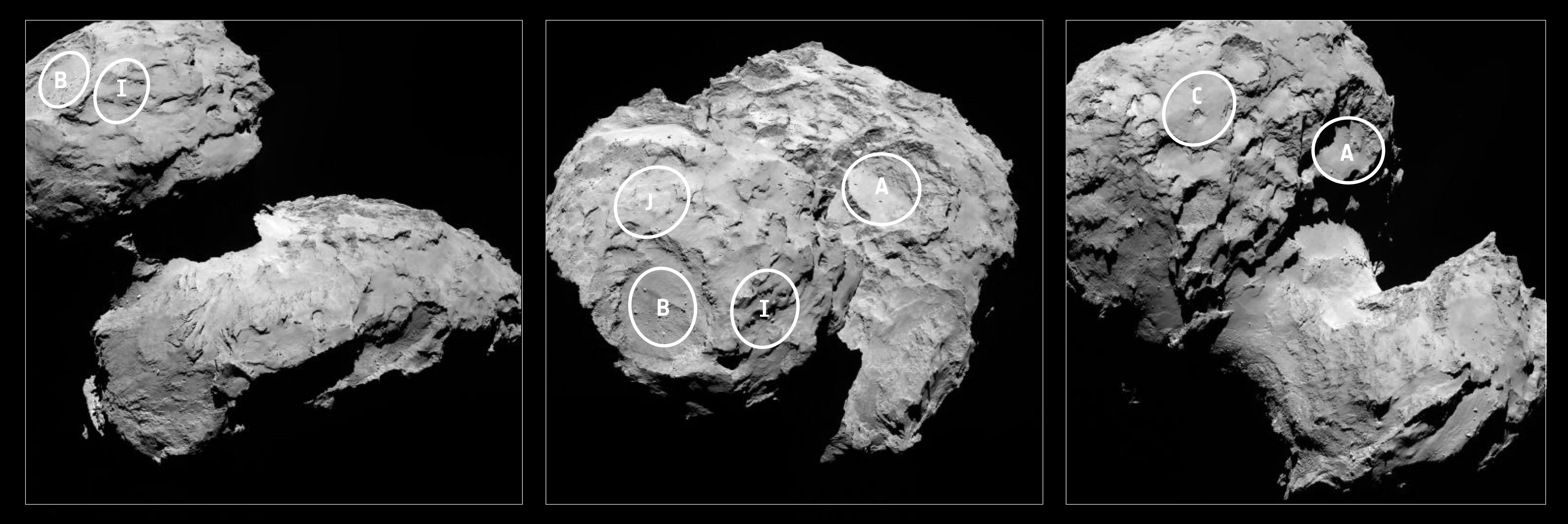
Four-image photo mosaic comprising images taken by Rosetta's navigation camera on 31 August 2014 from a distance of 61 km from comet 67P/Churyumov-Gerasimenko. The mosaic has been contrast enhanced to bring out details. The comet nucleus is about 4 km across. Credits: ESA/Rosetta/NAVCAM/Ken Kremer/Marco Di Lorenzo
Four-image photo mosaic comprising images taken by Rosetta’s navigation camera on 31 August 2014 from a distance of 61 km from comet 67P/Churyumov-Gerasimenko. The mosaic has been contrast enhanced to bring out details. The comet nucleus is about 4 km across.
Credits: ESA/Rosetta/NAVCAM/Ken Kremer – kenkremer.com/Marco Di Lorenzo
See rotated version and 4 individual images below[/caption]
ESA’s Rosetta orbiter has now moved in so close to its comet quarry that the primordial body overwhelms the screen, and thus its snapping mapping mosaics to capture the complete scene of the bizarre world so it can find the most suitable spot for the momentous Philae landing – upcoming in mid-November.
In fact Rosetta has ‘drawn and quartered’ the comet to collect high resolution views of Comet 67P/Churyumov-Gerasimenko with the navcam camera on Sunday, August 31.
The navcam quartet has just been posted to the Rosetta portal today, Monday, September 1, 2014. ESA invited readers to create global photo mosaics.
See above our four frame photo mosaic of navcam images Rosetta took on Aug. 31.
The purpose of taking the images as well as spectra and physical measurements up close is to find a ‘technically feasible’ Philae touchdown site that is both safe and scientifically interesting.
Below is the Rosetta teams four image navcam montage, arranged individually in a 2 x 2 raster.
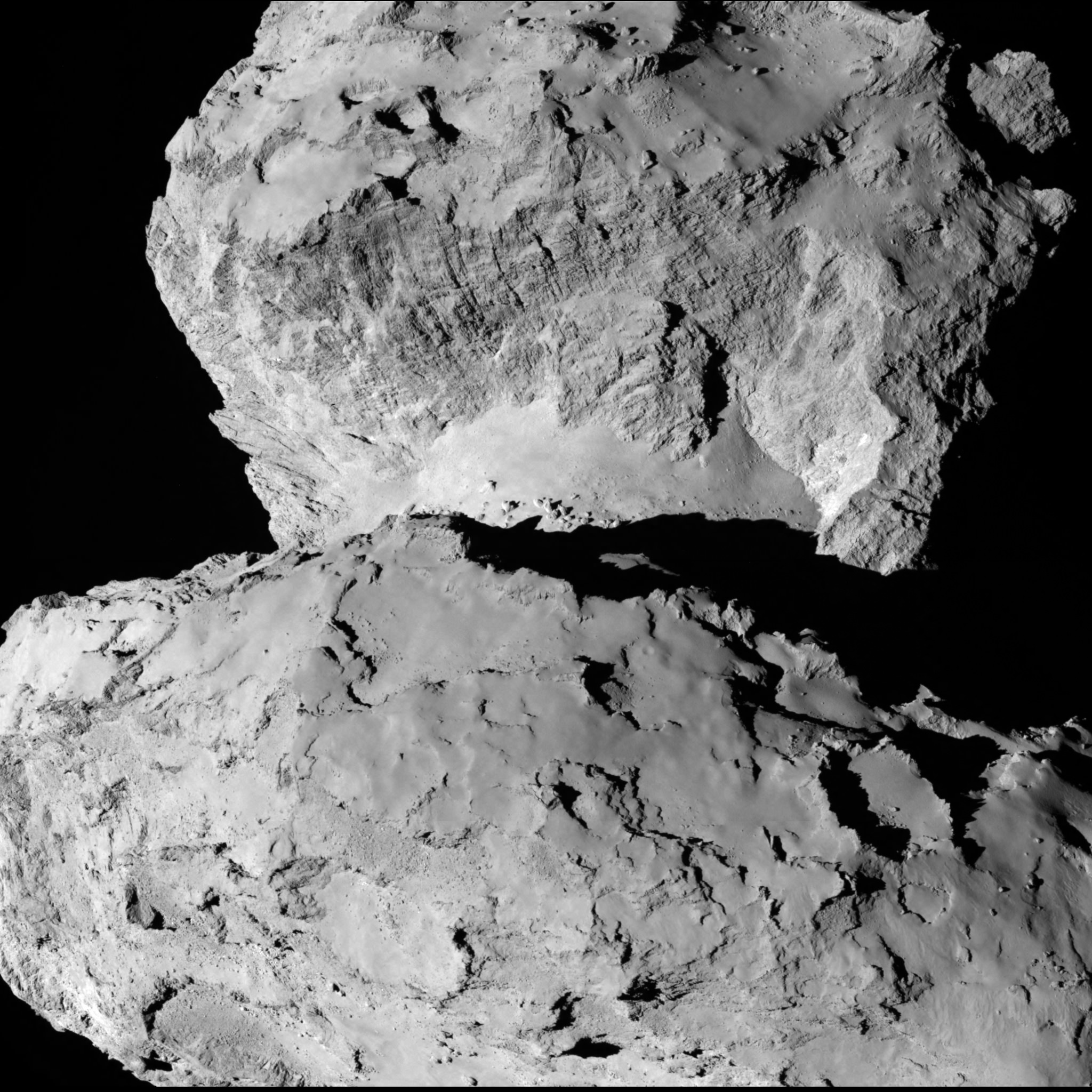
Four-image montage comprising images taken by Rosetta’s navigation camera on 31 August 2014 from a distance of 61 km from comet 67P/Churyumov-Gerasimenko. The comet nucleus is about 4 km across. Credits: ESA/Rosetta/NAVCAM
The navcam image raster sequence was taken from a distance of 61 km from comet 67P.
“Roughly one quarter of the comet is seen in the corner of each of the four images. The four images are taken over an approximately 20 minute period, meaning that there is some motion of the spacecraft and rotation of the comet between the images. As a result, making a clean mosaic out of the four images is not simple,” according to ESA’s Rosetta blog.
As I reported here last week, the ‘Top 5’ landing site candidates have been chosen for the Rosetta orbiters piggybacked Philae lander for humankind’s first attempt to land on a comet.
The potential touchdown sites were announced on Aug. 25, based on a thorough analysis of high resolution measurements collected by ESA’s Rosetta spacecraft over the prior weeks since it arrived at the pockmarked Comet 67P/Churyumov-Gerasimenko on Aug. 6, 2014.
See our montage of the ‘Top 5’ landing sites below.
