A concept of a lunar railway network. (Made with Dall-E)
Roughly two years and six months from now, as part of NASA’s Artemis III mission, astronauts will set foot on the lunar surface for the first time in over fifty years. Beyond this mission, NASA will deploy the elements of the Lunar Gateway, the Artemis Base Camp, and other infrastructure that will allow for a “sustained program of lunar exploration and development.” They will be joined by the European Space Agency (ESA), the China National Space Agency (CNSA), and Roscosmos, the latter two collaborating to build the International Lunar Research Station (ILRS).
Anticipating this process of lunar development (and looking to facilitate it), the Defense Advanced Research Projects Agency (DARPA) launched the 10-year Lunar Architecture (LunA-10) Capability Study in August last year. In recent news, the agency announced that it selected Northrop Grumman to develop a moon-based railroad network. This envisioned network could transport humans, supplies, and resources for space agencies and commercial ventures, facilitating exploration, scientific research, and the creation of a lunar economy.
Artist's concept of a Lockheed design for a DRACO nuclear-powered demonstration spacecraft. Credit: Lockheed Martin.
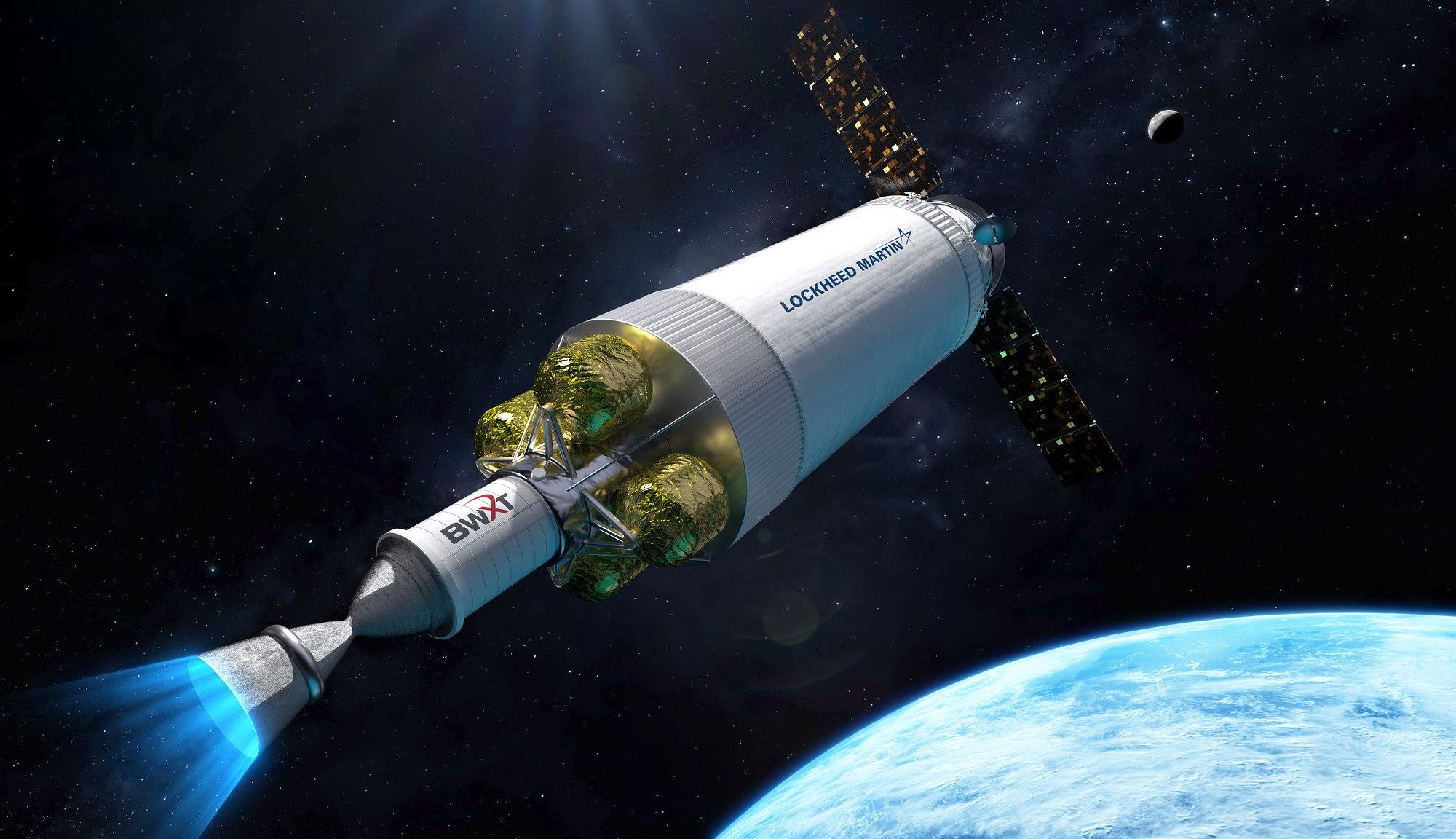
NASA plans to send astronauts to Mars in the coming decade. This presents many challenges, not the least of which is the distance involved and the resulting health risks. To this end, they are investigating and investing in many technologies, ranging from life support and radiation protection to nuclear power and propulsion elements. A particularly promising technology is Nuclear-Thermal Propulsion (NTP), which has the potential to reduce transit times to Mars significantly. Instead of the usual one-way transit period of six to nine months, a working NTP system could reduce the travel time to between 100 and 45 days!
