Air glow (along with a lightning sprite) is visible in this image from the International Space Station. Credit: NASA
A bright red sprite appears above a lightning flash in a photo captured from the ISS
Back on April 30, Expedition 31 astronauts aboard the ISS captured this photo of a red sprite hovering above a bright flash of lightning over Myanmar. Elusive atmospheric phenomena, sprites are extremely brief bursts of electromagnetic activity that are associated with powerful lightning discharges, but exactly how and why they form isn’t yet known — although recent research (along with some incredible high-speed video) is shedding new light on sprites.
Although the appearance of bright high-altitude flashes above thunderstorms have been reported by pilots for nearly a century, it wasn’t until 1989 that a sprite was captured on camera — and the first color image of one wasn’t taken until 1994.
So-named because of their elusive nature, sprites appear as several clusters of red tendrils above a lighting flash followed by a breakup into smaller streaks, often extending as high as 55 miles (90 km) into the atmosphere. The brightest region of a sprite is typically seen at altitudes of 40-45 miles (65-75 km).
Because they occur above storms, only last for a thousandth of a second and emit light in the red portion of the visible spectrum (to which our eyes are the least sensitive) studying sprites has been notoriously difficult for atmospheric scientists. Space Station residents may get great views but they have lots of other things to do in the course of their day besides sprite hunting! Luckily, a team of scientists were able to capture some unprecedented videos of sprites from airplanes in the summer of 2011, using high-speed cameras and help from Japan’s NHK television.
Chasing storms over Denver via plane for two weeks, researchers were able to locate “hot zones” of sprites and capture them on camera from two planes flying 12 miles apart. Combining their videos with ground-based measurements they were able to create 3-dimensional maps of the formation and evolution of individual sprites.
Based on the latest research, it’s suggested that sprites form as a result of a positive electrical charge within a lightning strike that reaches the ground, which leaves the top of the cloud negatively charged — a one-in-ten chance that then makes conditions above the cloud “just right” for a sprite to form higher in the atmosphere.
“Seeing these are spectacular,” said Hans C. Stenbaek-Nielsen, a geophysicist at the University of Alaska in Fairbanks, Alaska, where much sprite research has been conducted. “But we need the movies, because not only are they so fast that you could blink and miss them, but they emit most of their light in red, where the human eye is relatively blind.”
An example of how energy can be exchanged between lower and higher regions of Earth’s atmosphere, it’s been suggested that sprites could also be found on other planets as well, and may provide insight into the exotic chemistries of alien atmospheres.
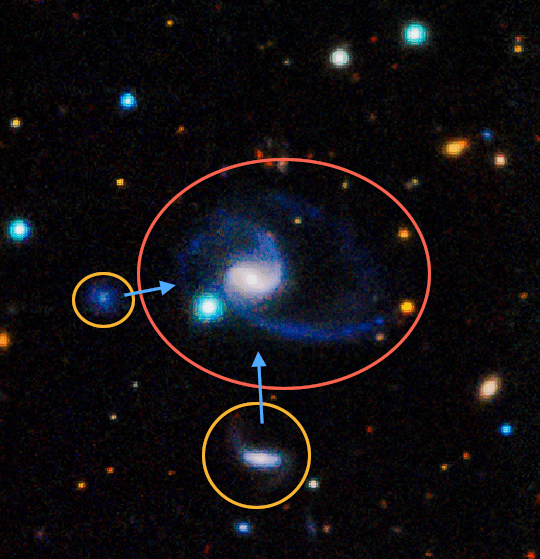
This image shows one of the two ‘exact matches’ to the Milky Way system found in a new survey. The larger galaxy, denoted GAMA202627, which is similar to the Milky Way clearly has two large companions off to the bottom left of the image. InImage Credit: Dr Aaron Robotham, ICRAR/St Andrews using GAMA data.
Here’s something astronomers haven’t seen before: galaxies that look just like our own Milky Way. It’s not that our spiral-armed galaxy is rare but instead the whole neighborhood in which we reside seems to be unusual. Until now, a galaxy paired with close companions like the Magellanic Clouds has not been found elsewhere. But using data from a new radio astronomy survey, astronomers found two Milky Way look-alikes and several others that were similar.
