The European Space Agency cargo ship Georges Lemaître, the last automated transfer vehicle, docked safely at the International Space Station Aug. 12, 2014. Credit: NASA/Twitter
It took two weeks to get there, but all indications is it was worth the wait. The final automated transfer vehicle of the European Space Agency successfully docked with the International Space Station today (Aug. 12) at 9:30 a.m. EDT (1:30 p.m. UTC) — right on time.
The cargo vehicle has about seven tons of stuff on board, ranging from science experiments to fresh food. The astronauts always enjoy it when fruit and other new food arrives in these shipments, given so many of their meals are freeze-dried.
Also on board was a new rendezvous system manufactured by Canadian company Neptec, which is testing out new ways of docking for future cargo vehicles. And when it’s time for Georges Lemaître to leave the station around January 2015, sensors inside will monitor its planned destruction to make future cargo vehicles better equipped to survive re-entry.
Georges Lemaître left Earth July 29 from French Guiana, as did its four predecessors. The series of ATVs started in March 2008 when Jules Verne departed to resupply the Expedition 16 crew. The other vehicles were called Johannes Kepler, Edoardo Amaldi and Albert Einstein.
The new vehicle will be opened up on Wednesday. It will be a busy week for cargo vehicles at the station, as the privately constructed Cygnus spacecraft (from Orbital Sciences) is expected to leave the station on Friday at 6:40 a.m. EDT (10:40 a.m. UTC). Both Alexander Gerst (ESA) and Reid Wiseman (NASA) will release Cygnus using Canadarm2, a robotic arm on station.
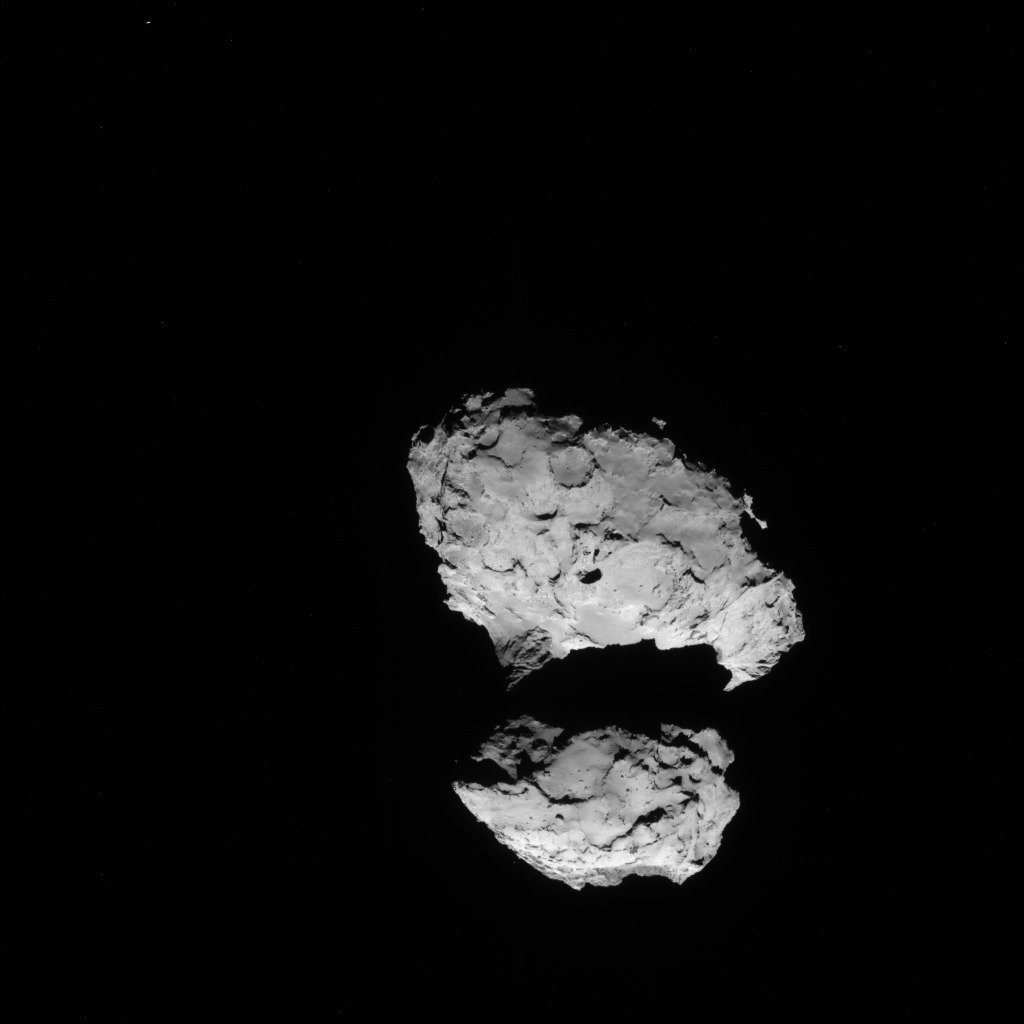
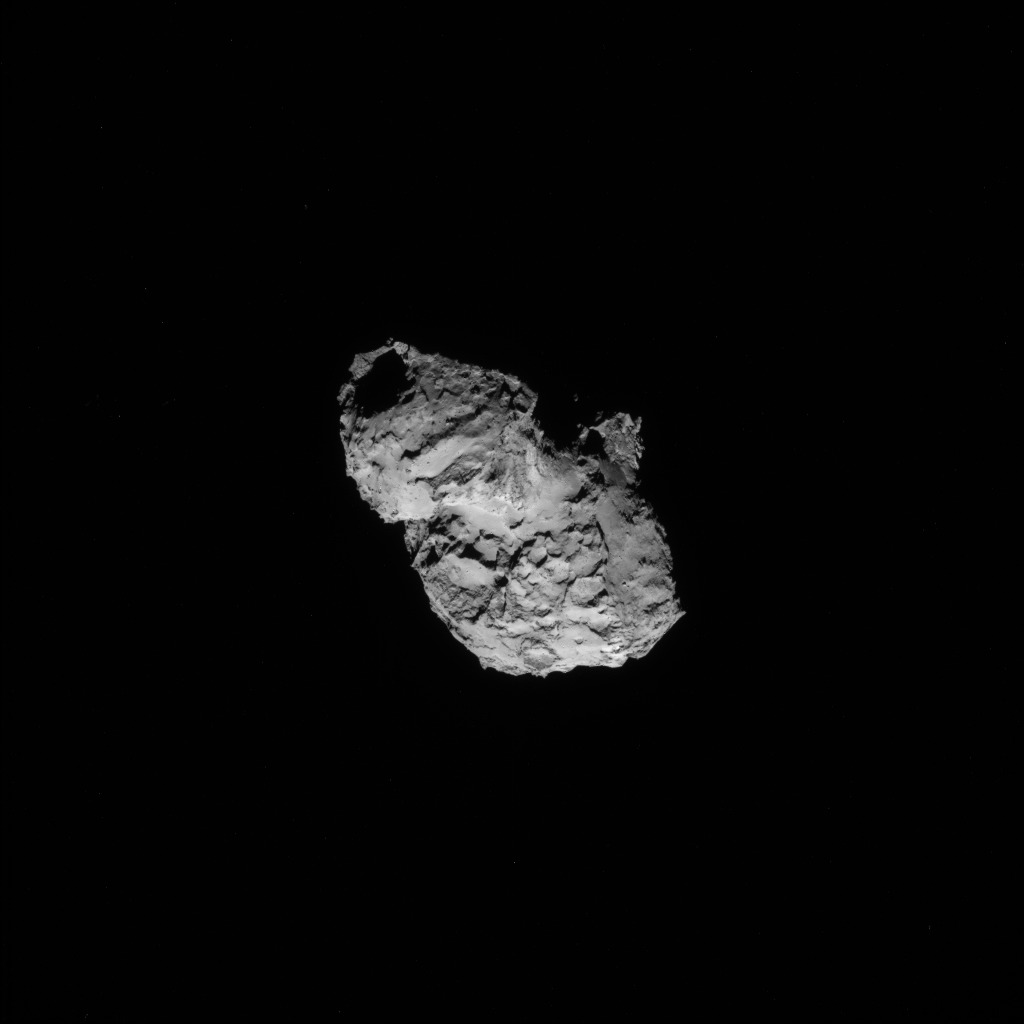
Rosetta NAVCAM image taken on 10 August 2014 from a distance of about 110 km from comet 67P/Churyumov-Gerasimenko. The comet nucleus is about 4 km across. Credit: ESA/Rosetta/NAVCAM
With the historic arrival of the European Space Agency’s (ESA) Rosetta spacecraft at destination Comet 67P/Churyumov-Gerasimenko flawlessly accomplished on August 6, 2014 after a decade long journey, ground breaking up close science at this bizarre world has begun while the team diligently and simultaneously searches for a landing site for the attached Philae comet lander.
Rosetta started collecting cometary dust from the coma encircling the comet’s nucleus with the onboard COSIMA instrument on Sunday, August 10, 2014 as the spacecraft orbits around and ahead of the icy wanderer from a distance of approximately 100 kilometers (62 miles). See coma image below.
Hopes are high that unprecedented science discoveries await at this alien world described as a “Scientific Disneyland,” by Mark McCaughrean, senior scientific adviser to ESA’s Science Directorate, during ESA’s live arrival day webcast. “It’s just astonishing.”
