cameras for use in driving the rover and planning rover activities. Credit: NASA/JPL-Caltech
The launch window for Curiosity extends from Nov. 25 to Dec. 18, 2011. The first stage of the powerfulAtlas V rocket will be augmented with four solid rocket boosters. The Atlas V has previously launched two planetary missions; the Mars Reconnaissance Orbiter (MRO) and the New Horizons mission to Pluto.
Take a long gander at the 3 meter long rover because its appearance is now very much how it will look while it’s roving along intriguing martian landscapes for at least two earth years after landing in August 2012.
NASA Mars Rover Curiosity at JPL, View from Front Left Corner.
Support equipment is holding the Mars rover Curiosity slightly off the floor. When the wheels are on the ground, the top of the rover's mast is about 2.2 meters (7 feet) above ground level. Credit: NASA/JPL-Caltech
The goal is to search for clues to environmental conditions favorable for microbial life and for preserving evidence about whether Martian life ever existed in the past or today. NASA is scrutinizing a list of four potential landing sites for the best chance of finding a habitable zone.
Arm and Mast of Curiosity Mars Rover.
Curiosity's arm and remote sensing mast carry science instruments and other tools for the mission. This image, taken April 4, 2011, inside the Spacecraft Assembly Facility at JPL shows the arm on the left and the mast just right of center. Credit: NASA/JPL-CaltechAtlas V rocket at pad 41 at Cape Canaveral Air Force Station.
An Atlas V rocket similar to this one with a 5 meter diameter nose cone – but with 4 solid rocket boosters added - will launch Curiosity to Mars in late 2011. Credit: Ken KremerAtlas V launch vehicle will blast Curiosity to Mars
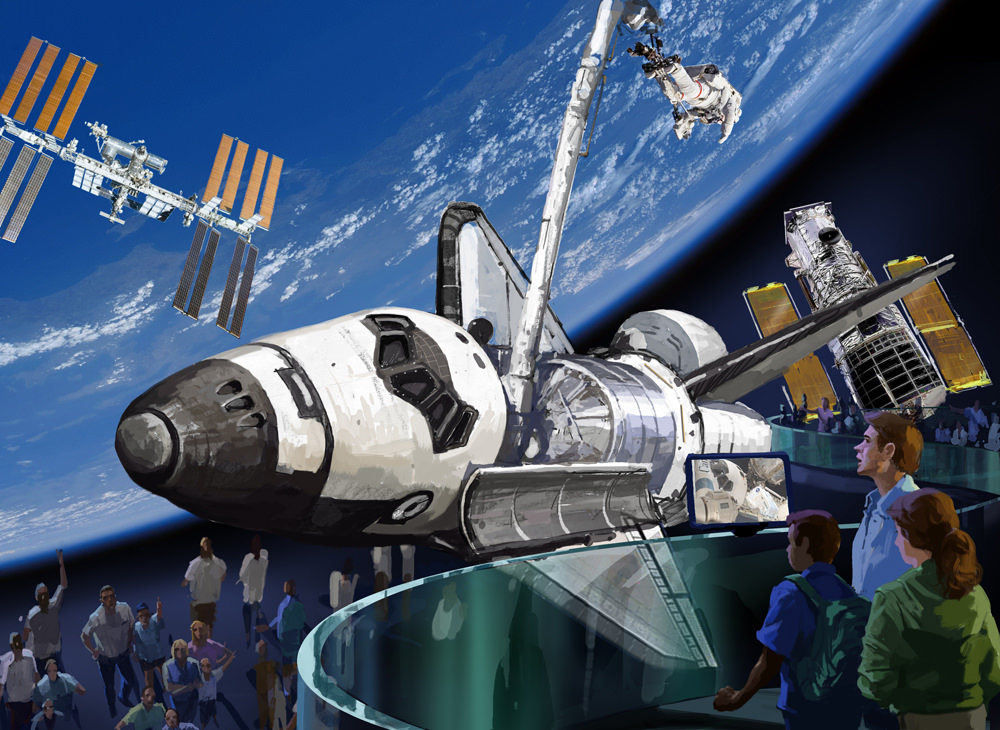
Shuttle orbiter would be displayed like In Flight at Kennedy Space Center Visitor Complex. Credit: KSC Visitor Complex
[/caption]
‘In Flight’ …. That’s the heart of the dramatic plan to showcase a Space Shuttle Orbiter being proposed by the Kennedy Space Center Visitor Complex (KSCVC) as they seek to win the heated competition to become the permanent new home to one of NASA’s three soon to be retiredOrbiters.
Honoring the past, embracing the future of human spaceflight and celebrating the spirit of human determination; this is the new theme planned by the Visitor Complex at Kennedy so that guests of all ages will feel like they are embarking on an interactive space expedition. See the ‘In Flight’ graphic illustration above.
Some 21 science centers and museums across the US are bidding for the once in a lifetime chance to house NASA’s surviving shuttle orbiters; Discovery, Atlantis and Endeavour.
“The Kennedy Space Center is the home of the Space Shuttle unlike all the other places,” said Bill Moore, Chief Operating Officer of KSCVC. I spoke to Moore at KSC in an exclusive interview for Universe Today.
“All of the shuttle missions have launched from here, not anywhere else. So Kennedy is their home. And they all eventually come back here at the end of each mission. So we have a compelling story to tell about their history at KSC and the future.”
Shuttle Endeavour and the White Room
Shuttle orbiter display at the Kennedy Space Center Visitor Complex will include many shuttle artifacts, including the White Room - shown here attached to shuttle Endeavour. Astronauts walk
through the white room to enter the shuttle crew cabin. Credit: Ken Kremer
The Smithsonian National Air & Space Museum, Washington, D.C., has long been expected to be picked as the retirement home for Space Shuttle Discovery, the oldest orbiter. That leaves Atlantis and Endeavour remaining in the bidding war. Since the Smithsonian currently displays the shuttle Enterprise, that unflown orbiter would also be up for grabs by another venue.
NASA Administrator Charles Bolden will decide the final site selections. He is scheduled to announce the winner of the nationwide competition on April 12, which is the 30th anniversary of the first shuttle flight (STS-1) by Columbia on April, 12, 1981.
Another location that plays a pivoital role in the U.S. space program is NASA’s Johnson Space Center in Houston, Texas, home to Mission Control. Johnson Space Center is also home base for the shuttle astronauts and houses the facilities where they train for space missions. The Johnson Visitor Center – Space Center Houston – has proposed a 53,000 square foot pavilion with interactive exhibits.
The proposed new 53,000-square-foot space shuttle exhibit located at the Visitor Center at the NASA Johnson Space Center in Houston will be an interactive, educational experience that encourages student interest and commitment to science, technology, engineering and math (STEM) education. NASA’s Johnson Space Center plays a vital role in the US Space program. Johnson is home to Mission Control, the shuttle astronauts and the astronauts training base. Credit: Space Center Houston
Many of those who work on space projects feel strongly that two of the orbiters should unquestionably be awarded to the Kennedy Space Center (KSC) and the Johnson Space Center JSC) since these are the two locations most intimately involved with the Space Shuttle program. All the crews were trained at JSC and blasted off to space from KSC.
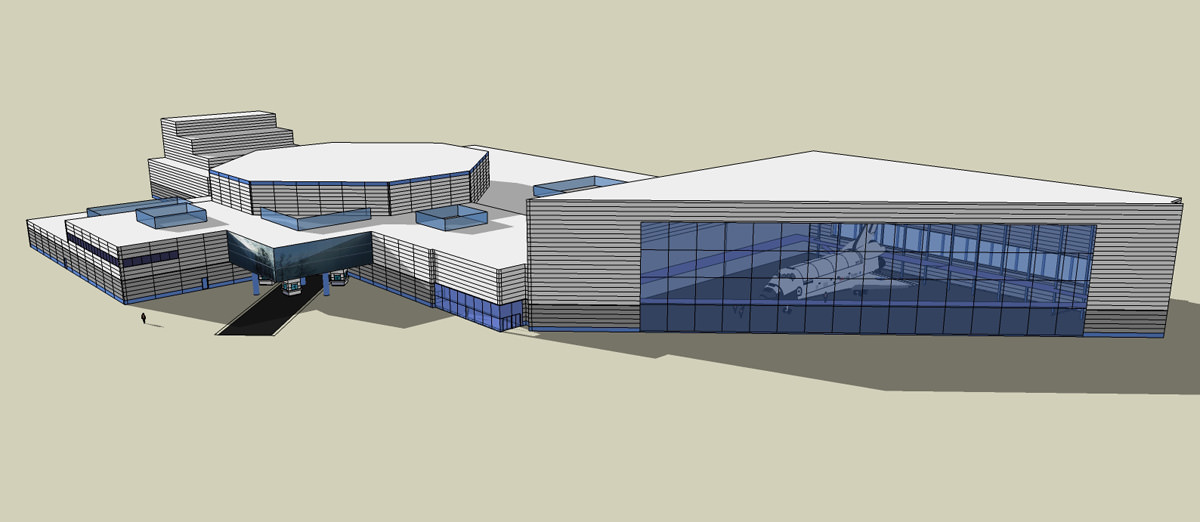
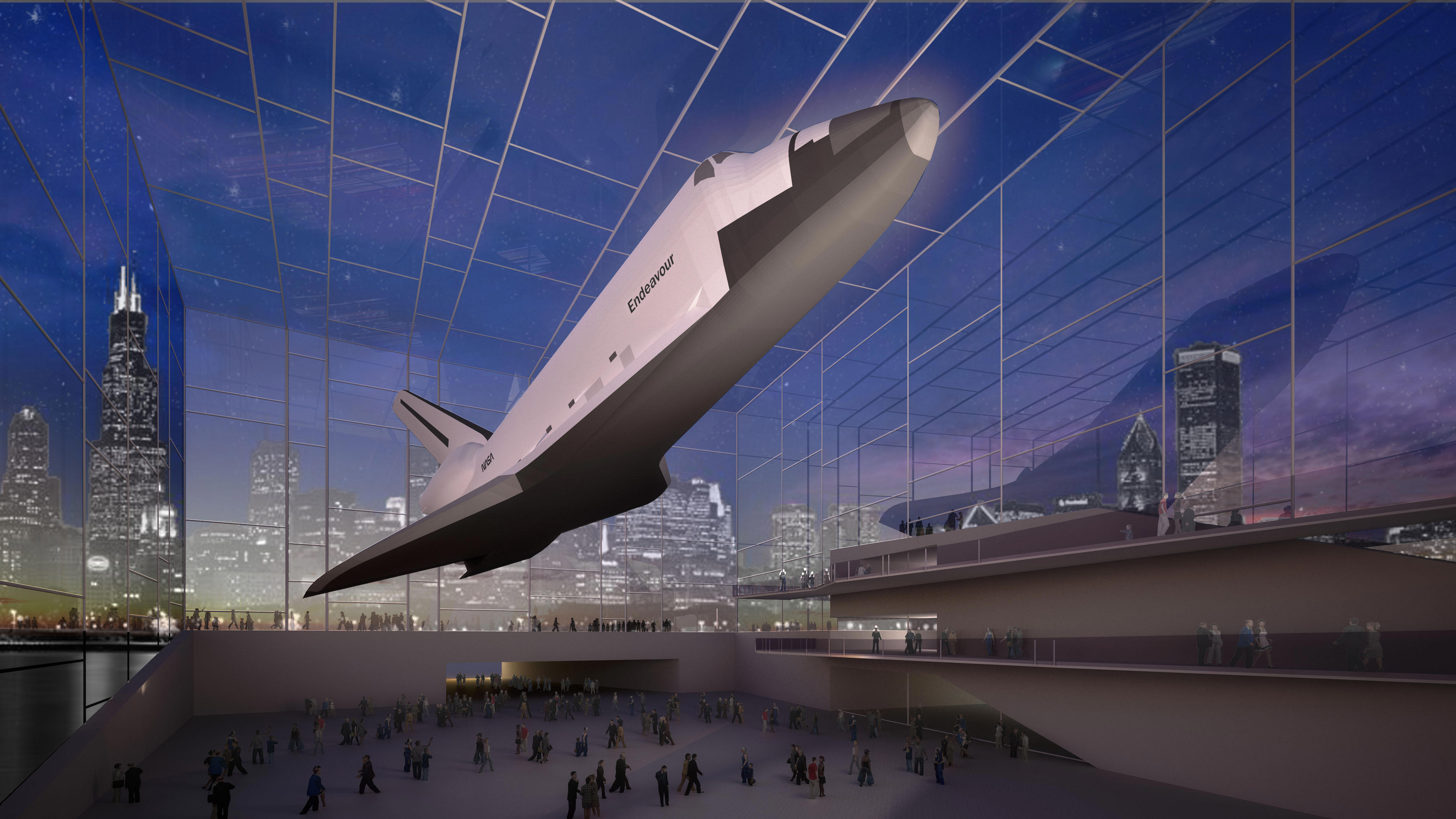
Among the other contenders in the running to house an orbiter are; the Intrepid Sea-Air-Space Museum in New York City; the Adler Planetarium in Chicago; the National Museum of the Air Force in Dayton, Ohio; the U.S. Space & Rocket Center in Huntsville, Alabama; the Museum of Flight in Seattle.
