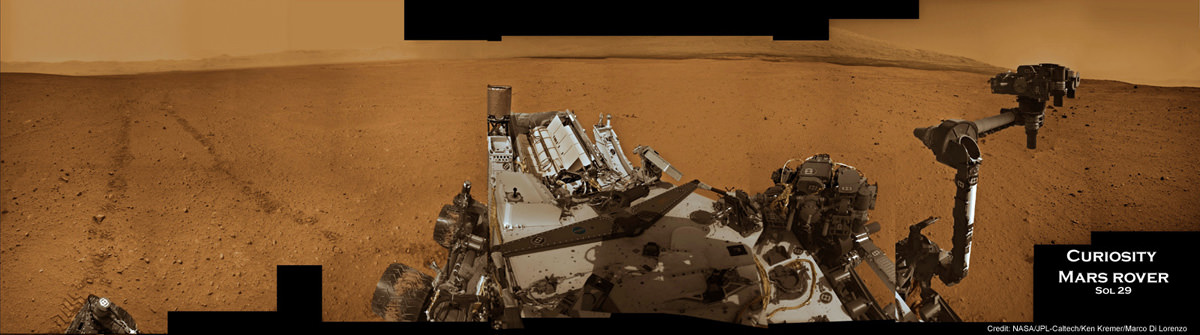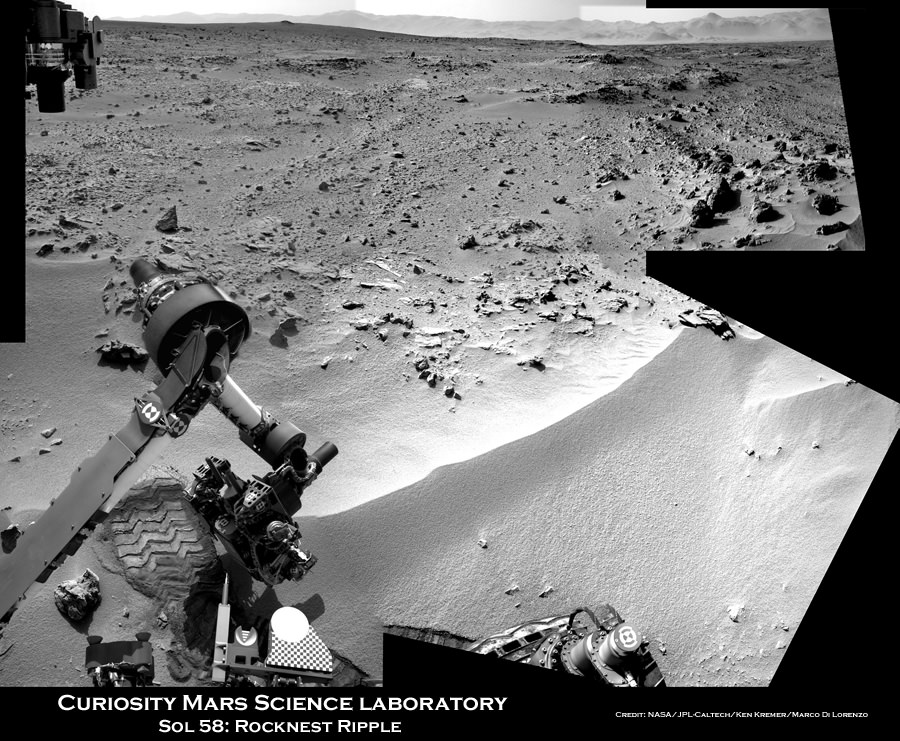
Image caption: Context view of Curiosity working at ‘Rocknest’ Ripple. Curiosity’s maneuvers robotic arm for close- up examination of ‘Rocknest’ ripple site and inspects sandy material at “bootlike” wheel scuff mark with the APXS (Alpha Particle X-Ray Spectrometer) and MAHLI (Mars Hand Lens Imager) instruments positioned on the rotatable turret at the arm’s terminus. Mosaic was stitched together from Sol 57 & 58 Navcam raw images and shows the arm extended to fine grained sand ripple in context with the surrounding terrain and eroded rim of Gale Crater rim on the horizon. Rocknest patch measures about 8 feet by 16 feet (2.5 meters by 5 meters).See NASA JPL test scooping video below. Credit: NASA/JPL-Caltech/Ken Kremer/Marco Di Lorenzo
NASA’s Curiosity rover is set to scoop up her 1st sample of Martian soil this weekend at a soil patch nicknamed ‘Rocknest’ -see our context mosaic above – and will funtion as a sort of circulatory system cleanser for all the critical samples to follow. This marks a major milestone on the path to delivering Mars material to the sample acquisition and processing system for high powered analysis by the robots chemistry labs and looking for the ingredients of life, said the science and engineering team leading the mission at a media briefing on Thursday, Oct 4.
Since landing on the Red Planet two months ago on Aug. 5/6, Curiosity has trekked over 500 yards eastwards across Gale crater towards an intriguing area named “Glenelg” where three different types of geologic terrain intersect.