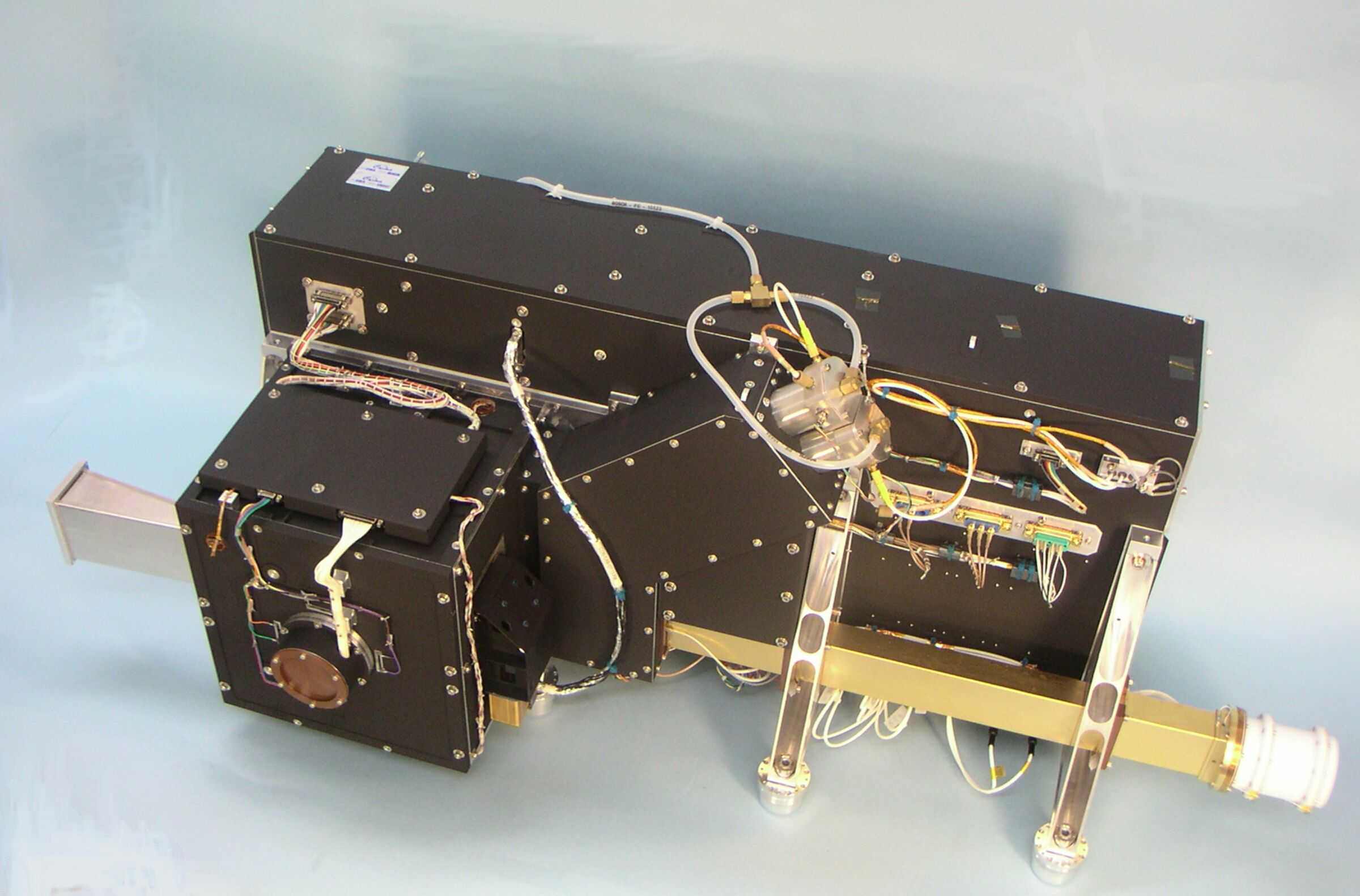
COSIMA stands for Cometary Secondary Ion Mass Analyser and is one of Rosetta’s suite of 11 state-of-the-art science instruments with a combined mass of 165 kg.
Its purpose is to conduct the first “in situ” analysis of the grains of dust particles emitted from the comets nucleus and determine their physical and chemical characteristics, including whether they are organic or inorganic – in essence what is cometary dust material made of and how it differs from the surface composition.
COSIMA will collect the coma dust using 24 specially designed ‘target holders’ – the first of which was opened to study the comets environment on Aug. 10. Since the comet is not especially active right now, the team plans to keep the target holder open for at least a month and check the progress of any particle collections on a weekly basis.
COSISCOPE image of the first target taken on 19 July 2014 (before the exposure, on 10 August, for cometary dust collection). The 1×1 cm target consists of a gold plate covered with a thin layer (30 µm) of gold nanoparticles (“gold black”). Illumination is by two LEDs, from the right side in this case. The bright dots on the vertical strip on the right side are used for target identification and for defining the coordinate system. Credits: ESA/Rosetta/MPS for COSIMA Team MPS/CSNSM/UNIBW/TUORLA/IWF/IAS/ESA/BUW/MPE/LPC2E/LCM/FMI/UTU/LISA/UOFC/vH&S
In fact the team says the coma environment “is still comparable to a high-quality cleanroom”at this time.
But everyone expects that to change radically as Rosetta continues escorting Comet 67P as it loops around the sun, getting closer and warming the surface every day and until reaching perihelion in August 2015.
COSIMA is managed by the Max Planck Institute for Solar System Research (Max-Planck-Institut für Sonnensystemforschung ) in Katlenburg-Lindau, Germany, with Principal Investigator Martin Hilchenbach.
There are also substantial contributions from the Institut d’Astrophysique Spatiale in France, Finnish Meteorological Institute, Osterreichisches Forschungszentrum Seibersdorf and more.
The target holders measure about one square centimeter and were developed by the Universität der Bundeswehr in Germany.
Each of these targets measures one square centimeter and is comprised of a gold plate covered with a thin 30 µm layer of gold nanoparticles (“gold black”) which the team says should “decelerate and capture cometary dust particles impacting with velocities of ~100 m/s.”
The target will be illuminated by a pair of LED’s to find the dust particles. The particles will be analyzed by COSIMA’s built in mass spectrometer after being located on the target holder by the French supplied COSISCOPE microscopic camera and ionized by a beam of indium ions.
Photo of the COSIMA (Cometary Secondary Ion Mass Analyser) instrument on Rosetta. Credit: Max Planck Institute for Solar System Research/ESA
The team expects any grains found on the first target to be analyzed by mid-September 2014.
“COSIMA uses the method of Secondary Ion Mass Spectrometry. They will be fired at with a beam of Indium ions. This will spark individual ions (we say secondary ions) from their surfaces, which will then be analysed with COSIMA’s mass spectrometer,” according to a description from the COSIMA team.
The mass spec has the capability to analyze the elemental composition in an atomic mass range of 1 to 4000 atomic mass units, determine isotopic abundances of some key elements, characterize organic components and functional groups, and conduct mineralic and petrographic characterization of the inorganic phases, all of which will inform as as never before about solar system chemistry.
Comets are leftover remnants from the formation of the solar system. Scientists believe they delivered a vast quantity of water to Earth. They may have also seeded Earth with organic molecules – the building blocks of life as we know it.
Any finding of organic molecules and their identification by COSIMA will be a major discovery for Rosetta and ESA and inform us about the origin of life on Earth.
Data obtained so far from Rosetta’s VIRTIS instrument indicates the comets surface is too hot to be covered in ice and must instead have a dark, dusty crust.
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
ESA’s Rosetta Spacecraft nears final approach to Comet 67P/Churyumov-Gerasimenko in late July 2014. This collage of imagery from Rosetta combines Navcam camera images at right taken nearing final approach from July 25 (3000 km distant) to July 31, 2014 (1327 km distant), with OSIRIS wide angle camera image at left of comet’s expanding coma cloud on July 25. Images to scale and contrast enhanced to show further detail. Credit: ESA/Rosetta/NAVCAM/OSIRIS/MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Collage/Processing: Marco Di Lorenzo/Ken Kremer
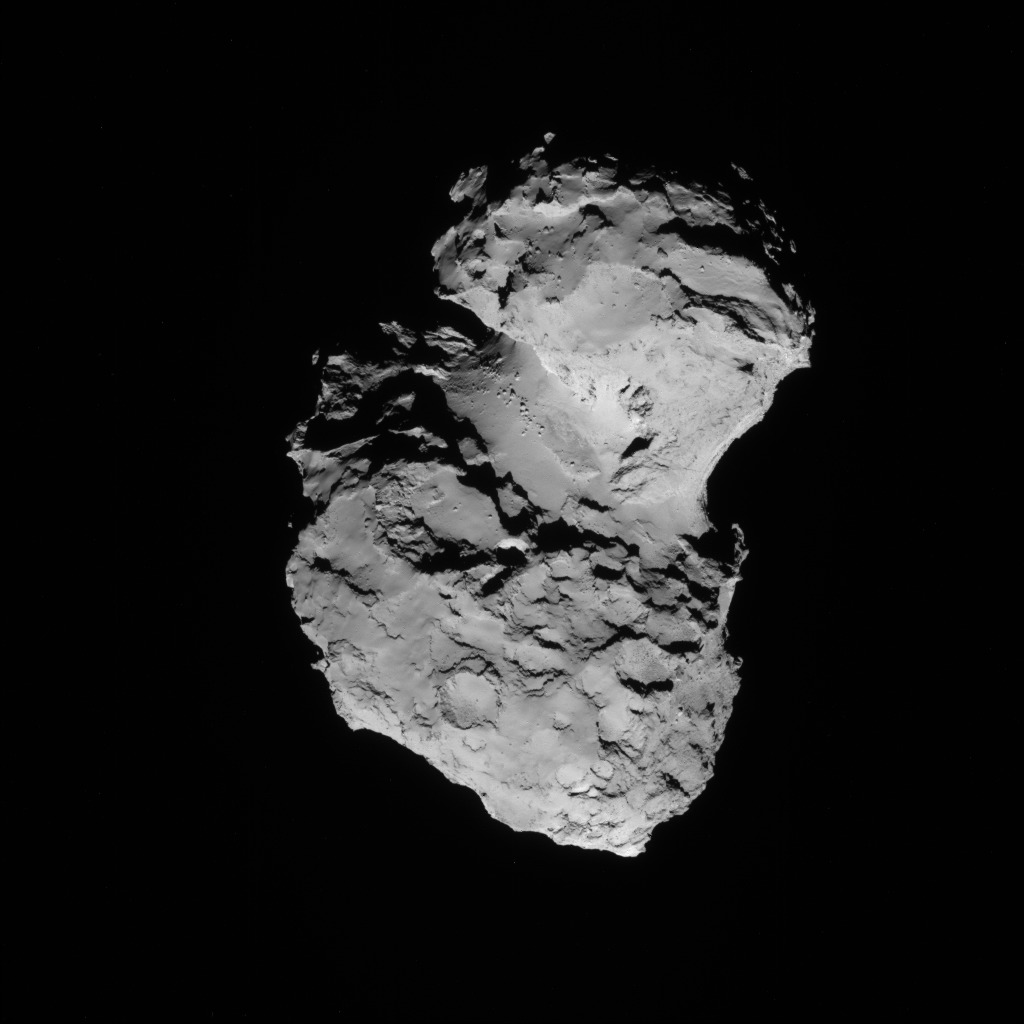
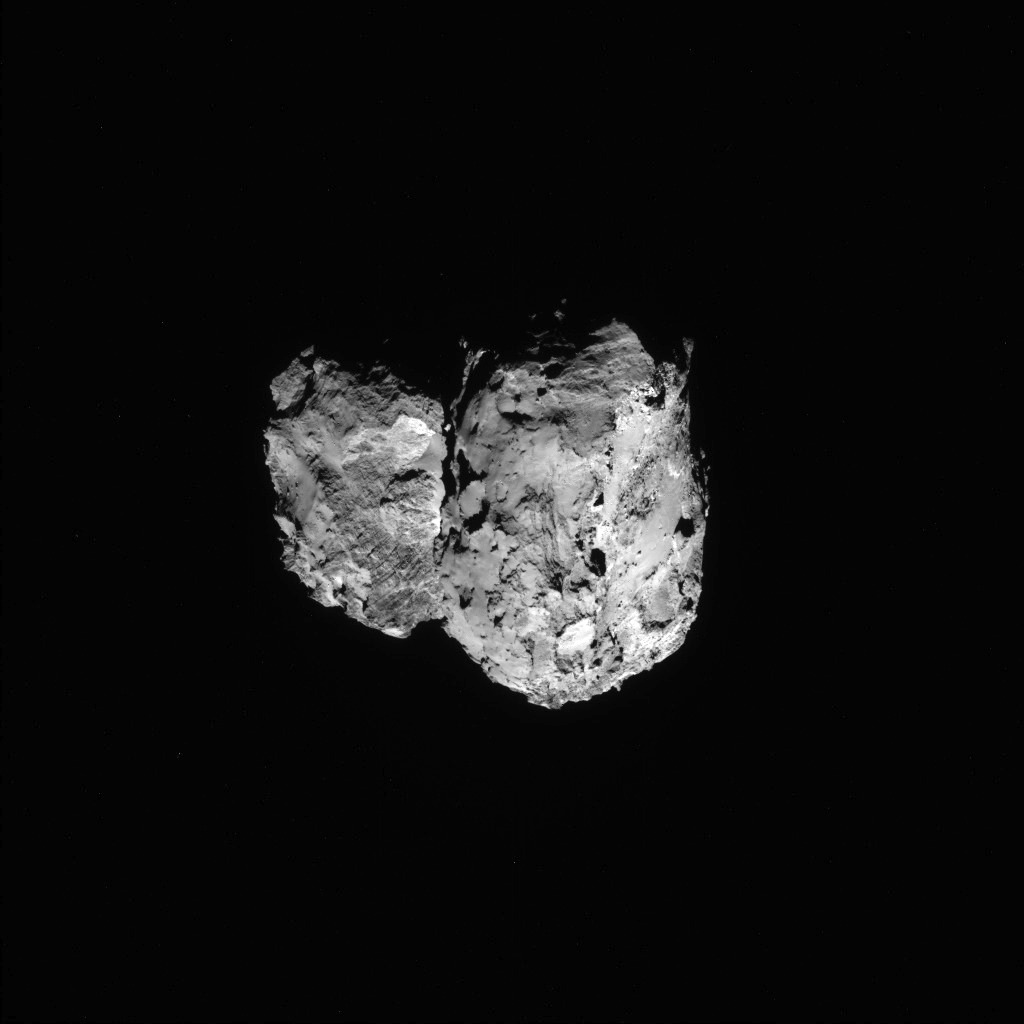
A picture of Comet 67P/Churyumov-Gerasimenko. Credit: ESA/Rosetta/NAVCAM
What’s one of the first things you do when arriving at a new destination? Likely it would be scoping out the local neighborhood. Getting a sense of its terrain and the good things to do around there.
