Doesn’t this make you want to book a trip on the next spaceship? Stunning footage from space here shows what auroras look like from the International Space Station. So many ripples of green. Such awesomeness.
Tracks in the snow mark Expedition 41's landing from the space station Nov. 9, 2014. Credit: NASA/Bill Ingalls
Check out that landing mark! A Soyuz spacecraft carrying three people touched down safely in remote Kazakhstan late Sunday (EDT) and went for a brief sleigh ride in the snow, as you can see from the drag marks on the landscape.
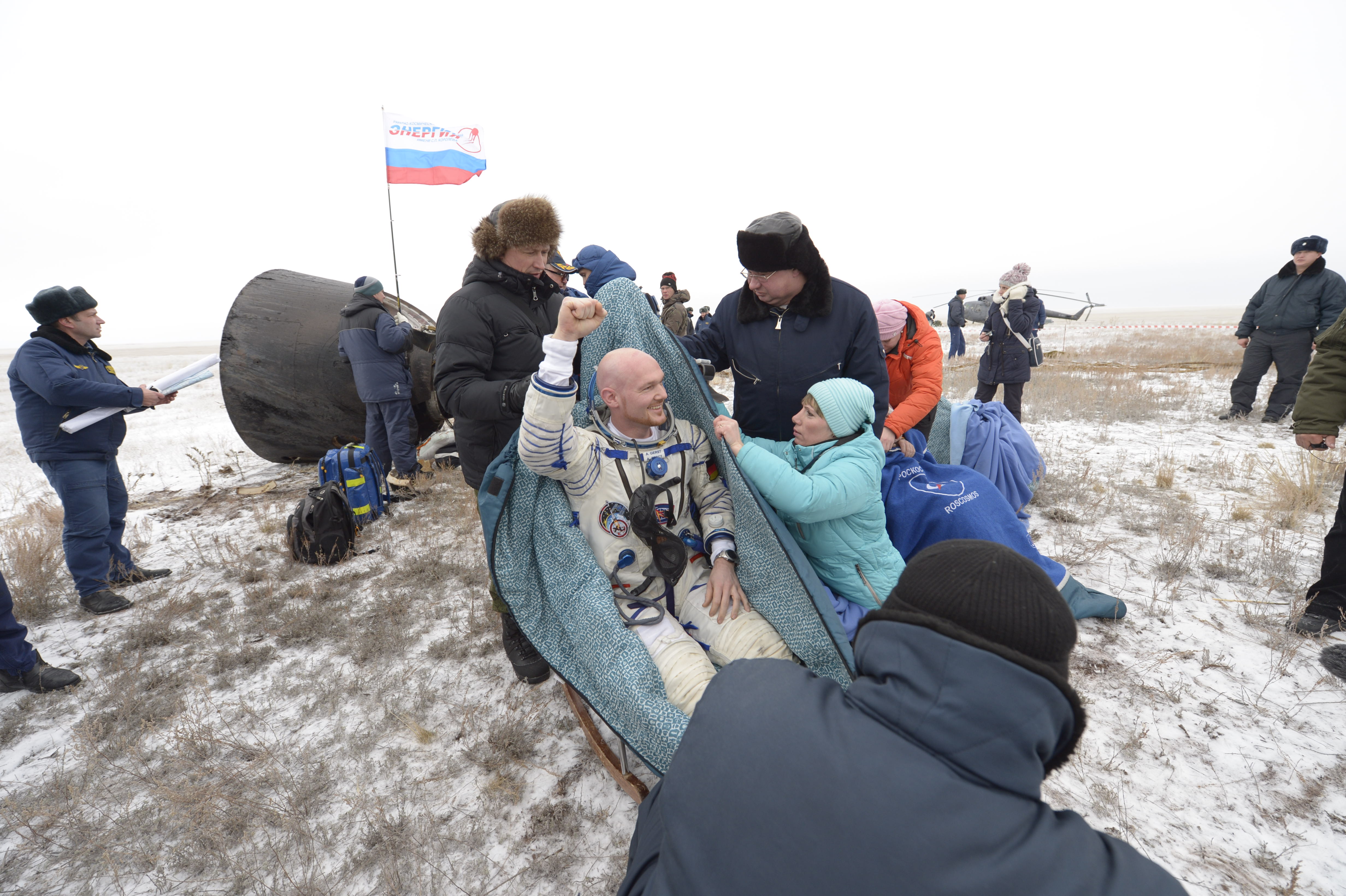
The flawless landing included the Expedition 40/41 crew members of Reid Wiseman (NASA), Alexander Gerst (European Space Agency) and Maxim Suraev (Roscosmos), who spent 165 days in space, mainly living on the International Space Station. Check out some more landing pictures and video below.
Alexander Gerst, an astronaut from the European Space Agency, does a fist pump shortly after the safe Expedition 41 landing Nov. 9, 2014. Credit: ESA–S. Corvaja, 2014
A conceptual image of the Transiting Exoplanet Survey Satellite.
Image Credit: MIT
NASA’s ongoing hunt for exoplanets has entered a new phase as NASA officially confirmed that the Transiting Exoplanet Survey Satellite (TESS) is moving into the development phase. This marks a significant step for the TESS mission, which will search the entire sky for planets outside our solar system (a.k.a. exoplanets). Designed as the first all-sky survey, TESS will spend two years of an overall three-year mission searching both hemispheres of the sky for nearby exoplanets.
Previous sky surveys with ground-based telescopes have mainly picked out giant exoplanets. In contrast, TESS will examine a large number of small planets around the very brightest stars in the sky. TESS will then record the nearest and brightest main sequence stars hosting transiting exoplanets, which will forever be the most favorable targets for detailed investigations. During the third year of the TESS mission, ground-based astronomical observatories will continue monitoring exoplanets identified by the TESS spacecraft.
“This is an incredibly exciting time for the search of planets outside our solar system,” said Mark Sistilli, the TESS program executive from NASA Headquarters, Washington. “We got the green light to start building what is going to be a spacecraft that could change what we think we know about exoplanets.”
“During its first two years in orbit, the TESS spacecraft will concentrate its gaze on several hundred thousand specially chosen stars, looking for small dips in their light caused by orbiting planets passing between their host star and us,” said TESS Principal Investigator George Ricker of the Massachusetts Institute of Technology..
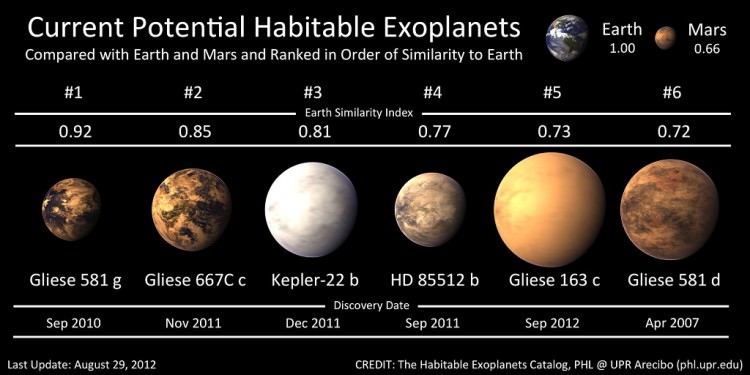
Artistic representations of known exoplanets with any possibility to support life. Image Credit: Planetary Habitability Laboratory, University of Puerto Rico, Arecibo.
All in all, TESS is expected to find more than 5,000 exoplanet candidates, including 50 Earth-sized planets. It will also find a wide array of exoplanet types, ranging from small, rocky planets to gas giants. Some of these planets could be the right sizes, and orbit at the correct distances from their stars, to potentially support life.
“The most exciting part of the search for planets outside our solar system is the identification of ‘earthlike’ planets with rocky surfaces and liquid water as well as temperatures and atmospheric constituents that appear hospitable to life,” said TESS Project Manager Jeff Volosin at NASA’s Goddard Space Flight Center in Greenbelt, Maryland. “Although these planets are small and harder to detect from so far away, this is exactly the type of world that the TESS mission will focus on identifying.”
Now that NASA has confirmed the development of TESS, the next step is the Critical Design Review, which is scheduled to take place in 2015. This would clear the mission to build the necessary flight hardware for its proposed launch in 2017.
“After spending the past year building the team and honing the design, it is incredibly exciting to be approved to move forward toward implementing NASA’s newest exoplanet hunting mission,” Volosin said.