“We’ve never found another galaxy system like the Milky Way before, which is not surprising considering how hard they are to spot!” said Dr. Aaron Robotham with the International Centre for Radio Astronomy Research (ICRAR). “It’s only recently become possible to do the type of analysis that lets us find similar groups.”
“Everything had to come together at once,” Robotham added. “We needed telescopes good enough to detect not just galaxies but their faint companions, we needed to look at large sections of the sky, and most of all we needed to make sure no galaxies were missed in the survey.”
Robotham presented his new findings at the International Astronomical Union General Assembly in Beijing this week.
Using what astronomer consider the most detailed map of the local Universe yet — the Galaxy and Mass Assembly survey (GAMA) — Robotham and his colleagues found that although companions like the Magellanic Clouds are rare, when they are found they’re usually near a galaxy very like the Milky Way, meaning we’re in just the right place at the right time to have such a great view in our night sky.
“The galaxy we live in is perfectly typical, but the nearby Magellenic Clouds are a rare, and possibly short-lived, occurrence. We should enjoy them whilst we can, they’ll only be around for a few billion more years,” said Robotham.
Astronomers have used computer simulations of how galaxies form and they don’t produce many examples similar to the Milky Way and its surroundings, so they have predicted them to be quite a rare occurrence. Astronomers they really haven’t been able to tell just how rare they are, until now, using the new survey which looks at hundreds of thousands of galaxies.
“We found about 3% of galaxies similar to the Milky Way have companion galaxies like the Magellanic Clouds, which is very rare indeed,” Robotham said. “In total we found 14 galaxy systems that are similar to ours, with two of those being an almost exact match.”
The Milky Way is locked in a complex cosmic dance with its close companions the Large and Small Magellanic Clouds, which are clearly visible in the southern hemisphere night sky. Many galaxies have smaller galaxies in orbit around them, but few have two that are as large as the Magellanic Clouds.
Robotham and his team will continue searching for more Milky Way twin systems.
The paper “Galaxy and Mass Assembly (GAMA): In search of Milky-Way Magellanic Cloud Analogues” can be read here or (free version) at arXiv
Adam Steltzner and another Curiosity team member celebrate the successful landing. Credit: NASA/Bill Ingalls.
I admit, I’ve lost count of how many times I’ve watched the great “trailer” JPL put out showing the events in the mission control room during the Entry, Descent and Landing of the Curiosity rover, which also simultaneously provides animations of what took place on Mars. Watching it usually evokes either 1.) a fist pump, or 2.) choking up.
But if you’ve seen the video, or if you were watching live the night of the landing, just what were all those acronyms and phrases being thrown around and what did they mean? And what was the ever-pacing Adam Steltzner (EDL team leader) hearing in his headphones that made him stop, turn around and point just before spacecraft communicator Allen Chen said, “Touchdown confirmed!” … wherein bedlam ensued?
JPL has put out some info about what all was going on behind the scenes. It turns out the words “UHF Strong,” were highly anticipated by the team, plus there was a bit of acronym trickery employed by the team just so there wasn’t any doubt among them what was going on.
There had been a debate among Curiosity’s ELD team about what their first words to indicate that the rover had reached the surface should be. They knew their microphones would be “hot” and that NASA TV was beaming the landing event out live to everyone watching.*
But they also knew that landing safely on Mars meant more than simply landing on Mars – which any one of the 34 engineers present at JPL’s Building 264 Room 230, also known as the “EDL War Room,” will tell you at great length is not simple at all. Their rocket-propelled backpack and rover-lowering Sky Crane system were getting their first all-up test 154 million miles (248 million kilometers) away from home, and there was still plenty that could go wrong even after the rover was gently placed on the surface… plenty.
What if the descent stage kept descending right on top of the rover? What if the bridles connecting the two did not separate? What if the algorithm used to throttle up the engines for the flyaway maneuver was not accurate?
It was the remaining “what ifs” that made what those first words from Mars confirming the rover was on the surface so important.
“If we said ‘touchdown,’ then people not intimately familiar with EDL might infer that Curiosity was good to go,” said engineer Steve Sell. “But two more major calls had to be made before I could begin to breathe again.”
