Curiosity Celebrates 500 Sols on Mars on Jan. 1, 2014
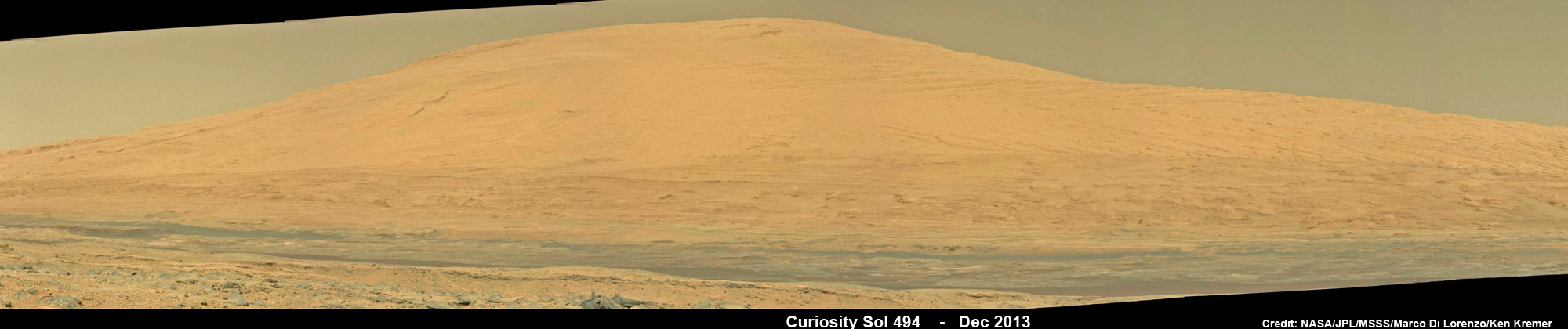
NASA’s Curiosity rover snaps fabulous new mosaic spying towering Mount Sharp destination looming dead ahead with her high resolution color cameras, in this cropped view. See full mosaic below. Imagery assembled from Mastcam raw images taken on Dec. 26, 2013 (Sol 494).
Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer- kenkremer.com
Story updated[/caption]
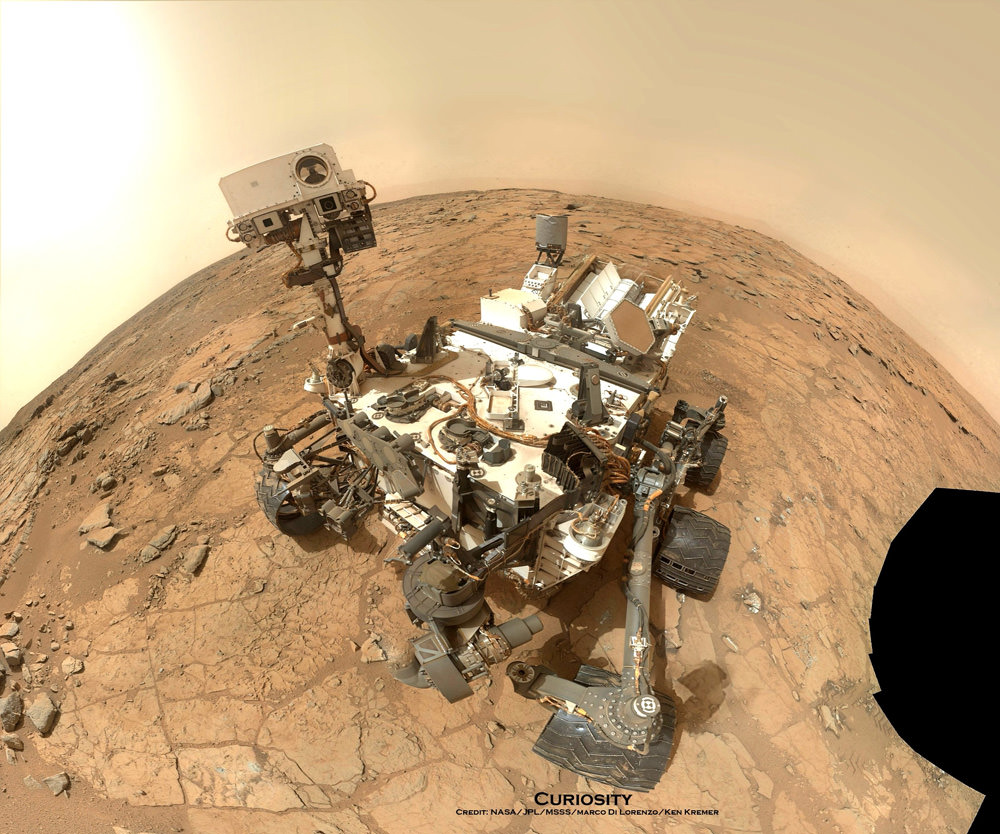
Today, New Year’s Day 2014, NASA’s Curiosity mega rover celebrates a huge mission milestone – her 500th Martian Day on the Red Planet since the death defying touchdown of August 2012.
