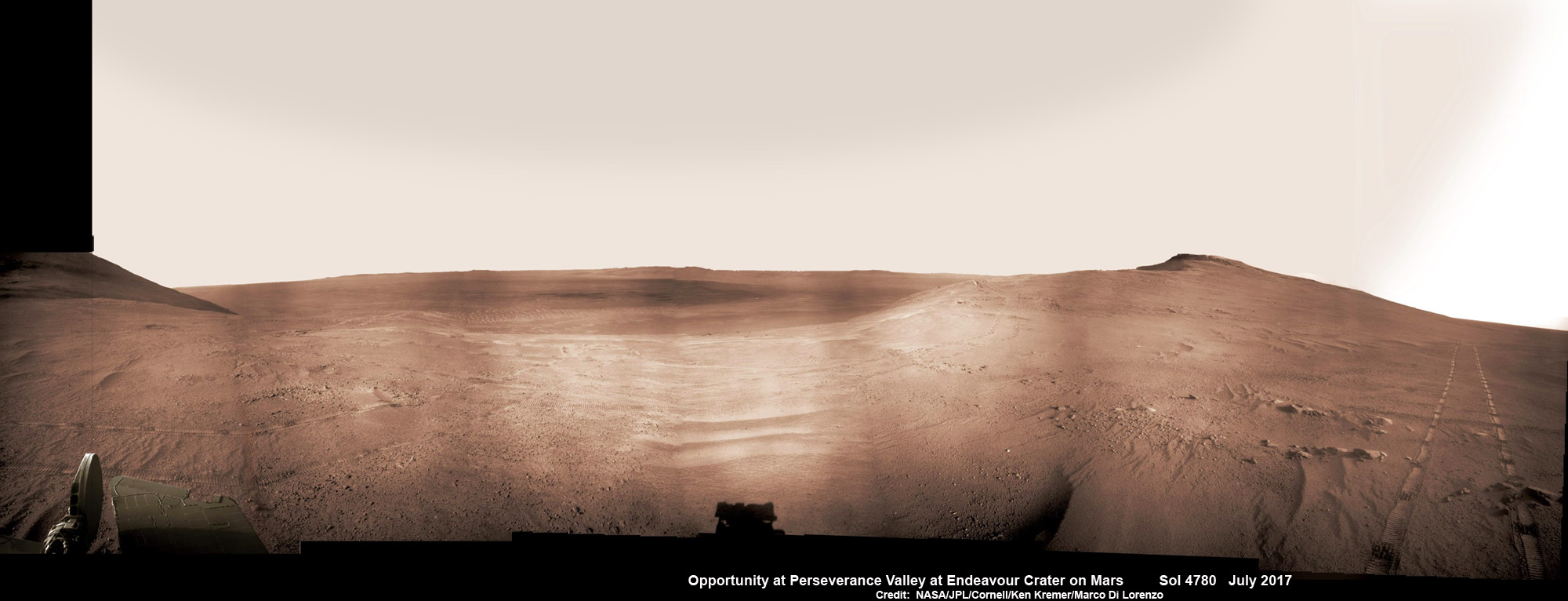
Historic 1st descent down Martian gully. Panoramic view looking down Perseverance Valley after entry at top was acquired by NASA’s Opportunity rover scanning from north to south. It shows numerous wheel tracks at left, center and right as rover conducted walkabout tour prior to starting historic first decent down a Martian gully - possibly carved by water - and looks into the interior of Endeavour crater. Perseverance Valley terminates down near the crater floor in the center of the panorama. The far rim of Endeavour crater is seen in the distance, beyond the dark floor. Rover mast shadow at center and deck at left. This navcam camera photo mosaic was assembled by Ken Kremer and Marco Di Lorenzo from raw images taken on Sol 4780 (5 July 2017) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Historic 1st descent down Martian gully. Panoramic view looking down Perseverance Valley after entry at top was acquired by NASA’s Opportunity rover scanning from north to south. It shows numerous wheel tracks at left, center and right as rover conducted walkabout tour prior to starting historic first decent down a Martian gully – possibly carved by water – and looks into the interior of Endeavour crater. Perseverance Valley terminates down near the crater floor in the center of the panorama. The far rim of Endeavour crater is seen in the distance, beyond the dark floor. Rover mast shadow at center and deck at left. This navcam camera photo mosaic was assembled by Ken Kremer and Marco Di Lorenzo from raw images taken on Sol 4780 (5 July 2017) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
From the precipice of “Perseverance Valley” NASA’s teenaged Red Planet robot Opportunity has begun the historic first ever descent of an ancient Martian gully – that’s simultaneously visually and scientifically “tantalizing” – on an expedition to discern ‘How was it carved?’; by water or other means, Jim Green, NASA’s Planetary Sciences Chief tells Universe Today.
Since water is an indispensable ingredient for life as we know it, the ‘opportunity’ for Opportunity to study a “possibly water-cut” gully on Mars for the first time since they were discovered over four decades ago by NASA orbiters offers a potential scientific bonanza.
“Gullies on Mars have always been of intense interest since first observed by our orbiters,” Jim Green, NASA’s Planetary Sciences Chief explained to Universe Today.
“How were they carved? muses Green. “Water is a natural explanation but this is another planet. Now we have a chance to find out for real!”
Their origin and nature has been intensely debated by researchers for decades. But until now the ability to gather real ‘ground truth’ science by robotic or human explorers has remained elusive.
“This will be the first time we will acquire ground truth on a gully system that just might be formed by fluvial processes,” Ray Arvidson, Opportunity Deputy Principal Investigator of Washington University in St. Louis, told Universe Today.
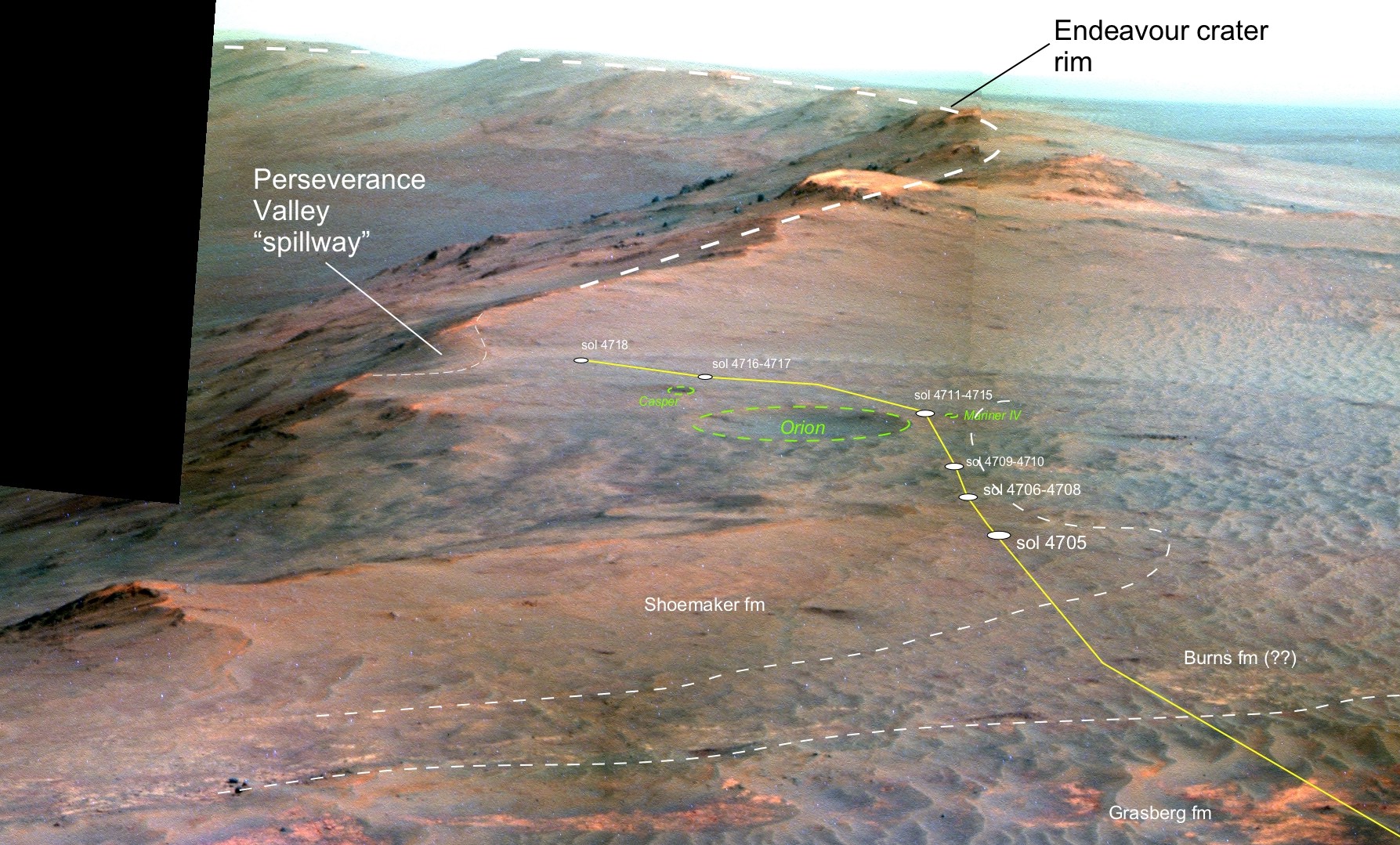
“Perseverance Valley” is located along the eroded western rim of gigantic Endeavour crater – as illustrated by our exclusive photo mosaics herein created by the imaging team of Ken Kremer and Marco Di Lorenzo.
After arriving at the upper entryway to “Perseverance Valley” the six wheeled rover drove back and forth to gather high resolution imagery of the inner slope for engineers to create a 3D elevation map and plot a safe driving path down – as illustrated in our lead mosaic showing the valley and extensive wheel tracks at left, center and right.
Having just this week notched an astounding 4800 Sols roving the Red Planet, NASA’s resilient Opportunity rover has started driving down from the top of “Perseverance Valley” from the spillway overlooking the upper end of the ancient fluid-carved Martian valley into the unimaginably vast eeriness of alien Endeavour crater.
Water, ice or wind may have flowed over the crater rim and into the crater from the spillway.
“It is a tantalizing scene,” said Opportunity Deputy Principal Investigator Ray Arvidson of Washington University in St. Louis, in a statement. “You can see what appear to be channels lined by boulders, and the putative spillway at the top of Perseverance Valley. We have not ruled out any of the possibilities of water, ice or wind being responsible.”
Toward the right side of this scene is a broad notch in the crest of the western rim of Endeavour Crater. Wheel tracks in that area were left by NASA’s Mars Exploration Rover Opportunity as it observed “Perseverance Valley” from above in the spring of 2017. The valley is a major destination for the rover’s extended mission. It descends out of sight on the inner slope of the rim, extending down and eastward from that notch. The component pancam images for this view from a position outside the crater were taken during the span of June 7 to June 19, 2017, sols 4753 to 4765. Credit: NASA/JPL-Caltech/Cornell/Arizona State Univ.
“With the latest drive on sol 4782, Opportunity began the long drive down the floor of Perseverance Valley here on Endeavour crater, says Larry Crumpler, a rover science team member from the New Mexico Museum of Natural History & Science.
“This is rather historic in that it represents the first time that a rover has driven down an apparent water-cut valley on Mars. Over the next few months Opportunity will explore the floor and sides of the valley for evidence of the scale and timing of the fluvial activity, if that is what is represents.”
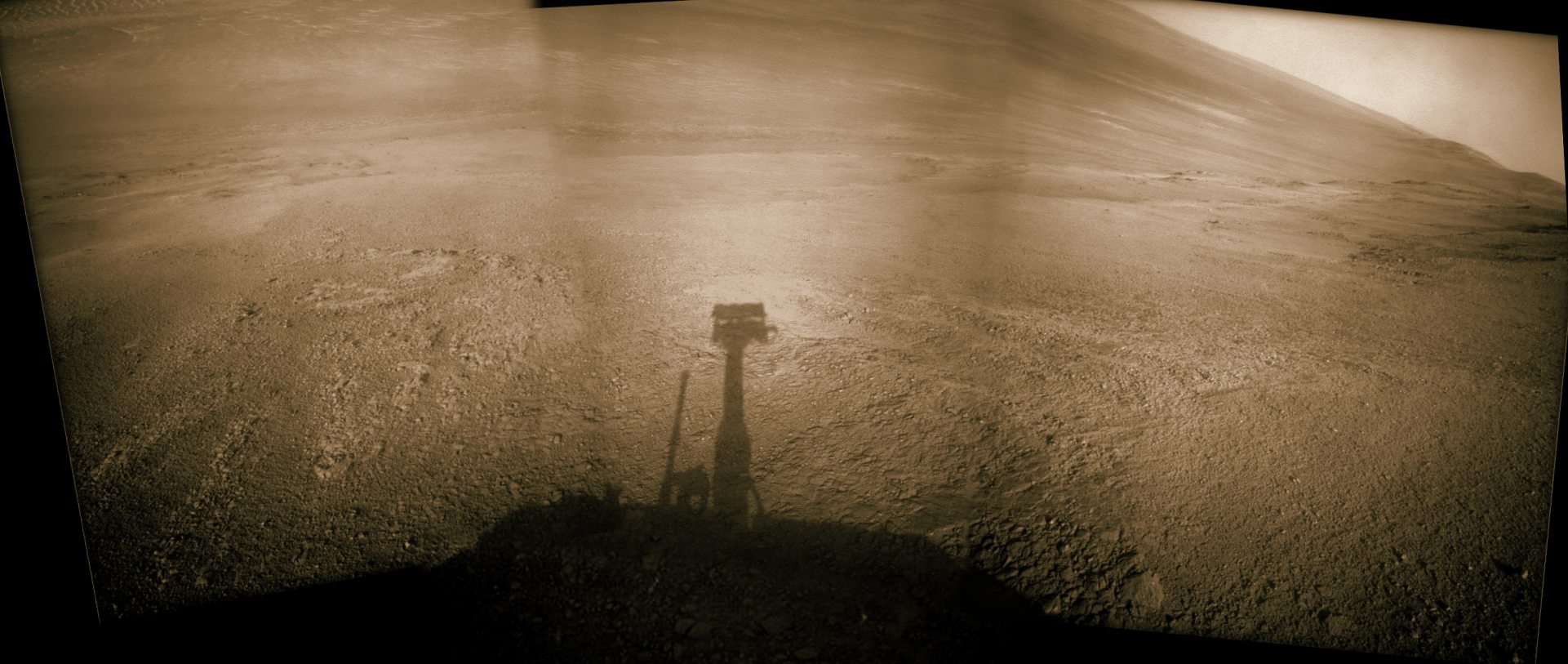
This mosaic view looks down from inside the upper end of “Perseverance Valley” on the inner slope of Endeavour Crater’s western rim after Opportunity started driving down the Martian gully. The scene behind the shadow of the rover’s mast shows Perseverance Valley descending to the floor of Endeavour Crater. This navcam camera photo mosaic was assembled from raw images taken on Sol 4782 (7 July 2017) and colorized. Credit: NASA/JPL/Cornell/Marco Di Lorenzo/Ken Kremer/kenkremer.com
NASA’s unbelievably long lived Martian robot reached a “spillway” at the top of “Perseverance Valley” in May after driving southwards for weeks from the prior science campaign at a crater rim segment called “Cape Tribulation.”
“Investigations in the coming weeks will “endeavor” to determine whether this valley was eroded by water or some other dry process like debris flows,” explains Crumpler.
“It certainly looks like a water cut valley. But looks aren’t good enough. We need additional evidence to test that idea.”
NASA’s Opportunity rover acquired this Martian panoramic view from a promontory that overlooks Perseverance Valley below – scanning from north to south. It is centered on due East and into the interior of Endeavour crater. Perseverance Valley descends from the right and terminates down near the crater floor in the center of the panorama. The far rim of Endeavour crater is seen in the distance, beyond the dark floor. Rover deck and wheel tracks at right. This navcam camera photo mosaic was assembled from raw images taken on Sol 4730 (14 May 2017) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
The valley slices downward from the crest line through the rim from west to east at a breathtaking slope of about 15 to 17 degrees – and measures about two football fields in length!
Huge Endeavour crater spans some 22 kilometers (14 miles) in diameter on the Red Planet. Perseverance Valley slices eastwards at approximately the 8 o’clock position of the circular shaped crater. It sits just north of a rim segment called “Cape Byron.”
Why go and explore the gully at Perseverance Valley?
“Opportunity will traverse to the head of the gully system [at Perseverance] and head downhill into one or more of the gullies to characterize the morphology and search for evidence of deposits,” Arvidson elaborated to Universe Today.
“Hopefully test among dry mass movements, debris flow, and fluvial processes for gully formation. The importance is that this will be the first time we will acquire ground truth on a gully system that just might be formed by fluvial processes. Will search for cross bedding, gravel beds, fining or coarsening upward sequences, etc., to test among hypotheses.”
Exploring the ancient valley is the main science destination of the current two-year extended mission (EM #10) for the teenaged robot, that officially began Oct. 1, 2016. It’s just the latest in a series of extensions going back to the end of Opportunity’s prime mission in April 2004.
Before starting the gully descent, Opportunity conducted a walkabout at the top of the Perseverance Valley in the spillway to learn more about the region before driving down.
“The walkabout is designed to look at what’s just above Perseverance Valley,” said Opportunity Deputy Principal Investigator Ray Arvidson of Washington University in St. Louis, in a statwemwent. “We see a pattern of striations running east-west outside the crest of the rim.”
“We want to determine whether these are in-place rocks or transported rocks,” Arvidson said. “One possibility is that this site was the end of a catchment where a lake was perched against the outside of the crater rim. A flood might have brought in the rocks, breached the rim and overflowed into the crater, carving the valley down the inner side of the rim. Another possibility is that the area was fractured by the impact that created Endeavour Crater, then rock dikes filled the fractures, and we’re seeing effects of wind erosion on those filled fractures.”
