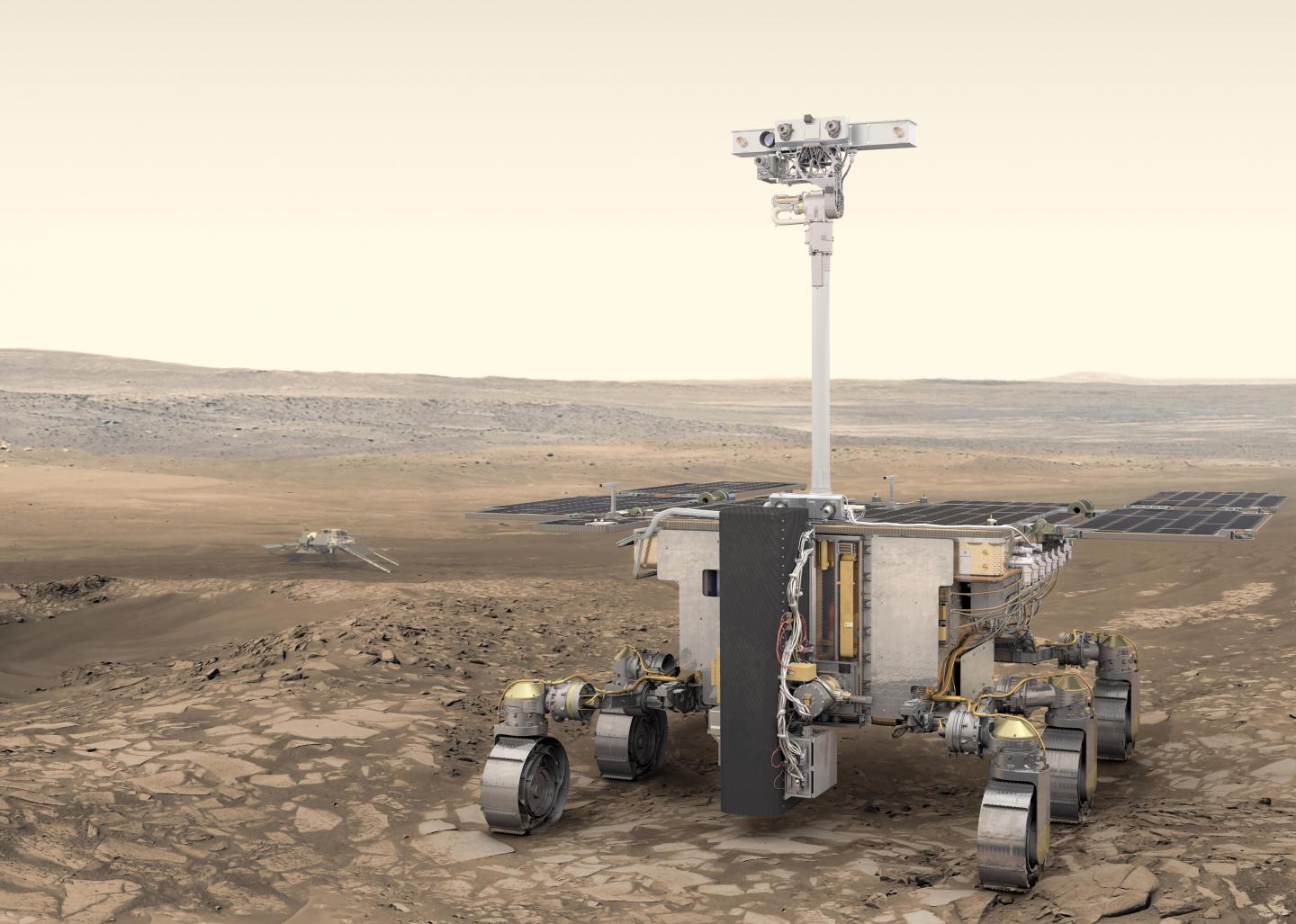
This screenshot from an animation shows the Rosalind Franklin rover's drill about to pierce the Martian surface. The rover can drill two meters deep and collect samples. Image Credit: ESA
Russia’s attack on Ukraine has delayed its launch, but the ESA’s Rosalind Franklin rover is heading toward completion. It was originally scheduled to launch in 2018, but technical delays prevented it. Now, after dropping Russia from the project because of their invasion, the ESA says it won’t launch before 2028.
