
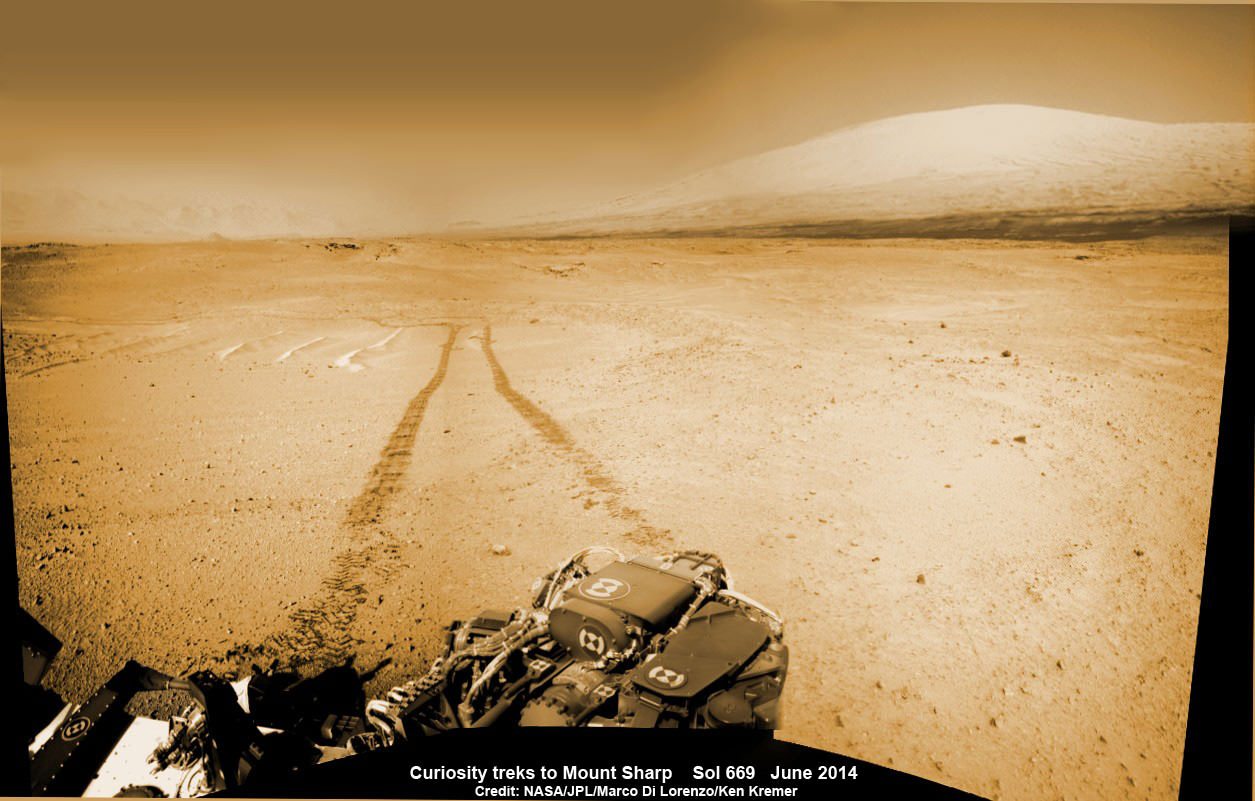
2 Years on Mars!
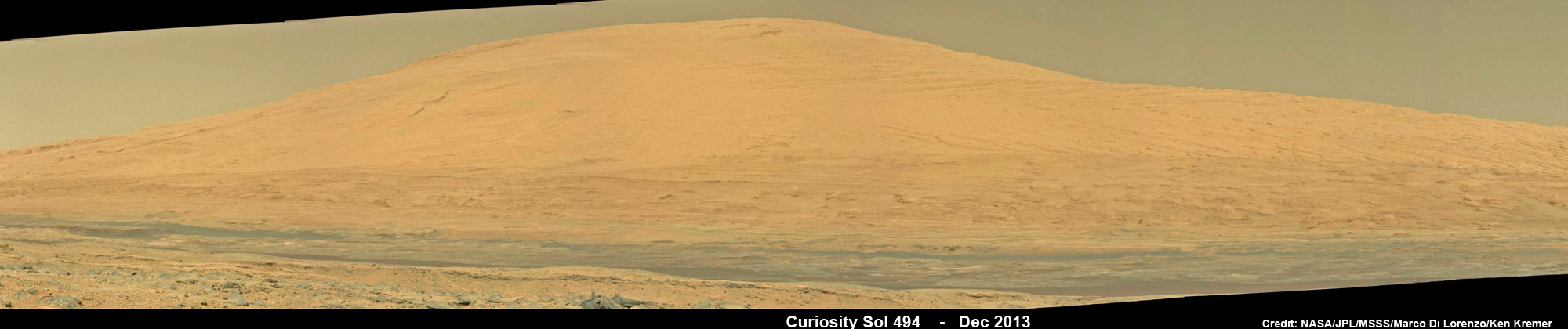
Curiosity treks to Mount Sharp, her primary science destination, in this photo mosaic view captured on Sol 669, June 24, 2014. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer – kenkremer.com
Story and mosaics updated[/caption]
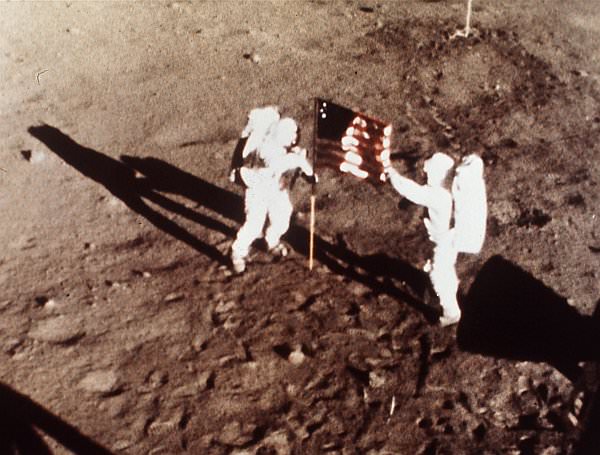
NASA’s most scientifically powerful rover ever dispatched to the Red Planet, Curiosity, is celebrating her 2nd anniversary on Mars since the dramatic touchdown inside Gale Crater on Aug. 6, 2012, EDT (Aug. 5, 2012, PDT) while simultaneously approaching a bedrock unit that for the first time is actually part of the humongous mountain she will soon scale and is the primary science destination of the mission.
