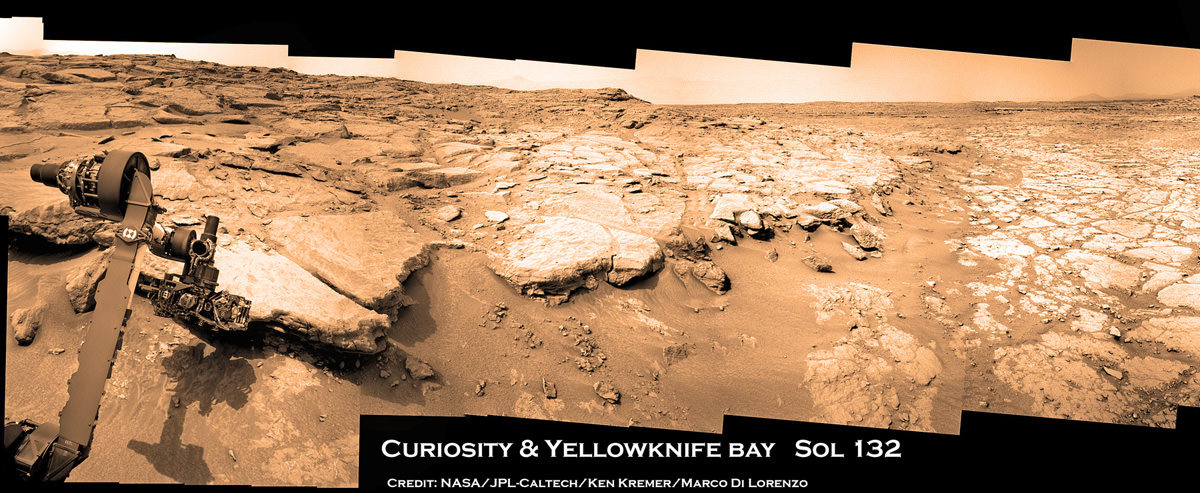
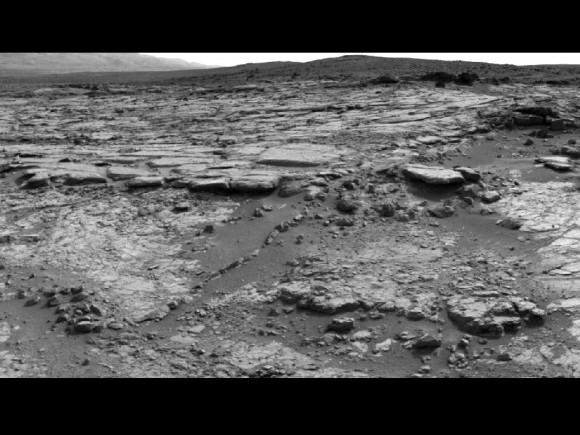
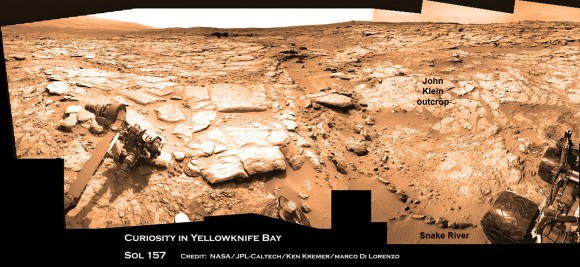
Curiosity found widespread evidence for flowing water in the highly diverse, rocky scenery shown in this photo mosaic from the edge of Yellowknife Bay on Sol 157 (Jan 14, 2013). The rover will soon conduct 1st Martian rock drilling operation at flat, light toned rocks at the outcrop called “John Klein”, at center. ‘John Klein’ drill site and ‘Sheep Bed’ outcrop ledges to right of rover arm are filled with numerous mineral veins and spherical concretions which strongly suggest precipitation of minerals from liquid water. ‘Snake River’ rock formation is the linear chain of rocks protruding up from the Martian sand near rover wheel. Credit: NASA/JPL-Caltech/Ken Kremer/Marco Di Lorenzo
The Curiosity rover hit the science “jackpot” and has discovered widespread further evidence of multiple episodes of liquid water flowing over ancient Mars billions of years ago when the planet was warmer and wetter, scientists announced. The watery evidence comes in the form of water bearing mineral veins, cross-bedded layering, nodules and spherical sedimentary concretions.
Any day now NASA’s mega robot will be instructed to drill directly into veined rocks where water once flowed, the team announced at a media briefing this week.