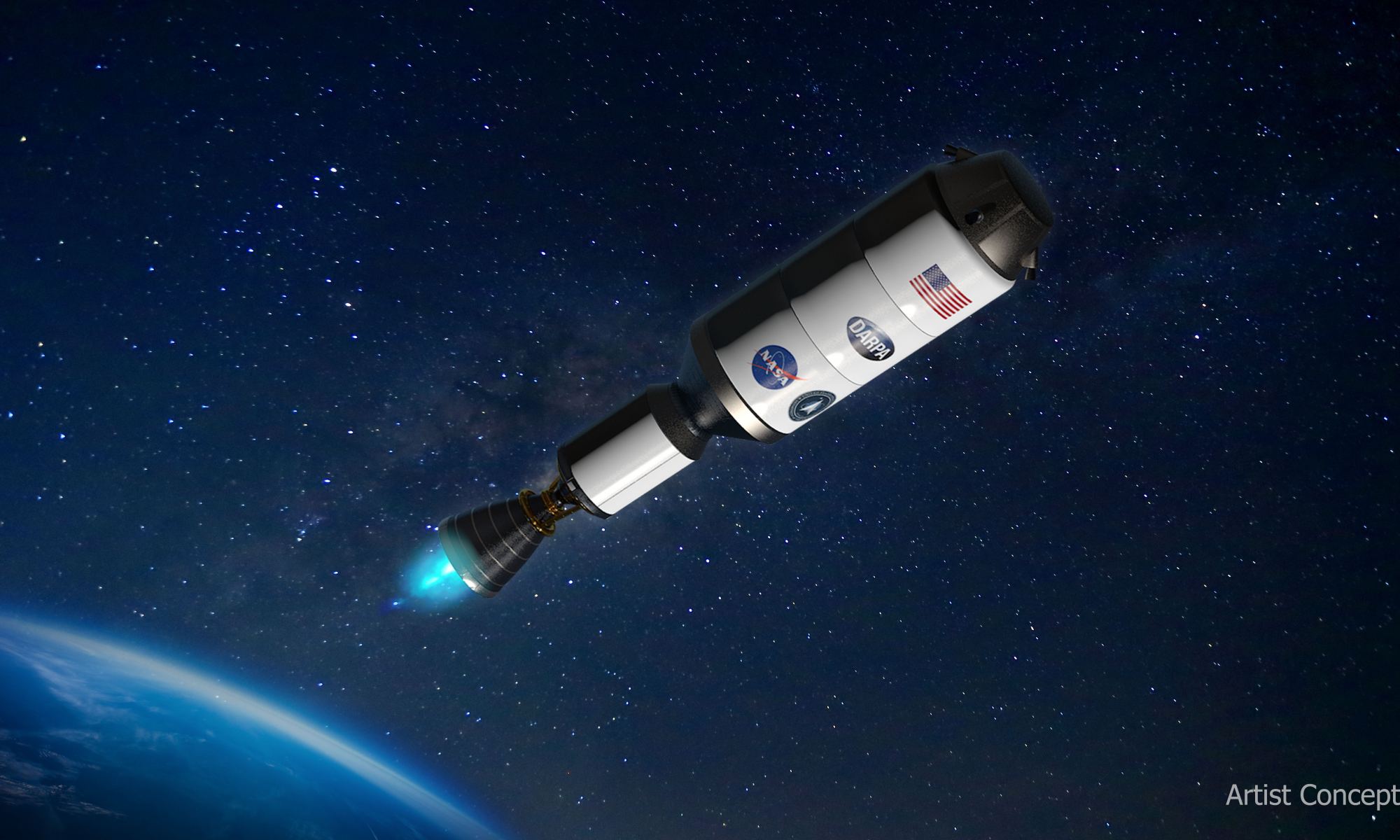
Artist concept of Demonstration for Rocket to Agile Cislunar Operations (DRACO) spacecraft, Credits: DARPA
The coming decades of space exploration will see astronauts return to the Moon, the first crewed missions to Mars, and robotic missions to the outer Solar System (among other things). These missions will leverage innovative technologies that allow faster transits, long-duration stays, and sustainable living far from Earth. To this end, NASA and other space agencies are investigating nuclear applications, especially where energy and propulsion are concerned. Many of these proposals have been on the books since the early space age and have been thoroughly validated.
On Tuesday, January 24th, NASA and the Defense Advanced Research Projects Agency (DARPA) announced they were launching an interagency agreement to develop a nuclear-thermal propulsion (NTP) concept. The proposed nuclear rocket is known as the Demonstration Rocket for Agile Cislunar Operations (DRACO), which would enable fast-transit missions to Mars (weeks instead of months). This three-phase program will culminate with a demonstration of the DRACO in orbit, which is expected to occur by early 2027.
America’s Defense Advanced Research Projects Agency (DARPA) is well known for its challenges. It held a series of autonomous driving competitions back in the early 2000s that directly led to today’s self-driving cars. Now that Grand Challenge has evolved into a new one – the Subterranean (SubT) challenge, which took place last week. This new one also happens to be directly applicable to technologies that would be useful in space exploration.
Artist's impression of a spaceplane that relies on the SABRE engine. Credit: Reaction Engines Ltd.
The UK aerospace company Reaction Engine Limited was founded in 1989 for the express purpose of creating engines that would lead to spaceplanes capable of horizontal take-off and landing (HOTOL). With support from the ESA, these efforts have resulted in the Synergetic Air-Breathing Rocket Engine (SABRE). Once complete, this system will combine elements of jet and rocket propulsion to achieve hypersonic speeds (Mach 5 to Mach 25).
Recently, Reaction Engines passed a major milestone with the development of their SABRE engine. As the company announced earlier this week (on Tues. Oct. 22nd), their engineers conducted a successful test of a vital component – the engine’s heat exchange element (aka. precooler). What’s more, the test involved airflow temperatures equivalent to speeds of Mach 5, which is in the hypersonic range.
NASA's R5 "Valkyrie" robot may become a regular part of future crewed missions to Mars and beyond. Credit: NASA/B. Stafford/J. Blair/R. Geeseman
For over a decade, robots have been exploring Mars in advance of the crewed missions that are being planned for the coming decades. And when it comes time for astronauts to set foot on the Red Planet, they will be looking for robots to help them with some of the legwork. After all, exploring Mars is tough, laborious, and dangerous work, so some robotic assistance will probably be necessary.
For this reason, back in November of 2015, NASA gave the Massachusetts Institute of Technology one of their R5 “Valkyrie” humanoid robots. Since that time, MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) has been developing special algorithms that will allow these robots to help out during future missions to Mars and beyond.
These efforts are being led Professor Russ Tedrake, an electrical engineer and computer programmer who helped program the Atlas robot to take part in the 2015 DARPA Robotics Challenge. Together with members of an advanced independent research group – known as the Super Undergraduate Research Opportunities Program (SuperUROP) – he is getting this R5 robot ready for NASA’s Space Robotics Challenge.