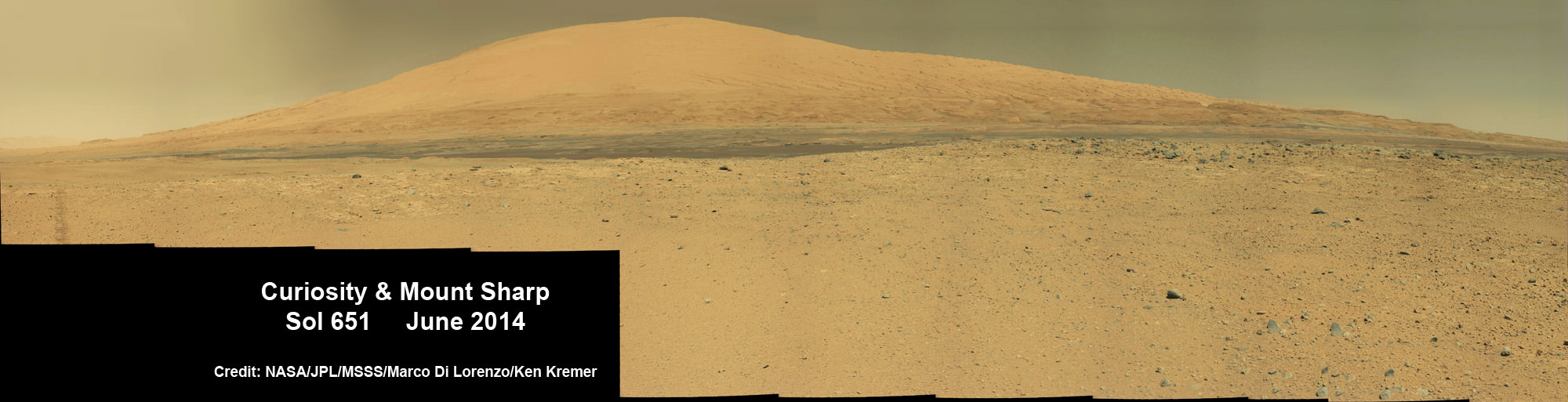
Mount Sharp is a layered mountain that dominates most of Gale Crater and towers 3.4 miles (5.5 kilometers) into the Martian sky and is taller than Mount Rainier.
Aug. 6, 2014 marks ‘2 Years on Mars’ and Sol 711 for Curiosity in an area called “Hidden Valley.”
“Getting to Mount Sharp is the next big step for Curiosity and we expect that in the Fall of this year,” Dr. Jim Green, NASA’s Director of Planetary Sciences at NASA Headquarters, Washington, DC, told me in an interview making the 2nd anniversary.
