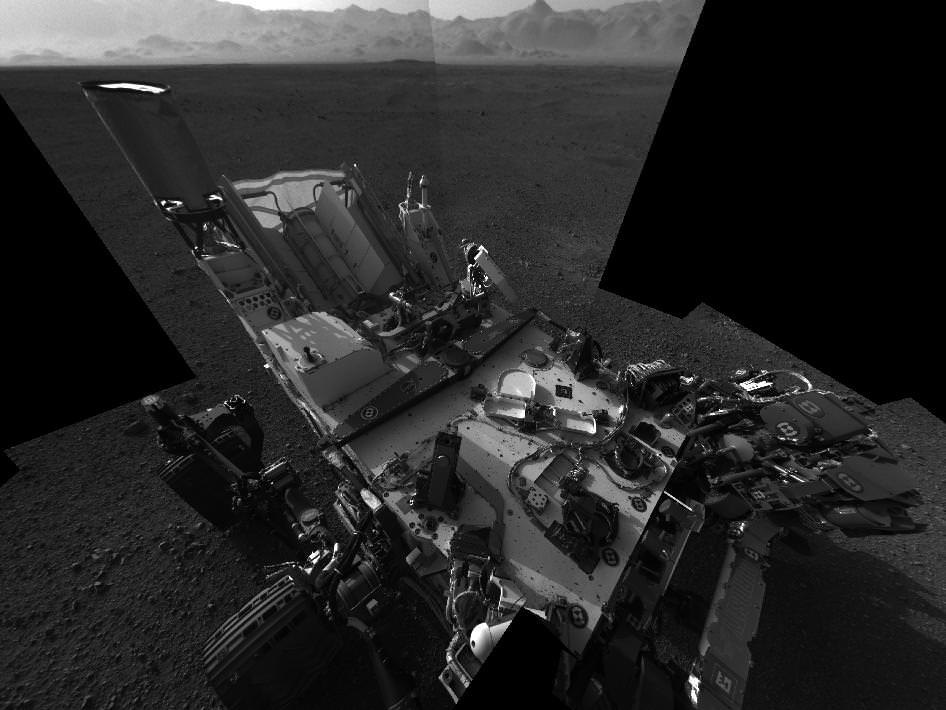
Image Caption: This self-portrait shows the deck of NASA’s Curiosity rover from the rover’s Navigation camera. The image is distorted because of the wide field of view. The back of the rover can be seen at the top left of the image, and two of the rover’s right side wheels can be seen on the left. The undulating rim of Gale Crater forms the lighter color strip in the background. Bits of gravel, about 0.4 inches (1 centimeter) in size, are visible on the deck of the rover. Credit: NASA/JPL-Caltech
The 1st firing of Curiosity’s rock zapping laser and 1st motion of her six wheels is imminent and likely to take place within the next 24 to 72 hours said mission scientists at Friday’s (Aug 17) media briefing at NASA’s Jet Propulsion Lab (JPL) in Pasadena, Calif., home to mission control for the nuclear-powered, car-sized robot.
Furthermore the team has decided on the target of her 1st Martian Trek, a science hot spot dubbed Glenelg because it lies at the natural intersection of three different types of geologic formations (see graphic below), including layered bedrock and an alluvial fan through which liquid water flowed eons ago. Glenelg is about 400 meters (1300 feet) east of the rover’s landing site.
With each passing Sol, or Martian day, NASA biggest, best and most daring mobile lab becomes ever more capable, like a growing child, as engineers energize and successfully test more and more of her highly advanced systems to accomplish feats of exploration and discovery never before possible.
“Everything is going really well,” said John Grotzinger, project scientist for NASA’s Curiosity Mars Science Lab (MSL) rover. “The excitement from the point of view of the science team is all the instruments continue to check out.”