The DARPA Robotics Challenge (DRC) sought to inspire the creation of robots that could perform human tasks; in that case, for the sake of disaster relief. Credit: DARPA
As part of NASA’s Centennial Challenges Program, and with a prize purse of $1 million, this competition aims to push the boundaries of what robots are capable of in the realm of space exploration. In addition to MIT, Northeastern University and the University of Edinburgh have been tasked with programming an R5 to complete tasks normally handled by astronauts.
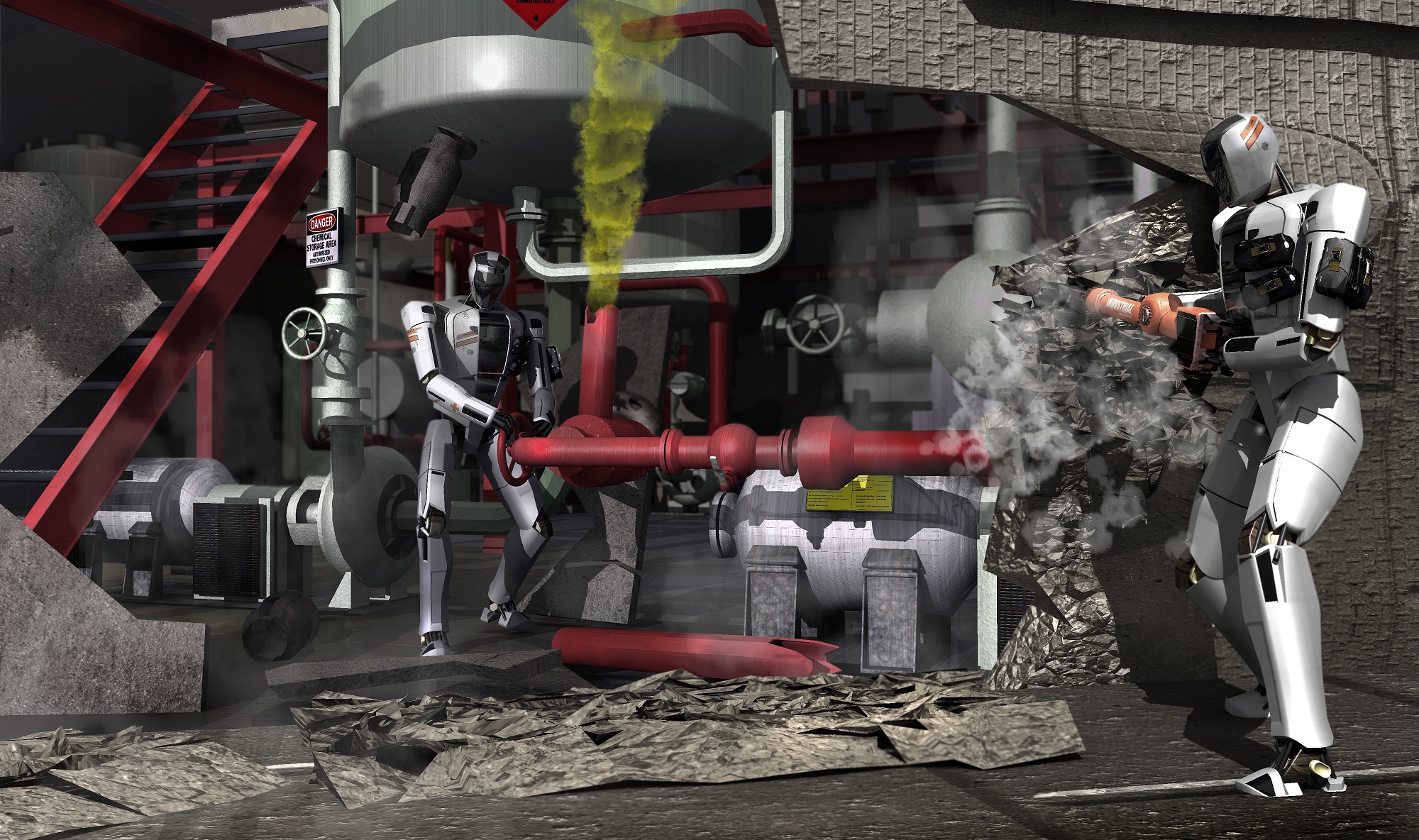
Ultimately, the robots will be tested in a simulated environment and judged based on their ability to complete three tasks. These include aligning a communications array, repairing a broken solar array, and identifying and repairing a habitat leak. There will also be a qualifying round where teams will be tasked with demonstrating autonomous tracking abilities (which will have to be completed in order to move towards the main round).
Naturally, this presents quite a few challenges. NASA designed the R5 robot to be capable of performing human tasks and move like a human being as much as possible, which necessitated a body with 28 torque-controlled joints. However, getting those joints to work together to perform mission-related work and operate independently is a bit of a challenge.
In short, the robot is not like other robotic missions – such as the Opportunity or Curiosity rovers. Instead of having a human being pushing levers to get them to move about and collect samples, the R5 will be tasked with things like opening airlock hatches, attaching and removing power cables, repairing equipment, and retrieving samples all on its own. And of course, if it takes a spill and falls down, it will have to be able to get up on its own.
NASA’s Space Robotics Challenge seeks to foster the development of robots that can help human astronauts during future missions, like to Mars. Credit: NASA/STMD
With the help of the special algorithms being generated by Tedrake and his colleagues – as well as other teams competing in this challenge – robots could play an important role in future missions. This could involve robots selecting landing sites for astronaut crews, setting up habitats in advance of crews arriving, and even conducting preliminary research on celestial bodies.
In addition, robots could take the place of crews on long-distance missions (such as Europa). Instead of sending a crew that would require months of food and supplies, a robot crew could be dispatched to the Jovian moon to collect ice samples, explore the surface, and interface with drones being sent to explore the interior ocean. And if the mission failed, there would be no grieving families (just grieving robotics teams).
And now to address the elephant in the room. The idea of sending robot explorers on space missions to help astronauts (or even replace them) is sure to make some people out there nervous. But for those who fear that this might bring one step closer to a robot revolution, rest assured that the machines are nowhere near where they’d need to be to go all “Judgement Day” on us just yet.
Long before they can launch nuclear weapons, pick up laser guns and stalk us through a post-apocalyptic landscape, or start upgrading themselves to look (and feel) human, robots will first need to master the simple tasks of walking upright and holding a screwdriver.
Still, if any of the robots end up having creepy red visor eyes (or saying things like “by your command”), we might want to consider including the Three Laws of Robotics in their programming. It’s never too soon to make sure they can’t turn on humanity!