Delighted researchers said Curiosity surprisingly found lots of evidence for light-toned chains of linear mineral veins inside fractured rocks littering the highly diverse Martian terrain – using her array of ten state-of-the-art science instruments. Veins form when liquid water circulates through fractures and deposit minerals, gradually filling the insides of the fractured rocks over time.
Sometime in the next two weeks or so, NASA’s car sized rover will carry out history’s first ever drilling inside a Martian rock that was “percolated” by liquid water – an essential prerequisite for life as we know. A powdered sample will then be delivered to the robots duo of analytical chemistry labs (CheMin & SAM) to determine its elemental composition and ascertain whether organic molecules are present.
The drill target area is named “John Klein” outcrop, in tribute to a team member who was the deputy project manager for Curiosity at JPL for several years and who passed away in 2011.
“We identified a potential drill target and are preparing to do drill activities in the next two weeks. We are ready to go,” said Richard Cook, the project manager of NASA’s Jet Propulsion Laboratory (JPL) in Pasadena, Calif.
“Drilling [into a rock] is the most significant engineering activity since landing. It is the most difficult aspect of the surface mission, interacting with an unknown surface terrain, and has never been done on Mars. We will go slowly. It will take some time to deliver samples to CheMin and SAM and will be a great set of scientific measurements.”
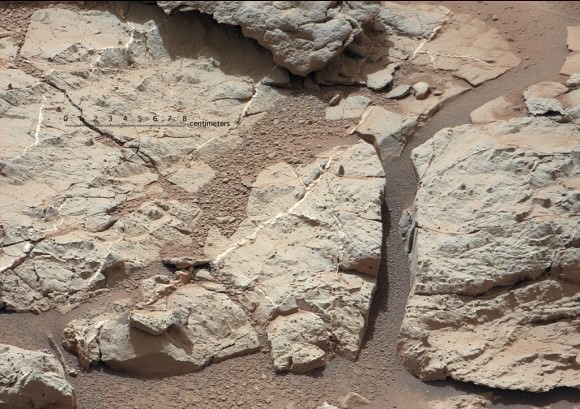
Image caption: Mineral veins of calcium sulfate discovered by Curiosity at ‘Sheepbed’ Outcrop. These veins form when water circulates through fractures, depositing minerals along the sides of the fracture, to form a vein. These vein fills are characteristic of the stratigraphically lowest unit in the “Yellowknife Bay” area where Curiosity is currently exploring and were imaged on Sol 126 (Dec. 13, 2012) by the telephoto Mastcam camera. Image has been white-balanced. Credit: NASA/JPL-Caltech/MSSS
“The scientists have been let into the candy store,” said Cook referring to the unexpected wealth of science targets surrounding the rover at this moment.
“There is a high diversity of rocks types here to characterize,” added Mike Malin, Mastcam principal investigator of Malin Space Science Systems (MSSS). “We see layering, veins and concretions. The area is still undergoing some changes.”
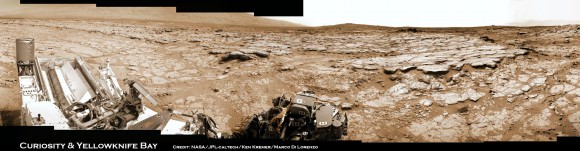
Curiosity is just a few meters away from ‘John Klein’ and will drive to the site shortly from her location inside ‘Yellowknife Bay’ beside the ‘Snake River’ rock formation. To see where Curiosity is in context with ‘John Klein’ and “Snake River’, see our annotated context mosaic (by Ken Kremer & Marco Di Lorenzo) as the rover collects data at a rock ledge.
The white colored veins were discovered over the past few weeks- using the high resolution mast- mounted imaging cameras and ChemCam laser firing spectrometer -at exactly the vicinity where Curiosity is currently investigating ; around a shallow basin called Yellowknife Bay and roughly a half mile away from the landing site inside Gale Crater.
“This lowest unit that we are at in Yellowknife Bay, the very farthest thing we drove to, turns out to be kind of the ‘jackpot’ unit here,” said John Grotzinger, the mission’s chief scientist of the California Institute of Technology. “It is literally shot through with these fractures and vein fills.”