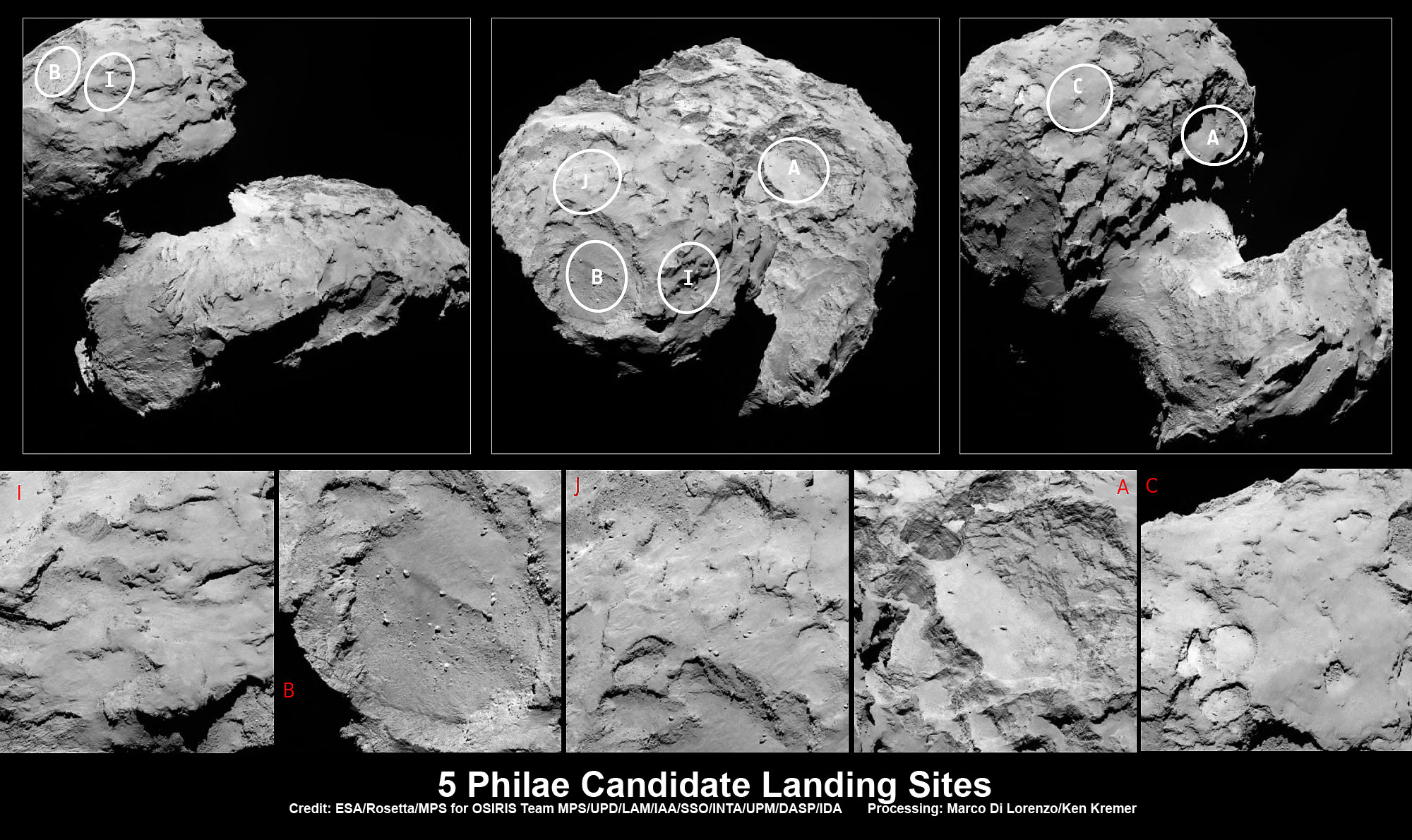
Five candidate sites were identified on Comet 67P/Churyumov-Gerasimenko for Rosetta’s Philae lander. The approximate locations of the five regions are marked on these OSIRIS narrow-angle camera images taken on 16 August 2014 from a distance of about 100 km. Enlarged insets below highlight 5 landing zones. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Processing: Marco Di Lorenzo/Ken Kremer
Rosetta is a mission of many firsts, including history’s first ever attempt to orbit a comet for long term study.
Philae’s history making landing on comet 67P is currently scheduled for around Nov. 11, 2014, and will be entirely automatic. The 100 kg lander is equipped with 10 science instruments.
The new images released today are the best taken so far by the Navcam camera. The probes OSIRIS science camera are even more detailed, and will hopefully be released by ESA soon!
“This is the first time landing sites on a comet have been considered,” said Stephan Ulamec, Lander Manager at DLR (German Aerospace Center), in an ESA statement.
Since rendezvousing with the comet after a decade long chase of over 6.4 billion kilometers (4 Billion miles), a top priority task for the science and engineering team leading Rosetta has been “Finding a landing strip” for the Philae comet lander.
“The clock is ticking’ to select a suitable landing zone soon since the comet warms up and the surface becomes ever more active as it swings in closer to the sun and makes the landing ever more hazardous.
This image of comet 67P/Churyumov-Gerasimenko shows the diversity of surface structures on the comet’s nucleus. It was taken by the Rosetta spacecraft’s OSIRIS narrow-angle camera on August 7, 2014. At the time, the spacecraft was 65 miles (104 kilometers) away from the 2.5 mile (4 kilometer) wide nucleus. Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA/Enhanced processing Marco Di Lorenzo/Ken Kremer
The three-legged lander will fire two harpoons and use ice screws to anchor itself to the 4 kilometer (2.5 mile) wide comet’s surface. Philae will collect stereo and panoramic images and also drill 23 centimeters into and sample its incredibly varied surface.
Stay tuned here for Ken’s continuing Rosetta, Earth and Planetary science and human spaceflight news.
Four-image photo mosaic comprising images taken by Rosetta’s navigation camera on 31 August 2014 from a distance of 61 km from comet 67P/Churyumov-Gerasimenko. The mosaic has been rotated and contrast enhanced to bring out details. The comet nucleus is about 4 km across. Credits: ESA/Rosetta/NAVCAM/Ken Kremer/Marco Di LorenzoESA’s Rosetta spacecraft on final approach to Comet 67P/Churyumov-Gerasimenko in early August 2014. This collage of navcam imagery from Rosetta was taken on Aug. 1, 2, 3 and 4 from distances of 1026 km, 500 km, 300 km and 234 km. Not to scale. Credit: ESA/Rosetta/NAVCAM – Collage/Processing: Marco Di Lorenzo/Ken Kremer- kenkremer.com
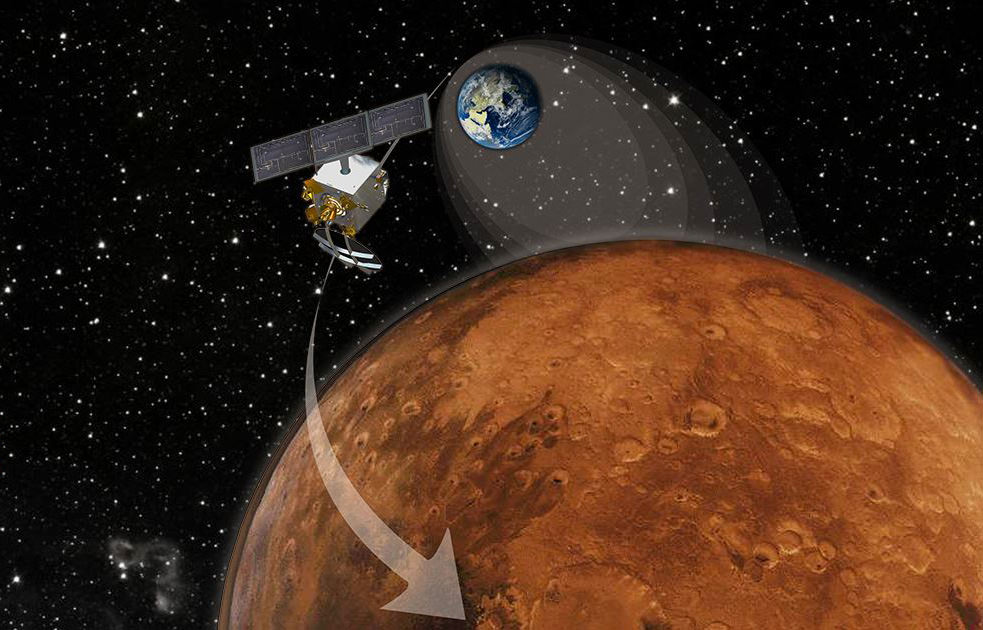
India’s Mars Orbiter Mission (MOM) marked 100 days out from Mars on June 16, 2014 and the Mars Orbit Insertion engine firing when it arrives at the Red Planet on September 24, 2014 after its 10 month interplanetary journey. Credit ISRO
Now less than 25 days from her history making rendezvous with the Red Planet and the critical Mars Orbital Insertion (MOI) engine firing, India’s MOM is in good health!
The Mars Orbiter Mission, or MOM, counts as India’s first interplanetary voyager and the nation’s first manmade object to orbit the 4th rock from our Sun on September 24, 2014 – if all goes well.
MOM was designed and developed by the Indian Space Research Organization (ISRO).
“MOM and its payloads are in good health,” reports ISRO in a new update.
As of today, Aug. 31, MOM has traveled a total distance of over 622 million km in its heliocentric arc towards Mars, says ISRO. It is currently 199 million km away from Earth.
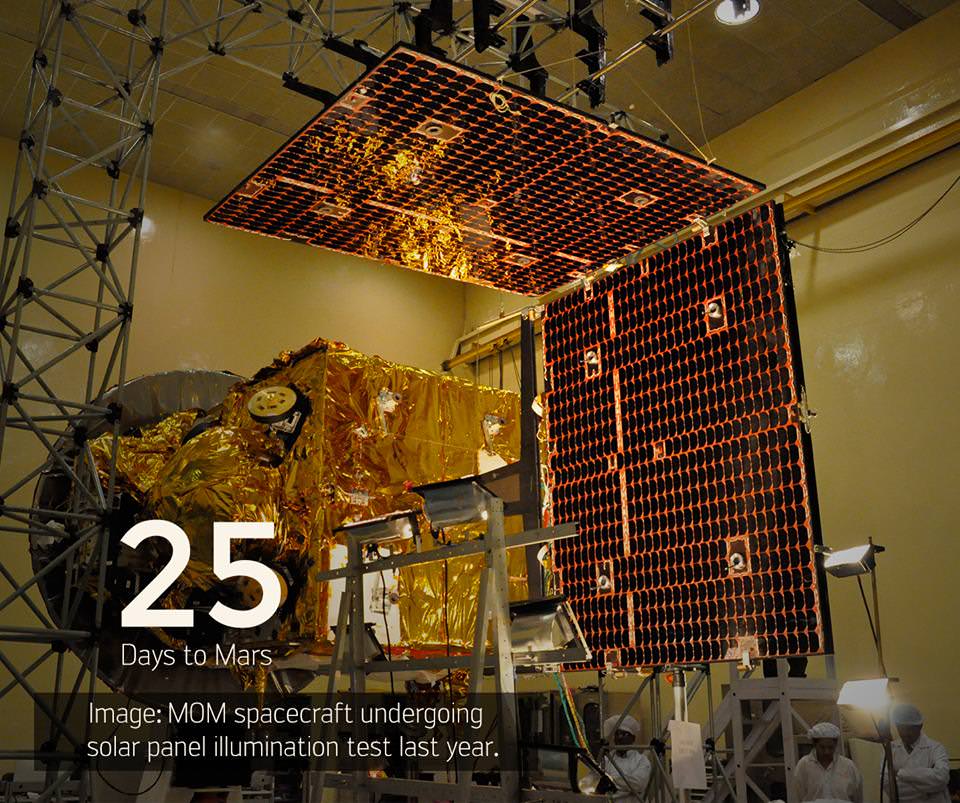
25 Days to Mars Orbit Insertion engine firing for ISRO’s Mars Orbiter Mission (MOM) on Sept. 24, 2014. Prelaunch images show MOM undergoing solar panel illumination tests during 2013 prior to launch. Credit: ISRO
Altogether the probe has completed over 90% of the journey to Mars.
In the past week alone it has traveled over 20 million km and is over 10 million km further from Earth. It is now less than 9 million kilometers away from Mars
Round trip radio signals communicating with MOM now take some 21 minutes.
The 1,350 kilogram (2,980 pound) probe has been streaking through space for nearly ten months.
To remain healthy and accomplish her science mission ahead, the spacecraft must fire the 440 Newton liquid fueled main engine to brake into orbit around the Red Planet on September 24, 2014 – where she will study the atmosphere and sniff for signals of methane.
The do or die MOI burn on September 24, 2014 places MOM into an 377 km x 80,000 km elliptical orbit around Mars.