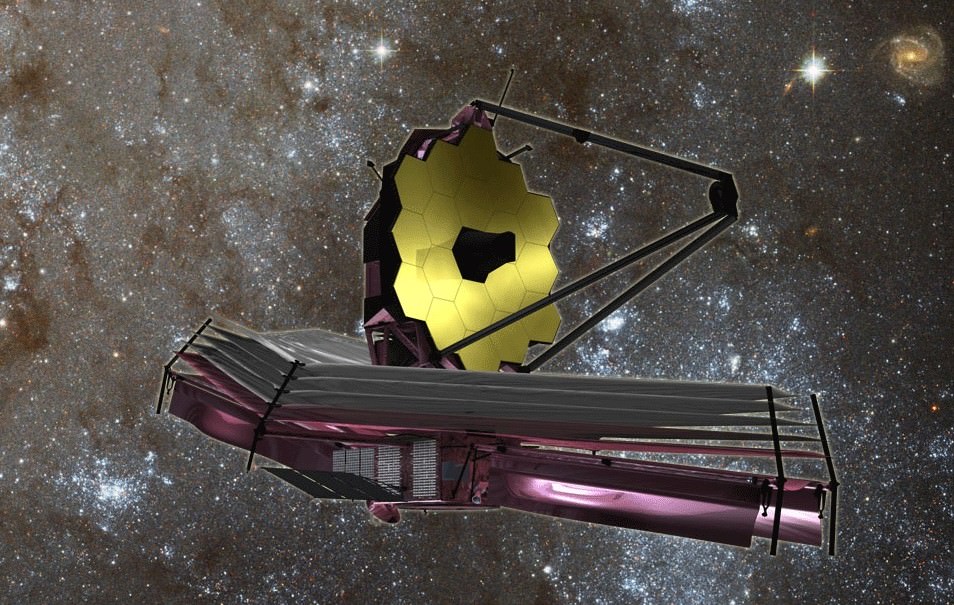
TESS is designed to complement several other critical missions in the search for life on other planets. Once TESS finds nearby exoplanets to study and determines their sizes, ground-based observatories and other NASA missions, like the James Webb Space Telescope, would make follow-up observations on the most promising candidates to determine their density and other key properties.
The James Webb Space Telescope. Image Credit: NASA/JPL
By figuring out a planet’s characteristics, like its atmospheric conditions, scientists could determine whether the targeted planet has a habitable environment.
“TESS should discover thousands of new exoplanets within two hundred light years of Earth,” Ricker said. “Most of these will be orbiting bright stars, making them ideal targets for characterization observations with NASA’s James Webb Space Telescope.”
“The Webb telescope and other teams will focus on understanding the atmospheres and surfaces of these distant worlds, and someday, hopefully identify the first signs of life outside of our solar system,” Volosin said.
TESS will use four cameras to study sections of the sky’s north and south hemispheres, looking for exoplanets. The cameras would cover about 90 percent of the sky by the end of the mission.
This makes TESS an ideal follow-up to the Kepler mission, which searches for exoplanets in a fixed area of the sky. Because the TESS mission surveys the entire sky, TESS is expected to find exoplanets much closer to Earth, making them easier for further study.
In addition, Ricker said TESS would provide precision, full-frame images for more than 20 million bright stars and galaxies.
“This unique new data will comprise a treasure trove for astronomers throughout the world for many decades to come,” Ricker said.
Now that TESS is cleared to move into the next development stage, it can continue towards its goal of being a key part of NASA’s search for life beyond Earth.
“I’m still hopeful that in my lifetime, we will discover the existence of life outside of our solar system and I’m excited to be part of a NASA mission that serves as a key stepping stone in that search,” Volosin said.
Mathew McConnaughey wades through an ocean on another planet. This is not a fishing expedition. He is out to save his children and all humanity. Image courtesy Paramount.
Science fiction aficionados, take heed. The highly-anticipated movie Interstellar is sharp and gripping. Nolan and cast show in the end that they have the right stuff. Nearly a three hour saga, it holds your attention and keeps you guessing. Only a couple of scenes seemed to drift and lose focus. Interstellar borrows style and substance from some of the finest in the genre and also adds new twists while paying attention to real science. If a science-fiction movie shies away from imagining the unknown, taking its best shot of what we do not know, then it fails a key aspect of making sci-fi. Interstellar delivers in this respect very well.
Jessica Chastain, the grown daughter of astronaut McConnaughey takes a torch to the cornfields. Interstellar viewers are likely to show no sympathy to the ever present corn fields. Image courtesy Paramount.
The movie begins quite unassuming in an oddly green but dusty farmland. It does not rely on showing off futuristic views of Earth and humanity to dazzle us. However, when you see a farming family with a dinner table full of nothing but variations of their cash crop which is known mostly as feedstock for swine and cattle, you know humanity is in some hard times. McConaughey! Save us now! I do not want to live in such a future!
One is left wondering about what got us to the conditions facing humanity from the onset of the movie. One can easily imagine a couple of hot topic issues that splits the American public in two. But Nolan doesn’t try to add a political or religious bent to Interstellar. NASA is in the movie but apparently after decades of further neglect, it is literally a shadow of even its present self.
Somehow, recent science fiction movies — Gravity being one exception — would make us believe that the majority of American astronauts are from the Midwest. Driving a John Deere when you are 12, being raised under big sky or in proximity to the home of the Wright Brothers would make you hell-bent to get out of Dodge and not just see the world but leave the planet. Matthew McConaughey adds to that persona.
Dr. Kip Thorne made it clear that black is not the primary hue of Black Holes. His guidance offered to Nolan raised science fiction to a new level. Image courtesy Paramount.
We are seemingly in the golden age of astronomy. At present, a science fiction movie with special effects can hardly match the imagery that European and American astronomy is delivering day after day. There is one of our planets that gets a very modest delivery in Interstellar. An undergraduate graphic artist could take hold of NASA imagery and outshine those scenes quite easily. However, it appears that Nolan did not see it necessary to out-do every scene of past sci-fi or every astronomy picture of the day (APOD) to make a great movie.
Nolan drew upon American astro-physicist Dr. Kip Thorne, an expert on Einstein’s General Relativity, to deliver a world-class presentation of possibly the most extraordinary objects in our Universe – black holes. It is fair to place Thorne alongside the likes of Sagan, Feynman, Clarke and Bradbury to advise and deliver wonders of the cosmos in compelling cinematic form. In Instellar, using a black hole in place of a star to hold a planetary system is fascinating and also a bit unbelievable. Whether life could persist in such a system is a open question. There is one scene that will distress most everyone in and around NASA that involves the Apollo Moon landings and one has to wonder if Thorne was pulling a good one on old NASA friends.
Great science fiction combines a vision of the future with a human story. McConaughey and family are pretty unassuming. John Lithgow, who plays grandpa, the retired farmer, doesn’t add much and some craggy old character actor would have been just fine. Michael Cane as the lead professor works well and Cane’s mastery is used to thicken and twist the plot. His role is not unlike the one in Children of Men. He creates bends in the plot that the rest of the cast must conform to.
There was one piece of advice I read in previews of Interstellar. See it in Imax format. So I ventured over to the Imax screening at the Technology Museum in Silicon Valley. I think this advice was half correct. The Earthly scenes gained little or nothing from Imax but once they were in outer space, Imax was the right stuff. Portraying a black hole and other celestial wonders is not easy for anyone including the greatest physicists of our era and Thorne and Nolan were right to use Imax format.
According to industry insiders, Nolan is one of a small group of directors with the clout to demand film recording rather than digital. Director Nolan used film and effects to give Interstellar a very earthy organic feel. That worked and scenes transitioned pretty well to the sublime of outer space. Interstellar now shares the theaters with another interesting movie with science fiction leanings. The Stephen Hawking biography, “The Theory of Everything” is getting very good reviews. They hold different ties to science and I suspect sci-fi lovers will be attracted to seeing both. With Interstellar, out just one full day and I ran into moviegoers that had already seen it more than once.
Where does Interstellar stand compared to Stanley Kubricks works? It doesn’t make that grade of science fiction that stands up as a century-class movie. However, Thorne’s and Nolan’s accounting of black holes and worm holes and the use of gravity is excellent. Instellar makes a 21st Century use of gravity in contrast to Gravity that was stuck in the 20th Century warning us to be careful where you park your space vehicle. In the end, Matthew McConaughey serves humanity well. Anne Hathaway plays a role not unlike Jody Foster in Contact – an intellectual but sympathetic female scientist.
Jessica Chastain playing the grown up daughter of McConaughey brings real angst and an edge to the movie; even Mackenzie Foy playing her part as a child. Call it the view ports for each character – they are short and narrow and Chastain uses hers very well. Matt Damon shows up in a modest but key role and does not disappoint. Nolan’s directing and filmography is impressive, not splashy but one is gripped by scenes. Filming in the small confines of spaceships and spacesuits is challenging and Nolan pulls it off very well. Don’t miss Interstellar in the theaters. It matches and exceeds the quality of several recent science fiction movies. Stepping back onto the street after the movie, the world seemed surprisingly comforting and I was glad to be back from the uncertain future Nolan created.