That’s part of what Rosetta’s team is working on since arriving at its comet early in the morning of Aug. 6 (Eastern time). While only a few pictures have been beamed back to the public so far of Comet 67P/Churyumov-Gerasimenko, the glimpses of its surface are tantalizing. Which is important, because a little spacecraft is on its way there.
As the team busily calibrates its instruments and snaps pictures of the surface, one of their first tasks will be to pick a landing site for Philae, the machine that is scheduled to leave Rosetta and actually touch softly down on the surface in November. This is the first time such a soft-landing has been attempted, and it’s been a long decade of waiting for the scientists who sent the two spacecraft on their way.
Picking a spot will be difficult for the team, they explained last week. The gravity is light and the terrain is not only difficult to navigate, but also hard to choose from. Would you prefer a crater or a cliff? That will be what science investigators will examine in the coming months.
As they do that, check out the latest pictures of the comet in the gallery below.
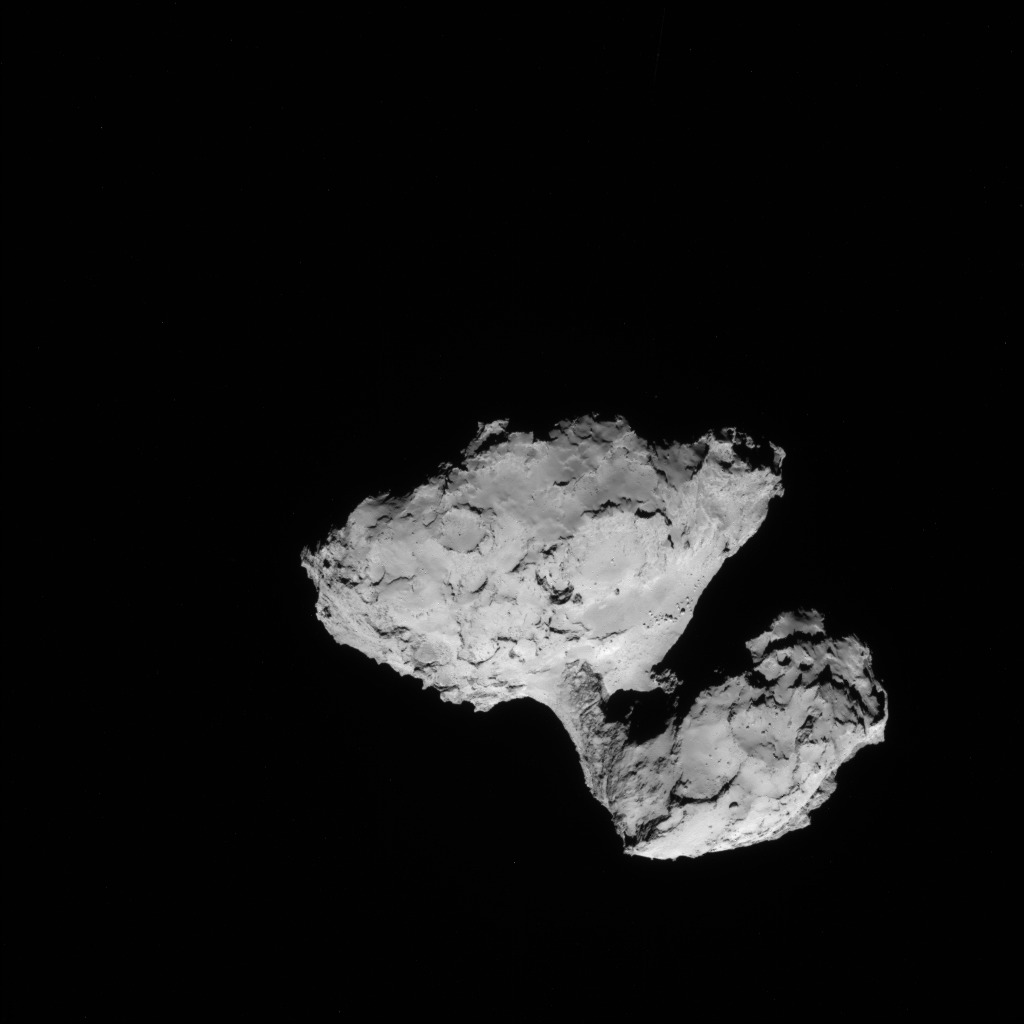
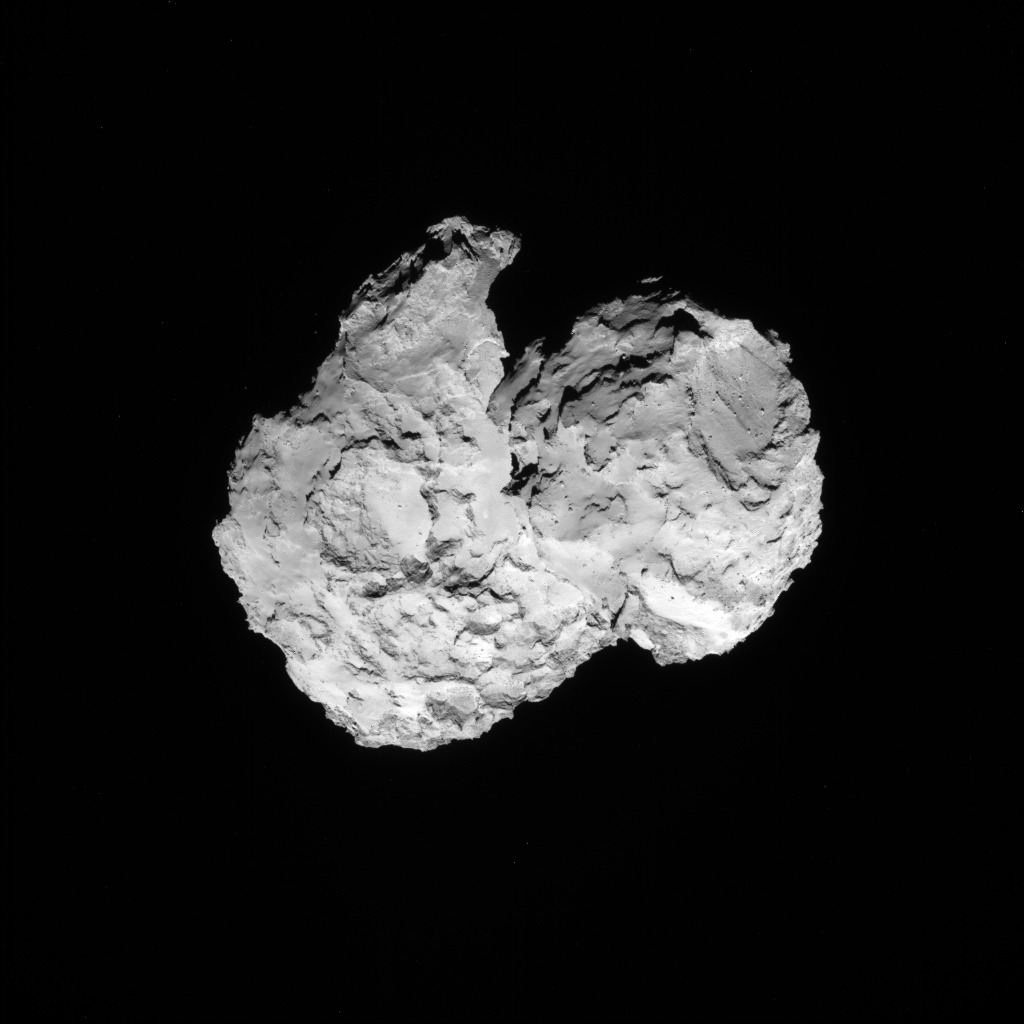
A view of Comet 67P/Churyumov-Gerasimenko taken by the Rosetta spacecraft on Aug. 9, 2014. Credit: ESA/Rosetta/NAVCAMA dark hollow beckons in this picture of Comet 67P/Churyumov-Gerasimenko taken by the Rosetta spacecraft Aug. 5, 2014. Credit: ESA/Rosetta/NAVCAMThe Rosetta spacecraft captured the “rubbe duckie” shape of Comet 67P/Churyumov-Gerasimenko on Aug. 6, 2014. Credit: ESA/Rosetta/NAVCAMThe mottled surface of Comet 67P/Churyumov-Gerasimenko beckons in this picure taken by the Rosetta spacecraft on Aug. 7, 2014. Credit: ESA/Rosetta/NAVCAM
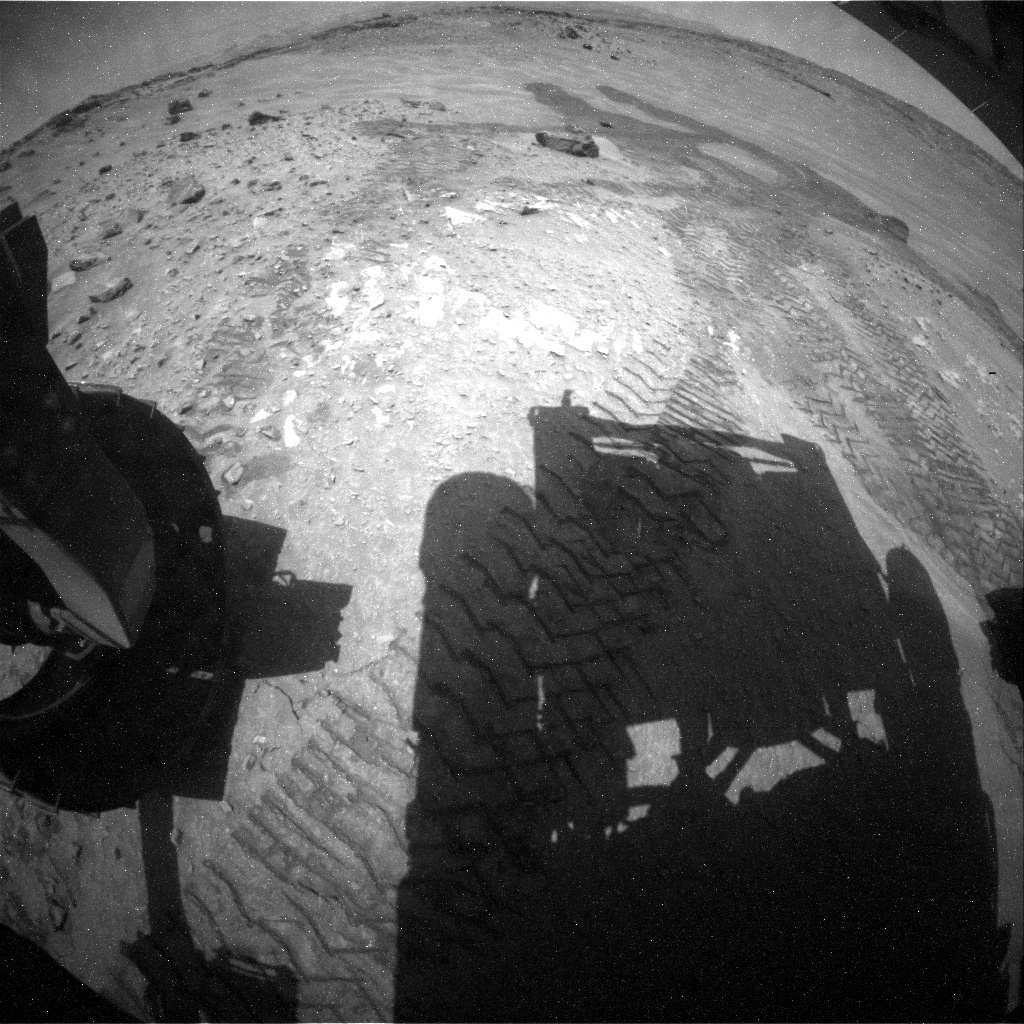
NASA's Curiosity rover looks across a rock field in this raw picture from Mars taken Aug. 8, 2014. Credit: NASA/JPL-Caltech
This picture alone illustrates the challenge NASA has as it slowly moves the Curiosity rover across Mars to its mountainous destination. You can see rocks surrounding the rover on Sol 713 (on Aug. 8), which is a challenge because of the ongoing wear and tear on Curiosity’s aluminum wheels.
In mid-July, Curiosity crossed one of the most difficult stretches of terrain yet since NASA spotted the damage and took measures to mitigate further problems, which includes picking out the smoothest terrain possible for its rover — which just celebrated two years on the Red Planet.
“For about half of July, the rover team at NASA’s Jet Propulsion Laboratory in Pasadena, California, drove Curiosity across an area of hazardous sharp rocks on Mars called ‘Zabriskie Plateau’,” NASA wrote in a recent press release.
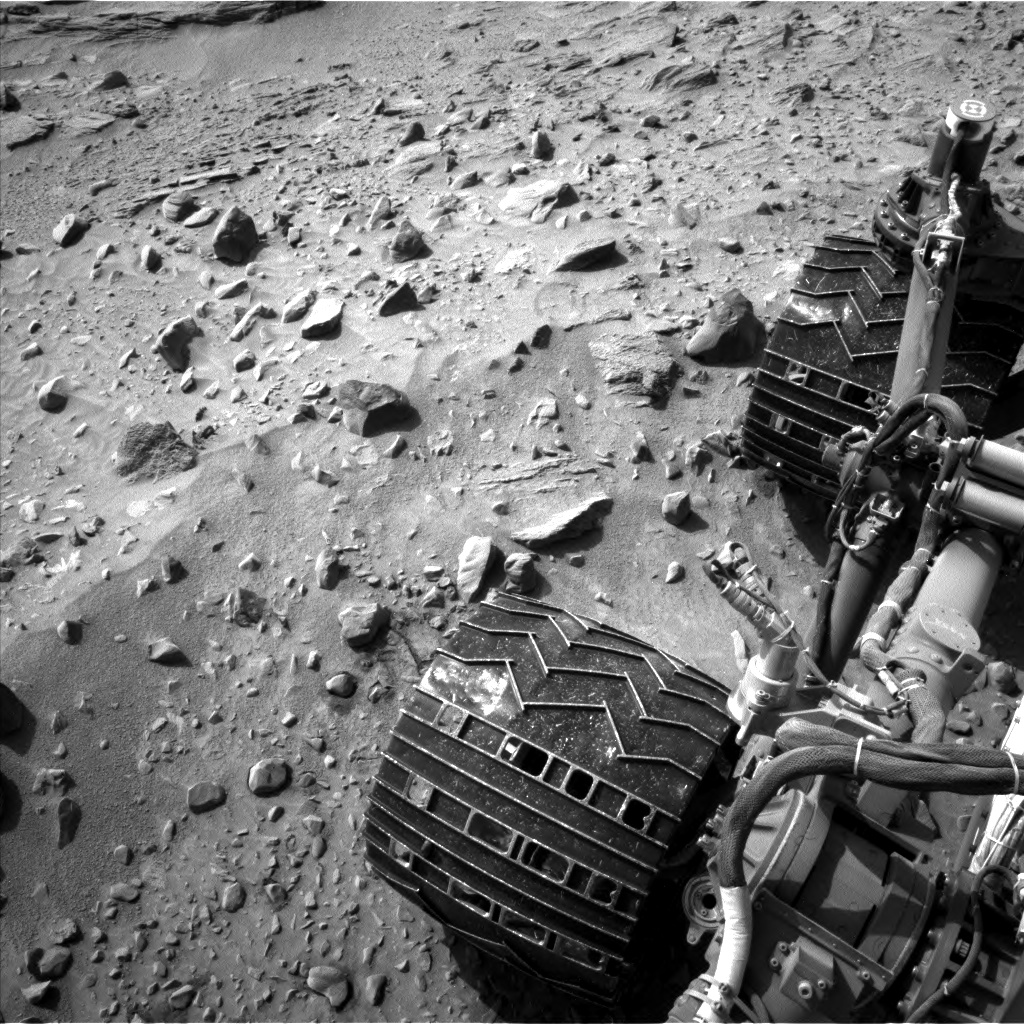