The Adler envisions a dynamic exhibition of the Space Shuttle Orbiter in which visitors will have an opportunity to get up close to this national treasure. Proposed exhibition elements including a simulator will help families experience space exploration first-hand. Credit: Adler Planetarium
At the Kennedy Visitor Complex, a brand new 64,000 square-foot hall would be constructed to display the orbiter “In Flight”. The exhibit would engage viewers in an up close experience to see how the vehicle actually worked in space and also feature its major accomplishments; such as building the International Space Station (ISS) and upgrading the Hubble Space Telescope.
The orbiter home is projected to cost some $100 million and would be the marquee element of the master plan entailing a transformative overhaul of the entire visitor complex at Kennedy, according to Moore.
The KSCVC concept is outlined in a thick book with extensively detailed story boards and drawings. Clearly, a lot of hard work and thought has gone into designing KSCVC’s proposal to house an orbiter and integrate it with a complete renovation and update of the spaceport tour facilities. The goal is to satisfy the interests of the whole family- not just hard core space geeks.
“We (KSCVC) will display the orbiter tilted, like it is flying in space and at work. Because that’s the way people think about the orbiter – working in space. Not sitting on the ground on three wheels,” Moore explained to me.
“So, our job at KSC is to show the shuttle’s working time as it is flying in space. The payload bay doors will be open and the robotic arm will be extended. Some type of cargo will be inside. We will also show the Hubble and the ISS with models, giant video screens and murals, because we think that’s key to understanding the role of the shuttle.”
Tilted Endeavour 'In Flight'
This tilted view of Space Shuttle Endeavour ‘In Flight’ may give an impression of what visitors might experience in the shuttle orbiter exhibit planned by the Kennedy Space Center Visitor Complex if they are selected as a permanent home for the retired vehicle. I snapped this photo inside the Vehicle Assembly Building while Endeavour was vertically tilted and being hoisted by cables in mid-air. The photo has been rotated 90 degrees to look as though it were horizontal. Credit: Ken Kremer
Moore told me that this will be the largest building ever constructed at KSCVC, even bigger than the popular Shuttle Launch Experience completed a few years back.
“When people come into the exhibit, their first view will be to see the orbiter as though someone would see it by looking out from the ISS, up against a gorgeous backdrop of the Earth, the Sky and the Universe.”
“The point is to make you believe that you are actually seeing the orbiter in space. Visitors will be able to view the orbiter from many different angles,” said Moore.
The shuttle will be shown as it really looks and is flown with the heat shield tiles, with all its scorch marks, pits, scars and imperfections.
“We do not want the orbiter to be polished to a pristine state,” Moore stated firmly.
“We want to expose as many people as possible from around the world to this wonderful vehicle and to what’s happened up there in space.”
“The vehicle is just part of the story. The story is much bigger.
Historic Final Landing of Space Shuttle Discovery
Space Shuttle Discovery concluded her magnificent final journey with a safe landing on March 9, 2011 at the Kennedy Space Center in Florida. Discovery is the first shuttle to be retired and will likely be housed at the Smithsonian National Air and Space Museum in Washington, DC. Credit: Ken Kremer
“The purpose of the display building is that we want to show the whole story of what the shuttle has done and all the major milestones. The people who processed and cared for the orbiters are also part of the story,” Moore amplified.
“We will remember and show the story of those who made the ultimate sacrifice, what we learned from the accidents and then fixed lots of issues to get to a better flight system.”
I asked Moore, when will the exhibit open ? “I would like to open the exhibit by mid to late 2013,” he replied.
The orbiter will be showcased with components from the shuttle’s history. “We have the beanie cap, the white room and a fairly large collection of many other artifacts, parts and items beyond just the orbiter that will be used to tell the story of the shuttle program.”
“The shuttle story covers 30 remarkable years,” said Moore.
Only two flights remain until the shuttles are forcibly retired for lack of many and some say willpower to continue exploring.
The final flight of Endeavour on the STS-134 mission is set for April 19. Atlantis is honored with the shuttle programs very last mission, STS-135, slated for late June 2011.
Discovery just landed on her historic final mission on March 9 – a thrilling and bittersweet experience for all who work and report on the shuttle program. Discovery is being decommissioned and now belongs to history although she has a lot of life left in her.
Stay tuned for the April 12 announcement of the Orbiter homes selected.
Space Shuttle Atlantis at Pad 39 A at the Kennedy Space Center.
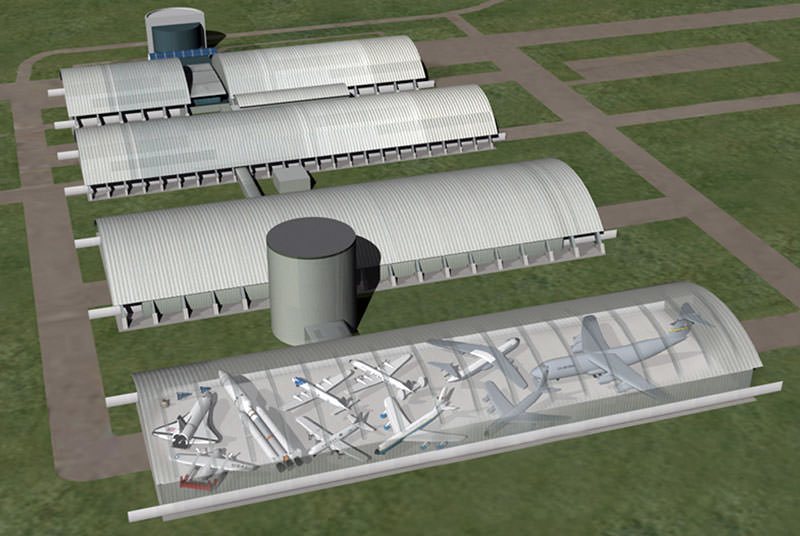
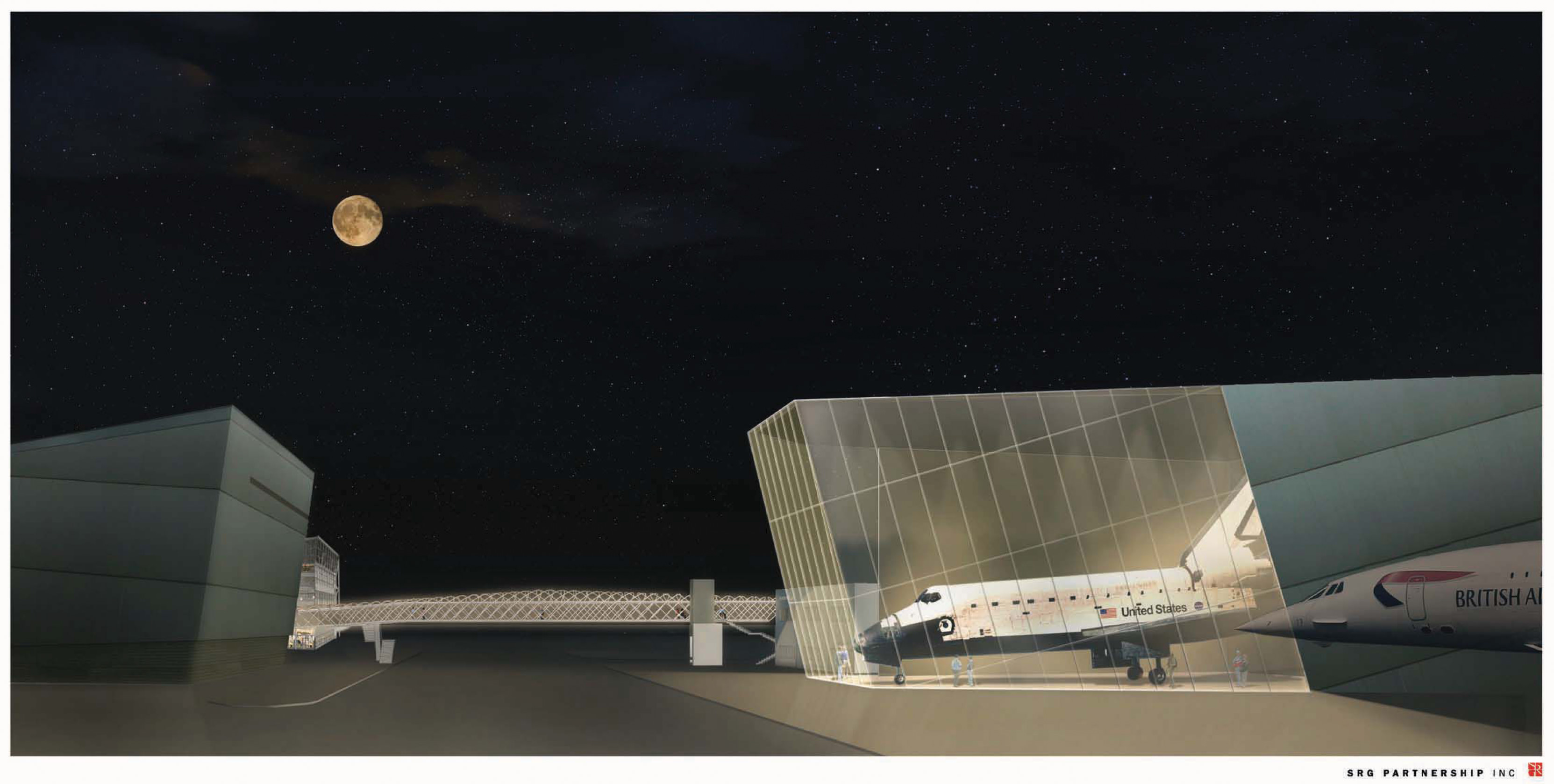
Atlantis will blast off on the final mission of the shuttle era in late June 2011. Credit: Ken KremerSpace Shuttle at Intrepid. The Intrepid states it has plenty of room at Pier 86 to house a space shuttle. The shuttle would be displayed in a dedicated building with plenty of viewing platforms to give guests an up close look into one of these orbiters. Credit: Intrepid MuseumThe National Museum of the United States Air Force is in the midst of a multi-phase, long-term expansion plan. The next major program initiative is a new Space Gallery which would house the orbiter in a new climate controlled Iindoor display hanger. The Air Force is most interested in Atlantis due to it being the primary Air Force/Department of Defense shuttle. Atlantis has included more than 30 Air Force astronauts among its crews. The Air Force and DoD also play critical roles in shuttle launch and recovery operations in a continuous, decades-long partnership with NASA. Credit: USAFThe proposed Shuttle Gallery at the Seattle Museum of Flight features a glass room for the Space Shuttle with a view of the stars. Credit: Seattle Museum of Flight
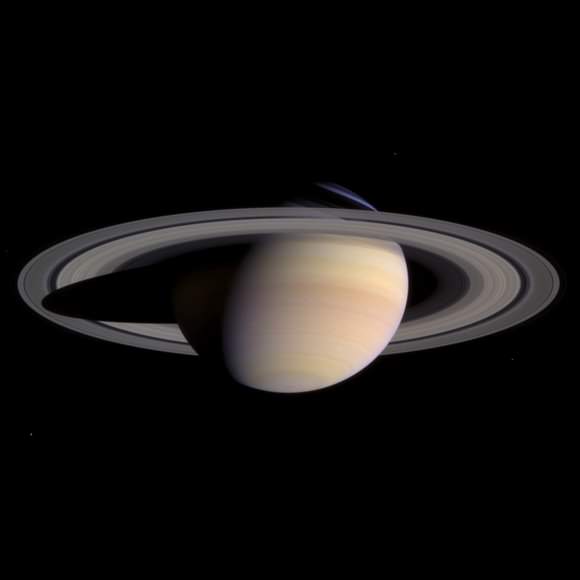
Saturn, imaged by Cassini on approach. Credit: CICLOPS
[/caption]
Planetary rings are more than just astronomical marvels — they’re also a sort of archive, chronicling histories of impacts for decades.