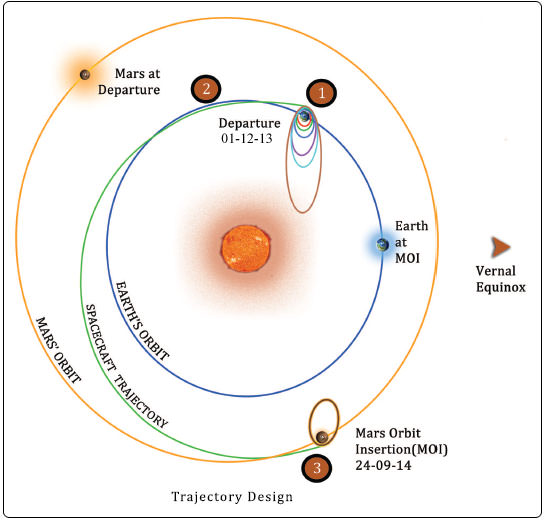
Trans Mars Injection (TMI), carried out on Dec 01, 2013 at 00:49 hrs (IST) moved the spacecraft into the Mars Transfer Trajectory (MTT). With TMI the Earth orbiting phase of the spacecraft ended and the spacecraft is now on a course to encounter Mars after a journey of about 10 months around the Sun. Credit: ISRO
MOM was launched on Nov. 5, 2013 from India’s spaceport at the Satish Dhawan Space Centre, Sriharikota, atop the nations indigenous four stage Polar Satellite Launch Vehicle (PSLV) which placed the probe into its initial Earth parking orbit.
MOM is streaking to Mars along with NASA’s MAVEN orbiter, which arrives a few days earlier on September 21, 2014.
Although MOM’s main objective is a demonstration of technological capabilities, she will also study the planet’s atmosphere and surface.
The probe is equipped with five indigenous instruments to conduct meaningful science – including a tri color imager (MCC) and a methane gas sniffer (MSM) to study the Red Planet’s atmosphere, morphology, mineralogy and surface features. Methane on Earth originates from both geological and biological sources – and could be a potential marker for the existence of Martian microbes.
Stay tuned here for Ken’s continuing MOM, MAVEN, Rosetta, Opportunity, Curiosity, Mars rover and more Earth and planetary science and human spaceflight news.
Clouds on the ground ! The sky seems inverted for a moment ! Blastoff of India’s Mars Orbiter Mission (MOM) on Nov. 5, 2013 from the Indian Space Research Organization’s (ISRO) Satish Dhawan Space Centre SHAR, Sriharikota. Credit: ISRO
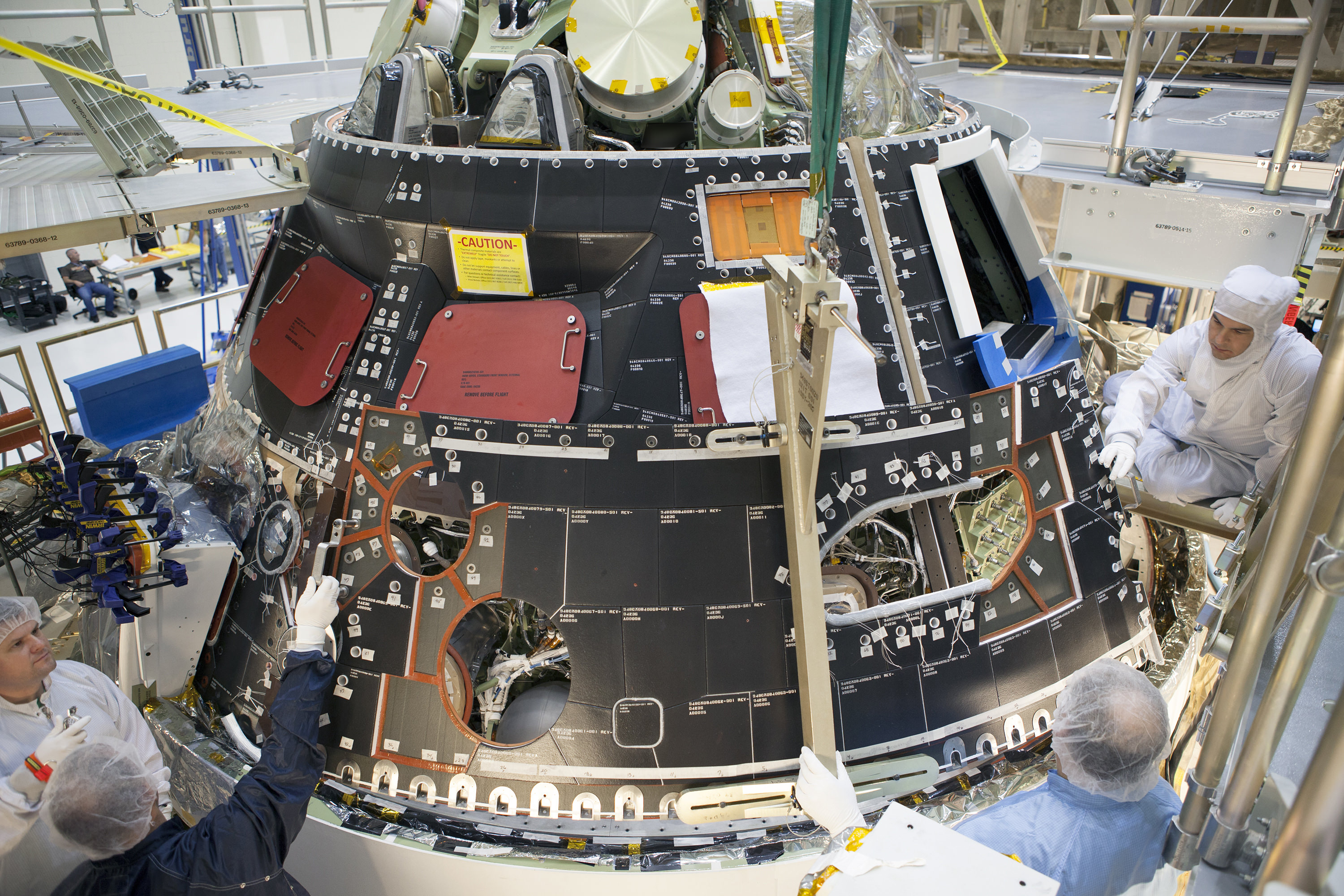
Inside the Operations and Checkout Building high bay at NASA's Kennedy Space Center in Florida, technicians dressed in clean-room suits install a back shell tile panel onto the Orion crew module. Credit: NASA/Dimitri Gerondidakis
Fabrication of the pathfinding version of NASA’s Orion crew capsule slated for its inaugural unmanned test flight in December is entering its final stages at the Kennedy Space Center (KSC) launch site in Florida.
Engineers and technicians have completed the installation of Orion’s back shell panels which will protect the spacecraft and future astronauts from the searing heat of reentry and scorching temperatures exceeding 3,150 degrees Fahrenheit.
Orion is scheduled to launch on its maiden uncrewed mission dubbed Exploration Flight Test-1 (EFT-1) test flight in December 2014 atop the mammoth, triple barreled United Launch Alliance (ULA) Delta IV Heavy rocket from Cape Canaveral, Florida.
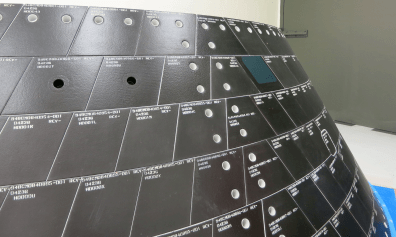
Inside the Operations and Checkout Building high bay at NASA’s Kennedy Space Center in Florida, technicians dressed in clean-room suits have installed a back shell tile panel onto the Orion crew module and are checking the fit next to the middle back shell tile panel. Preparations are underway for Exploration Flight Test-1, or EFT-1. Credit: NASA/Dimitri Gerondidakis
The cone-shaped back shell actually has a rather familiar look since its comprised of 970 black thermal protection tiles – the same tiles which protected the belly of the space shuttles during three decades and 135 missions of returning from space.
However, Orion’s back shell tiles will experience temperatures far in excess of those from the shuttle era. Whereas the space shuttles traveled at 17,000 miles per hour, Orion will hit the Earth’s atmosphere at some 20,000 miles per hour on this first flight test.
The faster a spacecraft travels through Earth’s atmosphere, the more heat it generates. So even though the hottest the space shuttle tiles got was about 2,300 degrees Fahrenheit, the Orion back shell could get up to 3,150 degrees, despite being in a cooler area of the vehicle.
Engineers have also rigged Orion to conduct a special in flight test to see just how vulnerable the vehicle is to the onslaught of micrometeoroid orbital debris.
Two one-inch-wide holes have been drilled into tiles on Orion’s back shell to simulate micrometeoroid orbital debris damage. Sensors on the vehicle will record how high temperatures climb inside the hole during Orion’s return through Earth’s atmosphere following its first flight in December. Credit: NASA
Even tiny particles can cause immense and potentially fatal damage at high speed by punching a hole through the back shell tiles and possibly exposing the spacecrafts structure to temperatures high than normal.
“Below the tiles, the vehicle’s structure doesn’t often get hotter than about 300 degrees Fahrenheit, but if debris breeched the tile, the heat surrounding the vehicle during reentry could creep into the hole it created, possibly damaging the vehicle,” says NASA.
The team has run done numerous modeling studies on the effect of micrometeoroid hits. Now it’s time for a real world test.
Therefore engineers have purposely drilled a pair of skinny 1 inch wide holes into two 1.47 inches thick tiles to mimic damage from a micrometeoroid hit. The holes are 1.4 inches and 1 inch deep and are located on the opposite side of the back shell from Orion’s windows and reaction control system jets, according to NASA.
“We want to know how much of the hot gas gets into the bottom of those cavities,” said Joseph Olejniczak, manager of Orion aerosciences, in a NASA statement.
“We have models that estimate how hot it will get to make sure it’s safe to fly, but with the data we’ll gather from these tiles actually coming back through Earth’s atmosphere, we’ll make new models with higher accuracy.”
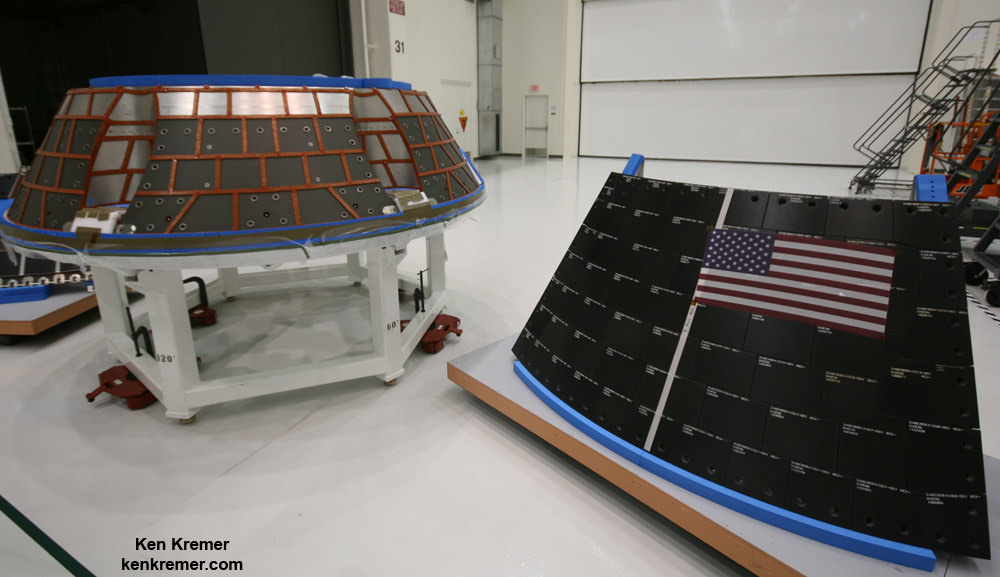
Orion crew module back shell tiles and panels inside the Neil Armstrong Operations and Checkout Building high bay at the Kennedy Space Center in Florida. Credit: Ken Kremer – kenkremer.com
The data gathered will help inform the team about the heat effects from potential damage and possible astronaut repair options in space.