A closeup of Curiosity’s wheels on Mars on Aug. 9, 2014. Credit: NASA/JPL-Caltech
“Damage to Curiosity‘s aluminum wheels from driving across similar terrain last year prompted a change in route, with the plan of skirting such rock-studded terrain wherever feasible. The one-eighth mile (200 meters) across Zabriskie Plateau was one of the longest stretches without a suitable detour on the redesigned route toward the long-term science destination.”
The rover is planning to make its way up the slope of science destinations on Mount Sharp, which is about two miles (3 kilometers) away. NASA pointed out that an interim stop for the rover will take place less than a third of a mile away (500 meters).
“The wheels took some damage getting across Zabriskie Plateau, but it’s less than I expected from the amount of hard, sharp rocks embedded there,” added Jim Erickson, project manager for Curiosity at NASA’s Jet Propulsion Laboratory, in a statement.
A low view of the terrain taken by the Mars Curiosity rover in August 2014. Credit: NASA/JPL-Caltech
“The rover drivers showed that they’re up to the task of getting around the really bad rocks. There will still be rough patches ahead. We didn’t imagine prior to landing that we would see this kind of challenge to the vehicle, but we’re handling it.”
Curiosity has driven out of its landing ellipse and will continue the trek to the mountain, stopping to perform science along the way.
NASA plans to heavily borrow from Curiosity’s design for its next rover, called Mars 2020. The science instruments for that rover were selected last week. While Curiosity was made to seek potentially habitable environments in the past or present, Mars 2020 will have the capability to search for organic materials that could indicate precursors to life.
The Mars Curiosity rover leaves tracks in the sand in this picture taken Aug. 9, 2014. Credit: NASA/JPL-CaltechA shadow of Mars Curiosity lies across the surface in this picture taken Aug. 9, 2014. Credit: NASA/JPL-Caltech
The "super moon" of August 2014 captured by Expedition 40's Oleg Artemyev on the International Space Station. Credit: OlegMKS / Twitter
With the full Moon approaching just a little bit closer than Earth to usual, a cosmonaut on the International Space Station took a few moments of his time to capture a few shots of it setting behind the Earth. Oleg Artemyev was just a shade closer to that Moon than the rest of us, and the sequence of pictures (below the jump) is stunning.
As Universe Today’s David Dickinson explained last week, the so-called “supermoon” refers to a phenomenon where the full Moon falls within 24 hours of perigee (closest approach to the Earth.) We’re in a cycle of supermoons right now, with this weekend’s the second in a three-part cycle this year.
