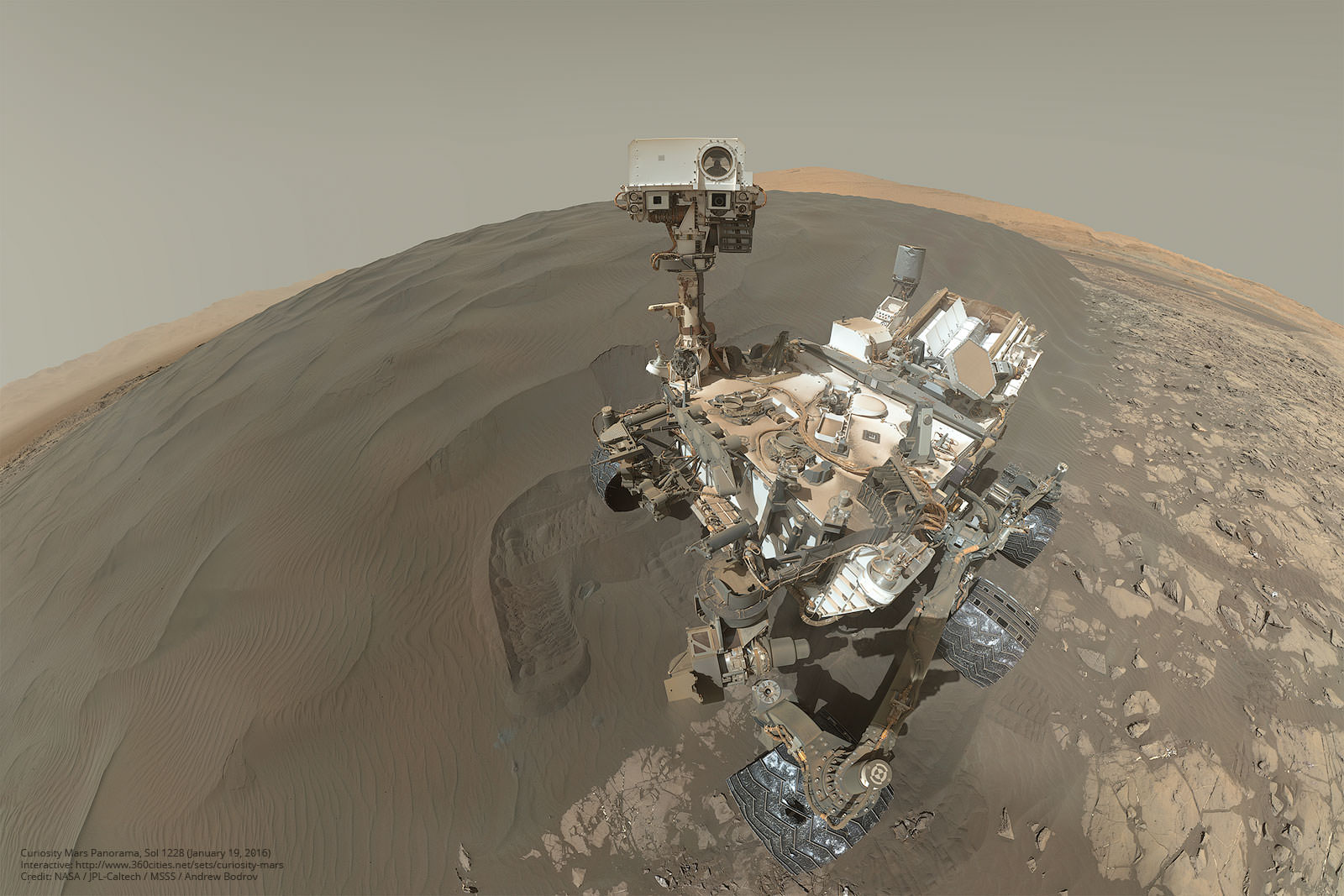
Curiosity rover 'selfie' at the Bagnold Dunes on Mars. The mosaic includes 57 images taken on Sol 1228 (January 19, 2016). Credit: NASA/JPL-Caltech/MSSS/Andrew Bodrov.
While some of us might only be dreaming of sticking our toes in the sand right about now, the Curiosity rover is actually doing so. But it’s no vacation for the rover, as she makes her way through some very unusual and striking sand dunes on Mars. The Bagnold Dune Field lies along the northwestern flank of Mt. Sharp — Curiosity’s main target for its mission — and this is the first time ever we’ve had the opportunity to do close-up studies of active sand dunes anywhere besides Earth.
Thanks to Andrew Bodrov for sharing his compilation of this 57-image mosaic ‘selfie,’ and you can play around with an interactive version below to see some great views of the dunes. The images were taken by the rover’s Mars Hand Lens Imager (MAHLI) on Sol 1228 (January 19, 2016).
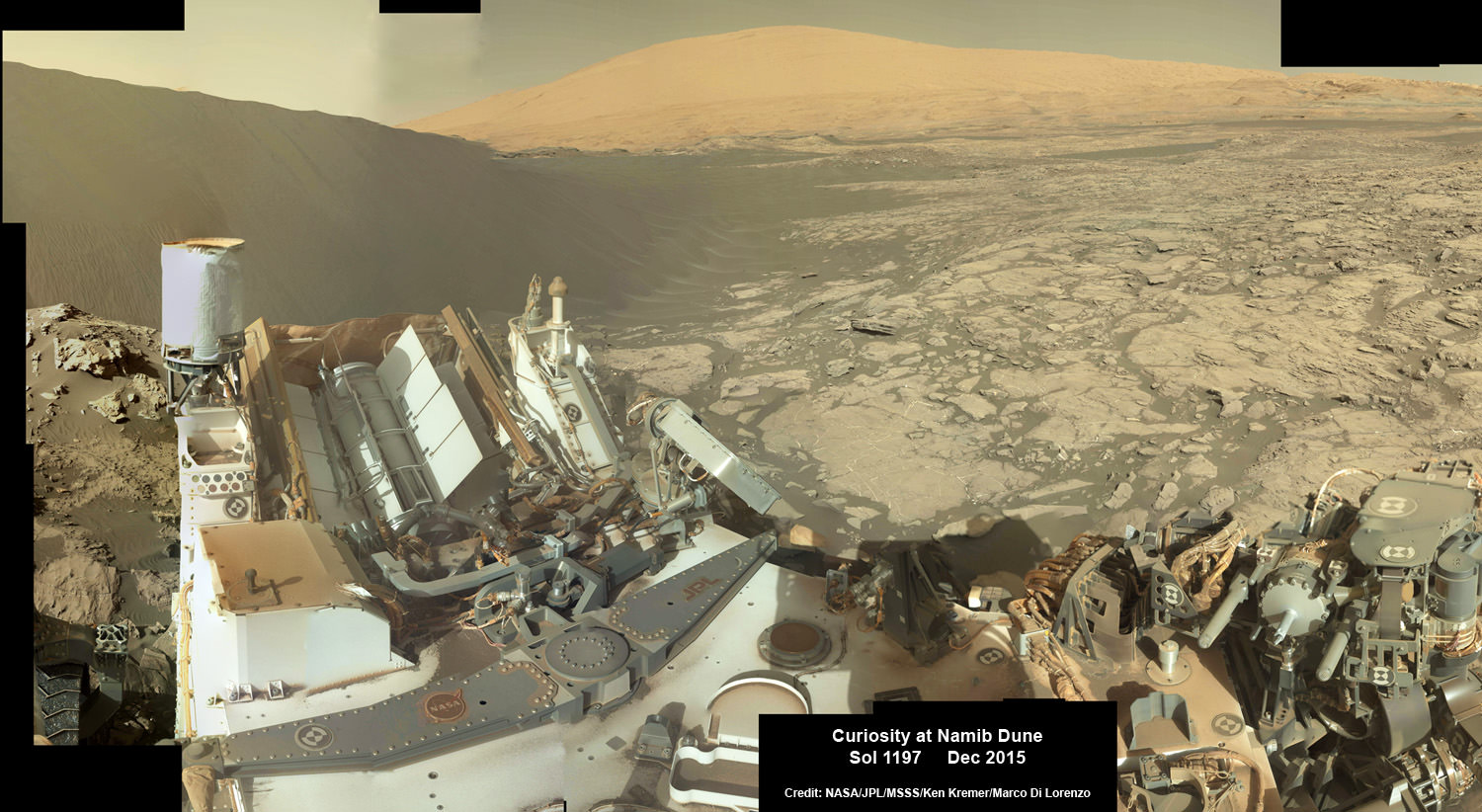
Curiosity explores Red Planet paradise at Namib Dune during Christmas 2015 - backdropped by Mount Sharp. Curiosity took first ever self-portrait with Mastcam color camera after arriving at the lee face of Namib Dune. This photo mosaic shows a portion of the full self portrait and is stitched from Mastcam color camera raw images taken on Sol 1197, Dec. 19, 2015. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Just in time for the holidays, NASA’sCuriosity rover is celebrating Christmas 2015 at a Red Planet Paradise – spectacular “Namib Dune.” And she marked the occasion by snapping her first ever color self-portrait with the mast mounted high resolution Mastcam 34 mm camera.
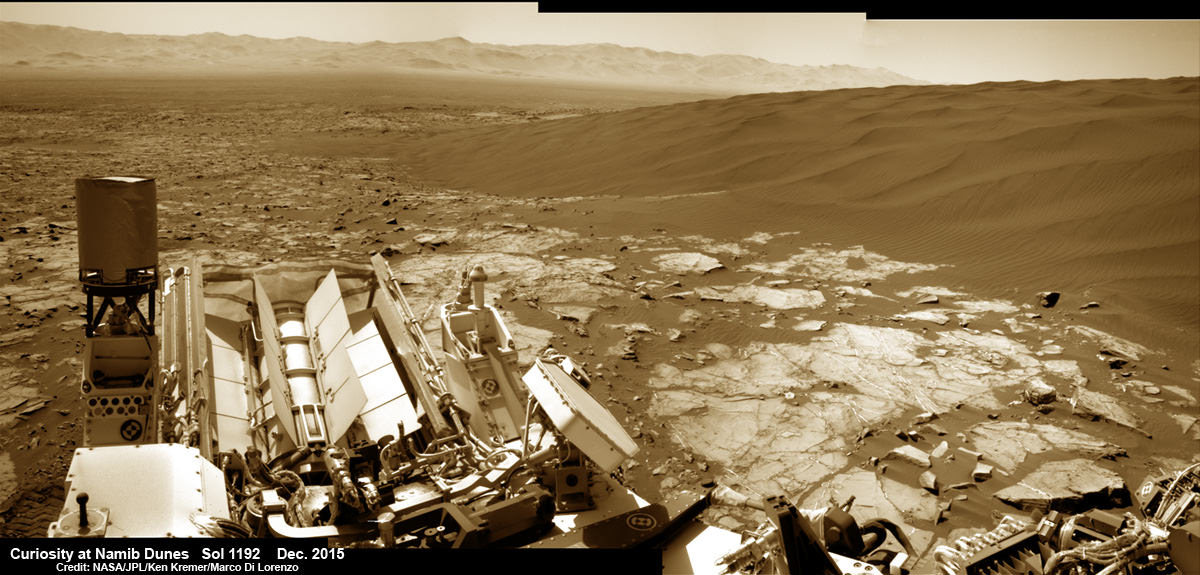
Curiosity explores Namib Dunes at base of Mount Sharp, for first in-place study of an active sand dune anywhere other than Earth. See Gale Crater rim in the distance.This colorized photo mosaic is stitched from navcam camera raw images taken on Sol 1192, Dec. 13, 2015. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Curiosity’s View on Mars Today
Curiosity explores Namib Dunes at base of Mount Sharp, for first in-place study of an active sand dune anywhere other than Earth. See Gale Crater rim in the distance.This colorized photo mosaic is stitched from navcam camera raw images taken on Sol 1192, Dec. 13, 2015. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
After many months of painstaking driving, NASA’s Curiosity Mars rover has reached the edge of a massive field of spectacular rippled sand dunes located at the base of Mount Sharp that range up to two stories tall. And she has now begun humanity’s first up-close investigation of currently active sand dunes anywhere beyond Earth.