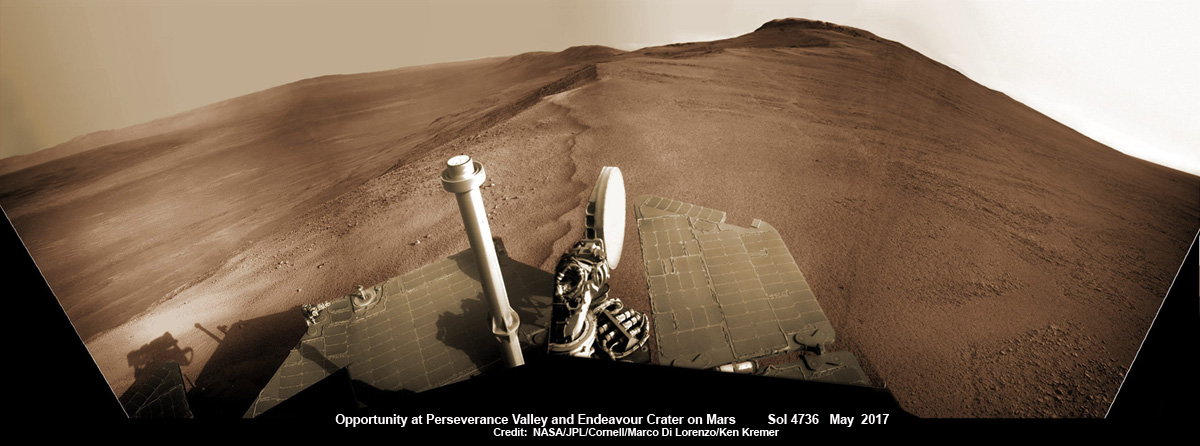
Opportunity rover looks south from the top of Perseverance Valley along the rim of Endeavour Crater on Mars in this partial self portrait including the rover deck and solar panels. Perseverance Valley descends from the right and terminates down near the crater floor. This navcam camera photo mosaic was assembled from raw images taken on Sol 4736 (20 May 2017) and colorized. Credit: NASA/JPL/Cornell/Marco Di Lorenzo/Ken Kremer/kenkremer.com
Having begun the long awaited gully descent, further movements are temporarily on hold since the start of the solar conjunction period which blocks communications between Mars and Earth for about the next two weeks, since Mars is directly behind the sun.
In the meantime, Opportunity will still collect very useful panoramic images and science data while standing still.
The solar conjunction moratorium on commanding extends from July 22 to Aug. 1, 2017.
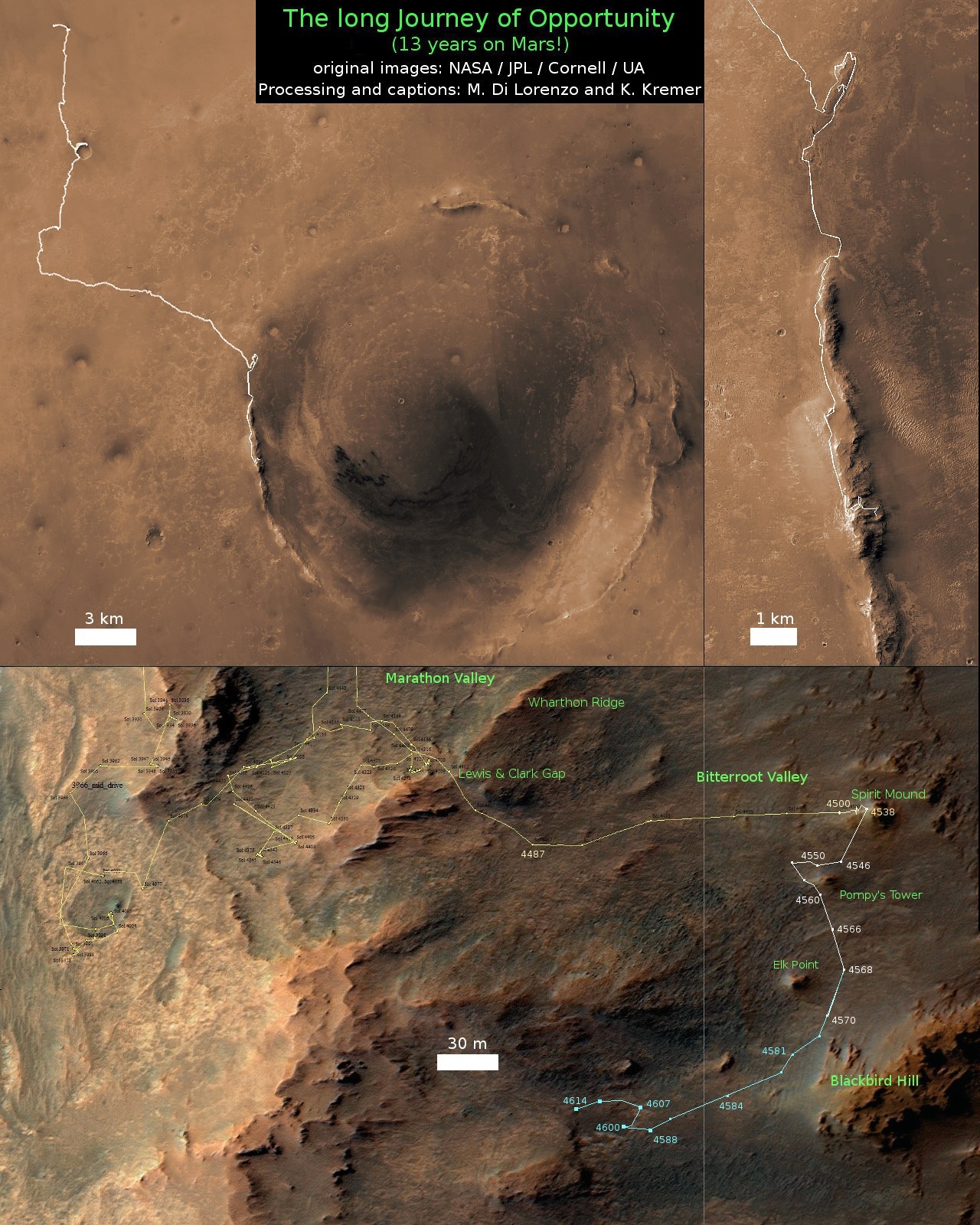
As of today, July 27, 2017, long lived Opportunity has survived over 4800 Sols (or Martian days) roving the harsh environment of the Red Planet.
Opportunity has taken over 221,625 images and traversed over 27.95 miles (44.97 kilometers.- more than a marathon.
See our updated route map below. It shows the context of the rovers over 13 year long traverse spanning more than the 26 mile distance of a Marathon runners race.
The rover surpassed the 27 mile mark milestone on November 6, 2016 (Sol 4546) and will soon surpass the 28 mile mark.
As of Sol 4793 (July 18, 2017) the power output from solar array energy production is currently 332 watt-hours with an atmospheric opacity (Tau) of 0.774 and a solar array dust factor of 0.534, before heading into another southern hemisphere Martian winter later in 2017. It will count as Opportunity’s 8th winter on Mars.
Meanwhile Opportunity’s younger sister rover Curiosity traverses up the lower sedimentary layers at the base of Mount Sharp.
And NASA continues building the next two robotic missions due to touch down in 2018 and 2020.
NASA as well is focusing its human spaceflight efforts on sending humans on a ‘Journey to Mars’ in the 2030s with the Space Launch System (SLS) mega rocket and Orion deep space crew capsule.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
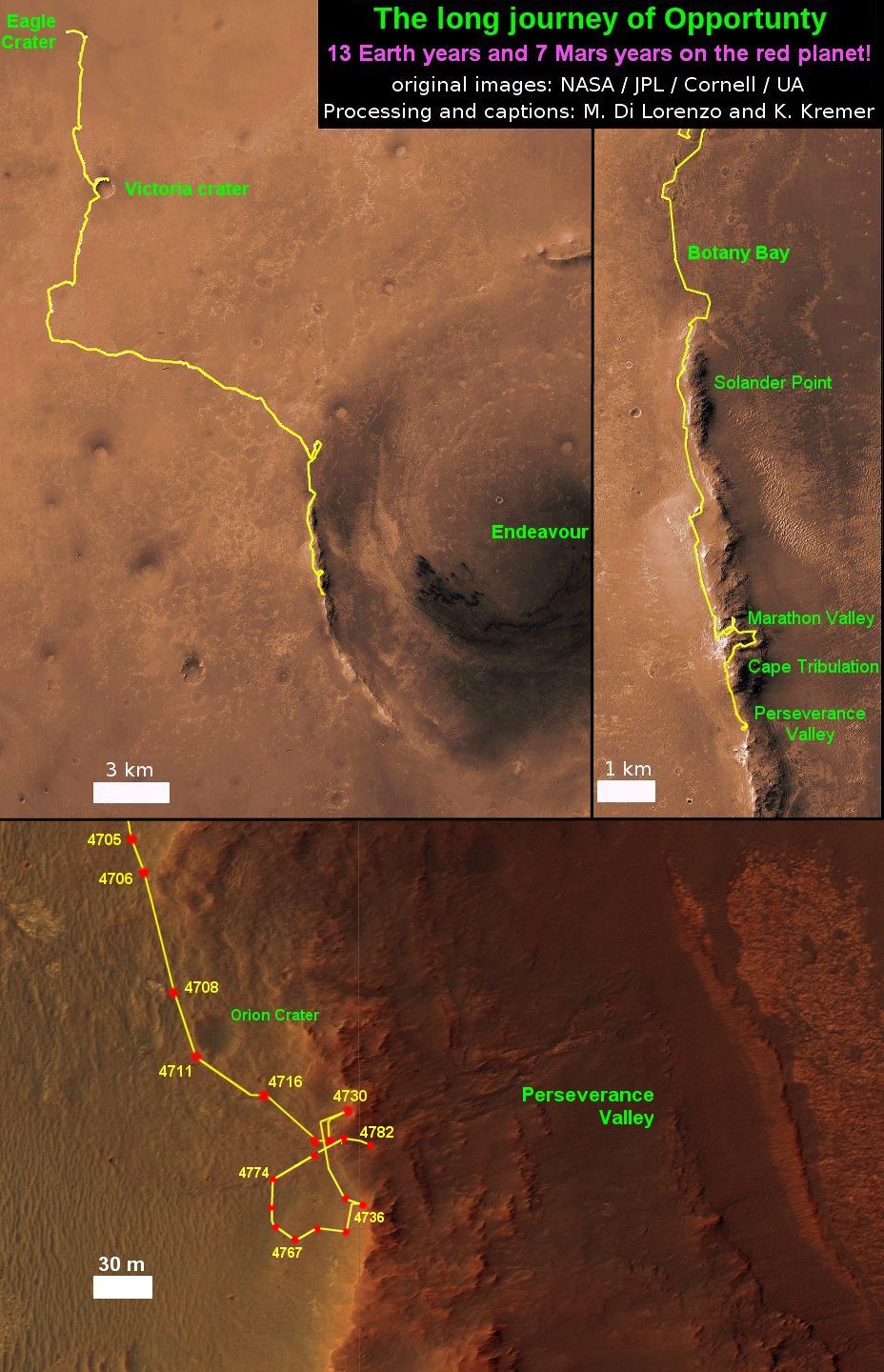
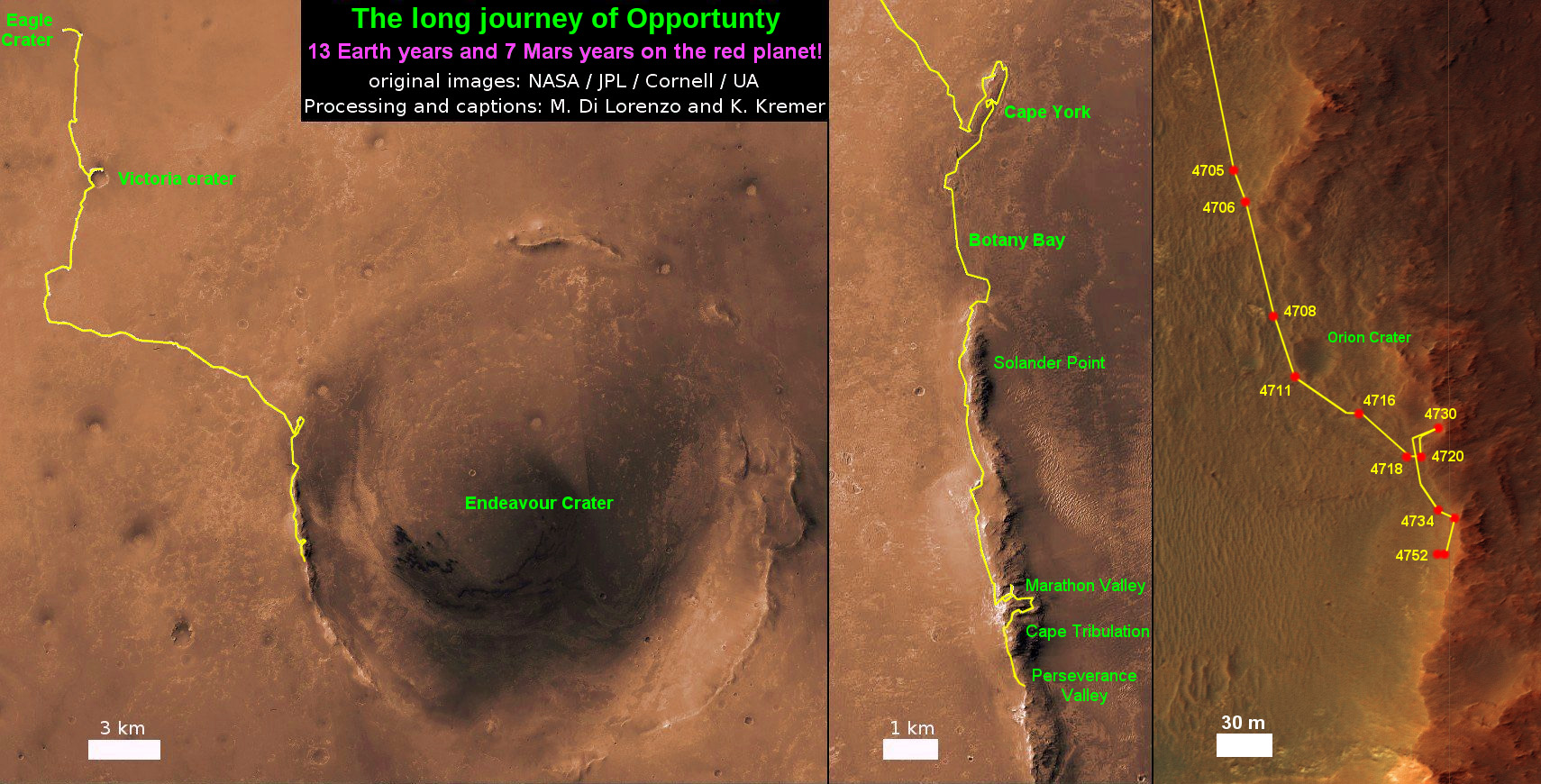
13 Year Traverse Map for NASA’s Opportunity rover from 2004 to 2017. This map shows the entire 43 kilometer (27 mi) path the rover has driven on the Red Planet during over 13 years and more than a marathon runners distance for over 4782 Sols, or Martian days, since landing inside Eagle Crater on Jan 24, 2004 – to current location at the western rim of Endeavour Crater. After studying Spirit Mound and ascending back uphill the rover has reached her next destination in May 2017- the Martian water carved gully at Perseverance Valley near Orion crater. Rover surpassed Marathon distance on Sol 3968 after reaching 11th Martian anniversary on Sol 3911. Opportunity discovered clay minerals at Esperance – indicative of a habitable zone – and searched for more at Marathon Valley. Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer/kenkremer.com
Opportunity rover looks south from the top of Perseverance Valley along the rim of Endeavour Crater on Mars in this partial self portrait including the rover deck and solar panels. Perseverance Valley descends from the right and terminates down near the crater floor. This navcam camera photo mosaic was assembled from raw images taken on Sol 4736 (20 May 2017) and colorized. Credit: NASA/JPL/Cornell/Marco Di Lorenzo/Ken Kremer/kenkremer.com
Opportunity rover looks south from the top of Perseverance Valley along the rim of Endeavour Crater on Mars in this partial self portrait including the rover deck and solar panels. Perseverance Valley descends from the right and terminates down near the crater floor. This navcam camera photo mosaic was assembled from raw images taken on Sol 4736 (20 May 2017) and colorized. Credit: NASA/JPL/Cornell/Marco Di Lorenzo/Ken Kremer/kenkremer.com
Now well into her 13th year roving the Red Planet, NASA’s astoundingly resilient Opportunity rover has arrived at the precipice of “Perseverance Valley” – overlooking the upper end of an ancient fluid-carved valley on Mars “possibly water-cut” that flows down into the unimaginably vast eeriness of alien Endeavour crater.
In a remarkable first time feat and treat for having ‘persevered’ so long on the inhospitably frigid Martian terrain, Opportunity has been tasked by her human handlers to drive down a Martian gully carved billions of years ago – by a fluid that might have been water – and conduct unparalleled scientific exploration, that will also extend into the interior of Endeavour Crater for the first time.
No Mars rover has done that before.
“This will be the first time we will acquire ground truth on a gully system that just might be formed by fluvial processes,” Ray Arvidson, Opportunity Deputy Principal Investigator of Washington University in St. Louis, told Universe Today.
“Opportunity has arrived at the head of Perseverance Valley, a possible water-cut valley here at a low spot along the rim of the 22-km diameter Endeavour impact crater,” says Larry Crumpler, a rover science team member from the New Mexico Museum of Natural History & Science.
“The next month or so will be an exciting time, for no rover has ever driven down a potential ancient water-cut valley before,” Crumpler gushes.
“Perseverance Valley” is located along the eroded western rim of gigantic Endeavour crater – as illustrated by our exclusive photo mosaics herein created by the imaging team of Ken Kremer and Marco Di Lorenzo.
The mosaics show the “spillway” as the entry point to the ancient valley.
NASA’s Opportunity rover acquired this Martian panoramic view from a promontory that overlooks Perseverance Valley below – scanning from north to south. It is centered on due East and into the interior of Endeavour crater. Perseverance Valley descends from the right and terminates down near the crater floor in the center of the panorama. The far rim of Endeavour crater is seen in the distance, beyond the dark floor. Rover deck and wheel tracks at right. This navcam camera photo mosaic was assembled from raw images taken on Sol 4730 (14 May 2017) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
“Investigations in the coming weeks will “endeavor” to determine whether this valley was eroded by water or some other dry process like debris flows,” explains Crumpler.
“It certainly looks like a water cut valley. But looks aren’t good enough. We need additional evidence to test that idea.”
The valley slices downward from the crest line through the rim from west to east at a breathtaking slope of about 15 to 17 degrees – and measures about two football fields in length!
Huge Endeavour crater spans some 22 kilometers (14 miles) in diameter on the Red Planet. Perseverance Valley slices eastwards at approximately the 8 o’clock position of the circular shaped crater. It sits just north of a rim segment called “Cape Byron.”
Why go and explore the gully at Perseverance Valley?
“Opportunity will traverse to the head of the gully system [at Perseverance] and head downhill into one or more of the gullies to characterize the morphology and search for evidence of deposits,” Arvidson elaborated.
“Hopefully test among dry mass movements, debris flow, and fluvial processes for gully formation. The importance is that this will be the first time we will acquire ground truth on a gully system that just might be formed by fluvial processes. Will search for cross bedding, gravel beds, fining or coarsening upward sequences, etc., to test among hypotheses.”
Perspective view of Opportunity’s traverse along Endeavour crater rim over the last few weeks towards the Perseverance Valley “spillway” on Mars during Spring 2017. The entry point for the planned drive back into the crater is visible as the low notch just to the left (east) of the current (sol 4718) rover position. Credit: NASA/JPL/Cornell/NMMNH /Larry Crumpler
Exploring the ancient valley is the main science destination of the current two-year extended mission (EM #10) for the teenaged robot, that officially began Oct. 1, 2016. It’s just the latest in a series of extensions going back to the end of Opportunity’s prime mission in April 2004.
