No rocket sleds were harmed in the making of this video. (NASA/JPL)
“You wanna go to Mars, you wanna go big? Then you gotta test big here,” says mechanical engineer Michael Meacham, and testing big is exactly what he and other engineers at NASA’s Jet Propulsion Laboratory have done to develop a new supersonic parachute for future Mars landings.
The process of putting things onto Mars has traditionally used the same couple of tried-and-true methods: inflatable, shock-absorbing bouncers and large parachutes combined with retro-rockets (most recently seen in the famous “Seven Minutes of Terror” Curiosity landing in August 2012.) But both methods are limited in how large and massive of an object can safely be placed on the Martian surface. For even larger-scale future missions, new technology will have to be developed to make successful landings possible.
Enter the LDSD, or Low-Density Supersonic Decelerator, an enormous parachute — similar to the one used by Curiosity except bigger — that can slow the descent of even more massive payloads through the thin Martian atmosphere.
Of course, part of the development process is testing. And in order to run such a large chute through the same sorts of rigors it would experience during an actual Mars landing, JPL engineers had to step outside of the wind tunnel and devise another method.
The one they came up with involves a rocket sled, a Night Hawk helicopter, a 100-lb steel bullet, a kilometer-long cable (and lots and lots of math.) It’s an experiment worthy of “Mythbusters”… watch the video above to see how it turned out.
“When we land spacecraft on Mars, we’re going extremely fast… we have got to slow down. So we use a parachute. And we use a really BIG parachute.”
– Michael Meacham, Mechanical Engineer at JPL
The participants of the DSN NASA Social gathered in front of the DSS-14 70-meter antenna at Goldstone, April 2, 2014.
When you’re talking to spacecraft billions of miles away, you need a powerful voice. And when you’re listening for their faint replies from those same staggering distances, you need an even bigger set of ears. Fortunately, NASA’s Deep Space Network has both — and last week I had the chance to see some of them up close and in person as one of the lucky participants in a NASA Social! Here’s my overview of what happened on those two exciting days.
(And if this doesn’t make you want to apply for the next Social, I don’t know what will.)
The main building at Jet Propulsion Laboratory in Pasadena (J. Major)
The event began on April 1 (no foolin’) at NASA’s Jet Propulsion Laboratory in Pasadena. Nestled at the feet of steep pine-covered hills northeast of Los Angeles, JPL’s campus is absolutely gorgeous… not quite the location you might imagine for the birthplace of robotic interplanetary explorers! But for over 55 years JPL has been developing some of the world’s most advanced spacecraft, from the Ranger probes which took NASA’s first close-up images of the Moon to the twin Voyagers that toured the Solar System’s outer planets, countless Earth-observing satellites that have revolutionized our ability to monitor global weather, and all of the rovers that have been our first “wheels on the ground” on Mars.
Of course, none of those missions would have been possible if we didn’t have the ability to communicate with the spacecraft. That’s why NASA’s Deep Space Network is such an integral — even if not oft-publicized — part of each and every mission… and has been for 50 years.
In fact, that was the purpose of this Social event which gathered together 50 space fans from across the U.S. — to celebrate the achievements of the DSN with an eye-opening tour of both JPL and the DSN’s Goldstone facility with its flagship 70-meter dish, located amongst the rocky scrub-covered hills in the middle of a military base in California’s Mojave desert.
For many participants — including myself — it was the first time visiting JPL. I can’t tell you how many times I’ve written about the news that comes out of it, featured its amazing images, and typed the credit line “NASA/JPL-Caltech” in the caption of a picture, so for me it was incredible to actually be there in person. Just driving through the front gate at JPL, with “Welcome To Our Universe” mounted over the window of the guard station, was mind-blowing!
Setting up camp in Mission Control (J. Major)This 16-inch-wide plaque is set into the floor of the “dark room” at JPL Mission Control, covered by a pane of clear acrylic. (J. Major)
From the Visitor’s Center we were gathered into groups and taken into the heart of JPL to get a look at the Mission Control room, aka the “center of the universe.” This is where all the data from ongoing space exploration missions arrives (after being collected by the Deep Space Network, of course.) And we didn’t just get to see Mission Control — we actually set up our computers there and got to take our seats at the very same desks that top JPL and NASA engineers and scientists used during the MSL landing in August 2012! In fact we were treated to a replay of Curiosity’s landing on the screens against the wall that first displayed the rover’s images of Gale Crater. The whole experience was a bit surreal — I vividly recall watching it live, and there we were in the same room as if it were happening all over again! (We even got to re-enact the celebration of the touchdown announcement as our group photo.)