A pair of studies were published online in Science today by two different teams that noticed odd characteristics in the rings of Saturn and Jupiter — and followed them to this promising conclusion. In the first, lead author Mark Showalter of the SETI Institute in Mountain View, Calif. and his team analyzed images of Jupiter’s rings observed in 1996 and 2000 by Galileo, and again in 2007 by Horizon, zeroing in on a pattern they labeled “corrugated,” like a tin roof. Around the same time, Matthew Hedman, from Cornell University in Ithaca, NY and his colleagues discovered similar ripple patterns in the rings of Saturn, from images taken by the Cassini spacecraft.
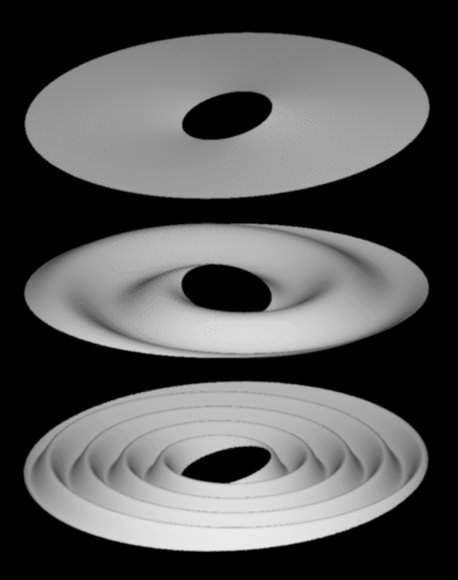
Image courtesy of Science/AAAS
The images above show how a vertical corrugation can be produced from an initially inclined ring. The top image shows a simple inclined ring (the central planet is omitted for clarity), while the lower two images show the same ring at two later times, where the ring particles’ wobbling orbits have sheared this inclined sheet into an increasingly tightly-wound spiral corrugation.
Carolyn Porco, a co-author on the Hedman-led study and director of the Cassini Imaging Central Laboratory for Operatons (CICLOPS), wrote in an email accompanying the release of the studies that “it has been known for some time that the solar system is filled with debris: small rocky bits in the inner solar system and icy bits in the
outer solar system that routinely rain down on the planets and their rings and moons. A couple hundred tons of such debris hits the Earth alone every day. Well, the origins of the spiral ripples in both ring systems have now been pinpointed to very recent impacts between clouds of cometary fragments and the rings.”
Showalter’s team describes a pair of superimposed ripple patterns that showed up in Galileo images in 1996 and again in 2000.
“These patterns behave as two independent spirals, each winding up at a rate defined by Jupiter’s gravity field,” they write. “The dominant pattern originated between July and October 1994, when the entire ring was tilted by ~2 km. We associate this with the ShoemakerLevy 9 impacts of July 1994. New Horizons images still show this pattern 13 years later and suggest that subsequent events may also have tilted the ring.”
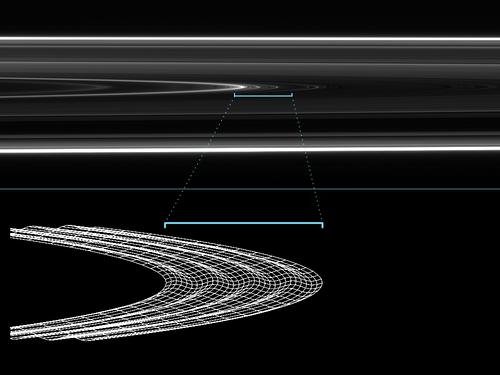
Corrugation in Saturn's D-ring. Credit: NASA
Hedman and his team note that rippling had previously been observed in Saturn’s D ring; NASA released the above graphic to explain the phenomenon in 2006. “The C-ring corrugation seems to have been similarly generated, and indeed it was probably created by the same ring-tilting event that produced the D-ring’s corrugation,” they write.
That paper also compares the rate of impacts likely to visit each planet: “… Saturn should encounter debris clouds derived from comets disrupted by previous planetary encounters at a rate that is roughly 0.2 percent of Jupiter’s impact rate.”
They reason that if Jupiter sees impacts from 1-km-wide objects as often as once a decade, “the clouds of orbiting debris created by the disruption of a 1-km-wide comet should rain down on Saturn’s rings once every 5,000-10,000 years. The probability that debris from a previously disrupted comet would hit Saturn’s rings in the last 30 years would then be between roughly 1 percent and 0.1 percent, which is not very small. Such scenarios therefore provide a reasonable explanation for the origin of the observed corrugation in Saturn’s C ring.”
Taken together, the papers show that Saturn’s ring ripples were likely generated by a comet collision in 1983, while Jupiter’s ring ripples occurred after the impact of a comet the summer of 1994 — specifically, the impact of Comet Shoemaker-Levy 9 that left scars on Jupiter still visible today.
Showalter and his coauthors point out that impacts by comets and/or their dust clouds are common occurrences in planetary rings.
“On at least three occasions over the last few decades, these collisions have carried sufficient momentum to tilt a ring of Jupiter or Saturn off its axis by an observable distance. Once such a tilt is established, it can persist for decades, with the passage of time recorded in its ever-tightening spiral,” they write. “Within these subtle patterns, planetary rings chronicle their own battered histories.”
Both papers appear today at the Science Express website. See also the CICLOPS site.
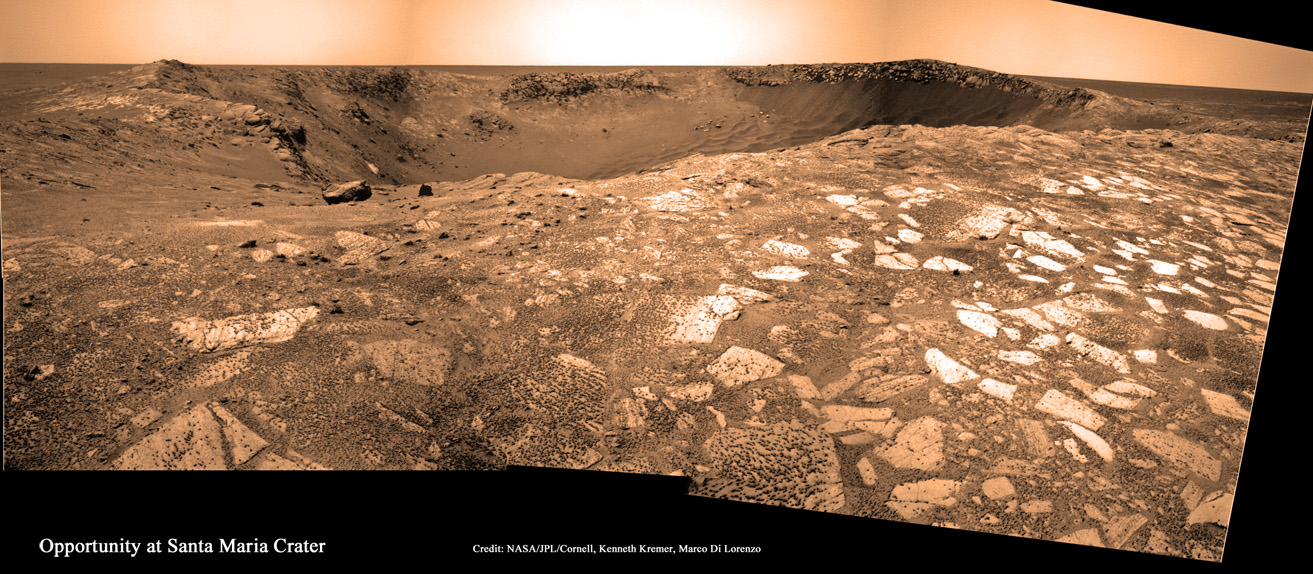
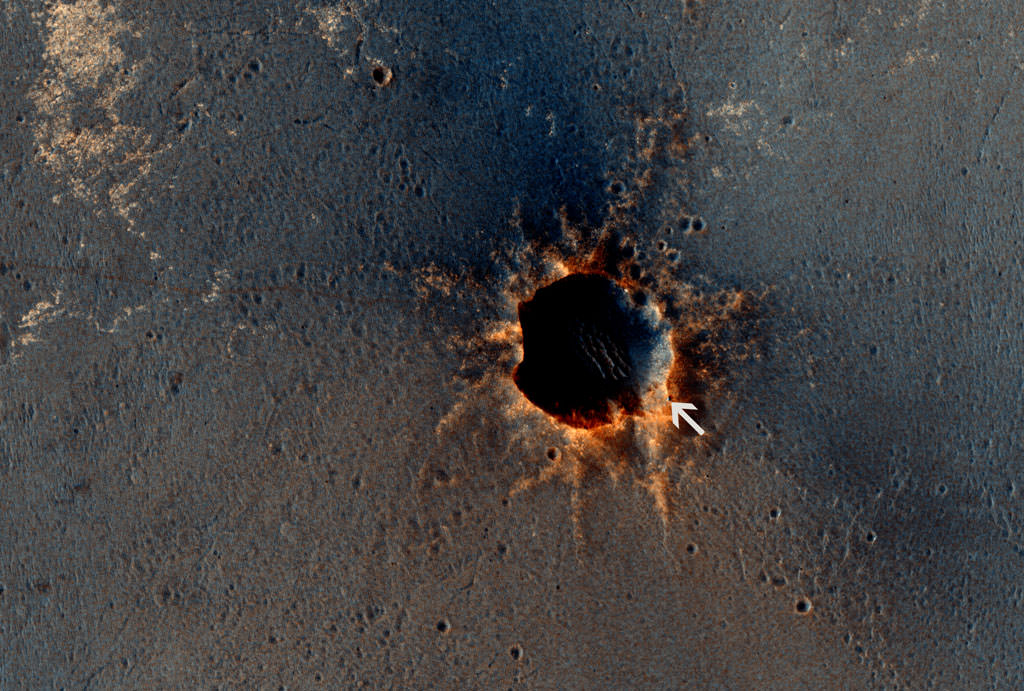
Yuma Outlook at Santa Maria Crater on Sol 2476, Jan 10, 2011. Opportunity arrived at the hydrated mineral deposits located here at the southeast rim of the crater. Self portrait of Opportunity at left, casts shadow of rover deck and mast at right. Credit: NASA/JPL/Cornell, Marco Di Lorenzo, Kenneth Kremer High resolution version on APOD, Jan. 29, 2011 ; http://apod.nasa.gov/apod/ap110129.html
Opportunity made landfall at the western edge of Santa Maria on Dec. 15, 2010 (Sol 2450) after a long and arduous journey of some 19 kilometers since departing from Victoria Crater nearly two and one half years ago in September 2008. Santa Maria is the largest crater that the rover will encounter on the epic trek between Victoria and Endeavour.
