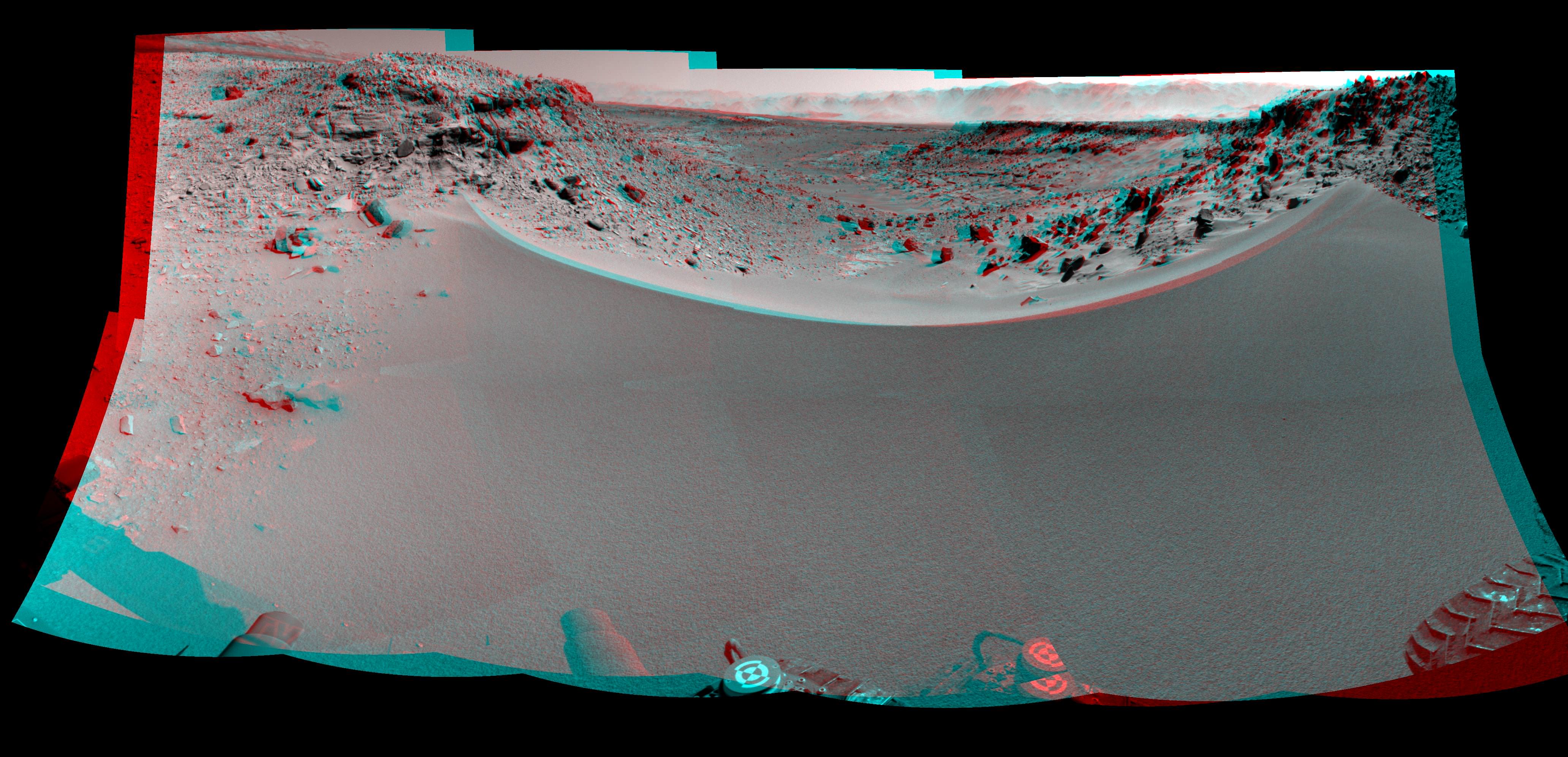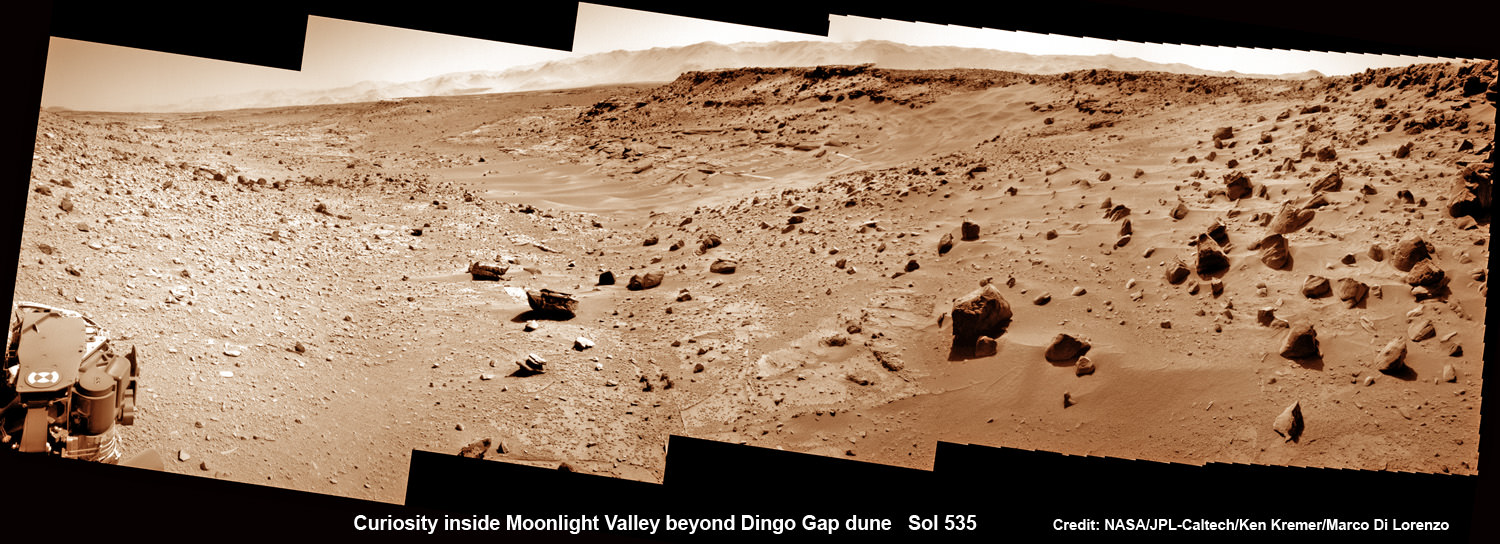
Curiosity scans Moonlight Valley beyond Dingo Gap Dune.
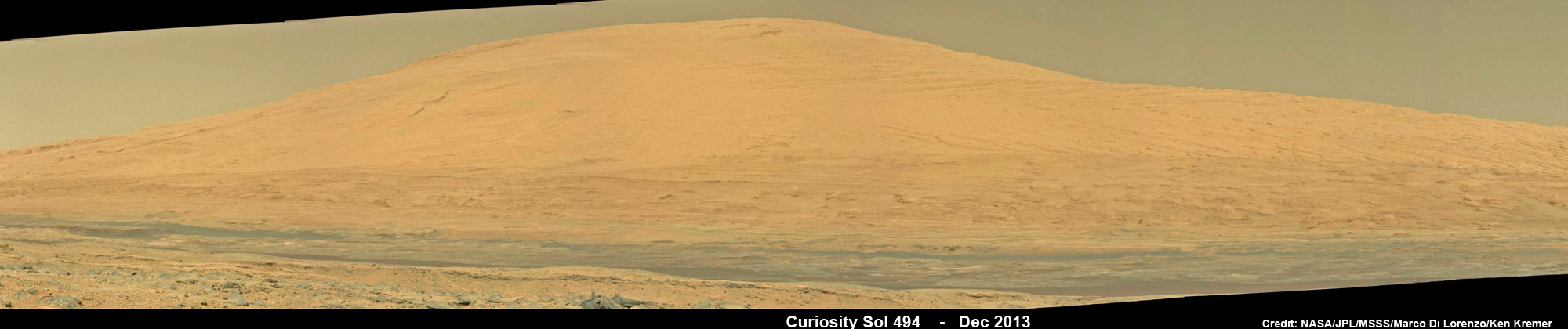
Curiosity’s view to “Moonlight Valley” beyond after crossing over ‘Dingo Gap’ sand dune. This photomosaic was taken after Curiosity drove over the 1 meter tall Dingo Gap sand dune and shows dramatic scenery in the valley beyond, back dropped by eroded rim of Gale Crater. Assembled from navigation camera (navcam) raw images from Sol 535 (Feb. 6, 2104) Credit: NASA/JPL-Caltech/Ken Kremer- kenkremer.com/Marco Di Lorenzo
See below more before/after Dingo Gap imagery
Story updated[/caption]
NASA’s Curiosity mega rover has successfully crossed over the ‘Dingo Gap’ sand dune- opening the gateway to the science rich targets in the “Moonlight Valley” and Martian mountain beyond.