After several presentations and Q&A sessions with NASA mission engineers — recorded live for NASA TV — we all embarked on a tour of JPL’s rock-strewn “Mars Yard” where a stunt double of Curiosity, named “Maggie,” resides in a super high-tech garage. Maggie helps engineers determine what Curiosity can and can’t do on Mars… much more safely than actually having the “real” rover attempt itself.
Watch the NASA TV coverage from Mission Control below:
The group then got the chance to see an actual spacecraft being built in the Spacecraft Assembly Facility, a huge clean room where engineers were building components of the upcoming SMAP (Soil Moisture Active Passive) satellite. Slated for launch in October, SMAP will take measurements of the planet’s soil moisture in its freeze/thaw states from orbit over a period of three years. As we watched from the windowed viewing platform several “bunny-suited” engineers were busy working on SMAP’s 6-meter reflector. In another six months or so the parts that were scattered around that clean room will be performing science in orbit!
Where space explorers are born: JPL’s Spacecraft Assembly Facility (J. Major)Randii Wessen (left) and Todd Barber (right) demonstrate… well, I’m not sure what they were demonstrating but it was very entertaining! (J. Major)
From there it was off to the JPL museum and some intimate (and highly animated!) discussions about mission technology with project formulator Randii Wessen and propulsion engineer Todd Barber. Afterward I took the opportunity to talk with Todd a bit about his role on the Cassini mission, for which he’s the lead propulsion engineer.
(You all know how much I adore Cassini, so that was a real treat.)
When we got back to Mission Control we had a chance to meet with and have photos taken with JPL’s very own “Mohawk guy” Bobak Ferdowsi, who achieved widespread fame during the internet broadcast landing of Curiosity. I had Bobak sign my toy Curiosity rover, which now has a “BF” on the back of its die-cast RTG. One for the space shelf!
The second half of the Social began early the next day — for me, very early. After getting up at 3:15 a.m. and making a two-hour drive from Pasadena to Barstow in the dark, I and the other participants met up with the Social bus in a park-and-ride lot at 6:00 just as the Sun was beginning to brighten the eastern sky. (Some had stayed overnight in Barstow, while others made the early drive out like I did.) Once the bus filled, we headed north into the Mojave to arrive at NASA’s Deep Space Network Communications Complex at Goldstone, located within the Fort Irwin military training area.
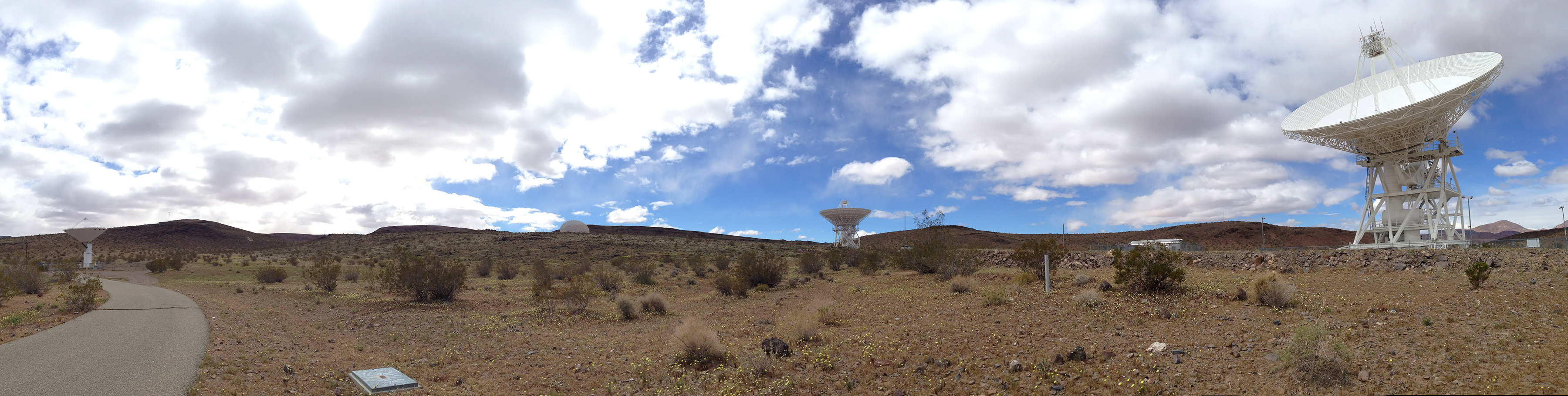
The 70-meter dish at NASA’s DSN complex at Goldstone (J. Major)
The location is rugged and remote — the perfect place to listen for the faint signals from spacecraft trundling across dusty Mars and soaring through the farthest reaches of the Solar System! The nine main DSN antennas at Goldstone are scattered across several square miles of desert, enormous dishes pointed more-or-less directly upward, aiming at the locations of distant spacecraft in order to both receive and transmit data. All of them are huge, but by far the most impressive is the gigantic 70-meter DSS-14 dish that towers above the rest in both height and width.