Orion is NASA’s next generation human rated vehicle now under development to replace the now retired space shuttle.
The state-of-the-art spacecraft will carry America’s astronauts on voyages venturing farther into deep space than ever before – past the Moon to Asteroids, Mars and Beyond!
The two-orbit, four and a half hour EFT-1 flight will lift the Orion spacecraft and its attached second stage to an orbital altitude of 3,600 miles, about 15 times higher than the International Space Station (ISS) – and farther than any human spacecraft has journeyed in 40 years.
The EFT-1 mission will test the systems critical for future human missions to deep space.
Orion’s back shell attachment and final assembly is taking place in the newly renamedNeil Armstrong Operations and Checkout Building, by prime contractor Lockheed Martin.
Inside the Operations and Checkout Building high bay at the Kennedy Space Center, Fl, technicians on work platform monitor progress as crane lowers the middle back shell tile panel for installation on the Orion crew module. Credit: NASA/Dimitri Gerondidakis
One of the primary goals of NASA’s eagerly anticipated Orion EFT-1 uncrewed test flight is to test the efficacy of the heat shield and back shell tiles in protecting the vehicle – and future human astronauts – from excruciating temperatures reaching over 4000 degrees Fahrenheit (2200 C) during scorching re-entry heating.
At the conclusion of the EFT-1 flight, the detached Orion capsule plunges back and re-enters the Earth’s atmosphere at 20,000 MPH (32,000 kilometers per hour).
“That’s about 80% of the reentry speed experienced by the Apollo capsule after returning from the Apollo moon landing missions,” Scott Wilson, NASA’s Orion Manager of Production Operations at KSC, told me during an interview at KSC.
A trio of parachutes will then unfurl to slow Orion down for a splashdown in the Pacific Ocean.
The Orion EFT-1 vehicle is due to roll out of the O & C in about two weeks and be moved to its fueling facility at KSC for the next step in launch processing.
Orion will eventually launch atop the SLS, NASA’s new mammoth heavy lift booster which the agency is now targeting for its maiden launch no later than November 2018 – detailed in my story here.
Stay tuned here for Ken’s continuing Orion, SLS, Boeing, Sierra Nevada, Orbital Sciences, SpaceX, commercial space, Curiosity, Mars rover, MAVEN, MOM and more Earth and planetary science and human spaceflight news.
Looking to the future of space exploration, NASA and TopCoder have launched the "High Performance Fast Computing Challenge" to improve the performance of their Pleiades supercomputer. Credit: NASA/MSFC
Artist concept of NASA’s Space Launch System (SLS) 70-metric-ton configuration launching to space. SLS will be the most powerful rocket ever built for deep space missions, including to an asteroid and ultimately to Mars. Credit: NASA/MSFC
Story updated[/caption]
After a thorough review of cost and engineering issues, NASA managers formally approved the development of the agency’s mammoth heavy lift rocket – the Space Launch System or SLS – which will be the world’s most powerful rocket ever built and is intended to take astronauts farther beyond Earth into deep space than ever before possible – to Asteroids and Mars.
The maiden test launch of the SLS is targeted for November 2018 and will be configured in its initial 70-metric-ton (77-ton) version, top NASA officials announced at a briefing for reporters on Aug. 27.
On its first flight known as EM-1, the SLS will also loft an uncrewed Orion spacecraft on an approximately three week long test flight taking it beyond the Moon to a distant retrograde orbit, said William Gerstenmaier, associate administrator for the Human Explorations and Operations Mission Directorate at NASA Headquarters in Washington, at the briefing.
Previously NASA had been targeting Dec. 2017 for the inaugural launch from the Kennedy Space Center in Florida – a slip of nearly one year.
But the new Nov. 2018 target date is what resulted from the rigorous assessment of the technical, cost and scheduling issues.
This artist concept shows NASA’s Space Launch System, or SLS, rolling to a launch pad at Kennedy Space Center at night. SLS will be the most powerful rocket in history, and the flexible, evolvable design of this advanced, heavy-lift launch vehicle will meet a variety of crew and cargo mission needs. Credit: NASA/MSFC
The decision to move forward with the SLS comes after a wide ranging review of the technical risks, costs, schedules and timing known as Key Decision Point C (KDP-C), said Associate Administrator Robert Lightfoot, at the briefing. Lightfoot oversaw the review process.
“After rigorous review, we’re committing today to a funding level and readiness date that will keep us on track to sending humans to Mars in the 2030s – and we’re going to stand behind that commitment,” said Lightfoot. “Our nation is embarked on an ambitious space exploration program.”
“We are making excellent progress on SLS designed for missions beyond low Earth orbit,” Lightfoot said. “We owe it to the American taxpayers to get it right.”
He said that the development cost baseline for the 70-metric ton version of the SLS was $7.021 billion starting from February 2014 and continuing through the first launch set for no later than November 2018.
Lightfoot emphasized that NASA is also building an evolvable family of vehicles that will increase the lift to an unprecedented lift capability of 130 metric tons (143 tons), which will eventually enable the deep space human missions farther out than ever before into our solar system, leading one day to Mars.
“It’s also important to remember that we’re building a series of launch vehicles here, not just one,” Lightfoot said.
Blastoff of NASA’s Space Launch System (SLS) rocket and Orion crew vehicle from the Kennedy Space Center, Florida. Credit: NASA/MSFC
Lightfoot and Gerstenmaier both indicated that NASA hopes to launch sooner, perhaps by early 2018.
“We will keep the teams working toward a more ambitious readiness date, but will be ready no later than November 2018,” said Lightfoot.
The next step is conduct the same type of formal KDP-C reviews for the Orion crew vehicle and Ground Systems Development and Operations programs.
The first piece of SLS flight hardware already built and to be tested in flight is the stage adapter that will fly on the maiden launch of Orion this December atop a ULA Delta IV Heavy booster during the EFT-1 mission.
The initial 70-metric-ton (77-ton) version of the SLS stands 322 feet tall and provides 8.4 million pounds of thrust. That’s already 10 percent more thrust at launch than the Saturn V rocket that launched NASA’s Apollo moon landing missions, including Apollo 11, and it can carry more than three times the payload of the now retired space shuttle orbiters.
The core stage towers over 212 feet (64.6 meters) tall with a diameter of 27.6 feet (8.4 m) and stores cryogenic liquid hydrogen and liquid oxygen. Boeing is the prime contractor for the SLS core stage.
The first stage propulsion is powered by four RS-25 space shuttle main engines and a pair of enhanced five segment solid rocket boosters (SRBs) also derived from the shuttles four segment boosters.
The pressure vessels for the Orion crew capsule, including EM-1 and EFT-1, are also being manufactured at MAF. And all of the External Tanks for the space shuttles were also fabricated at MAF.
The airframe structure for the first Dream Chaser astronaut taxi to low Earth orbit is likewise under construction at MAF as part of NASA’s commercial crew program.
The first crewed flight of the SLS is set for the second launch on the EM-2 mission around the 2020/2021 time frame, which may visit a captured near Earth asteroid.
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
Expedition 36/37 astronaut Karen Nyberg uses a fundoscope to take still and video images of her eye while in orbit. Credit: NASA
How does microgravity affect your health? One of the chief concerns of NASA astronauts these days is changes to eyesight. Some people come back from long-duration stays in space with what appears to be permanent changes, such as requiring glasses when previously they did not.
And the numbers are interesting. A few months after NASA told Universe Today that 20% of astronauts may face this problem, a new study points out that 21 U.S. astronauts that have flown on the International Space Station for long flights (which tend to be five to six months) face visual problems.
These include “hyperopic shift, scotoma and choroidal folds to cotton wool spots, optic nerve sheath distension, globe flattening and edema of the optic nerve,” states the University of Houston, which is collaborating with NASA on a long-term study of astronauts while they’re in orbit.
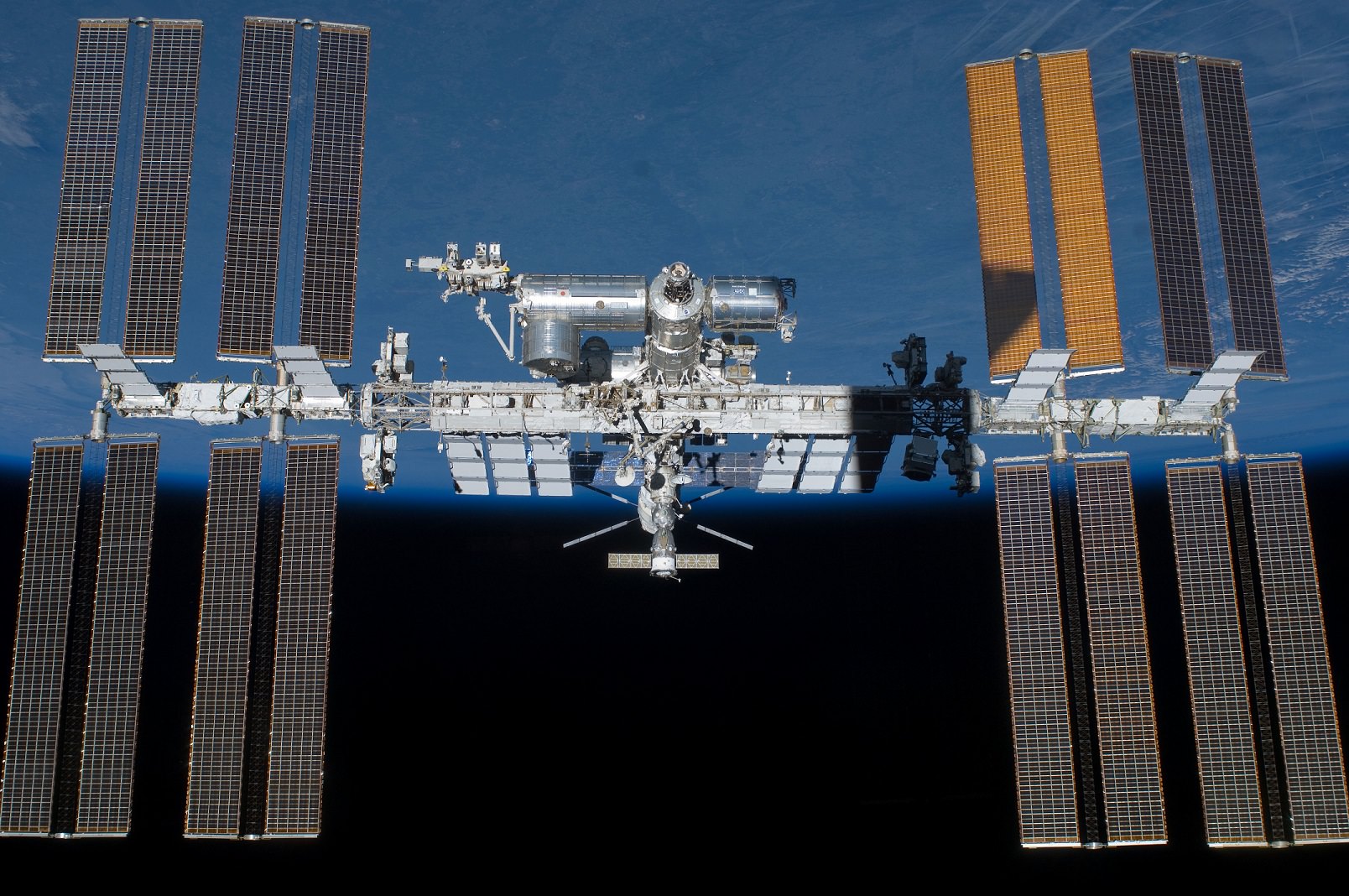
The International Space Station as seen by the departing STS-134 crew aboard space shuttle Endeavour in May 2011. Credit: NASA
NASA is flying an instrument on board the International Space Station that does optical coherence tomography, which acts like a microscope on the eye. The technology looks at things such as pressure in the eye and changes in the optic nerve and retinal structures.