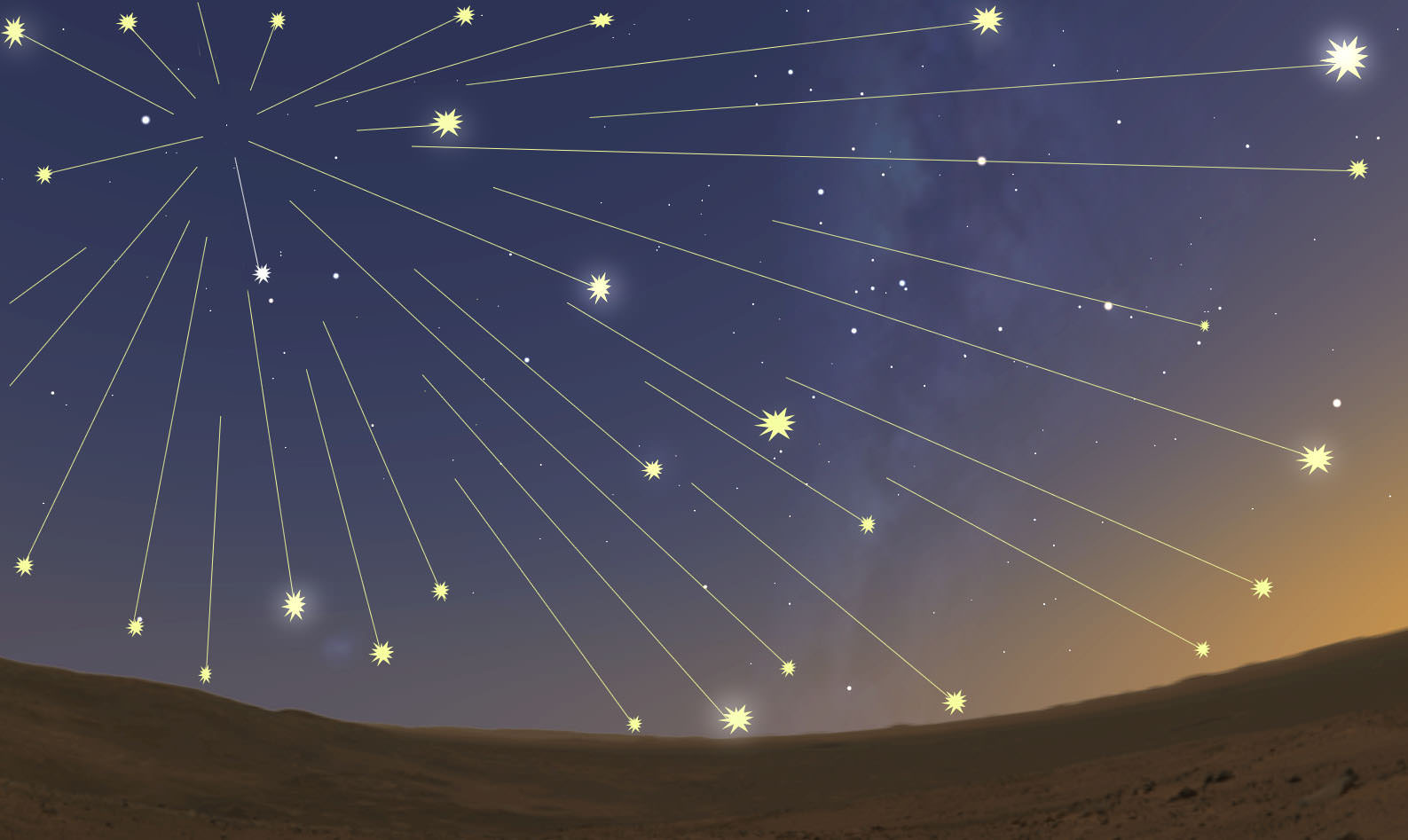
We can only imagine what the meteor storm from Comet Siding Spring must have looked like standing on the surface of Mars on October 19, 2014. NASA scientists announced today that the planet experienced an exceptional shower during the comet's flyby, saturating the sky. Source: Stellarium
“Thousands of meteors per hour would have been visible — truly astounding to the human eye.” That’s Nick Schneider’s description of what you and I would have seen standing on Mars during Comet Siding Spring’s close flyby last month. “It would have been really mind-blowing,” he added. Schneider is instrument lead for MAVEN’s Imaging Ultraviolet Spectrograph (IUVS).
He and a group of scientists who work as lead investigators for instruments on the MAVEN and Mars Reconnaissance Orbiter (MRO) spacecraft shared the latest results from the comet flyby during a media teleconference earlier today. There were many surprises. Would we expect anything less from a comet?
Here’s a summary of the results:
A very dusty ice ball – The comet’s dust tail and the amount of dust in its coma were much larger than expected, prompting Jim Green, director of NASA’s Planetary Science Division in Washington, to remark: “It makes me very happy we hid them (the spacecraft) on the backside of Mars. That really saved them.” Siding Spring dumped several tons of fine dust into the Martian atmosphere prompting a spectacular meteor shower and possibly causing a yellow, twilight afterglow above the Curiosity landing site from vaporizing sodium atoms contained in the minerals. That, and dust in the mid-levels of the atmosphere at the time contributed to the rover’s difficulty in getting good photos of the comet itself. Scientists are still examining the images.
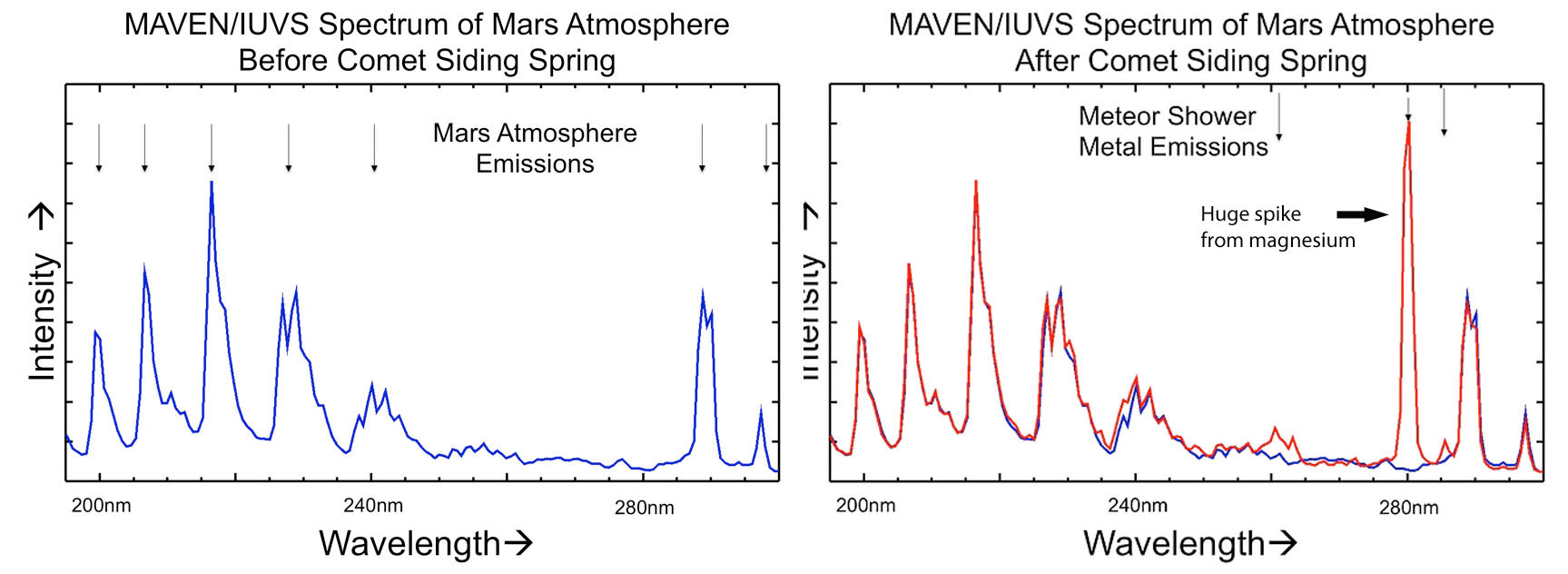
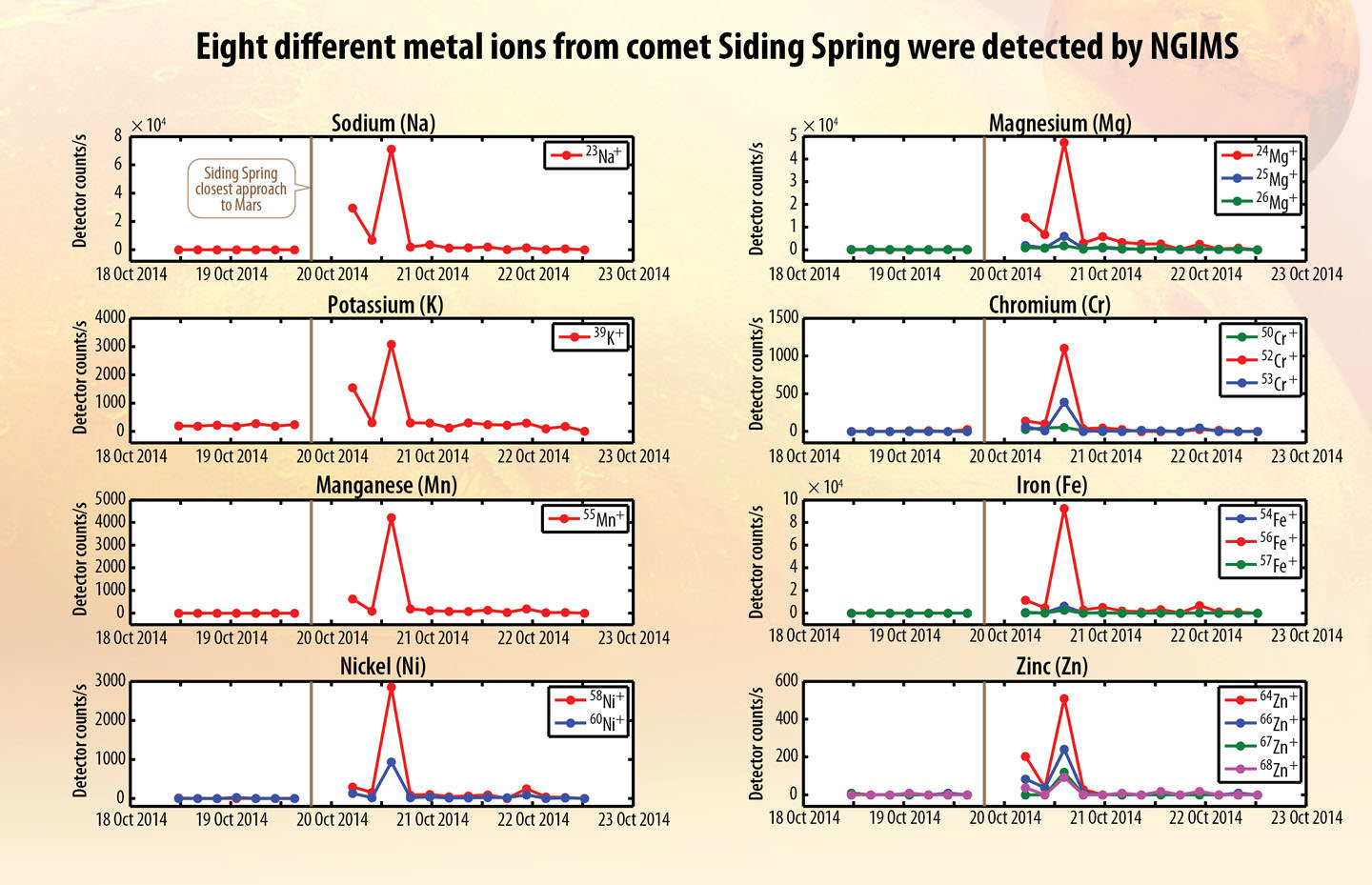
MAVEN’s Ultraviolet Imaging Spectrograph (IUVS) uses limb scans to map the chemical makeup and vertical structure across Mars’ upper atmosphere. It detected strong enhancements of magnesium and iron from ablating incandescing dust from Comet Siding Spring. Credit: NASAI’m not big into graphs either, but check out the heavy metal drama going on here. On the left is the “before” scan from MAVEN’s IUVS instrument; on the right, during the comet’s close approach. The spike in magnesium from vaporizing comet dust is impressive. Ionized magnesium is the strongest spike with neutral and ionized iron on