![pia16567-43[1]](https://www.universetoday.com/wp-content/uploads/2013/01/pia16567-431-580x435.jpg)
Image caption: ‘John Klein’ Site Selected for Curiosity’s Drill Debut. This view shows the patch of veined, flat-lying rock selected as the first drilling site. The rover’s right Mast Camera equipped with a telephoto lens, was about 16 feet (5 meters) away from the site when it recorded this mosaic on sol 153 (Jan. 10, 2013). The area is shot full of fractures and veins, with the intervening rock also containing concretions, which are small spherical concentrations of minerals. Enlargement A shows a high concentration of ridge-like veins protruding above the surface. Some of the veins have two walls and an eroded interior. Enlargement B shows that in some portions of this feature, there is a horizontal discontinuity a few centimeters or inches beneath the surface. The discontinuity may be a bed, a fracture, or potentially a horizontal vein. Enlargement C shows a hole developed in the sand that overlies a fracture, implying infiltration of sand down into the fracture system. Image has been white-balanced. Credit: NASA/JPL-Caltech/MSSS
Shortly after landing the team took a calculated gamble and decided to take a several months long detour away from the main destination of the towering, sedimentary mountain named Mount Sharp, and instead drive to an area dubbed ‘Glenelg’ and home to ‘Yellowknife Bay’, because it sits at the junction of a trio of different geologic terrains. Glenelg exhibits high thermal inertia and helps put the entire region in better scientific context. The gamble has clearly payed off.
“We chose to go there because we saw something anomalous, but wouldn’t have predicted any of this from orbit,” said Grotzinger.
The Chemistry and Camera (ChemCam) instrument found elevated levels of calcium, sulfur and hydrogen. Hydrogen is indicative of water.
The mineral veins are probably comprised of calcium sulfate – which exists in several hydrated (water bearing) forms.
“The ChemCam spectra point to a composition very high in calcium. These veins are likely composed of hydrated calcium sulfate, such as bassinite or gypsum, depending on the hydration state,” said ChemCam team member Nicolas Mangold of the Laboratoire de Planétologie et Géodynamique de Nantes in France. “On Earth, forming veins like these requires water circulating in fractures and occur at low to moderate temperatures.”
The newly found veins appear quite similar to analogous veins discovered in late 2011 by NASA’s Opportunity rover – Curiosity’s older sister – inside Endeavour crater and nearly on the opposite side of Mars. See our Opportunity vein mosaic featured at APOD on Dec. 11, 2011 to learn more about veined rocks.
“What these vein fills tell us is water moved and percolated through these rocks, through these fracture networks and then minerals precipitated to form the white material which ChemCam has concluded is very likely a calcium sulfate, probably hydrated in origin,” Grotzinger explained.
“So this is the first time in this mission that we have seen something that is not just an aqueous environment, but one that also results in precipitation of minerals, which is very attractive to us.”
Yellowknife Bay and the ‘John Klein’ drilling area outcrop are chock full of mineral veins and sedimentary concretions.
“When you put all this together it says that basically these rocks were saturated with water. There may be several phases to this history of water, but that’s still to be worked out.”
“This has been really exciting and we can’t wait to start drilling,” Grotzinger emphasized.
Curiosity can drill about 2 inches (5 cm) into rocks. Ultimately a powdered sample about half an aspirin tablet in size will be delivered to SAM and CheMin after a few weeks. All rover systems and instruments are healthy, said Cook.
Grotzinger said that Curiosity will be instructed to drive over the veins to try and break them up and expose fresh surfaces for analysis. Then she will drill directly into a vein and hopefully catch some of the surrounding material as well.
“This will reveal the mineralogy of the vein filling material and how many hydrated mineral phases are present. The main goal is this will give us an assessment of the habitability of this environment.”
As the rover has driven down the shallow depression to deeper stratigraphic layers, the units are older in time.
After the first drill sample is fully analyzed, Grotzinger told me that the team will reevaluate whether to drill into a second rock.
The team doesn’t yet know whether the flowing water from which the veins precipitated was a more neutral pH or more acidic. “It’s too early to tell. We need to drill into the rock to tell and determine the mineralogy,” Grotzinger told me. Neutral water is more hospitable to life.
How long the episodes of water flowed is not yet known and it’s a complex history. But the water was at least hip to ankle deep at times and able to transport and round the gravel.
“There are a broad variety of sedimentary rocks here, transported from elsewhere. Mars was geologically active in this location, which is totally cool !,” said Aileen Yingst, MAHLI deputy principal investigator. ”There are a number of different transport mechanisms in play.”