The collaboration with the University of Houston recently won Heidelberg Engineering’s annual 2014 Xtreme Research Award. In the long term, the researchers involved are hoping to figure out what changes to make for long-duration missions. One example could be changing carbon dioxide levels on the station, if that is found to play a role.
Long-term health considerations will be one thing examined closely when an astronaut and a cosmonaut spend a year on the International Space Station in 2015, with their milestone bringing them in a small group of people who have spent a year or more consecutively in space.
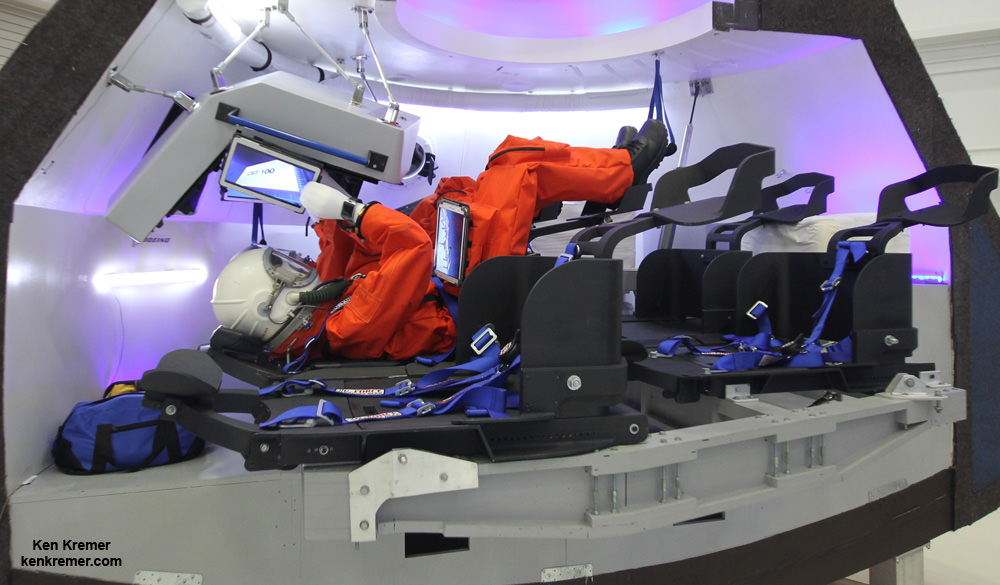
Boeing unveiled full scale mockup of their commercial CST-100 'Space Taxi' on June 9, 2014 at its intended manufacturing facility at the Kennedy Space Center in Florida. The private vehicle will launch US astronauts to low Earth orbit and the ISS from US soil. Credit: Ken Kremer - kenkremer.com
In the ‘new race to space’ to restore our capability to launch Americans to orbit from American soil with an American-built commercial ‘space taxi’ as rapidly and efficiently as possible, Boeing has moved to the front of the pack with their CST-100 spaceship by completing all their assigned NASA milestones on time and on budget in the current phase of the agency’s Commercial Crew Program (CCP).
Boeing is the first, and thus far only one of the three competitors (including Sierra Nevada Corp. and SpaceX) to complete all their assigned milestone task requirements under NASA’s Commercial Crew Integrated Capability (CCiCap) initiative funded under the auspices of the agency’s Commercial Crew Program.
The CST-100 is a privately built, man rated capsule being developed with funding from NASA via the commercial crew initiative in a public/private partnership between NASA and private industry.
The overriding goal is restart America’s capability to reliably launch our astronauts from US territory to low-Earth orbit (LEO) and the International Space Station (ISS) by 2017.
Hatch opening to Boeing’s commercial CST-100 crew transporter. Credit: Ken Kremer – kenkremer.com
Private space taxis are the fastest and cheapest way to accomplish that and end the gap in indigenous US human spaceflight launches.
Since the forced shutdown of NASA’s Space Shuttle program following its final flight in 2011, US astronauts have been 100% dependent on the Russians and their cramped but effective Soyuz capsule for rides to the station and back – at a cost exceeding $70 million per seat.
Boeing announced that NASA approved the completion of the final two commercial crew milestones contracted to Boeing for the CST-100 development.
These last two milestones are the Phase Two Spacecraft Safety Review of its Crew Space Transportation (CST)-100 spacecraft and the Critical Design Review (CDR) of its integrated systems.
The CDR milestone was completed in July and comprised 44 individual CDRs including propulsion, software, avionics, landing, power and docking systems.
The Phase Two Spacecraft Safety Review included an overall hazard analysis of the spacecraft, identifying life-threatening situations and ensuring that the current design mitigated any safety risks, according to Boeing.
“The challenge of a CDR is to ensure all the pieces and sub-systems are working together,” said John Mulholland, Boeing Commercial Crew program manager, in a statement.
“Integration of these systems is key. Now we look forward to bringing the CST-100 to life.”
Boeing CST-100 manned space capsule in free flight in low Earth orbit will transport astronaut crews to the International Space Station. Credit: Boeing
Passing the CDR and completing all the NASA milestone requirements is a significant step leading to the final integrated design for the CST-100 space taxi, ground systems and Atlas V launcher that will boost it to Earth orbit from Space Launch Complex-41 on Cape Canaveral Air Force Station in Florida.
All three American aerospace firms vying for the multibillion dollar NASA contract to build an American ‘space taxi’ to ferry US astronauts to the International Space Station and back as soon as 2017.
NASA’s Commercial Crew Program office is expected to announce the winner(s) of the high stakes, multibillion dollar contract to build America’s next crew vehicles in the next program phase, known as Commercial Crew Transportation Capability (CCtCap), “sometime around the end of August/September,” NASA News spokesman Allard Beutel confirmed to me.
“We don’t have a scheduled date for the commercial crew award(s).”
There will be 1 or more CCtCAP winners.
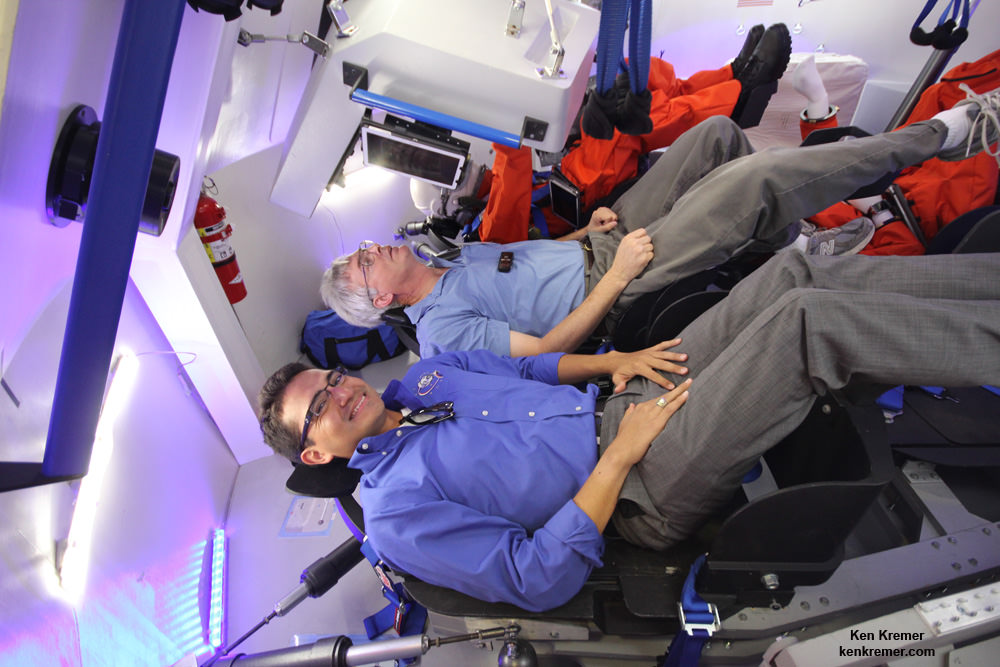
Boeing CST-100 capsule interior up close. Credit: Ken Kremer – kenkremer.com
On June 9, 2014, Boeing revealed the design of their CST-100 astronaut spaceliner by unveiling a full scale mockup of their commercial ‘space taxi’ at the new home of its future manufacturing site at the Kennedy Space Center (KSC) located inside a refurbished facility that most recently was used to prepare NASA’s space shuttle orbiters for assembly missions to the ISS.
The CST-100 crew transporter was unveiled at the invitation only ceremony and media event held inside the gleaming white and completely renovated NASA processing hangar known as Orbiter Processing Facility-3 (OPF-3) – and attended by Universe Today.
The huge 64,000 square foot facility has sat dormant since the shuttles were retired following their final flight (STS-135) in July 2011 and which was commanded by Chris Ferguson, who now serves as director of Boeing’s Crew and Mission Operations.
Ferguson and the Boeing team are determined to get Americans back into space from American soil with American rockets.
Read my exclusive, in depth one-on-one interviews with Chris Ferguson – America’s last shuttle commander – about the CST-100; here and here.