“I’m over the moon that I’m over the dune! I successfully crossed the “Dingo Gap” sand dune on Mars,” Curiosity tweeted overnight Thursday.
“Moonlight Valley” is the name of the breathtaking new locale beyond Dingo, Curiosity Principal Investigator John Grotzinger, of Caltech, told Universe Today.
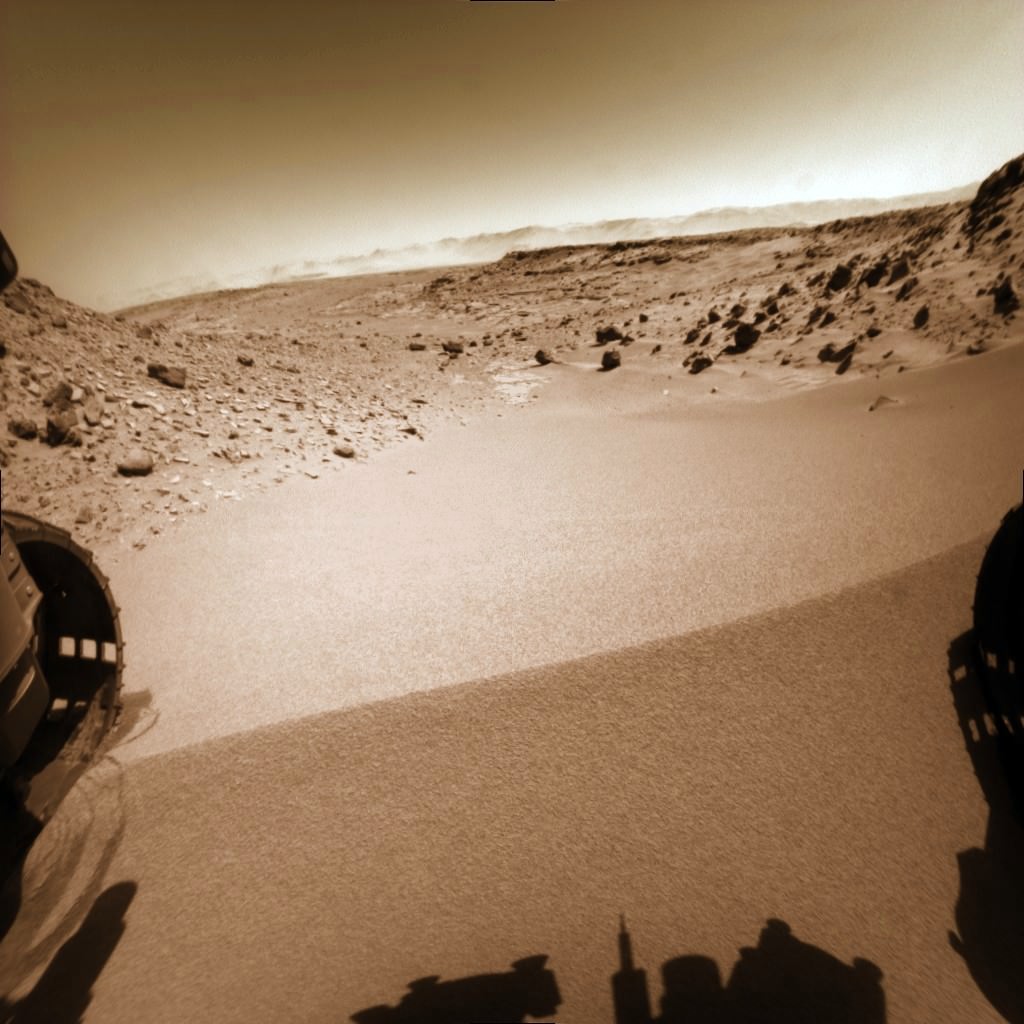
Curiosity drove westward over the 1 meter ( 3 foot) tall Dingo Gap dune in stellar style on Thursday, Feb. 6, on Sol 535.