What are the immediate tasks ahead that Opportunity must accomplish before descending down the gully to thoroughly and efficiently investigate the research objectives?
In a nutshell, extensive imaging from a local high point promontory to create a long-baseline 3 D stereo image of the valley and a “walk-about” to assess the local geology.
The rover is collecting images from two widely separated points at a dip at the valley spillway to build an “extraordinarily detailed three-dimensional analysis of the terrain” called a digital elevation map.
“Opportunity has been working on a panorama from the overlook for the past couple of sols. The idea is to get a good overview of the valley from a high point before driving down it,” Crumpler explains.
“But before we drive down the valley, we want to get a good sense of the geologic features here on the head of the valley. It could come in handy as we drive down the valley and may help us understand some things, particularly the lithology of any materials we find on the valley floor or at the terminus down near the crater floor.”
“So we will be doing a short “walk-about” here on the outside of the crater rim near the “spillway” into the valley.”
“We will drive down it to further assess its origin and to further explore the structure and stratigraphy of this large impact crater.”
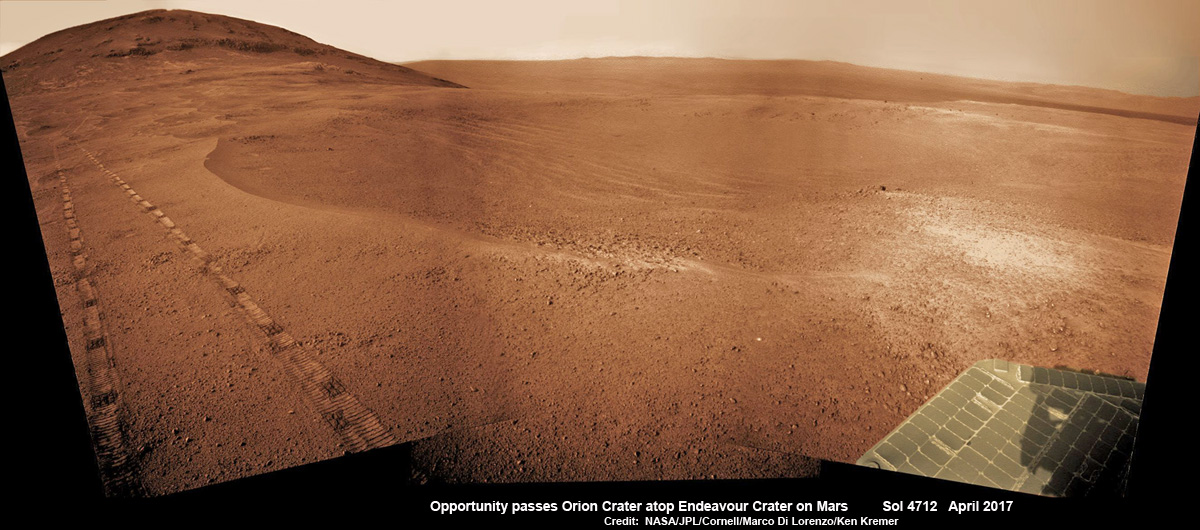
NASA’s Opportunity Mars rover passed near this small, 90-foot-wide and relatively fresh crater in April 2017, during the 45th anniversary of the Apollo 16 mission to the moon. The rover team chose to call it “Orion Crater,” after the Apollo 16 lunar module, Orion, which carried astronauts John Young and Charles Duke to and from the surface of the moon in April 1972 while crewmate Ken Mattingly piloted the Apollo 16 command module, Casper, in orbit around the moon. The rover’s Navigation Camera (Navcam) recorded this view assembled from raw images taken on Sol 4712 (26 April 2017) and colorized. Credit: NASA/JPL/Cornell/Marco Di Lorenzo/Ken Kremer/kenkremer.com
The six wheeled rover landed on Mars on January 24, 2004 PST on the alien Martian plains at Meridiani Planum – as the second half of a stupendous sister act.
Expected to last just 3 months or 90 days, Opportunity has now endured nearly 13 ½ years or an unfathomable 53 times beyond the “warrantied” design lifetime.
Her twin sister Spirit, had successfully touched down 3 weeks earlier on January 3, 2004 inside 100-mile-wide Gusev crater and survived more than six years.
Opportunity has been exploring Endeavour almost six years – since arriving at the humongous crater in 2011. Endeavour crater was formed when it was carved out of the Red Planet by a huge meteor impact billions of years ago.
“Endeavour crater dates from the earliest Martian geologic history, a time when water was abundant and erosion was relatively rapid and somewhat Earth-like,” explains Crumpler.
Exactly what the geologic process was that carved Perseverance Valley into the rim of Endeavour Crater billions of years ago has not yet been determined, but there are a wide range of options researchers are considering.
“Among the possibilities: It might have been flowing water, or might have been a debris flow in which a small amount of water lubricated a turbulent mix of mud and boulders, or might have been an even drier process, such as wind erosion,” say NASA scientists.
“The mission’s main objective with Opportunity at this site is to assess which possibility is best supported by the evidence still in place.”
Extensive imaging with the mast mounted pancam and navcam cameras is currently in progress.
“The long-baseline stereo imaging will be used to generate a digital elevation map that will help the team carefully evaluate possible driving routes down the valley before starting the descent,” said Opportunity Project Manager John Callas of JPL, in a statement.
“Reversing course back uphill when partway down could be difficult, so finding a path with minimum obstacles will be important for driving Opportunity through the whole valley. Researchers intend to use the rover to examine textures and compositions at the top, throughout the length and at the bottom, as part of investigating the valley’s history.”
The team is also dealing with a new wheel issue and evaluating fixes. The left-front wheel is stuck due to an actuator stall.
“The rover experienced a left-front wheel steering actuator stall on Sol 4750 (June 4, 2017) leaving the wheel ‘toed-out’ by 33 degrees,” the team reported in a new update.
Thus the extensive Pancam panorama is humorously being called the “Sprained Ankle Panorama.” Selected high-value targets of the surrounding area will be imaged with the full 13-filter Pancam suite.
After reaching the bottom of Perseverance Valley, Opportunity will explore the craters interior for the first time during the mission.
“Once down at the end of the valley, Opportunity will be directed to explore the crater fill on a drive south at the foot of the crater walls,” states Crumpler.
As of today, June 17, 2017, long lived Opportunity has survived over 4763 Sols (or Martian days) roving the harsh environment of the Red Planet.
Opportunity has taken over 220,800 images and traversed over 27.87 miles (44.86 kilometers) – more than a marathon.
See our updated route map below. It shows the context of the rovers over 13 year long traverse spanning more than the 26 mile distance of a Marathon runners race.
The rover surpassed the 27 mile mark milestone on November 6, 2016 (Sol 4546).
NASA’s Opportunity rover acquired this Martian panoramic view from a promontory that overlooks Perseverance Valley below – scanning from north to south. It is centered on due East and into the interior of Endeavour crater. Perseverance Valley descends from the right and terminates down near the crater floor in the center of the panorama. The far rim of Endeavour crater is seen in the distance, beyond the dark floor. Rover deck and wheel tracks at right. This navcam camera photo mosaic was assembled from raw images taken on Sol 4730 (14 May 2017) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
As of Sol 4759 (June 13, 2017) the power output from solar array energy production is currently 343 watt-hours with an atmospheric opacity (Tau) of 0.842 and a solar array dust factor of 0.529, before heading into another southern hemisphere Martian winter later in 2017. It will count as Opportunity’s 8th winter on Mars.
“The science team is really jazzed at starting to see this area up close and looking for clues to help us distinguish among multiple hypotheses about how the valley formed,” said Opportunity Project Scientist Matt Golombek of NASA’s Jet Propulsion Laboratory, Pasadena, California.
NASA’s Opportunity rover scans around and across to vast Endeavour crater on Dec. 19, 2016, as she climbs steep slopes on the way to reach a water carved gully along the eroded craters western rim. Note rover wheel tracks at center. This navcam camera photo mosaic was assembled from raw images taken on Sol 4587 (19 Dec. 2016) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Meanwhile Opportunity’s younger sister rover Curiosity traverses and drills into the lower sedimentary layers at the base of Mount Sharp.
And NASA continues building the next two robotic missions due to touch down in 2018 and 2020.
13 Year Traverse Map for NASA’s Opportunity rover from 2004 to 2017. This map shows the entire 44 kilometer (27 mi) path the rover has driven on the Red Planet during over 13 years and more than a marathon runners distance for over 4763 Sols, or Martian days, since landing inside Eagle Crater on Jan 24, 2004 – to current location at the western rim of Endeavour Crater at the head of Perseverance Valley. After studying Spirit Mound and ascending back uphill the rover has reached her next destination in May 2017- the Martian water carved gully at Perseverance Valley near Orion crater. Rover surpassed Marathon distance on Sol 3968 after reaching 11th Martian anniversary on Sol 3911. Opportunity discovered clay minerals at Esperance – indicative of a habitable zone – and searched for more at Marathon Valley. Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer/kenkremer.com
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
Learn more about the Opportunity rover and upcoming SpaceX launch of BulgariaSat 1, recent SpaceX Dragon CRS-11 resupply launch to ISS, NASA missions and more at Ken’s upcoming outreach events at Kennedy Space Center Quality Inn, Titusville, FL:
June 17-19: “Opportunity Mars rover, SpaceX BulgariaSat 1 launch, SpaceX CRS-11 and CRS-10 resupply launches to the ISS, Inmarsat 5 and NRO Spysat, EchoStar 23, SLS, Orion, Commercial crew capsules from Boeing and SpaceX , Heroes and Legends at KSCVC, ULA Atlas/John Glenn Cygnus launch to ISS, SBIRS GEO 3 launch, GOES-R weather satellite launch, OSIRIS-Rex, Juno at Jupiter, InSight Mars lander, SpaceX and Orbital ATK cargo missions to the ISS, ULA Delta 4 Heavy spy satellite, Curiosity explores Mars, Pluto and more,” Kennedy Space Center Quality Inn, Titusville, FL, evenings
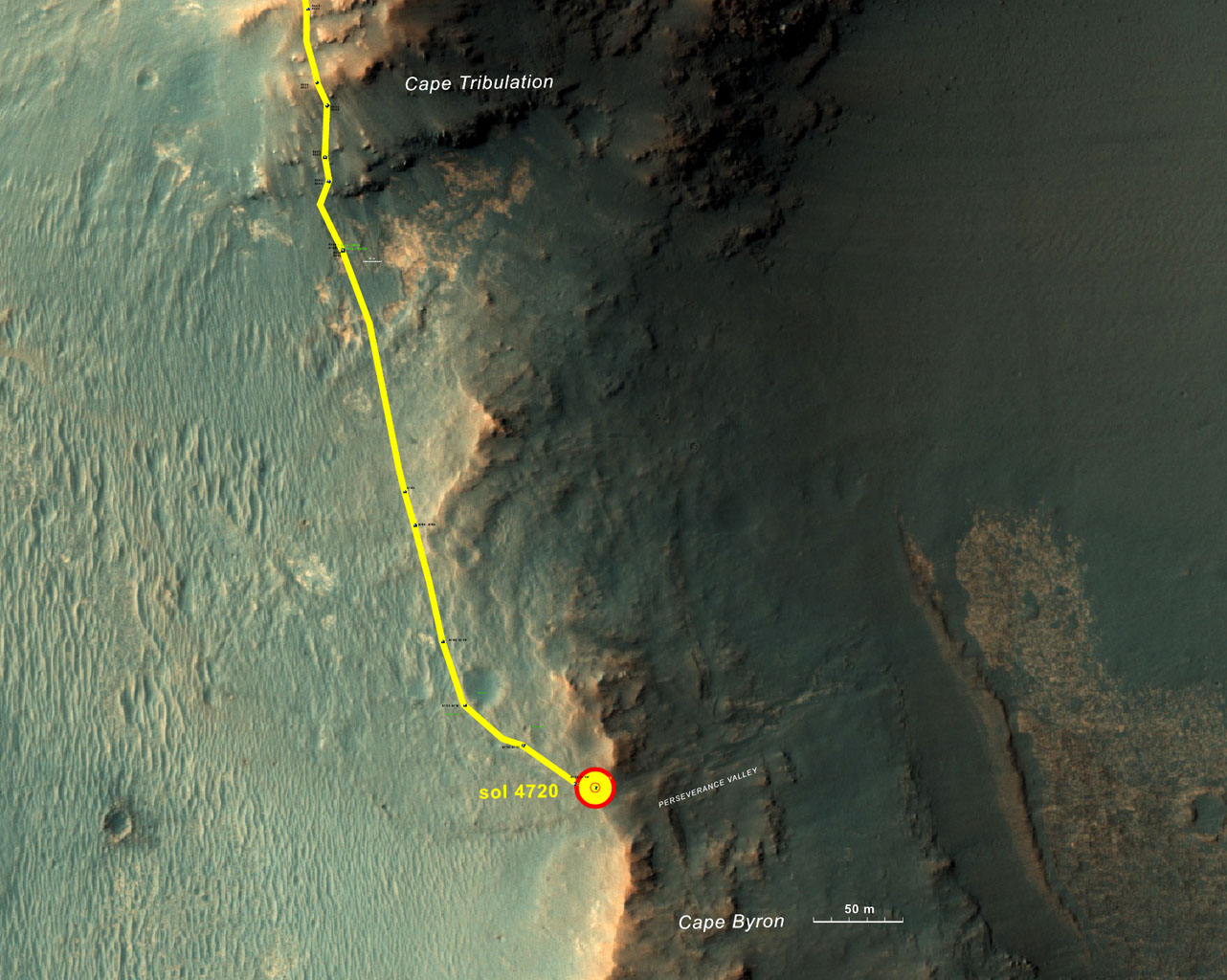
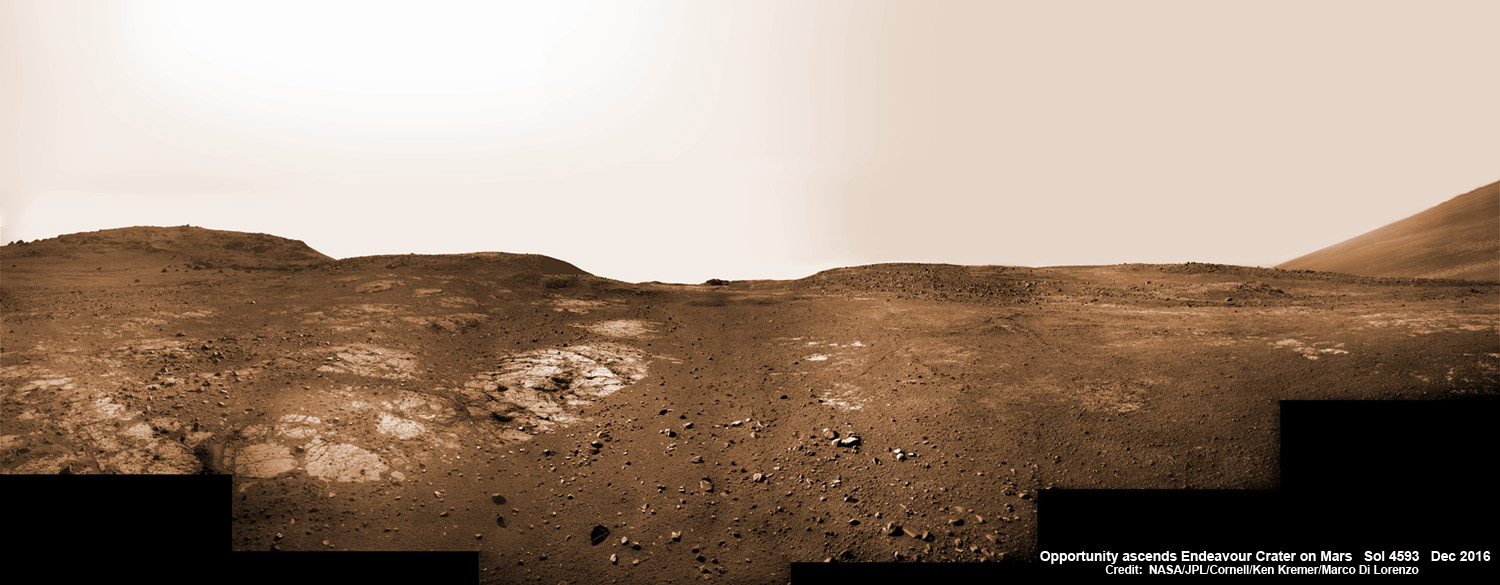
This graphic shows the route that NASA’s Mars Exploration Rover Opportunity drove in its final approach to “Perseverance Valley” on the western rim of Endeavour Crater during spring 2017. Credits: NASA/JPL-Caltech/Univ. of Arizona/NMMNH13 Years on Mars! On Christmas Day 2016, NASA’s Opportunity rover scans around vast Endeavour crater as she ascends steep rocky slopes on the way to reach a water carved gully along the eroded craters western rim. This navcam camera photo mosaic was assembled from raw images taken on Sol 4593 (25 Dec. 2016) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
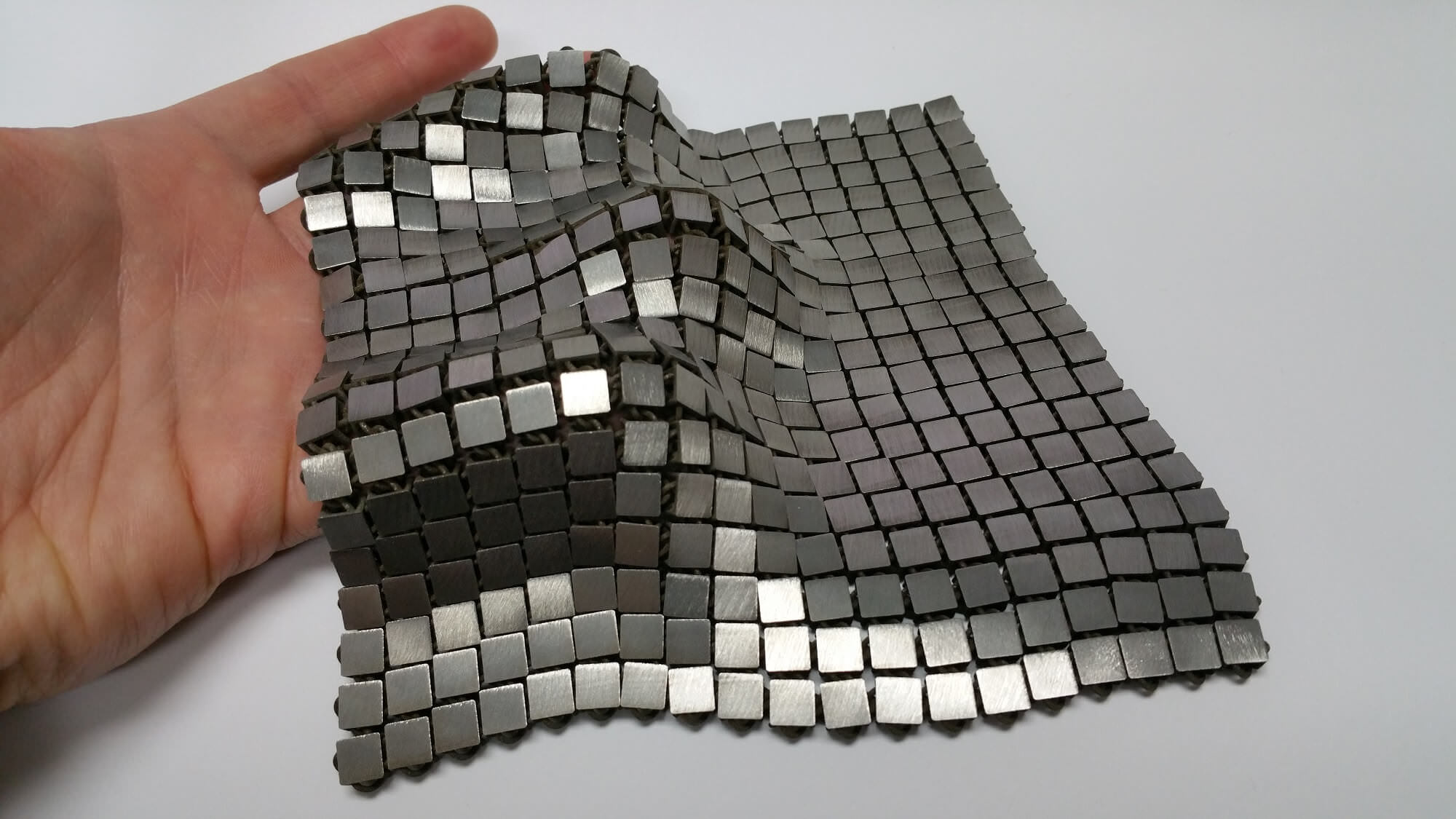
This metallic "space fabric" was created using 3-D printed techniques that add different functionality to each side of the material. Credits: NASA/JPL-Caltech
One would think NASA was preparing for a some sword fights in space! At least, that’s the impression one might get when they see the new armor NASA is developing for the first time. Officially, they are referring to it as a new type of “space fabric“, one which will provide protection to astronauts, spaceships and deployable devices. But to the casual observer, it looks a lot like chain mail armor!