But when it does launch and then land on Mars, it will do something no other rover has done: drill down two meters into Mars and collect samples.
NASA’s Curiosity rover raised robotic arm with drill pointed skyward while exploring Vera Rubin Ridge at the base of Mount Sharp inside Gale Crater - backdropped by distant crater rim. This navcam camera mosaic was stitched from raw images taken on Sol 1833, Oct. 2, 2017 and colorized. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Humans have been digging underground for millennia – on the Earth. It’s where we extract some of our most valuable resources that have moved society forward. For example, there wouldn’t have been a Bronze Age without tin and copper – both of which are primarily found under the ground. But when digging under the ground on celestial bodies, we’ve had a much rougher time. That is going to have to change if we ever hope to utilize the potential resources that are available under the surface. A paper from Dariusz Knez and Mitra Kahlilidermani of the University of Krakow looks at why it’s so hard to drill in space – and what we might do about it.
An artist's illustration of the ExoMars/Rosalind Franklin rover on Mars. Image Credit: ESA/ATG medialab
The ExoMars Rover mission is back on track for its mission to Mars, but Russia won’t be a part of it this time. Following Russia’s disastrous invasion of neighbouring Ukraine in February 2022, the ESA suspended the ExoMars program.
Now, the mission is targeted for a 2028 launch to Mars without Russian involvement. In anticipation of that launch date, the ESA is busy testing the Rosalind Franklin rover and its mission-defining drill.
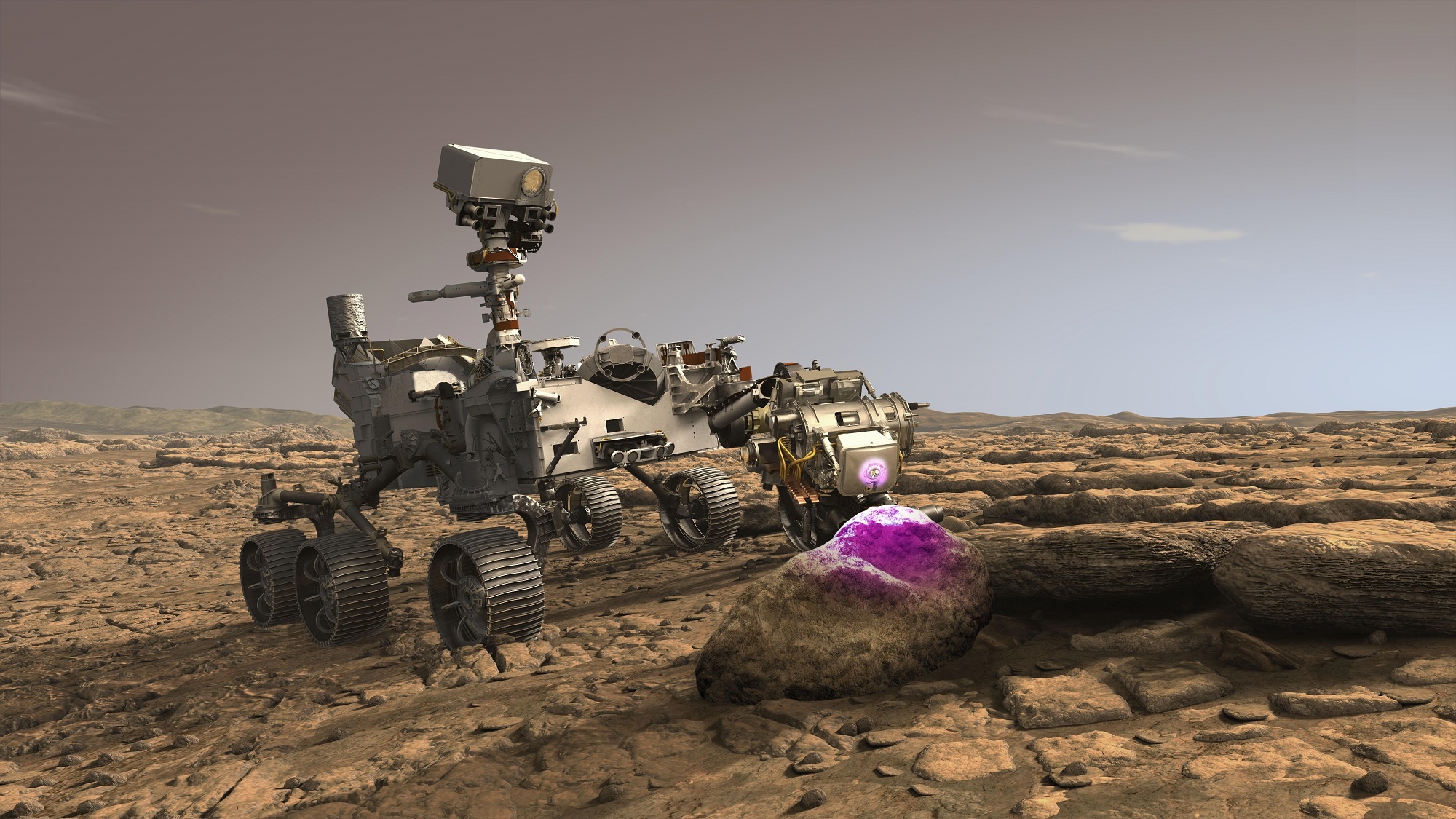