Recently renovated , the fully-positionable DSS-14 “Mars antenna” dish (so called because of its first mission tracking the Mariner 4 spacecraft in 1965) weighs in at 2.7 million kilograms yet “floats” atop a thin film of oil a quarter of a millimeter thick!
How smoothly does a three-thousand-ton radar dish move? We got to find out — check out the video below:
(Note: as it turned out, DSS-14 wasn’t turning to communicate with anything… the show was just for us!)
Of course, we all spent plenty of time taking pictures of the 70-meter, both inside and out — we were treated to a tour of this and several other dish sites hosted by JPL’s Jeff Osman, a specialist in the DSN antennas and their operations.
(One of us even chose to record the DSS-14 antenna with pencils and paper — watch fellow Social participant Jedediah Dore’s sketch and account of the experience here.)
Jim Erickson, JPL’s Project Manager for the Mars Rovers and MRO, speaks during the 50th Anniversary Event (J. Major)
The highlight of the day at Goldstone was (if not just being there!) was being present for the official celebration of the facility’s 50th anniversary. Featuring speakers from JPL and DSN, as well as many esteemed guests, the event — held indoors because of strong winds outside — commemorated the impact and important contributions of the complex over the past half-century of space exploration. According to speaker Jim Erickson of JPL, “There hasn’t been a time in my career when the DSN wasn’t there for us.”
After that the NASA Social group was invited to take a few moments to mingle with speakers and guests — when else would I have a chance to chat with JPL director Dr. Charles Elachi? — and then we all returned to our own meeting room where refreshments were waiting and a (quite delicious) DSN50 cake was cut and served.
It was truly a fantastic and well-planned event, giving 50 people the chance to see an integral part of our space program that, although it doesn’t usually receive the same kind of exposure that rocket launches and planetary landings enjoy, makes all of it possible.
Here’s to 50 more years of DSN and its long-distance relationship with all of our intrepid space explorers!
__________________
See what communications are currently coming in and going out of the DSN dishes — in Goldstone as well as in Madrid and Canberra — here, and learn more about the history of Goldstone here.
And a big thanks to Courtney O’Connor, Veronica McGregor, John Yembrick, and Stephanie Smith for putting this NASA Social together, Annie Wynn and Shannon Moore for setting up and organizing participant groups on Facebook and Google (which makes offsite planning so much easier), Jeff Osman and Shannon McConnell for the tours of the DSN sites and, of course, everyone at JPL and Goldstone who helped to make the event a wonderful success!
Would you like to be a part of a NASA Social? Find out what events are coming up and how to apply for them here.