Artist's conception of Mars, with asteroids nearby. Credit: NASA
Mars represents something of a conundrum for scientists. In many respects, it is significantly different from Earth. It’s cold, it’s dry, there is little atmosphere or precipitation to speak of, and nothing grows there. By our standards, that makes it an incredibly inhospitable place. And yet, in many other respects, it is quite similar to our world.
For instance, Mars’ internal structure is differentiated between a metallic core and a silicate mantle and crust. It also has plenty of water, though the majority of it is concentrated in the polar regions as water ice (and as a permanent layer of permafrost under much of the surface). But perhaps most striking of all, a day on Mars is almost the same as a day here on Earth.
In fact, a day on Mars is roughly 40 minutes longer than a day is here on Earth. Compared to other bodies in our Solar System where a day is either incredibly short (Jupiter’s rotates once on its axis every 9 hours, 55 minutes and 29.69 seconds) or incredibly long (a day on Venus lasts for 116 days and 18 hours), this similarity is quite astounding.
However, there are some things that need to be addressed before we go about declaring just how long a day is on another planet. In fact, there are two ways to determine the length of a day on a celestial body, the sidereal day and the solar day; both of which are used by astronomers for determining the passage on time.
Sidereal vs. Solar:
By definition, a sidereal day on Mars is the length of time that it takes the planet to rotate once on its axis so that stars appear in the same place in the night sky. On Earth, this takes exactly 23 hours, 56 minutes and 4.1 seconds. In comparison, on Mars, a sidereal day lasts 24 hours, 37 minutes, and 22 seconds.
The solar day, by contrast, is the time it takes for the Earth to rotate on its axis so that the Sun appears in the same position in the sky. This position changes slightly each day, but on Earth, a mean solar day works out to being 24 hours long. On Mars, a solar day lasts 24 hours, 39 minutes, and 35 seconds. Rounding that out, we say that a day here on Earth works out to an even 24 hours while on Mars, a day lasts 24 hours and 40 minutes.
Want to know about some other interesting similarities Mars has with Earth? Read on!
Seasonal Changes:
Mars also has a seasonal cycle that is similar to that of Earth’s. This is due in part to the fact that Mars also has a tilted axis, which is inclined 25.19° to its orbital plane (compared to Earth’s axial tilt of approx. 23.44°). It’s also due to Mars orbital eccentricity, which mean that it ranges in distance from 206.7 million to249.2 million kilometers from the Sun.
This change in distance causes significant variations in temperature. While the planet’s average temperature is -46 °C (51 °F), this ranges from a low of -143 °C (-225.4 °F) during the winter at the poles to a high of 35 °C (95 °F) during summer and midday at the equator. This high in temperatures is what allows for liquid water to still flow, albeit intermittently, on the surface of Mars.
It also snows on Mars. In 2008, NASA’s Phoenix Landerfound water ice in the polar regions of the planet. This was an expected finding, but scientists were not prepared to observe snow falling from clouds. The snow, combined with soil chemistry experiments, led scientists to believe that the landing site had a wetter and warmer climate in the past.
The eccentricity in Mars’ orbit is what causes some significant variations in temperature. Credit: NASA
And then in 2012, data obtained by the Mars Reconnaissance Orbiter revealed that carbon-dioxide snowfalls occur in the southern polar region of Mars. For decades, scientists have known that carbon-dioxide ice is a permanent part of Mars’ seasonal cycle and exists in the southern polar caps. But this was the first time that such a phenomena was detected, and it remains the only known example of carbon-dioxide snow falling anywhere in our solar system.
For starters, soil samples and orbital observation have demonstrated conclusively that roughly 3.7 billion years ago, the planet had more water on its surface than is currently in the Atlantic Ocean. Similarly, atmospheric studies conducted on the surface and from space have proven that Mars also had a viable atmosphere at that time, one which was slowly stripped away by solar wind.
Weather Patterns:
Like Earth, Mars can have some pretty extreme weather. In the Red Planet’s case, this takes the form of dust storms that can dominated the surface from time to time. These storms have been known to grow to be thousands of kilometers across, occasionally encircling the entire planet and covering everything in a thick haze of dust. When these storms become that large, they prevent direct observation of the Martian surface.
Case in point: when the Mariner 9 orbiter became the first spacecraft to orbit Mars in 1971, it sent pictures back to Earth of a world consumed in haze. The entire planet was covered by a dust storm so massive that only Olympus Mons, the giant Martian volcano that measures 24 km high, could be seen above the clouds. This storm lasted for a full month, and delayed Mariner 9‘s attempts to photograph the planet in detail.
And then on June 9th, 2001, the Hubble Space Telescope spotted a dust storm in the Hellas Basin on Mars. By July, the storm had died down, but then grew again to become the largest storm in 25 years. So big was the storm that amateur astronomers using small telescopes were able to see it from Earth. And the cloud raised the temperature of the frigid Martian atmosphere by a stunning 30° Celsius.
Therein lies another thing Mars has in common with Earth – global warming! Much like warming trends here on Earth, warming on Mars is caused by the presence of particulate matter in the air that absorbs energy from the Sun and radiates it outward into the atmosphere. causing average temperatures to rise.
These storms tend to occur when Mars is closest to the Sun, and are the result of temperatures rising and triggering changes in the air and soil. As the soil dries, it becomes more easily picked up by air currents, which are caused by pressure changes due to increased heat. The dust storms cause temperatures to rise even further, so you could say Mars has a “greenhouse effect” of its own!
As you have probably concluded from all the facts listed above, Mars can be a harsh and volatile planet. Just knowing the answer to ”how long is a day on Mars?” only provides a small glimpse of what is going on there. At the end of the day (no pun intended!) there is plenty happening on Mars that makes it similar enough to Earth that many people are actually contemplating living there someday. And knowing exactly what sets Mars apart, and what we can work with, will be intrinsic to making that happen!
A photo of the full moon, taken from Apollo 11 on its way home to Earth, from about 18,520 km (10,000 nm) away. Credit: NASA
People often criticize the amount of money spent on space exploration. Sometimes it’s well-meaning friends and family who say that that money is wasted, and would be better spent on solving problems here on Earth. In fact, that’s a whole cultural meme. You see it played out over and over in the comments section whenever mainstream media covers a space story.
While solving problems here on Earth is noble, and the right thing to do, it’s worth pointing out that the premier space exploration body on Earth, NASA, actually has a tiny budget. When you compare NASA’s budget to what people spend on cigarettes, NASA looks pretty good.
Ignoring for the moment the fact that we don’t know how to solve all the problems here on Earth, let’s look at NASA’s budget over the years, and compare it to something that is truly a waste of money: cigarettes and tobacco.
NASA is over 50 years old. In its first year, its budget was $89 million. (That’s about $732 million in today’s dollars.) In that same year, Americans spent about $6 billion on cigarettes and tobacco.
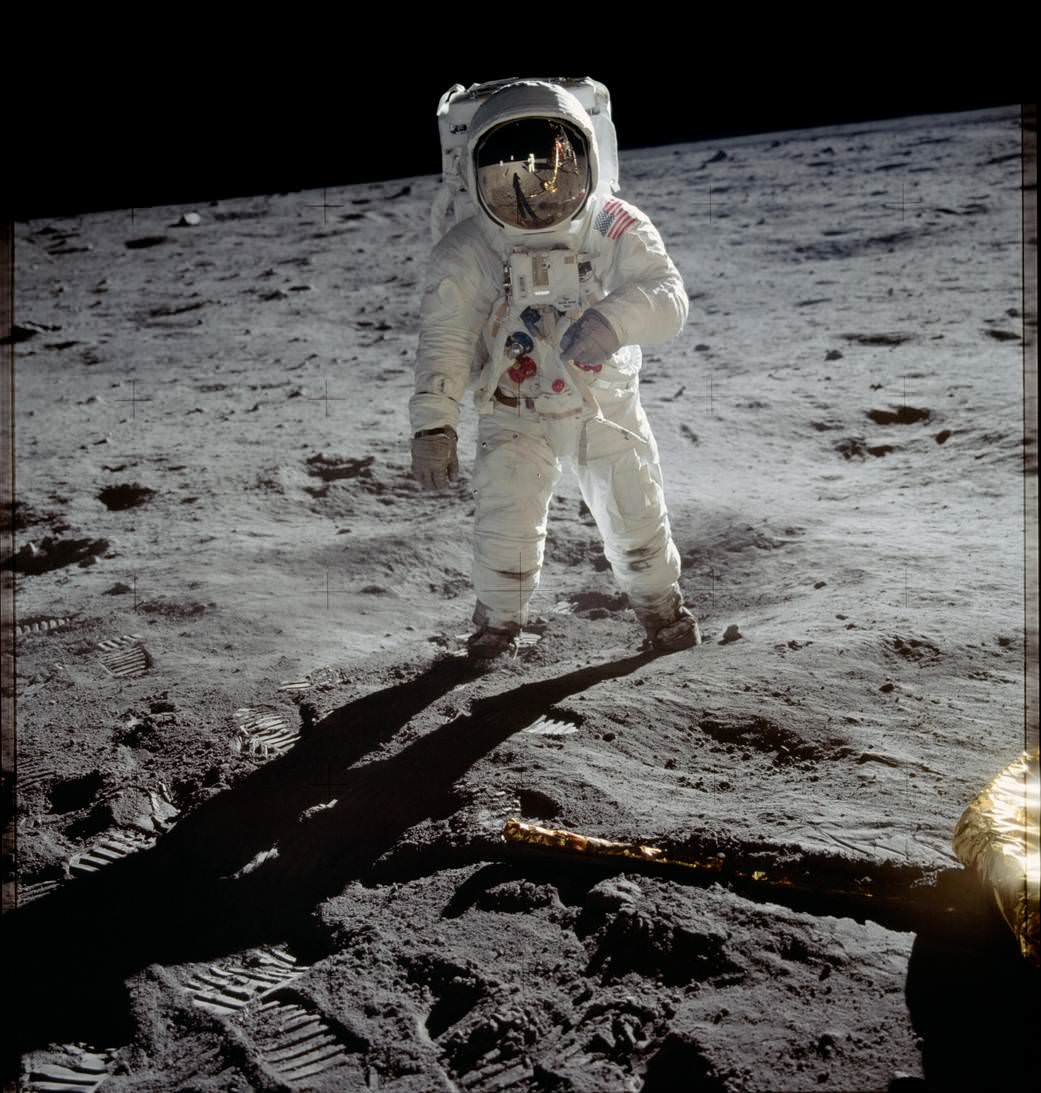
Buzz Aldrin on the Moon. Image Credit: NASA
From 1969 to 1972, NASA’s Apollo Program landed 12 men on the Moon. They won the Space Race and established a moment that will echo through the ages, no matter what else humanity does: the first human footsteps anywhere other than Earth. In those four years, NASA’s combined budget was $14.8 billion. In that same time period, Americans spent over twice as much—$32 billion—on smoking.