“500 Sols of Mars: While Earth celebrates #NewYear2014, midnight on Mars mark my 500th day of operations,” she tweeted today.
And Curiosity marked the grand occasion by snapping a fabulous new panorama spying towering Mount Sharp – looming dead ahead in her high resolution color cameras.
You can take in the magnificent Martian view Curiosity sees today – via our newly assembled mosaic of humongous Mount Sharp rising 5.5 kilometers (3.4 mi) into the Red Planets sky; see above and below.
Ascending mysterious Mount Sharp – which dominates the Gale Crater landing site – is the ultimate reason for Curiosity’s being.

NASA’s science and engineering teams dispatched the state-of-the-art robot there because they believe the lower sedimentary layers hold the clues to the time period when Mars was habitable eons ago and they possess the required chemical ingredients necessary to sustain microbial life.
But first she needs to reach the mountains foothills.
So, just like some Earthlings, Curiosity also set a New Year’s resolution she’d like to share with you all – just tweeted all the way from the Red Planet.
“Goals for 2014: Finish driving to Mars’ Mount Sharp & do all the science I can.”

Part of those goals involve shifting the missions focus to include the search for organic molecules – the building blocks of life as we know it – which may be preserved in the sedimentary rock layers.
“Really what we’re doing is turning the corner from a mission that is dedicated to the search for habitable environments to a mission that is now dedicated to the search for that subset of habitable environments which also preserves organic carbon,” Curiosity Principal Investigator John Grotzinger, of the California Institute of Technology in Pasadena, said recently at the Dec. 2013 annual meeting of the American Geophysical Union (AGU).
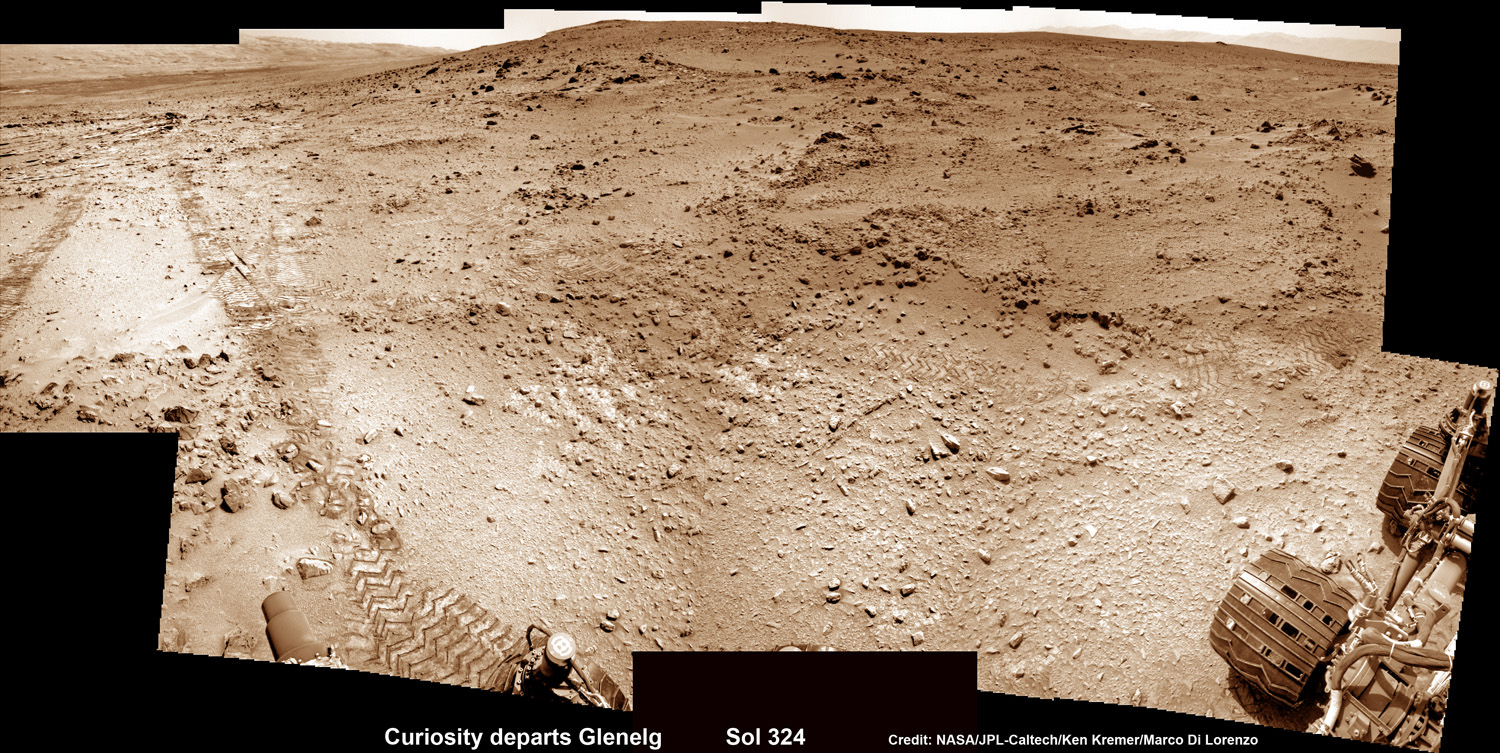
The 1 ton behemoth is in the midst of an epic trek to destination Mount Sharp, roving across 10 kilometers (6 mi.) of the rather rocky crater floor of her landing site inside Gale Crater.
But the alien crater floor strewn with a plethora of sharp edged rocks is ripping significant sized holes and causing numerous dents in several of the rovers six big aluminum wheels – as outlined in my prior report; here.

“Routes to future destinations for the mission may be charted to lessen the amount of travel over such rough terrain, compared to smoother ground nearby,” says NASA.
So far Curiosity’s odometer stands at 4.6 kilometers, following a post Christmas drive on Dec. 26, 2013 (Sol 494) after 16 months roving the Red Planet.
Curiosity’s handlers will be diligently watching the wear and tear on the 20 inch diameter wheels. She needs to rove along a smoother path forward to minimize wheel damage by sharp rocks.
Here’s our latest wheel mosaic from Dec. 26, 2013 (Sol 494) showing a several centimeter wide puncture in the left front wheel, which seems to have suffered the most damage.
The Mount Sharp and wheel mosaics were assembled by the imaging team of Marco Di Lorenzo and Ken Kremer.