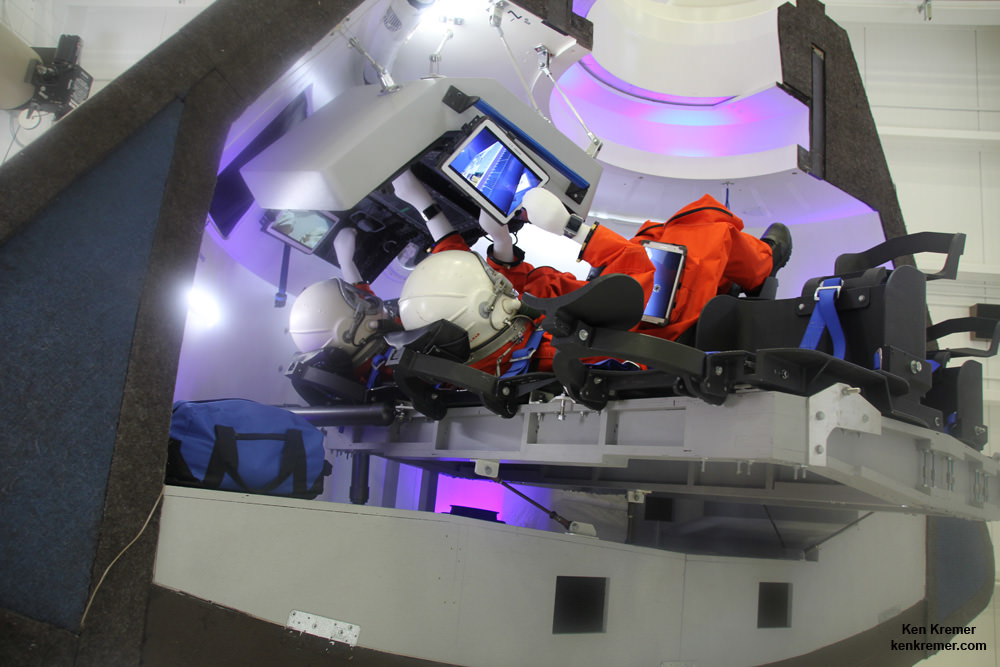
Chris Ferguson, last Space Shuttle Atlantis commander, tests the Boeing CST-100 capsule which may fly US astronauts to the International Space Station in 2017. Ferguson is now Boeing’s director of Crew and Mission Operations for the Commercial Crew Program vying for NASA funding. Credit: NASA/Boeing
Boeing’s philosophy is to make the CST-100 a commercial endeavor, as simple and cost effective as possible in order to quickly kick start US human spaceflight efforts. It’s based on proven technologies drawing on Boeing’s 100 year heritage in aviation and space.
“The CST-100, it’s a simple ride up to and back from space,” Ferguson told me. “So it doesn’t need to be luxurious. It’s an ascent and reentry vehicle – and that’s all!”
So the CST-100 is basically a taxi up and a taxi down from LEO. NASA’s complementary human space flight program involving the Orion crew vehicle is designed for deep space exploration.
The vehicle includes five recliner seats, a hatch and windows, the pilots control console with several attached Samsung tablets for crew interfaces with wireless internet, a docking port to the ISS and ample space for 220 kilograms of cargo storage of an array of equipment, gear and science experiments depending on NASA’s allotment choices.
The interior features Boeing’s LED Sky Lighting with an adjustable blue hue based on its 787 Dreamliner airplanes to enhance the ambience for the crew.
Boeing CST-100 crew capsule will carry five person crews to the ISS. Credit: Ken Kremer – kenkremer.com
The reusable capsule will launch atop a man rated United Launch Alliance (ULA) Atlas V rocket.
“The first unmanned orbital test flight is planned in January 2017… and may go to the station,” Ferguson told me during our exclusive interview about Boeing’s CST-100 plans.
Since 2010, NASA has spent over $1.5 billion on the commercial crew effort.
Boeing has received the largest share of funding in the current CCiCAP phase amounting to about $480 million. SpaceX received $460 million for the Dragon V2 and Sierra Nevada Corp. (SNC) has received a half award of $227.5 million for the Dream Chasermini-shuttle.
SNC will be the next company to complete all of NASA’s milestones this Fall, SNC VP Mark Sirangelo told me in an exclusive interview. SpaceX will be the final company finishing its milestones sometime in 2015.
Stay tuned here for Ken’s continuing Boeing, Sierra Nevada, SpaceX, Orbital Sciences, commercial space, Orion, Curiosity, Mars rover, MAVEN, MOM and more planetary and human spaceflight news.
Boeing’s CST-100 project engineer Tony Castilleja describes the capsule during a fascinating interview with Ken Kremer/Universe Today on June 9, 2014 while sitting inside the full scale mockup of the Boeing CST-100 space taxi during unveiling ceremony at NASA’s Kennedy Space Center. Credit: Ken Kremer – kenkremer.com
Five candidate sites were identified on Comet 67P/Churyumov-Gerasimenko for Rosetta’s Philae lander. The approximate locations of the five regions are marked on these OSIRIS narrow-angle camera images taken on 16 August 2014 from a distance of about 100 km. Enlarged insets below highlight 5 landing zones. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Processing: Marco Di Lorenzo/Ken Kremer
Five candidate sites were identified on Comet 67P/Churyumov-Gerasimenko for Rosetta’s Philae lander. The approximate locations of the five regions are marked on these OSIRIS narrow-angle camera images taken on 16 August 2014 from a distance of about 100 km. Enlarged insets below highlight 5 landing zones. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Processing: Marco Di Lorenzo/Ken Kremer
Story updated[/caption]
The ‘Top 5’ landing site candidates have been chosen for the Rosetta orbiters piggybacked Philae lander for humankind’s first attempt to land on a comet. See graphics above and below.
The potential touchdown sites were announce today, Aug. 25, based on high resolution measurements collected by ESA’s Rosetta spacecraft over the past two weeks since arriving at the bizarre and pockmarked Comet 67P/Churyumov-Gerasimenko on Aug. 6, 2014.
Rosetta is a mission of many firsts, including history’s first ever attempt to orbit a comet for long term study.
Philae’s history making landing on comet 67P is currently scheduled for around Nov. 11, 2014, and will be entirely automatic. The 100 kg lander is equipped with 10 science instruments.
“This is the first time landing sites on a comet have been considered,” said Stephan Ulamec, Lander Manager at DLR (German Aerospace Center), in an ESA statement.
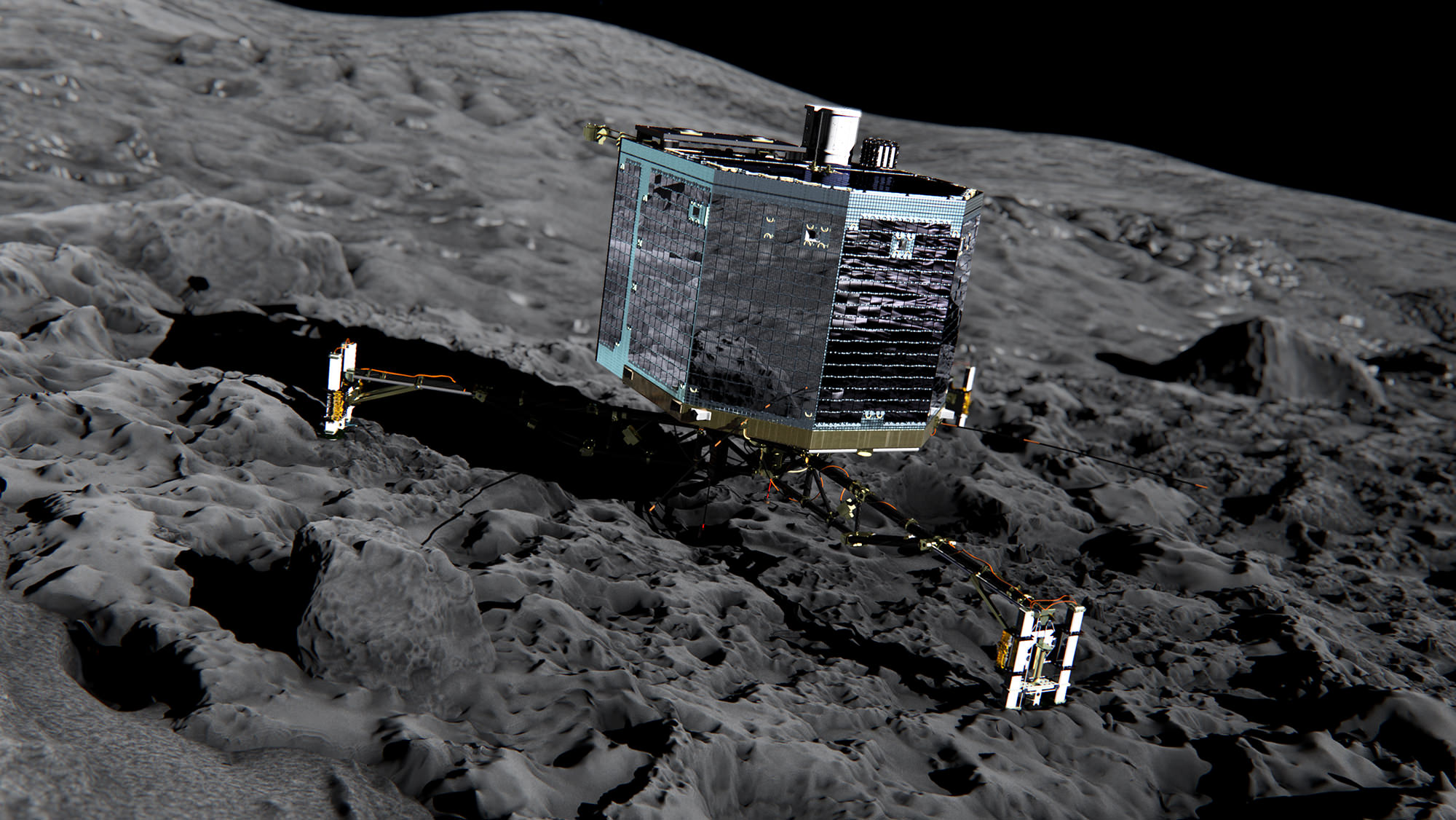
Artist impression of Philae on the surface of comet 67P/Churyumov-Gerasimenko. Credit: ESA/ATG medialab
Since rendezvousing with the comet after a decade long chase of over 6.4 billion kilometers (4 Billion miles), a top priority task for the science and engineering team leading Rosetta has been “Finding a landing strip” for the Philae comet lander.
“The challenge ahead is to map the surface and find a landing strip,” said Andrea Accomazzo, ESA Rosetta Spacecraft Operations Manager, at the Aug. 6 ESA arrival live webcast.
So ‘the clock is ticking’ to select a suitable landing zone soon as the comet warms up and the surface becomes ever more active as it swings in closer to the sun and makes the landing ever more hazardous.
This past weekend, the site selection team met at CNES, Toulouse, France, and intensively discussed and scrutinized a preliminary list of 10 potential sites, and whittled that down to the ‘Top 5.’
Their goal was to find a ‘technically feasible’ touchdown site that was both safe and scientifically interesting.
“The site must balance the technical needs of the orbiter and lander during all phases of the separation, descent, and landing, and during operations on the surface with the scientific requirements of the 10 instruments on board Philae,” said ESA.
They also had to be within an ellipse of at least 1 square kilometer (six-tenths of a square mile) in diameter due to uncertainties in navigation as well as many other factors.
“For each possible zone, important questions must be asked: Will the lander be able to maintain regular communications with Rosetta? How common are surface hazards such as large boulders, deep crevasses or steep slopes? Is there sufficient illumination for scientific operations and enough sunlight to recharge the lander’s batteries beyond its initial 64-hour lifetime, while not so much as to cause overheating?” according to ESA.