the left in smaller amounts. Both elements are common in meteorites as well as on Earth. Credit: NASAProfiles showing spikes in the amounts of eight different metals over time detected in Mars’ atmosphere by MAVEN’s Neutral Gas and Ion Mass Spectrometer (NGIMS). The emissions faded within a short time, but chemicals from the comet will continue to interact with the Martian atmosphere over time. Credit: NASA
Chemistry of Mars’ atmosphere changed – Dust vaporized in the intense meteor shower produced a striking increase in the amount of magnesium, iron and others metals in Mars’ upper atmosphere. “We were pressed back in our chairs,” said Mike Schneider. The bombardment created a temporary new layer of comet-tainted air and may have acted as condensation nuclei for the formation of high-altitude clouds. MAVEN’s Neutral Gas and Ion Mass Spectrometer (NGIMS) recorded huge spikes in the levels of eight different metals during the comet’s passage and then trailed off a day or so later. “They came to MAVEN as a free sample from no less than an Oort Cloud comet,” said Mehdi Benna, instrument scientist for MAVEN’s Neutral Gas and Ion Mass Spectrometer.
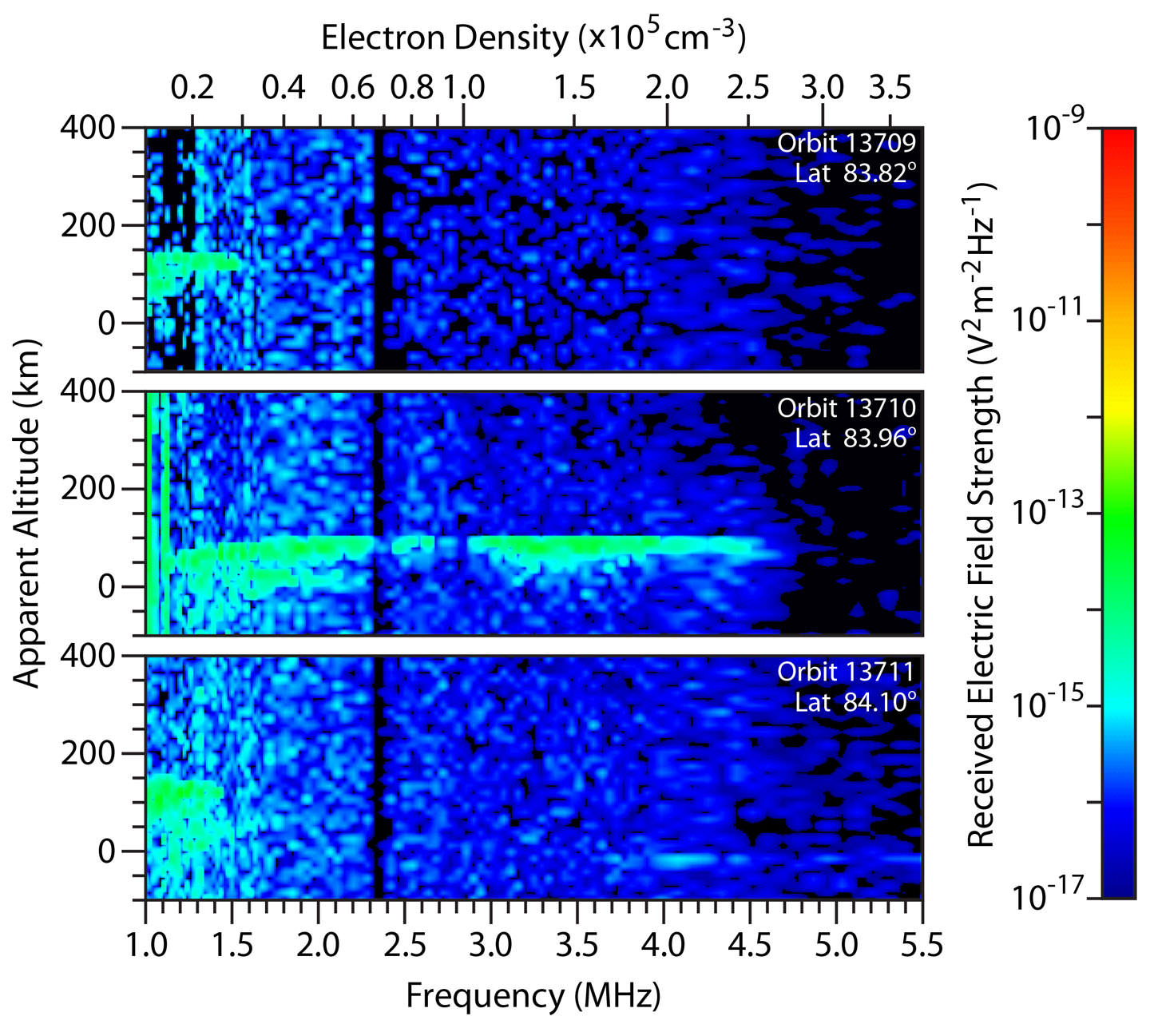
The MARSIS instrument on the Mars Express is a ground penetrating radar sounder used to look for subsurface water and ice. It can also make soundings of the ionosphere. It was used to see the new ionospheric layer formed by vaporizing comet dust on October 19th. Credit: ESAThe Mars Express radar probed the ionosphere (upper atmosphere) at three different times. At top, before the comet arrived; middle, 7 hours later after the comet’s closest approach and bottom, hours later after the comet had departed. The middle graph shows a strong signal (blue horizontal bar) from the creation of a newly-ionized layer of the planet’s lower atmosphere from hot, fast-moving comet dust. Credit: ESA
Flaming comet dust creates new ionospheric layer – Comet dust slamming into the atmosphere at 125,000 mph (56 km/sec) knocked electrons loose from atoms in the thin Martian air 50-60 miles (80-100 km) high, ionizing them and creating a very dense ionization layer in the planet’s lower ionosphere seven hours after the comet’s closest approach. Normally, Mars ionosphere is only seen on the dayside of the planet, but even when the MARSIS instrumenton Mars Express beamed radio waves through the atmosphere on the nightside of the planet, it picked up a very strong signal.