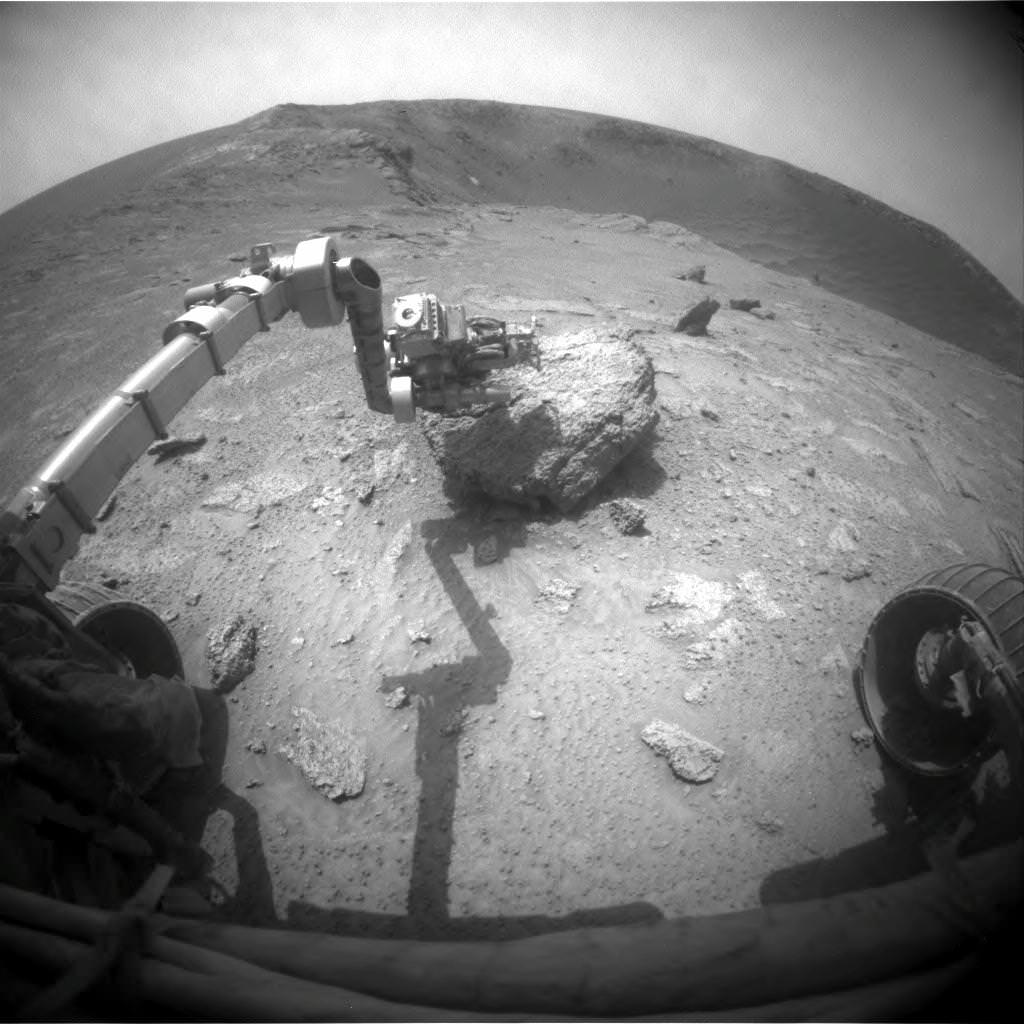
Robotic arm at work on Mars on Sol 2513, Feb 17, 2011. Opportunity grinds into rock target Luis De Torres’ with the RAT. Credit: NASA/JPL/CornellThe science team decided that Santa Maria would be the best location for an intermediate stop as well as permit a focused science investigation because of the detection of attractive deposits of hydrated minerals. The stadium sized and oval shaped crater is some 80 to 90 meters wide (295 feet) and about nine meters in depth.
Opportunity has since been carefully driven around the lip of the steep walled crater in a counterclockwise direction to reach the very interesting hydrated sulfates on the other side. The rover made several stops along the way to collect long baseline high resolution stereo images creating 3 D digital elevation maps and investigate several rocks in depth.
Opportunity was directed to Santa Maria based on data gathered from Mars orbit by the mineral mapping CRISM spectrometer – onboard the Mars Reconnaissance Orbiter (MRO) – which indicated the presence of exposures of water bearing sulfate deposits at the southeast rim of the crater.
Opportunity rover panoramic photomosaic near lip of Santa Maria Crater on Sol 2519, Feb. 23, 2011. Opportunity drove to exposed rock named Ruiz Garcia to investigate hydrated mineral deposits located here at southeast portion of crater. Credit: NASA/JPL/Cornell, Kenneth Kremer, Marco Di Lorenzo
“Santa Maria is a relatively fresh impact crater. It’s geologically very young, hardly eroded at all, and hard to date quantitatively,” said Ray Arvidson from Washington University in St. Louis. Arvidson is the deputy principal investigator for the Spirit and Opportunity rovers.
The rover had to take a pause anyway in its sojourn to Endeavour because of a restrictive period of solar conjunction. Conjunction is the period when the Sun is directly in between the Earth and Mars and results in a temporary period of communications disruptions and blackouts.
During conjunction – which lasted from Jan. 28 to Feb. 12 – the rover remained stationary. No commands were uplinked to Opportunity out of caution that a command transmission could be disrupted and potentially have an adverse effect.
Advantageously, the pause in movement also allows the researchers to do a long-integration assessment of the composition of a selected target which they might not otherwise have conducted.
By mid-January 2011, Opportunity had reached the location – dubbed ‘Yuma’ – at the southeast rim of the crater where water bearing sulfate deposits had been detected. A study of these minerals will help inform researchers about the potential for habitability at this location on the surface of Mars.
Opportunity at rim of Santa Maria crater as imaged from Mars orbit on March 1, 2011, Sol 2524.
Rover was extending robotic arm to Ruiz Garcia rock as it was imaged by NASA’s MRO orbiter.
Credit: NASA/JPL-Caltech/Univ. of Arizona
The rover turned a few degrees to achieve a better position for deploying Opportunity’s robotic arm, formally known as the instrument deployment device or IDD, to a target within reach of the arms science instruments.
“Opportunity is sitting at the southeast rim of Santa Maria,” Arvidson told me. “We used Opportunity’s Rock Abrasion Tool (RAT) to brush a selected target and the Moessbauer spectrometer was placed on the brushed outcrop. That spot was named ‘Luis De Torres’, said Arvidson.
Ruiz Garcia rock imaged by pancam camera on Sol 2419. Credit: NASA/JPL/Cornell‘Luis De Torres’ was chosen based on the bright, extensive outcrop in the region in which CRISM sees evidence of a hydrated sulfate signature.”
Opportunity successfully analyzed ‘Luis De Torres’ with all the instruments located at the end of the robotic arm; including the Microscopic Imager (MI), the alpha particle X-ray spectrometer (APXS) and then the Moessbauer spectrometer (MB) for a multi-week integration of data collection.
After emerging in fine health from the conjunction, the rover performed a 3-millimeter deep grind on ‘Luis De Torres’ with the RAT in mid-February 2011 to learn more about the rocks interior composition. Opportunity then snapped a series of microscopic images and collected spectra with the APXS spectrometer.
The rover then continued its counterclockwise path along the eastern edge of the crater, driving northwards some 30 meters along the crater rim to a new exposed rock target – informally named ‘Ruiz Garcia’ to collect more APXS spectra and microscopic images. See our mosaic showing “Ruiz Garcia” at the lip of the crater (above).
Opportunity finished up the exploration of the eastern side of Santa Maria in March by snapping a few more high resolution panoramas before resuming the drive to Endeavour crater which lies some 6.5 kilometers (4 miles) away.
Endeavour is Opportunity’s ultimate target in the trek across the Martian dunes because it possesses exposures of a hitherto unexplored type of even more ancient hydrated minerals, known as phyllosilicates, that form in neutral water more conducive to the formation of life.