Registration for the Space Robotics Challenge opened in August, 2016. The qualifying round, which began in mid-October, will run until mid-December. Finalists of that round will be announced in January, with the final virtual competition taking place in June 2017. The winning team will be awarded $500,000 over a two year period from NASA’s Space Technology Mission Directive.
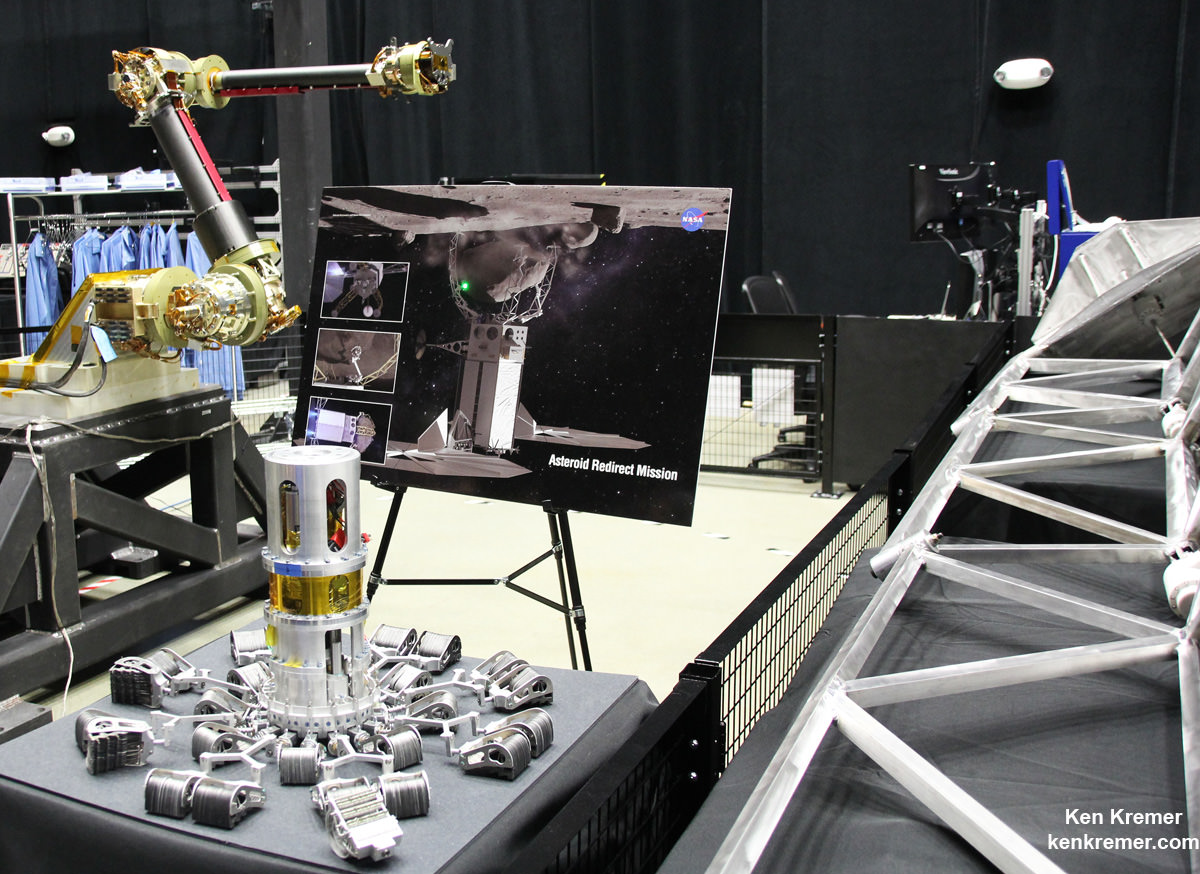
Robotic sampling arm and capture mechanism to collect a multi-ton boulder from an asteroid are under development at NASA Goddard and other agency centers for NASA’s unmanned Asteroid Redirect Vehicle and eventual docking in lunar orbit with Orion crew vehicle by the mid 2020s. Credit: Ken Kremer/kenkremer.com
NASA GODDARD SPACE FLIGHT CENTER, MD – Rigorous testing has begun on the advanced robotic arm and boulder extraction mechanisms that are key components of the unmanned probe at the heart of NASA’s Asteroid Redirect Robotic Mission (ARRM) now under development to pluck a multi-ton boulder off a near-Earth asteroid so that astronauts visiting later in an Orion crew capsule can harvest a large quantity of samples for high powered scientific analysis back on Earth. Universe Today inspected the robotic arm hardware utilizing “leveraged robotic technology” during an up close visit and exclusive interview with the engineering development team at NASA Goddard.
“The teams are making great progress on the capture mechanism that has been delivered to the robotics team at Goddard from Langley,” NASA Associate Administrator Robert Lightfoot told Universe Today.
“NASA is developing these common technologies for a suite of missions like satellite servicing and refueling in low Earth orbit as well as autonomously capturing an asteroid about 100 million miles away,” said Ben Reed, NASA Satellite Servicing Capabilities Office (SSCO) Deputy Project Manager, during an exclusive interview and hardware tour with Universe Today at NASA Goddard in Greenbelt, Maryland, regarding concepts and goals for the overall Asteroid Redirect Mission (ARM) initiative.
NASA is leveraging technology originally developed for satellite servicing such as with the Robotic Refueling Mission (RRM) currently on board the International Space Station(ISS) and repurposing them for the asteroid retrieval mission.
“Those are our two near term mission objectives that we are developing these technologies for,” Reed explained.
The unmanned Asteroid Redirect Robotic Mission (ARRM) to grab a boulder is the essential first step towards carrying out the follow on sample retrieval with the manned Orion Asteroid Redirect Mission (ARM) by the mid-2020s.
ARRM will use a pair of highly capable robotic arms to autonomously grapple a multi-ton (> 20 ton) boulder off the surface of a large near-Earth asteroid and transport it to a stable, astronaut accessible orbit around the Moon in cislunar space.
“Things are moving well. The teams have made really tremendous progress on the robotic arm and capture mechanism,” Bill Gerstenmaier, NASA Associate Administrator for Human Exploration and Operations, told Universe Today.