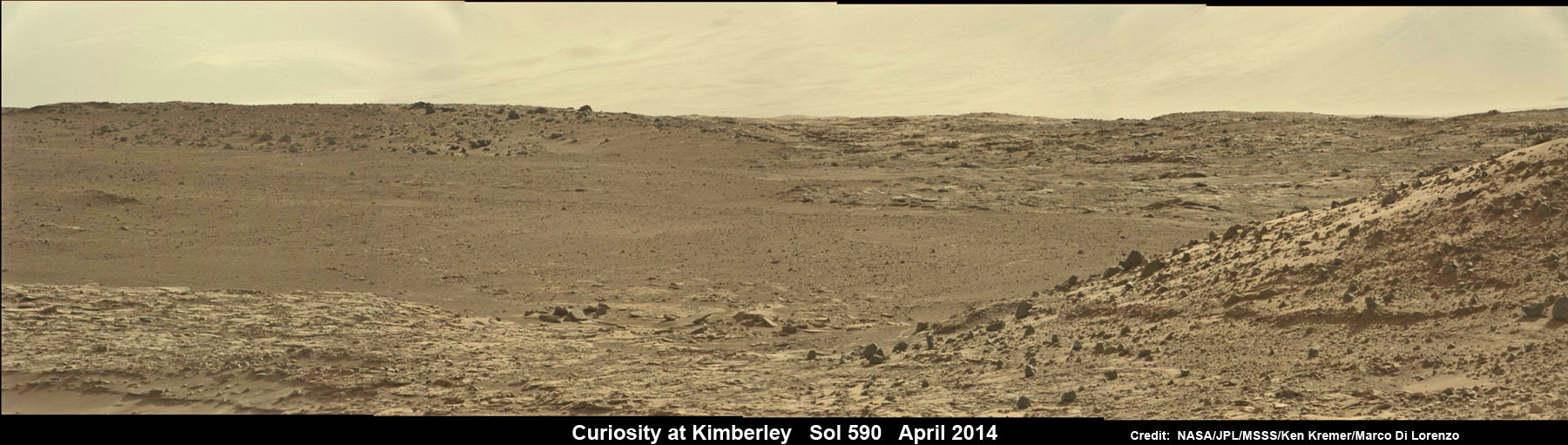
Curiosity maneuvers into ‘Kimbeley’ and scans scientifically intriguing Martian rock outcrops in search of next drilling location exhibiting several shallow hills in foreground and dramatic Gale crater rim backdrop. Rover tracks at right in this colorized Navcam photomosaic assembled from raw images snapped on Sol 589, April 3, 2014. Credit: NASA/JPL/Marco Di Lorenzo /Ken Kremer - kenkremer.com
Curiosity maneuvers into ‘Kimbeley’ and scans scientifically intriguing Martian rock outcrops in search of next drilling location exhibiting several shallow hills in foreground and dramatic Gale crater rim backdrop. Rover tracks at right in this colorized Navcam photomosaic assembled from raw images snapped on Sol 589, April 3, 2014.
Credit: NASA/JPL/Marco Di Lorenzo /Ken Kremer – kenkremer.com[/caption]
NASA’s car sized Curiosity rover has arrived at a scientifically enticing science destination at “The Kimberley Waypoint” where researchers hope to carry out the next drilling operation into alien Martian terrain in search of further clues about ancient Red Planet environments that may have been favorable for life.
“We are officially in ‘The Kimberley’ now,” Curiosity Principal Investigator John Grotzinger, of the California Institute of Technology, Pasadena, told Universe Today.
Since arriving in the Kimberley region, Curiosity’s earth-bound handlers have been maneuvering the 1 ton robot to thoroughly survey the destination dubbed “The Kimberley”.
Why was Kimberley chosen as a science destination?
“The Kimberley” has interesting, complex stratigraphy,” Grotzinger told me.
The team moved the six wheeled robot further this week in search of a suitable location to conduct the next drilling operation. The terrain is replete with diverse rock types and extensive outcrops.
I asked Grotzinger if today’s (April 5) location at ‘The Kimberley’ is the intended drill site?
“It’s a possible drill site,” Grotzinger replied.
“Pending further evaluation,” he noted.
Curiosity scans scientifically intriguing rock outcrops of Martian terrain at ‘The Kimberley’ waypoint in search of next drilling location, beside low hill at right. Mastcam color photomosaic assembled from raw images snapped on Sol 590, April 4, 2014. Credit: NASA/JPL/MSSS/Ken Kremer – kenkremer.com/Marco Di Lorenzo
Curiosity drove the final stretch of some 98 feet (30 meters) on Wednesday, April 2, required to arrive at a major stopping waypoint planned since early 2013 for up close study of the Red Planet’s rocks.