At 10:31:45 p.m. PDT, Jody Davis saw the event record, or EVR, she was looking for appear on her computer screen in the EDL War Room. She knew that the “Touchdown” EVR would only be beamed down if the rover’s descent stage had throttled down — a result which could only occur if the descent stage had offloaded half its weight. The only way the rover could offload half its weight in an instant is if it were being held up from below.
Davis, a member of the EDL team and an engineer from NASA Langley Research Center in Virginia, gave the much reviewed, pre-scripted call — “Tango Delta nominal.”
Tango and Delta are phonetic identifiers for T and D, which the team used to represent touchdown.
One down, two to go, thought Sell. The next call the EDL team was looking for was “RIMU Stable.”
“RIMU stands for Rover Inertial Measurement Unit,” said Sell. “The RIMU gives us the rover’s orientation as well as any movement it is making. If we landed on a crumbling crater wall or an unstable sand dune, or were being dragged by a still-connected descent stage across the surface, then the RIMU would show that in its data set.”
The War Room’s David Way, an engineer from JPL, was monitoring that unit’s performance. Eight long seconds after Jody’s call, he found the EVR he was looking for.
“RIMU Stable,” said Way.
One more crucial milestone to go.
This image shows Curiosity’s Entry, Descent and Landing (EDL) “war room” and its staff. On the night of Aug. 5, 2012 PDT (early morning Aug. 6 EDT), 34 engineers gathered in this room at NASA’s Jet Propulsion Laboratory, Pasadena, Calif., to support the landing. Image credit: NASA/JPL-Caltech
Not receiving that one final call would be something of a long shot to be sure. After all, the rover was down on the ground, and RIMU indicated it wasn’t moving. Their system had been proven every step of the way so far. But everyone in the EDL War Room got as far as they did not only because they were excellent engineers, but because of their predilection for concocting unappetizing entry, descent and landing scenarios – and then figuring out how to elude them. And one ton of fuel-laden, rocket-firing descent stage climbing straight up, only to fall right back down on their factory-fresh landing site and an otherwise good-to-go, roving Mars laboratory was about as unappetizing a scenario as Sell could imagine.
That final confirmation would not come from Sell’s location. The final confirmation that Curiosity had landed clean would come 200 yards and one building away from the EDL War Room. There, in the Mission Support Area of JPL’s Building 230, Adam Steltzner, the mission’s EDL phase lead, was staring across the room at Brian Schwartz, who was not making eye contact with anyone. Schwartz, the EDL communications engineer, was staring at his screen. His task was not to check for a good-news EVR from the rover. Instead, he was waiting to see if the UHF signal became intermittent, faded away or just cut out altogether – all potential indications that the rover and descent stage had not gone their separate ways.
Eight seconds after the RIMU call – Schwartz looked up.
“UHF strong,” said Schwartz.
With that, Steltzner had all the data he needed. Seated directly in front of the pacing EDL Phase Lead, Allen Chen felt a jab in the shoulder. Chen, the mission’s (capsule communicator), knew it could only mean one thing.
“Touchdown confirmed,” said Chen.
Bedlam and joy.
Mars Science Laboratory (MSL) Entry, Descent and Landing Engineer Adam Steltzner reacts after the Curiosity rover successfully landed on Mars on Sunday, Aug. 5, 2012. Photo Credit: (NASA/Bill Ingalls)
Via Twitter, Steltner told Universe Today that when you see him in the video holding up four fingers, he was actually “counting the seconds waiting for UHF confirmation from Brian Schwartz. I think my fingers were me counting down,” he said.
How did the JPL team know what was happening on Mars? — (there was a 13.8 minute radio delay because of the distance between Earth and Mars).
MSL sent out different tones for each event that happened, and 128 distinct tones indicated when steps in the process were activated; one sound indicated the parachute deployed, while another signaled that the vehicle was in powered flight, and still another that the Sky Crane had been activated. These sounds were a series of basic, special individual radio tones.
They were simple tones, transmitted in X-band, comparable to semaphore codes, rather than full telemetry. The Deep Space Network listened for these direct-to-Earth transmissions. However, Earth went out of view of the spacecraft, “setting” below the Martian horizon, partway through the descent, so the X-band tones were not available for confirming the final steps in descent and landing. By then, the bent-pipe relay of telemetry via the Odyssey spacecraft had begun.