The new armor is the brainchild of Polit Casillas, a systems engineer from NASA’s Jet Propulsion Laboratory. Inspired by traditional textiles, this armor relies on advances made in additive manufacturing (aka. 3-D printing) to create woven metal fabrics that can fold and change shape quickly. And someday soon, it could be used for just about everything!
As the son of a fashion designer in Spain, Casillas grew up around fabrics and textiles, and was intrigued by how they are used for the sake of design. Much in the same way that textiles are produced by weaving together countless threads, Casilla’s prototype space fabric relies on 3-D printing to create metal squares in one piece, which are then strung together to form a coat of armor.
Another example of a 3-D-printed metallic “space fabric.” The bottom and top sides of the fabric are designed to have different functionality. Credits: NASA/JPL-Caltech
In addition to his work with this new space fabric, Casillas co-leads JPL’s Atelier workshop, which specialized in the rapid-prototyping of advanced concepts and systems. This fast-paced collaborative environment works with different technologies and looks for ways to incorporate new ones (such as 4-D printing) into existing designs. As Casillas described this concept in a NASA press release:
“We call it ‘4-D printing’ because we can print both the geometry and the function of these materials. If 20th Century manufacturing was driven by mass production, then this is the mass production of functions.”
The space fabrics have four essential functions, which includes reflectivity, passive heat management, foldability and tensile strength. With one side reflecting light and the other absorbing it, the material acts as a means of thermal control. It can also fold in many different ways and adapt to shapes, all the while maintaining tensile strength to ensure it can sustain forces pulling on it.
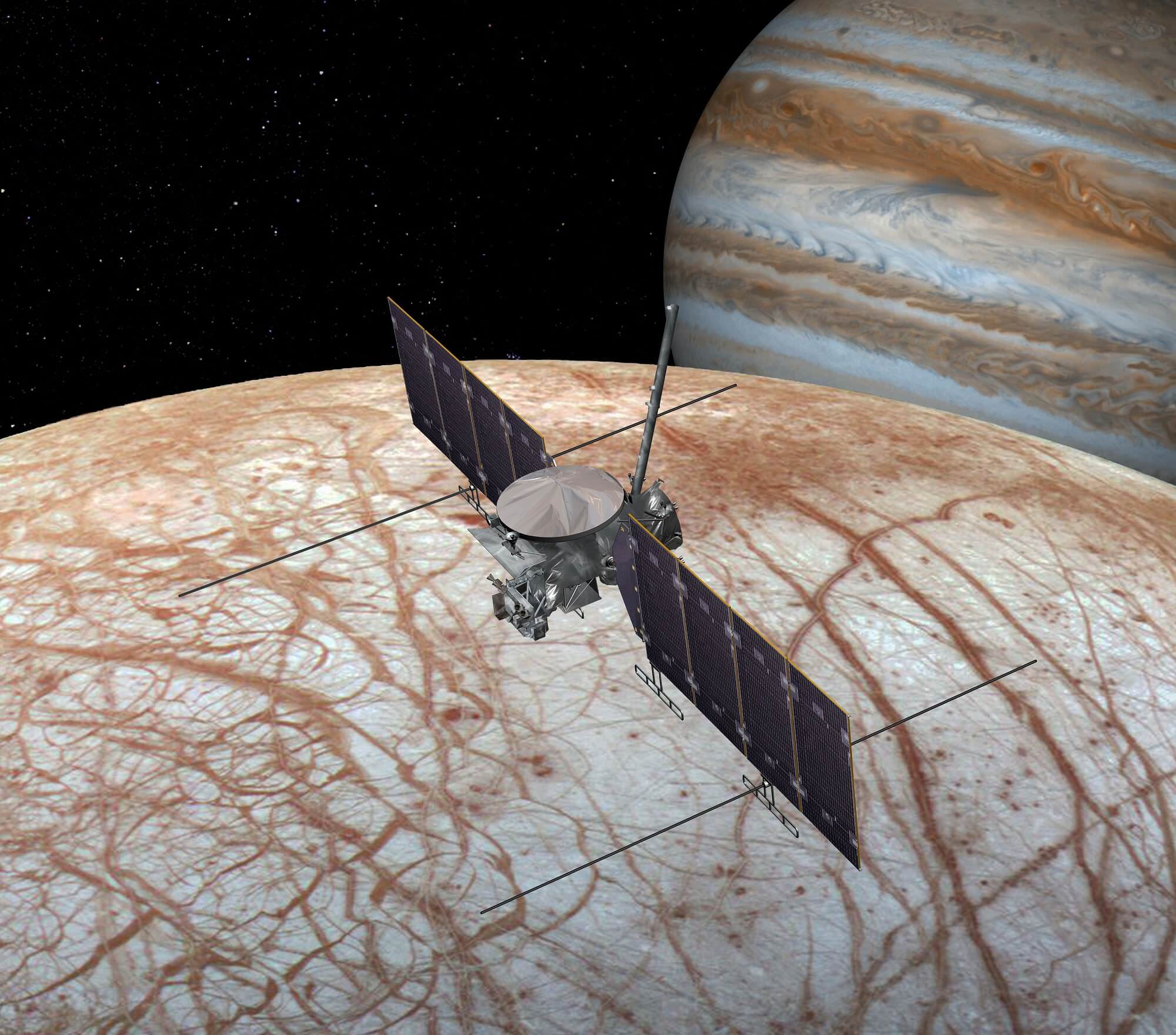
These fabrics could be used to protect astronauts and shield large antennas, deployable devices and spacecraft from meteorites and other hazards. In addition, they could be used to ensure that missions to extreme environments would be protected from the elements. Consider Jupiter’s moon Europa, which NASA is planning on exploring in the coming decade using a lander – aka. the Europa Clipper mission.
Artist’s concept of a Europa Clipper mission. Credit: NASA/JPL
Here, and on other “ocean worlds” – like Ceres, Enceladus, Titan and Pluto – this sort of flexible armor could provide insulation for spacecraft. They could be used on landing struts to ensure that they could change shape to fit over uneven terrain as well. This kind of material could also be used to build habitats for Mars or the Moon – like the South Pole-Aitken Basin, where permanently-shadowed craters allow for the existence of water ice.
Another benefit of this material is the fact that it is considerably cheaper to produce compared to materials made using traditional fabrication methods. Under ordinary conditions, designing and building spacecraft is a complex and costly process. But by adding multiple functions to a material at different stages of development, the whole process can be made cheaper and new designs can be implemented.
Andrew Shapiro-Scharlotta is a manager at the JPL’s Space Technology Office, an office responsible for funding early-stage technologies like the space fabric. As he put it, this sort of production process could enable all kinds of designs and new mission concepts. “We are just scratching the surface of what’s possible,” he said. “The use of organic and non-linear shapes at no additional costs to fabrication will lead to more efficient mechanical designs.”
In keeping with how 3-D printing has been developed for use aboard the ISS, the JPL team not only wants to use this fabric in space, but also manufacture it in space as well. In the future, Casillas also envisions a process whereby tools and structural materials can be printed from recycled materials, offering additional cost-savings and enabling rapid, on-demand production of necessary components.
Such a production process could revolutionize the way spacecraft and space systems are created. Instead of ships, suits, and robotic craft created from many different parts (which then have to be assembled), they could be printed out like “whole cloth”. The manufacturing revolution, it seems, loometh!
13 Years on Mars! On Christmas Day 2016, NASA’s Opportunity rover scans around vast Endeavour crater as she ascends steep rocky slopes on the way to reach a water carved gully along the eroded craters western rim. This navcam camera photo mosaic was assembled from raw images taken on Sol 4593 (25 Dec. 2016) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
13 Years on Mars!
On Christmas Day 2016, NASA’s Opportunity rover scans around vast Endeavour crater as she ascends steep rocky slopes on the way to reach a water carved gully along the eroded craters western rim. This navcam camera photo mosaic was assembled from raw images taken on Sol 4593 (25 Dec. 2016) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
NASA’s truly outstanding Opportunity rover continues “making new discoveries about ancient Mars” as she commemorates 13 Years since bouncing to a touchdown on Mars, in a feat that is “truly amazing” – the deputy chief scientist Ray Arvidson told Universe Today exclusively.
“Reaching the 13th year anniversary with a functioning rover making new discoveries about ancient Mars on a continuing basis is truly amazing,” Ray Arvidson, Opportunity Deputy Principal Investigator of Washington University in St. Louis, told Universe Today.
Put another way Opportunity is 13 YEARS into her 3 MONTH mission! And still going strong!
During the past year the world famous rover discovered “more extensive aqueous alteration within fractures and more mild alteration within the bedrock outcrops” at Endeavour crater, Arvidson elaborated.
And now she is headed to her next target – an ancient water carved gully!
The gully is situated about 0. 6 mile (1.6 km) south of the robots current location.
But to get there she first has to heroically ascend steep rocky slopes inclined over 20 degrees along the eroded craters western rim – and it’s no easy task! Slipping and sliding along the way and all alone on difficult alien terrain.
Furthermore she is 51 times beyond her “warrantied” life expectancy of merely 90 Sols promised at the time of landing so long ago – roving the surface of the 4th rock from the Sun during her latest extended mission; EM #10.
How was this incredible accomplishment achieved?
“Simply a well-made and thoroughly tested American vehicle,” Arvidson responded.
NASA’s Opportunity rover scans around and across to vast Endeavour crater on Dec. 19, 2016, as she climbs steep slopes on the way to reach a water carved gully along the eroded craters western rim. Note rover wheel tracks at center. This navcam camera photo mosaic was assembled from raw images taken on Sol 4587 (19 Dec. 2016) and colorized. Credit: NASA/JPL/Cornell/Ken Kremer/kenkremer.com/Marco Di Lorenzo
The six wheeled rover landed on Mars on January 24, 2004 PST on the alien Martian plains at Meridiani Planum -as the second half of a stupendous sister act.
Her twin sister Spirit, had successfully touched down 3 weeks earlier on January 3, 2004 inside 100-mile-wide Gusev crater and survived more than six years.
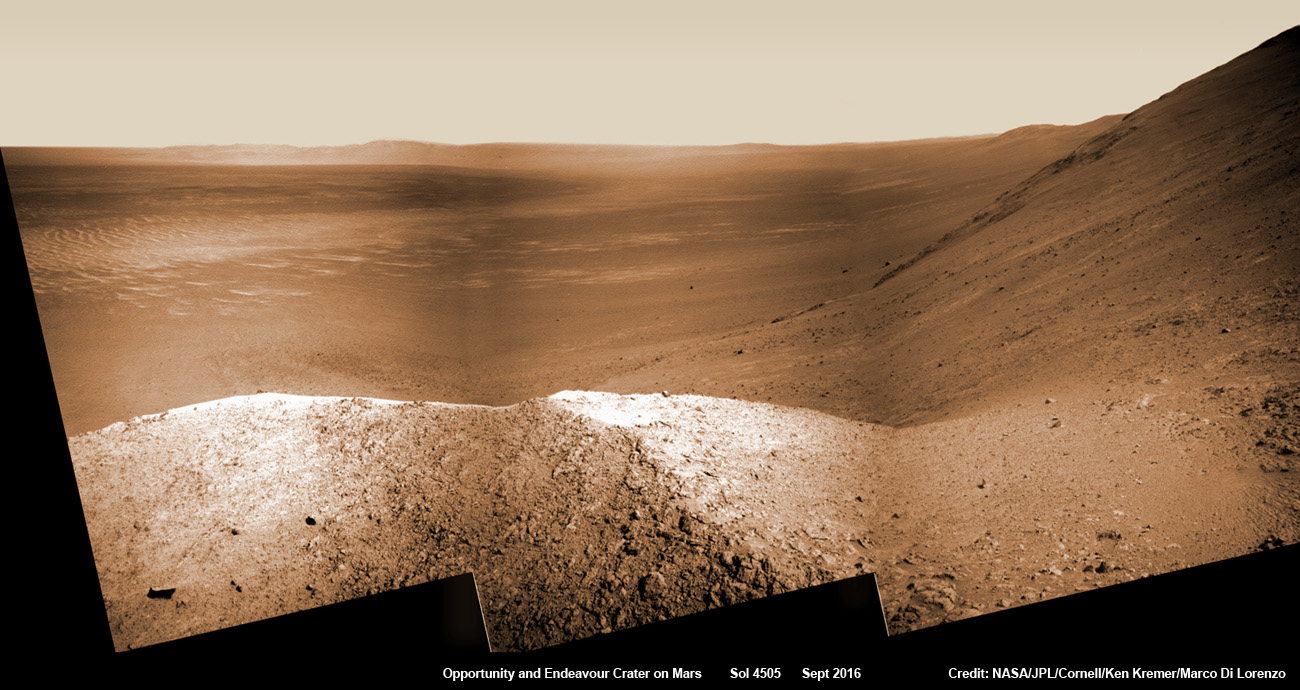
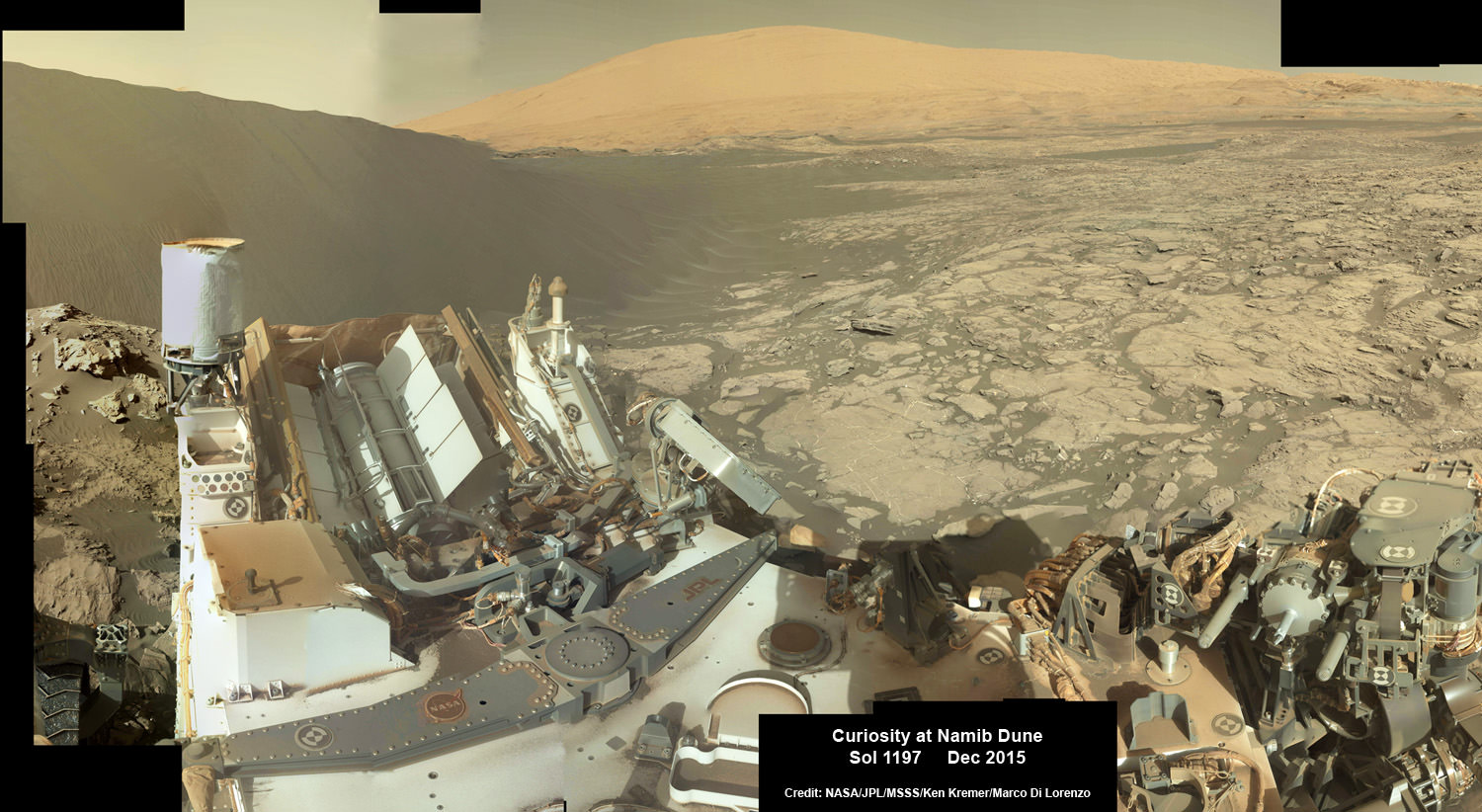
NASA’s Opportunity explores Spirit Mound after descending down Marathon Valley and looks out across the floor of vast Endeavour crater. This navcam camera photo mosaic was assembled from raw images taken on Sol 4505 (25 Sept 2016) and colorized. Credit: NASA/JPL/Cornell/ Ken Kremer/kenkremer.com/Marco Di Lorenzo
Opportunity concluded 2016 and starts 2017 marching relentlessly towards an ancient water carved gully along the eroded rim of vast Endeavour crater – the next science target on her heroic journey traversing across never before seen Red Planet terrains.
