Back in 2007, I talked with Rob Manning, engineer extraordinaire at the Jet Propulsion Laboratory, and he told me something shocking. Even though he had successfully led the entry, descent, and landing (EDL) teams for three Mars rover missions, he said the prospect of landing a human mission on the Red Planet might be impossible.
But now, after nearly 20 years of work and research — as well as more successful Mars rover landings — Manning says the outlook has vastly improved.
“We’ve made huge progress since 2007,” Manning told me when we chatted a few weeks ago in 2024. “It’s interesting how its evolved, but the fundamental challenges we had in 2007 haven’t gone away, they’ve just morphed.”
This image of the Perseverance rover's parachute and backshell was taken by the Ingenuity helicopter during its 26th flight on April 22, 2022. Credit: NASA/JPL/Caltech
But now, the incredible Ingenuity helicopter has snapped better images of those items, while it was hovering in the Martian air during its 26th flight.
And what a mess! The poor backshell crashed to the surface, splitting into pieces.
NASA's Mars Perseverance rover acquired this image of the area in front of it using its onboard Front Left Hazard Avoidance Camera A. This image was acquired on Feb. 18, 2021 (Sol 0) at the local mean solar time of 20:58:24. Credit: NASA/JPL-Caltech
They’ve done it again. After a journey of nearly seven months for the Perseverance rover, the Navigation and Entry, Descent and Landing teams successfully guided their intrepid traveler to a pinpoint landing inside Jezero Crater on Mars on February 18, 2021.
And within minutes of the landing, Perseverance sent back two images from the front and rear Hazard Avoidance Cameras, revealing its surroundings on the Red Planet.
Deceleration of Mars Science Laboratory in Martian Atmosphere. Artist's Concept depicts the interaction of NASA's Mars Science Laboratory spacecraft with the upper atmosphere of Mars during the entry, descent and landing (EDL) of the Curiosity rover onto the Martian surface. EDL begins when the spacecraft reaches the top of Martian atmosphere, about 81 miles (131 kilometers) above the surface of the Gale crater landing area, and ends with the rover safe and sound on the surface of Mars some 7 minutes later. During EDL, the spacecraft decelerates from a velocity of about 13,200 miles per hour (5,900 meters per second) at the top of the atmosphere, to stationary on the surface. Credit: NASA/JPL-Caltech
In the coming decades, a number of missions are planned for Mars, which include proposals to send astronauts there for the first time. This presents numerous logistical and technical challenges, ranging from the sheer distance to the need for increased protection against radiation. At the same time, there is also the difficulty of landing on the Red Planet, or what is referred to as the “Mars Curse“.
To complicate matters more, the size and mass of future missions (especially crewed spacecraft) will be beyond the capacity of current entry, descent, and landing (EDL) technology. To address this, a team of aerospace scientists released a study that shows how a trade-off between lower-altitude braking thrust and flight-path angle could allow for heavy missions to safely land on Mars.
Artist's impression of the InSight Lander commencing its entry, descent and landing (EDL) phase to Mars. Credit: NASA
On of May 5th, 2018, NASA’s Interior Exploration using Seismic Investigations, Geodesy and Heat Transport (InSight) lander launched from Vandenburg Air Force Base atop an Atlas V rocket. Over the next seven months, the mission traveled some 458 million km (300 mi) to Mars for the sake of studying its deep interior and learn how this planet – and all the other terrestrial planets of the Solar System (like Earth) – formed.
At 11:47 am PST (2:47 pm EST), after a seven month journey, NASA’s InSight Lander entered the Martian atmosphere to begin the entry, descent and landing (EDL) phase of its mission. Over the course of the next five minutes, the mission controllers at NASA-JPL watched eagerly as the spacecraft went through the careful process of conducting a textbook landing.
According to a new study, EDLS hardware that has been jettisoned on Mars could create problems for future missions to the same landing sites. Credit: NASA
One of the most common features of space exploration has been the use of disposable components to get missions to where they are going. Whether we are talking about multistage rockets (which fall away as soon as they are spent) or the hardware used to achieve Entry, Descent and Landing (EDL) onto a planet, the idea has been the same. Once the delivery mechanism is used up, it is cast away.
However, in so doing, we could be creating a hazardous situation for future missions. Such is the conclusion reached by a new study from the Finnish Meteorological Institute in Helsinki, Finland. With regard to the use of Entry, Descent and Landing (EDL) systems, the study’s author – Dr. Mark Paton – concludes that jettisoned hardware from missions to Mars could create a terrible mess near future landing sites.
Dr. Mark Paton is a planetary research scientist who specializes in the interaction between the Martian atmosphere and its surface. As such, he is well-versed in the subject of EDL systems that are designed to land missions on Solar System bodies that have atmospheres. This is certainly a going concern for Mars, where landers and rovers have relied on various means to get to the surface safely.
