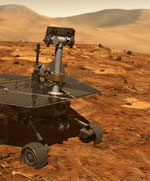
Image credit: NASA/JPL
The mast-mounted cameras on board the Mars Exploration Rovers, Spirit and Opportunity, will provide the best view so far of the surface of the Red Planet. The cameras are the equivalent of 20/20 human vision – with a resolution of one pixel/millimeter at a range of three metres. Their cameras can pan up and down 90-degrees, and look completely around 360-degrees. The first rover, Spirit, will arrive on Mars on January 3, with Opportunity arriving on January 25.
The Cornell University-developed, mast-mounted panoramic camera, called the Pancam, on board the rovers Spirit and Opportunity will provide the clearest, most-detailed Martian landscapes ever seen.
The image resolution – equivalent to 20/20 vision for a person standing on the Martian surface – will be three times higher than that recorded by the cameras on the Mars Pathfinder mission in 1997 or the Viking Landers in the mid-1970s.
From 10 feet away, Pancam has a resolution of 1 millimeter per pixel. “It’s Mars like you’ve never seen it before,” says Steven Squyres, Cornell professor of astronomy and principal investigator for the suite of scientific instruments carried by the rovers.
Spirit is scheduled to land on Mars on Jan. 3 at 11:35 p.m. EST. Opportunity will touch down Jan. 25 at 12:05 a.m. EST.
The Jet Propulsion Laboratory (JPL) in Pasadena, a division of the California Institute of Technology, manages the Mars Exploration Rover project for NASA’s Office of Space Science, Washington, D.C. Cornell, in Ithaca, N.Y., is managing the rovers’ science instruments.
Pancam’s mast can swing the camera 360 degrees across the horizon and 90 degrees up or down. Scientists will know a rover’s orientation each day on the Martian surface by using data gained as the camera searches for and finds the sun in the sky at a known time of day. Scientists will determine a rover’s location on the planet by triangulating the positions of features seen on the distant horizon in different directions.
Rover science team member James Bell, Cornell associate professor of astronomy and the lead scientist for Pancam, says that high resolution is important for conducting science on Mars. “We want to see fine details. Maybe there is layering in the rocks, or the rocks are formed from sediments instead of volcanoes. We need to see the rock grains, whether they are wind-formed or shaped by water,” he says.
Also, Pancam is important for determining a rover’s travel plans. Says Bell: “We need to see details of possible obstacles that may be way off in the distance.”
As each twin-lens CCD (charge-coupled device) camera takes pictures, the electronic images will be sent to the rover’s onboard computer for a number of image processing steps, including compression, before the data are sent to Earth.
Each image, reduced to nothing more than a stream of zeros and ones, will be part of a once- or twice-daily stream of information beamed to Earth, a journey that takes 10 minutes. The data will be retrieved by NASA’s Deep Space Network, delivered to mission controllers at JPL and converted into raw images. From there, the images will be sent to the new Mars image processing facility at Cornell’s Space Sciences Building, where researchers and students will hover over computers to produce scientifically useful pictures.
During the surface activity by the rovers, from January to May 2004, there will be daily extensive planning by the Mars scientific team, led by Squyres. Research specialists Elaina McCartney and Jon Proton will participate in these meetings and decide how to implement the plans for Pancam and each rover’s five other instruments.
Processing pictures from 100 million miles away will be no easy feat. It took three years for Cornell faculty, staff and students to precisely calibrate the Pancam lenses, filters and detectors, and to write the software that tells the special camera what to do.
For instance, researchers Jonathan Joseph and Jascha Sohl-Dickstein wrote and perfected software that will produce images of great clarity. One of Joseph’s software routines patches the images together into larger pictures, called mosaics, and another brings out details within single images. Sohl-Dickstein’s software will allow scientists to generate color pictures and conduct spectral analysis, which is important in understanding the planet’s geology and composition.
Extensive work on the camera also was accomplished by Cornell graduates Miles Johnson, Heather Arneson and Alex Hayes. Hayes, who started working on the Mars mission as a Cornell sophomore, built a mock-up of the panoramic camera that aided the delicate color calibration and calculation of the actual Mars camera’s focal length and field of view. Johnson and Arneson spent eight months at JPL running Pancam under Mars-like conditions and collecting calibration data for the camera’s 16 filters.
For the students and recent graduates on the Pancam team, the research has been both valuable experience and education. “I stood inside a clean room at the Jet Propulsion Laboratory and performed testing on the real rovers,” says Johnson. “It was a weird but an exciting feeling standing next to such a really complex piece of equipment that would soon be on Mars.”
Original Source: Cornell University