Huge Endeavour crater spans some 22 kilometers (14 miles) in diameter.
Throughout 2016 Opportunity was investigating the ancient, weathered slopes around the Marathon Valley location in Endeavour crater. The area became a top priority science destination after the slopes were found to hold a motherlode of ‘smectite’ clay minerals based on data from the CRISM spectrometer circling overhead aboard a NASA Mars orbiter.
The smectites were discovered via extensive, specially targeted Mars orbital measurements gathered by the CRISM (Compact Reconnaissance Imaging Spectrometer for Mars) spectrometer on NASA’s Mars Reconnaissance Orbiter (MRO) – accomplished earlier at the direction of Arvidson.
Opportunity was descending down Marathon Valley the past year to investigate the clay minerals formed in water. They are key to helping determine the habitability of the Red Planet when it was warmer and wetter billions of years ago.
What did Opportunity accomplish scientifically at Marathon Valley during 2016?
“Key here is the more extensive aqueous alteration within fractures and more mild alteration within the bedrock outcrops,” Arvidson explained to me.
“Fractures have red pebbles enhanced in Al and Si (likely by leaching out more soluble elements), hematite, and in the case of our scuffed fracture, enhanced sulfate content with likely Mg sulfates and other phases. Also the bedrock is enriched in Mg and S relative to other Shoemaker rocks and these rocks are the smectite carrier as observed from CRISM ATO data.”
Marathon Valley measures about 300 yards or meters long. It cuts downhill through the west rim of Endeavour crater from west to east – the same direction in which Opportunity drove downhill from a mountain summit area atop the crater rim.
Opportunity has been exploring Endeavour since arriving at the humongous crater in 2011. Endeavour crater was formed when it was carved out of the Red Planet by a huge meteor impact billions of years ago.
“Endeavour crater dates from the earliest Martian geologic history, a time when water was abundant and erosion was relatively rapid and somewhat Earth-like,” explains Larry Crumpler, a science team member from the New Mexico Museum of Natural History & Science.
Opportunity has been climbing up very steep and challenging slopes to reach the top of the crater rim. Then she will drive south to Cape Byron and the gully system.
“We have had some mobility issues climbing steep, rocky slopes. Lots of slipping and skidding, but evaluating the performance of the rover on steep, rocky and soil-covered slopes was one of the approved extended mission objectives,” Arvidson explained.
“We are heading out of Cape Tribulation, driving uphill to the southwest to reach the Meridiani plains and then to drive to the western side of Cape Byron to the head of a gully system.”
What’s ahead for 2017? What’s the importance of exploring the gully?
“Finish up work on Cape Tribulation, traverse to the head of the gully system and head downhill into one or more of the gullies to characterize the morphology and search for evidence of deposits,” Arvidson elaborated.
“Hopefully test among dry mass movements, debris flow, and fluvial processes for gully formation. The importance is that this will be the first time we will acquire ground truth on a gully system that just might be formed by fluvial processes. Will search for cross bedding, gravel beds, fining or coarsening upward sequences, etc., to test among hypotheses.”
How long will it take to reach the gully?
“Months to the gully,” replied Arvidson. After arriving at the top of the crater rim, the rover will actually drive part of the way on the Martian plains again during the southward trek to the gully.
“And we will be driving on the plains to drive relatively long distances with an intent of getting to the gully well before the winter season.”
As of today, Jan 31, 2017, long lived Opportunity has survived 4630 Sols (or Martian days) roving the harsh environment of the Red Planet.
Opportunity has taken over 216,700 images and traversed over 27.26 miles (43.87 kilometers) – more than a marathon.
NASA’s Opportunity rover discovers a beautiful Martian dust devil moving across the floor of Endeavour crater as wheel tracks show robots path today exploring the steepest ever slopes of the 13 year long mission, in search of water altered minerals at Knudsen Ridge inside Marathon Valley on 1 April 2016. This navcam camera photo mosaic was assembled from raw images taken on Sol 4332 (1 April 2016) and colorized. Credit: NASA/JPL/Cornell/ Ken Kremer/kenkremer.com/Marco Di Lorenzo
See our updated route map below. It shows the context of the rovers over 13 year long traverse spanning more than the 26 mile distance of a Marathon runners race.
The rover surpassed the 27 mile mark milestone on November 6, 2016 (Sol 4546).
The power output from solar array energy production is currently 416 watt-hours, before heading into another southern hemisphere Martian winter in 2017. It will count as Opportunities 8th winter on Mars.
Meanwhile Opportunity’s younger sister rover Curiosity traverses and drills into the lower sedimentary layers at the base of Mount Sharp.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
13 Year Traverse Map for NASA’s Opportunity rover from 2004 to 2017. This map shows the entire 43 kilometer (27 mi) path the rover has driven on the Red Planet during more than 13 years and more than a marathon runners distance for over 4614 Sols, or Martian days, since landing inside Eagle Crater on Jan 24, 2004 – to current location at the western rim of Endeavour Crater. After descending down Marathon Valley and after studying Spirit Mound, the rover is now ascending back uphill on the way to a Martian water carved gully. Rover surpassed Marathon distance on Sol 3968 after reaching 11th Martian anniversary on Sol 3911. Opportunity discovered clay minerals at Esperance – indicative of a habitable zone – and searched for more at Marathon Valley. Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer/kenkremer.com
This self-portrait of NASA's Curiosity Mars rover shows the vehicle at the "Big Sky" site. Credit: NASA/JPL-Caltech/MSSS
Following is the final excerpt from my new book, “Incredible Stories From Space: A Behind-the-Scenes Look at the Missions Changing Our View of the Cosmos.” The book is an inside look at several current NASA robotic missions, and this excerpt is part 3 of 3 posted here on Universe Today, of Chapter 2, “Roving Mars with Curiosity.” You can read Part 1 here, and Part 2 here. The book is available in print or e-book (Kindle or Nook) Amazon and Barnes & Noble.
How to Drive a Mars Rover
How does Curiosity know where and how to drive across Mars’ surface? You might envision engineers at JPL using joysticks, similar to those used for remote control toys or video games. But unlike RC driving or gaming, the Mars rover drivers don’t have immediate visual inputs or a video screen to see where the rover is going. And just like at the landing, there is always a time delay of when a command is sent to the rover and when it is received on Mars.
“It’s not driving in a real-time interactive sense because of the time lag,” explained John Michael Morookian, who leads the team of rover drivers.
The actual job title of Morookian and his team are ‘Rover Planners,’ which precisely describes what they do. Instead of ‘driving’ the rovers per se; they plan out the route in advance, program specialized software, and upload the instructions to Curiosity.
“We use images taken by the rover of its surroundings,” said Morookian. “We have a set of stereo images from four black-and-white Navigation Cameras, along with images from the Hazcams (hazard avoidance cameras), supported by high-resolution color images from the MastCam that give us details about the nature of the terrain ahead and clues about types of rocks and minerals at the site. This helps identify structures that look interesting to the scientists.”
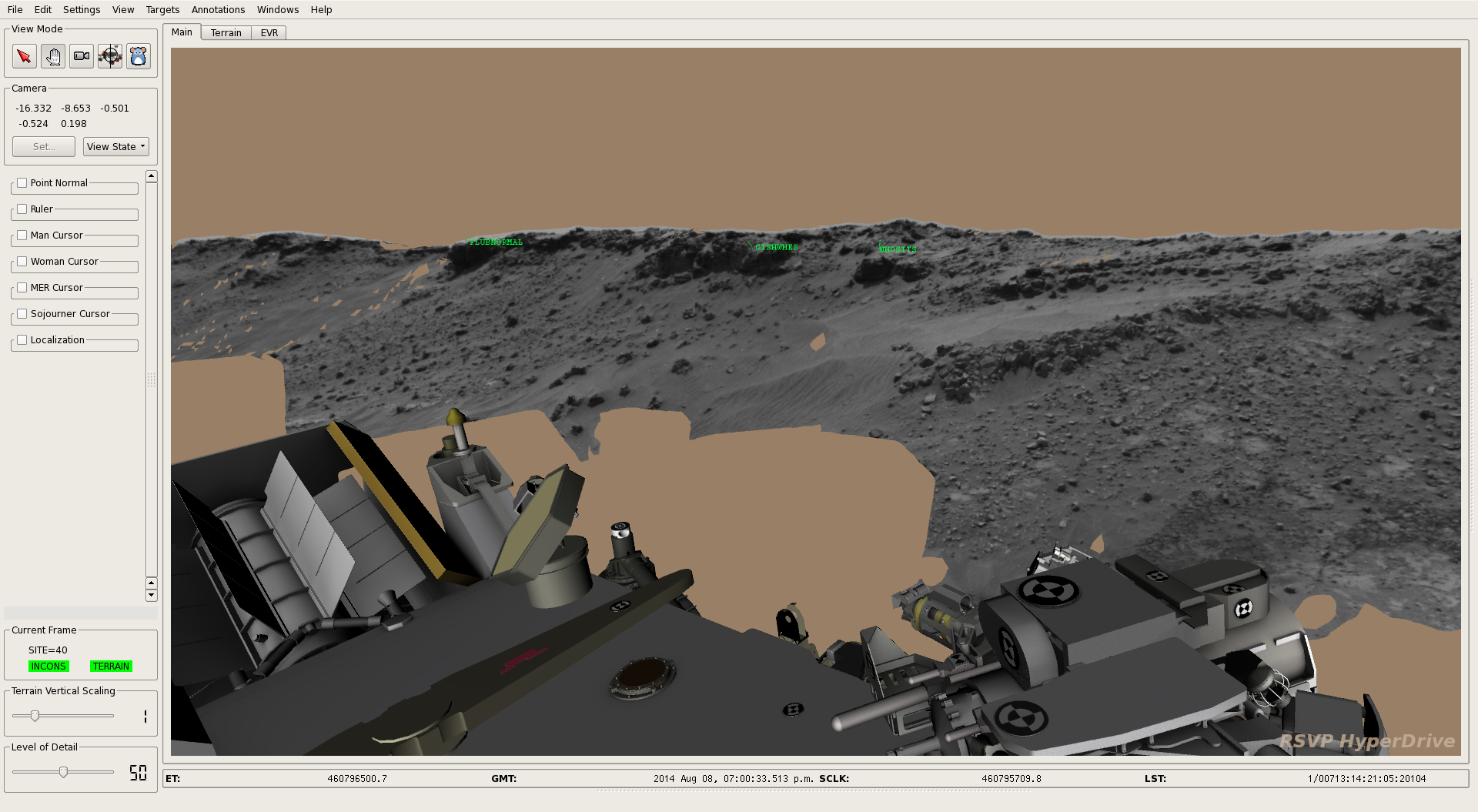
Using all available data, they can create a three-dimensional visualization of the terrain with specialized software called the Rover Sequencing and Visualization Program (RSVP).
“This is basically a Mars simulator and we put a simulated Curiosity in a panorama of the scene to visualize how the rover could traverse on its path,” Morookian explained. “We can also put on stereo glasses, which allow our eyes to see the scene in three dimensions as if we were there with the rover.
In virtual reality, the rover drivers can manipulate the scene and the rover to test every possibility of which routes are the best and what areas to avoid. There, they can make all the mistakes (get stuck in a dune, tip the rover, crash into a big rock, drive off a precipice) and perfect the driving sequence while the real rover remains safe on Mars.
“The scientists also review the images for features that are interesting and consult with the Rover Planners to help define a path. Then we compose the detailed commands that are necessary to get Curiosity from Point A to Point B along that path,” Morookian said. “”We can also incorporate the commands needed to give the rover direction to make contact with the site using its robotic arm.”
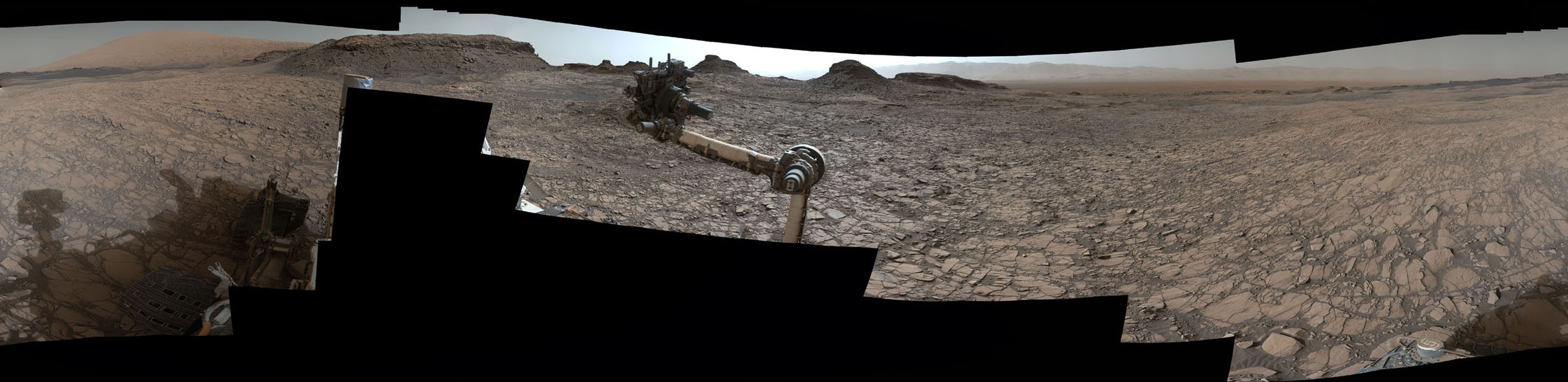
When Curiosity’s Navigation Cameras (Navcams) take black-and-white images and send them back to Earth each day, rover planners combine them with other rover data to create 3D terrain models. By adding a computerized 3D rover model to the terrain model, rover planners can understand better the rover’s position, as well as distances to, and scale of, features in the landscape. Credit: NASA/JPL-Caltech.
So, every night the rover is commanded to shut down for eight hours to recharge its batteries with the nuclear generator. But first Curiosity sends data to Earth, including pictures of the terrain and any science information. On Earth, the Rover Planners take that data, do their planning work, complete the software programing and beam the information back to Mars. Then Curiosity wakes up, downloads the instructions and sets to work. And the cycle repeats.
Curiosity also has an AutoNav feature which allows the rover to traverse areas the team hasn’t seen yet in images. So, it could go over the hill and down the other side to uncharted territory, with the AutoNav sensing potential hazards.
“We don’t use it too often because it is computationally expensive, meaning it takes much longer for the rover to operate in that mode,” Morookian said. “We often find it’s a better trade to just come in the next day, look at the images and drive as far as we can see.”
A view of the Space Flight Operations Facility at the Jet Propulsion Laboratory, where all the data going both to and from all planetary missions is sent and received via the Deep Space Network. Credit: Nancy Atkinson.
As Morookian showed me the various rooms used by rover planning teams at JPL, he explained how they need to operate over a number of different timescales.
“We not only have the daily route planning,” he said, “but also do long-range strategic planning using orbital imagery from the HiRISE camera on the Mars Reconnaissance Orbiter and choose paths based on features seen from orbit. Our team works strategically, looking many months out to define the best paths.”
Another process called Supra-Tactical looks out to just the next week. This involves science planners managing and refining the types of activities the rover will be doing in the short term. Also, since no one on the team lives on Mars Time anymore, on Fridays the Rover Planners work out the plans for several days.
“Since we don’t work weekends, Friday plans contain multiple sols of activities,” Morookian said. “Two parallel teams decide which days the rover will drive and which days it will do other activities, such as work with the robotic arm or other instruments.”
The data that comes down from the rover over the weekend is monitored, however, and if there is a problem, a team is called in to do a more detailed assessment. Morookian indicated they’ve had to engage the emergency weekend team several times, but so far there have been no serious problems. “It does keep us on our toes, however,” he said.
The rover features a number of reactive safety checks on the amount of overall tilt of the rover deck and the articulation of the suspension system of the wheels, so if the rover is going over an object that is too large, it will automatically stop.
Curiosity wasn’t built for speed. It was designed to travel up to 660 feet (200 meters) in a day, but it rarely travels that far in a Sol. By early 2016 the rover had driven a total of about 7.5 miles (12 km) across Mars’ surface.
This image shows a close-up of track marks left by the Curiosity rover. Holes in the rover’s wheels, seen here in this view, leave imprints in the tracks that can be used to help the rover drive more accurately. The imprint is Morse code for ‘JPL,’ and aids in tracking how far the rover has traveled. Credit: NASA/JPL-Caltech.
There are several ways to determine how far Curiosity has traveled, but the most accurate measurement is called ‘Visual Odometry.’ Curiosity has specialized holes in its wheels in the shape of Morse code letters, spelling out ‘JPL’ – a nod to the home of the rover’s science and engineering teams – across the Martian soil.
“Visual odometry works by comparing the most recent pair of stereo images collected roughly every meter over the drive,” said Morookian. “Individual features in the scene are matched and tracked to provide a measure of how the camera (and thus the rover) has translated and rotated in 3 dimensional space between the two images and it tells us in a very real sense how far Curiosity has gone.”
Careful inspection of the rover tracks can reveal the type of traction the wheels have and if they have slipped, for instance due to high slopes or sandy ground.
Unfortunately, Curiosity now has new holes in its wheels that aren’t supposed to be there.
Rover Problems
Morookian and Project Scientist Ashwin Vasavada both expressed relief and satisfaction that overall — this far into the mission — Curiosity is a fairly healthy rover. The entire science payload is currently operating at nearly full capability. But the engineering team keeps an eye on a few issues.
“Around sol 400, we realized the wheels were wearing faster than we expected,” Vasavada said.