Raw image from Opportunity's front hazard-avoidance camera on Sol 2524 ( March 1, 2011)
showing the robotic arm extended to Ruiz Garcia rock target. Credit: NASA/JPL/Cornell
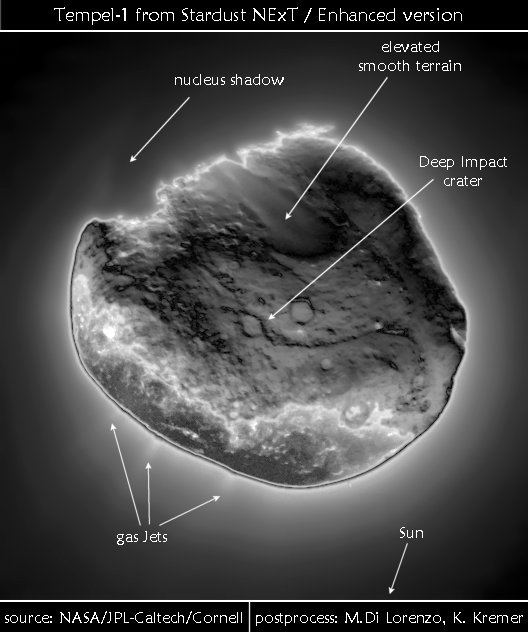
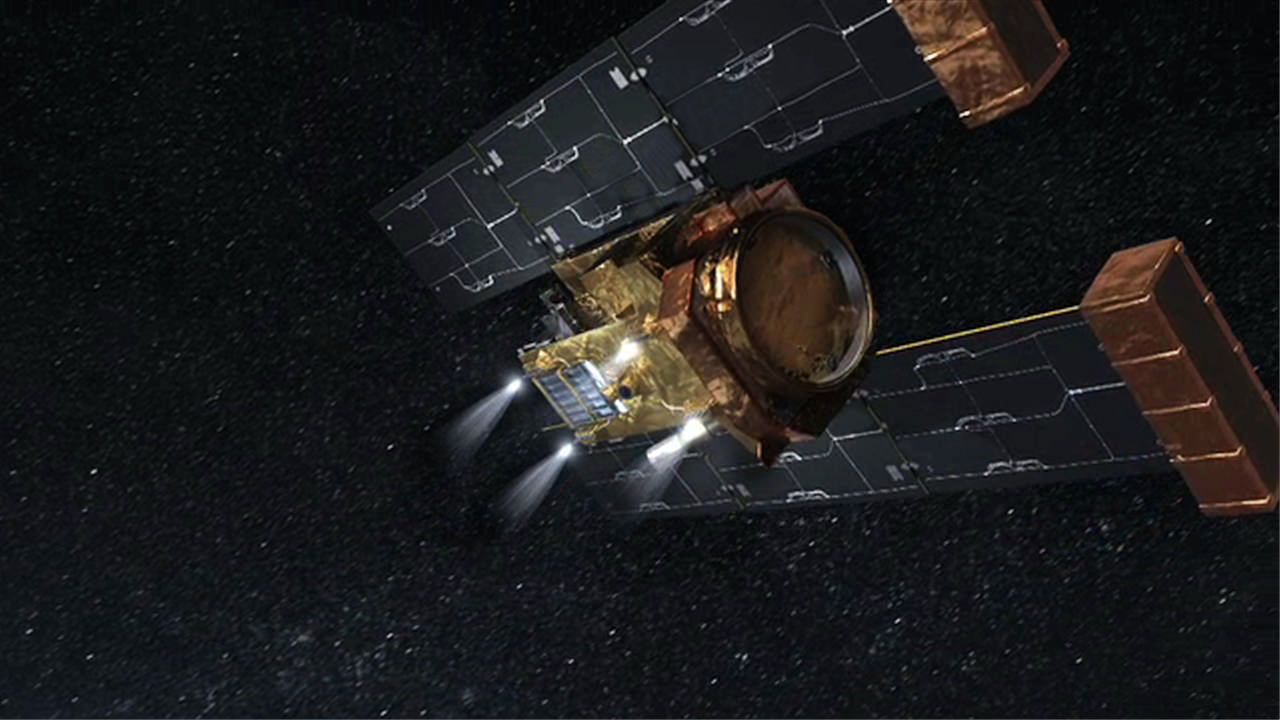
Stardust-NExT photographed jets of gas and particles streaming from Comet Tempel 1 during Feb 14, 2011 flyby. The raw image taken during closest approach has been extensively enhanced by outside analysts to visibly show the jets. Annotations show the location of the jets and the man-made crater created by a projectile hurled by NASA’s prior Deep Impact mission in 2005. Credit: NASA/JPL-Caltech/University of Maryland/Post process and annotations by Marco Di Lorenzo/Kenneth Kremer
[/caption]Farewell Stardust-NExT !
Today marks the end to the final chapter in the illustrious saga of NASA’s Stardust-NExT spacecraft, a groundbreaking mission of cometary exploration.
Mission controllers at NASA’s Jet Propulsion Laboratory commanded the probe to fire the main engines for the very last time today at about 7 p.m. EDT (March 24). The burn will continue until the spacecraft entirely depletes the tiny amount of residual fuel remaining in the propellant tanks. The Stardust probe is now being decommissioned and is about 312 million kilometers away from Earth.
This action will effectively end the life of the storied comet hunter, which has flown past an asteroid (Annefrank), two comets (Wild 2 and Tempel 1) and also returned the first ever pristine samples of a comet to Earth for high powered analysis by the most advanced science instruments available to researchers.
NASA’s Stardust space probe completed her amazing science journey on Feb. 14, 2011 by streaking past Comet Tempel 1 at 10.9 km/sec, or 24,000 MPH and successfully sending back 72 high resolution images of the comets nucleus and other valuable science data. Tempel 1 became the first comet to be visited twice by spacecraft from Earth.
During the Feb. 14, 2011 flyby of Comet Tempel 1, Stardust-NExT discovered the man-made crater created back in 2005 by NASA’s Deep Impact mission and also imaged gas jets eminating from the comet. My imaging partner Marco Di Lorenzo and myself prepared two posters illustrating the finding of the jets and the Deep Impact crater included in this article.
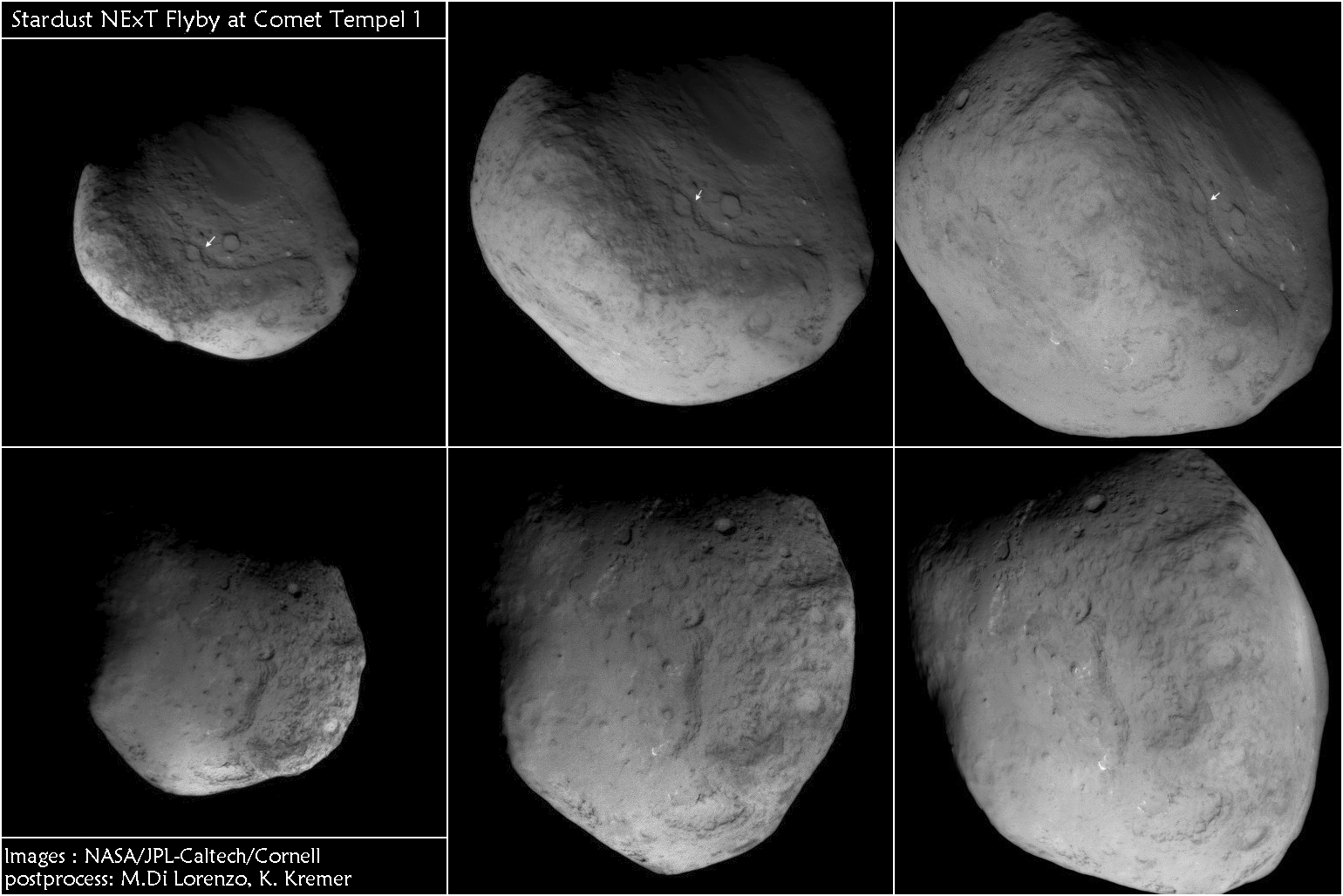
6 Views of Comet Tempel 1 and Deep Impact crater from Stardust-NExT spacecraft flyby on Feb. 14, 2011. Arrows show location of man-made crater created in 2005 by NASA’s prior Deep Impact comet smashing mission and newly imaged as Stardust-NExT zoomed past comet in 2011.
The images progress in time during closest approach to comet beginning at upper left and moving clockwise to lower left. Credit: NASA/JPL-Caltech/University of Maryland/Post process and annotations by Marco Di Lorenzo/Kenneth Kremer
The rocket burn will be the last of some 2 million rocket firings all told since the Stardust spacecraft was launched back in 1999. Over a dozen years, Stardust has executed 40 major flight path maneuvers and traveled nearly 6 billion kilometers.
The rocket firing also serves another purpose as a quite valuable final contribution to science. Since there is no fuel gauge on board or precise method for exactly determining the quantity of remaining fuel, the firing will tell the engineers how much fuel actually remains on board.
To date the team has relied on several analytical methods to estimate the residual fuel. Comparing the results of the actual firing experiment to the calculations derived from estimates will aid future missions in determining a more accurate estimation of fuel consumption and reserves.
“We call it a ‘burn to depletion,’ and that is pretty much what we’re doing – firing our rockets until there is nothing left in the tank,” said Stardust-NExT project manager Tim Larson of NASA’s Jet Propulsion Laboratory in Pasadena, Calif in a statement. “It’s a unique way for an interplanetary spacecraft to go out. Essentially, Stardust will be providing us useful information to the very end.”
Just prior to the burn, Stardust will turn its medium gain antenna towards Earth and transmit the final telemetry in real time. Stardust is being commanded to fire the thrusters for 45 minutes but the team expects that there is only enough fuel to actually fire for up to perhaps around ten minutes.