Along the recent dune filled path to ‘The Kimberley’, Curiosity snapped breathtaking landscapes around the irresistible ‘Junda’ outcrop, much like a tourist.
See our photomosaics showing the spectacularly inviting terrain around Kimberly and Junda, above and below, by Marco Di Lorenzo and Ken Kremer.
Martian landscape with rows of curved rock outcrops at ‘Kimberly’ in the foreground and spectacular Mount Sharp on the horizon. NASA’s Curiosity Mars rover pulled into Kimberly waypoint dominated by layered rock outcrops as likely drilling site. This colorized navcam camera photomosaic was assembled from imagery taken on Sol 576 (Mar. 20, 2014). Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer-kenkremer.com
The state-of-the-art robot now sits at a vantage point at “The Kimberley” enabling a detailed photographic survey of the rock exposures and surroundings with the high resolution Mastcam cameras.
The new imagery will be used to select the most scientifically productive drilling locations.
“It is named after a remote region of western Australia,” Grotzinger informed me.
The team chose Kimberley because its lies at the intersection of four different types of rocks, including striated rocks overlain by others and deposited in a decipherable geological relationship to each other.
Researchers directed Curiosity on a pinpoint drive to ‘Kimberley’ after high resolution imagery and mineral mapping spectrometry gathered by NASA’s powerful telescopic cameras aboard the Mars Reconnaissance Orbiter (MRO) circling overhead piqued their interest.
Curiosity looks back at Martian sand dunes and rover tracks after passing by Junda outcrop (right) on Sol 548 (Feb. 19, 2014) with Gale Crater rim and Mount Sharp on the distant horizon. Navcam colorized photomosaic. Credit: NASA/JPL-Caltech/Ken Kremer- kenkremer.com/Marco Di Lorenzo
“This is the spot on the map we’ve been headed for, on a little rise that gives us a great view for context imaging of the outcrops at the Kimberley,” said Melissa Rice, Curiosity science planning lead, of Caltech.
The team expects Curiosity to investigate Kimberley for several weeks of observations, including sample-drilling and onboard laboratory analysis of the area’s rocks with the CheMin and SAM miniaturized chemistry labs.
If drilling is warranted, Kimberley would be the site of Curiosity’s first drilling operation since boring into the ‘John Klein’ and ‘Cumberland’ outcrop targets during the spring of 2013 at Yellowknife Bay.
The robot has conducted cleaning activities of SAM, CheMin and the CHIMRA sample handling mechanism in anticipation of boring into the Martian outcrops and delivering powdery, pulverized samples of cored Martian rocks to SAM and CheMin – waiting patiently inside the robots belly to eat something exciting from the Red Planet.
Curiosity departed the Yellowknife Bay region in July 2013 where she discovered a habitable zone and thereby accomplished the primary goal of the mission.
To date, Curiosity’s odometer totals 3.8 miles (6.1 kilometers) since landing inside Gale Crater on Mars in August 2012. She has taken over 137,000 images.
The sedimentary foothills of Mount Sharp, which reaches 3.4 miles (5.5 km) into the Martian sky, is the 1 ton robots ultimate destination inside Gale Crater because it holds caches of water altered minerals. Such minerals could possibly indicate locations that sustained potential Martian life forms, past or present, if they ever existed.
Curiosity has some 4 kilometers to go to reach the base of Mount Sharp.
She may arrive at the lower reaches of Mount Sharp sometime in the latter half of 2014, but must first pass through a potentially treacherous dune field.
Stay tuned here for Ken’s continuing Curiosity, Opportunity, Chang’e-3, SpaceX, Orbital Sciences, LADEE, MAVEN, MOM, Mars and more planetary and human spaceflight news.
Learn more at Ken’s upcoming presentations at the NEAF convention on April 12/13 and at Washington Crossing State Park, NJ on April 6.