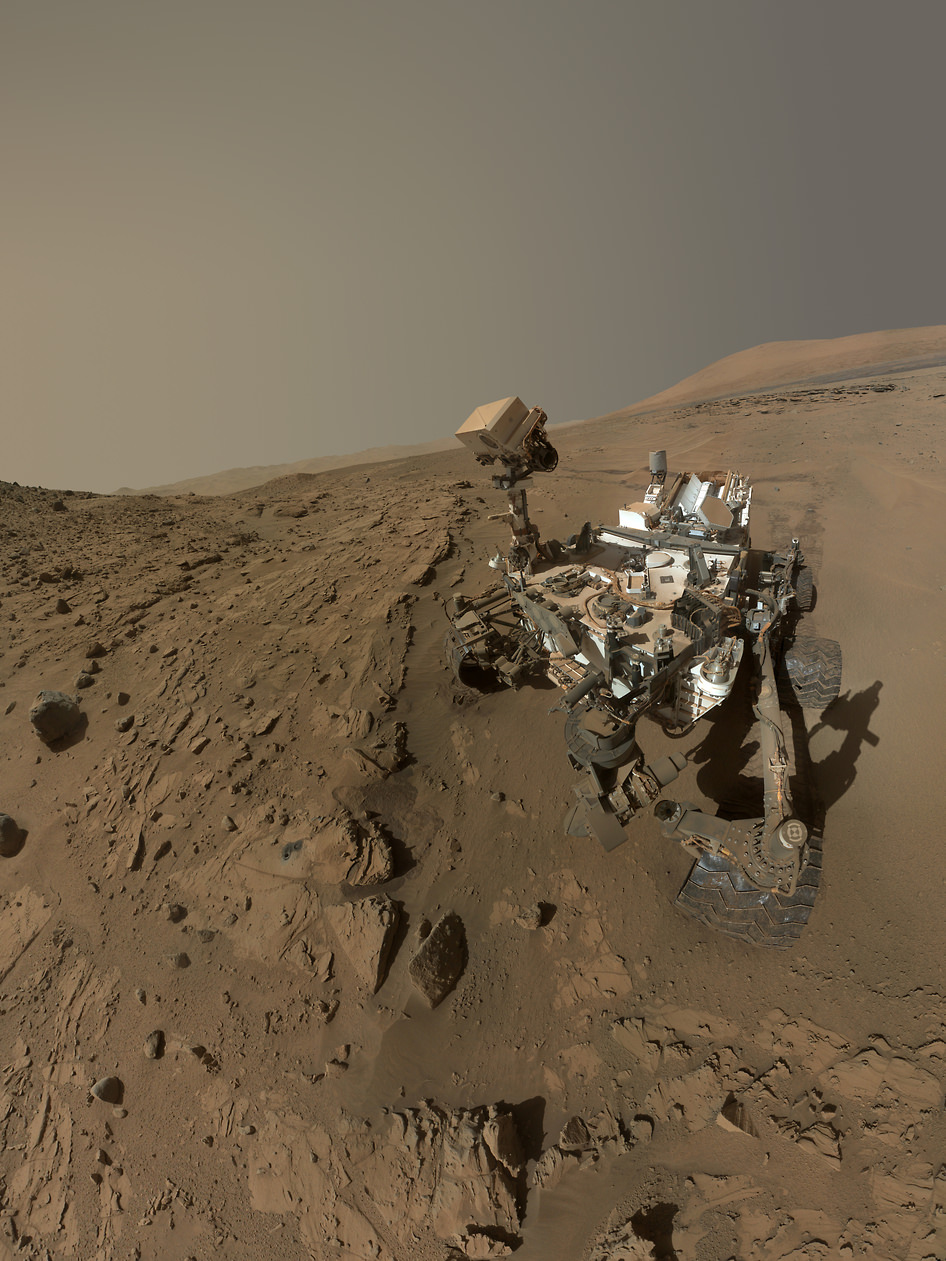
The 1 ton rover is equipped with 10 state-of-the-art science instruments and searching for signs of life.
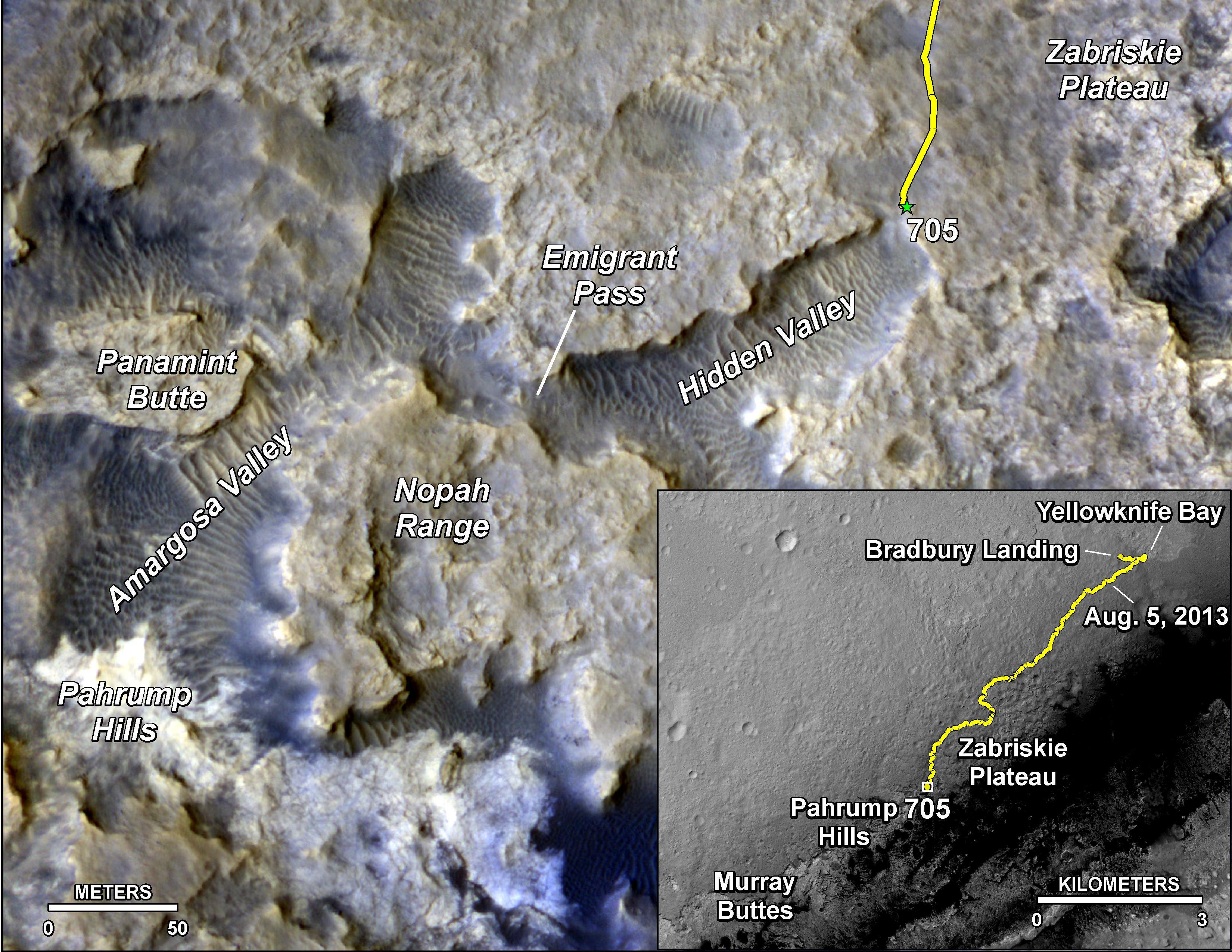
The mysterious mountain is so huge that outcrops of bedrock extend several miles out from its base and Curiosity is now within striking distance of reaching the area the rover team calls “Pahrump Hills.”

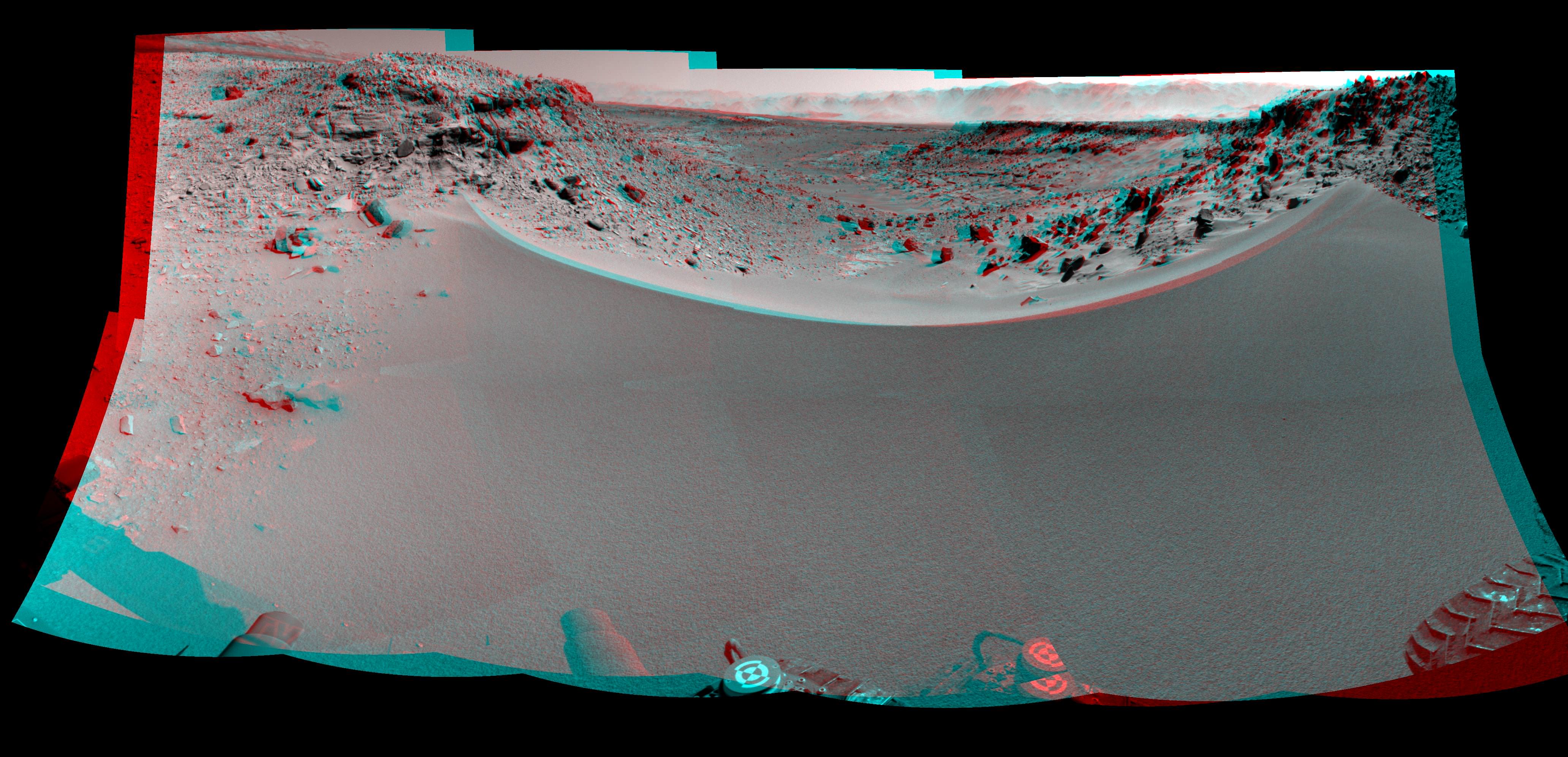
NASA’s Curiosity rover celebrated the 2nd anniversary on Mars at ‘Hidden Valley’ as shown in this photo mosaic view captured on Aug. 6, 2014, Sol 711. Note the valley walls, rover tracks and distant crater rim. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer-kenkremer.com/Marco Di Lorenzo
Scientists anticipate that the outcrops at “Pahrump Hills” offer a preview of a geological unit that is part of the base of Mount Sharp for the first time since landing rather than still belonging to the floor of Gale Crater.