On March 24, at about 4 p.m. PDT, four rocket motors on NASA's Stardust spacecraft, illustrated in this artist's concept, are scheduled to fire until the spacecraft's fuel is depleted. Image credit: NASA/JPL-Caltech
As its final act, the transmitters will be turned off (to prevent accidental transmissions to other spacecraft), all communications will cease and that will be the end of Stardust’s life.
With no more fuel available, the probe cannot maintain attitude control, power its solar array or point its antenna. And its far enough away from any targets that there are no issues related to planetary protection requirements.
“I think this is a fitting end for Stardust. It’s going down swinging,” Larson stated in the press release.
Read more about the Stardust-NExT Flyby and mission in my earlier stories here, here, here, here, here, here and here
Relive the Feb. 14 Flyby of Comet Tempel 1 in this movie of NASA/JPL images
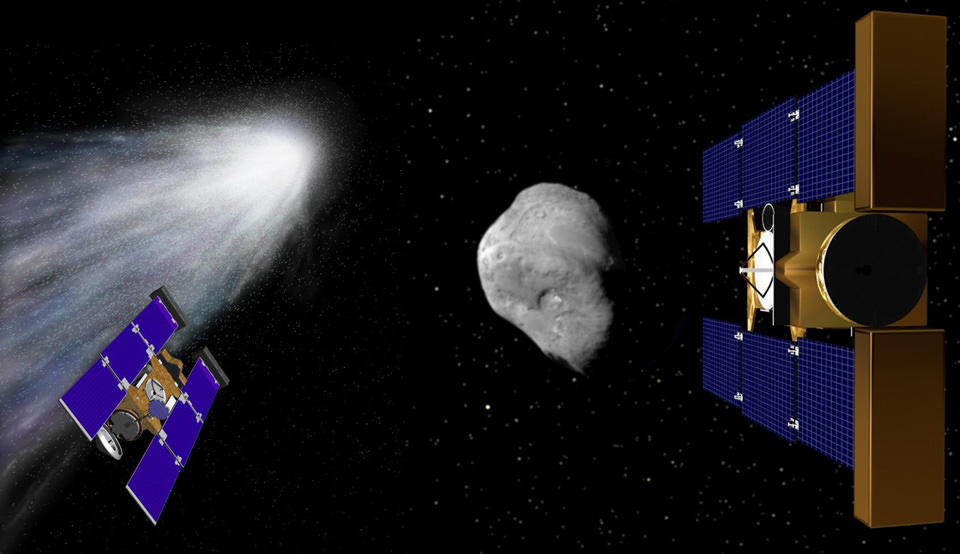
Stardust-NExT: 2 Comet Flybys with 1 Spacecraft.
Stardust-NExT made history on Valentine’s Day - February, 14, 2011 – Tempel 1 is the first comet to be visited twice by spacrecraft from Earth. Stardust has now successfully visited 2 comets and gathered science data: Comet Wild 2 in 2004 (left) and Comet Tempel 1 in 2011 (right).
Artist renderings Credit: NASA. Collage: Ken Kremer.Stardust-NExT location on March 11, 2011 just prior to farewell transmission. Credit: NASA/JPL
The second edition of "How Apollo Flew To The Moon" is set to be released this summer. Image Credit: Springer/Praxis
[/caption]
Apollo: the name conjures up images of spacesuit-clad astronauts riding fantastic machines to the surface of another world. But when it comes to the brass tacks, the mechanics of how it was accomplished – the image gets a little fuzzy.
It is with that in mind that author, engineer and historian David Woods has written: How Apollo Flew to the Moon. Now while this book is written by someone that has sat down with those involved with the Apollo Program and is an engineer himself – it doesn’t read that way. This appears to be one of Woods’ key considerations from the outset.
“I believe that the essential elements of any technology can be understood by any reasonably intelligent person, provided that the words can be found to explain it,” said Woods during an interview regarding the second edition of his book which was recently released. “This was the basis for this book. There’s no point in getting into the function of every electronic component or each equation used to describe a trajectory to the Moon, but I could see no reason why a person couldn’t come to understand the broad sweep of a mission and the many layers of technology and procedure that went into one.”
Many books that cover the Apollo Program delve a little too deeply into the technical aspects that made man’s first journey to another world possible. Novices, or those without engineering degrees get quickly bored and the books find themselves warming shelves.
How Apollo Flew To The Moon defeats this problem by breaking the technical hurdles, accomplishments and other aspects of the missions into bite-sized segments. It also avoids engineer-speak, explaining points in easy-to-understand language. It also is filled with color and black-and-white images as well as diagrams that explain how things happened, why other things were selected (and others weren’t) and so on.
The first edition of the book can be found on Amazon.com for around $30, whereas the newly updated second edition will set you back around $44.95. Given the attention to detail that is contained within this tome – it is well worth the additional cost to pick up the newer edition. How Apollo Flew To The Moon, second edition, is available for preorder from Amazon.com and other outlets. The book is scheduled to be released this summer.
“The book’s initial reception has been fantastic and I have been deeply humbled by folk’s kind words about it since it first came out,” Woods said. “The second edition is nearly ready and it expands on what was written in the first edition. At over 500 pages, it will be 25 percent larger with more color photographs throughout. There are additional stories of Apollo’s engineering triumphs both on the surface of the Moon as well as in flight, much of which reflects my continuing journey into the technical achievement that was Apollo.”
The first edition cover of "How Apollo Flew To The Moon." Image Credit: Springer/Praxis
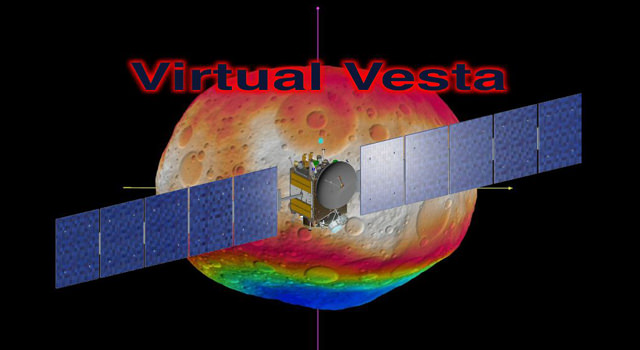
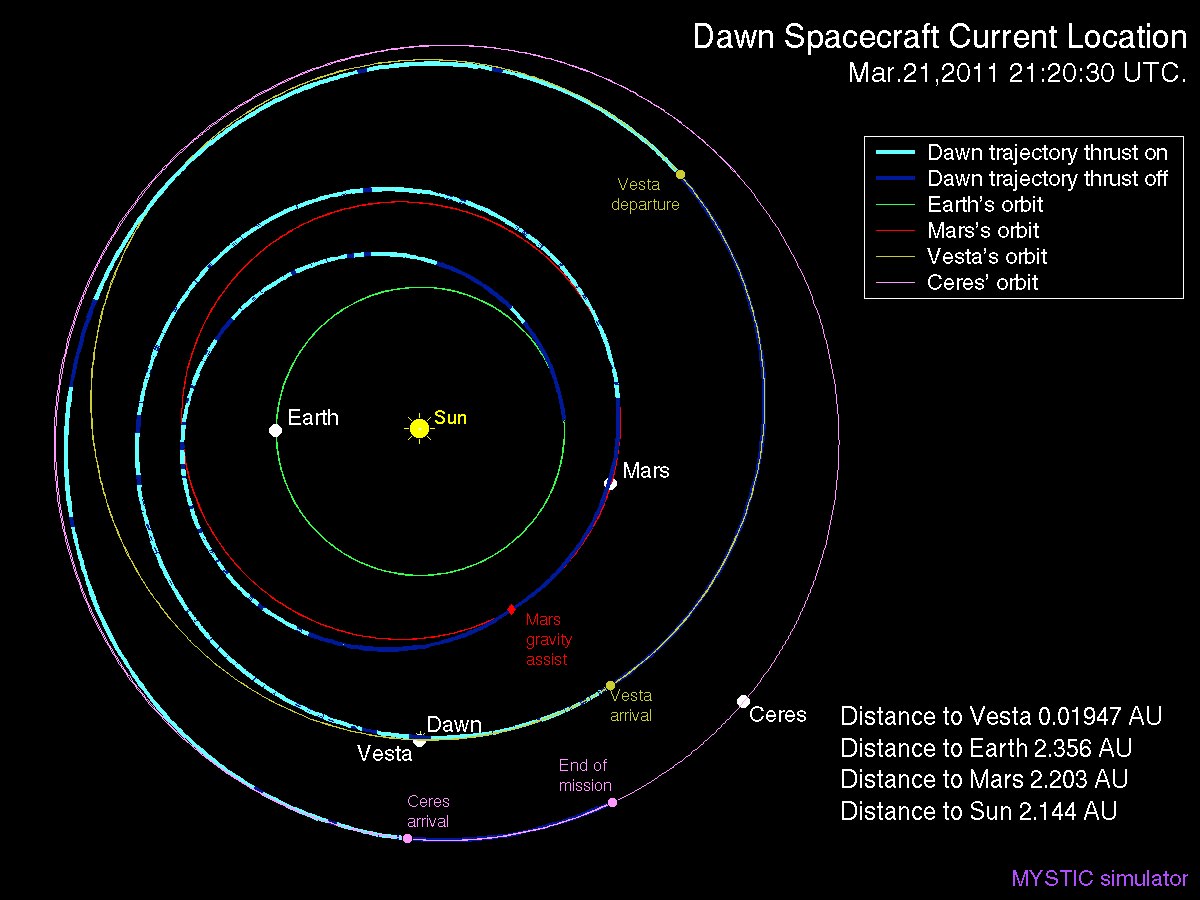
Virtual Vesta. Taking their best guess, the science team on NASA’s Dawn Asteroid Orbiter have created a series of still images and videos (see below) to simulate what the protoplanet Vesta might look like. The exercise was carried out by mission planners at NASA's Jet Propulsion Laboratory and science team members at the German Aerospace Center and the Planetary Science Institute. Image credit: NASA/JPL-Caltech/ESA/UCLA/DLR/PSI/STScI/UMd
[/caption]
The excitement is building as NASA’s innovative Dawn spacecraft closes in on its first protoplanetary target, the giant asteroid Vesta, with its camera eyes now wide open. The probe is on target to become the first spacecraft from Earth to orbit a body in the main asteroid belt and is set to arrive about four months from now in late July 2011.
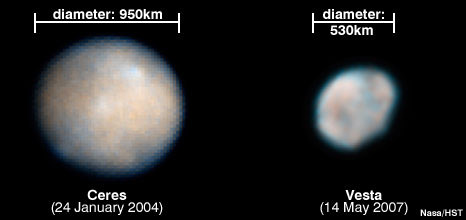
Vesta is the second most massive object in the Asteroid Belt between Mars and Jupiter (map below). Since it is also one of the oldest bodies in our Solar System, scientists are eager to study it and search for clues about the formation and early history of the solar system. Dawn will spend about a year orbiting Vesta. Then it will fire its revolutionay ion thrusters and depart for Ceres, the largest asteroid in our solar system.
Dawn is equipped with three science instruments to photograph and investigate the surface mineralogy and elemental composition of the asteroid. The instruments were provided by the US, Germany and Italy. The spacecraft has just awoken from a six month hibernation phase. All three science instruments have been powered up and reactivated.