Also listening was the Mars Express spacecraft. It recorded about 20 minutes of the rover’s transmissions and tones. ESA engineers have now put together an audio reproduction, compressing the 20 minutes into about 19 seconds of audio that humans can hear that are a “faithful reproduction of the ‘sound’ of the NASA mission’s arrival at Mars and its seven-minute plunge to the Red Planet’s surface,” the European Space Agency team wrote. You can listen to the audio here.
And if you need to watch the landing trailer one more time, here it is:
*Estimates are that at least 3.2 million people were watching online on JPL’s UStream feed. Universe Today’s Live Hangout on Air Virtual Landing Party had a total of 30,000 viewers, with a peak of 7,000 concurrent viewers. This CNET article says that at the peak, 500,000 people were simultaneously watching the live landing on NASA’s HDTV, JPL, and JPL 2 broadcasts via Ustream. While numbers like this aren’t available for TV, Mashable cites research firm Nielsen’s ratings for the night — CNN had 426,000 viewers, MSNBC had 365,000, and Fox came in the highest with 803,000 — which overall have lower numbers than Ustream.
An overhead view of the tracks of Curiosity’s first drive on Mars, taken by the rover’s Mastcam. Credit: NASA/JPL-Caltech
Any rover only gets one ‘first’ drive, and this historic moment has now occurred for the Curiosity Mars rover. “These are historic photos,” said rover driver Matt Heverly, “since there is only one place where your tracks start.”
“It is a really big moment,” said Curiosity Project Manager Pete Theisinger. “We built a rover. Unless the rover roves, we haven’t really accomplished anything.”
This 360-degree panorama shows evidence of a successful first test drive for NASA’s Curiosity rover. On Aug. 22, 2012, the rover made its first move, going forward about 15 feet (4.5 meters), rotating 120 degrees and then reversing about 8 feet (2.5 meters). Curiosity is about 20 feet (6 meters) from its landing site, now named Bradbury Landing. Credit: NASA/JPL-Caltech
And the place where Curiosity departed from now has a new name: Bradbury Landing, named after science fiction writer Ray Bradbury, who would have been 92 today (August 22, 2012).
“This was not a difficult choice for the science team,” said Michael Meyer, program scientist for Curiosity. “Many of us and millions of other readers were inspired in our lives by stories Ray Bradbury wrote to dream of the possibility of life on Mars.”
Curiosity’s first drive was short, but important. “We have a fully functioning mobility system,” Heverly said, adding that the key things about the drive were full revolution of the drivers in forward movement, turning, and back up, plus full revolution of drive actuators, and good data about how the rover perceives its motion. “We’re excited to have this milestone behind us,” he said, “ and it looks like we’re in a great place to do science.”
At a press conference today, Heverly showed an animation (you can see it here) derived from visualization software used for planning the first drive and said the drive took 16 minutes. But only about 4-5 minutes of that was actual driving, as most of the time was spent imaging.
Here’s a video of the team receiving the images:
Heverly said the drive took the rover forward 90 cm, then continued on for a total of 4.5 meters, then at that point took a 120 degree turn around, then backed up 2.5 meters.
The drive occurred at 14:17 UTC (10:17 EDT) today.
The first laser spectrum from the Chemistry and Camera (ChemCam) instrument on NASA’s Curiosity rover. Credit: NASA/JPL-Caltech/LANL/CNES/IRAP
Roger Wiens from the ChemCam team released the first spectrum from “Coronation,” the first rock zapped by Curiosity’s laser and analyzed by the ChemCam instrument. The plot shows emission lines from different elements present in the target, and Wiens said hydrogen showed up initially, but not in later views, meaning that there must have been hydrogen on the surface of the rock.
Weins said they’ve done some more laser shots, and received data from Goldbrun Scour, a place where the skycrane’s thruster dug in and uncovered a small rock outcrop, which appears to be bedrock, since it is layered. But all the rocks so far look to be basalts, which is not surprising, since basalts make up the majority of Mars’ surface.
Curiosity will now be taking what the team called an “intermission” of a few days to a week, where the scientists take a few days to check out the instruments and study the surroundings in more detail before doing any more driving.
“Curiosity is a much more complex vehicle than earlier Mars rovers. The testing and characterization activities during the initial weeks of the mission lay important groundwork for operating our precious national resource with appropriate care,” said Theisinger. “Sixteen days in, we are making excellent progress.”