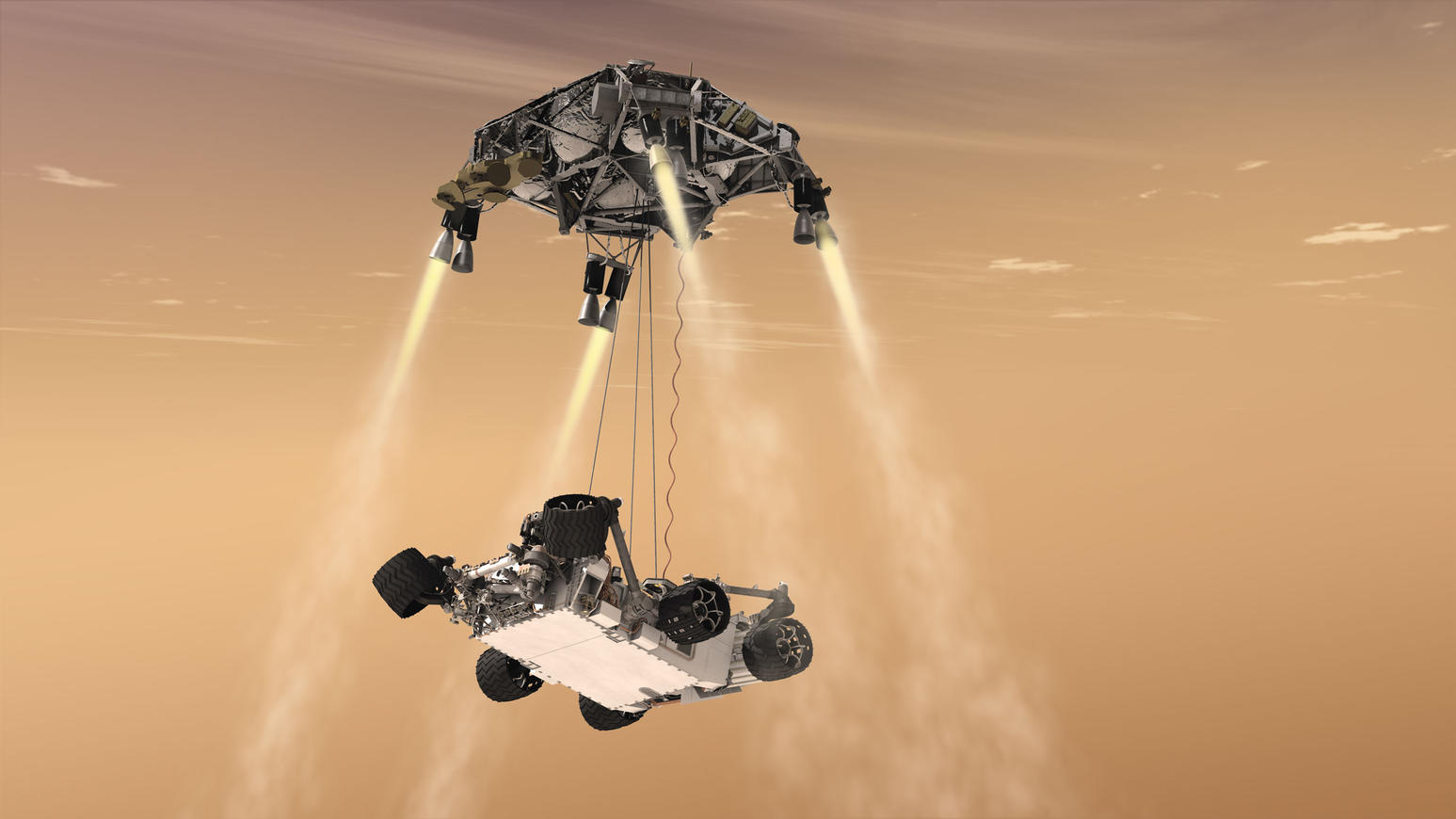
Consider the Curiosity rover, which used a separate EDL system – known as the Sky Crane – to land on Mars in 2012. As the first EDL system of its kind, the Sky Crane was a essentially a rocket-powered backpack mounted on top of the rover. This system kicked in after Curiosity separated from its Descent module (which was slowed by a parachute) and used rockets to slow the rover’s decent even further.
Once it was sufficiently close to the surface, the Sky Crane lowed the rover to the ground with tethers measuring 6.4 meters (21 ft) long. It then detached and landed a safe distance away, not far from the Descent module’s heat shield, backshell, and parachute landed. These jettisoned bits were all photographed from orbit by the MSL’s HiRISE instrument a day after the landing.