“We’re coming to our first taste of a geological unit that’s part of the base of the mountain rather than the floor of the crater,” said Curiosity Project Scientist John Grotzinger of the California Institute of Technology, Pasadena, in a statement.
“We will cross a major terrain boundary.”
Since “Pahrump Hills” is less than one-third of a mile (500 meters) from Curiosity she should arrive soon.
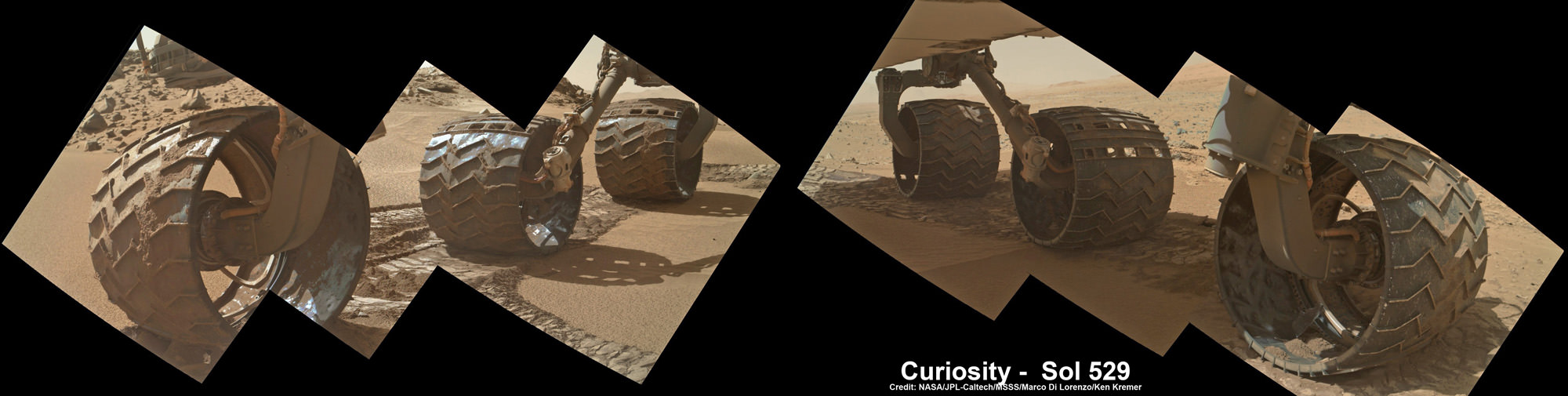
In late July 2014, the rover arrived in an area of sandy terrain called “Hidden Valley” which is on the planned route ahead leading to “Pahrump Hills” and easily traversable with few of the sharp edged rocks that have caused significant damage to the rovers six aluminum wheels.

The sedimentary layers in the lower slopes of Mount Sharp have been Curiosity’s long-term science destination.
They are the principal reason why the science team specifically chose Gale Crater as the primary landing site based on high resolution spectral observations collected by NASA’s powerful Mars Reconnaissance Orbiter (MRO) indicating the presence of deposits of clay-bearing sedimentary rocks.
Curiosity’s goal all along has been to determine whether Mars ever offered environmental conditions favorable for microbial life. Finding clay bearing minerals. or phyllosilicates, in Martian rocks is the key to fulfilling its major objective.
The team expected to find the clay bearing minerals only in the sedimentary layers at the lower reaches of Mount Sharp.