STS-1 Columbia on the launch pad. Image Credit: NASA
In 1981, NASA launched its first space shuttle, the Columbia (STS-1). NASA’s budget that year was $5.5 billion. That same year, the American population spent about $17.4 billion on tobacco. That’s three times NASA’s budget. How many more shuttle flights could there have been? How much more science?
The Hubble Space Telescope in 1997, after its first servicing mission. It’s about 552 km (343m) above Earth. Image: NASA
In 1990, NASA launched the Hubble Space Telescope into Low Earth Orbit (LEO.) The Hubble has been called the most successful science project in history, and Universe Today readers probably don’t need to be told why. The Hubble is responsible for a laundry list of discoveries and observations, and has engaged millions of people around the world in space science and discovery. In that year, NASA had a budget of $12.4 billion. And smoking? In 1990, Americans smoked their way through $26.5 billion of tobacco.
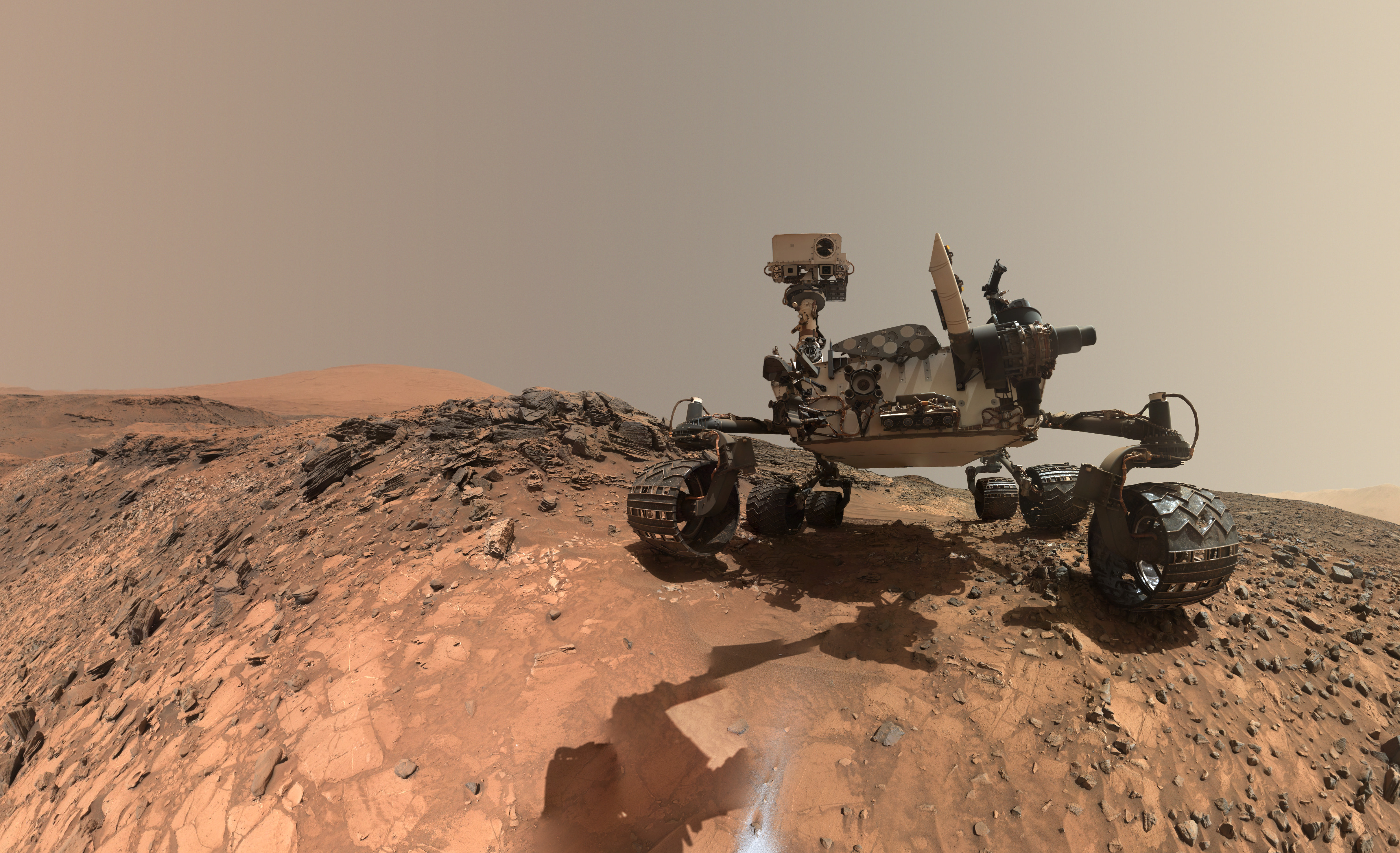
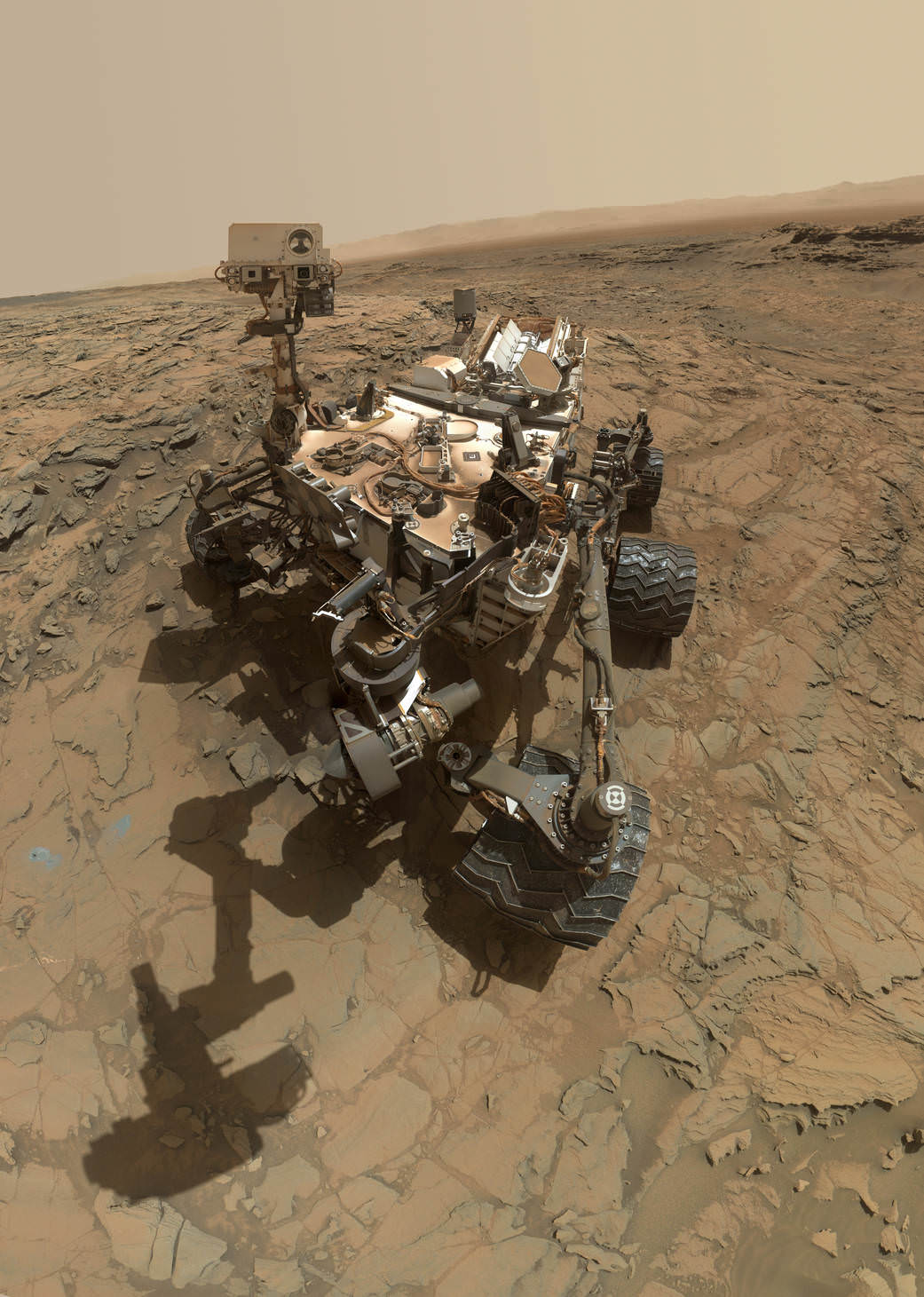
MSL Curiosity selfie on the surface of Mars. Image: NASA/JPL/Cal-Tech.
In 2012, NASA had a budget of $16.8 billion. In that year, NASA successfully landed the Mars Science Laboratory (MSL) Curiosity on Mars, at a cost of $2.5 billion. Also that year, American lungs processed $44 billion worth of tobacco. That’s the equivalent of 17 Curiosity rovers!
There was an enormous scientific debate around where Curiosity should land, in order to maximize the science. Scientific teams competed to have their site chosen, and eventually the Gale Crater was selected as the most promising site. Gale is a meteor crater, and was chosen because it shows signs of running water, as well as evidence of layered geology including clays and minerals.
Sunrise at Gale Crater on Mars. Gale is at center top with the mound in the middle, called Mt. Sharp (Aeolis Mons.)
But other equally tantalizing sites were in contention, including Holden Crater, where a massive and catastrophic flood took place, and where ancient sediments lie exposed on the floor of the crater, ready for study. Or Mawrth Vallis, another site that suffered a massive flood, which exposed layers of clay minerals formed in the presence of water. With the money spent on tobacco in 2012 ($44 billion!) we could have had a top ten list of landing sites on Mars, and put a rover at each one.
Think of all that science.
One of the JWST’s gold-coated mirrors. Not even launched yet, and the golden mirrors are already iconic. Image Credit: NASA/Drew Noel
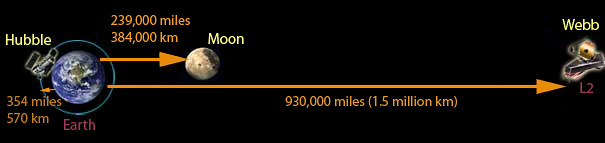
NASA’s budget is always a source of controversy, and that’s certainly true of another of NASA’s big projects: The James Webb Space Telescope (JWST.) Space enthusiasts are eagerly awaiting the launch of the JWST, planned for October 2018. The JWST will take up residence at the second Lagrange Point (L2,) where it will spend 5-10 years studying the formation of galaxies, stars, and planetary systems from the Big Bang until now. It will also investigate the potential for life in other solar systems.