When it landed on Mars in February of 2021, the Perseverance rover joined a small armada of robotic explorers working hard to characterize Mars’ environment and atmosphere and determine if it ever supported life. But unlike its predecessors, one of the key objectives of the rover is to obtain samples of Martian soil and rock, which it will leave in a cache for later retrieval by a joint NASA-ESA mission.
This will be the first sample return from Mars, and the analysis of these samples will provide new insight into the geological and environmental evolution of Mars. The first attempt to obtain a sample didn’t go so well, with the sample crumbling before it was placed in the cache. Undeterred, the science team moved onto the next site and prepared to try again. A few days ago, NASA confirmed that the rover succeeded in its second attempt and has the pictures to prove it!
Over the past few weeks, there was quite a bit of excitement in the air at the NASA Jet Propulsion Laboratory in Pasadena, California, where mission controllers were prepping the Perseverance rover to acquire its first sample from the Martian surface. This mission milestone would be the culmination of years of hard work by a team of over 90 dedicated scientists and engineers.
The commands to commence operations to take its first sample (from drill site Roubion) were sent to the rover on Sol 164 (Thurs, Aug. 5th). On the morning of Friday, Aug. 6th, the team gathered to witness the sampling data come in. Everything appeared to be fine until they were notified a few hours later that the sample tube was empty! Since then, the rover’s science and engineering teams have been investigating what could have become of the sample.