Image Caption: Martian Treasure Map -This image shows the landing site of NASA’s Curiosity rover and destinations scientists want to investigate. Curiosity landed inside Gale Crater on Mars on Aug. 5 PDT (Aug. 6 EDT) at the green dot, within the Yellowknife quadrangle. The team has chosen for it to move toward the region marked by a blue dot that is nicknamed Glenelg. That area marks the intersection of three kinds of terrain. The science team thought the name Glenelg was appropriate because, if Curiosity traveled there, it would visit it twice — both coming and going — and the word Glenelg is a palindrome. Then, the rover will aim to drive to the blue spot marked “Base of Mt. Sharp”, which is a natural break in the dunes that will allow Curiosity to begin scaling the lower reaches of Mount Sharp. At the base of Mt. Sharp are layered buttes and mesas that scientists hope will reveal the area’s geological history. The image was acquired by the High Resolution Imaging Science Experiment (HiRISE) camera on NASA’s Mars Reconnaissance Orbiter. Credit: NASA/JPL-Caltech/Univ. of Arizona
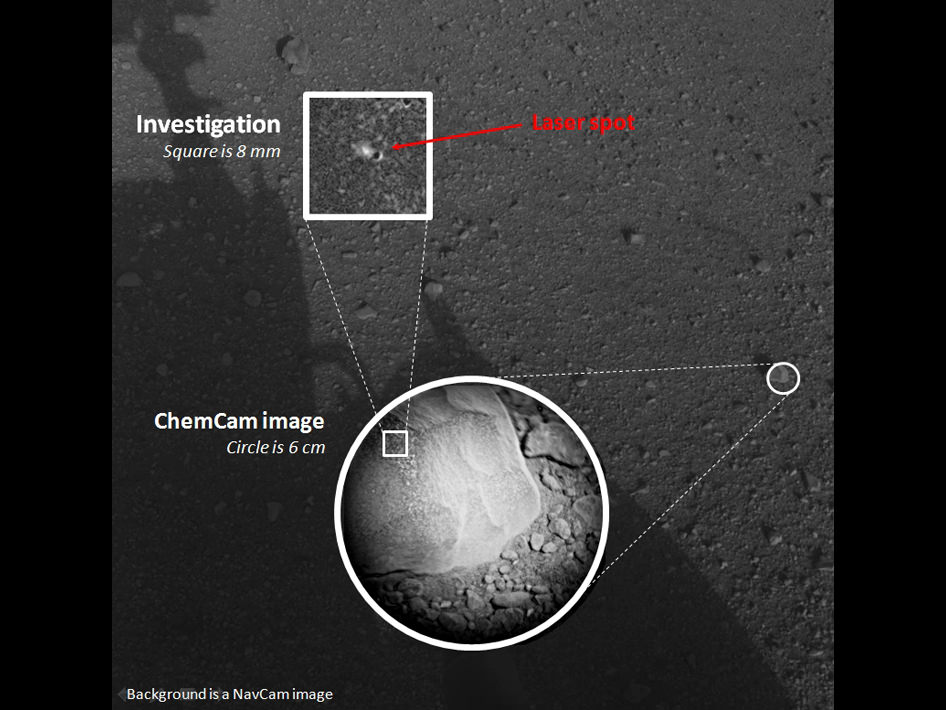
Curiosity will blast her first rock, dubbed N165, in the history of planetary science as early as Saturday night, Aug. 18, with the powerful mast-mounted laser and telescope on the Chemistry and Camera instrument, or ChemCam that includes spectrometers inside the rover.
ChemCam is a remote sensing instrument. It will get the most use by analyzing about 14,000 samples and help winnow down the targets and guide Curiosity to the most interesting samples for detailed analysis, Wiens explained.
“Rock N165 looks like your typical Mars rock, about three inches wide. It’s about 10 feet away,” said Roger Wiens, principal investigator of the ChemCam instrument from the Los Alamos National Laboratory in New Mexico. “We are going to hit it with 14 millijoules of energy 30 times in 10 seconds. It is not only going to be an excellent test of our system, it should be pretty cool too.”
ChemCam has a range of about 23 feet (7 meters). It fires with a million watts of power for 5 billionths of a second, sufficient energy to excite a pinhead sized spot to a glowing plasma that the instrument observes with the spectrometer below deck to identify the chemical composition.

Image caption: This mosaic image shows the first target NASA’s Curiosity rover aims to zap with a laser on its Chemistry and Camera (ChemCam) instrument, a rock provisionally named N165. Credit: NASA/JPL-Caltech/MSSS/LANL
“We are very excited. Our team has waited eight long years to get to this date and we’re happy that everything is looking good so far,” said Wiens. “Hopefully we’ll be back early next week and be able to talk about how Curiosity’s first laser shots went.”