Dramatic before and after photos reveal that the rover passed over the Red Planet dune without difficulty. They also show some interesting veins and mineral fractures are visible in the vicinity just ahead.
“Moonlight Valley has got lots of veins cutting through it,” Grotzinger told me.
“We’re seeing recessive bedrock.”
The Martian dune lies between two low scarps sitting at the north and south ends.
“The rover successfully traversed the dune in Dingo Gap,” wrote science team member Ken Herkenhoff in an update.
“The data look good.”

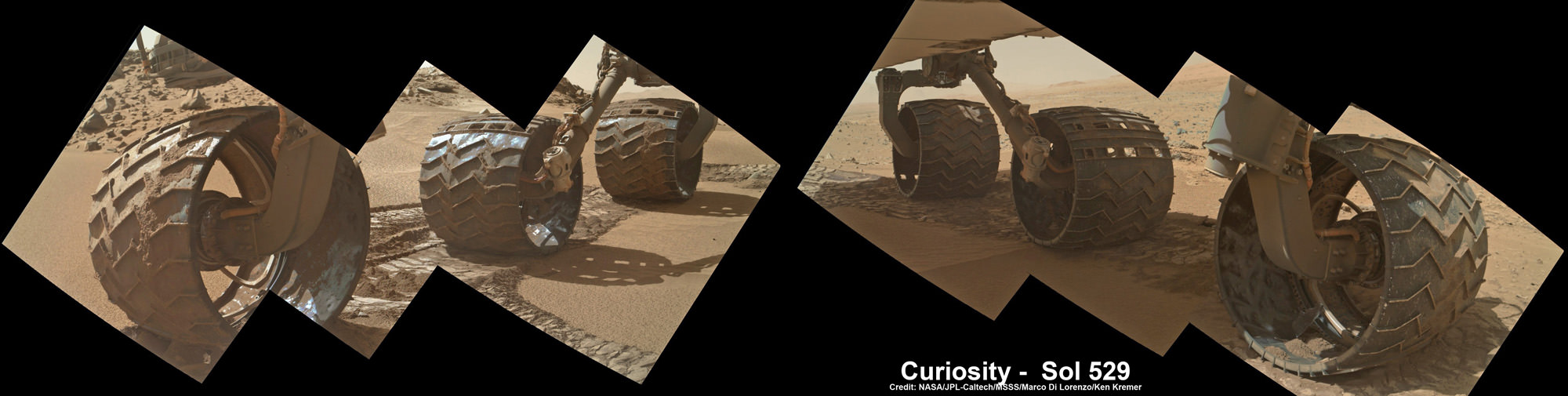
Since arriving at the picturesque “Dingo Gap” sand dune about a week ago, Curiosity’s handlers had pondered whether to breach the dune as an alternate pathway into the smoother terrain of the valley beyond as a work around to avoid fields of rough rocks that have been ripping holes into the robots six aluminum wheels in recent months.
“We’re guessing it will be softer on the wheels,” Grotzinger informed me.
Before giving the go ahead to move forward, engineers took a few days to carefully assess the dune’s integrity and physical characteristics with the rovers science instruments and cameras to insure there wasn’t the potential to get irretrievably stuck in a deep sand trap.
The team even commanded Curiosity to carry out a toe dip by gently rolling the 20 inch (50 cm) diameter wheels back and forth over the crest on Tuesday, Feb. 4 to insure it was safe to mount.
They won’t take any chances with safety, recalling that rover Spirit’s demise occurred when she because mired in a hidden sand trap in 2010 from which there was ultimately no escape. She froze to death during the bitter Martin winter – more than 6 years into her 90 day mission.
Opportunity also got wedged at the seemingly endless dune field at “Purgatory Dune”, that nearly doomed her early in the now decade long trek. Engineers spent weeks on the extrication effort.