The L2 (Lagrange 2) point in space. Image Credit: NASA
Initially the JWST’s cost was set at $1.6 billion and it was supposed to launch in 2011. But now it’s set for October 2018, and its cost has grown to $8.8 billion. It sounds outrageous, almost $9 billion for a space telescope, and Congress considered scrapping the entire project. But what’s even more outrageous is that Americans are projected to spend over $50 billion on tobacco in 2018.
When people in the future look back at NASA and what it was able to accomplish in the latter half of the 20th century and the beginning of the 21st century, they’ll think two things: First, they’ll think how amazing it was that NASA did what it did. The Moon landings, the Shuttle program, the Hubble, Curiosity, and the James Webb.
Then, they’ll be saddened by how much more could’ve been done collectively, if so much money hadn’t been wasted on something as deadly as smoking.
NASA’s Opportunity rover peers outwards across to the vast expense of Endeavour Crater from current location descending along steep walled Marathon Valley in early November 2015. Marathon Valley holds significant deposits of water altered clay minerals holding clues to the planets watery past. Shadow of Pancam Mast assembly and robots deck visible at right. This navcam camera photo mosaic was assembled from images taken on Sol 4181 (Oct. 29, 2015) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
NASA’s Opportunity rover peers outwards across to the vast expense of Endeavour Crater from current location descending along steep walled Marathon Valley in early November 2015. Marathon Valley holds significant deposits of water altered clay minerals holding clues to the planets watery past. Shadow of Pancam Mast assembly and robots deck visible at right. This navcam camera photo mosaic was assembled from images taken on Sol 4181 (Oct. 29, 2015) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Just shy of an unfathomable 4200 Sols traversing ravishing alien terrain on the Red Planet, the longest living ‘Martian’ – NASA’s robot ‘Opportunity’ – is driving between “lily pads” down steep walled Marathon Valley in search of life giving sun that enables spectacular science yielding clues to Marswatery past. All this as she strives to survive utterly harsh climate extremes, because ‘winter is coming’ for her seventh time on the fourth rock from the sun!
“Opportunity is driving east and southeast down Marathon Valley, bisecting the region in which we detect smectites [clay minerals] using CRISM [spectrometer] data,” Opportunity Deputy Principal Investigator Ray Arvidson, of Washington University in St. Louis, told Universe Today.
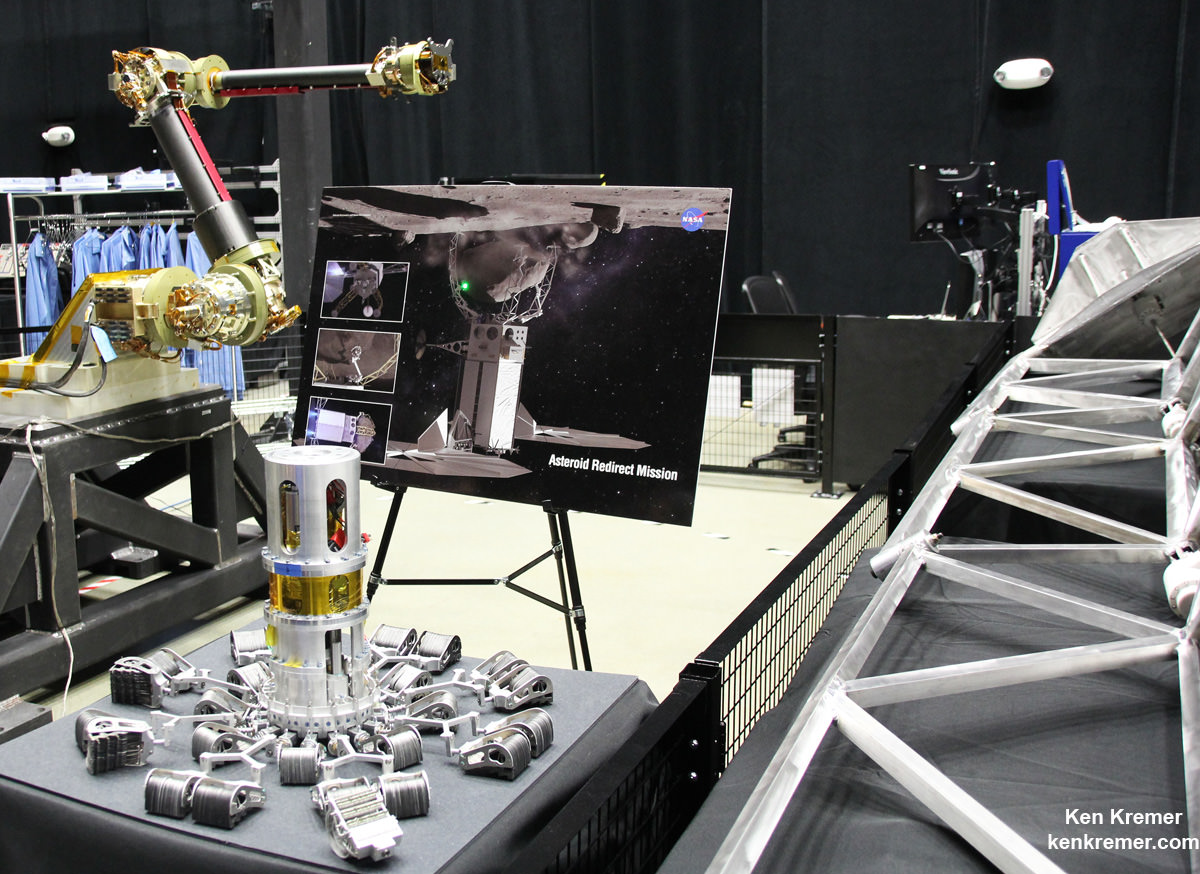
Robotic sampling arm and capture mechanism to collect a multi-ton boulder from an asteroid are under development at NASA Goddard and other agency centers for NASA’s unmanned Asteroid Redirect Vehicle and eventual docking in lunar orbit with Orion crew vehicle by the mid 2020s. Credit: Ken Kremer/kenkremer.com
NASA GODDARD SPACE FLIGHT CENTER, MD – Rigorous testing has begun on the advanced robotic arm and boulder extraction mechanisms that are key components of the unmanned probe at the heart of NASA’s Asteroid Redirect Robotic Mission (ARRM) now under development to pluck a multi-ton boulder off a near-Earth asteroid so that astronauts visiting later in an Orion crew capsule can harvest a large quantity of samples for high powered scientific analysis back on Earth. Universe Today inspected the robotic arm hardware utilizing “leveraged robotic technology” during an up close visit and exclusive interview with the engineering development team at NASA Goddard.
“The teams are making great progress on the capture mechanism that has been delivered to the robotics team at Goddard from Langley,” NASA Associate Administrator Robert Lightfoot told Universe Today.
“NASA is developing these common technologies for a suite of missions like satellite servicing and refueling in low Earth orbit as well as autonomously capturing an asteroid about 100 million miles away,” said Ben Reed, NASA Satellite Servicing Capabilities Office (SSCO) Deputy Project Manager, during an exclusive interview and hardware tour with Universe Today at NASA Goddard in Greenbelt, Maryland, regarding concepts and goals for the overall Asteroid Redirect Mission (ARM) initiative.
NASA is leveraging technology originally developed for satellite servicing such as with the Robotic Refueling Mission (RRM) currently on board the International Space Station(ISS) and repurposing them for the asteroid retrieval mission.
“Those are our two near term mission objectives that we are developing these technologies for,” Reed explained.
The unmanned Asteroid Redirect Robotic Mission (ARRM) to grab a boulder is the essential first step towards carrying out the follow on sample retrieval with the manned Orion Asteroid Redirect Mission (ARM) by the mid-2020s.
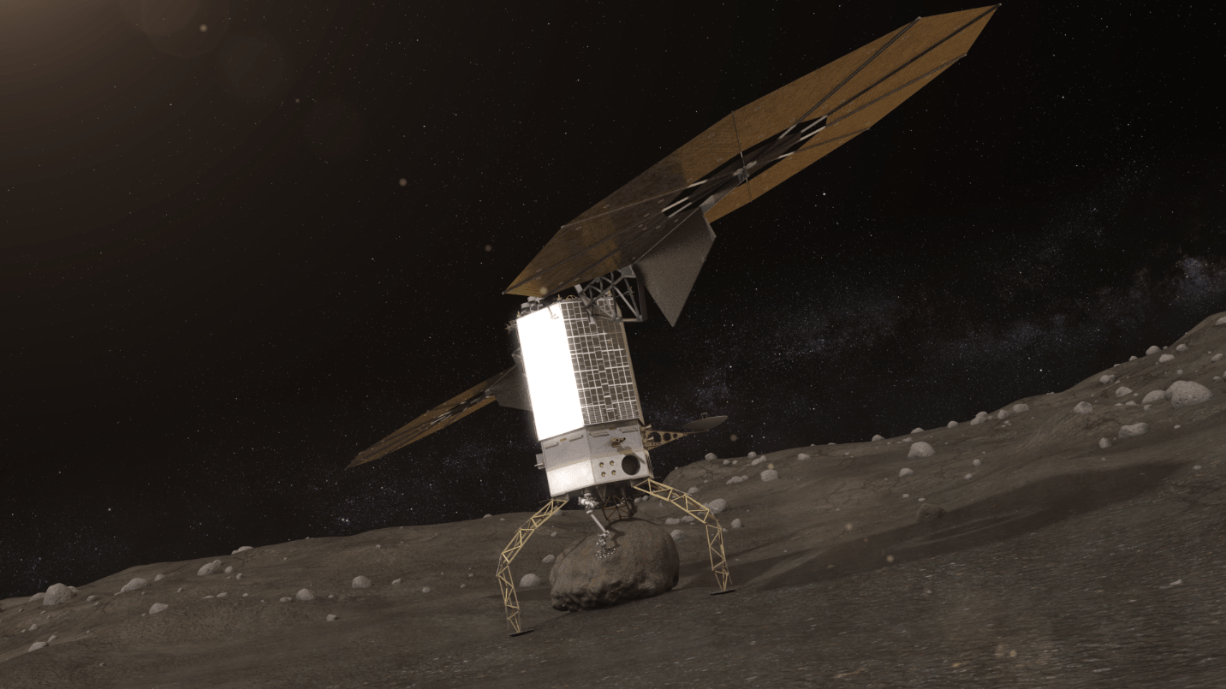
ARRM will use a pair of highly capable robotic arms to autonomously grapple a multi-ton (> 20 ton) boulder off the surface of a large near-Earth asteroid and transport it to a stable, astronaut accessible orbit around the Moon in cislunar space.
“Things are moving well. The teams have made really tremendous progress on the robotic arm and capture mechanism,” Bill Gerstenmaier, NASA Associate Administrator for Human Exploration and Operations, told Universe Today.
Then an Orion crew capsule can fly to it and the astronauts will collect a large quantity of rock samples and gather additional scientific measurements.
“We are working on a system to rendezvous, capture and service different [target] clients using the same technologies. That is what we are working on in a nut shell,” Reed said.