The Moon appears about 14% bigger between its furthest and closest approaches to Earth. While the difference is subtle in the sky, it does produce higher tides on Earth (with an example being Hurricane Sandy in 2012.)
Technically the perigee happened August 10 at 6:10 p.m. UTC (2:10 p.m. EDT), but people (including Artemyev) took several pictures of the moon a bit before and after that time. One example from our Universe Today Flickr pool is at the bottom of this post. You can see more examples on Flickr.
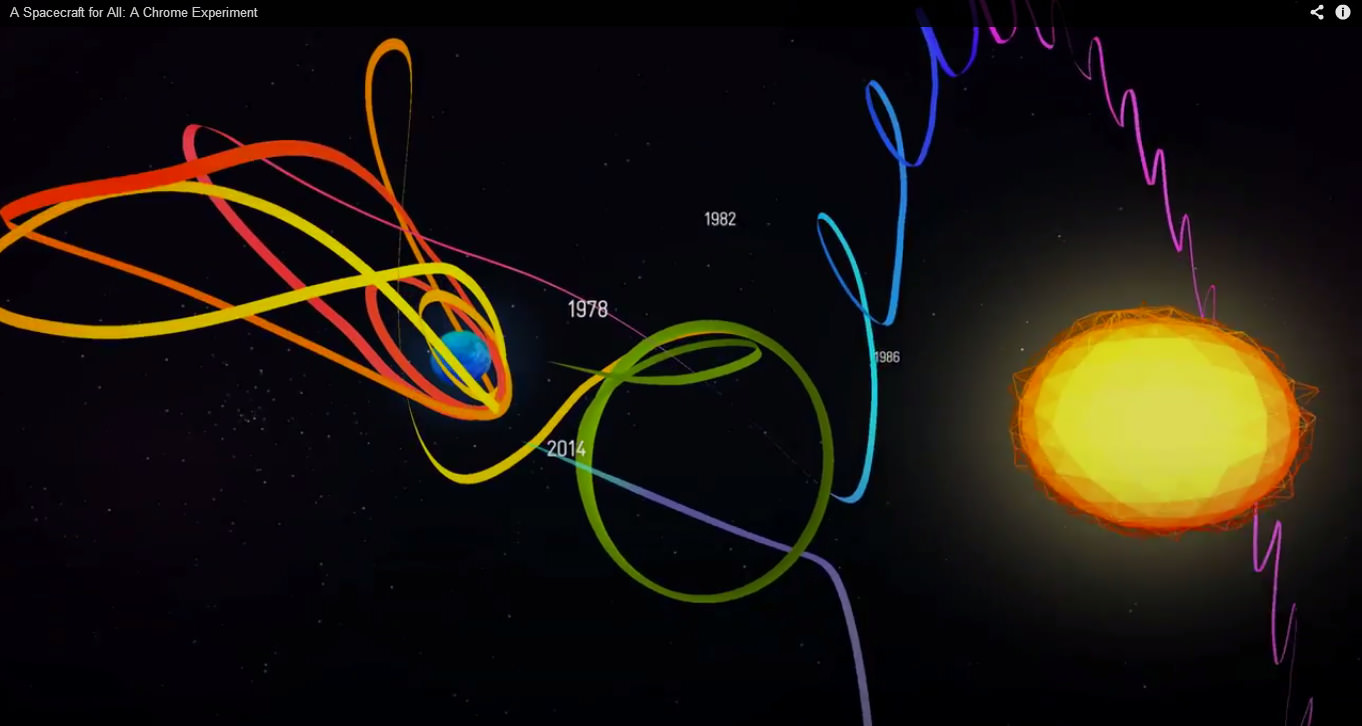
An Illustration of the ISEE-3 trajectory around the Earth, Moon and Sun. (Credits: Google Creative Labs, Skycorp Inc., Space Exploration Engineering)
The journey began on August 12, 1978 from Cape Canaveral on a Delta II launch vehicle. Now after 36 years and 30 billions miles of travel around the Sun — as well as a crowd-funded reboot of the spacecraft and a foiled attempt to put it into Earth orbit — the ISEE-3 has completed a return visit to the Earth-Moon system.
The spacecraft made its closest approach to the Earth on August 9 and flyby of the Moon, August 10, 2014. Closest approach was 15,600 km (9693 miles) from the Moon’s surface. With the lunar flyby, Skycorp, Inc. of Mountain View, California, with help from Google Creative Labs, has announced a revised mission for ISEE-3 to deliver science to the public domain.
ISEE-3 has marked several important milestones and achievements for NASA over the five decades in which it has traveled and monitored the particles and fields between the Earth and the Sun. Its latest milestone – returning to Earth, was planned and refined over 30 years ago. However, with NASA no longer interested in recovering the spacecraft because of the limitations of its present budgets, its impending return would be with no fanfare, no commanding, no recovery into Earth orbit and no new mission. With the news that NASA could not afford a recovery, space enthusiasts began to talk. Retired and active aerospace engineers began to exchange ideas with avid HAM radio operators around the World. Finally, one group took charge. They revived the vintage spacecraft and has now designed a new mission for the it.
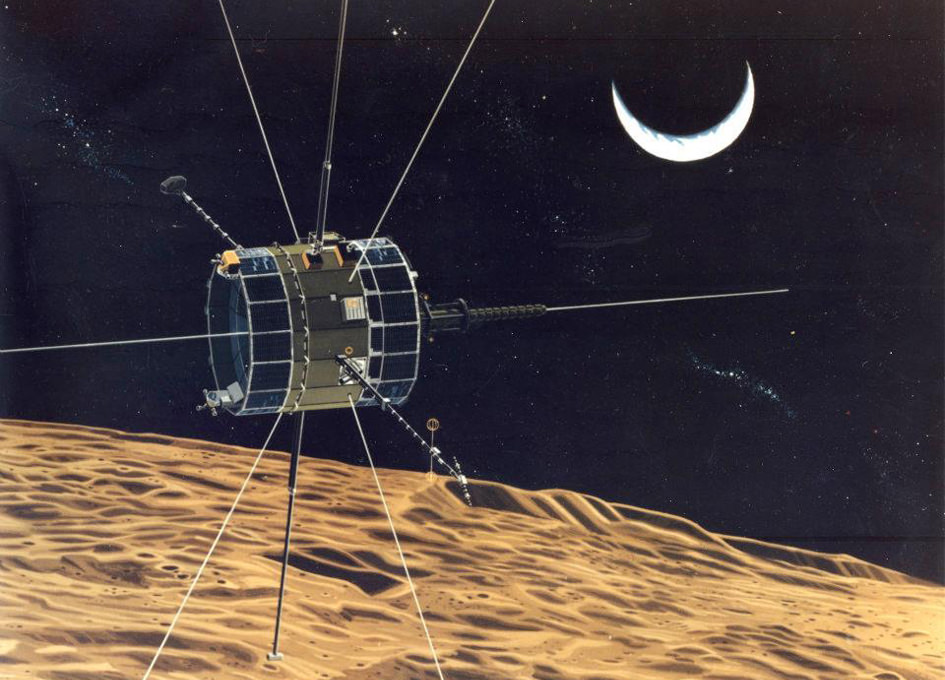
NASA illustration of the ISEE-3 fly by the Moon, 1982. On August 10, 2014, ISEE-3 will fly within 15,600 km (9693 miles) above the Moon’s surface.
Enter Dennis Wingo and Austin Epps of Skycorp, Inc. Residing in an abandoned McDonald’s drive-thru on Moffett Field in Mountain View, California, they began a journey in March to recover the spacecraft. First off, before any recovery attempt could be undertaken, it required original documentation, so Dennis with assistance from Keith Cowing began contacting original ISEE-3 engineers, calling, knocking on NASA doors and finally began signing NASA space act agreements to have the documents released into their possession. And what fascinating documents they were.
Written long before the internet, before the first personal computers and when computer punch cards and main frames were the means to program and command spacecraft, most of the ISEE-3 documents resided as printed documents only, on none other than paper, yellowing and old, doomed to eventually rot away in modest storage rooms. Some had been converted to the modern archive format, Adobe’s PDF file format. This was the beginning of revival of a working knowledge to command the spacecraft. It was very sketchy but in about 90 days, documents appeared, documents were scanned to PDFs, searched and the team prepared for the recovery attempt.
Key personnel of the ISEE-3 Reboot Project. From left, Casey Harper, Cameron Woodman, Austin Epps, Jacob Gold, Balint Seeber, Keith Cowing, Dennis Wingo, Marco Colleluori and Ken Zin. (Photo credit, Google Creative Labs)
The team grew rapidly and as the Beatles song goes, Skycorp got by with a little help from their friends. Actually, a lot of help from their friends. First, there was a crowd funding effort. Thousands of individuals from around the globe contributed to a final crowd funding purse of about $160,000. This is in contrast to the $100 million or much more that is required to reach just the launch date of a NASA mission.
Next, the people that had been exchanging comments on blogs (e.g. Planetary blog post on ISEE-3) began making themselves available, no charge, providing decades of accrued experience in spacecraft design and operation and other very relevant expertise. There were original NASA engineers, Robert Farquhar and David Dunham, Warren Martin, Bobby Williams, and Craig Roberts. HAM radio operators appeared or were contacted from as far as England (AMSAT-UK), Germany(Bochum Obs.) and as nearby as the SETI Institute in Mountain View, California. All this expertise, working knowledge and capable hardware had to converge very rapidly. By the latter half of May, they were ready.
The operators of the venerable Arecibo Radio Telescope offered their expertise and its 1000 foot radio dish for communication purposes. And an absolutely critical solution was found to replace the lack of any existing transmitter that could communicate with the old 40 year old technology. NASA had retired and scrapped the original Deep Space Network equipment. So technology developed by Ettus Research Corp. of Santa Clara, California was identified as a possible replacement for the non-existent transmitter. Ettus proposed a combination of open source software called Gnu Radio configured to work with Ettus developed Universal Software Radio Peripheral (USRP) platforms as the solution. With the Skycorp team constructing the command sequences, Ettus engineers Balint Seeber and a former engineer John Marlsbury rigged the critical substitute for a hardware transmitter and with the expertise to modulate and demodulate a radio signal, a trip to Puerto Rico and the Arecibo dish was undertaken in May.
After two weeks of some waiting on hardware and trial and error, there was success. Two-way communication was achieved and ISEE-3 truly became ISEE-3 Reboot. Further hiccups unfolded by trial and error, learning to command and receive with still less than complete working knowledge. More NASA space act agreements were necessary to permit the access to achieve success. Finally, NASA provided time on the Deep Space Network, the famous Goldstone radio dish and others in the network, famous for communicating with Apollo missions and Voyagers at the edge of the Solar System. This provided further attempts at communication that helped to resolve and understand issues. Furthermore, a Bell Labs engineer, Phil Karn Jr. (KA9Q) volunteered his expertise in late night work sessions, to demodulate and decode the incoming radio signal, to convert analog signal into 1’s and 0’s. Phil provided crucial input and energy to the ISEE-3 Reboot at a key juncture.