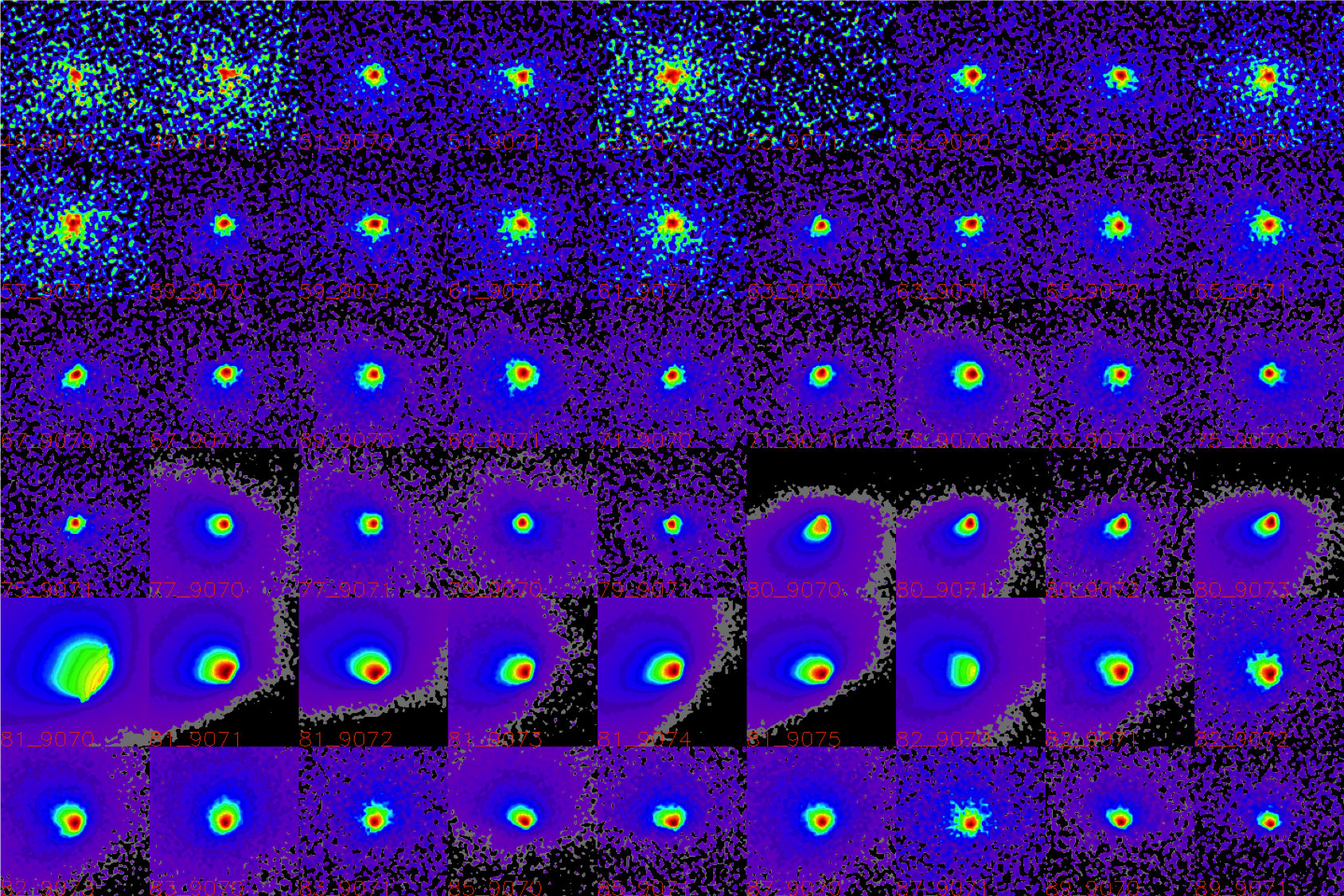
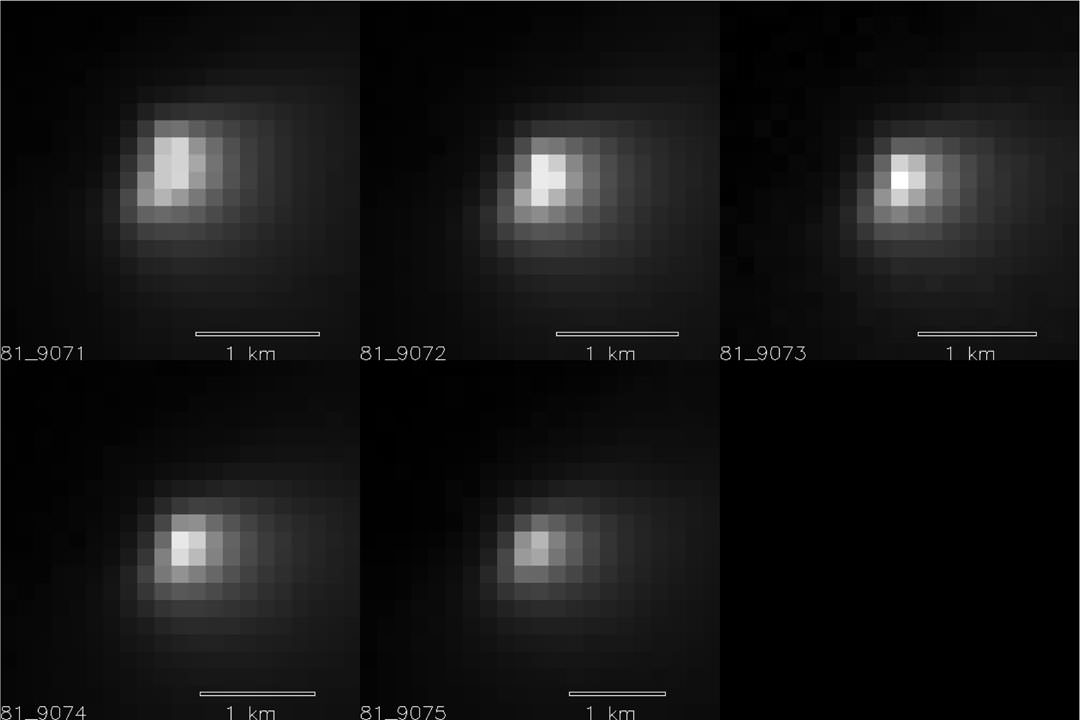
54 red-filtered, false-color images of the comet’s nucleus-coma taken by the MRO’s HiRISE camera show changes in the flow of material leaving the comet. Based on the photos, the comet’s nucleus spins once every 8 hours. Credit: NASAThe five closest photos made with the HiRISE camera show the combined light of the nucleus and coma. Scale is 140-meter per pixel at top and 177-meters at bottom. Scientists will further process these images to separate the nucleus from the coma. Credit: NASA
Nucleus spins once during your work day – Comet Siding Spring’s icy core spins once every 8 hours and its irregular shape causes strong variations in the comet’s brightness. The comet’s size appears less certain – at least for the moment – with estimates anywhere between a few hundred meters to 2 km (1.2 miles). More analysis on images taken by MRO’s HiRISE camera should narrow that number soon.