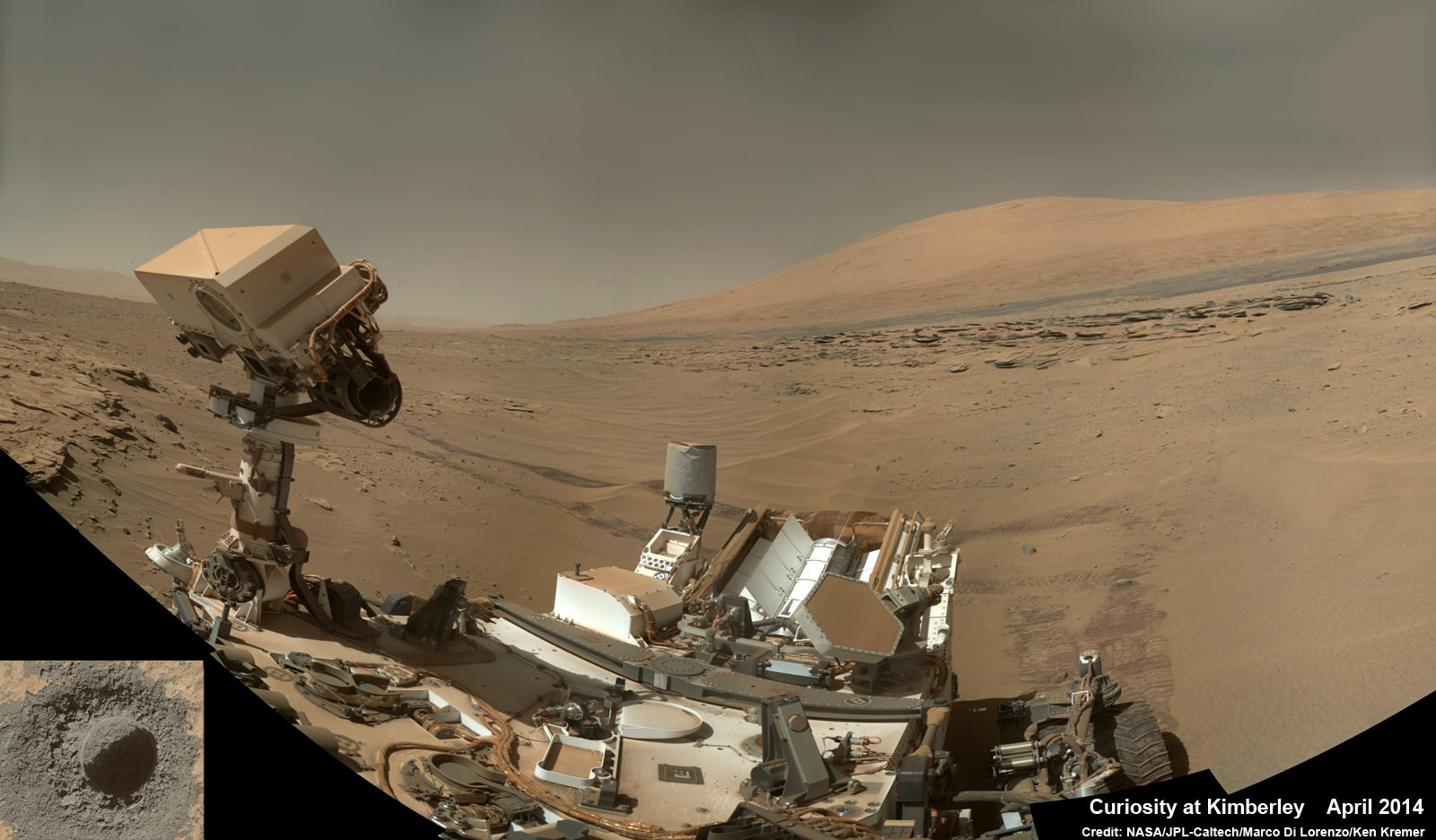
Curiosity snaps selfie at Kimberley waypoint with towering Mount Sharp backdrop on April 27, 2014 (Sol 613). Inset shows MAHLI camera image of rovers mini-drill test operation on April 29, 2014 (Sol 615) into “Windjama” rock target at Mount Remarkable butte. MAHLI color photo mosaic assembled from raw images snapped on Sol 613, April 27, 2014. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer - kenkremer.com
Curiosity snaps selfie at Kimberley waypoint with towering Mount Sharp backdrop on April 27, 2014 (Sol 613). Inset shows MAHLI camera image of rovers mini-drill test operation on April 29, 2014 (Sol 615) into “Windjana” rock target at Mount Remarkable butte. MAHLI color photo mosaic assembled from raw images snapped on Sol 613, April 27, 2014. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer – kenkremer.com See more Curiosity photo mosaics below[/caption]
The answer has come Fast and Furious – “Drill, Baby, Drill !”
After spending the weekend inspecting an enticing slab of sandstone rock at “Kimberley”, the team directed NASA’s Curiosity rover to bore a test hole into a Martian rock target called “Windjana” on Tuesday, April 29, Sol 615, that exhibited interesting bumpy textures. See above our illustrative “Kimberley” photo mosaic.