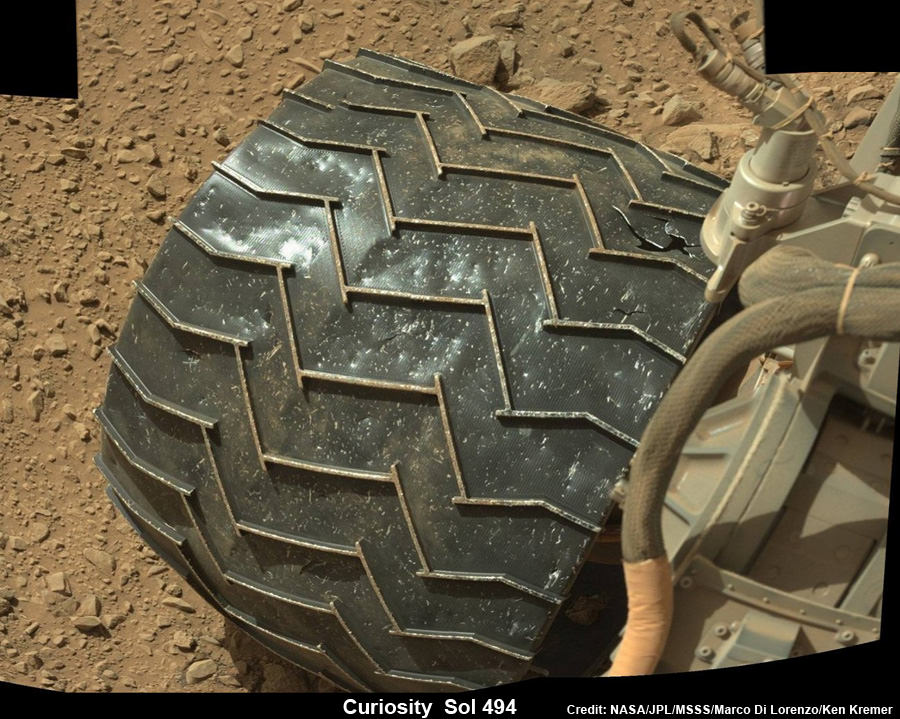
“Taking stock this holiday season. I’m planning smoother paths for the new year,” Curiosity tweeted.
The team hopes the intrepid robot arrives at the base of Mount Sharp around the middle of this new year 2014, if all goes well.
Shortly thereafter the robot begins a new phase with the dramatic ascent up the chosen entryway which the team dubs the ‘Murray Buttes’ – fittingly named in honor of Bruce Murray, a Caltech planetary geologist, who worked on science teams of NASA’s earliest missions to Mars in the 1960s and ’70s.

Murray also was the director of NASA’s Jet Propulsion Laboratory from 1976 to 1982 and co-founded the Planetary Society in 1980. He passed away on Aug. 29, 2013.
“Bruce Murray contributed both scientific insight and leadership that laid the groundwork for interplanetary missions such as robotic missions to