This week on Oct. 2 (Sol 56), the rover finally found a wind driven patch of dunes at ‘Rocknest’ with exactly the type of fine grained sand that the team was looking for and that’s best suited as the first soil to scoop and injest into the sample acquisition system.
See NASA JPL earthly test scooping video below to visualize how it works:
“We now have reached an important phase that will get the first solid samples into the analytical instruments in about two weeks,” said Mission Manager Michael Watkins of NASA’s Jet Propulsion Laboratory in Pasadena, Calif.
The rover used its wheels to purposely scuff the sand and expose fresh soil – and it sure looked like the first human “bootprint” left on the Moon by Apollo 11 astronauts Neil Armstrong and Buzz Aldrin.
Curiosity will remain at the “Rocknest” location for the next two to three weeks as the team fully tests and cleans the walls of most of the sample collection, handling and analysis hardware – except for the drilling equipment – specifically to remove residual contaminants from Earth.

Image caption: ‘Rocknest’ From Sol 52 Location on Sept. 28, 2012, four sols before the rover arrived at Rocknest. The Rocknest patch is about 8 feet by 16 feet (1.5 meters by 5 meters). Credit: NASA/JPL-Caltech/MSSS
The purpose of this initial scoop is to use the sandy material to thoroughly clean out, rinse and scrub all the plumbing pipes, chambers, labyrinths and interfaces housed inside the complex CHIMRA sampling system and the SAM and CheMin chemistry labs of an accumulation of a very thin and fine oily layer that could cause spurious, interfering readings when the truly important samples of Martian soil and rocks are collected for analysis starting in the near future.
The scientists especially do not want any false signals of organic compounds or other inorganic materials and minerals stemming from Earthly contamination while the rover and its instruments were assembled together and processed for launch.
“Even though we make this hardware super squeaky clean when it’s delivered and assembled at the Jet Propulsion Laboratory, by virtue of its just being on Earth you get a kind of residual oily film that is impossible to avoid,” said Daniel Limonadi of JPL, lead systems engineer for Curiosity’s surface sampling and science system. “And the Sample Analysis at Mars instrument is so sensitive we really have to scrub away this layer of oils that accumulates on Earth.”
The team plans to conduct three scoop and rinse trials – dubbed rinse and discard – of the sample acquisition systems. So it won’t be until the 3rd and 4th soil scooping at Rocknest that a Martian sample would actually be delivered for entry into the SAM and CheMin analytical chemistry instruments located on the rover deck.
“What we’re doing at the site is we take the sand sample, this fine-grained material and we effectively use it to rinse our mouth three times and then kind of spit out,” Limonadi said. “We will take a scoop, we will vibrate that sand on all the different surfaces inside CHIMRA to effectively sand-blast those surfaces, then we dump that material out and we rinse and repeat three times to finish cleaning everything out. Our Earth-based testing has found that to be super effective at cleaning.”
Limondi said the first scooping is likely to be run this Saturday (Oct 6) on Sol 61, if things proceed as planned. Scoop samples will be vibrated at 8 G’s to break them down to a very fine particle size that can be easily passed through a 150 micron sieve before entering the analytical instruments.
The team is being cautious, allowing plenty of margin time and will not proceed forward with undue haste.
“We’re being deliberately slow and incredibly careful,” said Watkins. “We’re taking a lot of extra steps here to make sure we understand exactly what’s going on, that we won’t have to do every time we do a scoop in the future.”
Curiosity’s motorized, clamshell-shaped scoop measures 1.8 inches (4.5 centimeters) wide, 2.8 inches (7 centimeters) long, and can sample to a depth of about 1.4 inches (3.5 centimeters). It is part of the CHIMRA collection and handling device located on the tool turret at the end of the rover’s arm.
“The scoop is about the size of an oversized table spoon,” said Limonadi.