But Theisinger also cautioned about being too triumphant about what the rover has accomplished in its short time on Mars.
“We are 16 days into a two-year mission.” he said. “We haven’t exercised our sample gathering ability, which is key. As good as it has gone, we’ve only checked off about 2 boxes of the level one requirements – launch on time and land on Mars. But the fact that we haven’t had any early problems is fantastic. But we do need to manage expectations, be prudent and not get ahead of ourselves.”
The next driving destination is an area called Glenelg, approximately 1,300 feet (400 meters) to the east-southeast, where the team can already see three different types of enticing terrain intersecting in one spot.
“When we finally get to Glenelg, we want to study the outcrop there and take a look at the context between the three different terrain types and maybe there is where we would decide to do our first drilling into rock,” said Joy Crisp, the deputy project scientist. “And after Glenelg, we head for Mount Sharp. That will be a much longer drive with probably a few brief stops along the way. That’s going to take several months before we get to that point.”
Last night — if you were in a good location — the Moon, Spica, Mars, Saturn all came together in a lunar/planetary/stellar conjunction. My attempts to see it and capture it failed because of trees (the conjunction took place low on the horizon), but thank goodness for our astrophotographer friends! John Chumack caught the event from his observatory in Ohio (his specs: Canon Rebel Xsi 85mm Lens at F5.6, ISO 400, 1 second exposure) and Ian Musgrave captured the view in Australia, below.
The line-up of the Moon, Mars (top middle), Saturn (right) and the star Spica (left) imaged on 22 August 2012 at 6:45 pm ACST from Adelaide, Australia. Image taken with a Canon IXUS at ASA 400, 15 second exposure. Credit: Ian Musgrave
Want to get your astrophoto featured on Universe Today? Join our Flickr group, post in our Forum or send us your images by email (this means you’re giving us permission to post them). Please explain what’s in the picture, when you took it, the equipment you used, etc.
The rover (and her driving team) has done it! Curiosity has taken a little jaunt inside Gale Crater and here is an image of the wheel tracks to prove it! This image was taken by the right Navigation Camera on the rover Curiosity on Sol 16 (2012-08-22 15:00:53 UTC).
It keeps getting better! This is a full-resolution version of the NASA Curiosity rover descent to Mars, taken by the MARDI descent imager. This video, put together by Daniel Luke Fitch, uses all but a dozen of the full resolution 1600×1200 frames (some haven’t been uploaded from the rover yet). The result is a mind-blowing, HD view of Curiosity’s view as it landed — and it also shows the best views yet of the heat shield impact. Wow!
Click to animate: this gif image shows the movement of the rear right wheel of NASA’s Curiosity as rover drivers turned the wheels in place at the landing site on Mars. Image credit:NASA/JPL-Caltech
She turned her right rear wheel in and turned her right rear wheel out in a sort of Hokey-Pokey-like action in preparation for actually moving inside Gale Crater. Yesterday, the Curiosity rover’s first movements was this “wiggle” of each of the four corner wheels for the first time. Curiosity Mission Manager Michael Watkins said this was a test of the steering actuators on the wheels, and was critical preparation for Curiosity’s first drive on Mars.
Late last night, the rover team sent commands for doing the first drive, and we’ll likely have information on whether that first drive was successful, as JPL has a news conference planned for 17:00 UTC, 1 pm EDT on Wednesday.
Below is a video animation of the rover’s first arm movements, as well:
Other news from the press conference yesterday is that all the instruments are working well on the rover so far, except for one of the instruments on the weather station.
One of the two sets of Rover Environmental Monitoring Station (REMS) wind sensors is not providing data. “One possibility is that pebbles lofted during the landing hit the delicate circuit boards on one of the two REMS booms,” said Curiosity Deputy Project Scientist Ashwin Vasavada of NASA’s Jet Propulsion Laboratory, Pasadena, Calif. “We will have to be more clever about using the remaining wind sensor to get wind speed and direction.”