“A decision about full drilling is planned in coming days,” NASA JPL press officer Guy Webster told me today.
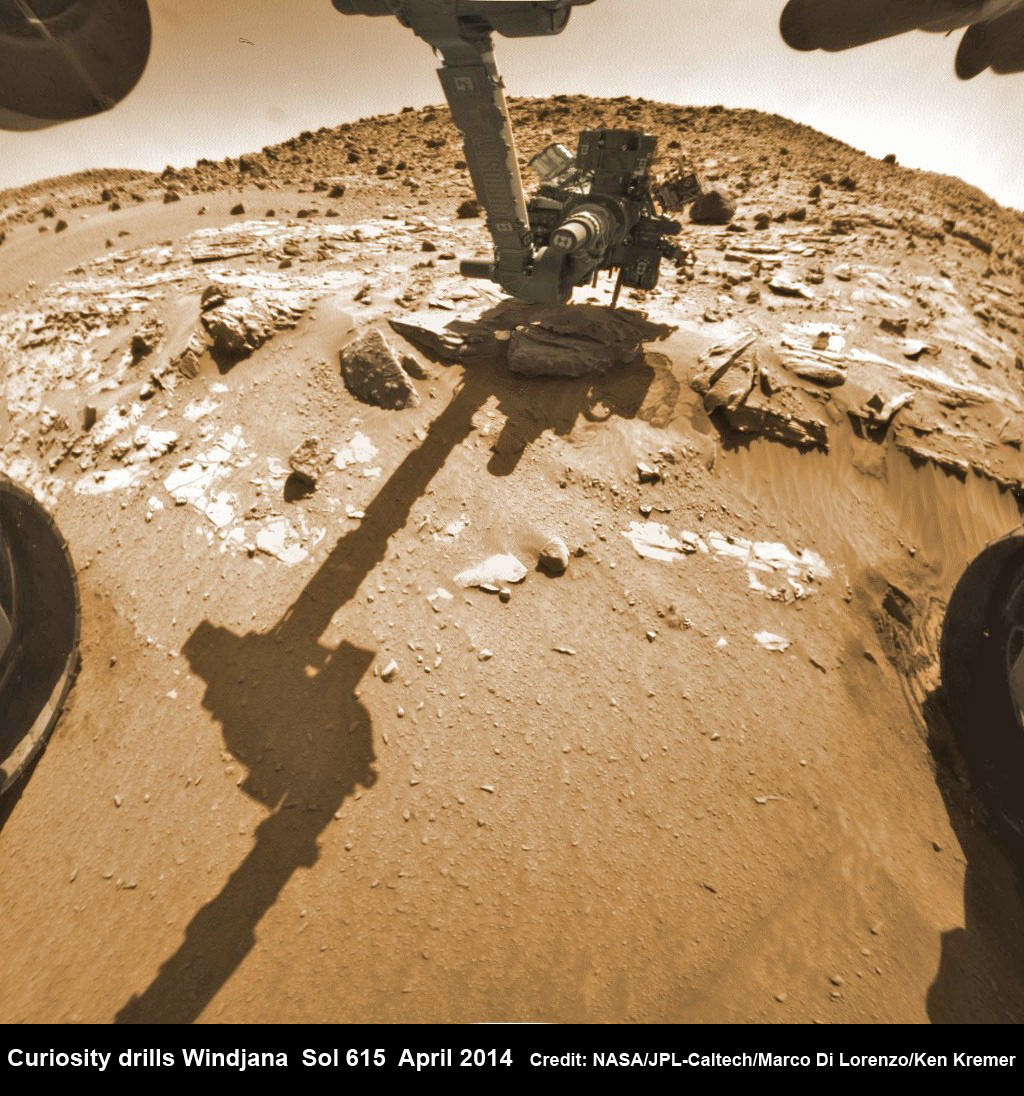
Hazcam fisheye camera image shows Curiosity drilling into “Windjana” rock target on April 29, 2014 (Sol 615). Flattened and colorized image shows Mount Remarkable butte backdrop. Credit: NASA/JPL/Marco Di Lorenzo/Ken Kremer – kenkremer.com
Engineers commanded Curiosity to perform the so called “mini-drill” operation at “Windjana”- as the site of the robots third drilling operation since touching down on the Red Planet back in August 2012.