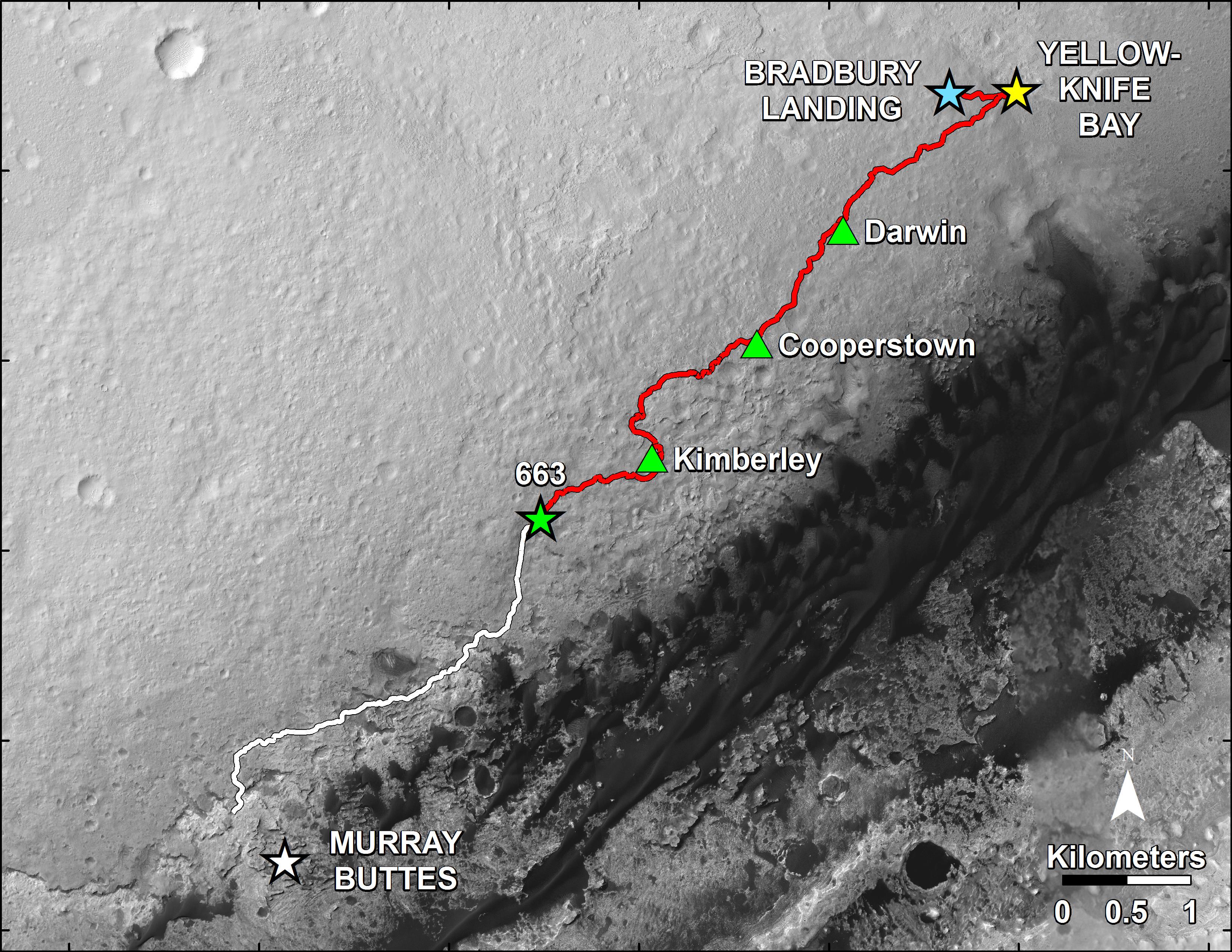
Soon after landing, the team spotted some rather interesting looking outcrops barely a half mile away from the touchdown zone at a spot dubbed ‘Yellowknife Bay” and decided to take a detour towards it to investigate.
Well the scientists won the bet and struck scientific gold barely six months after landing when they drilled into a rock outcrop named “John Klein” at “Yellowknife Bay” and unexpectedly discovered the clay bearing minerals on the crater floor.
Yellowknife Bay was found to be an ancient lakebed where liquid water flowed on Mars surface billions of years ago.
The discovery of phyllosilicates in the 1st drill sample during the spring of 2013 meant that Curiosity had rather remarkably already fulfilled its primary goal of finding a habitable zone during its first year of operations!
The rock analysis “yielded evidence of a lakebed environment billions of years ago that offered fresh water, all of the key elemental ingredients for life, and a chemical source of energy for microbes, if any existed there,” according to NASA.

“Before landing, we expected that we would need to drive much farther before answering that habitability question,” said Curiosity Project Scientist John Grotzinger of the California Institute of Technology, Pasadena. “We were able to take advantage of landing very close to an ancient streambed and lake. Now we want to learn more about how environmental conditions on Mars evolved, and we know where to go to do that.”
During the rovers second Earth year on the Red Planet, Curiosity has been driving as fast as possible towards a safe entry point to the slopes of Mount Sharp. The desired destination for the car sized rover is now about 2 miles (3 kilometers) southwest of its current location.
‘Driving, Driving, Driving’ is indeed the rover teams mantra.
To date, Curiosity’s odometer totals over 5.5 miles (9.0 kilometers) since landing inside Gale Crater on Mars in August 2012. She has taken over 174,000 images.