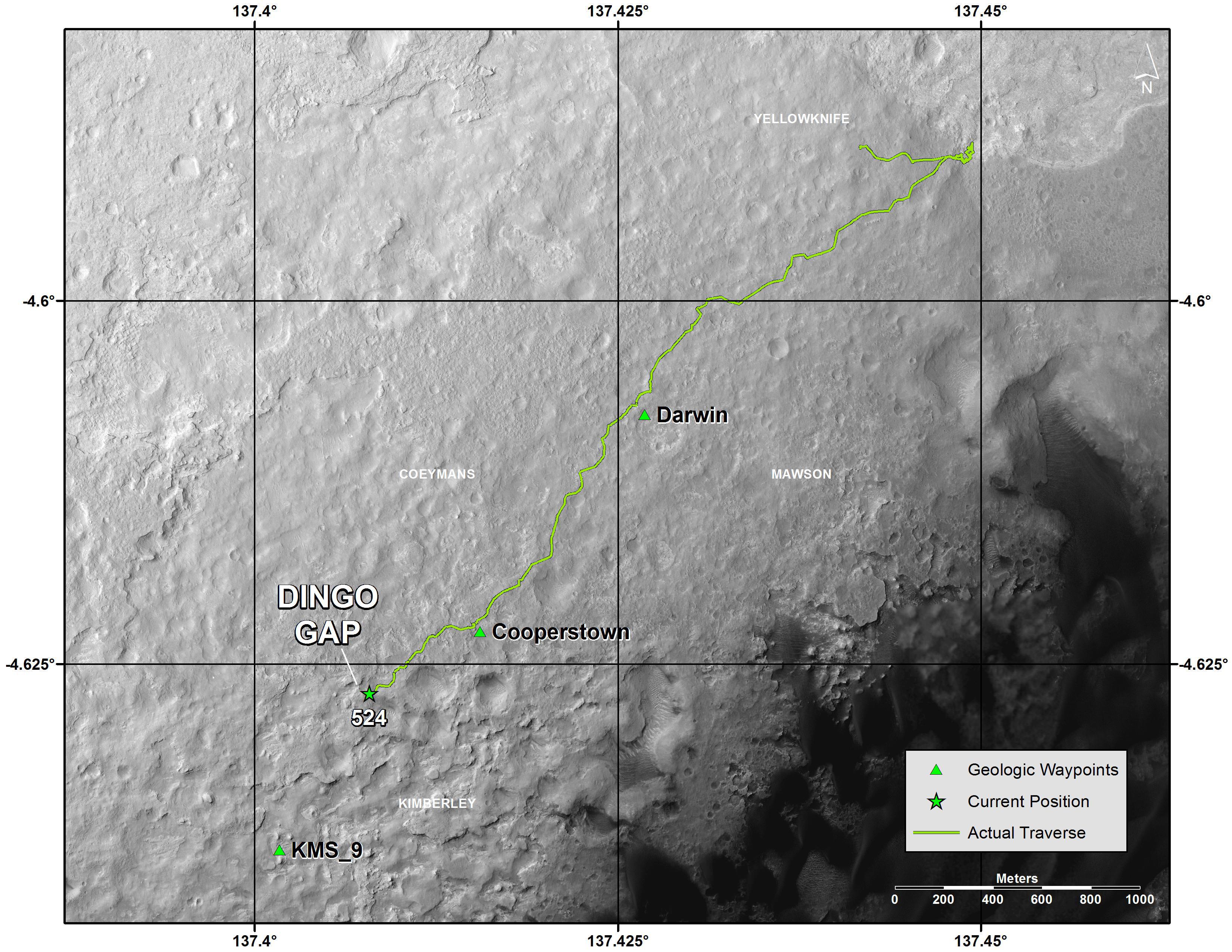
Since last summer, Curiosity has been traveling on a southwestward route to the breathtaking foothills of Mount Sharp, her ultimate science destination.
The westward route though Dingo will soon lead Curiosity to a spot dubbed “KMS-9” where the team hopes to conduct the first rock drilling operations since departing the Yellowknife Bay quadrant in July 2013, into areas of intriguing bedrock.
“At KMS-9, we see three terrain types exposed and a relatively dust-free surface,” said science team collaborator Katie Stack of the California Institute of Technology, Pasadena.