Mars, including the Mars rovers, part of America’s inspirational accomplishments. It is fitting that the rover teams have chosen his name for significant landmarks on their expeditions,” said NASA Mars Exploration Program Manager Fuk Li, of NASA’s Jet Propulsion Laboratory (JPL) , Pasadena, Calif.
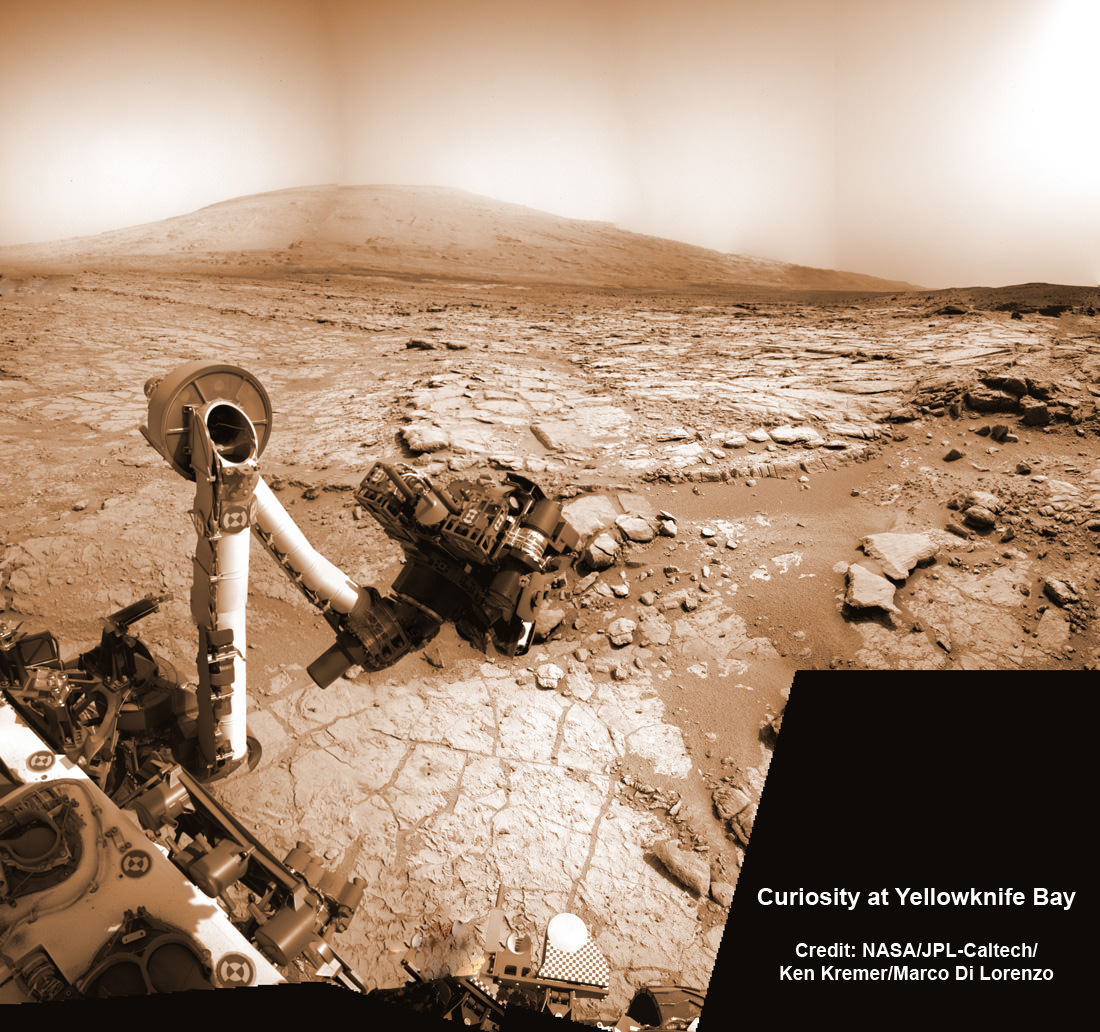
Curiosity has already accomplished her primary goal of discovering a habitable zone on Mars that could support Martian microbes if they ever existed.
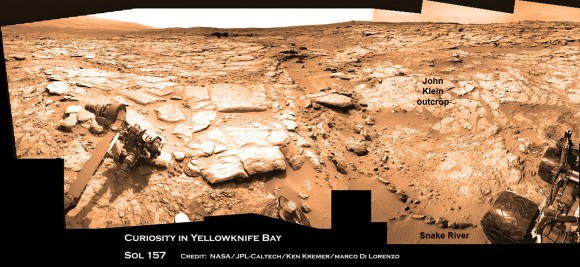
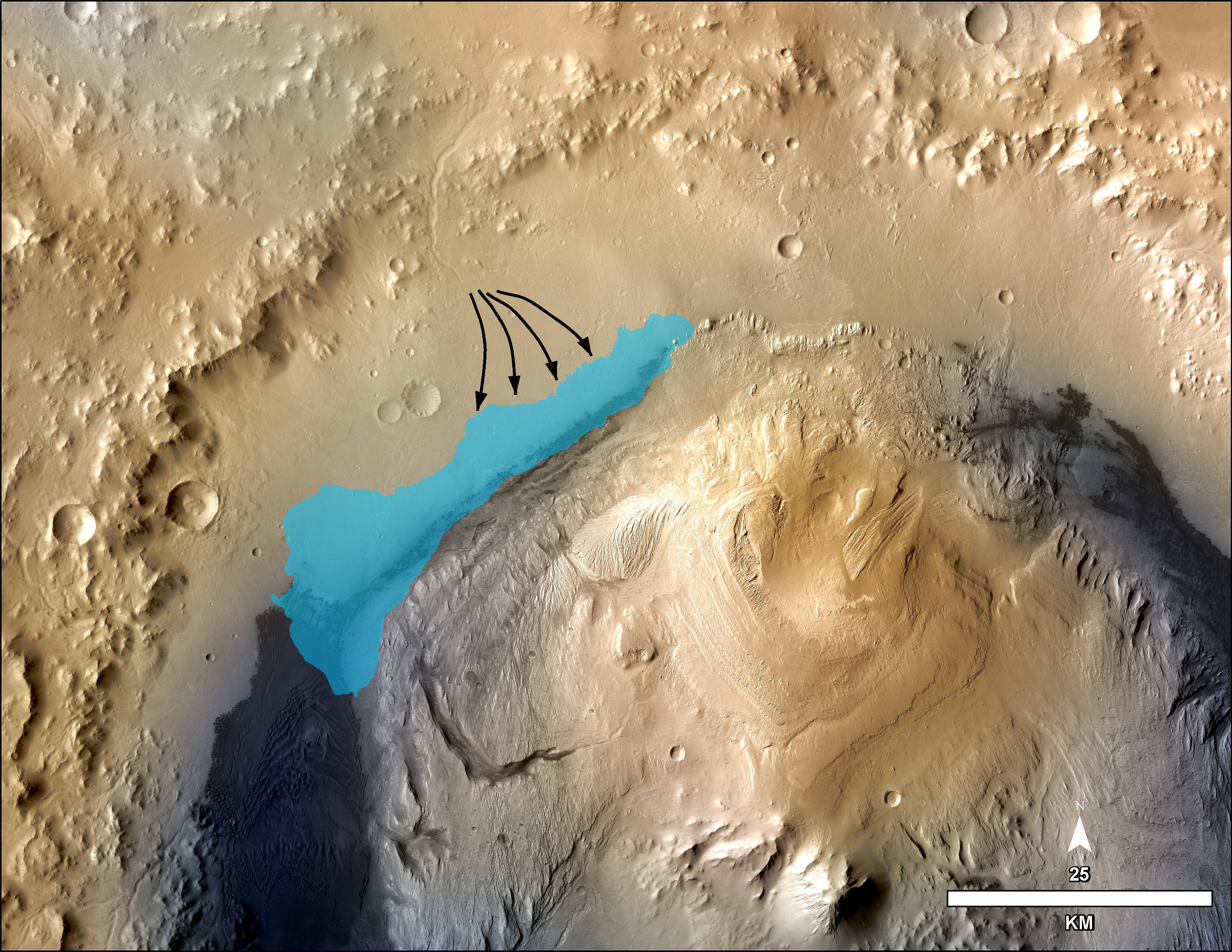
NASA’s rover Curiosity uncovered evidence that an ancient Martian lake had the right chemical ingredients, including clay minerals that could have sustained microbial life forms for long periods of time – and that these habitable conditions persisted on the Red Planet until a more recent epoch than previously thought.
Meanwhile, NASA’s Opportunity rover is ascending Solander Point on the opposite side of Mars.
And a pair of newly launched orbiters are streaking to the Red Planet; NASA’s MAVEN and India’s MOM.
And China’s new Yutu lunar rover and Chang’e-3 lander are napping through the lunar night.
For a great compilation of the top space events in 2013- read this article.
Stay tuned here for Ken’s continuing Curiosity, Chang’e-3, SpaceX, Orbital Sciences, LADEE, MAVEN, Mars rover and MOM news.
…………….
Learn more about Curiosity, MAVEN, MOM, Mars rovers, SpaceX, Orbital Sciences Antares Jan. 7 launch, and more at Ken’s upcoming presentations
Jan 6-8: “Antares/Cygnus ISS Rocket Launch from Virginia on Jan. 7” & “Space mission updates”; Rodeway Inn, Chincoteague, VA, evening














![PIA16716_ip[1]](https://www.universetoday.com/wp-content/uploads/2013/01/PIA16716_ip1-580x580.jpg)