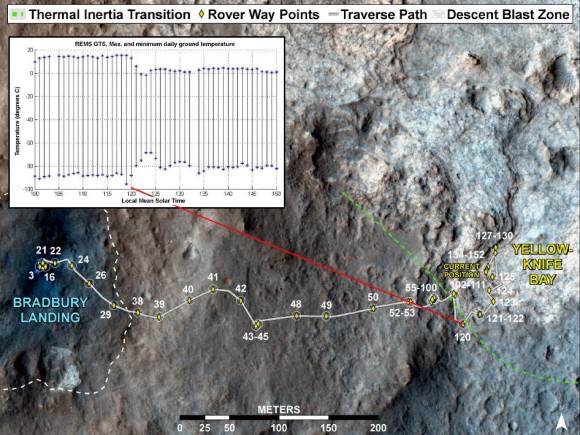
Image caption: Curiosity’s Traverse into Different Terrain. This image maps the traverse of NASA’s Mars rover Curiosity from “Bradbury Landing” to “Yellowknife Bay,” with an inset documenting a change in the ground’s thermal properties with arrival at a different type of terrain. credit: NASA/JPL-Caltech/Univ. of Arizona/CAB(CSIC-INTA)/FMI
Drilling goes to the heart of the mission and will mark a historic feat in planetary exploration – as the first time that an indigenous sample has been cored from the interior of a rock on another planet and subsequently analyzed by chemical spectrometers to determine its elemental composition and determine if organic molecules are present .
The high powered hammering drill is located on the tool turret at the end of the car-sized robots 7 foot (2.1 meter) long mechanical arm . It is the last of Curiosity’s ten instruments that remains to be checked out and put into action.
Curiosity landed on the Red Planet five months ago inside Gale Crater to investigate whether Mars ever offered an environment favorable for microbial life, past or present and is now nearly a quarter of the way through her two year prime mission.
Curiosity might reach the base of Mount Sharp by the end of 2013, which is about 6 miles (10 km) away as the Martian crow flies.
Ken Kremer
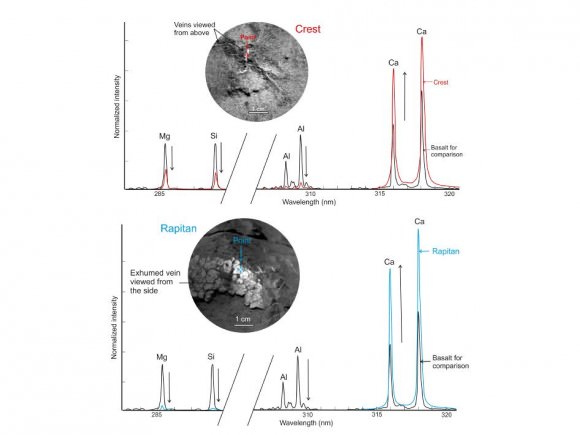
Image Caption: Calcium-Rich Veins in Martian Rocks. This graphic shows close-ups of light-toned veins in rocks in the “Yellowknife Bay” area of Mars together with analyses of their composition. The top part of the image shows a close-up of the rock named “Crest,” taken