Then an Orion crew capsule can fly to it and the astronauts will collect a large quantity of rock samples and gather additional scientific measurements.
“We are working on a system to rendezvous, capture and service different [target] clients using the same technologies. That is what we are working on in a nut shell,” Reed said.
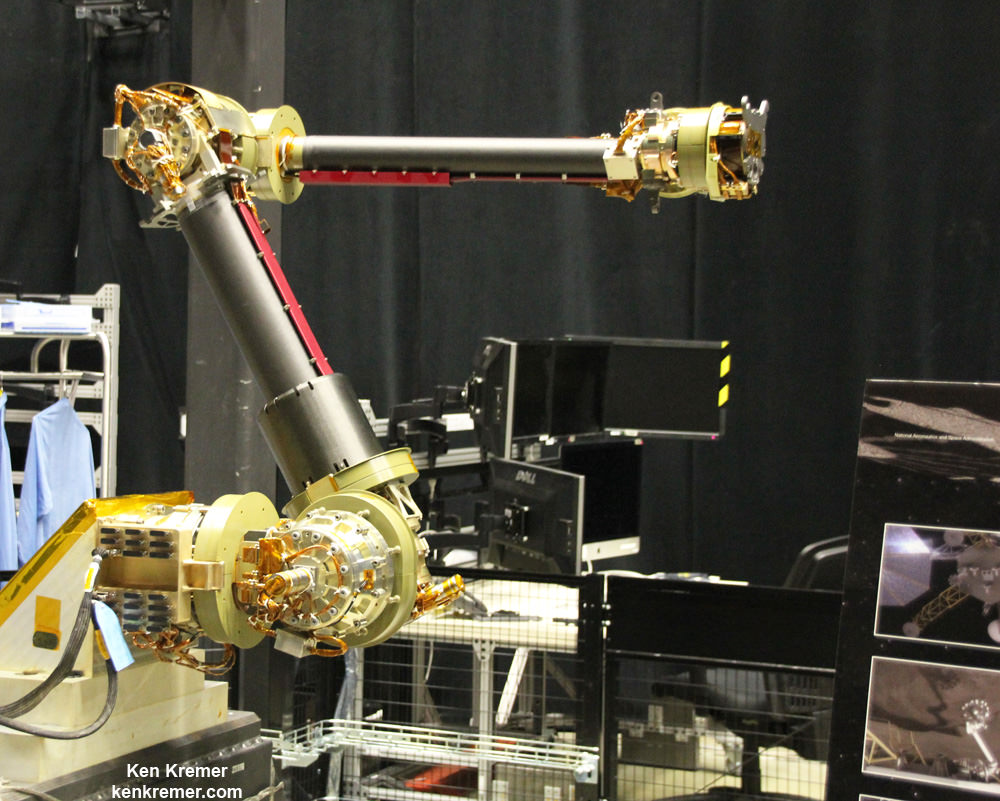
This engineering design unit of the robotic servicing arm is under development to autonomously extract a boulder off an asteroid for NASA’s asteroid retrieval mission and is being tested at NASA Goddard. It has seven degrees of freedom and mimics a human arm. Credit: Ken Kremer/kenkremer.com
“Right now the plan is to launch ARRM by about December 2020,” Reed told me. But a huge amount of preparatory work across the US is required to turn NASA’s plan into reality.
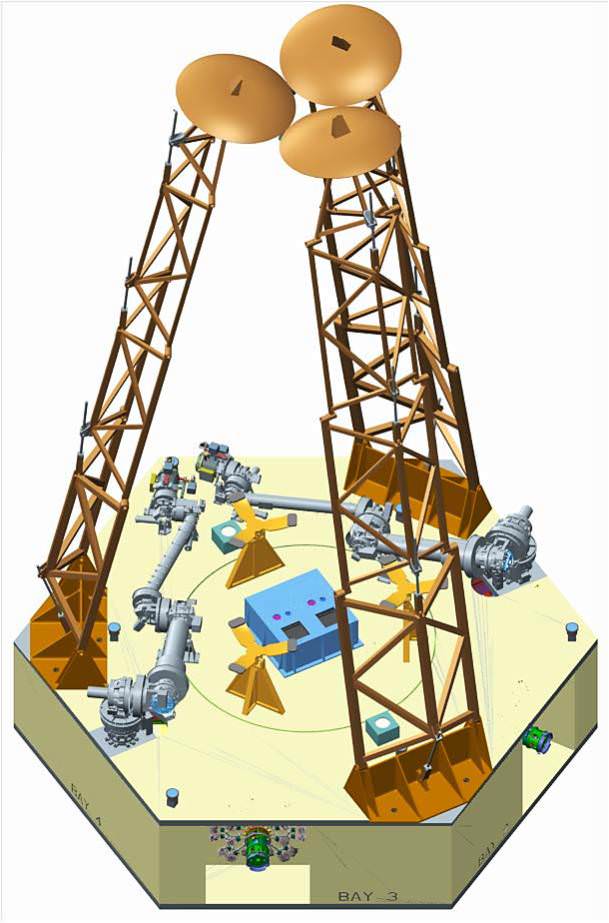
Key mission enabling technologies are being tested right now with a new full scale engineering model of the ‘Robotic Servicing Arm’ and a full scale mockup of the boulder snatching ARRM Capture Module at NASA Goddard, in a new facility known as “The Cauldron.”
Capture Module comprising two robotic servicing arms and three boulder grappling contact and restraint system legs for NASA’s Asteroid Redirect Robotic Mission (ARRM). Credit: NASAThe ARRM capture module is comprised of two shorter robotic arms (separated by 180 degrees) and three lengthy contact and restraint system capture legs (separated by 120 degrees) attached to a cradle with associated avionics, computers and electronics and the rest of the spacecraft and solar electric power arrays.
“The robotic arm we have here now is an engineering development unit. The 2.2 meter-long arms can be used for assembling large telescopes, repairing a failed satellite, removing orbital debris and capturing an asteroid,” said Reed.
“There are two little arms and three big capture legs.”
“So, we are leveraging one technology development program into multiple NASA objectives.”
“We are working on common technologies that can service a legacy orbiting satellite, not designed to be serviced, and use those same technologies with some tweaking that we can go out with 100 million miles and capture an asteroid and bring it back to the vicinity of the Moon.”
“Currently the [capture module] system can handle a boulder that’s up to about 3 x 4 x 5 meters in diameter.”