The missions science focus has shifted to “search for that subset of habitable environments which also preserves organic carbon,” says Curiosity Principal Investigator John Grotzinger, of the California Institute of Technology in Pasadena.
But first, with the dune now safely in the rear view mirror, the team plans a busy weekend of research activities.
A big science program using the X-Ray spectrometer and high resolution MAHLI camera on the robotic arm is already planned for this weekend.
“The arm will be deployed to investigate some interesting veins or minerals filling fractures in front of the rover,” says Herkenhoff.
“ChemCam will search for frost early on the morning of Sol 538 (Saturday), then analyze targets Collett and Mussell along the vein/fracture fill later in the day.”
Thereafter Curiosity will continue on its journey across the floor of Gale Crater, taking images and atmospheric measurements along the way to the sedimentary layers at the base of Mount Sharp.
Curiosity has already accomplished her primary goal of discovering a habitable zone on Mars that could support Martian microbes if they ever existed.
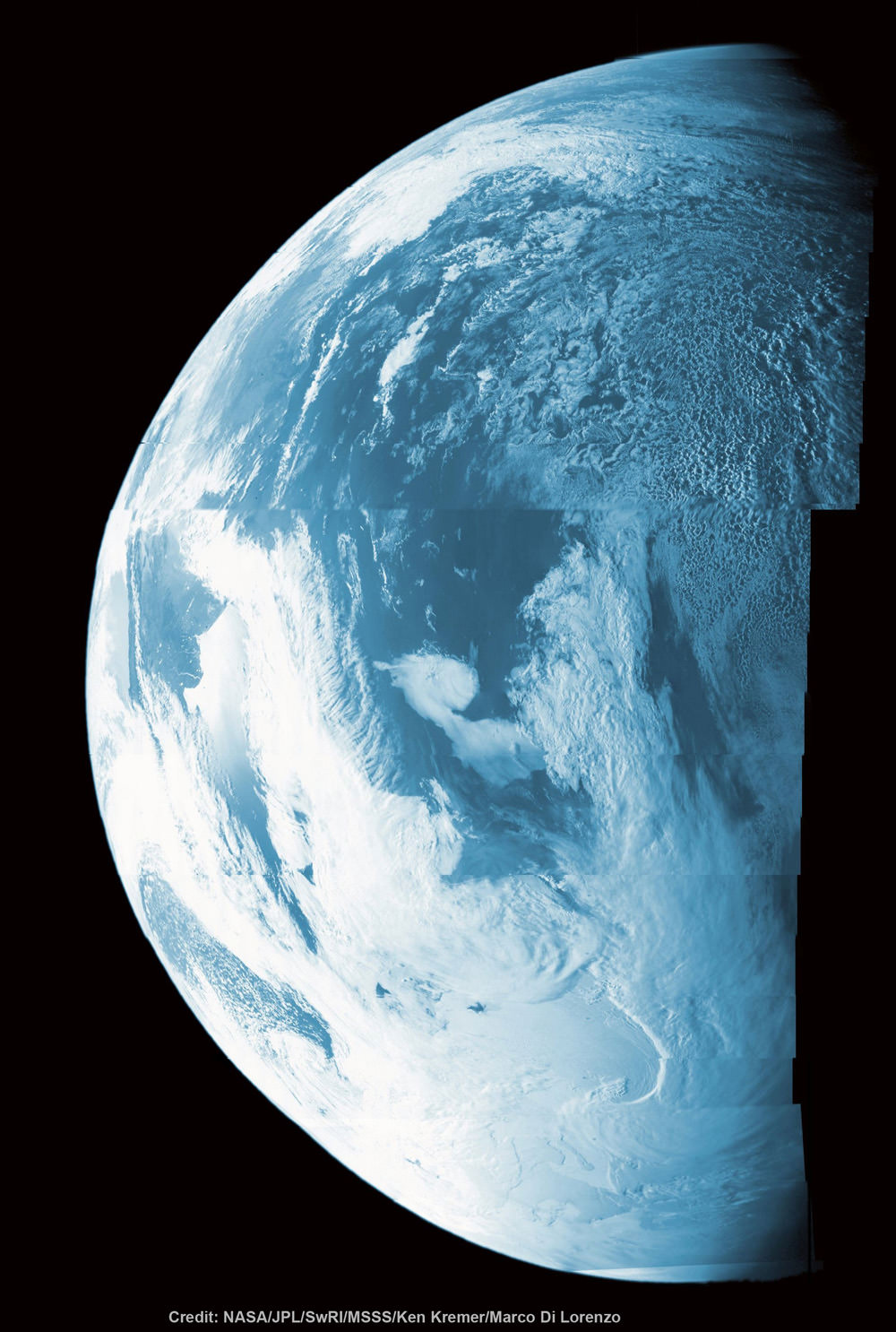
And be sure to check out Curiosity’s first ever image of Earth from Mars in my new story – here.