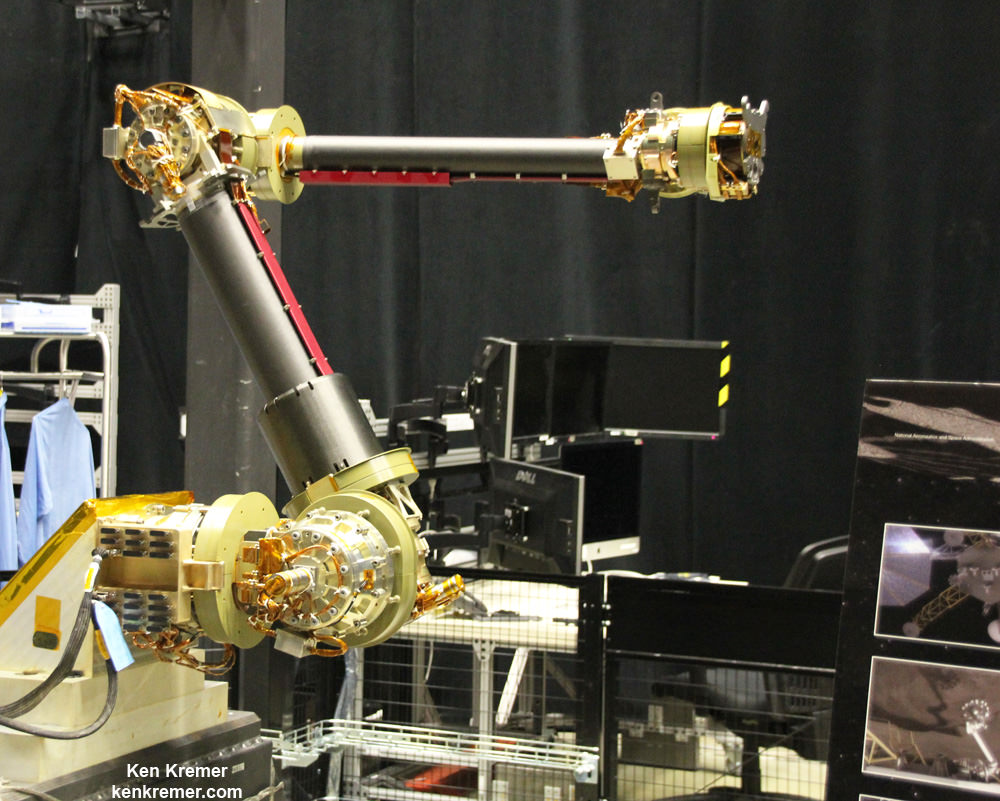
This engineering design unit of the robotic servicing arm is under development to autonomously extract a boulder off an asteroid for NASA’s asteroid retrieval mission and is being tested at NASA Goddard. It has seven degrees of freedom and mimics a human arm. Credit: Ken Kremer/kenkremer.com
“Right now the plan is to launch ARRM by about December 2020,” Reed told me. But a huge amount of preparatory work across the US is required to turn NASA’s plan into reality.
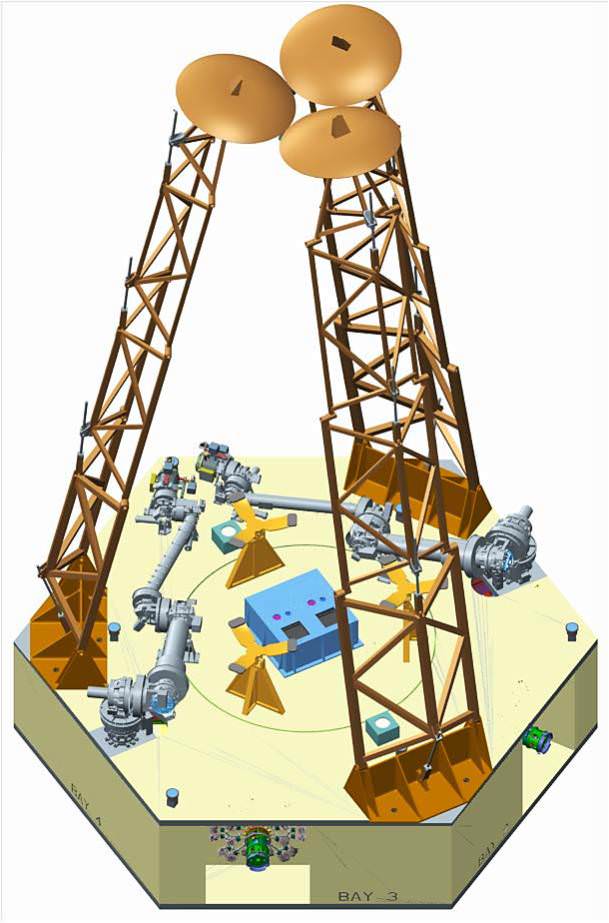
Key mission enabling technologies are being tested right now with a new full scale engineering model of the ‘Robotic Servicing Arm’ and a full scale mockup of the boulder snatching ARRM Capture Module at NASA Goddard, in a new facility known as “The Cauldron.”
Capture Module comprising two robotic servicing arms and three boulder grappling contact and restraint system legs for NASA’s Asteroid Redirect Robotic Mission (ARRM). Credit: NASAThe ARRM capture module is comprised of two shorter robotic arms (separated by 180 degrees) and three lengthy contact and restraint system capture legs (separated by 120 degrees) attached to a cradle with associated avionics, computers and electronics and the rest of the spacecraft and solar electric power arrays.
“The robotic arm we have here now is an engineering development unit. The 2.2 meter-long arms can be used for assembling large telescopes, repairing a failed satellite, removing orbital debris and capturing an asteroid,” said Reed.
“There are two little arms and three big capture legs.”
“So, we are leveraging one technology development program into multiple NASA objectives.”
“We are working on common technologies that can service a legacy orbiting satellite, not designed to be serviced, and use those same technologies with some tweaking that we can go out with 100 million miles and capture an asteroid and bring it back to the vicinity of the Moon.”
“Currently the [capture module] system can handle a boulder that’s up to about 3 x 4 x 5 meters in diameter.”
Artists concept of NASA’s Asteroid Redirect Robotic Mission capturing an asteroid boulder before redirecting it to a astronaut-accessible orbit around Earth’s moon. Credits: NASA
The Cauldron is a brand new Goddard facility for testing technologies and operations for multiple exploration and science missions, including satellite servicing and ARRM that just opened in June 2015 for the centers Satellite Servicing Capabilities Office.
Overall project lead for ARRM is the Jet Propulsion Laboratory (JPL) with numerous contributions from other NASA centers and industrial partners.
“This is an immersive development lab where we bring systems together and can do lifetime testing to simulate what’s in space. This is our robotic equivalent to the astronauts NBL, or neutral buoyancy lab,” Reed elaborated.
“So with this same robotic arm that can cut wires and thermal blankets and refuel an Earth sensing satellite, we can now have that same arm go out on a different mission and be able to travel out and pick up a multi-ton boulder and bring it back for astronauts to harvest samples from.”
“So that’s quite a technical feat!”
The Robotic Servicing Arm is a multi-jointed powerhouse designed to function like a “human arm” as much as possible. It builds on extensive prior research and development investment efforts conducted for NASA’s current Red Planetrovers and a flight-qualified robotic arm developed for the Defense Advanced Research Projects Agency (DARPA).
“The arm is capable of seven-degrees-of-freedom to mimic the full functionally of a human arm. It has heritage from the arm on Mars right now on Curiosity as well as ground based programs from DARPA,” Reed told me.
“It has three degrees of freedom at our shoulder, two at our elbow and two more at the wrist. So I can hold the hand still and move the elbow.”
The arm will also be equipped with a variety of interchangeable “hands” that are basically tools to carry out different tasks with the asteroid such as grappling, drilling, sample gathering, imaging and spectrometric analysis, etc.
View of the robotic arm above and gripper tool below that initially grabs the asteroid boulder before the capture legs wrap around as planned for NASA’s upcoming unmanned ARRM Asteroid Redirect Robotic Mission that will later dock with an Orion crew vehicle. Credit: Ken Kremer/kenkremer.com
The ARRM spacecraft will carefully study, characterize and photograph the asteroid in great detail for about a month before attempting the boulder capture.
Why does the arm need all this human-like capability?
“When we arrive at an asteroid that’s 100 million miles away, we are not going to know the fine local geometry until we arrive,” Reed explained to Universe Today.
“Therefore we need a flexible enough arm that can accommodate local geometries at the multi-foot scale. And then a gripper tool that can handle those geometry facets at a much smaller scale.”
“Therefore we chose seven-degrees-of-freedom to mimic humans very much by design. We also need seven-degrees-of-freedom to conduct collision avoidance maneuvers. You can’t do that with a six-degree-of-freedom arm. It has to be seven to be a general purpose arm.”
How will the ARRM capture module work to snatch the boulder off the asteroid?
“So the idea is you come to the mother asteroid and touch down and make contact on the surface. Then you hold that position and the two arms reach out and grab the boulder.”
“Once its grabbed the boulder, then the legs straighten and pull the boulder off the surface.”
“Then the arms nestle the asteroid onto a cradle. And the legs then change from a contact system to become a restraint system. So the legs wrap around the boulder to restrain it for the 100 million mile journey back home.
“After that the little arms can let go – because the legs have wrapped around and are holding the asteroid.”
“So now the arm can also let go of the gripper system and pick up a different tool to do other things. For example they can collect a sample with another tool. And maybe assist an astronaut after the crew arrives.”
“During the 100 million mile journey back to lunar orbit they can be also be preparing the surface and cutting into it for later sample collection by the astronauts.”
Be sure to watch this video animation:
Since the actual asteroid encounter will occur very far away, the boulder grappling will have to be done fully autonomously since there will be no possibility for real time communications.
“The return time for communications is like about 30 minutes. So ‘human in the loop’ control is out of the question.
“Once we get into hover position over the landing site we hit the GO button. Then it will be very much like at Mars and the seven minutes of terror. It will take awhile to find out if it worked.”
Therefore the team at Goddard has already spent years of effort and practice sessions just to get ready for working with the early engineering version of the arm to maximize the probability of a successful capture.
“In this facility we put systems together to try and practice and rehearse and simulate as much of the mission as is realistically possible.”
“It took a lot of effort to get to this point, in the neighborhood of four years to get the simulation to behave correctly in real time with contact dynamics and the robotic systems. So the arm has to touch the boulder with force torque sensors and feed that into a computer to measure that and move the actuators to respond accordingly.”
“So the capture of the boulder is autonomous. The rest is teleoperated from the ground, but not the capture itself.”
How realistic are the rehearsals?
“We are practicing here by reaching out with the arm to grasp the client target using autonomous capture [procedures]. In space the client [target] is floating and maybe tumbling. So when we reach out with the arm to practice autonomous capture we make the client tumble and move – with the inertial properties of the target we are practicing on.”
“Now for known objects like satellites we know the mass precisely. And we can program all that inertial property data in very accurately to give us much more realistic simulations.”
“We learned from all our astronaut servicing experiences in orbit is that the more we know for the simulations, the easier and better the results are for the astronauts during an actual mission because you simulated all the properties.”
“But with this robotic mission to an asteroid there is no backup like astronauts. So we want to practice here at Goddard and simulate the space environment.”
ARRM will launch by the end of 2020 on either an SLS, Delta IV Heavy or a Falcon Heavy. NASA has not yet chosen the launch vehicle.
Several candidate asteroids have already been discovered and NASA has an extensive ongoing program to find more.