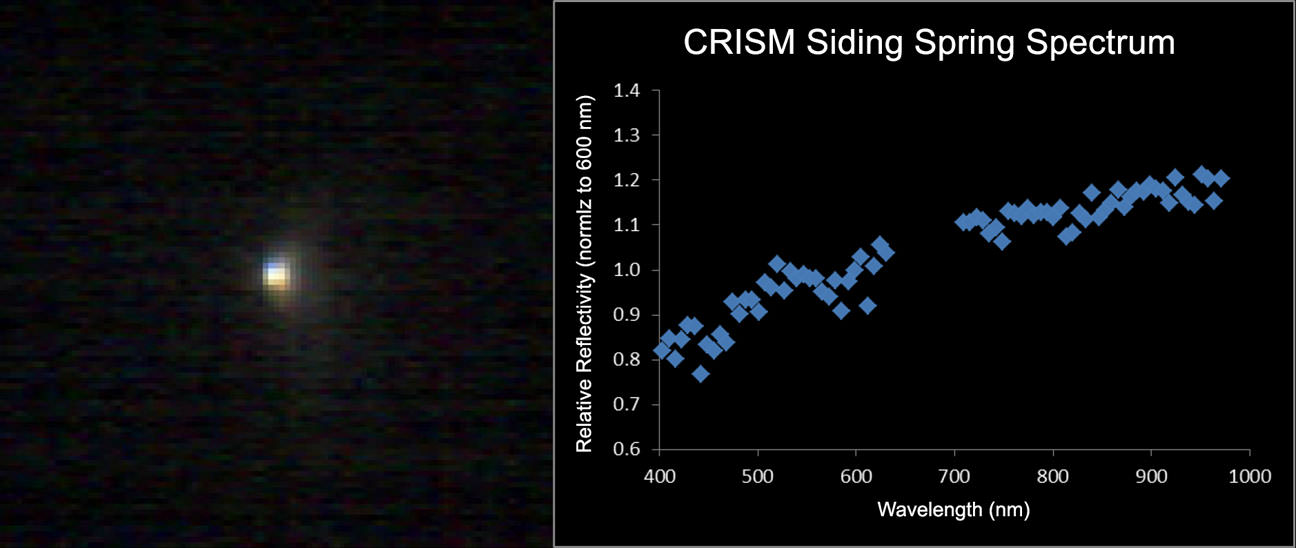
CRISM photo and spectrum of Comet Siding Spring. The spectrum is “flat”, indicating we’re seeing ordinary sunlight reflecting off comet dust. The intriguing color variations in the image tell us the comet’s spewing dust particles of many sizes. Credit: NASA
Dust motes of many sizes – Color variations across Siding Spring’s coma seen by Compact Reconnaissance Imaging Spectrometer for Mars (CRISM) indicate it’s releasing dust particles of different sizes – big and little.
The scientists involved in the encounter couldn’t be happier with how the instruments functioned and the amount of hard data returned. Said Jim Green: “We are so lucky to observe this once-in-a-lifetime event.” How true when you consider that it takes about 8 million years for a comet from the Oort Cloud, that vast reservoir of frozen comets extending nearly a light year from the Sun, to get here in the first place. Nick Schneider put it another way:
“Not only is this a free sample of the Oort Cloud in Mars’ atmosphere, but it gives us a chance to learn more about Mars itself.”
If you’d like to listen in to the hour-long teleconference at any time, it’ll be up for the next week or so HERE.
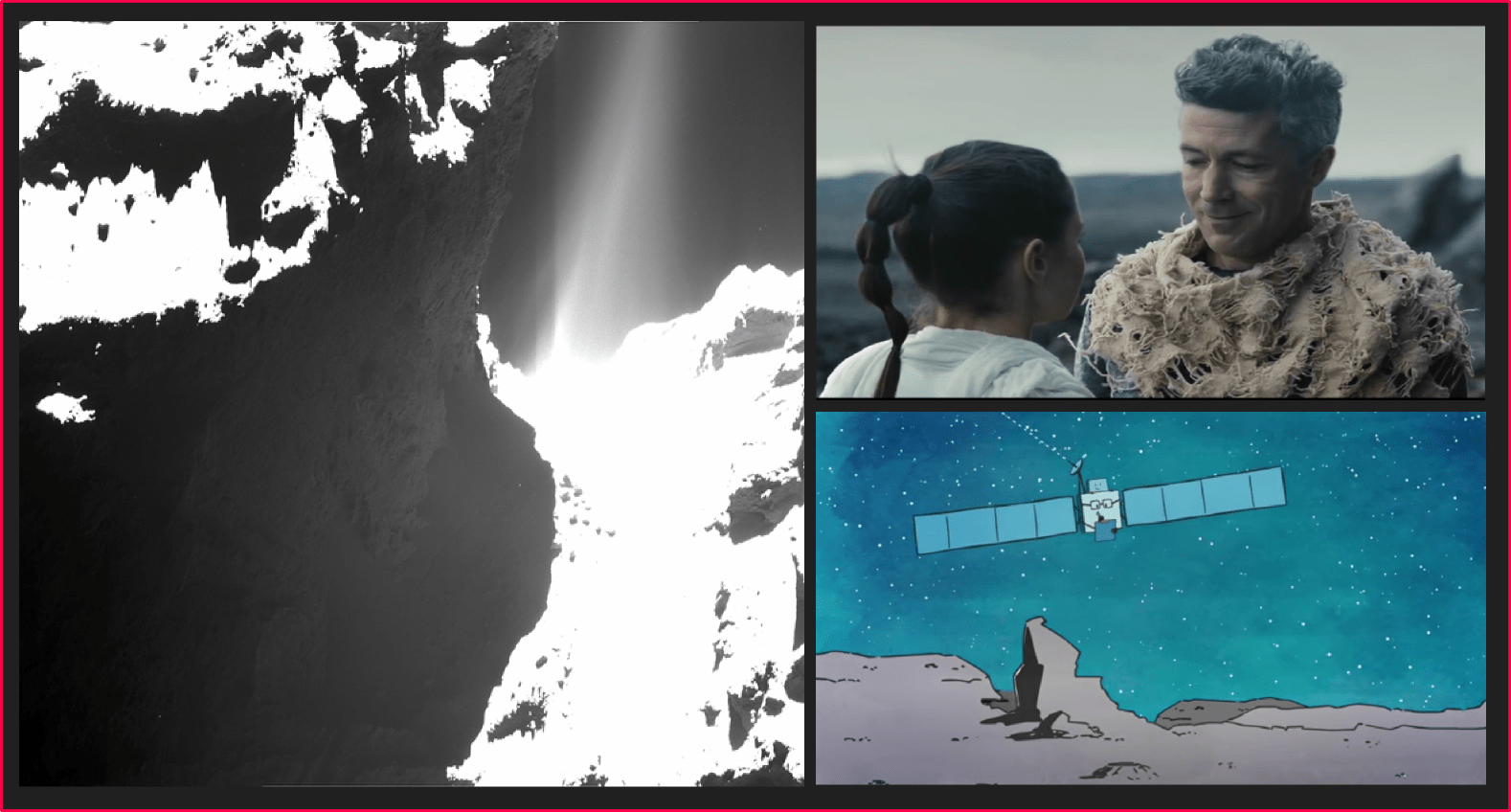
Rosetta, the scientific mission to explore a comet's surface. "Ambition", a short Sci-Fi film, set in the near future, and Rosetta, the children's fable, to encourage the next generations to undertake on the great adventures still to come. (Photo Credits: ESA, Platige Image, ESA Communications)
In the recently released Rosetta short film called “Ambition”, the master begins a story to his apprentice – “Once upon a time.” The apprentice immediately objects to his triteness. But he promises that it is worth the slight tribulation. Who could have imagined ten years ago that Rosetta would become so successful in two such contrasting approaches to telling a tale.
The Rosetta mission is part franchise and part scientific mission. In five days, Rosetta will reach a crossroad, a point of no return as epic as moments in Harry Potter or Lord of the Rings. A small mindless little probe called Philae will be released on a one-way trip to the surface of a comet. Win or lose, Philae will live on in the tale of a comet and a mission to uncover the mysteries of our planet’s formation.
ESA did not promise a good mission as Aidan Gillen promises a good story in Ambition. A space mission is never put in terms of a promise but rather it is thousands of requirements and constraints that formulate a mission plan and a spacecraft design. The European Space Agency put 1 billion Euros ($1.3 billion) to work and did so in what now looks like one of the greatest space missions of the first century of space exploration.
The Rosetta mission is actually two missions in one. There is the comet chaser, the orbiter – Rosetta and then the lander Philae. The design of Rosetta’s objectives is some part, probably in large part, was conceived by dismissing the presence of Philae. Make a space probe to a comet that just orbits the small body. Select your scientific instrumentations accordingly. Now add a small lander to the mission profile that will do something extraordinary – what Rosetta cannot do with its instrumentation. Finally, make sure that Rosetta has everything needed to support Philae’s landing on a comet.