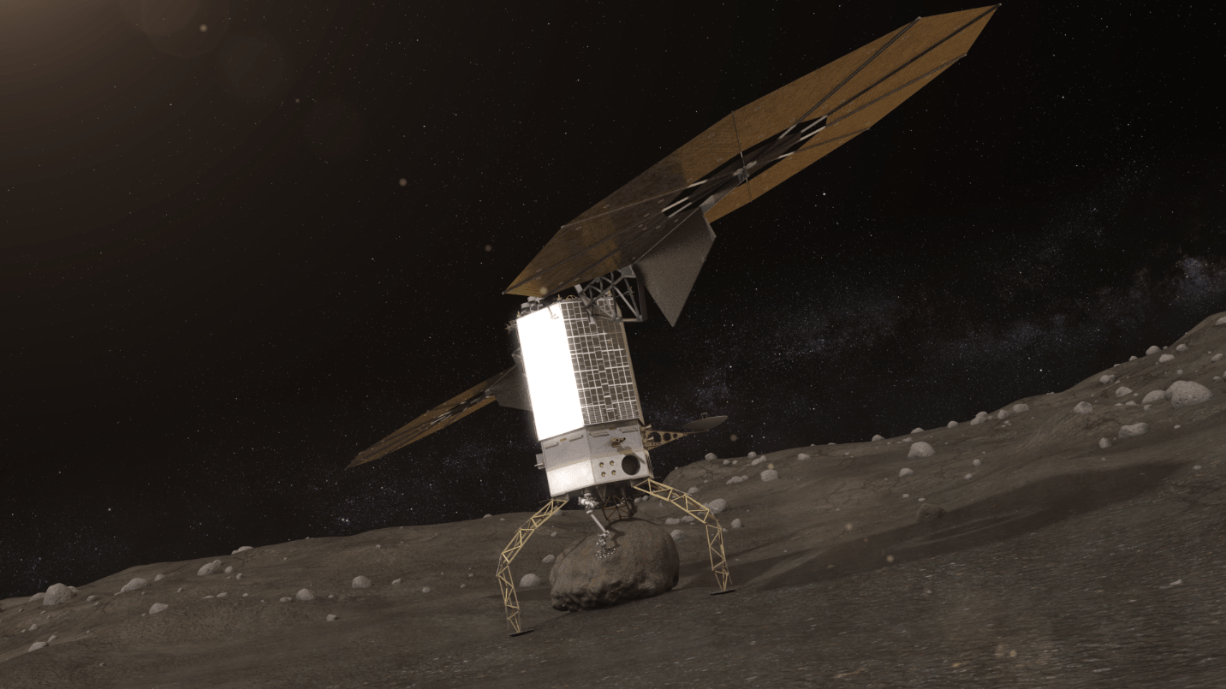
Artists concept of NASA’s Asteroid Redirect Robotic Mission capturing an asteroid boulder before redirecting it to a astronaut-accessible orbit around Earth’s moon. Credits: NASA
The Cauldron is a brand new Goddard facility for testing technologies and operations for multiple exploration and science missions, including satellite servicing and ARRM that just opened in June 2015 for the centers Satellite Servicing Capabilities Office.
Overall project lead for ARRM is the Jet Propulsion Laboratory (JPL) with numerous contributions from other NASA centers and industrial partners.
“This is an immersive development lab where we bring systems together and can do lifetime testing to simulate what’s in space. This is our robotic equivalent to the astronauts NBL, or neutral buoyancy lab,” Reed elaborated.
“So with this same robotic arm that can cut wires and thermal blankets and refuel an Earth sensing satellite, we can now have that same arm go out on a different mission and be able to travel out and pick up a multi-ton boulder and bring it back for astronauts to harvest samples from.”
“So that’s quite a technical feat!”
The Robotic Servicing Arm is a multi-jointed powerhouse designed to function like a “human arm” as much as possible. It builds on extensive prior research and development investment efforts conducted for NASA’s current Red Planetrovers and a flight-qualified robotic arm developed for the Defense Advanced Research Projects Agency (DARPA).
“The arm is capable of seven-degrees-of-freedom to mimic the full functionally of a human arm. It has heritage from the arm on Mars right now on Curiosity as well as ground based programs from DARPA,” Reed told me.
“It has three degrees of freedom at our shoulder, two at our elbow and two more at the wrist. So I can hold the hand still and move the elbow.”
The arm will also be equipped with a variety of interchangeable “hands” that are basically tools to carry out different tasks with the asteroid such as grappling, drilling, sample gathering, imaging and spectrometric analysis, etc.
View of the robotic arm above and gripper tool below that initially grabs the asteroid boulder before the capture legs wrap around as planned for NASA’s upcoming unmanned ARRM Asteroid Redirect Robotic Mission that will later dock with an Orion crew vehicle. Credit: Ken Kremer/kenkremer.com
The ARRM spacecraft will carefully study, characterize and photograph the asteroid in great detail for about a month before attempting the boulder capture.
Why does the arm need all this human-like capability?
“When we arrive at an asteroid that’s 100 million miles away, we are not going to know the fine local geometry until we arrive,” Reed explained to Universe Today.
“Therefore we need a flexible enough arm that can accommodate local geometries at the multi-foot scale. And then a gripper tool that can handle those geometry facets at a much smaller scale.”
“Therefore we chose seven-degrees-of-freedom to mimic humans very much by design. We also need seven-degrees-of-freedom to conduct collision avoidance maneuvers. You can’t do that with a six-degree-of-freedom arm. It has to be seven to be a general purpose arm.”
How will the ARRM capture module work to snatch the boulder off the asteroid?
“So the idea is you come to the mother asteroid and touch down and make contact on the surface. Then you hold that position and the two arms reach out and grab the boulder.”
“Once its grabbed the boulder, then the legs straighten and pull the boulder off the surface.”
“Then the arms nestle the asteroid onto a cradle. And the legs then change from a contact system to become a restraint system. So the legs wrap around the boulder to restrain it for the 100 million mile journey back home.
“After that the little arms can let go – because the legs have wrapped around and are holding the asteroid.”
“So now the arm can also let go of the gripper system and pick up a different tool to do other things. For example they can collect a sample with another tool. And maybe assist an astronaut after the crew arrives.”