Dawn will image about 80 percent of Vesta’s surface at muliple angles with the onboard framing cameras to generate topographical maps. During the year in orbit, the probe will adjust its orbit and map the protoplanet at three different and decreasing altitudes between 650 and 200 kilometers, and thus increasing resolution. The cameras were provided and funded by Germany.
To prepare for the imaging campaign, mission planners from the US and Germany conducted a practice exercise to simulate the mission as though they were mapping Vesta. The effort was coordinated among the science and engineering teams at NASA’s Jet Propulsion Laboratory, the Institute of Planetary Research of the German Aerospace Center (DLR) in Berlin and the Planetary Science Institute in Tuscon, Ariz.
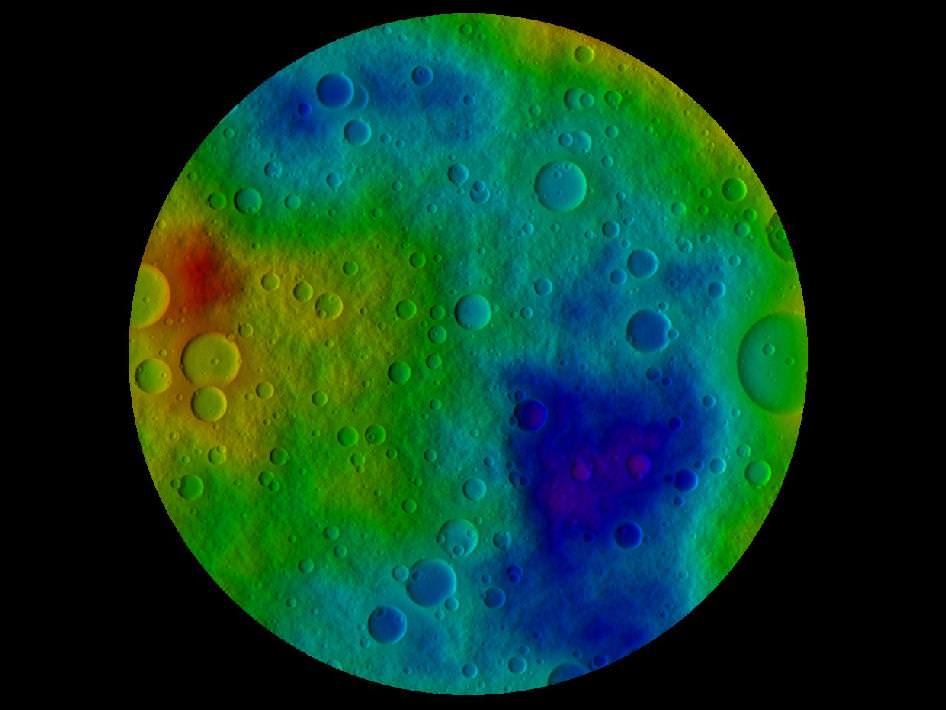
Simulated Vesta from the South Pole
This image shows the scientists' best guess to date of what the surface of the protoplanet Vesta might look like from the south pole, as projected onto a sphere 250 kilometers (160 miles) in radius. It was created as part of an exercise for NASA's Dawn mission involving mission planners at NASA's Jet Propulsion Laboratory and science team members at the Planetary Science Institute in Tuscon, Ariz. Credit: NASA/JPL-Caltech/UCLA/PSI
“We won’t know what Vesta really looks like until Dawn gets there,” said Carol Raymond in a NASA statement. Raymond is Dawn’s deputy principal investigator, based at JPL, who helped orchestrate the activity. “But we needed a way to make sure our imaging plans would give us the best results possible. The products have proven that Dawn’s mapping techniques will reveal a detailed view of this world that we’ve never seen up close before.”
Two teams worked independently and used different techniques to derive the topographical maps from the available data sets. The final results showed only minor differences in spatial resolution and height accuracy.
Using the best available observations from the Hubble Space Telescope and ground based telescopes and computer modeling techniques, they created maps of still images and a rotating animation (below) showing their best guess as to what Vesta’s surface actually looks like. The maps include dimples, bulges and craters based on the accumulated data to simulate topography and thus give a sense of Virtual Vesta in three dimensions (3 D).
“Working through this exercise, the mission planners and the scientists learned that we could improve the overall accuracy of the topographic reconstruction, using a somewhat different observation geometry,” said Nick Mastrodemo, Dawn’s optical navigation lead at JPL. “Since then, Dawn science planners have worked to tweak the plans to implement the lessons of the exercise.”
Dawn launch on September 27, 2007 by a Delta II rocket from Cape Canaveral Air Force Station, Florida. Credit: Ken KremerOf course no one will know how close these educated guesses come to matching reality until Dawn arrives at Vesta.
The framing camera system consists of two identical cameras developed and built by the Max Planck Institute for Solar System Research, Katlenburg-Lindau, Germany and the German Aerospace Center (DLR) in Berlin.
“The camera system is working flawlessly. The dry run was a complete success,” said Andreas Nathues, lead investigator for the framing camera at the Max Planck Institute in Katlenburg-Lindau, Germany.
Since the probe came out of hibernation, the mechanical and electrical components were checked out in mid March and found to be in excellent health and the software was updated.
Dawn is a mission of many firsts.
Dawn spacecraft under construction in Cleanroom.
Picture shows close up view of two science instruments;
The twin Framing Cameras at top (white rectangles) and VIR Spectrometer at right. Credit: Ken Kremer The spacecraft is NASA’s first mission specifically to the Asteroid Belt. It will become the first mission to orbit two solar system bodies.
The revolutionary Dawn mission is powered by exotic ion propulsion which is vastly more efficient than chemical propulsion thrusters. Indeed the ability to orbit two bodies in one mission is only enabled via the use of the ion engines fueled by xenon gas.
Vesta and Ceres are very different worlds that orbit between Mars and Jupiter. Vesta is rocky and may have undergone volcanism whereas Ceres is icy and may even harbor a subsurface ocean conducive to life.
Dawn will be able to comparatively investigate both celestial bodies with the same set of science instruments and try to unlock the mysteries of the beginnings of our solar system and why they are so different.
Dawn is part of NASA’sDiscovery program and was launched in September 2007 by a Delta II rocket from Cape Canaveral Air Force Station, Florida.
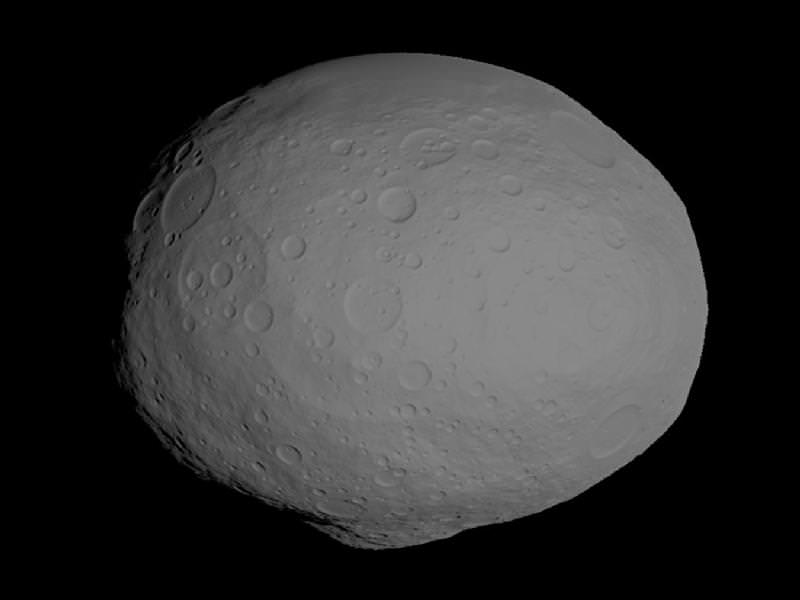
Virtual Vesta in 2 D.
This image shows a model of the protoplanet Vesta, using scientists' best guess to date of what the surface of the protoplanet might look like. The images incorporate the best data on dimples and bulges of Vesta from ground-based telescopes and NASA's Hubble Space Telescope. The cratering and small-scale surface variations are computer-generated, based on the patterns seen on the Earth's moon, an inner solar system object with a surface appearance that may be similar to Vesta. Credit: NASA/JPL-Caltech/UCLA/PSIVirtual Vesta in 3 D.