We will take images of Rock N165 before and after the laser firing. The camera has the same resolution as the Mastcam and can take images that resolve to the width of a human hair from 7 feet away.
Engineers plan to turn the rover’s wheels over the next few days and execute a short test drive and turns of about 10 feet (3 meters).
Grotzinger indicated the drive to Glenelg could take a month or more.
“We will drive efficiently to Glenelg and it will take about 3 to 4 weeks. Along the way we may do scooping to take some soil samples if we find fine grained materials”
Glenelg, a palindrome, is also the 1st location where Curiosity will actually drill into rocks. Then it will deliver sifted samples into the two analytical chemistry instruments, SAM (Sample Analysis at Mars) and CheMin (Chemistry and Minerology), which will determine the chemical and mineralogical composition and search for signs of organic molecules – the carbon based molecules that are the building blocks of life.
“We’ll stay and do about a month or more of science at Glenelg”
“With such a great landing spot in Gale Crater, we literally had every degree of the compass to choose from for our first drive,” Grotzinger said. “We had a bunch of strong contenders. It is the kind of dilemma planetary scientists dream of, but you can only go one place for the first drilling for a rock sample on Mars. That first drilling will be a huge moment in the history of Mars exploration.”
After thoroughly investigating Glenelg until around the end of this calendar year, then it’s off to Mount Sharp, an 18,000 foot tall mound (5.5 km) that’s the missions ultimate destination because it preserves millions to billions of years of Martian history, stretching from the wet water era of billions of years ago to the more recent desiccated era. It could take a year or so to reach the base.