Here is what they have as the game plan on November 12th (the sequence of events begins while its still November 11th in the Americas). These two times are absolutely non- trivial. They are finely tuned to a timepiece called 67P/Churyumov–Gerasimenko. If calculations were made in error, then Philae’s ultimate fate is unknown. Start exactly on time and Philae will be given the best chance at making a successful touchdown on the comet.
Separation of Philae from Rosetta: 09:03 GMT (10:03 CET)
Touchdown on the comet: 16:02 GMT (17:02 CET).
During this time, comet 67P/Churyumov–Gerasimenko will complete over half a rotation on its axis. To be exact, it will rotate 56.2977% of a full rotation. Comet 67P will have its back turned towards Rosetta as it holds the diminutive Philae for the last time and releases Philae for the first and only time.
Now that the ESA, with help from the graphic artists from Platige Image from Poland, has released something entertaining for the science fiction minded among us, they have again released a next episode in their children’s fable of Rosetta and Philae (video below). This cartoon of the final moments of Rosetta and Philae together preparing for the descent which could well be the final moments of Philae.
Philae could fail, crack like an egg on a sharp rock or topple over a cliff or into a crevasse on the surface of 67P. What happens to Philae will make for a Grimm’s fairy tale ending or something we would all prefer. In either case, the ESA is using graphic arts and storytelling to inspire the next generations to join in what our JFK called “great adventures of all time” [ref].
Through a contest something NASA and JPL have used several times to involve the public, the ESA asked the public to come up with a name for the landing site, site J. Out of the thousands of entries, 150 people suggested the name Agilkia [ref]. Alexandre Brouste from France, the designated winner, has been invited to watch the landing activities at Rosetta’s mission control in Darmstadt, Germany. It follows from the Eqyptian theme of the mission’s two probes. “Rosetta” comes from the clay tablet discovered in the 1800s that led to the deciphering of Egyptian hieroglyphics. Philae” is a island on the Nile which held magnificent Eqyptian temples. With the operation of the Aswan dam starting in 1902, the island of Philae was repeatedly flooded and the temple was at risk. UNESCO beginning in 1960 started a project to save the islands historic structures. They were all moved to a nearby Nile island called Agilkia [related U.T. article]. This becomes a part of the Rosetta story – a lander named Philae in reference to the obelisks used along with the Rosetta stone to decipher Eqyptian writings, departing its mother ship on a short but critical voyage to a final resting place, the landing site now called Agilkia.
Upon landing, a landing confirmation signal is expected from Philae via Rosetta at about 8:02 AM PST (11:02 AM EST, 17:02 Central European Time). Alexandre Brouste of France, the designated winner of the landing site naming contest will be in Darmstadt, Germany in mission control to watch the landing unfold with the Rosetta engineers and scientists. Surely, millions of citizens of the European Union and people worldwide will be watching via the World Wide Web.
The timeline and events to unfold as Philae, the lander is released from Rosetta, the comet orbiter. (Illustration Credit: ESA)
Previous Rosetta and Philae articles at Universe Today
Expedition 40 astronauts Reid Wiseman (left) and Alexander Gerst as viewed in a water bubble surrounding a video camera on the International Space Station. Credit: NASA/YouTube (screenshot)
What does the view look like from inside a water bubble? Earlier this year, astronauts on the International Space Station completely submersed a GoPro video recorder inside liquid and filmed the view — which is quite amusing.
Look below for some distorted views of then-Expedition 40 astronauts Reid Wiseman and Alexander Gerst … and an awesome 3-D video besides!
NASA’s goal in tasking the astronauts with this is to better understand how water behaves in space. (It’s actually quite a serious matter, as a lack of understanding of the physics was one factor leading to a dangerous water leak during a spacewalk in 2013.) In this case, the astronauts were looking at how surface tension works in microgravity.
As for that 3-D video, the agency says it is going to offer more of these from space as it gets people even closer to actually being there. Here’s a neat phenomenon: typically the higher radiation levels in space damage video cameras to the extent where they need to be replaced every 8-12 months.
A 3-D camera sent up in 2011, however, had virtually no dead pixels in the images, prompting NASA to investigate. Officials requested the camera come back to Earth on a Dragon splashdown in 2012. That’s when they discovered the way the 3-D camera is structured — with stereo images layered on top of each other — lessens the appearance of any damage.
But there’s also less damage in the first place, NASA said, because the 3-D camera doesn’t use charge-coupled imaging sensors that are susceptible to radiation. The newer system uses a metal-oxide semiconductor sensor, which doesn’t get hurt as badly. We guess that’s more argument for bringing 3-D images from the final frontier.
Expedition 40 commander Steve Swanson (left) and Reid Wiseman view a water bubble surrounding a video camera on the International Space Station in summer 2014. Credit: NASA/YouTube (screenshot)
In this panoramic view taken by NASA's Curiosity Rover on October 19th shortly after local sunset (6:11 p.m.), Comet Siding Spring is the single bright pixel at far upper left. Click for a high resolution version. Credit: NASA/JPL-Caltech/Malin Space Science Systems/James Sorenson
When Comet Siding Spring skimmed just 84,500 miles from Mars last month, NASA’s Opportunity and Curiosity Rovers – along with several orbiting Mars spacecraft – readied their cameras to record the historic flyby. Opportunity’s photos revealed a small, fuzzy blob against the stars of Cetus the Whale, but most of us searched in vain to find any trace of the comet among the blizzard of noise in pictures snapped by Curiosity. Yet it may be there after all.
In this before-and-after animation, you can see how much noise needed to be cleaned from the original photos to uncover the the comet. Credit: NASA/JPL-Caltech/Malin Space Science Systems/James Sorenson
In this panoramic image at top, assembled and processed by James Sorenson to remove the pervasive noise in the original photos, we see with a twilit landscape just after sundown. Look closely in the upper left hand corner and you’ll see a speck of light. That’s it! Combined with positional information, Sorenson tentatively identified that pixel as Comet C/2013 A1 Siding Spring. OK, it’s not much to look at but may be our best candidate for the hoped-for photo from Curiosity.
Comet Siding Spring near Mars in a composite image by the Hubble Space Telescope, capturing their positions between Oct. 18 8:06 a.m. EDT (12:06 p.m. UTC) and Oct. 19 11:17 p.m. EDT (Oct. 20, 3:17 a.m. UTC). Credit: NASA, ESA, PSI, JHU/APL, STScI/AURA
Remember that conditions were far from ideal when the picture was taken. There was considerable dust and haze in the Martian atmosphere over Gale Crater. Dust effectively absorbs and also scatters light. The bright twilight sky only made the comet more difficult to discern. If you’ve ever struggled to see Mercury at dusk on a hazy summer evening, you’ll understand what our robot was up against.
This single image is one of series that were acquired by the HRSC camera on board Mars Express during the comet Siding Spring flyby on October 19, 2014. Click to animate. Credit: ESA/DLR/FU Berlin
The European Space Agency’s Mars Express orbiter also chimed in with a recent set of comet images. As it flew by, Siding Spring was traveling at around 35 miles per second (56 km/sec) relative to Mars. Images were acquired at 17-second intervals at a resolution of 10.5 miles (17 km) per pixel. What do they show? The irregular shape might make you might think you’re seeing the actual shape of the comet’s nucleus. Unfortunately, that’s impossible because it’s less than a kilometer across and each pixel in the photo spans 17 km. Instead, we’re seeing the combined light of the nucleus and extended coma, the surrounding cloud of gas and dust. Why the images are pure black and white with no grey tones is unclear.
Two photos of comet C/2013 A1 Siding Spring taken 37 minutes apart by the CRISM imager when the comet was closest to Mars. The subtle colors seen are likely related to dust grain size or composition. The nucleus itself is not resolved. Credit: NASA/JPL/JHUAPL
Besides the theclose-up photo taken with the HiRISE camera on NASA’s Mars Reconnaissance Orbiter, its Compact Reconnaissance Imaging Spectrometer for Mars (CRISM) got busy photographing the dusty inner coma generated when sunlight warms and vaporizes dust-laden ice in the nucleus. The scale of the left image is approximately 2.5 miles (4 km) per pixel; for the right image, it is about 3 miles (5 km) per pixel.
According to NASA, CRISM observed 107 different wavelengths of light in each pixel. Here, only three colors are shown. Researchers think the appearance of color variations in the inner coma could be due to the properties of the comet’s dust, possibly dust grain size or composition. More photos and results from all the spacecraft will appear in the weeks and months ahead as scientists continue their analyses.