The 1 ton robot drilled a test hole 0.63 inch (1.6 centimeters) in diameter and to a depth of about 0.8 inch (2 centimeters) using the hammering drill at the terminus of the robotic arm.
Windjana is an outcrop of sandstone located at the base of a Martian butte named Mount Remarkable at “The “Kimberley” waypoint – a science stopping point reached by the rover in early April 2014 along its epic trek to towering Mount Sharp, the primary destination of the mission.
See our photo mosaics illustrating Curiosity’s science activities and drilling operations on “Windjana” and roving around the “Mount Remarkable” butte at “The Kimberley Waypoint” – above and below – by the image processing team of Marco Di Lorenzo and Ken Kremer.
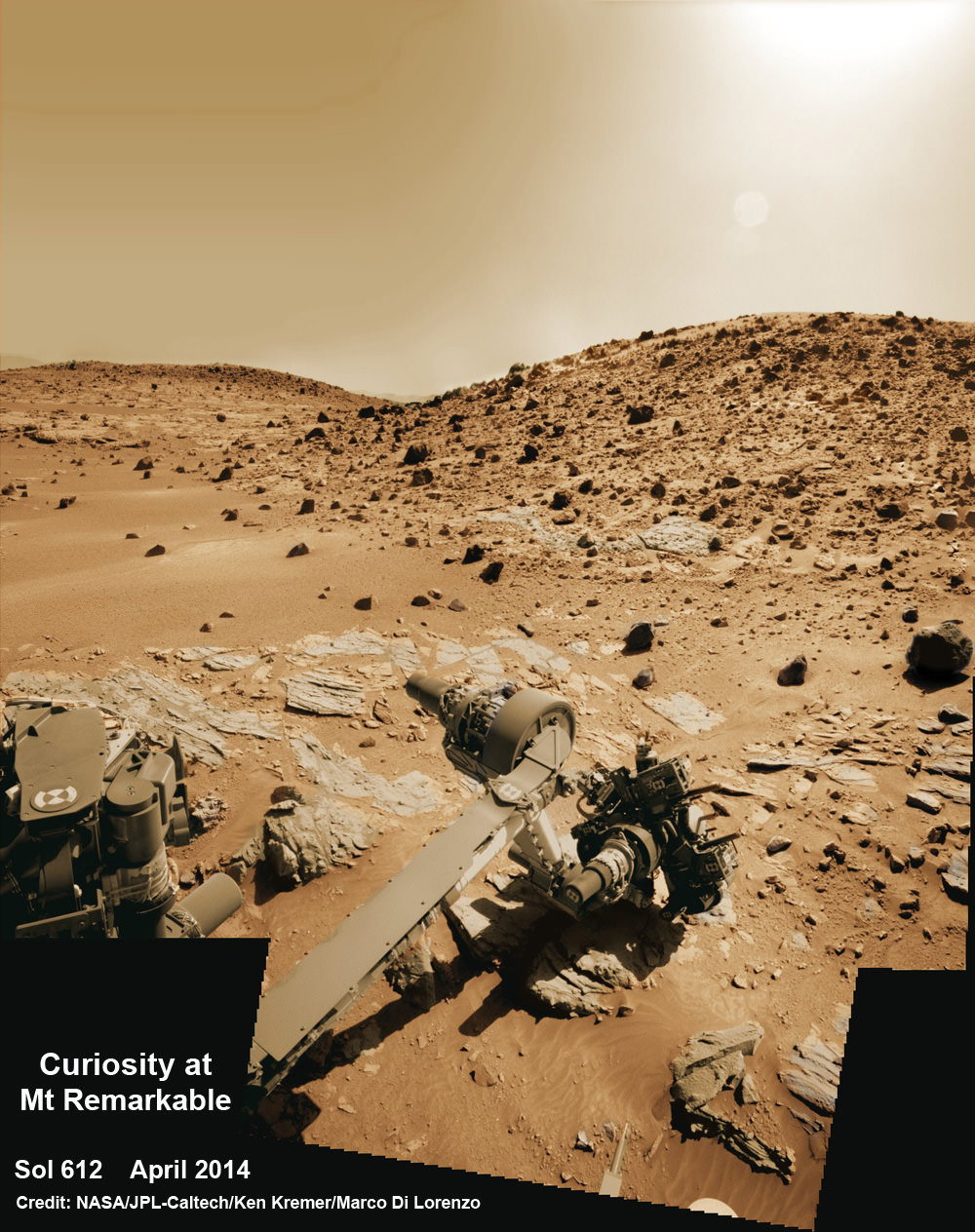
Multisol composite photo mosaic shows deployment of Curiosity’s rovers robotic arm and APXS X-ray spectrometer onto the ‘Winjana’ rock target at Mount Remarkable for evaluation as missions third drill target inside Gale Crater on Mars. The colorized navcam raw images were stitched together from several Martian days up to Sol 612, April 26, 2014. Credit: NASA/JPL-Caltech/Ken Kremer – kenkremer.com/Marco Di Lorenzo
The team is evaluating the resulting hole and powdery, gray colored tailings with the arm’s high resolution MAHLI camera and other instruments to determine whether to follow up with a deep drilling operation to a depth of 2.5 inches (6.4 centimeters).
To prepare for the “mini drill” operation, Curiosity first brushed the candidate drill site off with the wire-bristle Dust Removal Tool (DRT) this past weekend, to clear away obscuring Red Planet dirt and dust hindering observations with the cameras and spectrometers.
“In the brushed spot, we can see that the rock is fine-grained, its true color is much grayer than the surface dust, and some portions of the rock are harder than others, creating the interesting bumpy textures,” said Curiosity science team member Melissa Rice of the California Institute of Technology, Pasadena., in a NASA statement
“All of these traits reinforce our interest in drilling here in order understand the chemistry of the fluids that bound these grains together to form the rock.”