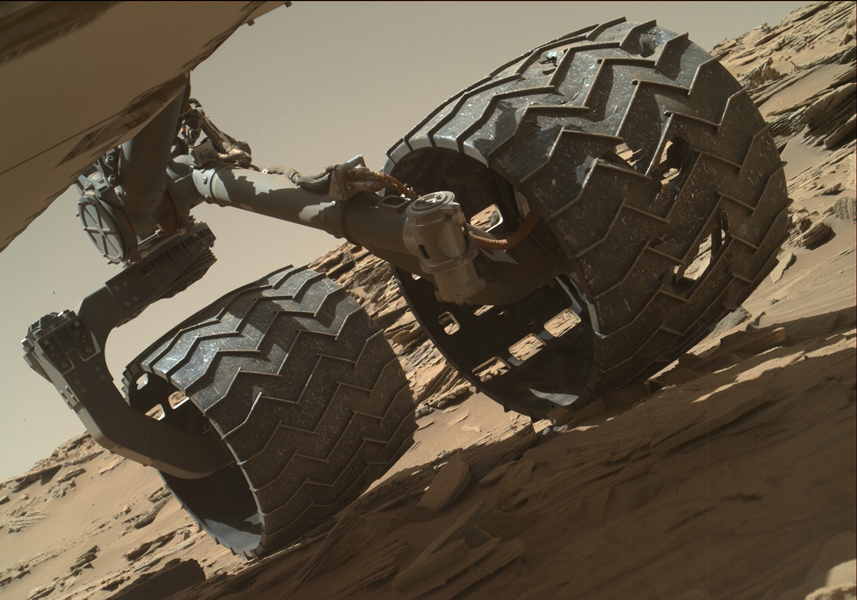
The team operating the Curiosity Mars rover uses the Mars Hand Lens Imager (MAHLI) camera on the rover’s arm to check the condition of the wheels at routine intervals. This image of Curiosity’s left-middle and left-rear wheels is part of an inspection set taken on April 18, 2016, during the 1,315th sol of the rover’s work on Mars. Credit: NASA/JPL-Caltech/MSSS.
And the wear didn’t consist of just little holes; the team started to see punctures and nasty tears. Engineers realized the holes were being created by the hard, jagged rocks the rover was driving over during that time.
“We weren’t fully expecting the kind of ‘pointy’ rocks that were doing damage,” Vasavada said. “We also did some testing and saw how one wheel could push another wheel into a rock, making the damage worse. We now drive more carefully and don’t drive as long as we have in the past. We’ve been able to level off the damage to a more acceptable rate.”
Early in the mission, Curiosity’s computer went into ‘safe mode’ several times, as Curiosity’s software recognized a problem, and the response was to disallow further activity and phone home.
Specialized fault protection software runs throughout the modules and instruments, and when a problem occurs, the rover stops and sends data called ‘event records’ to Earth. The records include various categories of urgency, and in early 2015, the rover sent a message that essentially said, “This is very, very bad.” The drill on the rover’s arm had experienced a fluctuation in an electrical current – like a short circuit.
“Curiosity’s software has the ability to detect shorts, like the ground fault circuit interrupter you have in your bathroom,” Morookian explained, “except this one tells you ‘this is very, very bad’ instead of just giving you a yellow light.”
Since the team can’t go to Mars and repair a problem, everything is fixed either by sending software updates to the rover or by changing operational procedures.
Curiosity’s drill in the turret of tools at the end of the robotic arm positioned in contact with the rock surface for the first drilling of the mission on the 170th sol of Curiosity’s work on Mars (Jan. 27, 2013) in Yellowknife Bay. The picture was taken by the front Hazard-Avoidance Camera (Hazcam). Image credit: NASA/JPL-Caltech.
“We are just more careful now with how we use the drill,” Vasavada said, “and don’t drill with full force at the beginning, but slowly ramp up. It’s sort of like how we drive now, more gingerly but it still gets the job done. It hasn’t been a huge impact as of yet.”
A lighter touch on the drill also was necessary for the softer mudstones and sandstones the rover encountered. Morookian said there was concern the layered rocks might not hold up under the assault of the standard drilling protocol, and so they adjusted the technique to use the lowest ‘settings’ that still allows the drill to make sufficient progress into the rock.
But opportunities to use the drill are increasing as Curiosity begins its traverse up the mountain. The rover is traveling through what Vasavada calls a “target rich, very interesting area,” as the science team works to tie together the geological context of everything they are seeing in the images.
Finding Balance on Mars
While the diversion at Yellowknife Bay allowed the team to make some major discoveries, they felt pressure to get to Mt. Sharp, so “drove like hell for a year,” Vasavada said.
Now on the mountain, there is still the pressure to make the most of the mission, with the goal of making it through at least four different rock units – or layers — on Mt. Sharp. Each layer could be like a chapter in the book of Mars’ history.
A portion of a panorama from Curiosity’s Mastcam shows the rugged surface of ‘Naukluft Plateau’ plus part of the rim of Gale Crater, taken on April 4, 2016 or Sol 1301. Credit: NASA/JPL-Caltech/MSSS
“Exploring Mt. Sharp is fascinating,” Vasavada said, “and we’re trying to maintain a mix between really great discoveries, which – you hate to say — slows us down, and getting higher on the mountain. Looking closely at a rock in front of you means you’ll never be able to go over and look at that other interesting rock over there.”
Vasavada and Morookian both said it’s a challenge to preserve that balance every day — to find what’s called the ‘knee in the curve’ or ‘sweet spot’ of the perfect optimization between driving and stopping for science.
Then there’s the balance between stopping to do a full observation with all the instruments and doing ‘flyby science’ where less intense observations are made.
“We take the observations we can, and generate all the hypotheses we can in real time,” Vasavada said. “Even if we’re left with 100 open questions, we know we can answer the questions later as long as we know we’ve taken enough data.”
Curiosity’s primary target is not the summit, but instead a region about 1,330 feet (400 meters) up where geologists expect to find the boundary between rocks that saw a lot of water in their history, and those that didn’t. That boundary will provide insight into Mars’ transition from a wet planet to dry, filling in a key gap in the understanding of the planet’s history.
he Curiosity rover recorded this view of the Sun setting at the close of the mission’s 956th sol (April 15, 2015), from the rover’s location in Gale Crater. This was the first sunset observed in color by Curiosity. The image comes from the left-eye camera of the rover’s Mast Camera (Mastcam). Credit: NASA/JPL-Caltech/MSSS/Texas A&M University.
No one really knows how long Curiosity will last, or if it will surprise everyone like its predecessors Spirit and Opportunity. Having made it past the ‘prime mission’ of one year on Mars (two Earth years), and now in the extended mission, the one big variable is the RTG power source. While the available power will start to steadily decrease, both Vasavada and Morookian don’t expect that to be in an issue for at least four more Earth years, and with the right “nurturing,” power could last for a dozen years or more.
But they also know there’s no way to predict how long Curiosity will go, or what unexpected event might end the mission.
The Beast
Does Curiosity have a personality like the previous Mars rovers?
“Actually no, we don’t seem to anthropomorphize this rover like people did with Spirit and Opportunity,” Vasavada said. “We haven’t bonded emotionally with it. Sociologists have actually been studying this.” He shook his head with an amused smile.
Vasavada indicated it might have something to do with Curiosity’s size.
“I think of it as a giant beast,” he said straight-faced. “But not in a mean way at all.”
Curiosity appears to be photobombing Mount Sharp in this selfie image, a mosaic created from several MAHLI images. Credit: NASA/JPL-Caltech/MSSS/Edited by Jason Major.
What has come to come to characterize this mission, Vasavada said, is the complexity of it, in every dimension: the human component of getting 500 people to work and cooperate together while optimizing everyone’s talents; keeping the rover safe and healthy; and keeping ten instruments going every day, which are sometimes doing completely unrelated science tasks.
“Every day is our own little ‘seven minutes of terror,’ where so many things have to go right every single day,” Vasavada said. “There are a million potential issues and interactions, and you have to constantly be thinking about all the ways things can go wrong, because there are a million ways you can mess up. It’s an intricate dance, but fortunately we have a great team.”
Then he added with a smile, “This mission is exciting though, even if it’s a beast.”
“Incredible Stories From Space: A Behind-the-Scenes Look at the Missions Changing Our View of the Cosmos” is published by Page Street Publishing, a subsidiary of Macmillan.
Author Nancy Atkinson at JPL with a model of the Curiosity Rover.
The 6th annual pumpkin carving at the Jet Propulsion Laboratory included this 'Mars sample return pumpkin.' Credit: JPL.
Every workplace should have this much fun! A group of engineers at the Jet Propulsion Laboratory held their sixth annual pumpkin carving contest, and this year’s entries did not disappoint. Using a combination of engineering savvy and creative license, the JPL engineers carved up several different types of themed pumpkins, including a cow abduction by aliens, a geyser-spewing Europa, unique depictions of several different space missions and much more.
Dramatic wide angle mosaic view of butte with sandstone layers showing cross-bedding in the Murray Buttes region on lower Mount Sharp with distant view to rim of Gale crater, taken by Curiosity rover’s Mastcam high resolution cameras. This photo mosaic was assembled from Mastcam color camera raw images taken on Sol 1454, Sept. 8, 2016 and stitched by Ken Kremer and Marco Di Lorenzo, with added artificial sky. Featured at APOD on 5 Oct 2016. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Dramatic wide angle mosaic view of butte with sandstone layers showing cross-bedding in the Murray Buttes region on lower Mount Sharp with distant view to rim of Gale crater, taken by Curiosity rover’s Mastcam high resolution cameras. This photo mosaic was assembled from Mastcam color camera raw images taken on Sol 1454, Sept. 8, 2016 and stitched by Ken Kremer and Marco Di Lorenzo, with added artificial sky. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Our beyond magnificent Curiosity rover has just finished her latest Red Planet drilling campaign – at the rock target called “Quela” – into the simply unfathomable alien landscapes she is currently exploring at the “Murray Buttes” region of lower Mount Sharp. And it’s all in a Sols (or Martian Day’s) work for our intrepid Curiosity!
“These images are literally out of this world.. I don’t think I have seen anything like them on Earth!” Jim Green, Planetary Sciences Director at NASA Headquarters, Washington, D.C., explained to Universe Today.
The “Murray Buttes” region is just chock full of the most stunning panoramic vistas that NASA’s Curiosity Mars Science Laboratory rover has come upon to date. Observe and enjoy them in our exclusive new photo mosaics above and below.
“We always try to find some sort of Earth analog but these make exploring another world all worth it!” Green gushed in glee.
They fill the latest incredible chapter in her thus far four year long quest to trek many miles (km) from the Bradbury landing site across the floor of Gale Crater to reach the base region of humongous Mount Sharp.
And these adventures are just a prelude to the even more glorious vistas she’ll investigate from now on – as she climbs higher and higher on an expedition to thoroughly examine the mountains sedimentary layers and unravel billions and billions of years of Mars geologic and climatic history.
Drilling holes into Mars during the Red Planet trek and carefully analyzing the pulverized samples with the rovers pair of miniaturized chemistry laboratories (SAM and CheMin) is the route to the answer of how and why Mars changed from a warmer and wetter planet in the ancient past to the cold, dry and desolate world we see today.
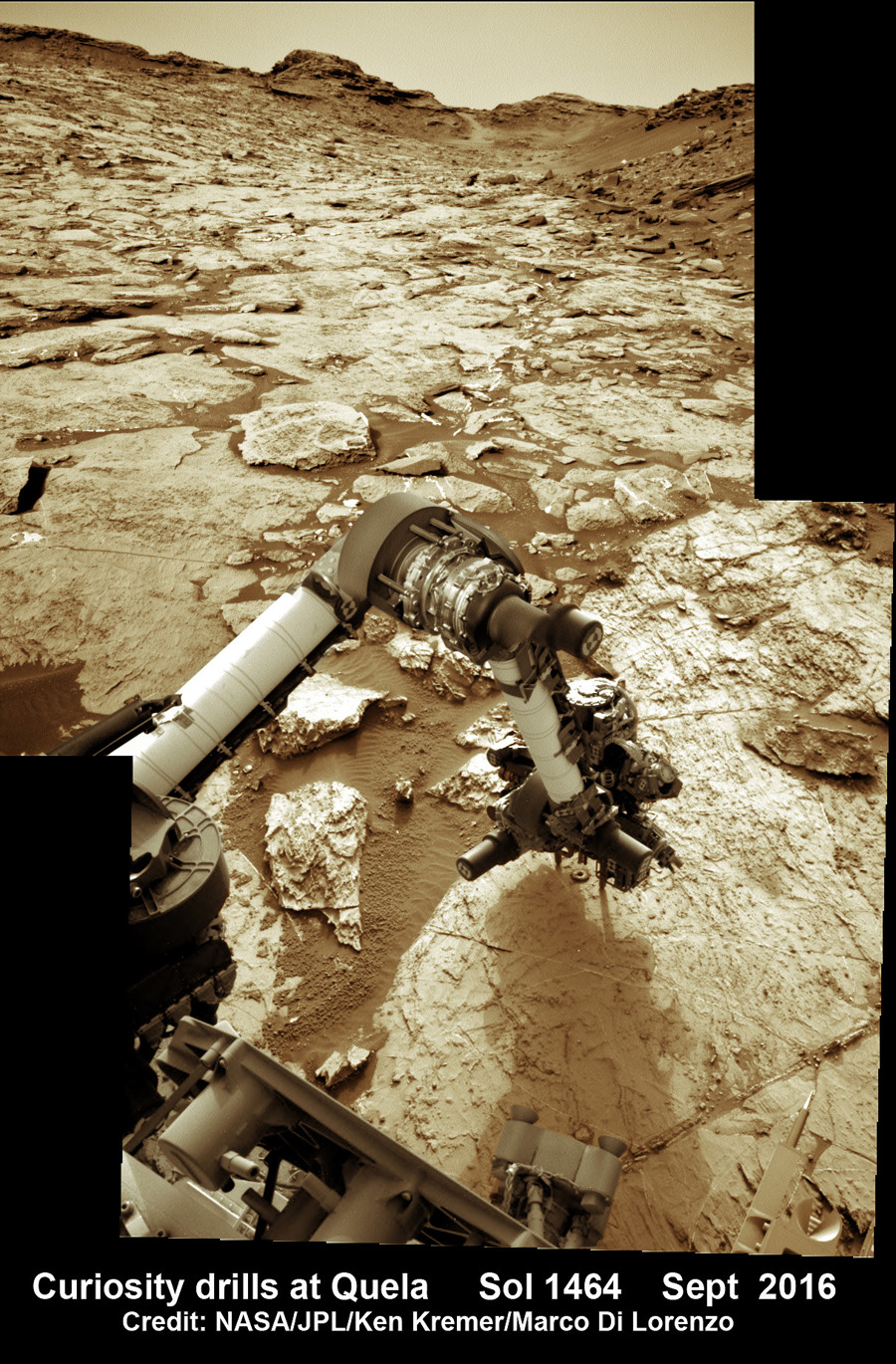
The rock target named “Quela” is located at the base of one of the buttes dubbed “Murray Butte number 12,” according to the latest mission update from Prof. John Bridges, a Curiosity rover science team member from the University of Leicester, England.
It took two tries to get the drilling done due to a technical issue, but all went well in the end and it was well worth the effort at a place never before explored by an emissary from Earth.
“The drill (successful at second attempt) is at Quela.”
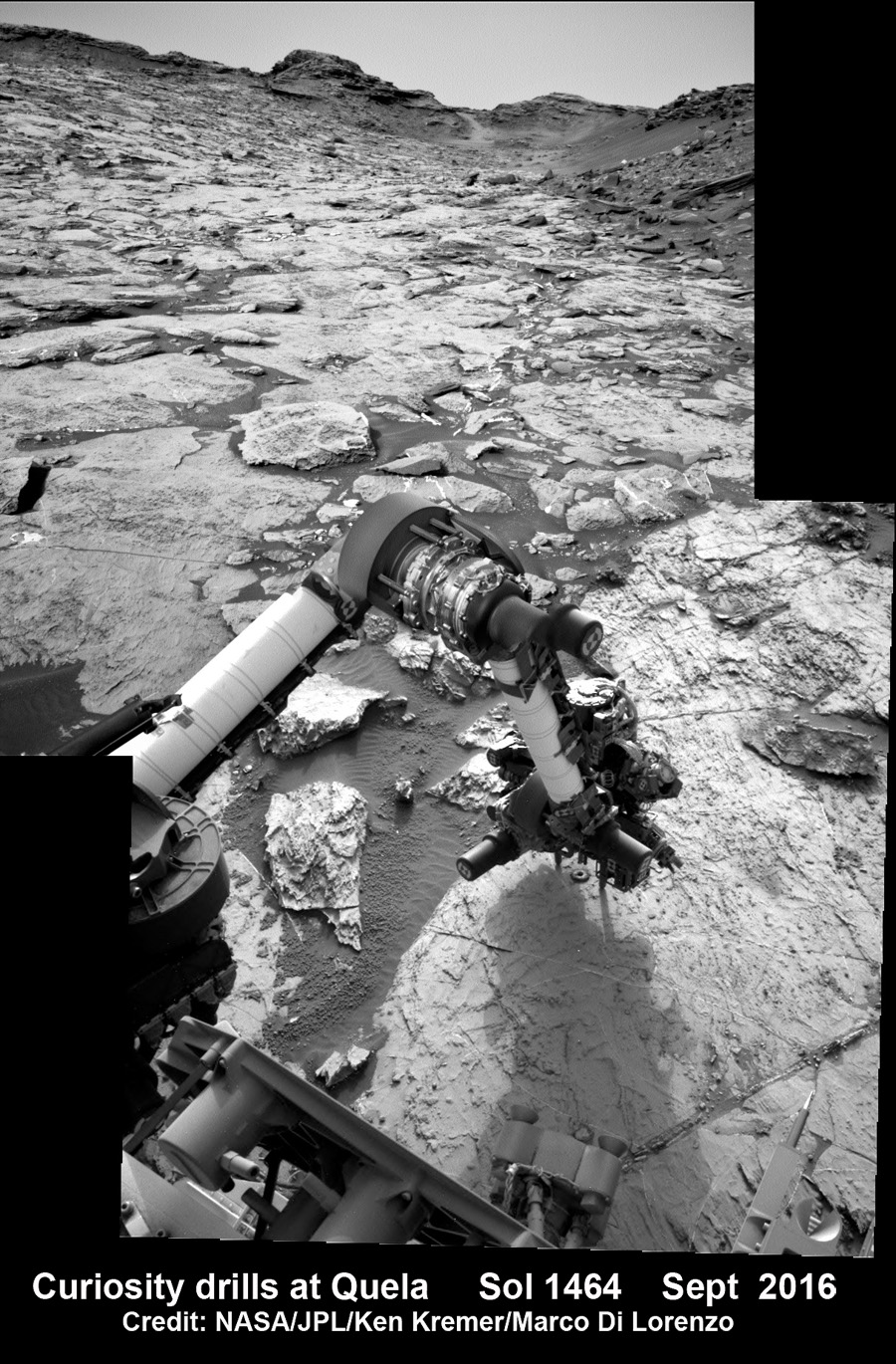
The full depth drilling was completed on Sol 1464, Sept. 18, 2016 using the percussion drill at the terminus of the outstretched 7-foot-long (2-meter-long) robotic arm – as confirmed by imaging and further illustrated in our navcam camera photo mosaic.
And that immediately provided valuable insight into climate change on Mars.
“You can see how red and oxidised the tailings are, suggesting changing environmental conditions as we progress through the Mt. Sharp foothills,” Bridges explained in the mission update.
Curiosity bore holes measure approximately 0.63 inch (1.6 centimeters) in diameter and 2.6 inches (6.5 centimeters) deep.