“During the 100 million mile journey back to lunar orbit they can be also be preparing the surface and cutting into it for later sample collection by the astronauts.”
Be sure to watch this video animation:
Since the actual asteroid encounter will occur very far away, the boulder grappling will have to be done fully autonomously since there will be no possibility for real time communications.
“The return time for communications is like about 30 minutes. So ‘human in the loop’ control is out of the question.
“Once we get into hover position over the landing site we hit the GO button. Then it will be very much like at Mars and the seven minutes of terror. It will take awhile to find out if it worked.”
Therefore the team at Goddard has already spent years of effort and practice sessions just to get ready for working with the early engineering version of the arm to maximize the probability of a successful capture.
“In this facility we put systems together to try and practice and rehearse and simulate as much of the mission as is realistically possible.”
“It took a lot of effort to get to this point, in the neighborhood of four years to get the simulation to behave correctly in real time with contact dynamics and the robotic systems. So the arm has to touch the boulder with force torque sensors and feed that into a computer to measure that and move the actuators to respond accordingly.”
“So the capture of the boulder is autonomous. The rest is teleoperated from the ground, but not the capture itself.”
How realistic are the rehearsals?
“We are practicing here by reaching out with the arm to grasp the client target using autonomous capture [procedures]. In space the client [target] is floating and maybe tumbling. So when we reach out with the arm to practice autonomous capture we make the client tumble and move – with the inertial properties of the target we are practicing on.”
“Now for known objects like satellites we know the mass precisely. And we can program all that inertial property data in very accurately to give us much more realistic simulations.”
“We learned from all our astronaut servicing experiences in orbit is that the more we know for the simulations, the easier and better the results are for the astronauts during an actual mission because you simulated all the properties.”
“But with this robotic mission to an asteroid there is no backup like astronauts. So we want to practice here at Goddard and simulate the space environment.”
ARRM will launch by the end of 2020 on either an SLS, Delta IV Heavy or a Falcon Heavy. NASA has not yet chosen the launch vehicle.
Several candidate asteroids have already been discovered and NASA has an extensive ongoing program to find more.
Orion crew capsule docks to NASA’s asteroid redirect vehicle grappling captured asteroid boulder orbiting the Moon. Credit: NASA
Again, this robotic technology was selected for development for ARRM because it has a lot in common with other objectives like fixing communications satellites, refueling satellites and building large telescopes in the future.
NASA is also developing other critical enabling technologies for the entire ARM project like solar electric propulsion that will be the subject of another article.
Therefore NASA is leveraging one technology development program into multiple spaceflight objectives that will greatly assist its plans to send ‘Humans to Mars’ in the 2030s with the Orion crew module launched by the monster Space Launch System (SLS) rocket.
The maiden uncrewed launch of the Orion/SLS stack is slated for November 2018.
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
At NASA Goddard robotics lab Ben Reed/NASA Satellite Servicing Capabilities Office (SSCO) Deputy Project Manager and Ken Kremer/Universe Today discuss the robotic servicing arm and asteroid boulder capture mechanism being tested for NASA’s upcoming unmanned ARRM Asteroid Redirect Robotic Mission that will dock with an Orion crew vehicle in lunar orbit by the mid 2020s for sample return collection. Credit: Ken Kremer/kenkremer.com
Artist's impression of the ALASA being deployed by a USAF fighter jet.
Credit: DARPA
For decades, the human race has been deploying satellites into orbit. And in all that time, the method has remained the same – a satellite is placed aboard a booster rocket which is then launched from a limited number of fixed ground facilities with limited slots available. This process not only requires a month or more of preparation, it requires years of planning and costs upwards of millions of dollars.
On top of all that, fixed launch sites are limited in terms of the timing and direction of orbits they can establish, and launches can be delayed by things as simple as bad weather. As such, DARPA has been working towards a new method of satellite deployment, one which eliminates rockets altogether. It’s known as the Airborne Launch Assist Space Access (ALASA), a concept which could turn any airstrip into a spaceport and significantly reduce the cost of deploying satellites.
What ALASA comes down to is a cheap, expendable dispatch launch vehicle that can be mounted onto the underside of an aircraft, flown to a high altitude, and then launched from the craft into low earth orbit. By using the aircraft as a first-stage, satellite deployment will not only become much cheaper, but much more flexible.
DARPA’s aim in creating ALASA was to ensure a three-fold decrease in launch costs, but also to create a system that could carry payloads of up to 45 kg (100 lbs) into orbit with as little as 24 hours’ notice. Currently, small satellite payloads cost roughly $66,000 a kilogram ($30,000 per pound) to launch, and payloads often must share a launcher. ALASA seeks to bring that down to a total of $1 million per launch, and to ensure that satellites can be deployed more precisely.
Artist’s concept of the ALASA second stage firing. Credit: DARPA
News of the agency’s progress towards this was made at the 18th Annual Commercial Space Transportation Conference (Feb 4th and 5th) in Washington, DC. Bradford Tousley, the director of DARPA’s Tactical Technology Office, reported on the progress of the agency’s program, claiming that they had successfully completed phase one, which resulted in three viable system designs.
Phase two – which began in March of 2014 when DARPA awarded Boeing the prime contract for development – will consist of DARPA incorporating commercial-grade avionics and advanced composites into the design. Once this is complete, it will involve launch tests that will gauge the launch vehicle’s ability to deploy satellites to desired locations.
“We’ve made good progress so far toward ALASA’s ambitious goal of propelling 100-pound satellites into low earth orbit (LEO) within 24 hours of call-up, all for less than $1 million per launch,” said Tousley in an official statement. “We’re moving ahead with rigorous testing of new technologies that we hope one day could enable revolutionary satellite launch systems that provide more affordable, routine and reliable access to space.”
These technologies include the use of a high-energy monopropellant, where fuel and oxidizer are combined into a single liquid. This technology, which is still largely experimental, will also cut the costs associated with satellite launches by both simplifying engine design and reducing the cost of engine manufacture and operation.
Artist’s concept of the ALASA vehicle deploying into orbit. Credit: DARPA
Also, the ability to launch satellites from runways instead of fixed launch sites presents all kinds of advantages. At present, the Department of Defense (DoD) and other government agencies require scheduling years in advance because the number of slots and locations are very limited. This slow, expensive process is causing a bottleneck when it comes to deploying essential space assets, and is also inhibiting the pace of scientific research and commercial interests in space.