“Windjana,” is named after a gorge in Western Australia.
Curiosity’s Panoramic view of Mount Remarkable at ‘The Kimberley Waypoint’ where rover will conduct 3rd drilling campaign inside Gale Crater on Mars. The navcam raw images were taken on Sol 603, April 17, 2014, stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer – kenkremer.com/Marco Di Lorenzo
Why was Kimberley chosen as a science destination ?
“The Kimberley” has interesting, complex stratigraphy,” Curiosity Principal Investigator John Grotzinger, of the California Institute of Technology, Pasadena, told me.
If the team decides that Windjana meets the required criteria, Curiosity will bore a full depth hole into the sandstone rock, and then pulverize and filter it prior to delivery to the two onboard miniaturized chemistry labs – SAM and CheMin.
Windjana would be the first sandstone drill target, if selected. The first two drill locations at ‘John Klein’ and ‘Cumberland’ inside Yellowknife Bay were mudstone.
Curiosity departed the ancient lakebed at the Yellowknife Bay region in July 2013 where she discovered a habitable zone with the key chemical elements and a chemical energy source that could have supported microbial life billions of years ago – and thereby accomplished the primary goal of the mission. Curiosity scans scientifically intriguing rock outcrops of gorgeous Martian terrain at ‘The Kimberley’ waypoint in search of next drilling location beside Mount Remarkable butte, at right. Mastcam color photo mosaic assembled from raw images snapped on Sol 590, April 4, 2014. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer – kenkremer.com
Stay tuned here for Ken’s continuing Curiosity, Opportunity, Chang’e-3, SpaceX, Orbital Sciences, LADEE, MAVEN, MOM, Mars and more planetary and human spaceflight news.
Ken Kremer Curiosity Mars rover captured this panoramic view of a butte called “Mount Remarkable” and surrounding outcrops at “The Kimberley ” waypoint on April 11, 2014, Sol 597. Colorized navcam photomosaic was stitched by Marco Di Lorenzo and Ken Kremer. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer – kenkremer.com