Orion crew capsule docks to NASA’s asteroid redirect vehicle grappling captured asteroid boulder orbiting the Moon. Credit: NASA
Again, this robotic technology was selected for development for ARRM because it has a lot in common with other objectives like fixing communications satellites, refueling satellites and building large telescopes in the future.
NASA is also developing other critical enabling technologies for the entire ARM project like solar electric propulsion that will be the subject of another article.
Therefore NASA is leveraging one technology development program into multiple spaceflight objectives that will greatly assist its plans to send ‘Humans to Mars’ in the 2030s with the Orion crew module launched by the monster Space Launch System (SLS) rocket.
The maiden uncrewed launch of the Orion/SLS stack is slated for November 2018.
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
At NASA Goddard robotics lab Ben Reed/NASA Satellite Servicing Capabilities Office (SSCO) Deputy Project Manager and Ken Kremer/Universe Today discuss the robotic servicing arm and asteroid boulder capture mechanism being tested for NASA’s upcoming unmanned ARRM Asteroid Redirect Robotic Mission that will dock with an Orion crew vehicle in lunar orbit by the mid 2020s for sample return collection. Credit: Ken Kremer/kenkremer.com
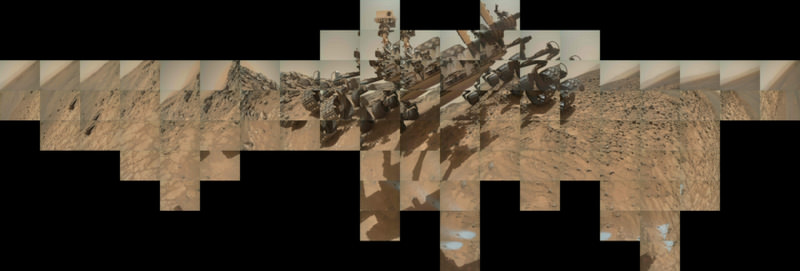
This self-portrait of NASA's Curiosity Mars rover shows the vehicle at the "Big Sky" site. Credit: NASA/JPL-Caltech/MSSS
Every time the Curiosity rover takes a ‘selfie’ on Mars, we get the same questions: “How was this picture taken?” “Why isn’t the rover’s arm or the camera visible in this picture?” “In all of Curiosity’s selfies, the camera mast is never visible… why?” And (sigh) “What is NASA hiding???”
The answer is simple and quite logical. Look any selfie image you’ve taken. Does your hand show up in the picture?
No, because it is behind the camera.
The same is true with the rover’s arm. For the most part, it is behind the camera, so it isn’t part of the picture. In your own selfies, if you’ve done a good job of positioning things, your arm doesn’t appear in the photo either. For example, take a look at this selfie taken last night by Astronomy Cast co-host Pamela Gay of her co-host (and Universe Today publisher) Fraser Cain, along with their fellow speakers at the Next Frontiers Symposium at Ohio State University.
You’ll notice Pamela’s arm isn’t showing, even though she took the picture of herself, just like the rover takes pictures of itself.
Just think of the rover’s arm as the ultimate interplanetary selfie stick. The best selfie-stick pictures are where the stick doesn’t show up in the image and it appears you had your own photographer. That’s what happens with the Curiosity rover self-portraits.
It’s important to note that while the rover selfies look like they are just one single image taken by the wide-angle camera on the rover, it is actually a series of individual images stitched together. The picture above is made from dozens of images the rover took of itself with the Mars Hand Lens Imager (MAHLI) camera at the end of the rover’s robotic arm. Curiosity moves its robotic arm around and over itself and the ground, taking pictures from every angle. These pictures are then stitched, just like panoramic images are put together to form a complete image of your total view. The rover’s arm isn’t long enough to make the camera’s field of view big enough to get the entire rover in one shot (similar to how it works if you hold your camera/phone close to your face you only get one feature, like your nose or eyes, not your entire body.)
Update: As for the questions of why the rover’s arm doesn’t show up in these rover selfie images, I conferred with Guy Webster from JPL and he said that portions of the arm do show up in some of the images used to create the selfie shots, but the portion of the arm pictured is very limited, and the team feels it would be even more confusing to include the small parts of the arm that are in some of the images and so have decided to leave it out entirely.
“Some of the component images do indeed show glimpses of the arm,” Webster said via email. “There’s selectivity in choosing which parts of which component frames to use in assembling the mosaic, to avoid having discontinuous bits of arm in the scene. That would cause confusion even quicker than making choices that leave out the arm.”
For example, here is one image from the series of pictures taken by the MAHLI to create the selfie, and it shows just a small piece of the arm, near the “shoulder”:
A small portion of the Curiosity rover’s robotic arm (the white ‘tube’ on the top left of the image) shows up in one of the original raw images used to create the montage ‘selfie.’ Credit: NASA/JPL-Caltech/MSSS.
You can see the entire collection of MAHLI images from Sol 1126 (Oct. 6, 2015) here. You can see how few images show parts of the arm, and how little of the arm shows up in the ones that do.
For the most part, though, because of the flexibility of the robotic arm and the way it is able to move, the arm ends up behind the camera. As Curiosity’s Engineering Camera Team Leader Justin Maki explains in the video below, “The rover is imaging the deck while the arm is behind the camera, and then to image the ground … again the arm is behind the camera when taking these pictures. When we stitch them all together, you don’t see the arm in any of the pictures.”
Click on the image to start the video (which shows very well why the arm isn’t in most of the shots):
It’s interesting to note, that while the lead image above — the latest rover selfie — does not include the rover’s robotic arm, the shadow of the arm is visible on the ground. You’ll notice there seems to be an extra “joint” in the arm, which is just part of the image editing, particularly the stacking of the images where the ground is, where the image editors used more than one image for that area. For the selfie image below, taken in 2012, the imaging team chose not to include any shadow of the arm.
A color self-portrait photo of Curiosity standing on Mars, on sol 84 (October 31, 2012). The photo is a mosaic of images shot with MAHLI, the camera on the end of the robotic arm. Credit: NASA/JPL/MSSS.
Why does the rover imaging team take these rover selfies? Are they just joining in on the selfie craze here on Earth?
These images are actually a great way for the rover team to look at all the components on Curiosity and make sure everything looks like it’s in good shape. The wheels are of particular interest because there has been some damage to them from driving over sharp rocks. These images also document various areas where the rover has worked, and often include things like the holes the rover has drilled into the Martian rocks and soil.
Emily Lakdawalla at The Planetary Society has written an extremely detailed post on how the rover takes self-portraits. She created this composite image of the 72 individual frames the Mars Hand Lens Imager (MAHLI) had to take in order to cover the 360-degree view showing the rover’s underside, a “belly selfie“:
Curiosity’s arm-mounted MAHLI camera took 72 individual photos over a period of about an hour in order to cover the entire rover and a lower hemisphere including 360 degrees around the rover and more than 90 degrees of elevation. It took 2 tiers of 20 images to cover the entire horizon, and fewer images at lower elevations to cover the bottom of the image sphere. The arm was kept out of most of the images but it was impossible to keep the arm’s shadow from falling on the ground in positions immediately in front of the rover. Credit: NASA/JPL/MSSS/Emily Lakdawalla.
Here’s another longer video from JPL that explains all the rover’s cameras.
A mosaic of images from NASA’s Curiosity rover shows what appears to be a “selfie” with a Martian mountain (Aeolis Mons)in the background. Credit: NASA/JPL-Caltech /MSS/ Image editing by Jason Major.
This self-portrait of NASA's Curiosity Mars rover shows the vehicle at the "Big Sky" site. Credit: NASA/JPL-Caltech/MSSS
This self-portrait of NASA’s Curiosity Mars rover shows the vehicle at the “Big Sky” site, where its drill collected the mission’s fifth taste of Mount Sharp, at lower left corner. The scene combines images taken by the Mars Hand Lens Imager (MAHLI) camera on Sol 1126 (Oct. 6, 2015). Credit: NASA/JPL-Caltech/MSSS
See below navcam drilling photo mosaic at Big Sky[/caption]
NASA’s Curiosity rover has managed to snap another gorgeous selfie while she was hard at work diligently completing her newest Martian sample drilling campaign – at the ‘Big Sky’ site at the base of Mount Sharp, the humongous mountain dominating the center of the mission’s Gale Crater landing site – which the science team just confirmed was home to a life bolstering ancient lake based on earlier sample analyses.
And the team is already actively planning for the car sized robots next drill campaign in the next few sols, or Martian days!
Overall ‘Big Sky’ marks Curiosity’s fifth ‘taste’ of Mount Sharp – since arriving at the mountain base one year ago – and eighth drilling operation since the nail biting Martian touchdown in August 2012.
NASA’s newly published self-portrait was stitched from dozens of images taken at Big Sky last week on Oct. 6, 2015, or Sol 1126, by the high resolution Mars Hand Lens Imager (MAHLI) color camera at the end of the rover’s 7 foot long robotic arm. The view is centered toward the west-northwest.
At Big Sky, the Curiosity Mars Science Laboratory (MSL) bored into an area of cross-bedded sandstone rock in the Stimson geological unit on Sept. 29, or Sol 1119. Stimson is located on the lower slopes of Mount Sharp inside Gale Crater.
NASA Curiosity rover reaches out with robotic arm to drill into cross-bedded sandstone rock at ‘Big Sky’ target on Sol 1119, Sept. 29, 2015, in this photo mosaic stitched from navcam camera raw images and colorized. Big Sky is located in the Stimson unit on the lower slopes of Mount Sharp inside Gale Crater. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
“Success! Our drill at “Big Sky” went perfectly!” wrote Ryan Anderson, a planetary scientist at the USGS Astrogeology Science Center and a member of the Curiosity ChemCam team.
The drill hole is seen at the lower left corner of the MAHLI camera selfie and appears grey along with grey colored tailing – in sharp contrast to the rust red surface. The hole itself is 0.63 inch (1.6 centimeters) in diameter.
Another panoramic view of the ‘Big Sky’ location shot from the rover’s eye perspective with the mast mounted Navcam camera, is shown in our photo mosaic view herein and created by the image processing team of Ken Kremer and Marco Di Lorenzo. The navcam mosaic was stitched from raw images taken up to Sol 1119 and colorized.
“With Big Sky, we found the ordinary sandstone rock we were looking for,” said Curiosity Project Scientist Ashwin Vasavada, in a statement.
The Big Sky drilling operation is part of a coordinated multi-step campaign to examine different types of sandstone rocks to provide geologic context.
“It also happens to be relatively near sandstone that looks as though it has been altered by fluids — likely groundwater with other dissolved chemicals. We are hoping to drill that rock next, compare the results, and understand what changes have taken place.”
Per normal operating procedures, the Big Sky sample was collected for analysis of the Martian rock’s ingredients in the rover’s two onboard laboratories – the Chemistry and Mineralogy X-Ray diffractometer (CheMin) and the Sample Analysis at Mars (SAM) instrument suite.
“We are all eagerly looking forward to the CheMin results from Big Sky to compare with our previous results from “Buckskin”! noted Anderson.