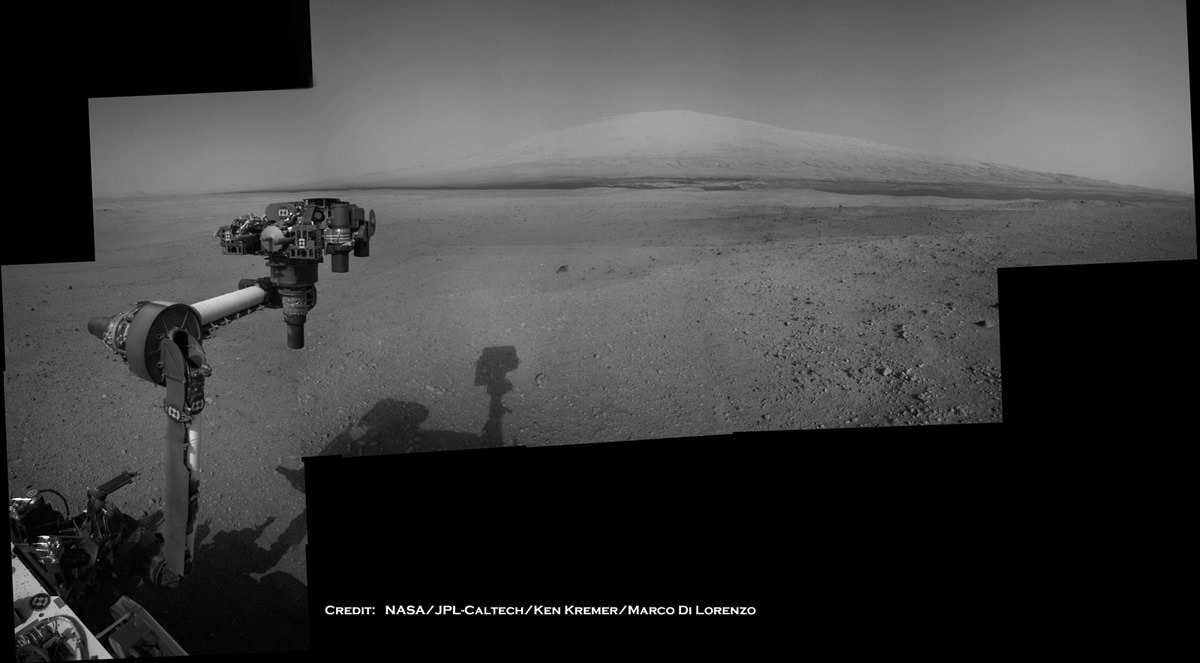
Image caption: Curiosity extends 7 foot long arm to investigate ‘Bathurst Inlet’ rock outcrop with the MAHLI camera and APXS chemical element spectrometer in this mosaic of Navcam images assembled from Sols 53 & 54 (Sept. 29 & 30, 2012). Mount Sharp, the rover’s eventual destination is visible on the horizon. Thereafter the rover drove more than 77 feet (23 meters) eastwards to reach the ‘Rocknest’ sand ripple. Credit: NASA/JPL-Caltech/Ken Kremer/Marco Di Lorenzo
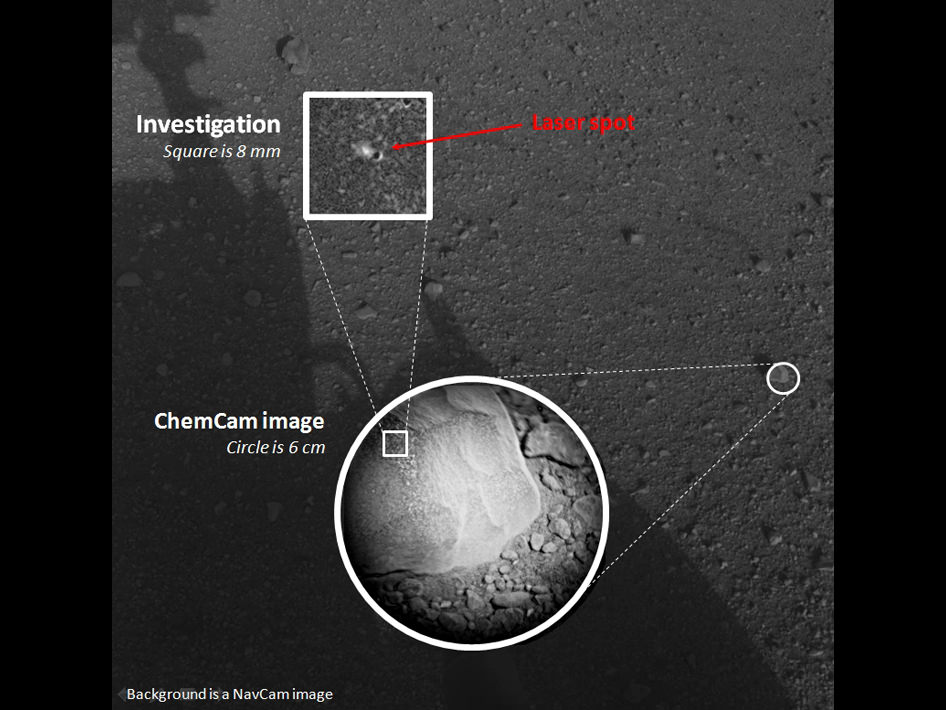
During the lengthy stay at Rocknest, the rover will conduct extensive investigations of the surrounding rocks and terrain with the cameras, ChemCam laser, DAN, RAD as well as weather monitoring with the REMS instrument.
After finishing her work at Rocknest, Curiosity will resume driving eastward to Glenelg, some 100 meters (yards) away where the team will select the first targets and rock outcrops to drill, sample and analyze.
At Glenelg and elsewhere, researchers hope to find more evidence for the ancient Martian stream bed they discovered at rock outcrops at three different locations that Curiosity has already visited.
Curiosity is searching for organic molecules and evidence of potential habitable environments to determine whether Mars could have supported Martian microbial life forms, past or present.

Image caption: Curiosity’s Travels Through Sol 56 – Oct. 2, 2012