Stephan Ulamec, Philae Lander Manager at DLR (German Aerospace Center) discusses landing during ESA webcast of Rosetta’s arrival at comet Comet 67P/Churyumov-Gerasimenko. Credit: ESA
The Landing Site Selection Group (LSSG) team was comprised of engineers and scientists from Philae’s Science, Operations and Navigation Centre (SONC) at CNES, the Lander Control Centre (LCC) at DLR, scientists representing the Philae Lander instruments as well as the ESA Rosetta team, which includes representatives from science, operations and flight dynamics.
“Based on the particular shape and the global topography of Comet 67P/ Churyumov-Gerasimenko, it is probably no surprise that many locations had to be ruled out,” said Ulamec.
“The candidate sites that we want to follow up for further analysis are thought to be technically feasible on the basis of a preliminary analysis of flight dynamics and other key issues – for example they all provide at least six hours of daylight per comet rotation and offer some flat terrain. Of course, every site has the potential for unique scientific discoveries.”
When Rosetta arrived on Aug. 6, it was initially orbiting at a distance of about 100 km (62 miles) in front of the comet. Carefully timed thruster firings then brought it to within about 80 km distance. And it is moving far closer – to within 50 kilometers (31 miles) and even closer!
Upon arrival the comet was 522 million km from the Sun. As Rosetta escorts the comet looping around the sun, they move much closer. By landing time in mid-November they are only about 450 million km (280 million mi) from the sun.
At closest approach on 13 August 2015 the comet and Rosetta will be 185 million km from the Sun. That corresponds to an eightfold increase in the light received from the Sun.
Five candidate sites were identified on Comet 67P/Churyumov-Gerasimenko for Rosetta’s Philae lander. The approximate locations of the five regions are marked on these OSIRIS narrow-angle camera images taken on 16 August 2014 from a distance of about 100 km. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
Therefore Rosetta and Philae will simultaneously study the warming effects of the sun as the comet outgases dust, water and much more.
The short period Comet 67P/Churyumov-Gerasimenko has an orbital period of 6.5 years.
“The comet is very different to anything we’ve seen before, and exhibits spectacular features still to be understood,” says Jean-Pierre Bibring, a lead lander scientist and principal investigator of the CIVA instrument.
“The five chosen sites offer us the best chance to land and study the composition, internal structure and activity of the comet with the ten lander experiments.”
A close-up view of Comet 67P/Churyumov–Gerasimenko taken by the Rosetta spacecraft on Aug. 7, 2014. Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
The ‘Top 5’ zones will be ranked by 14 September. Three are on the ‘head’ and two are on the ‘body’ of the bizarre two lobed alien world.
And a backup landing site will also be chosen for planning purposes and to develop landing sequences.
The ultimate selection of the primary landing site is slated for 14 October after consultation between ESA and the lander team on a “Go/No Go” decision.
The three-legged lander will fire two harpoons and use ice screws to anchor itself to the 4 kilometer (2.5 mile) wide comet’s surface. Philae will collect stereo and panoramic images and also drill 23 centimeters into and sample its incredibly varied surface.
Why study comets?
Comets are leftover remnants from the formation of the solar system. Scientists believe they delivered a vast quantity of water to Earth. They may have also seeded Earth with organic molecules – the building blocks of life as we know it.
Any finding of organic molecules will be a major discovery for Rosetta and ESA and inform us about the origin of life on Earth.
Read an Italian language version of this story by my imaging partner Marco Di Lorenzo – here
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
Holger Sierks, OSIRIS principal investigator, discusses spectacular hi res comet images returned so far by Rosetta during the Aug. 6 ESA webcast from mission control at ESOC, Darmstadt, Germany. Credit: Roland KellerESA’s Rosetta Spacecraft nears final approach to Comet 67P/Churyumov-Gerasimenko in late July 2014. This collage of imagery from Rosetta combines Navcam camera images at right taken nearing final approach from July 25 (3000 km distant) to July 31, 2014 (1327 km distant), with OSIRIS wide angle camera image at left of comet’s expanding coma cloud on July 25. Images to scale and contrast enhanced to show further detail. Credit: ESA/Rosetta/NAVCAM/OSIRIS/MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Collage/Processing: Marco Di Lorenzo/Ken Kremer
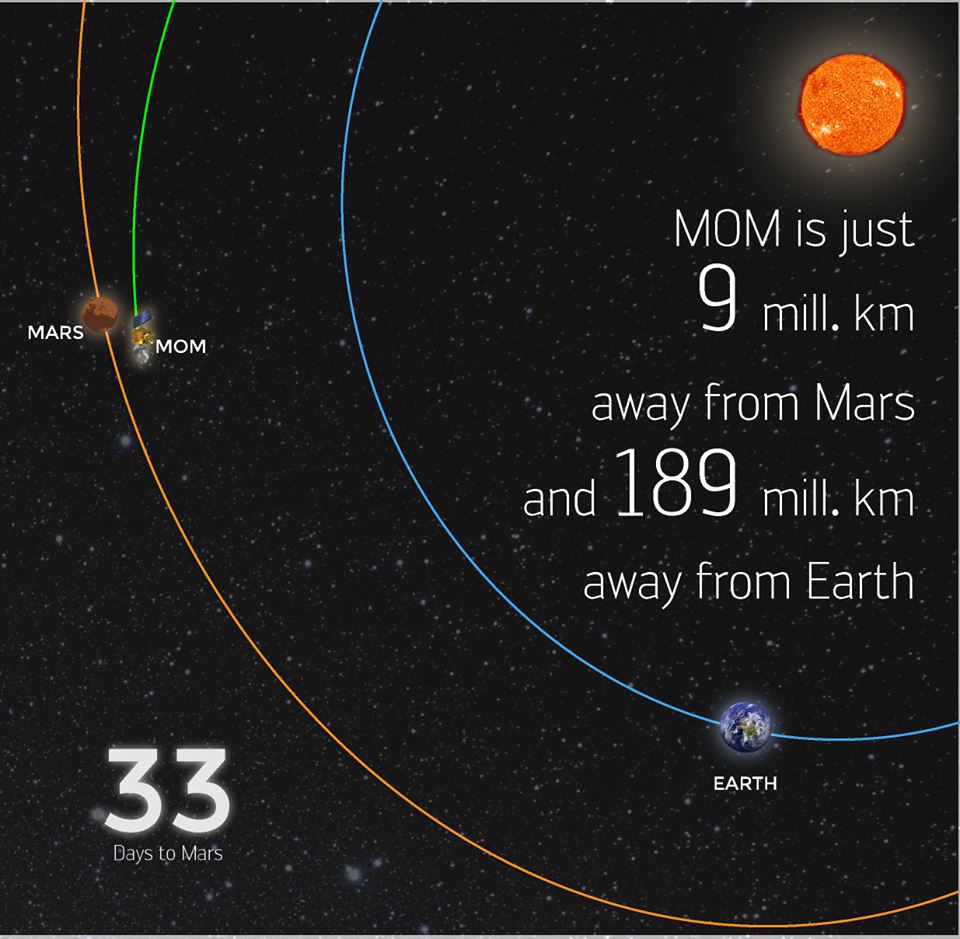
ISRO's Mars Orbiter Mission spacecraft is just 9 million km away from Mars as of Aug. 22, 2014. Credit: ISRO
India’s maiden foray to Mars is now just one month out from the Red Planet and closing in fast on the final stages of the history making rendezvous culminating on September 24, 2014.
As of Aug. 22, 2014, the Mars Orbiter Mission, or MOM, was just 9 million kilometers away from Mars and the crucial Mars Orbital Insertion (MOI) engine firing that places India’s first interplanetary voyager into orbit around the 4th planet from the Sun.
MOM was designed and developed by the Indian Space Research Organization’s (ISRO) at a cost of $69 Million and marks India’s maiden foray into interplanetary flight.
So far it has traveled a total distance of 602 million km in its heliocentric arc towards Mars, says ISRO. It is currently 189 million km away from Earth. Round trip radio signals communicating with MOM take 20 minutes and 47 seconds.
After streaking through space for some ten and a half months, the 1,350 kilogram (2,980 pound) MOM probe will fire its 440 Newton liquid fueled main engine to brake into orbit around the Red Planet on September 24, 2014 – where she will study the atmosphere and sniff for signals of methane.
The do or die MOI burn on September 24 places MOM into an 377 km x 80,000 km elliptical orbit around Mars.
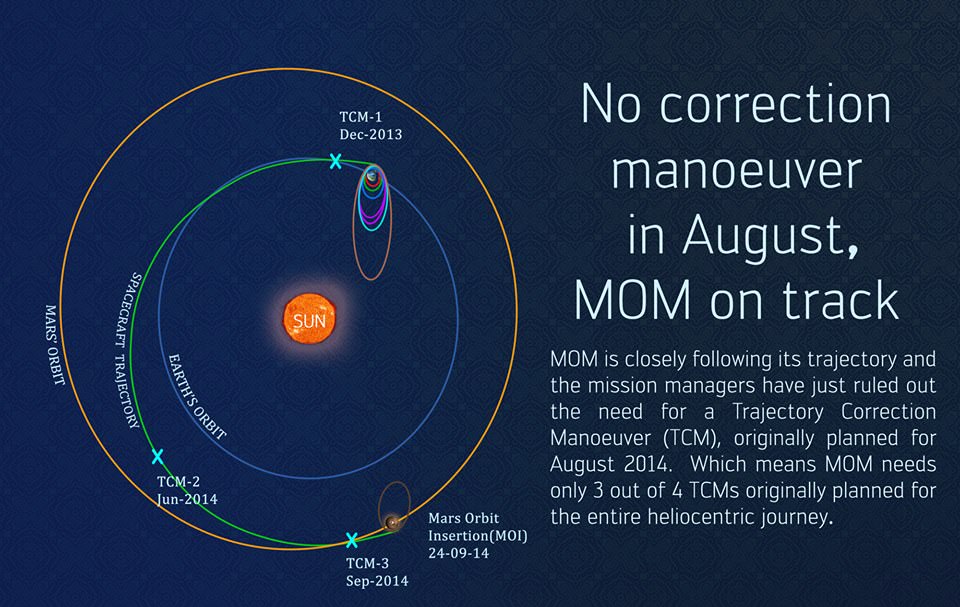
ISRO space engineers are taking care to precisely navigate MOM to keep it on course during its long heliocentric trajectory from Earth to Mars through a series of in flight Trajectory Correction Maneuvers (TMSs).
The last TCM was successfully performed on June 11 by firing the spacecraft’s 22 Newton thrusters for a duration of 16 seconds. TCM-1 was conducted on December 11, 2013 by firing the 22 Newton Thrusters for 40.5 seconds.
Engineers determined that a TCM planned for August was not needed.
The final TCM firing is planned in September 2014.
MOM’s trajectory to Mars. Credit: ISRO
Engineers also completed the checkout of the medium gain antenna in August, “which will be used to communicate with Earth during the critical MOI” maneuver, ISRO reported.
The probe is being continuously monitored by the Indian Deep Space Network (IDSN) and NASA JPL’s Deep Space Network (DSN) to maintain it on course.