Curiosity still has about another 2 miles (3 kilometers) to go to reach the entry way at a gap in the treacherous sand dunes at the foothills of Mount Sharp sometime later this year.
And NASA is moving forward with future Red Planet missions when it recently announced the selection of 7 instruments chosen to fly aboard the Mars 2020 rover, the agency’s next rover going to Mars that will search for signs of ancient life as well as carry a technology demonstration that will help pave the way for ‘Humans to Mars’ in the 2030s. Read my story – here.
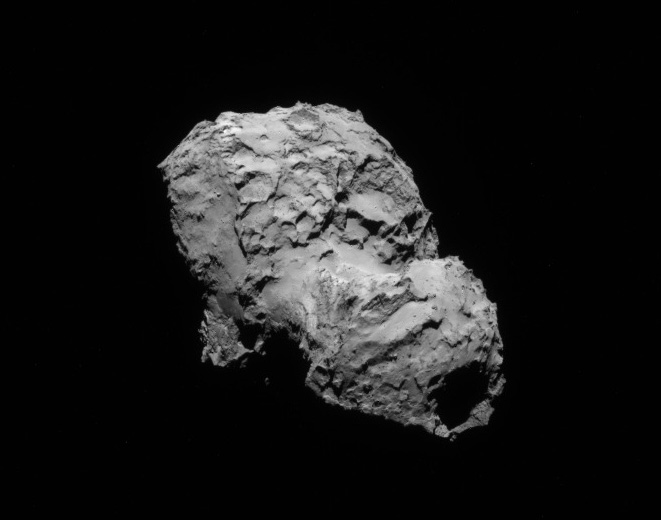
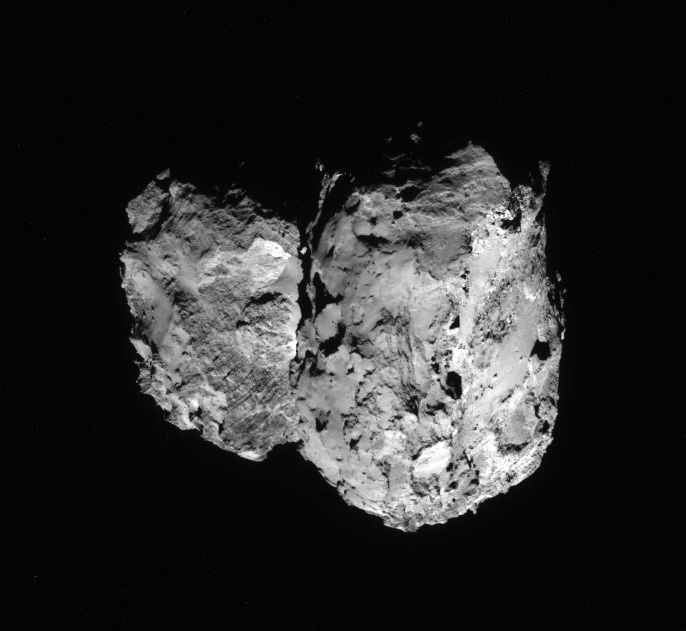