To date Curiosity’s odometer stands at nearly 5 kilometers and she has taken over 118,000 images.
The robot has about another 5 km to go to reach Mount Sharp.
Meanwhile, NASA’s sister Opportunity rover is exploring clay mineral outcrops by the summit of Solander Point on the opposite side of Mars at the start of her 2nd Decade investigating the Red Planet’s mysteries.
And a pair of new orbiters are streaking to the Red Planet to fortify Earth’s invasion fleet- NASA’s MAVEN and India’s MOM.
Stay tuned here for Ken’s continuing Curiosity, Opportunity, Chang’e-3, SpaceX, Orbital Sciences, LADEE, MAVEN, MOM, Mars and more planetary and human spaceflight news.
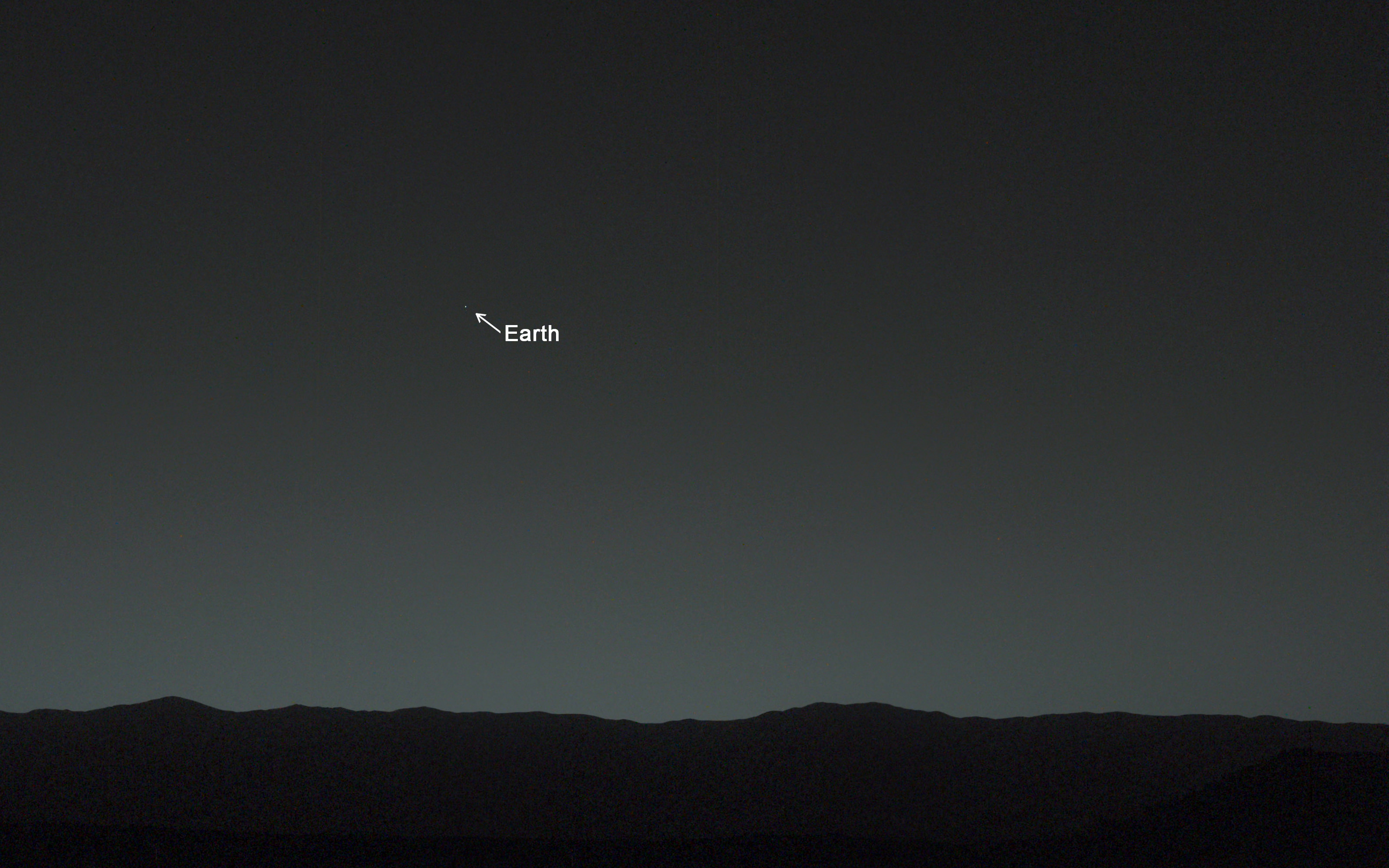