The ultimate goal could now be attempted – command the spacecraft to fire its rocket engines to change its trajectory and become captured by the Earth’s gravitational field. Mike Loucks of Space Exploration Engineering and engineers of Applied Defense Solutions, Inc. worked quickly to provide trajectory information and revisions. Finally, commanding ISEE-3 to fire its rockets was attempted and then attempted again and again. Skycorp concluded that father time was what was truly in command of ISEE-3’s destiny. Thirty-six years in space had taken its toll and Skycorp engineers realized that the fuel tanks had lost pressure. They could command it in all necessary ways but the spacecraft could not squeeze the fuel out of the tanks.
Recovering from this disappointment, Skycorp has arrived at today with the help of the original engineers lead by Robert Farquhar of Goddard Space Flight Center, along with the thousands through crowd funding contributions and an incredible group of volunteers. And along the way, Google Creative Labs documented the adventure and created the compendium which was delivered to the public domain last week, A Spacecraft for All. This web site provides a graphic illustration of both the ISEE-3 timeline as well as its incredible journey to explore the Sun-Earth relationship, study two comets and then undertake a 30 year journey to return to Earth on August 10, 2014.
Using the radio telescope at Morehead State University, they will continue receiving the commanded telemetry stream from the remaining viable science instruments, process the data and present it to the public and to professional researchers alike for analysis. While ISEE-3 could not be recovered into an Earth orbit as Farquhar had hoped decades ago, it will continue its journey around the Sun and return to the vicinity of the Earth in 2029. How long telemetry from ISEE-3 can be received as it travels away from the Earth remains to be seen, and keeping in contact with it will be a challenge for its new operators in the months ahead.
SNC's Dream Chaser® orbital structural airframe at Lockheed Martin in Ft. Worth, Texas. Credit: Lockheed Martin
The orbital airframe structure for the first commercial Dream Chaser mini-shuttle that will launch to Earth orbit just over two years from now has been unveiled by Sierra Nevada Corporation (SNC) and program partner Lockheed Martin.
Sierra Nevada is moving forward with plans for Dream Chaser’s first launch and unmanned orbital test flight in November 2016 atop a United Launch Alliance (ULA) Atlas V rocket from Cape Canaveral, Florida.
Dream Chaser commercial crew vehicle built by Sierra Nevada Corp docks at ISS
Lockheed Martin is fabricating the structural components for the Dream Chaser’s orbital spacecraft composite structure at the NASA’s Michoud Assembly Facility (MAF) in New Orleans, Louisiana.
MAF has played a long and illustrious history in human space flight dating back to Apollo and also as the site where all the External Tanks for NASA’s space shuttle program were manufactured. Lockheed Martin also builds the pressure vessels for NASA’s deep space Orioncrew vehicle at MAF.
Each piece is thoroughly inspected to insure it meets specification and then shipped to Lockheed Martin’s Aeronautics facility in Fort Worth, Texas for integration into the airframe and co-bonded assembly.
Following helicopter release the private Dream Chaser spaceplane starts glide to runway at Edwards Air Force Base, Ca. during first free flight landing test on Oct. 26, 2013 – in this screenshot. Credit: Sierra Nevada Corp.
Sierra Nevada chose Lockheed Martin for this significant role in building Dream Chaser airframe based on their wealth of aerospace experience and expertise.
The composite airframe structure was recently unveiled at a joint press conference by Sierra Nevada Corporation and Lockheed Martin at the Fort Worth facility.
“As a valued strategic partner on SNC’s Dream Chaser Dream Team, Lockheed Martin is under contract to manufacture Dream Chaser orbital structure airframes,” said Mark N. Sirangelo, corporate vice president of SNC’s Space Systems, in a statement.
“We competitively chose Lockheed Martin because they are a world leader in composite manufacturing, have the infrastructure, resources and quality control needed to support the needs of an orbital vehicle and have a proven track record of leading our nation’s top aviation and aerospace programs. Lockheed Martin’s diverse heritage coupled with their current work on the Orion program adds an extra element of depth and expertise to our program. SNC and Lockheed Martin continue to expand and develop a strong multi-faceted relationship.”
Dream Chaser measures about 29 feet long with a 23 foot wide wing span and is about one third the size of NASA’s space shuttle orbiters.
“We are able to tailor our best manufacturing processes, and our innovative technology from across the corporation to fit the needs of the Dream Chaser program,” said Jim Crocker, vice president of Lockheed Martin’s Space Systems Company Civil Space Line of Business.
Upon completion of the airframe manufacturing at Ft Worth, it will be transported to SNC’s Louisville, Colorado, facility for final integration and assembly.
SNC announced in July that they successfully completed and passed a series of risk reduction milestone tests on key flight hardware systems under its Commercial Crew Integrated Capability (CCiCap) agreement with NASA that move the private reusable spacecraft closer to its critical design review (CDR) and first flight.
As a result of completing Milestones 9 and 9a, SNC has now received 92% of its total CCiCAP Phase 1 NASA award of $227.5 million.
“We are on schedule to launch our first orbital flight in November of 2016, which will mark the beginning of the restoration of U.S. crew capability to low-Earth orbit,” says Sirangelo.
The private Dream Chaser is a reusable lifting-body design spaceship that will carry a mix of cargo and up to a seven crewmembers to the ISS. It will also be able to land on commercial runways anywhere in the world, according to SNC.
Dream Chaser is among a trio of US private sector manned spaceships being developed with seed money from NASA’s Commercial Crew Program in a public/private partnership to develop a next-generation crew transportation vehicle to ferry astronauts to and from the International Space Station by 2017 – a capability totally lost following the space shuttle’s forced retirement in 2011.
The SpaceX Dragon and Boeing CST-100 ‘space taxis’ are also vying for funding in the next round of contracts to be awarded by NASA around September 2014, NASA officials have told me.
Stay tuned here for Ken’s continuing Sierra Nevada, Boeing, SpaceX, Orbital Sciences, commercial space, Orion, Rosetta, Curiosity, Mars rover, MAVEN, MOM and more planetary and human spaceflight news.
Scale models of NASA’s Commercial Crew program vehicles and launchers; Boeing CST-100, Sierra Nevada Dream Chaser, SpaceX Dragon. Credit: Ken Kremer/kenkremer.com
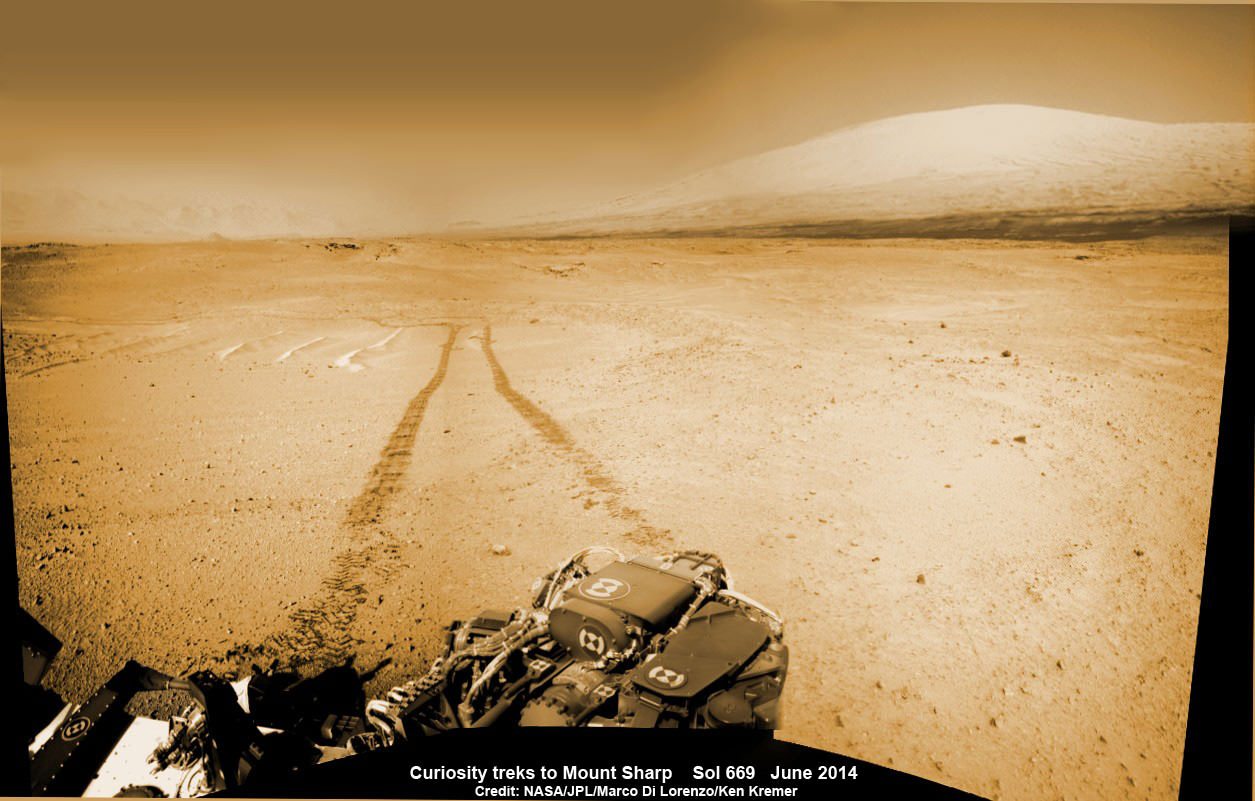
1 Martian Year on Mars! Curiosity treks to Mount Sharp in this photo mosaic view captured on Sol 669, June 24, 2014. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer – kenkremer.com
2 Years on Mars!
Curiosity treks to Mount Sharp, her primary science destination, in this photo mosaic view captured on Sol 669, June 24, 2014. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer – kenkremer.com
Story and mosaics updated[/caption]
NASA’s most scientifically powerful rover ever dispatched to the Red Planet, Curiosity, is celebrating her 2nd anniversary on Mars since the dramatic touchdown inside Gale Crater on Aug. 6, 2012, EDT (Aug. 5, 2012, PDT) while simultaneously approaching a bedrock unit that for the first time is actually part of the humongous mountain she will soon scale and is the primary science destination of the mission.
Mount Sharp is a layered mountain that dominates most of Gale Crater and towers 3.4 miles (5.5 kilometers) into the Martian sky and is taller than Mount Rainier.
Aug. 6, 2014 marks ‘2 Years on Mars’ and Sol 711 for Curiosity in an area called “Hidden Valley.”