“ALASA seeks to overcome the limitations of current launch systems by streamlining design and manufacturing and leveraging the flexibility and re-usability of an air-launched system,” said Mitchell Burnside Clapp, DARPA program manager for ALASA. “We envision an alternative to ride-sharing for satellites that enables satellite owners to launch payloads from any location into orbits of their choosing, on schedules of their choosing, on a launch vehicle designed specifically for small payloads.”
The program began in earnest in 2011, with the agency conducting initial trade studies and market/business case analysis. In November of that same year, development began with both system designs and the development of the engine and propellant technologies. Phase 2 is planned to last late into 2015, with the agency conducting tests of both the vehicle and the monopropellant.
Pending a successful run, the program plan includes 12 orbital launches to test the integrated ALASA prototype system – which is slated to take place in the first half of 2016. Depending on test results, the program would conduct up to 11 further demonstration launches through the summer of 2016. If all goes as planned, ALASA would provide convenient, cost-effective launch capabilities for the growing government and commercial markets for small satellites, which are currently the fastest-growing segment of the space launch industry.
And be sure to check out this concept video of the ALASA, courtesy of DARPA:
Concept images for DARPA’s Experimental Spaceplane (XS-1) program. Credit: DARPA.
The Defense Advanced Research Projects Agency (DARPA) is looking to develop a fully-reusable unmanned spaceplane, and they are now ready to start working their proposed Experimental Spaceplane (XS-1). The agency has put together a “special forces” of sorts in the space industry, awarding prime contracts for the first phase of development to a combination of six companies. These six are a combination of “old” and “new” space companies and are:
The Boeing Company (working with Blue Origin, LLC)
Masten Space Systems (working with XCOR Aerospace)
Northrop Grumman Corporation (working with Virgin Galactic)
“We chose performers who could prudently integrate existing and up-and-coming technologies and operations, while making XS-1 as reliable, easy-to-use and cost-effective as possible,” Jess Sponable, DARPA program manager. “We’re eager to see how their initial designs envision making spaceflight commonplace—with all the potential military, civilian and commercial benefits that capability would provide.”
Each commercial entity will be able to outline their vision of the XS-1, but DARPA wants the the spaceplane to provide aircraft-like access to space for deploying small satellites to orbit and it its development, they’d like to create technology for next-generation hypersonic vehicles, — and do it more affordably.
They envision that a reusable first stage would fly to hypersonic speeds at a suborbital altitude. Then, one or more expendable upper stages would separate and deploy a satellite into low Earth orbit (LEO). The reusable first stage would then return to earth, land and be prepared for the next flight.
Key to the development, DARPA says, are modular components, durable thermal protection systems and automatic launch, flight and recovery systems that should significantly reduce logistical needs, enabling rapid turnaround between flights.
DARPA’s key technical goals for the XS-1 include flying 10 times in 10 days, flying to Mach 10+ at least once and launching a representative small payload to orbit. The program also seeks to reduce the cost of access to space for 3,000- to 5,000-pound payloads to less than $5 million per flight.
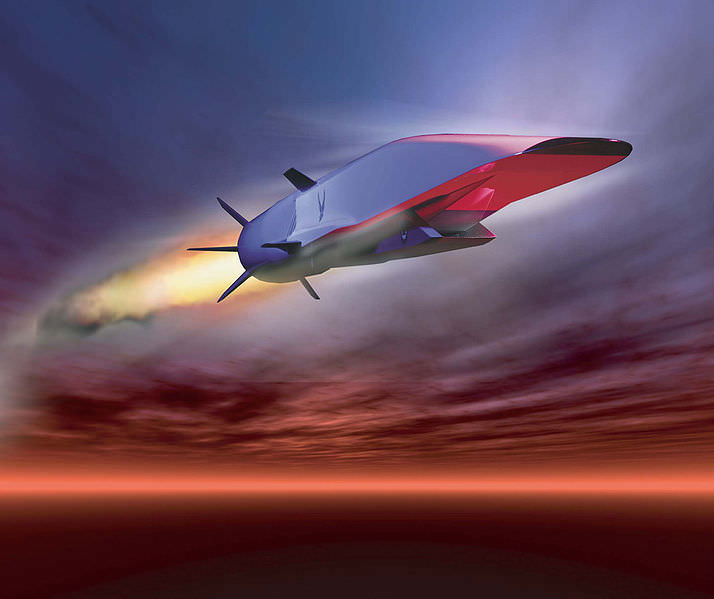
Artists concept of the X-51A Waverider. Credit: US Air Force
[/caption]
A highly anticipated test flight of the X-51A Waverider scramjet ended abruptly after the experimental aircraft suffered a control failure and broke apart during an attempt to fly at six times the speed of sound. The test flight took place off the coast of California and the X-51A was dropped from a B-52 bomber, but an US Air Force spokesman said that a faulty control fin prevented it from starting its unique “airbreathing” scramjet engine.
The X-51 Waverider program is a cooperative effort of the Air Force, DARPA, NASA, Boeing and Pratt & Whitney Rocketdyne. The Air Force is hoping this type of technology would be successful enough to eventually be used for more efficient transport of payloads into orbit and the Pentagon has touted its ability to deliver strikes around the globe within minutes.
The craft was carried to about 15,240 meters (50,000 ft.) by a B-52 from Edwards Air Force Base in California, and was dropped over the Pacific Ocean. Designers were hoping the Waverider would reach Mach 6 or more.
The scramjet (short for “supersonic combustion ramjet”) is an air-breathing engine, where intake air blows through its combustion chamber at supersonic speeds. The engine has no moving parts, and the oxygen needed by the engine to combust is taken from the atmosphere passing through the vehicle, instead of from a tank onboard, making the craft smaller, lighter and faster. Some designers have predicted it could reach speeds of anywhere from Mach 12 to Mach 24. Mach 24 is more than 29,000 km/hour (18,000 miles per hour.) This could cut an 18-hour trip to Tokyo from New York City to less than 2 hours.
But the concept has had limited success.
In May 2010, the first test of the vehicle had sort of a “successful” flight of 200 seconds of autonomous flight, which set a duration record for an aircraft powered by a scramjet engine. However, another test in 2011 failed, which was attributed to another design flaw.
A statement put out by the Air force said officials will conduct a rigorous evaluation of the test to assess all the factors behind the failure.