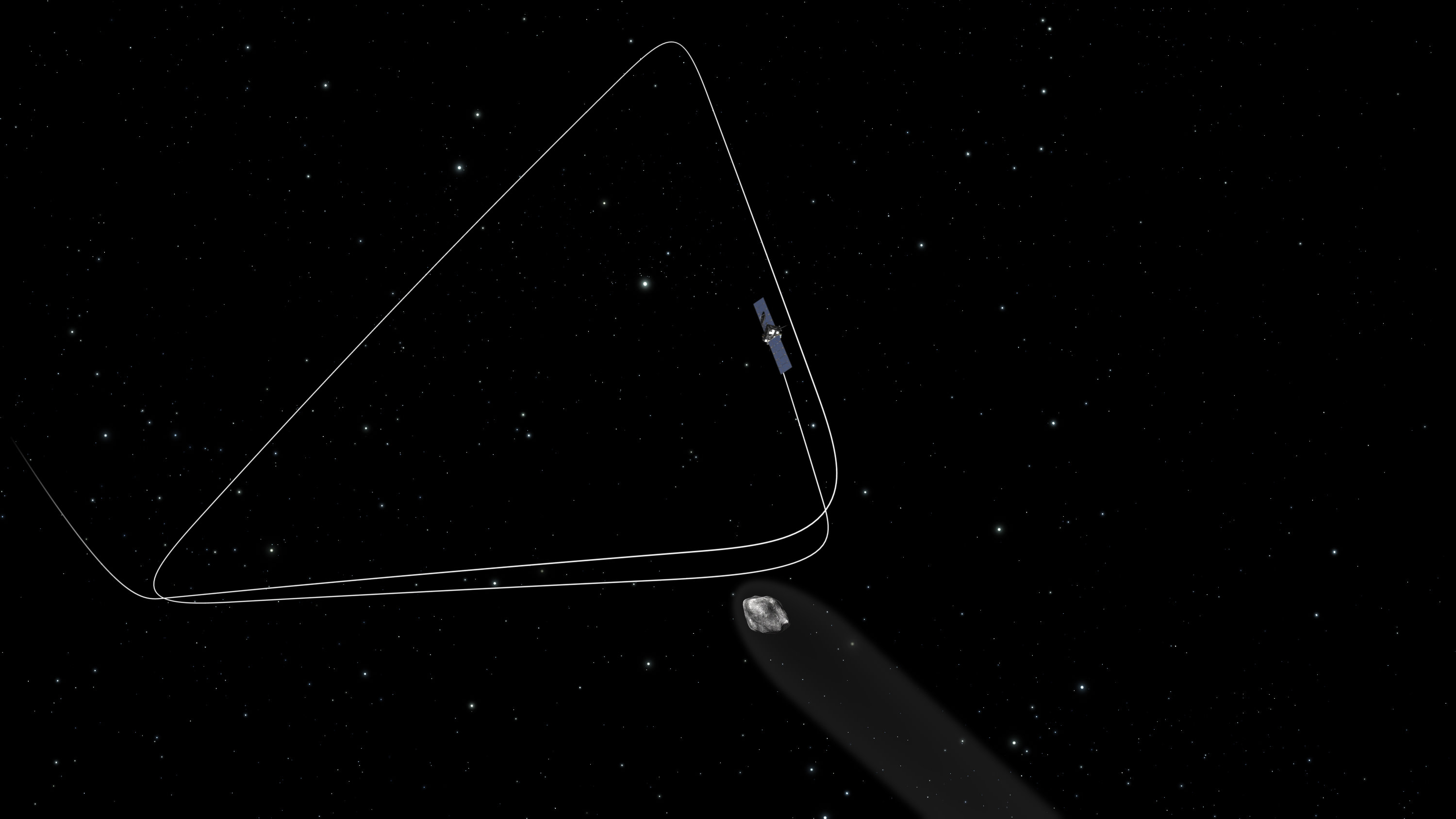
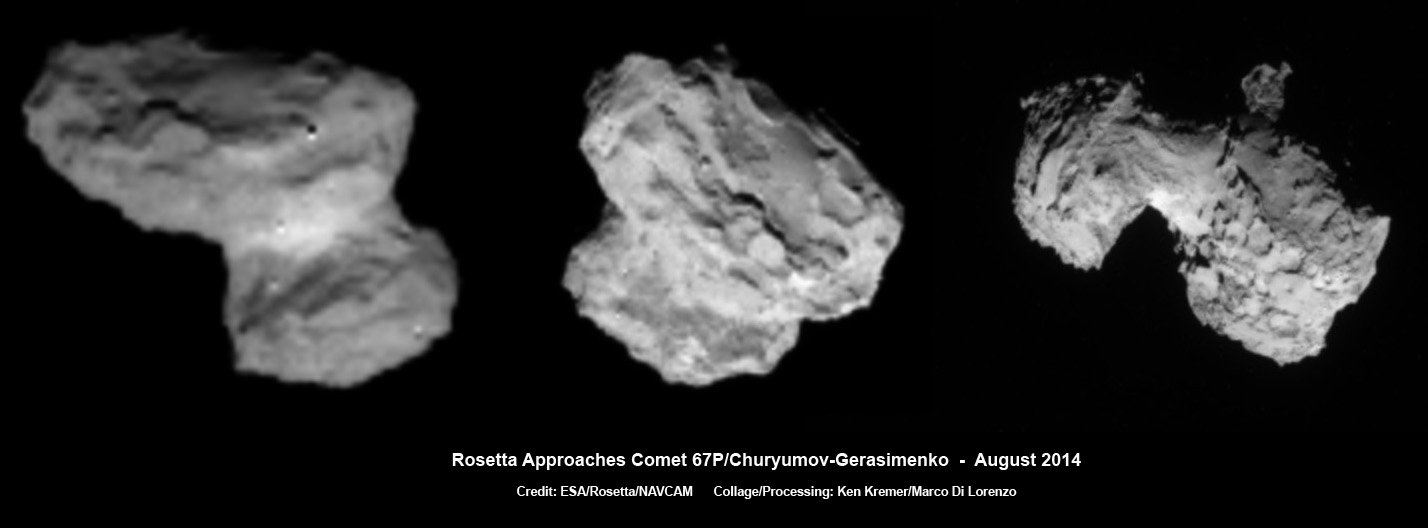
Coincidentally, ESA’s Rosetta comet hunting spacecraft arrived in orbit at its destination Comet 67P after a 10 year voyage on the same day as Curiosity’s 2 Earth year anniversary.
Stay tuned here for Ken’s continuing Rosetta, Curiosity, Opportunity, Orion, SpaceX, Boeing, Orbital Sciences, commercial space, MAVEN, MOM, Mars and more planetary and human spaceflight news.
























![MER10-SpiritAndOpportunity_ByTheNumbers[1]](https://www.universetoday.com/wp-content/uploads/2014/01/MER10-SpiritAndOpportunity_ByTheNumbers1.jpg)