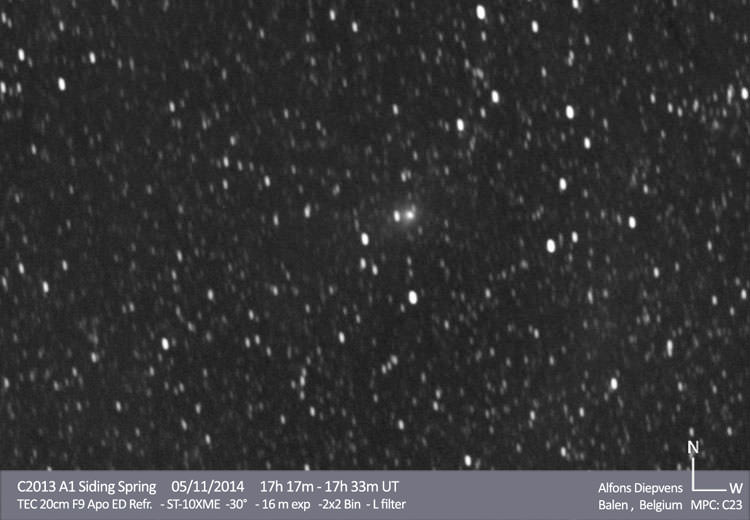
Comet Siding Spring shows a condensed coma and hint of a tail in this photo taken on November 5, 2014. Credit: Alfons Diepvens
Comet Siding Spring has left Mars and its crew of robotic eyes behind as it crawls north into the constellation Serpens low in the southwest at dusk. Amateur astronomers are still keen to photograph it at every opportunity. Recent observations indicate a temporary re-brightening, though the comet remains a dim 11th magnitude object.
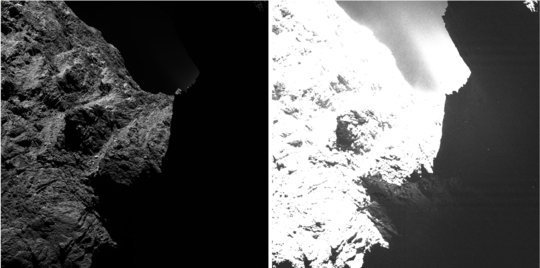
This "dark side" image of Comet 67P/Churyumov-Gerasimenko shows light backscattered from dust particles in the coma surrounding the comet, which helps scientists search for surface features. The picture was taken by the Rosetta spacecraft Sept. 29 from about 19 kilometers (12 miles). Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
How do you see a side of a comet that is usually shrouded in darkness? For the plucky scientists using the Rosetta spacecraft, the answer comes down to using dust to their advantage. They’re trying to catch a glimpse of the shadowed southern side using light scattering from dust particles in anticipation of watching the comet’s activity heat up next year.
Using Rosetta’s OSIRIS (Optical, Spectroscopic, and Infrared Remote Imaging System) instrument, scientists are diligently mapping Comet 67P/Churyumov-Gerasimenko’s surface features as it draws closer to the Sun. Funny enough, the shadowed side will be in full sunlight by the time the comet gets to its closest approach. This gives scientists more incentive to see what it looks like now.
The comet side is in shadow because its is not perpendicular to its orbital plane, the Max Planck Institute for Solar System Research stated. This means that areas of the comet can stay in shadow for months at a time. But using OSIRIS’ powerful receptors, scientists can get a few hints about what those surface features are, using dust scattering.
Playing with saturation levels in these images, scientists using the Rosetta’s spacecraft imaging system are able to get more information about surface features in the image at right. Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
“For a normal camera, this tiny bit of scattered light would not help very much”, stated OSIRIS team member Maurizio Pajola from the University of Padua in Italy. A normal camera has eight bits per pixel of information (256 shades of gray), while OSIRIS’ 16 bits allow it to distinguish between 65,000 shades. “In this way, OSIRIS can see black surfaces darker than coal together with white spots as bright as snow in the same image,” he added.
The scientists were not specific in a press release about what they are seeing so far, but they said that in May 2015 they expect to get a lot more data very quickly — once the area goes into full sunlight.
Rosetta, a mission of the European Space Agency, has been orbiting the comet since August. Next Wednesday it will release a lander, Philae, that will attempt to make the first soft landing on a comet’s surface.
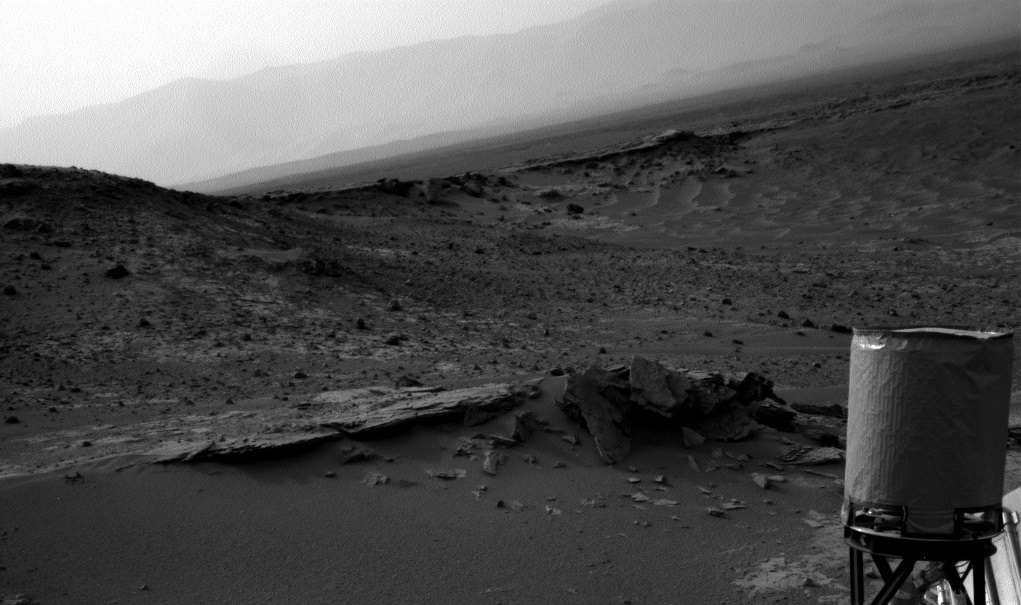
A view from the Curiosity rover on Sol 794 (Oct. 31, 2014) from its outpost at the base of Mount Sharp (Aeolis Mons). Credit: NASA/JPL-Caltech
NASA’s Curiosity rover has struck hematite — an iron-oxide mineral often associated with water-soaked environments — in its first drill hole inside the huge Mount Sharp (Aeolis Mons) on Mars. While in this case oxidization is more important to its formation, the sample’s oxidization shows that the area had enough chemical energy to support microbes, NASA said.
Hematite is not a new discovery for Curiosity or Mars rovers generally, but what excites scientists is this confirms observations from the Mars Reconnaissance Orbiter that spotted hematite from orbit in the Pahrump Hills, the area that Curiosity is currently roving.
“This connects us with the mineral identifications from orbit, which can now help guide our investigations as we climb the slope and test hypotheses derived from the orbital mapping,” stated John Grotzinger, Curiosity project scientist at the California Institute of Technology in Pasadena.
This is the latest in a series of finds for the rover related to habitability. In December 2013, scientists announced it found a zone (dubbed Yellowknife Bay) that was likely an ancient lakebed. But Yellowknife’s mineralogy eluded detection from orbit, likely due to dust covering the rocks.
Photo mosaic shows NASA’s Curiosity Mars rover in action reaching out to investigate rocks at a location called Yellowknife Bay on Sol 132, Dec 19, 2012, in search of first drilling target. The view is reminiscent of a dried up shoreline. Curiosity’s navigation camera captured the scene surrounding the rover with the arm deployed and the APXS and MAHLI science instruments on tool turret collecting microscopic imaging and X-ray spectroscopic data. The mosaic is colorized. See the full 360 degree panoramic and black & white versions below. Credit: NASA/JPL-Caltech/Ken Kremer/Marco Di Lorenzo
Hematite is perhaps most closely associated with spherical rocks called “blueberries” that the Opportunity rover discovered on Mars in 2004. While Opportunity’s discovery showed clear evidence of water, the new Curiosity find is more closely associated with oxidization, NASA said.
The new find, contained in a pinch of dust analyzed in Curiosity’s internal Chemistry and Mineralogy (CheMin) instrument, yielded 8% and 4% magnetite. The latter mineral is one way that hematite can be created, should magnetite be placed in “oxidizing conditions”, NASA stated. Previous samples en route to Mount Sharp had concentrations only as high as 1% hematite, but more magnetite. This shows more oxidization took place in this new sample, NASA stated.
Curiosity will likely stick around Pahrump Hills for at least weeks, perhaps months, until it climbs further up the mountain. Among Mount Sharp’s many layers is one that contains so much hematite (as predicted from orbit) that NASA calls it “Hematite Ridge.”