This evening-sky view taken by NASA’s Mars rover Curiosity shows the Earth and Earth’s moon as seen on Jan. 31, 2014, or Sol 529 shortly after sunset at the Dingo Gap inside Gale Crater. Credit: NASA/JPL-Caltech/MSSS/TAMU
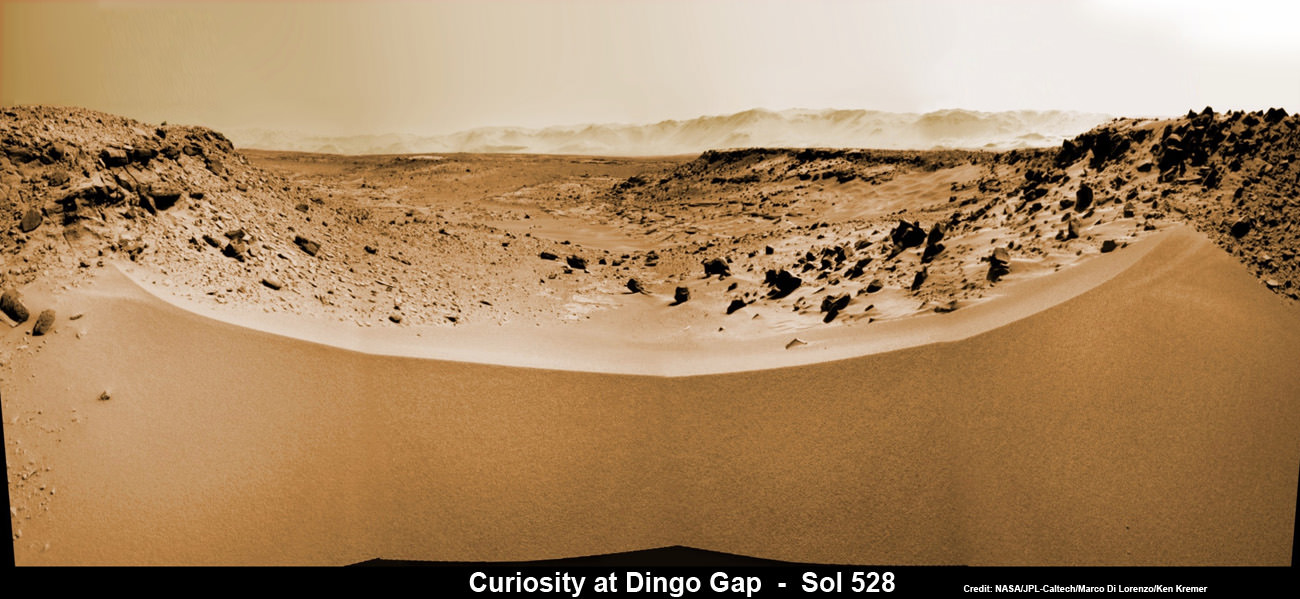
This photomosaic from Curiosity’s Navigation Camera (Navcam) taken at the edge of the entrance to the Dingo Gap shows a 3 foot (1 meter) tall dune and valley terrain beyond to the west, all dramatically back dropped by eroded rim of Gale Crater. View from the rover’s overlook position on Sol 528 (Jan. 30, 2014). The rover team has now commanded Curiosity to bridge the dune gap as a smoother path to next science destination. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer- kenkremer.com