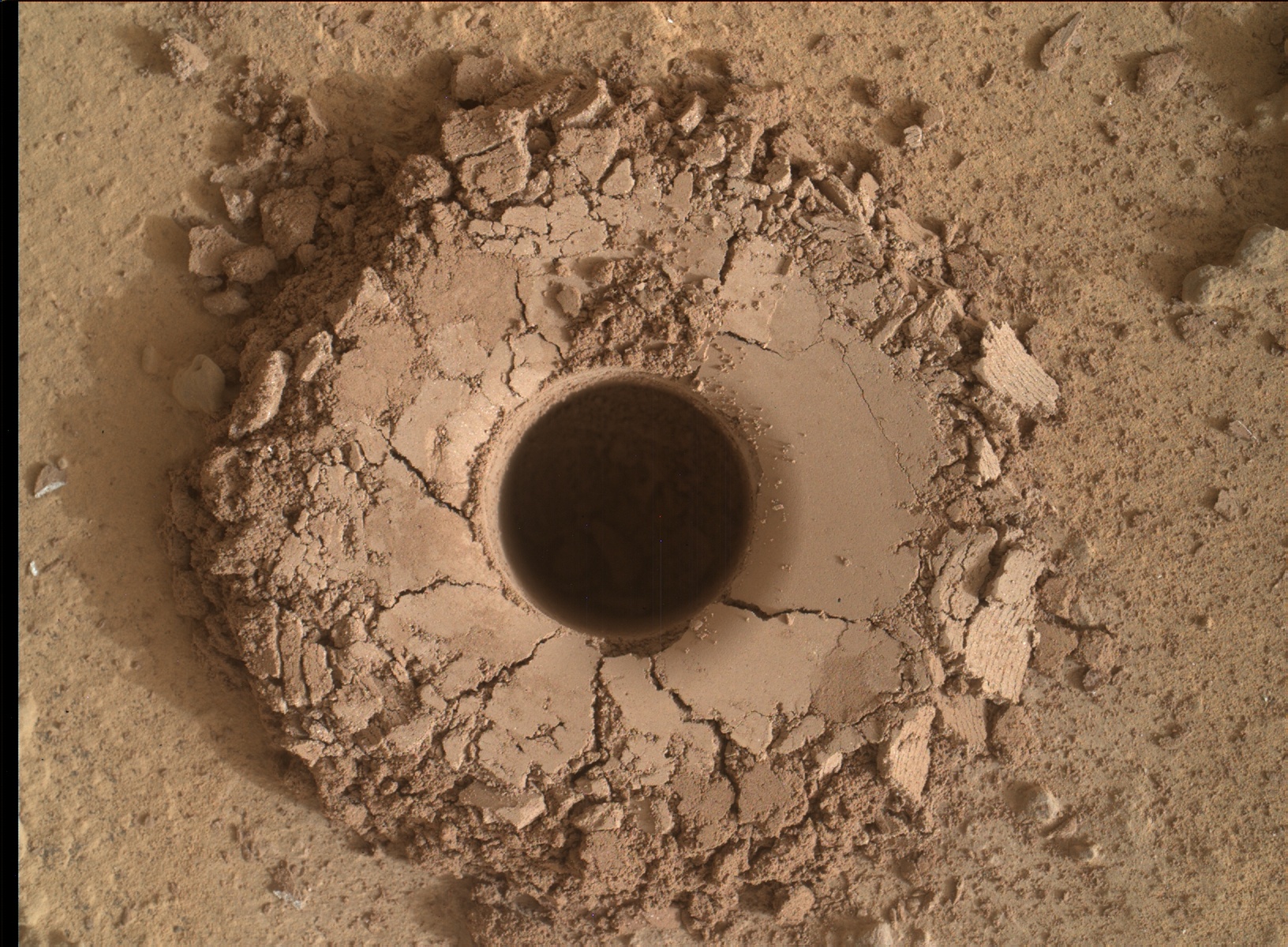
Quela drill hole bored by Curiosity rover on Sol 1464, Sept. 18, 2016 as seen in this collage of Mastcam and MAHLI raw color images taken on Sol 1465. Image Credit: NASA/JPL/MSSS. Collage: Marco Di Lorenzo/Ken Kremer
To give you the context of the Murray Buttes region and the drilling at Quela, the image processing team of Ken Kremer and Marco Di Lorenzo has begun stitching together wide angle mosaic landscape views and up close views of the drilling using raw images from the variety of cameras at Curiosity’s disposal.
The next steps after boring into Quela were to “sieve the new sample, dump the unsieved fraction, and drop some of the sieved sample into CheMin,” says Ken Herkenhoff, Research Geologist at the USGS Astrogeology Science Center and an MSL science team member, in a mission update.
“But first, ChemCam will acquire passive spectra of the Quela drill tailings and use its laser to measure the chemistry of the wall of the new drill hole and of bedrock targets “Camaxilo” and “Okakarara.” Right Mastcam images of these targets are also planned.”
“After sunset, MAHLI will use its LEDs to take images of the drill hole from various angles and of the CheMin inlet to confirm that the sample was successfully delivered. Finally, the APXS will be placed over the drill tailings for an overnight integration.”
The rover had approached the butte from the south side several sols earlier to get in place, plan for the drilling, take imagery to document stratigraphy and make compositional observations with the ChemCam laser instrument.
Curiosity drills into Quela rock target in the Murray Buttes region on Sol 1464, Sept. 18, 2016, in this navcam camera mosaic, stitched from raw images and colorized. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
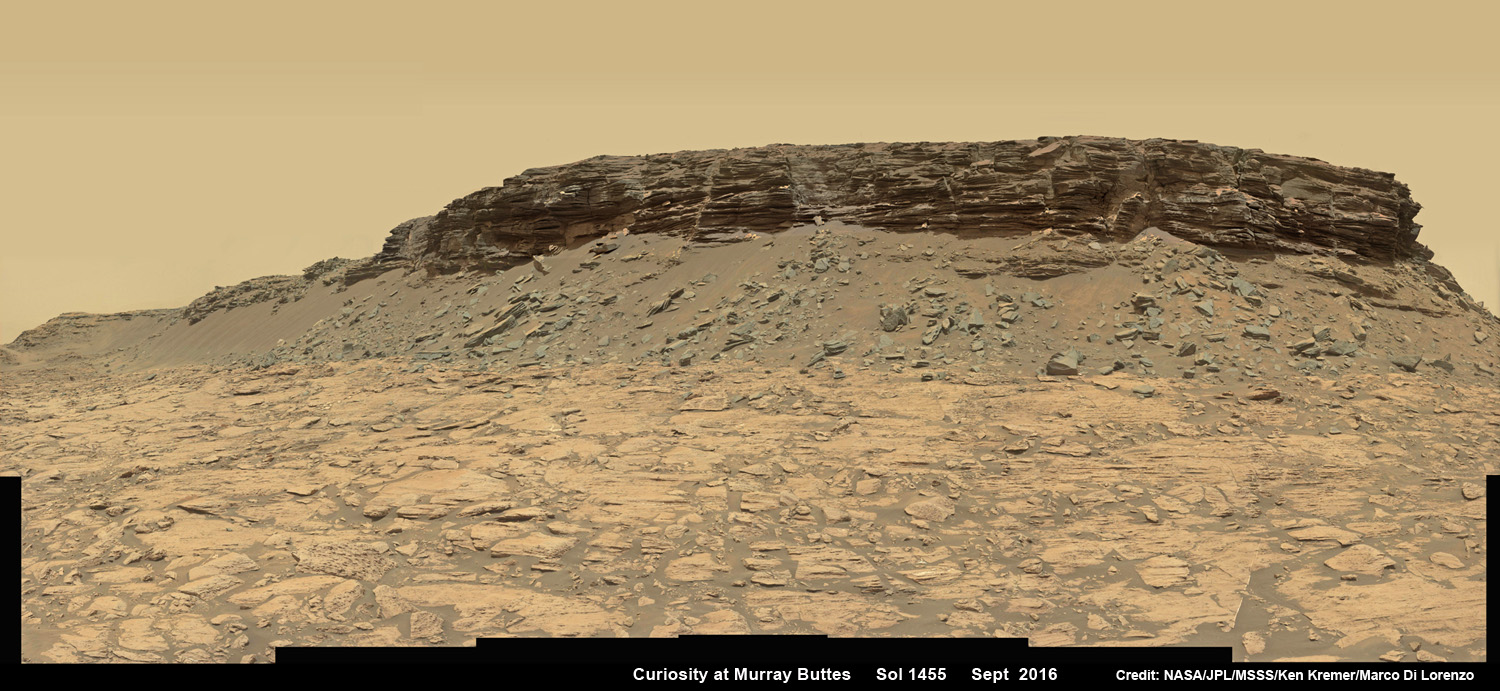
“These are the landforms that dominate the landscape at this point in the traverse – The Murray Buttes,” says Bridges.
Wide angle mosaic view shows spectacular buttes and layered sandstone in the Murray Buttes region on lower Mount Sharp from the Mastcam cameras on NASA’s Curiosity Mars rover. This photo mosaic was assembled from Mastcam color camera raw images taken on Sol 1455, Sept. 9, 2016 and stitched by Marco Di Lorenzo and Ken Kremer, with added artificial sky. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
What are the Murray Buttes?
“These are formed by a cap of hard aeolian rock that has been partially eroded back, overlying the Murray mudstone.”
The imagery of the Murray Buttes and mesas show them to be eroded remnants of ancient sandstone that originated when winds deposited sand after lower Mount Sharp had formed.
Scanning around the Murray Buttes mosaics one sees finely layered rocks, sloping hillsides, the distant rim of Gale Crater barely visible through the dusty haze, dramatic hillside outcrops with sandstone layers exhibiting cross-bedding.
The presence of “cross-bedding” indicates that the sandstone was deposited by wind as migrating sand dunes, says the team.
Spectacular wide angle mosaic view showing sloping buttes and layered outcrops within the Murray Buttes region on lower Mount Sharp from the Mast Camera (Mastcam) on NASA’s Curiosity Mars rover. This photo mosaic is stitched from Mastcam camera raw images taken on Sol 1454, Sept. 9, 2016 with added artificial sky. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Curiosity spent some six weeks or so traversing and exploring the Murray Buttes.
So after collecting all that great drilling data at Quela, the team is ready for even more spectacular new adventures!
“While the Murray Buttes were spectacular and interesting, it’s good to be back on the road again, as there is much more of Mt. Sharp to explore!” concludes Herkenhoff.
And the team is already commanding Curiosity to drive ahead in hot pursuit of the next drill target!
Dramatic hillside view showing sloping buttes and layered outcrops within of the Murray Buttes region on lower Mount Sharp from the Mast Camera (Mastcam) on NASA’s Curiosity Mars rover. This photo mosaic is stitched and cropped from Mastcam camera raw images taken on Sol 1454, Sept. 8, 2016, with added artificial sky. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Ascending and diligently exploring the sedimentary lower layers of Mount Sharp, which towers 3.4 miles (5.5 kilometers) into the Martian sky, is the primary destination and goal of the rovers long term scientific expedition on the Red Planet.
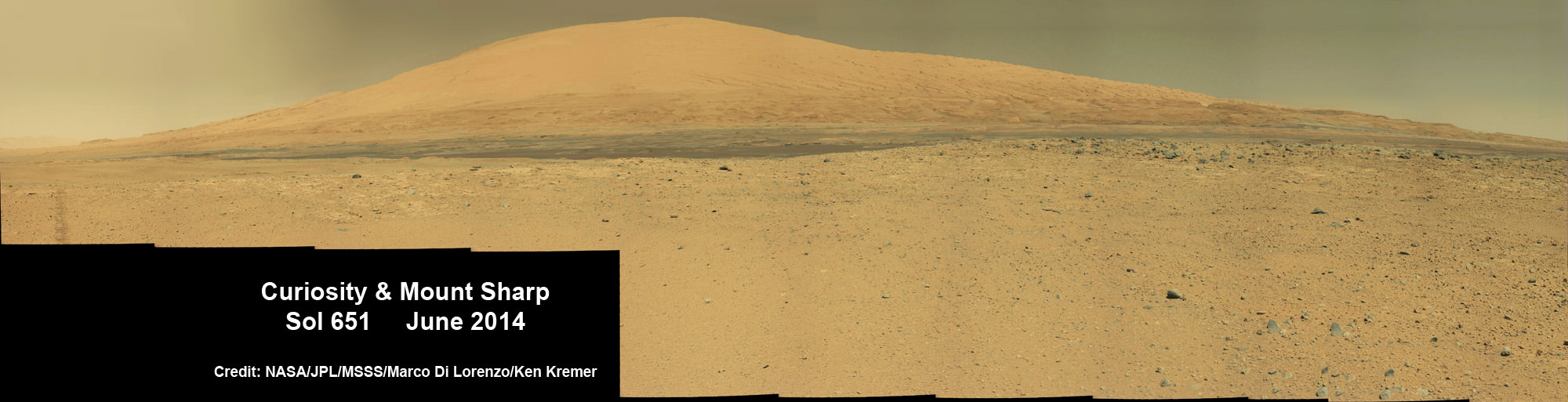
Curiosity rover panorama of Mount Sharp captured on June 6, 2014 (Sol 651) during traverse inside Gale Crater. Note rover wheel tracks at left. She will eventually ascend the mountain at the ‘Murray Buttes’ at right later this year. Assembled from Mastcam color camera raw images and stitched by Marco Di Lorenzo and Ken Kremer. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer-kenkremer.com
Three years ago, the team informally named the Murray Buttes site to honor Caltech planetary scientist Bruce Murray (1931-2013), a former director of NASA’s Jet Propulsion Laboratory, Pasadena, California. JPL manages the Curiosity mission for NASA.
As of today, Sol 1470, September 24, 2016, Curiosity has driven over 7.9 miles (12.7 kilometers) since its August 2012 landing inside Gale Crater, and taken over 355,000 amazing images.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
Wide angle mosaic shows lower region of Mount Sharp at center in between spectacular sloping hillsides and layered rock outcrops of the Murray Buttes region in Gale Crater as imaged by the Mast Camera (Mastcam) on NASA’s Curiosity Mars rover. This photo mosaic is stitched from Mastcam camera raw images taken on Sol 1451, Sept. 5, 2016 with added artificial sky. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Quela drill hole bored by Curiosity rover on Sol 1464, Sept. 18, 2016 as seen in this MAHLI arm camera raw color image taken the same Sol. Credit: NASA/JPL/MSSS
Curiosity drills into Quela rock target on Sol 1464, Sept. 18, 2016 in this navcam camera mosaic. Credit: NASA/JPL/Ken Kremer/kenkremer.com/Marco Di Lorenzo
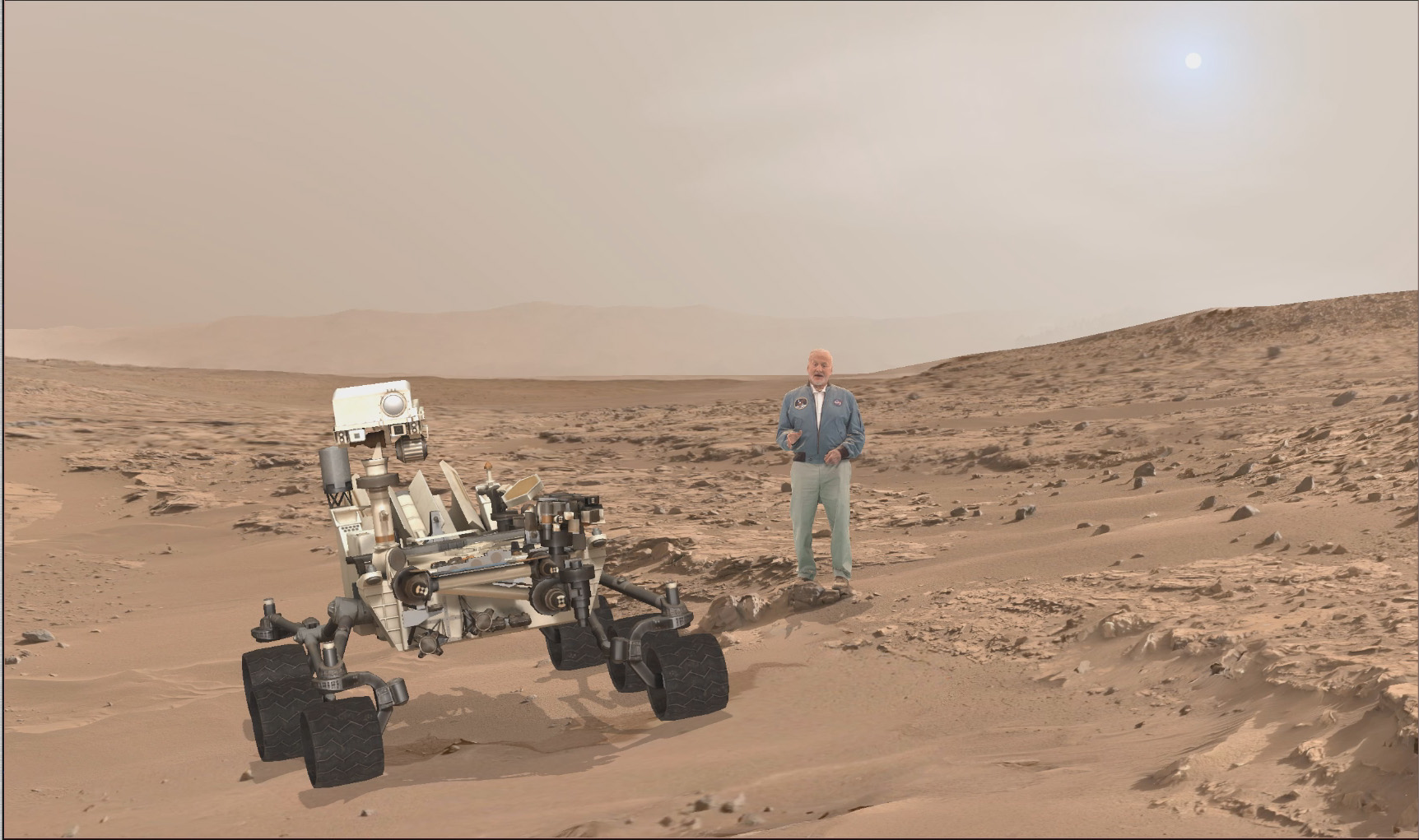
A scene from ‘Destination Mars’ of Buzz Aldrin and NASA’s Curiosity Mars rover with the Gale crater rim in the distance. The new, limited time interactive exhibit is now showing at the Kennedy Space Center visitor complex in Florida through Jan 1, 2017. Credit: NASA/JPL/Microsoft
A scene from ‘Destination Mars’ of Buzz Aldrin and NASA’s Curiosity Mars rover with the Gale crater rim in the distance. The new, limited time interactive exhibit is now showing at the Kennedy Space Center visitor complex in Florida through Jan 1, 2017. Credit: NASA/JPL/Microsoft
KENNEDY SPACE CENTER VISITOR COMPLEX, FL- Think a Holodeck adventure on Star Trek guided by real life Apollo 11 moonwalker Buzz Aldrin and you’ll get a really good idea of what’s in store for you as you explore the surface of Mars like never before in the immersive new ‘Destination Mars’ interactive holographic exhibit opening to the public today, Monday, Sept.19, at the Kennedy Space Center visitor complex in Florida.