Mount Sharp is about 7 kilometers (4.4 miles) distant from the current location of Curiosity.
“What’s really cool about this topography is that the crater rim kind of looks like the Mojave Desert and now what you see here kind of looks like the Four Corners area of the western U.S., or maybe around Sedona, Ariz., where you’ve got these buttes and mesas made out of these layered, kind of light-toned reddish-colored outcrops. There’s just a rich diversity over there,” Grotzinger said at the briefing.
Curiosity will spend years climbing Mount Sharp in search of sedimentary layers of clays and sulfates, the hydrated minerals that form in flowing liquid water and could hold the ingredients of life.
New high resolution images of the foothills of Mount Sharp from Curiosity show the giant mountain’s base is littered with mesas and buttes ranging in height from 1 to 3 story tall buildings, with valleys in between.
Curiosity’s goal is to search for signs of Martian microbial habitats, past or present, with the most sophisticated suite of 10 state of the art science instruments ever sent to the surface of another planet.
Ken Kremer

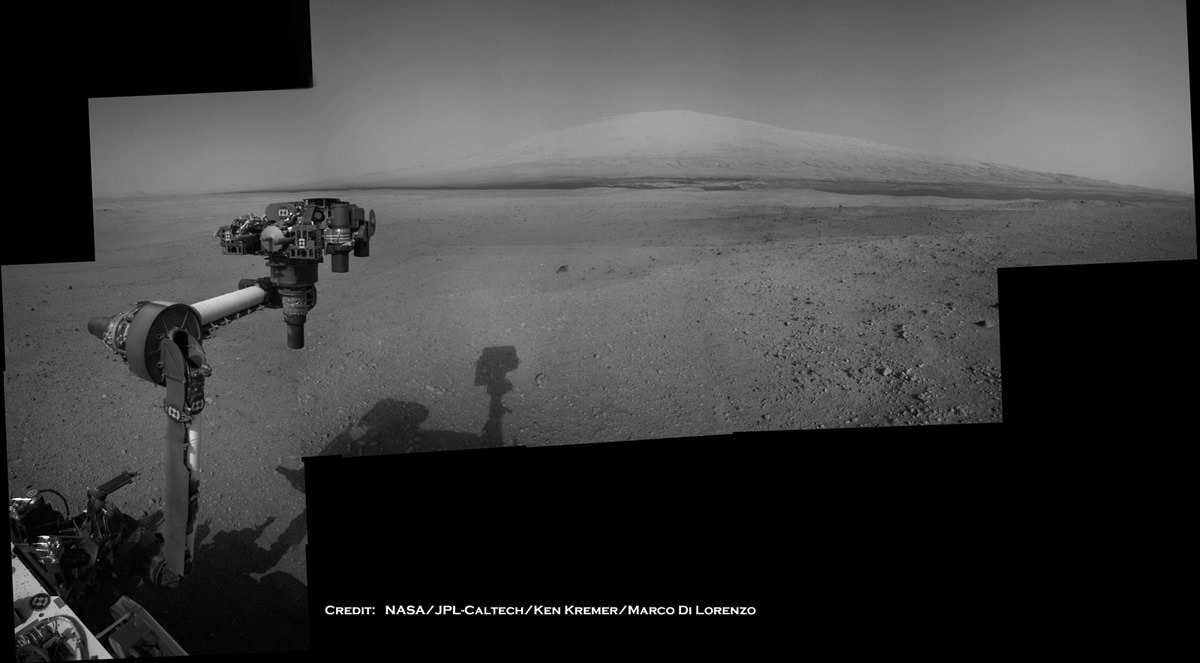
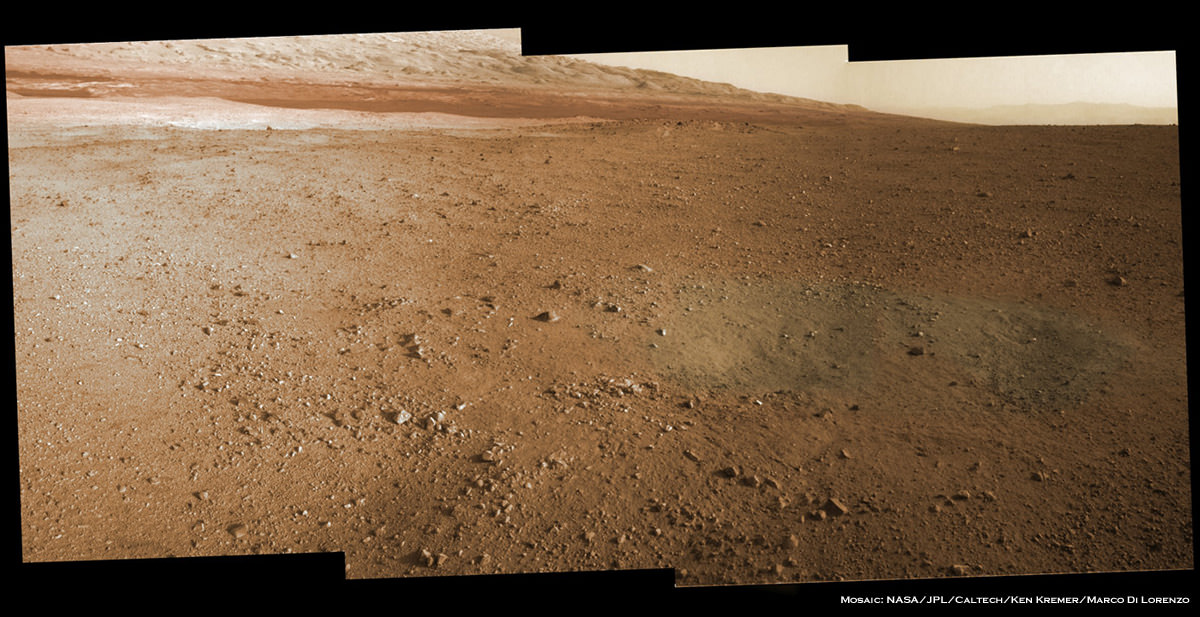
Image Caption: Curiosity’s Wheels on Mars set to Rove soon inside Gale Crater. This colorized mosaic shows Curiosity wheels, UHF antenna, nuclear power source and pointy low gain antenna (LGA) in the foreground looking to the eroded northern rim of Gale Crater in the background. The mosaic was assembled from full resolution Navcam images snapped by Curiosity on Sol 2 on Aug. 8. Image stitching and processing by Ken Kremer and Marco Di Lorenzo. Credit: NASA/JPL-Caltech/Ken Kremer/Marco Di Lorenzo