Curiosity extends robotic arm and conducts sample drilling at “Buckskin” rock target at bright toned “Lion” outcrop at the base of Mount Sharp on Mars, seen at right. Gale Crater eroded rim seen in the distant background at left, in this composite multisol mosaic of navcam raw images taken to Sol 1059, July 30, 2015. Navcam camera raw images stitched and colorized. Inset: MAHLI color camera up close image of full depth drill hole at “Buckskin” rock target on Sol 1060. Credit: NASA/JPL-Caltech/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
This past weekend, Curiosity successfully fed pulverized and sieved samples of Big Sky to the inlet ports for both CheMin and SAM on the rover deck.
“The SAM analysis of the Big Sky drill sample went well and there is no need for another analysis, so the rest of the sample will be dumped out of CHIMRA on Sol 1132,” said Ken Herkenhoff, Research Geologist at the USGS Astrogeology Science Center and an MSL science team member, in a mission update.
Concurrently the team is hard at work readying the rover for the next drill campaign within days, likely at a target dubbed “Greenhorn.”
So the six wheeled rover drove about seven meters to get within range of Greenhorn.
With the sample deliveries accomplished, attention shifted to the next drilling campaign.
Today, Wednesday, Oct. 14, or Sol 1133, Curiosity was commanded “to dump the “Big Sky” sample and “thwack” CHIMRA (the Collection and Handling for in-Situ Martian Rock Analysis) to clean out any remnants of the sample,” wrote Lauren Edgar, a Research Geologist at the USGS Astrogeology Science Center and a member of MSL science team, in a mission update.
The ChemCam and Mastcam instruments are simultaneously making observations of the “Greenhorn” and “Gallatin Pass” targets “to assess chemical variations across a fracture.”
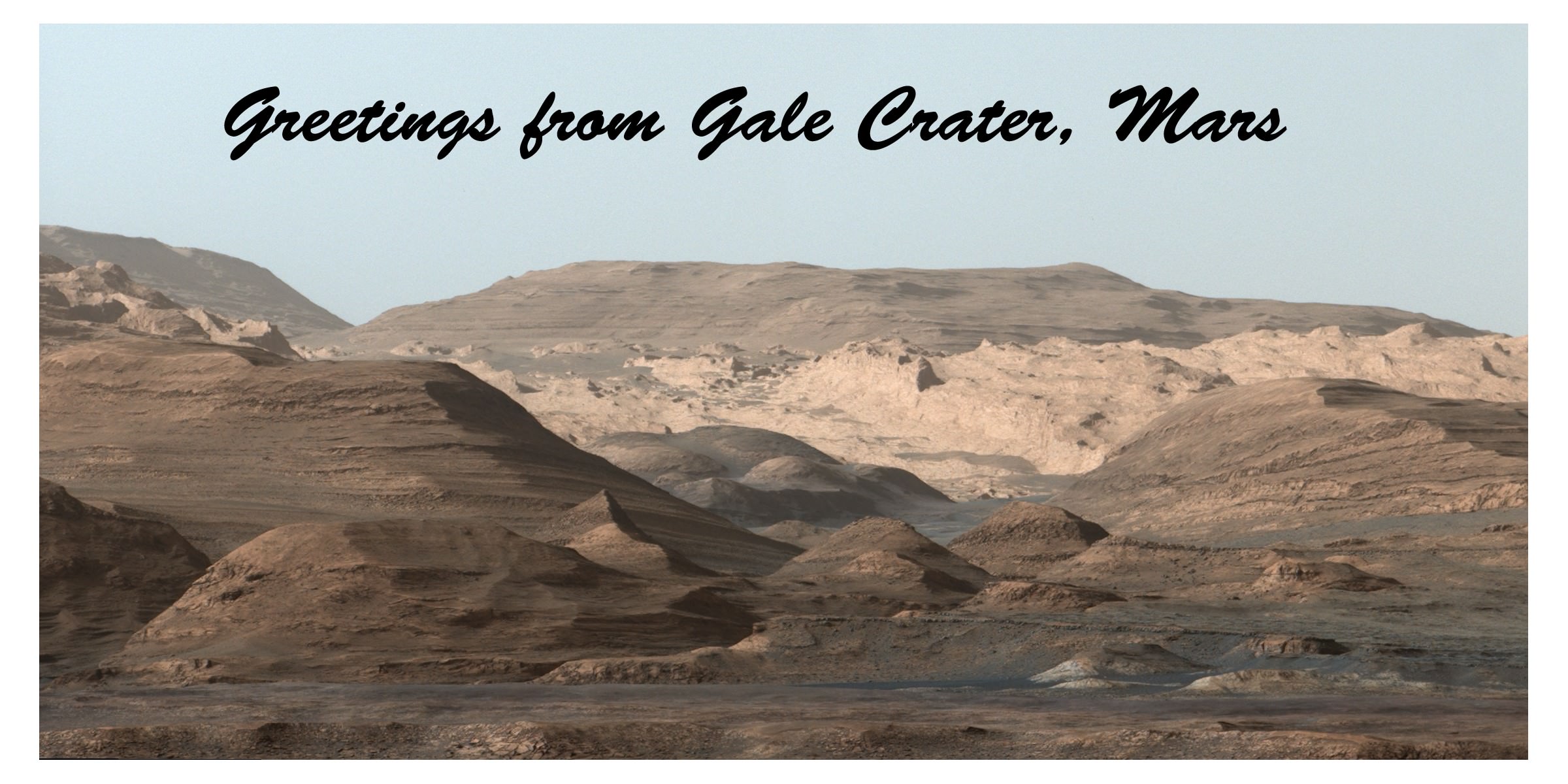
This Martian “postcard” comes after Mars Curiosity drilled its eighth hole on the Red Planet. This composite image looking toward the higher regions of Mount Sharp was taken on September 9, 2015, by NASA’s Curiosity rover. In the foreground — about 2 miles (3 kilometers) from the rover — is a long ridge teeming with hematite, an iron oxide. Credits: NASA/JPL-Caltech/MSSS
Curiosity has already accomplished her primary objective of discovering a habitable zone on the Red Planet – at the Yellowknife Bay area – that contains the minerals necessary to support microbial life in the ancient past when Mars was far wetter and warmer billions of years ago.
As of today, Sol 1133, October 14, 2015, she has driven some 6.9 miles (11.1 kilometers) kilometers and taken over 274,600 amazing images.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
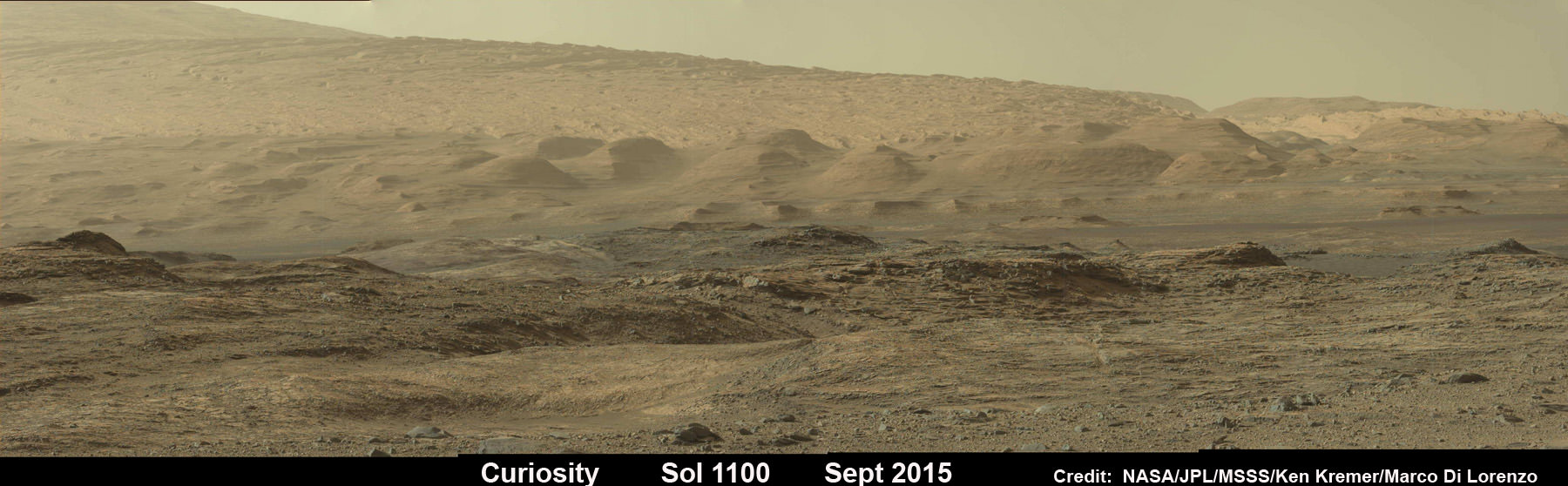
Curiosity looks toward fabulous canyons and buttes at the base of Mount Sharp from the Stimson sand dunes on Mars on Sol 1100, Sept. 10 2015 in this photo mosaic stitched from Mastcam color camera raw images. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
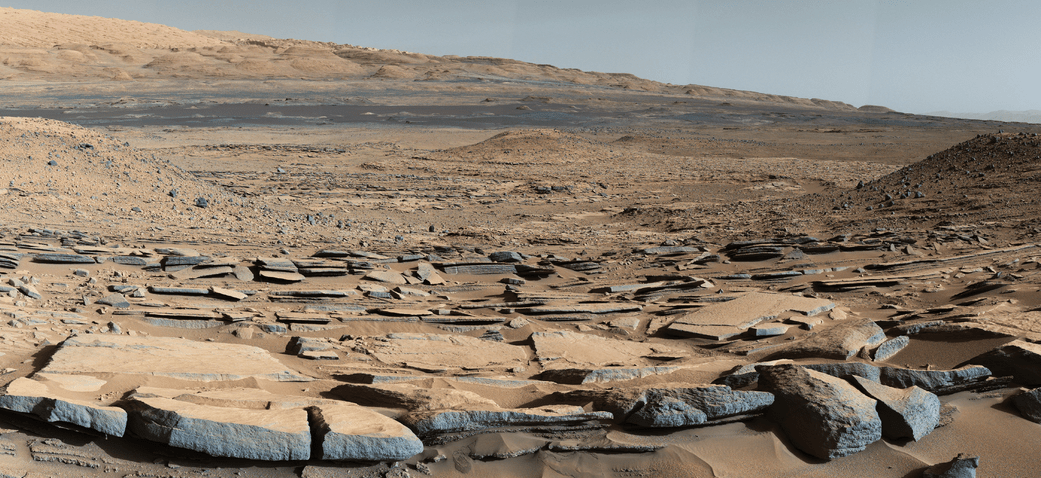
A view from the "Kimberley" formation on Mars taken by NASA's Curiosity rover. The strata in the foreground dip towards the base of Mount Sharp, indicating flow of water toward a basin that existed before the larger bulk of the mountain formed. This image was taken by the Mast Camera (Mastcam) on Curiosity on Sol 580 of the mission and has been “white balanced” to adjust for the lighting on Mars make the sky appear light blue. Credits: NASA/JPL-Caltech/MSSS
A view from the “Kimberley” formation on Mars taken by NASA’s Curiosity rover. The strata in the foreground dip towards the base of Mount Sharp, indicating flow of water toward a basin that existed before the larger bulk of the mountain formed. This image was taken by the Mast Camera (Mastcam) on Curiosity on Sol 580 of the mission and has been “white balanced” to adjust for the lighting on Mars make the sky appear light blue. Credits: NASA/JPL-Caltech/MSSS
Story/imagery updated[/caption]
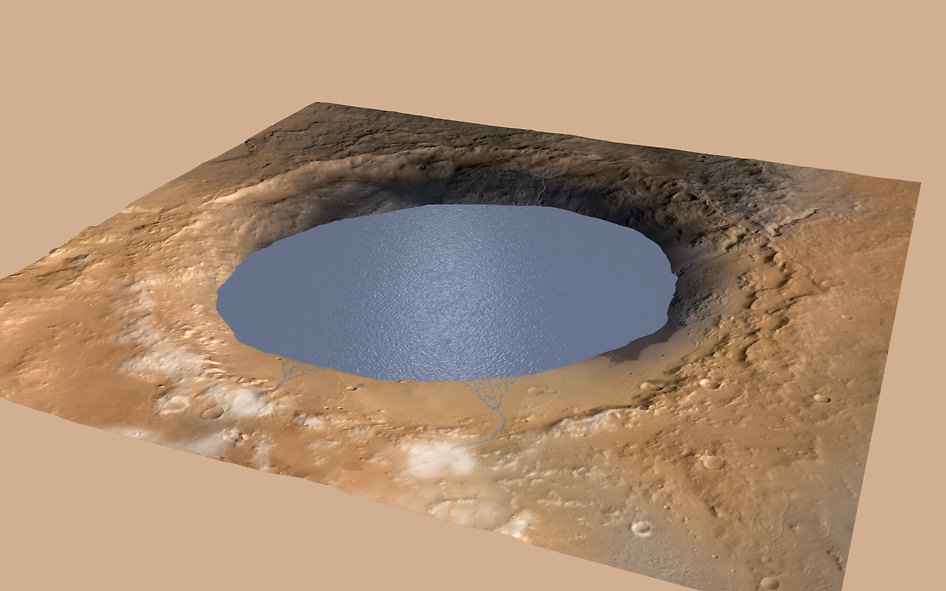
Hot on the heels of NASA’s groundbreaking announcement on Sept. 28 of the discovery that “liquid water flows intermittently” across multiple spots on the surface of today’s Mars, scientists leading NASA’s Curiosity rover mission have confirmed that an ancient lake once filled the Gale Crater site which the robot has been methodically exploring since safely landing back in August 2012 near the base of a layered mountain known as Mount Sharp.