“Getting to Mount Sharp is the next big step for Curiosity and we expect that in the Fall of this year,” Dr. Jim Green, NASA’s Director of Planetary Sciences at NASA Headquarters, Washington, DC, told me in an interview making the 2nd anniversary.
The 1 ton rover is equipped with 10 state-of-the-art science instruments and searching for signs of life.
The mysterious mountain is so huge that outcrops of bedrock extend several miles out from its base and Curiosity is now within striking distance of reaching the area the rover team calls “Pahrump Hills.”
2 Earth Years on Mars!
NASA’s Curiosity rover celebrated the 2nd anniversary on Mars at ‘Hidden Valley’ as shown in this photo mosaic view captured on Aug. 6, 2014, Sol 711. Note the valley walls, rover tracks and distant crater rim. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer-kenkremer.com/Marco Di Lorenzo
Scientists anticipate that the outcrops at “Pahrump Hills” offer a preview of a geological unit that is part of the base of Mount Sharp for the first time since landing rather than still belonging to the floor of Gale Crater.
“We’re coming to our first taste of a geological unit that’s part of the base of the mountain rather than the floor of the crater,” said Curiosity Project Scientist John Grotzinger of the California Institute of Technology, Pasadena, in a statement.
“We will cross a major terrain boundary.”
Since “Pahrump Hills” is less than one-third of a mile (500 meters) from Curiosity she should arrive soon.
In late July 2014, the rover arrived in an area of sandy terrain called “Hidden Valley” which is on the planned route ahead leading to “Pahrump Hills” and easily traversable with few of the sharp edged rocks that have caused significant damage to the rovers six aluminum wheels.
This full-circle panorama of the landscape surrounding NASA’s Curiosity Mars rover on July 31, 2014, Sol 705, offers a view into sandy lower terrain called “Hidden Valley,” which is on the planned route ahead. It combines several images from Curiosity’s Navigation Camera. South is at the center. Credit: NASA/JPL-Caltech
The sedimentary layers in the lower slopes of Mount Sharp have been Curiosity’s long-term science destination.
They are the principal reason why the science team specifically chose Gale Crater as the primary landing site based on high resolution spectral observations collected by NASA’s powerful Mars Reconnaissance Orbiter (MRO) indicating the presence of deposits of clay-bearing sedimentary rocks.
Curiosity’s goal all along has been to determine whether Mars ever offered environmental conditions favorable for microbial life. Finding clay bearing minerals. or phyllosilicates, in Martian rocks is the key to fulfilling its major objective.
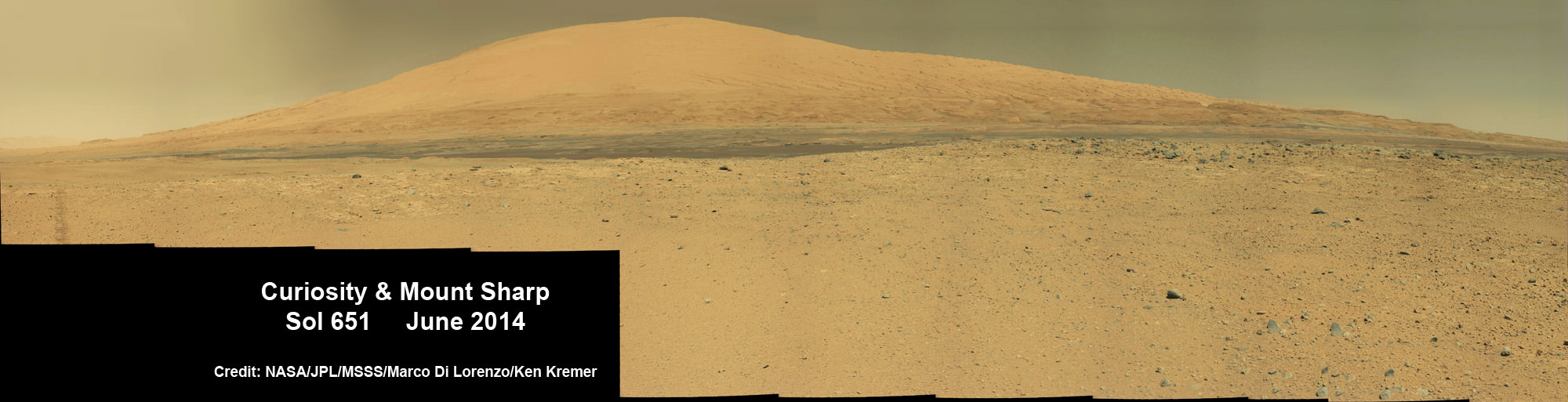
The team expected to find the clay bearing minerals only in the sedimentary layers at the lower reaches of Mount Sharp.
Curiosity rover panorama of Mount Sharp captured on June 6, 2014 (Sol 651) during traverse inside Gale Crater. Note rover wheel tracks at left. She will eventually ascend the mountain at the ‘Murray Buttes’ at right later this year. Assembled from Mastcam color camera raw images and stitched by Marco Di Lorenzo and Ken Kremer. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer-kenkremer.com
Soon after landing, the team spotted some rather interesting looking outcrops barely a half mile away from the touchdown zone at a spot dubbed ‘Yellowknife Bay” and decided to take a detour towards it to investigate.
Well the scientists won the bet and struck scientific gold barely six months after landing when they drilled into a rock outcrop named “John Klein” at “Yellowknife Bay” and unexpectedly discovered the clay bearing minerals on the crater floor.
Yellowknife Bay was found to be an ancient lakebed where liquid water flowed on Mars surface billions of years ago.
The discovery of phyllosilicates in the 1st drill sample during the spring of 2013 meant that Curiosity had rather remarkably already fulfilled its primary goal of finding a habitable zone during its first year of operations!
The rock analysis “yielded evidence of a lakebed environment billions of years ago that offered fresh water, all of the key elemental ingredients for life, and a chemical source of energy for microbes, if any existed there,” according to NASA.
Curiosity accomplished Historic 1st drilling into Martian rock at John Klein outcrop on Feb 8, 2013 (Sol 182) and discovered a habitable zone, shown in this context mosaic view of the Yellowknife Bay basin taken on Jan. 26 (Sol 169). The robotic arm is pressing down on the surface at John Klein outcrop of veined hydrated minerals – dramatically back dropped with her ultimate destination; Mount Sharp. Credit: NASA/JPL-Caltech/Ken Kremer-kenkremer.com/Marco Di Lorenzo
“Before landing, we expected that we would need to drive much farther before answering that habitability question,” said Curiosity Project Scientist John Grotzinger of the California Institute of Technology, Pasadena. “We were able to take advantage of landing very close to an ancient streambed and lake. Now we want to learn more about how environmental conditions on Mars evolved, and we know where to go to do that.”
During the rovers second Earth year on the Red Planet, Curiosity has been driving as fast as possible towards a safe entry point to the slopes of Mount Sharp. The desired destination for the car sized rover is now about 2 miles (3 kilometers) southwest of its current location.
‘Driving, Driving, Driving’ is indeed the rover teams mantra.
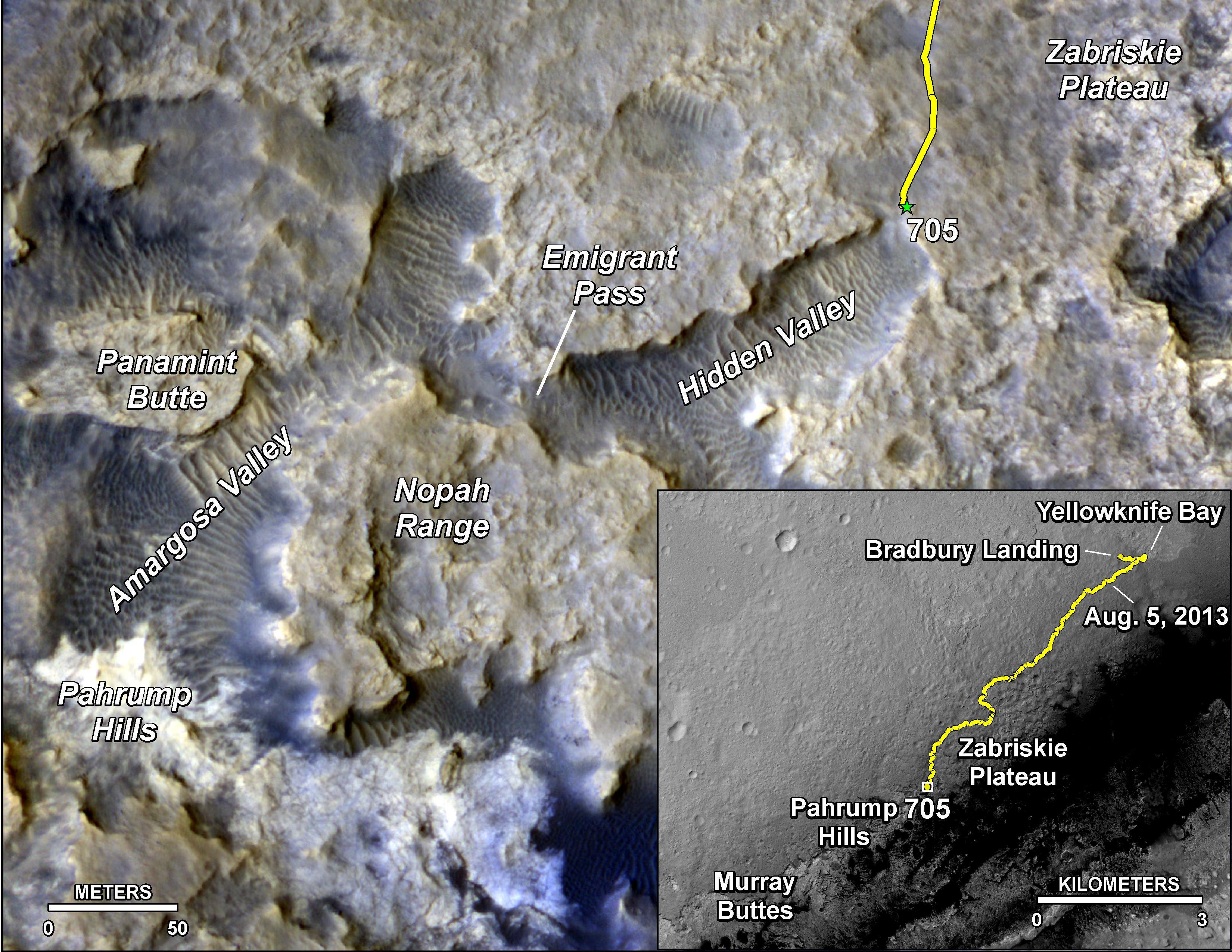
The main map here shows the assortment of landforms near the location of NASA’s Curiosity Mars rover as the rover’s second anniversary of landing on Mars nears. The gold traverse line entering from upper right ends at Curiosity’s position as of Sol 705 on Mars (July 31, 2014). The inset map shows the mission’s entire traverse from the landing on Aug. 5, 2012, PDT (Aug. 6, EDT) to Sol 705, and the remaining distance to long-term science destinations near Murray Buttes, at the base of Mount Sharp. The label “Aug. 5, 2013” indicates where Curiosity was one year after landing. Credit: NASA/JPL-Caltech/Univ. of Arizona
To date, Curiosity’s odometer totals over 5.5 miles (9.0 kilometers) since landing inside Gale Crater on Mars in August 2012. She has taken over 174,000 images.