Unfortunately, this kind of technology does not address another major concern – which is the accumulation of spent hardware components on the surface of a planet. In time, these could pose risks for future missions, mainly because they have the potential of being blown around and cluttering up other (and future) landing sites that are located not far away.
Artist’s impression of the Mars 2020 with its sky crane landing system deployed. Credit: NASA/JPL
As Dr. Paton indicated in an interview with Seeker columnist (and Universe Today alumnist) Elizabeth Howell:
“Currently available landing systems, using heat shield and parachutes, might be problematic because jettisoned hardware from these landers normally land within a few hundred meters of the lander. I would imagine a sample return mission would not jettison its parachute in close vicinity of the target sample or the cached sample. The parachute might cover the sample, making its retrieval a problem. Landers using large parachutes or other large devices probably pose the greatest risk as these could be easily blown onto equipment on the surface, damaging or covering it.”
For the sake of his study, Dr. Paton relied on 3D computer modelling (using the space flight simulator Orbiter) to examine different types of ELD systems. He then conducted meteorological measurements to determine wind speeds and direction within the Martian Planetary Boundary Layer (PBL), in order to determine their influence on the distribution of jettisoned components across the surface of Mars.
What he found was that winds speeds within the Martian PBL were sufficient enough to blow around certain types of EDL systems. This included parachutes – a mainstay of space missions – as well as next-generations concepts like the HIAC. Basically, these components could be blown onto prelanded assets, even when the lander itself has touched down several kilometers away.
This could play havoc with robotic missions that have sensitive equipment or are attempting to collect samples for return to Earth. And as for crewed missions – such as NASA’s proposed “Journey to Mars”, which is expected to take place in the 2030s – the results could be even worse. Crew habitats, which will be part of all future crewed missions, will rely on solar panels and other devices that need to be free of clutter in order to function.
Artist’s concept of the Deceleration module of Mars Science Laboratory in entering the Martian Atmosphere. Credit: NASA/JPL-Caltech
As such, Dr. Paton advises that future missions be designed so that the amount of hardware they leave behind is minimized. In addition, he advises that any future missions will need to take into account meteorological measurement to make sure that jettisoned components are not likely to blow back and interfere with missions in progress.
“For new landing systems, a detailed trade-off analysis would be required to determine the best way to mitigate this problem,” he said. “To be sure that the wind is blowing away from any landed assets, the winds in the lower few kilometers of the atmosphere would ideally need to be measured close to the time of the lander’s expected arrival.”
As if planning missions to Mars wasn’t already challenging enough! In addition to all the things we need to worry about in getting there, now we need to worry about keeping our landing sites in pristine order. But of course, such considerations are understandable since our presence on Mars is expanding, and many key missions are planned for the coming years.
These include more robotic rovers in the next decade – i.e NASA’s Mars 2020 rover, the ESA’s Exomars rover, and the ISRO’s Mangalyaan 2 rover – an even NASA’s proposed “Journey to Mars” by the 2030s. If we’re going to make Mars a regular destination, we need to learn to pick up after ourselves!
Could one of the next landings on Mars be led by a commercial company? Masten Space Systems vertical take-off and landing vehicle, Xombie, recently tested powered descent and landing trajectory algorithms that could be used for future Mars Entry Descent & Landing (EDL) applications.
“You may have noticed we’ve been flying Xombie a lot lately doing some interesting things,” wrote the Masten team on their website. “We just finished the third leg of a flight campaign on Xombie that expands the boundaries of what we believe to be the nation’s leading terrestrial landing testbed.”
These very fun-to-watch test flights were completed by Masten for the Jet Propulsion Laboratory to test its powered descent and landing trajectory optimization algorithms for future EDL applications.
“It may look easy, but flying VTVL is really hard,” said Masten Space Systems CTO David Masten on Twitter.
The company said the flights this week reached a higher translation velocity than the previous flights and successfully expanded Xombie’s flight envelope. The flight was controlled by Masten’s own Guidance, Navigation & Control system.
The flight ascended to 476.4 meters before translating downrange 750 meters at a horizontal velocity of 24 meters per second (53 mph).
“As far as we know, the 750 meter translation flight represents the longest terrestrial translation flight ever undertaken by a rocket powered vertical takeoff, vertical landing craft” said the Masten website. “You can bet there were a lot of high fives around the Masten team after this flight!”
This was the third test Masten did for JPL to validate their algorithm, and all objectives were successfully met.
Masten Space Systems’ Xombie rocket with Draper Laboratory’s GENIE flight control system takes an untethered flight from the Mojave Air and Space Port. (Photo courtesy of Draper Laboratory)