The new research finding from the Curiosity team was just published in the journal Science on Friday, Oct. 9, and boosts the chances that alien life may have taken hold in the form of past or present day Martian microbes.
The article is titled “Wet Paleoclimate of Mars Revealed by Ancient Lakes at Gale Crater,” with John Grotzinger, the former project scientist for the Mars Science Laboratory (MSL) mission at the California Institute of Technology in Pasadena, as lead author of the new report.
Simulated view of Gale Crater Lake on Mars. This illustration depicts a lake of water partially filling Mars’ Gale Crater, receiving runoff from snow melting on the crater’s northern rim. Credit: NASA/JPL-Caltech/ESA/DLR/FU Berlin/MSSS
The new study is coauthored by four dozen team members intimately involved in Curiosity’s ongoing exploits and “confirmed that Mars was once, billions of years ago, capable of storing water in lakes over an extended period of time.”
“Observations from the rover suggest that a series of long-lived streams and lakes existed at some point between about 3.8 to 3.3 billion years ago, delivering sediment that slowly built up the lower layers of Mount Sharp,” said Ashwin Vasavada, current MSL project scientist at NASA’s Jet Propulsion Laboratory in Pasadena, California, and co-author of the new report, in a statement.
Over the past three years, the Curiosity Mars Science Laboratory rover has been traversing the floor of Gale Crater investigating scores of different rocks and outcrops with her suite of state-of-the-art instruments, and painstakingly analyzing drill samples cored from their interiors with a pair of chemistry labs to elucidate the history of Mars based on NASA’s “follow the water” mantra.
The soundness of NASA Mars exploration strategy has repeatedly borne fruit and is now validated by overwhelming measurements gathered during Curiosity’s epic Martian trek confirming the existence of a lake where Mount Sharp now stands.
Exploring the sedimentary layers of Mount Sharp, which towers 3.4 miles (5.5 kilometers) into the Martian sky, is the primary destination and goal of the rovers long term scientific expedition on the Red Planet.
Since the nail biting touchdown on Aug. 5, 2012, Curiosity has been on a path towards the sedimentary layers at the lower reaches of Mount Sharp at the center of Gale Crater.
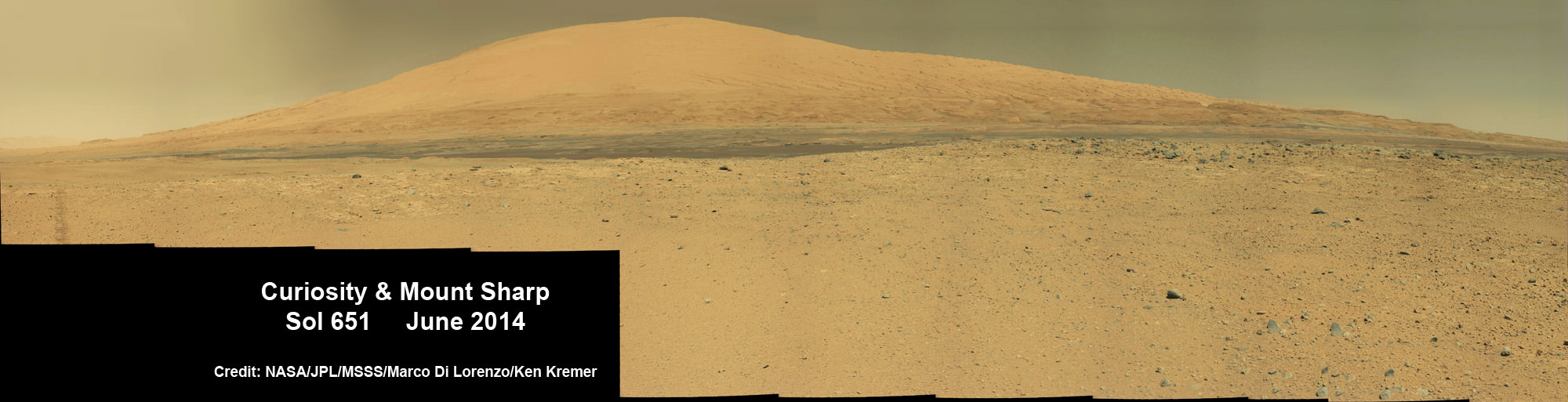
Curiosity rover panorama of Mount Sharp captured on June 6, 2014 (Sol 651) during traverse inside Gale Crater. Note rover wheel tracks at left. She will eventually ascend the mountain at the ‘Murray Buttes’ at right later this year. Assembled from Mastcam color camera raw images and stitched by Marco Di Lorenzo and Ken Kremer. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer-kenkremer.com
The car sized robot arrived at the foothills of Mount Sharp a year ago in September 2014, marking the start of the mountains formal investigation.
But the origin of Mount Sharp has been up for debate.
With the new data, researchers believe that the ancient lake helped fill Gale Crater with sediments deposited in layers over time that formed the foundation for Mount Sharp which now dominates the center of the crater.
“What we thought we knew about water on Mars is constantly being put to the test,” said Michael Meyer, lead scientist for NASA’s Mars Exploration Program at NASA Headquarters in Washington.
“It’s clear that the Mars of billions of years ago more closely resembled Earth than it does today. Our challenge is to figure out how this more clement Mars was even possible, and what happened to that wetter Mars.”
Mars was far wetter and warmer and possessed a much more massive atmosphere billions of years ago than it does today.
An image taken at the “Hidden Valley” site, en-route to Mount Sharp, by NASA’s Curiosity rover. A variety of mudstone strata in the area indicate a lakebed deposit, with river- and stream-related deposits nearby. This image was taken by the Mast Camera (Mastcam) on Curiosity on Sol 703. Credits: NASA/JPL-Caltech/MSSS
Gale Crater lake existed long before Mount Sharp ever formed during that period billions of years ago when the Red Planet was far warmer and wetter.
“Paradoxically, where there is a mountain today there was once a basin, and it was sometimes filled with water,” said Grotzinger, in a statement.
“We see evidence of about 250 feet (75 meters) of sedimentary fill, and based on mapping data from NASA’s Mars Reconnaissance Orbiter and images from Curiosity’s camera, it appears that the water-transported sedimentary deposition could have extended at least 500 to 650 feet (150 to 200) meters above the crater floor.”
Indeed there is additional evidence that the sedimentary deposits from interaction with water may be as thick as one-half mile (800 meters) above the crater floor. However beyond that there is no evidence of hydrated strata further up Mount Sharp.
But for reasons we are still trying to decipher and comprehend, Mars underwent radical climactic change between 3 and 4 billion years ago and was transformed from an ancient wet world, potentially hospitable to life, to a cold, dry desiccated world, rather inhospitable to life, that exists today.
Curiosity’s Panoramic view of Mount Remarkable at ‘The Kimberley Waypoint’ where rover conducted 3rd drilling campaign inside Gale Crater on Mars. The navcam raw images were taken on Sol 603, April 17, 2014, stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer – kenkremer.com/Marco Di Lorenzo. Featured on APOD – Astronomy Picture of the Day on May 7, 2014
Unlocking the mysteries, mechanisms and time periods of Mars climate change, loss of a thick atmosphere, ability to sustain liquid surface water and searching for organic compounds and for evidence of past or present habitable zones favorable to life are the questions driving NASA’s Mars Exploration program
Curiosity has already accomplished her primary objective of discovering a habitable zone on the Red Planet – at the Yellowknife Bay area – that contains the minerals necessary to support microbial life in the ancient past when Mars was far wetter and warmer billions of years ago.
NASA’s Curiosity rover looks back to ramp with potential 4th drill site target at ‘Bonanza King’ rock outcrop in ‘Hidden Valley’ in this photo mosaic view captured on Aug. 6, 2014, Sol 711. Inset shows results of brushing on Aug. 17, Sol 722, that revealed gray patch beneath red dust. Note the rover’s partial selfie, valley walls, deep wheel tracks in the sand dunes and distant rim of Gale crater beyond the ramp. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer-kenkremer.com/Marco Di Lorenzo
“We have tended to think of Mars as being simple,” Grotzinger mused. “We once thought of the Earth as being simple too. But the more you look into it, questions come up because you’re beginning to fathom the real complexity of what we see on Mars. This is a good time to go back to reevaluate all our assumptions. Something is missing somewhere.”
As of today, Sol 1129, October 10, 2015, she has driven some 6.9 miles (11.1 kilometers) kilometers and taken over 274,000 amazing images.
Curiosity is at the vanguard of Earth’s fleet of seven robotic missions paving the path for NASA’s plans to send humans on a ‘Journey to Mars’ in the 2030s.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
Curiosity Mars rover captured this panoramic view of a butte called “Mount Remarkable” and surrounding outcrops at “The Kimberley ” waypoint on April 11, 2014, Sol 597. Colorized navcam photomosaic was stitched by Marco Di Lorenzo and Ken Kremer. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer – kenkremer.com