The rover’s weather station, build by researchers in Spain, checks air temperature, ground temperature, air pressure, wind and other variables every hour at the landing site in Gale Crater. On a typical Martian day, or “sol,” based on measurements so far in the two-week old mission, air temperatures swing from minus 2 to minus 75 Celsius (28 degrees to minus 103 degrees Fahrenheit). Ground temperatures change even more between afternoon and pre-dawn morning, from 3 to minus 91 Celsius (37 degrees to minus 132 degrees Fahrenheit ).
“We will learn about changes from day to day and season to season,” said Javier Gómez-Elvira of the Centro de Astrobiología, Madrid, Spain, principal investigator for REMS.
The team predicts that within a week or so, daily Mars weather reports from Curiosity will become available at this website: http://cab.inta-csic.es/rems/marsweather.html or bit.ly/RzQe6p.
Another instrument provided by Russia is checking for water bound into minerals in the top one meter (three feet) of soil beneath the rover. It employs a technology that is used in oil prospecting on Earth, but had never before been sent to another planet.
“Curiosity has begun shooting neutrons into the ground,” said Igor Mitrofanov of Space Research Institute, Moscow, principal investigator for this instrument, called the Dynamic Albedo of Neutrons, or DAN. “We measure the amount of hydrogen in the soil by observing how the neutrons are scattered, and hydrogen on Mars is an indicator of water.”
The most likely hydrogen to be found in shallow ground of Gale Crater, near the Martian equator, is in hydrated minerals. These are minerals with water molecules, or related ions, bound into the crystalline structure of rocks. They can tenaciously retain water from a wetter past after all free water has gone.
With plans for Curiosity to begin roving, there will soon be new places for all the instruments to measure. The rover team explained the first real drive today will be a very simple execution: forward about 3 meters, then a turn in place of 90 degrees to the right, then a 2-meter drive backwards. Estimates are the rover will end up about 3 meters from its current position and be facing south instead of east.
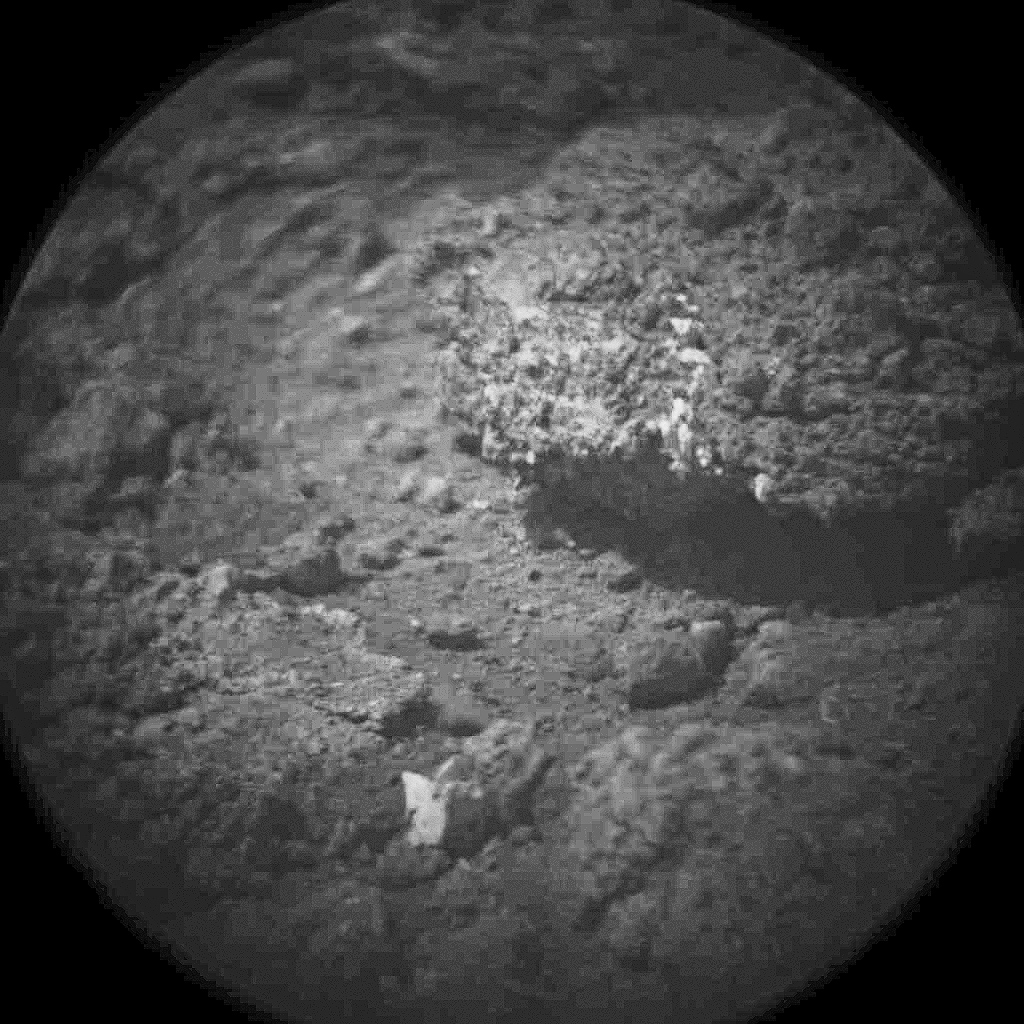
This (adjusted) image was taken by ChemCam’s Remote Micro-Imager on Sol 15 (NASA/JPL-Caltech/LANL)
While Curiosity has been getting a good look around its landing spot on Mars, taking in the sights and sending back some impressive views of distant hills and Gale Crater’s enormous central peak, it’s also been peering very closely at some tiny targets just meters away — with its head-mounted, laser-powered and much-touted ChemCam.
The images above and below were acquired by ChemCam’s Remote Micro-Imager on August 21, the 15th “Sol” of the mission. A full-sized image accessed from the public MSL mission site, it’s been brightened quite a bit to show the details of the target rocks.