Curiosity still has about another 2 miles (3 kilometers) to go to reach the entry way at a gap in the treacherous sand dunes at the foothills of Mount Sharp sometime later this year.
And NASA is moving forward with future Red Planet missions when it recently announced the selection of 7 instruments chosen to fly aboard the Mars 2020 rover, the agency’s next rover going to Mars that will search for signs of ancient life as well as carry a technology demonstration that will help pave the way for ‘Humans to Mars’ in the 2030s. Read my story – here.
Coincidentally, ESA’s Rosetta comet hunting spacecraft arrived in orbit at its destination Comet 67P after a 10 year voyage on the same day as Curiosity’s 2 Earth year anniversary.
Stay tuned here for Ken’s continuing Rosetta, Curiosity, Opportunity, Orion, SpaceX, Boeing, Orbital Sciences, commercial space, MAVEN, MOM, Mars and more planetary and human spaceflight news.
Up close view of hole in one of rover Curiosity’s six wheels caused by recent driving over rough Martian rocks. Mosaic assembled from Mastcam raw images taken on Dec. 22, 2013 (Sol 490). Credit: NASA/JPL/MSSS/Ken Kremer – kenkremer.com/Marco Di Lorenzo
NASA's Low-Density Supersonic Decelerator (LDSD) during a June 2014 test flight. Credit: NASA/YouTube (screenshot)
Feeling dizzy? This is what the view looked like from NASA’s next-generation Mars spacecraft as the flying saucer-shaped vehicle did a test in June.
According to the agency, the Low-Density Supersonic Decelerator (LDSD) met all of its test objectives even though the parachute didn’t deploy as planned. And in a briefing today (Aug. 8), agency officials said they have a plan to deal with the issue for the next flight, which will be in summer 2015.
“We are going to change the shape. We are going to have some structural reinforcements to make it stronger in areas that it is particularly sensitive, to
improve deployment of parachute,” said Ian Clark, the principal investigator of LDSD at NASA’s Jet Propulsion Laboratory.
With every robotic Mars mission, it appears, NASA is trying to land bigger and bigger payloads on the surface of the planet. That’s because the rovers have become more powerful over time. The latest vehicle, the Mars Science Laboratory (better known as Curiosity) included a unique crane system that was so innovative that NASA dubbed the final landing sequence “seven minutes of terror.”
“We’re really happy. We have tons and tons of data,” said Mark Adler, the project manager for LDSD at JPL. “Nothing makes us happier than data.”
Besides the busted parachute, officials said the test showed the vehicle was performing to expectations — and sometimes, even better than expected. The shape held within 1/8 of an inch (0.32 cm), which they said was very good for a 20-foot (6-meter) vehicle. Drag and stability happened as they thought. The balloon that deployed the parachute also did well, they said.
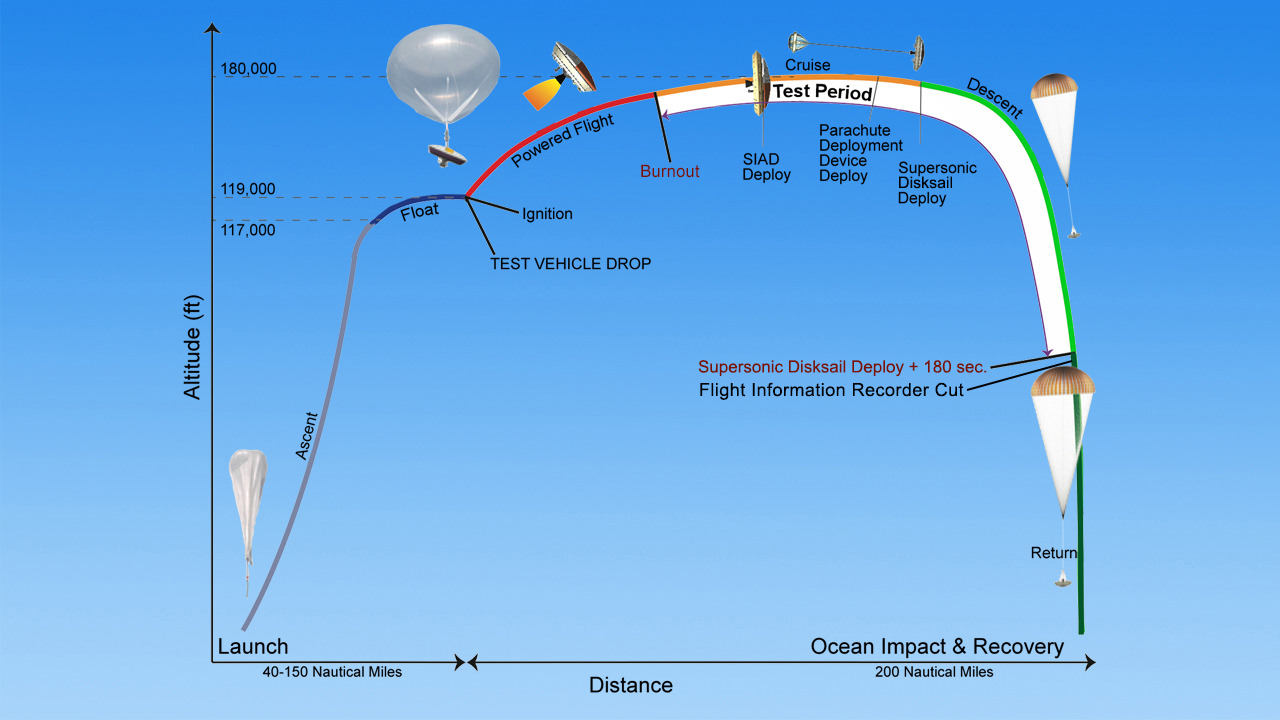
A timeline of events for a test of NASA’s Low-Density Supersonic Decelerator (LDSD). Credit: NASA/JPL-Caltech
The parachute, however, developed tears very close to the beginning of its deployment, which officials said was due to a lack of understanding about how parachutes perform at supersonic velocities.
While the LDSD has not been assigned to a particular mission yet, officials said it would be useful to land missions more accurately on the Red Planet in spots that would be more difficult to reach. It also would be useful for a future human mission, whenever that happens, because the equivalent of “two-storey condominiums”would be needed, said Adler.
The project has been in the works since September 2010, and this summer’s test occurred a year ahead of schedule.
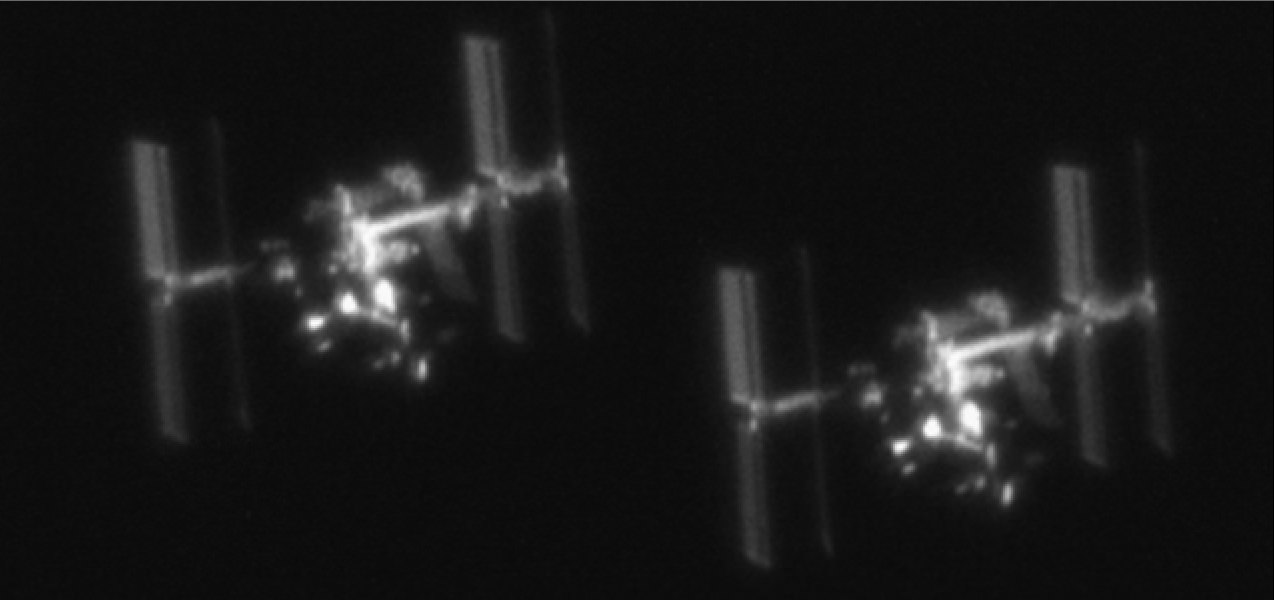
Photos of the International Space Station taken from the ground, using a 10-inch Newtonian telescope and monochromatic camera. Credit: Ralf Vandebergh
Here’s your morning photographic space delight: the International Space Station and the last European automated transfer vehicle (ATV), Georges Lemaître, taken using a camera and 10-inch Newtonian telescope.
The photographer, Ralf Vandebergh, captured these images as the ATV flew to the space station. The ATV launched flawlessly on July 30 and is expected to meet up with the station on Aug. 12. Check out pictures of the cargo vehicle below the jump.
The vehicle will stay docked to the space station for six months before making a planned re-entry in the atmosphere with a load of trash. The European Space Agency plans to track its fiery destruction to better design cargo vehicles in the future.
“The project is proceeding under our ‘Design for Demise’ effort to design space hardware in such a way that it is less likely to survive reentry and potentially endanger the public,”said Neil Murray, who is leading the project at the European Space Agency (ESA), in a July statement.
“Design for Demise in turn is part of the agency’s clean space initiative, seeking to render the space industry more environmentally friendly in space as well as on Earth.”
Pictures of the last European automated transfer vehicle going to the International Space Station in 2014. Pictures taken using a 10-inch Newtonian telescope and monochromatic camera. Credit: Ralf Vandebergh