Blastoff of the Indian developed Mars Orbiter Mission (MOM) on Nov. 5, 2013 from the Indian Space Research Organization’s (ISRO) Satish Dhawan Space Centre SHAR, Sriharikota. Credit: ISRO
MOM was launched on Nov. 5, 2013 from India’s spaceport at the Satish Dhawan Space Centre, Sriharikota, atop the nations indigenous four stage Polar Satellite Launch Vehicle (PSLV) which placed the probe into its initial Earth parking orbit.
Six subsequent orbit raising maneuvers raised its orbit and culminated with a liquid fueled main engine firing on Dec. 1, 2013. The Trans Mars Injection(TMI) maneuver that successfully placed MOM on its heliocentric trajectory to the Red Planet.
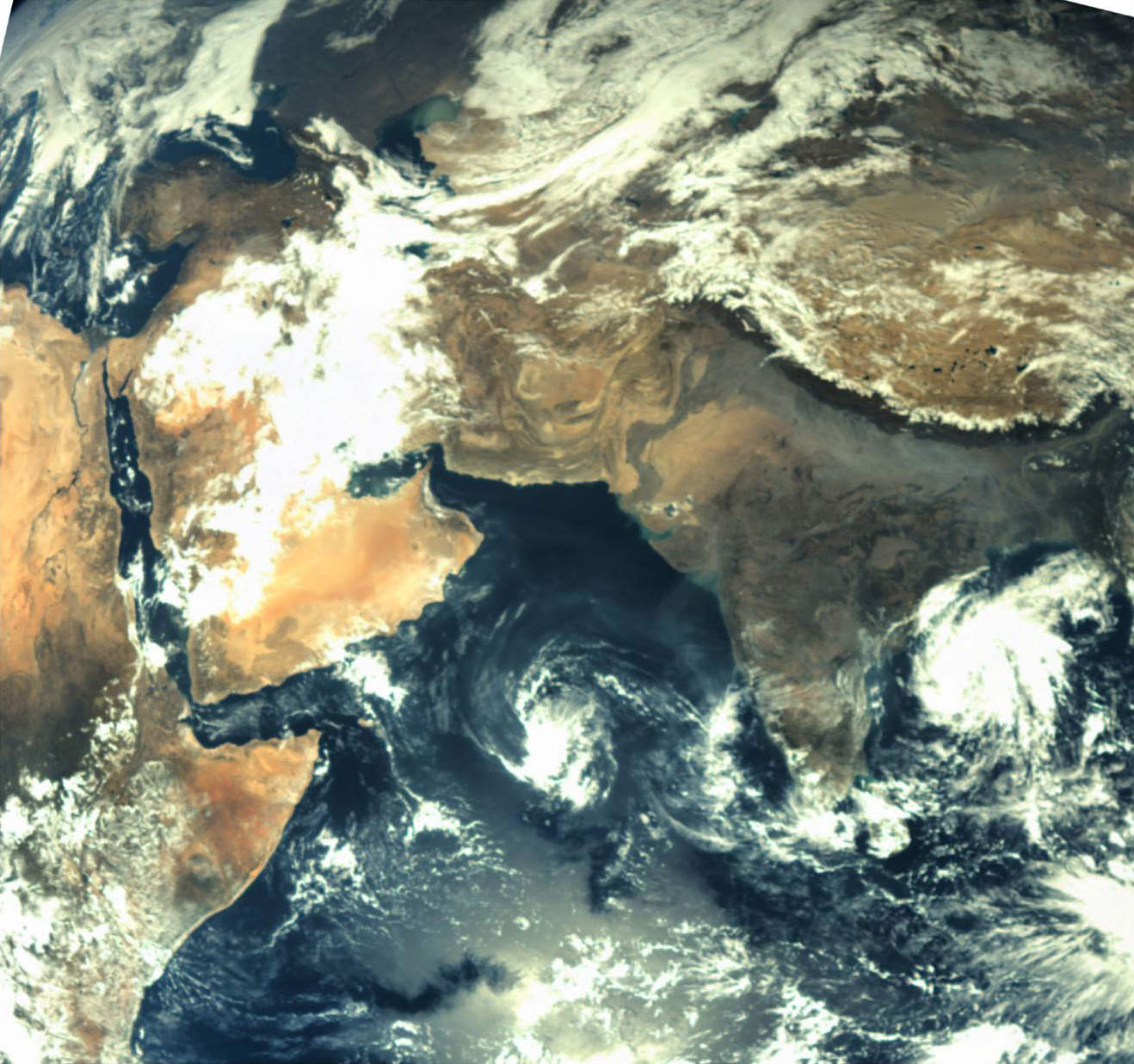
First ever image of Earth Taken by Mars Color Camera aboard India’s Mars Orbiter Mission (MOM) spacecraft while orbiting Earth and before the Trans Mars Insertion firing on Dec. 1, 2013. Image is focused on the Indian subcontinent. Credit: ISRO
MOM is streaking to Mars along with NASA’s MAVEN orbiter, which arrives at Mars about two days earlier.
MOM and MAVEN will join Earth’s fleet of 3 current orbiters from NASA and ESA as well as NASA’s pair of sister surface rovers Curiosity and Opportunity.
If all goes well, India will join an elite club of only four who have launched probes that successfully investigated the Red Planet from orbit or the surface – following the Soviet Union, the United States and the European Space Agency (ESA).
MOM’s main objective is a demonstration of technological capabilities and it will also study the planet’s atmosphere and surface.
The probe is equipped with five indigenous instruments to conduct meaningful science – including a multi color imager and a methane gas sniffer to study the Red Planet’s atmosphere, morphology, mineralogy and surface features. Methane on Earth originates from both geological and biological sources – and could be a potential marker for the existence of Martian microbes.
India’s Mars Orbiter Mission (MOM) marked 100 days out from Mars on June 16, 2014 and the Mars Orbit Insertion engine firing when it arrives at the Red Planet on September 24, 2014 after its 10 month interplanetary journey. Credit ISRO
ISRO is also working to determine if MOM can gather scientific measurements of
Comet C/2013 A1 Siding Spring during an extremely close flyby with the Red Planet on Oct. 19, 2014.
MAVEN and NASA’s other Mars probes will study the comet.
Stay tuned here for Ken’s continuing MOM, MAVEN, Opportunity, Curiosity, Mars rover and more planetary and human spaceflight news.
A screenshot of an experiment in the Flame Extinguishment Experiment - 2 (FLEX-2) on the International Space Station, taken during Expedition 40 in August 2014. Credit: Reid Wiseman/Vine
Reid Wiseman, NASA astronaut and part-time master of Vine videos, has done it again. This time he’s showing off a flame experiment on the International Space Station called the Flame Extinguishment Experiment-2 (FLEX-2).
“Ignition, jellyfish of fire, warp-drive finish!” wrote Wiseman on Vine yesterday (Aug. 22). He also posted a slow-motion capture of flames in action, which you can see below the jump. FLEX-2, as the name implies, is the second flame experiment on board the International Space Station. NASA states the goal is to understand how small fuel droplets burn in space.
“The FLEX-2 experiment studies how quickly fuel burns, the conditions required for soot to form, and how mixtures of fuels evaporate before burning. Understanding these processes could lead to the production of a safer spacecraft as well as increased fuel efficiency for engines using liquid fuel on Earth,” the agency wrote.
Holger Sierks, OSIRIS principal investigator, discusses spectacular hi res comet images returned so far by Rosetta during the Aug. 6 ESA webcast from mission control at ESOC, Darmstadt, Germany. Credit: Roland Keller
Animation Caption: Possible landing sites on Comet 67P/Churyumov-Gerasimenko. The model shows the illumination of the comets surface and regions under landing site consideration for the Philae lander on board ESA’s Rosetta spececraft . Credit: CNES
“The race is on” to find a safe and scientifically interesting landing site for the Philae lander piggybacked on ESA’s Rosetta spacecraft as it swoops in ever closer to the heavily cratered Comet 67P/Churyumov-Gerasimenko since arriving two weeks ago after a decade long chase of 6.4 billion kilometers (4 Billion miles).
Rosetta made history by becoming the first ever probe from Earth to orbit a comet upon arrival on Aug. 6, 2014.
The probe discovered an utterly alien and bizarre icy wanderer that science team member Mark McCaughrean, of ESA’s Science Directorate, delightedly calls a ‘Scientific Disneyland.’
“It’s just astonishing,” he said during a live ESA webcast of the Aug. 6 arrival event.
Now, another audacious and history making event is on tap – Landing on the comet!
To enable a safe landing, Rosetta is moving in closer to the comet to gather higher resolution imaging and spectroscopic data. When Rosetta arrived on Aug. 6, it was initially orbiting at a distance of about 100 km (62 miles). As of today, carefully timed thruster firings have brought it to within about 80 km distance. And it will get far closer.
Right now a top priority task for the science and engineering team leading Rosetta is “Finding a landing strip” for the Philae comet lander.
Philae’s landing on comet 67P is currently scheduled for Nov. 11, 2014. The 100 kg lander is equipped with 10 science instruments
“The challenge ahead is to map the surface and find a landing strip,” said Andrea Accomazzo, ESA Rosetta Spacecraft Operations Manager, at the Aug. 6 ESA webcast.
The team responsibility for choosing the candidate sites comprises “the Landing Site Selection Group (LSSG), which comprises engineers and scientists from Philae’s Science, Operations and Navigation Centre (SONC) at CNES, the Lander Control Centre (LCC) at DLR, scientists representing the Philae Lander instruments, and supported by the ESA Rosetta team, which includes representatives from science, operations and flight dynamics,” according to an ESA statement.
This week the team is intensively combing through a preliminary list of 10 potential landing sites.
Over the weekend they will whittle the list down to five candidate landing sites for continued detailed analysis.
ESA will announce the Top 5 landing site candidates on Monday, Aug. 25.
Where will Philae land?
This image of comet 67P/Churyumov-Gerasimenko shows the diversity of surface structures on the comet’s nucleus. It was taken by the Rosetta spacecraft’s OSIRIS narrow-angle camera on August 7, 2014. At the time, the spacecraft was 65 miles (104 kilometers) away from the 2.5 mile (4 kilometer) wide nucleus. Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA/Enhanced processing Marco Di Lorenzo/Ken Kremer
The decision rests on the results of Rosetta’s ongoing global mapping campaign, including high resolution imaging from the OSIRIS and NAVCAM cameras and further observations from the other science instruments, especially MIRO, VIRTIS, ALICE, GIADA and ROSINA.
The surface criteria for a suitable landing site include day time landing illumination, a balance between day and night to allow the solar panels to recharge the batteries, avoiding steep slopes, large boulders and deep crevasses so it doesn’t topple over.
Of course the team also must consider the comet’s rotation period (12.4 hours) and axis of rotation (see animation at top). Sites near the equator offering roughly equal periods of day and night may be preferred.
The selection of the primary landing site is slated for mid-October after consultation between ESA and the lander team on a “Go/No Go” decision.
The three-legged lander will fire two harpoons and use ice screws to anchor itself to the 4 kilometer (2.5 mile) wide comet’s surface. Philae will collect stereo and panoramic images and also drill 23 centimeters into and sample its incredibly varied surface.
Artist impression of Philae on the surface of comet 67P/Churyumov-Gerasimenko. Credit: ESA/ATG medialab
Read an Italian language version of this story by my imaging partner Marco Di Lorenzo – here
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.