Mounted to Curiosity’s “head”, just above its Mastcam camera “eyes”, ChemCam combines a powerful laser with a telescope and spectrometer that can analyze the light emitted by zapped materials, thereby determining with unprecedented precision what Mars’ rocks are really made of.
So even though the rover hasn’t actually roved anywhere yet, it’s still performing valuable scientific investigations of Mars — without moving a single wheel. (UPDATE: actually, Curiosity has begun to do some roving — here are some images of its first wheel tracks!)
Because ChemCam uses a laser, Curiosity can examine many targets — up to a dozen — within a small time period without having to drive right up to them. Even the dustiest rocks won’t pose a problem for ChemCam – one or two zaps with its laser will be enough to vaporize any loose surface material.
In addition to searching for the building blocks of life hidden inside rocks, ChemCam will also serve a precautionary role for future explorers by helping identify the potential toxicity of Mars’ soil and dust. When astronauts one day land on Mars, they are going to get dusty. It’s important to know if Mars’ dust contains anything dangerous like lead, arsenic (and who knows what else!)
See the latest images from the MSL mission — including more ChemCam pictures — here.
Images: NASA/JPL-Caltech/LANL. Edited by J. Major.
Screenview from Mars Clock, available from the Apple Store, that displays Mars time.
You’ve listened to all of JPL’s Curiosity telecons, you can recite the nail-biting sequence of events during MSL’s “Seven Minutes of Terror,” and you’ve devoured thousands of pixels of image data beamed back to Earth. But are you ready to live on Mars time? With a couple of well-timed apps from Google Play and Apple’s app store, you can.
MarsClock, available for Android devices at Google play is a free app written by Scott Maxwell, rover driver for Curiosity. The app, which has been downloaded between 1,000 and 5,000 times, lets you see times for all three of NASA’s Mars Rovers, Spirit, Opportunity and Curiosity. The app allows the user to set single alarms or alarms that repeat every sol. A sol is a full Martian day which is about 24 hours, 39 minutes in Earth time.
Perhaps you shun Android devices for your Apple device whether it’s an iPhone, iPad or iPod. Never fear, you too can be everyone’s favorite Martian living on Mars time. Mars Clock, by SunlightAndTime, is a 99-cent app that displays Mars time and a host of other Mars time goodies. Features include local mean solar time for the rover, coordinated Mars time, sunrise and sunset times for the Curiosity landing site (I think this might be the coolest feature), current season, a countdown to landing feature (which is counting up since MSL landed on Mars on August 5th), current Earth time, a distance calculator between the Earth and Mars and radio communications delay estimate.
While it might be hard to add 40 minutes to your day to live as a Martian or as the JPL team that operates the Curiosity rover, these apps sure do make it more fun.