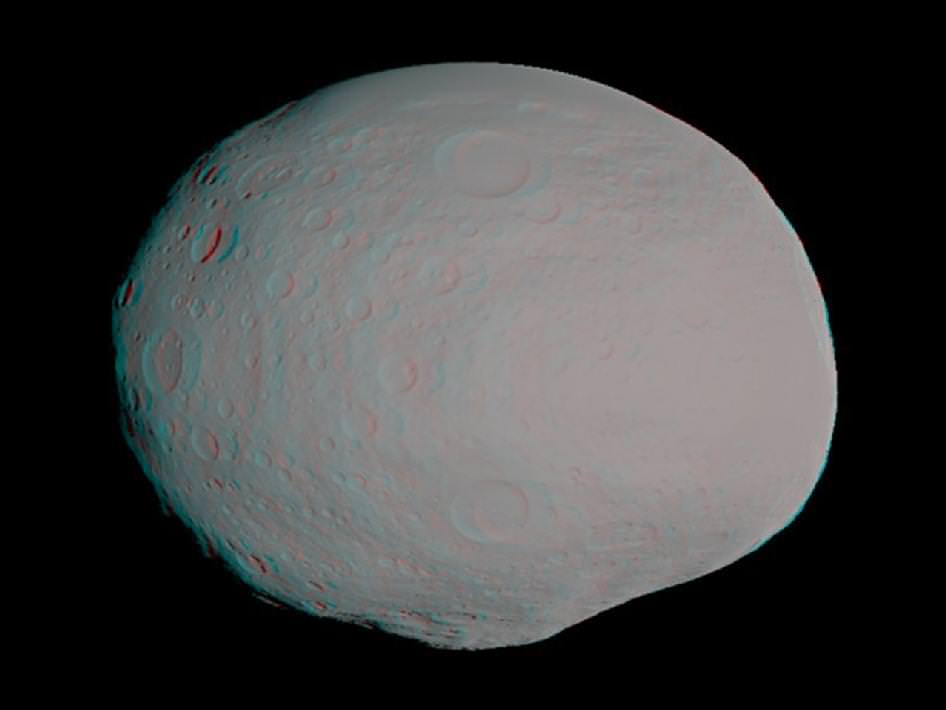
This anaglyph -- best viewed through red-blue glasses -- shows a 3-D model of the protoplanet Vesta, using scientists' best guess to date of what the surface of the protoplanet might look like. Image credit: NASA/JPL-Caltech/UCLA/PSI Dawn Spacecraft current location approaching Asteroid Vesta on March 21, 2011
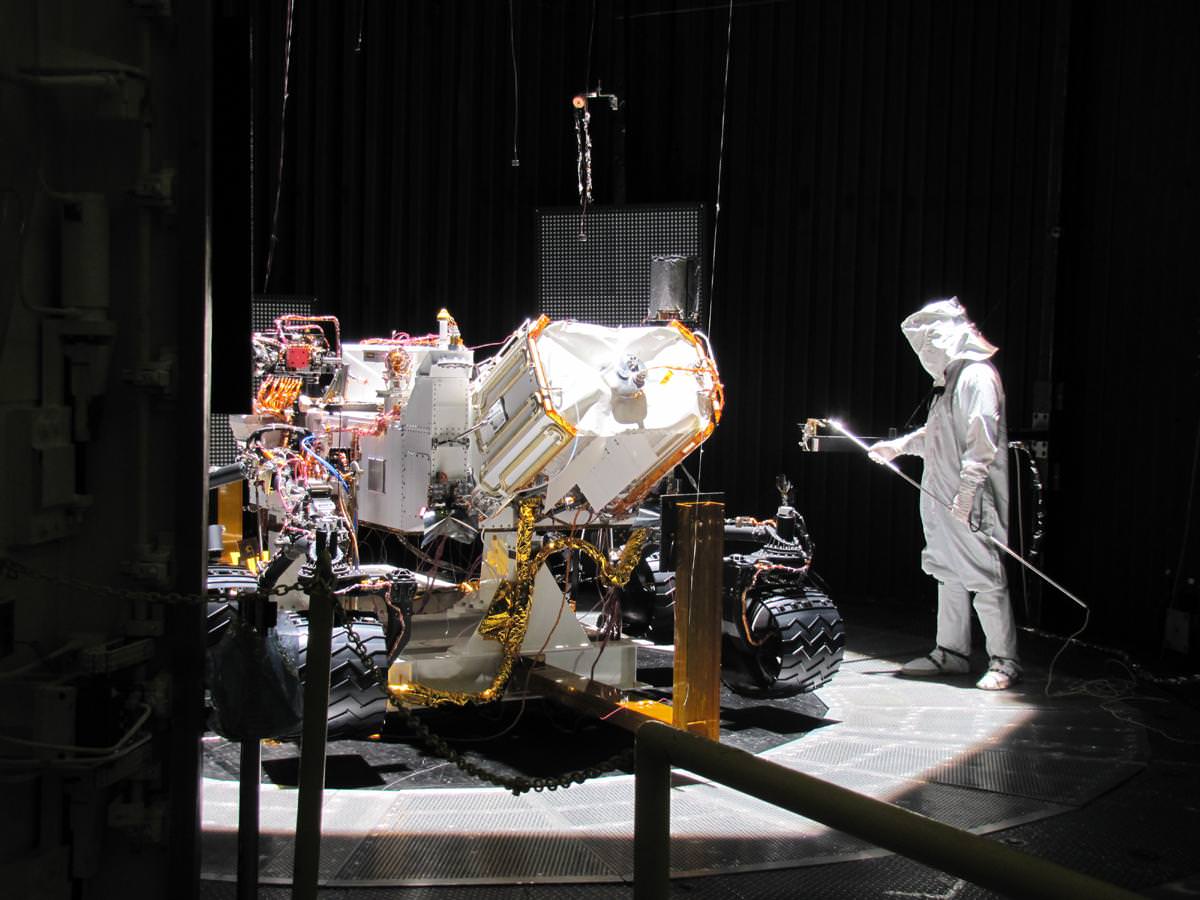
NASA’s Curiosity Rover inside a high vacuum environmental testing chamber at NASA's Jet Propulsion Laboratory. Engineers placed Curiosity inside the chamber to simulate the surface conditions on Mars that the rover will experience after landing in August 2012. Credit: NASA/JPL-Caltech
Curiosity, also known as the Mars Science Laboratory or MSL, is the size of a mini-Cooper. It was placed inside a 7.6 meter (25 foot) diameter high vacuum chamber at NASA’s Jet Propulsion Laboratory. Engineers are now conducting an extensive regimen of tests that will check out the performance and operational capabilities of the rover under Mars-like conditions.
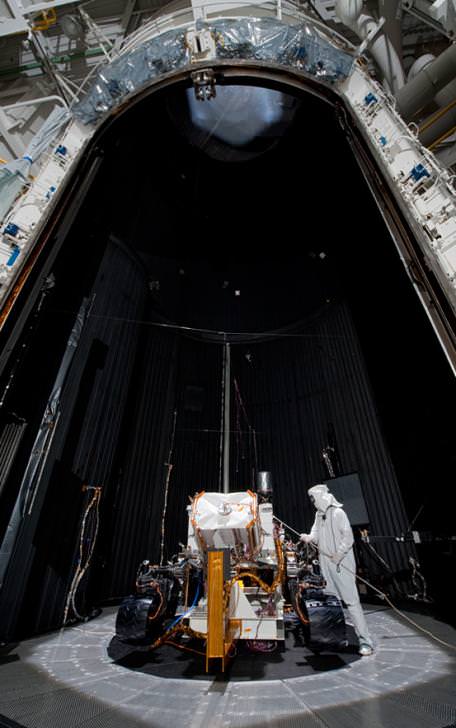
Curiosity enters the 7.6-meter-diameter space-simulation chamber on March 8, 2011 at NASA's Jet Propulsion Laboratory, Pasadena, Calif. The rover is fully assembled with all primary flight hardware and instruments. The test chamber's door is still open in this photo. Credit: NASA/JPL-CaltechSince the atmosphere of Mars is very thin – roughly 0.6% compared to Earth – most of the air was pumped out to simulate the meager atmospheric pressure on the surface of Mars.
The internal chamber temperature was decreased to minus 130 degrees Celsius (minus 202 degrees Fahrenheit) using liquid nitrogen flowing through the chamber walls to approximate the Antarctic like bone chilling cold. Martian lighting conditions are being simulated by a series of powerful lamps.
Upon successful completion of the testing, all components of the MSL spacecraft system will be shipped to the Kennedy Space Center for final integration. This includes the cruise stage, descent stage and back shell.
MSL will land using a new and innovative sky crane system instead of airbags. Using the helicopter-like sky crane permits the delivery of a heavier rover to Mars and with more weight devoted to the science payload. Indeed the weight of Curiosity’s science payload is ten times that of any prior Mars rover mission.
Artist's concept illustrates Mars rover Curiosity traversing across martian surface. Credit: NASA/JPL-Caltech
MSL also features a precision landing system to more accurately guide the rover to the desired target than past missions, to within an ellipse about 20 kilometers long. After extensive evaluation, four landing sites where water once flowed have been selected for further evaluation. The final decision will come sometime in 2011.
Curiosity is about twice the size and four times the weight compared to NASA’s Spirit and Opportunity Mars Explorations Rovers which landed on Mars back in 2004. Opportunity continues to stream back science data from Mars after seven years. The fate of Spirit is unknown at this time as the plucky rover has been out of contact since entering hibernation in March 2010.
The science goal of Curiosity is to search the landing site for clues about whether environmental conditions favorable for microbial life existed in the past or even today on Mars and whether evidence for life may have been preserved in the geological record.
The rover is being targeted to an area where it is believed that liquid water once flowed and may be habitable. In particular the science teams hope to sample and investigate phyllosilicate clays, which are minerals that form in neutral watery conditions more favorable to the formation of life compared to the more acidic environments investigated thus far by Spirit and Opportunity.
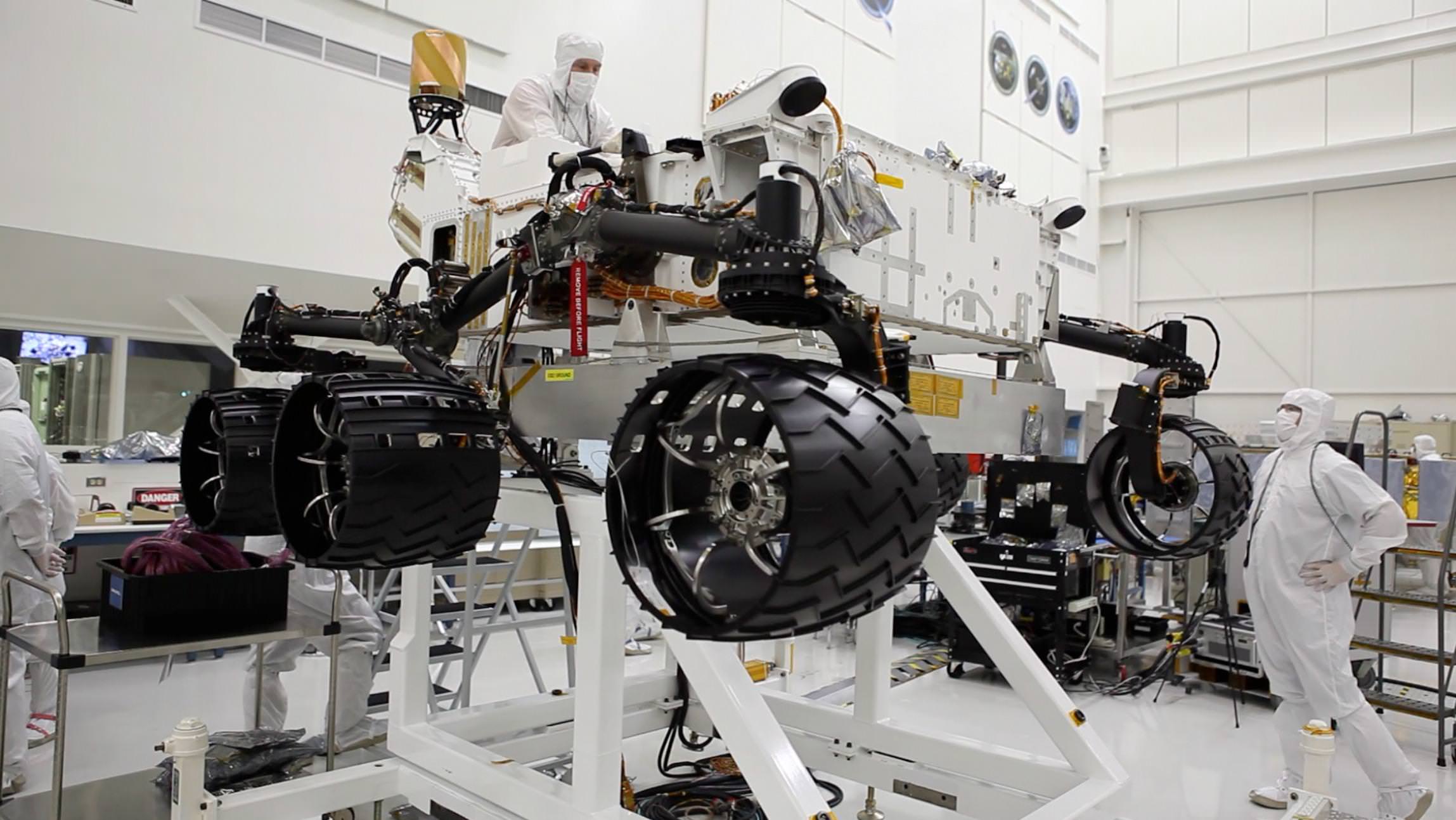
Engineers work on the six wheeled Curiosity rover in a clean room at NASA's Jet Propulsion Laboratory. Credit: NASA/JPL-Caltech