The new Red Planet exhibit was formally opened for business during a very special ribbon cutting ceremony featuring Buzz Aldrin as the star attraction – deftly maneuvering the huge ceremonial scissors during an in depth media preview and briefing on Sunday, Sept. 18, 2016, including Universe Today.
The fabulous new ‘Destination Mars’ limited engagement exhibit magically transports you to the surface of the Red Planet via Microsoft HoloLens technology.
It literally allows you to ‘Walk on Mars’ using real imagery taken by NASA’s Mars Curiosity rover and explore the alien terrain, just like real life scientists on a geology research expedition.
A ceremonial ribbon is cut for the opening of new “Destination: Mars” experience at the Kennedy Space Center visitor complex in Florida during media preview on Sept. 18, 2016. From the left are Therrin Protze, chief operating officer of the visitor complex; center director Bob Cabana; Apollo 11 astronaut Buzz Aldrin; Kudo Tsunoda of Microsoft; and Jeff Norris of NASA’s Jet Propulsion Laboratory in Pasadena, California. Credit: Ken Kremer/kenkremer.com
“Technology like HoloLens leads us once again toward exploration,” Aldrin said during the Sept. 18 media preview. “It’s my hope that experiences like “Destination: Mars” will continue to inspire us to explore.”
Destination Mars was jointly developed by NASA’s Jet Propulsion Laboratory – which manages the Curiosity rover mission for NASA – and Microsoft HoloLens.
A ceremonial ribbon is cut for the opening of new “Destination: Mars” experience at the Kennedy Space Center visitor complex in Florida during media preview on Sept. 18, 2016. From the left are Therrin Protze, chief operating officer of the visitor complex; center director Bob Cabana; Apollo 11 astronaut Buzz Aldrin; Kudo Tsunoda of Microsoft; and Jeff Norris of NASA’s Jet Propulsion Laboratory in Pasadena, California. Credit: Dawn Taylor Leek
Buzz was ably assisted at the grand ribbon cutting ceremony by Bob Cabana, former shuttle commander and current Kennedy Space Center Director, Therrin Protze, chief operating officer of the visitor complex, Kudo Tsunoda of Microsoft, and Jeff Norris of NASA’s Jet Propulsion Laboratory in Pasadena, California.
The experience is housed in a pop-up theater that only runs for the next three and a half months, until New Years Day, January 1, 2017.
Before entering the theater, you will be fitted with specially adjusted HoloLens headsets individually tailored to your eyes.
The entire ‘Destination Mars’ experience only lasts barely 8 minutes.
So, if you are lucky enough to get a ticket inside you’ll need to take advantage of every precious second to scan around from left and right and back, and top to bottom. Be sure to check out Mount Sharp and the rim of Gale Crater.
You’ll even be able to find a real drill hole that Curiosity bored into the Red Planet at Yellowknife Bay about six months after the nailbiting landing in August 2012.
During your experience you will be guided by Buzz and Curiosity rover driver Erisa Hines of JPL. They will lead you to areas of Mars where the science team has made many breakthrough discoveries such as that liquid water once flowed on the floor of Curiosity’s Gale Crater landing site.
Curiosity rover driver Erisa Hines and Jeff Norris of NASA’s Jet Propulsion Laboratory at the grand opening for Destination Mars at the Kennedy Space Center visitor complex in Florida on Sept. 18, 2016. Credit Julian Leek
The scenes come to life based on imagery combining the Mastcam color cameras and the black and white navcam cameras, Jeff Norris of NASA’s Jet Propulsion Laboratory in Pasadena, California, told Universe Today in an interview.
Among the surface features visited is Yellowknife Bay where Curiosity conducted the first interplanetary drilling and sampling on another planet in our Solar System. The sample were subsequently fed to and analyzed by the pair of miniaturized chemistry labs – SAM and CheMin – inside the rovers belly.
They also guide viewers to “a tantalizing glimpse of a future Martian colony.”
“The technology that accomplishes this is called “mixed reality,” where virtual elements are merged with the user’s actual environment, creating a world in which real and virtual objects can interact, “ according to a NASA description.
“The public experience developed out of a JPL-designed tool called OnSight. Using the HoloLens headset, scientists across the world can explore geographic features on Mars and even plan future routes for the Curiosity rover.”
Curiosity is currently exploring the spectacular looking buttes in the Murray Buttes region in lower Mount Sharp. Read my recent update here.
A scene from ‘Destination Mars’ of Erisa Hines and NASA’s Curiosity Mars rover with Mount Sharp Gale crater rim in the distance. The new, limited time interactive exhibit is now showing at the Kennedy Space Center visitor complex in Florida through Jan 1, 2017. Credit: NASA/JPL/Microsoft
Be sure to pay attention or your discovery walk on Mars will be over before you know it. Personally, as a Mars lover and Mars mosaic maker I was thrilled by the 3 D reality and I was ready for more.
Curiosity accomplished Historic 1st drilling into Martian rock at John Klein outcrop on Feb 8, 2013 (Sol 182) and discovered a habitable zone, shown in this context mosaic view of the Yellowknife Bay basin taken on Jan. 26 (Sol 169). The robotic arm is pressing down on the surface at John Klein outcrop of veined hydrated minerals – dramatically back dropped with her ultimate destination; Mount Sharp. Credit: NASA/JPL-Caltech/Ken Kremer-kenkremer.com/Marco Di Lorenzo
This limited availability, timed experience is available on a first-come, first-served basis. Reservations must be made the day of your visite at the Destination: Mars reservation counter, says the KSC Visitor Complex (KSCVC).
You can get more information or book a visit to Kennedy Space Center Visitor Complex, by clicking on the website link:
Be sure to visit this spectacular holographic exhibit before it closes on New Year’s Day 2017 because it is only showing at KSCVC.
There are no plans to book it at other venues, Norris told me.
Apollo 11 moonwalker Buzz Aldrin describes newly opened ‘Destination Mars’ holographic experience during media preview at the Kennedy Space Center visitor complex in Florida on Sept. 18, 2016. Credit: Ken Kremer/kenkremer.com
As of today, Sol 1465, September 19, 2016, Curiosity has driven over 7.9 miles (12.7 kilometers) since its August 2012 landing inside Gale Crater, and taken over 354,000 amazing images.
Apollo 11 moonwalker Buzz Aldrin during media preview of newly opened ‘Destination Mars’ holographic experience at the Kennedy Space Center visitor complex in Florida on Sept. 18, 2016. Credit Julian Leek
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
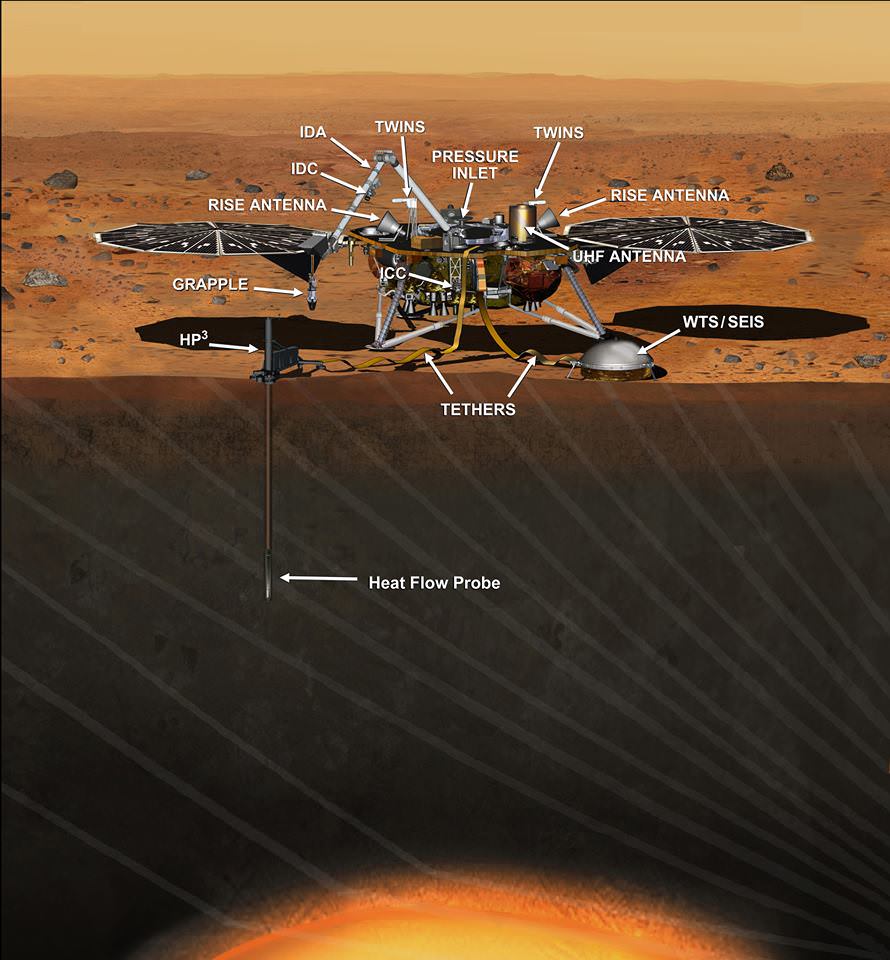
This artist's concept depicts the InSight lander on Mars after the lander's robotic arm has deployed a seismometer and a heat probe directly onto the ground. InSight is the first mission dedicated to investigating the deep interior of Mars. The findings will advance understanding of how all rocky planets, including Earth, formed and evolved. NASA approved a new launch date in May 2018. Credits: NASA/JPL-Caltech
This artist’s concept depicts the InSight lander on Mars after the lander’s robotic arm has deployed a seismometer and a heat probe directly onto the ground. InSight is the first mission dedicated to investigating the deep interior of Mars. The findings will advance understanding of how all rocky planets, including Earth, formed and evolved. NASA approved a new launch date in May 2018. Credits: NASA/JPL-Caltech
Top NASA managers have formally approved the launch of the agency’s InSight Lander to the Red Planet in the spring of 2018 following a postponement from this spring due to the discovery of a vacuum leak in a prime science instrument supplied by France.
The InSight missions goal is to accomplish an unprecedented study of the deep interior of the most Earth-like planet in our solar system.
NASA is now targeting a new launch window that begins May 5, 2018, for the Interior Exploration using Seismic Investigations, Geodesy and Heat Transport (InSight). mission aimed at studying the deep interior of Mars. The Mars landing is now scheduled for Nov. 26, 2018.
InSight had originally been slated for blastoff on March 4, 2016 atop a United Launch Alliance (ULA) Atlas V rocket from Vandenberg Air Force Base, California.
But the finding of a vacuum leak in its prime science instrument, the French-built Seismic Experiment for Interior Structure (SEIS), in December 2015 forced an unavoidable two year launch postponement. Because of the immutable laws of orbital mechanics, launch opportunities to the Red Planet only occur approximately every 26 months.
InSight’s purpose is to help us understand how rocky planets – including Earth – formed and evolved. The science goal is totally unique – to “listen to the heart of Mars to find the beat of rocky planet formation.”
The revised launch date was approved by the agency’s Science Mission Directorate.
“Our robotic scientific explorers such as InSight are paving the way toward an ambitious journey to send humans to the Red Planet,” said Geoff Yoder, acting associate administrator for NASA’s Science Mission Directorate, in Washington, in a statement.
“It’s gratifying that we are moving forward with this important mission to help us better understand the origins of Mars and all the rocky planets, including Earth.”
NASA’s InSight Mars lander spacecraft in a Lockheed Martin clean room near Denver. As part of a series of deployment tests, the spacecraft was commanded to deploy its solar arrays in the clean room to test and verify the exact process that it will use on the surface of Mars.
Since InSight would not have been able to carry out and fulfill its intended research objectives because of the vacuum leak in its defective SEIS seismometer instrument, NASA managers had no choice but to scrub this year’s launch. For a time its outlook for a future revival seemed potentially uncertain in light of today’s constrained budget environment.
The leak, if left uncorrected, would have rendered the flawed probe useless to carry out the unprecedented scientific research foreseen to measure the planets seismic activity and sense for “Marsquakes” to determine the nature of the Red Planet’s deep interior.
“The SEIS instrument — designed to measure ground movements as small as half the radius of a hydrogen atom — requires a perfect vacuum seal around its three main sensors in order to withstand harsh conditions on the Red Planet,” according to NASA.
The SEIS seismometer instrument was provided by the Centre National d’Études Spatiales (CNES) – the French national space agency equivalent to NASA. SEIS is one of the two primary science instruments aboard InSight. The other instrument measuring heat flow from the Martian interior is provided by the German Aerospace Center (DLR) and is named Heat Flow and Physical Properties Package (HP3). The HP3 instrument checked out perfectly.
NASA Jet Propulsion Laboratory (JPL) was assigned lead responsibility for the “replanned” mission and insuring that the SEIS instrument operates properly with no leaks.
JPL is “redesigning, developing and qualifying the instrument’s evacuated container and the electrical feedthroughs that failed previously. France’s space agency, the Centre National d’Études Spatiales (CNES), will focus on developing and delivering the key sensors for SEIS, integration of the sensors into the container, and the final integration of the instrument onto the spacecraft.”
“We’ve concluded that a replanned InSight mission for launch in 2018 is the best approach to fulfill these long-sought, high-priority science objectives,” said Jim Green, director of NASA’s Planetary Science Division.
The cost of the two-year delay and instrument redesign amounts to $153.8 million, on top of the original budget for InSight of $675 million.
NASA says this cost will not force a delay or cancellation to any current missions. However, “there may be fewer opportunities for new missions in future years, from fiscal years 2017-2020.”
Back shell of NASA’s InSight spacecraft is being lowered onto the mission’s lander, which is folded into its stowed configuration. The back shell and a heat shield form the aeroshell, which will protect the lander as the spacecraft plunges into the upper atmosphere of Mars. Launch now rescheduled to May 2018 to fix French-built seismometer. Credit: NASA/JPL-Caltech/Lockheed Martin
Lockheed Martin is the prime contractor for InSight and placed the spacecraft in storage while SEIS is fixed.
InSight is funded by NASA’s Discovery Program of low cost, focused science missions along with the science instrument funding contributions from France and Germany.
Mars has the same basic internal structure as the Earth and other terrestrial (rocky) planets. It is large enough to have pressures equivalent to those throughout the Earth’s upper mantle, and it has a core with a similar fraction of it’s mass. In contrast, the pressure even near the center of the Moon barely reach that just below the Earth’s crust and it has a tiny, almost negligible core. The size of Mars indicates that it must have undergone many of the same separation and crystallization processes that formed the Earth’s crust and core during early planetary formation. Credit: JPL/NASA
Learn more about OSIRIS-REx, InSight Mars lander, SpaceX missions, Juno at Jupiter, SpaceX CRS-9 rocket launch, ISS, ULA Atlas and Delta rockets, Orbital ATK Cygnus, Boeing, Space Taxis, Mars rovers, Orion, SLS, Antares, NASA missions and more at Ken’s upcoming outreach events:
Sep 6-8: “OSIRIS-REx lainch, SpaceX missions/launches to ISS on CRS-9, Juno at Jupiter, ULA Delta 4 Heavy spy satellite, SLS, Orion, Commercial crew, Curiosity explores Mars, Pluto and more,” Kennedy Space Center Quality Inn, Titusville, FL, evenings
This 360-degree panorama was acquired by the Mast Camera (Mastcam) on NASA's Curiosity Mars rover as the rover neared features called "Murray Buttes" on lower Mount Sharp. Credit: NASA/JPL-Caltech/MSSS
This 360-degree panorama was acquired by the Mast Camera (Mastcam) on NASA’s Curiosity Mars rover as the rover neared features called “Murray Buttes” on lower Mount Sharp. Credit: NASA/JPL-Caltech/MSSS
This is a key milestone for the Curiosity mission because the “Murray Buttes” are the entry way along Curiosity’s planned route up lower Mount Sharp.
Ascending and diligently exploring the sedimentary lower layers of Mount Sharp, which towers 3.4 miles (5.5 kilometers) into the Martian sky, is the primary destination and goal of the rovers long term scientific expedition on the Red Planet.
The area features eroded mesas and buttes that are reminiscent of the U.S. Southwest.
So the team directed the rover to capture a 360-degree color panorama using the robots mast mounted Mastcam camera earlier this month on Aug. 5.
The full panorama shown above combines more than 130 images taken by Curiosity on Aug. 5, 2016, during the afternoon of Sol 1421 by the Mastcam’s left-eye camera.
In particular note the dark, flat-topped mesa seen to the left of the rover’s arm. It stands about 50 feet (about 15 meters) high and, near the top, about 200 feet (about 60 meters) wide.
Coincidentally, Aug. 5 also marks the fourth anniversary of the six wheeled rovers landing on the Red Planet via the unprecedented Sky Crane maneuver.
You can explore this spectacular Mars panorama in great detail via this specially produced 360-degree panorama from JPL. Simply move the magnificent view back and forth and up and down and all around with your mouse or mobile device.
Video Caption: This 360-degree panorama was acquired on Aug. 5, 2016, by the Mastcam on NASA’s Curiosity Mars rover as the rover neared features called “Murray Buttes” on lower Mount Sharp. The dark, flat-topped mesa seen to the left of the rover’s arm is about 50 feet (about 15 meters) high and, near the top, about 200 feet (about 60 meters) wide.
“The buttes and mesas are capped with rock that is relatively resistant to wind erosion. This helps preserve these monumental remnants of a layer that formerly more fully covered the underlying layer that the rover is now driving on,” say rover scientists.
“The relatively flat foreground is part of a geological layer called the Murray formation, which formed from lakebed mud deposits. The buttes and mesas rising above this surface are eroded remnants of ancient sandstone that originated when winds deposited sand after lower Mount Sharp had formed. Curiosity closely examined that layer — the Stimson formation — during the first half of 2016 while crossing a feature called “Naukluft Plateau” between two exposures of the Murray formation.”
Three years ago, the team informally named the site to honor Caltech planetary scientist Bruce Murray (1931-2013), a former director of NASA’s Jet Propulsion Laboratory, Pasadena, California. JPL manages the Curiosity mission for NASA.
As of today, Sol 1447, August 31, 2016, Curiosity has driven over 7.9 miles (12.7 kilometers) since its August 2012 landing, and taken over 348,500 amazing images.
Curiosity explores Red Planet paradise at Namib Dune during Christmas 2015 – backdropped by Mount Sharp. Curiosity took first ever self-portrait with Mastcam color camera after arriving at the lee face of Namib Dune. This photo mosaic shows a portion of the full self portrait and is stitched from Mastcam color camera raw images taken on Sol 1197, Dec. 19, 2015. Credit: NASA/JPL/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.