by the remote micro-imager (RMI) on Curiosity’s Chemistry and Camera (ChemCam) instrument above the analysis of the elements detected by using ChemCam’s laser to zap the target. The spectral profile of Crest’s light-colored vein is shown in red, while that of a basaltic calibration target of known composition is shown in black. The bottom part of the image shows ChemCam’s close-up of the rock named “Rapitan” with the analysis of its elemental composition. The spectral profile of Rapitan’s light-colored vein is shown in blue, while that of a basaltic calibration target of known composition is shown in black. These results suggest the veins are unlike typical basaltic material. They are depleted in silica and composed of a calcium-bearing mineral. Credit: NASA/JPL-Caltech/LANL/CNES/IRAP/LPGNantes/CNRS
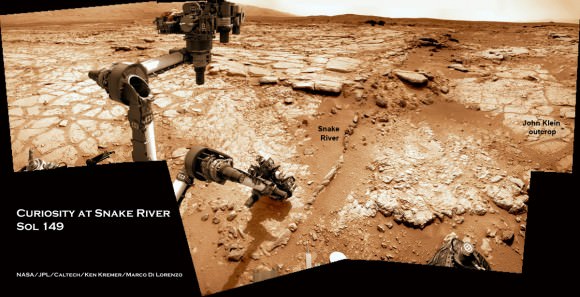
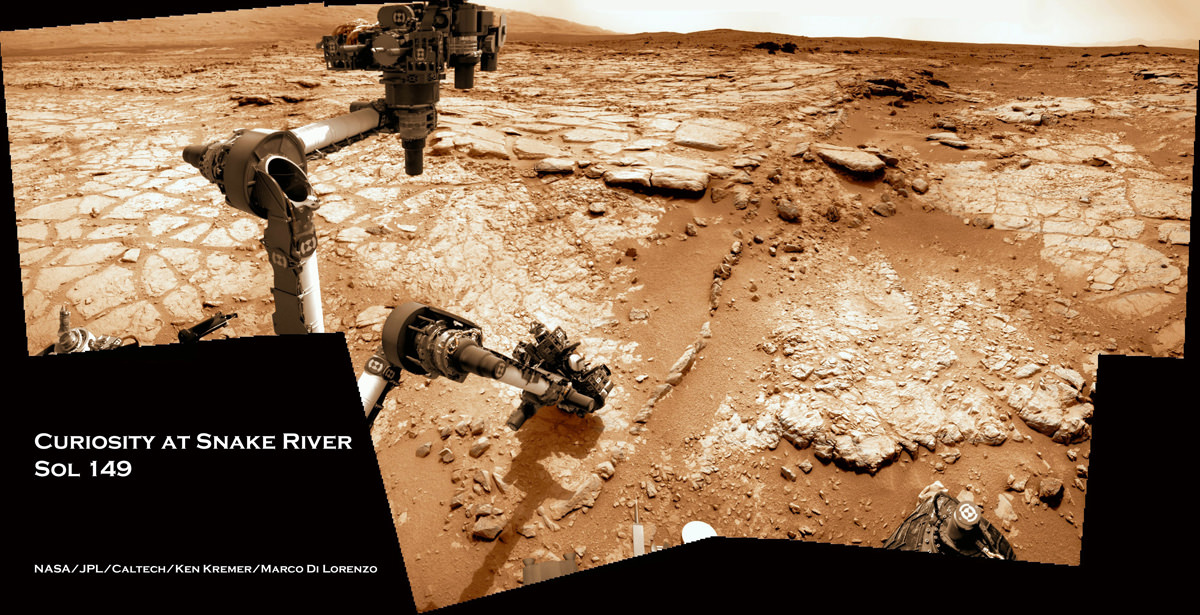
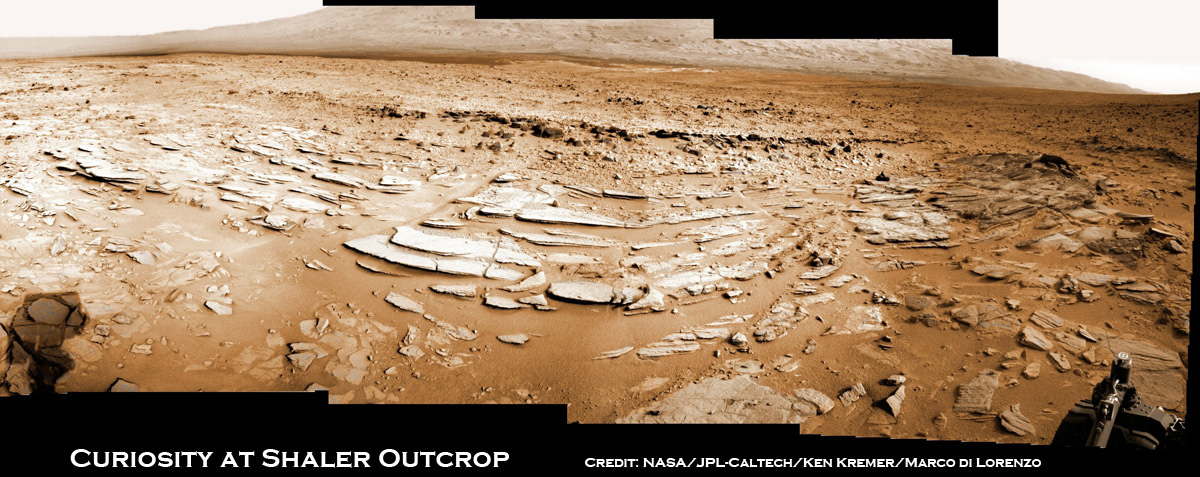
Image caption: Curiosity will carry out 1st rock drilling at ‘John Klein’ outcrop visible in this time lapse mosaic showing movements of Curiosity rover’s arm on Sol 149 (Jan. 5, 2013) at Yellowknife Bay basin where the rover has found widespread evidence for flowing water. Curiosity discovered hydrated mineral veins and concretions around the rock ledge ahead . She next drove there for contact science near the slithery chain of narrow protruding rocks known as ‘Snake River. Photomosaic stitched from Navcam raw images and colorized. Credit: NASA/JPL-Caltech/Ken Kremer/Marco Di Lorenzo





![8403941024_d82bee7a00_b[1]](https://www.universetoday.com/wp-content/uploads/2013/01/8403941024_d82bee7a00_b1-580x360.jpg)