Map of Curiosity Mars Rover’s Drives to ‘the Kimberley’ Waypoint. This map shows the route driven by NASA’s Curiosity Mars rover during March and April 2014 in its approach to and arrival at a waypoint called “the Kimberley,” which rover team scientists chose in 2013 as the location for the mission’s next major investigations. Credit: NASA/JPL-Caltech/Univ. of Arizona
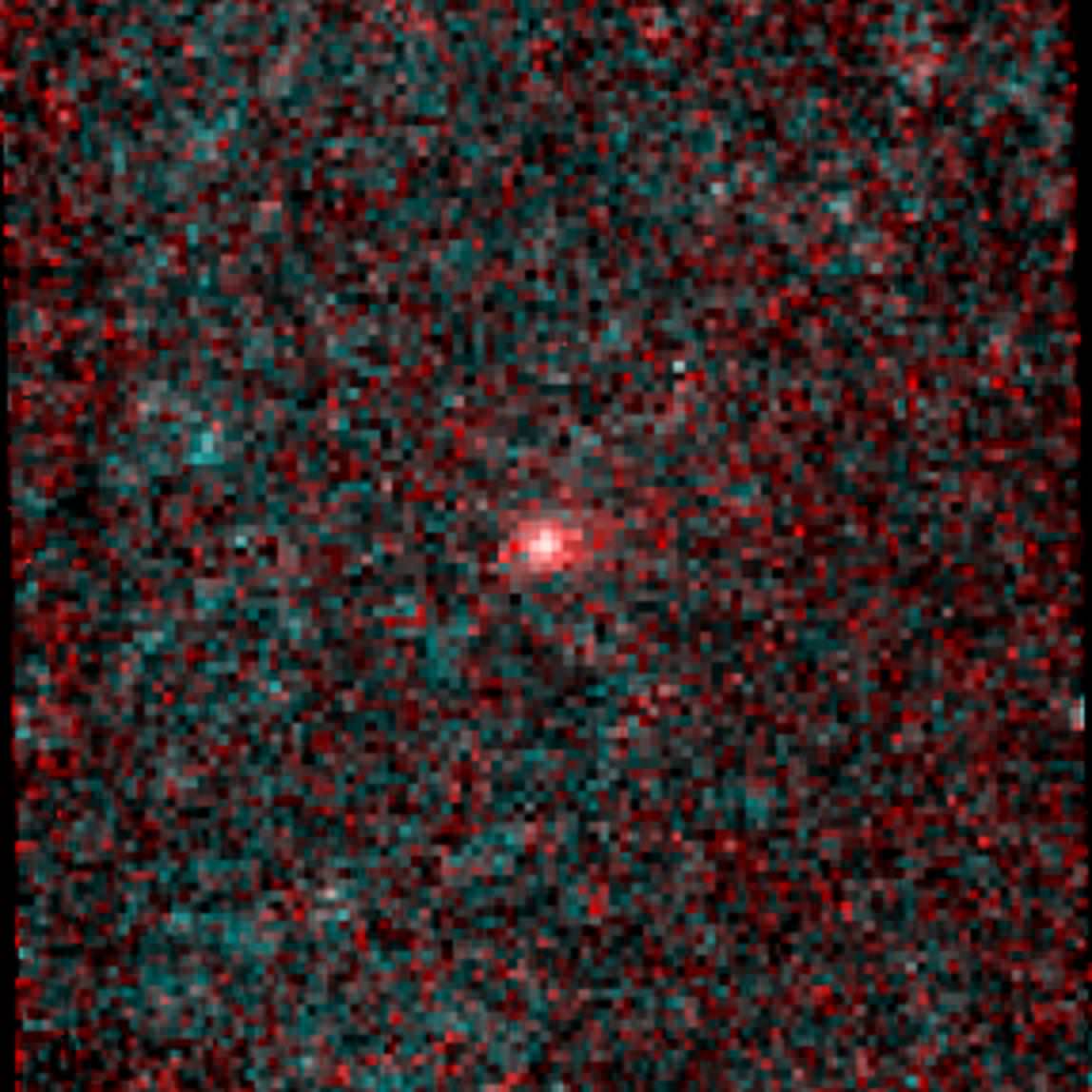
Infrared image of comet NEOWISE (C/2014 C3). Credit: NASA/JPL-Caltech
NASA’s NEOWISE mission — formerly known as just WISE — has identified the first comet of its new near-Earth object hunting career… and, according to mission scientists, it’s a “weirdo.”
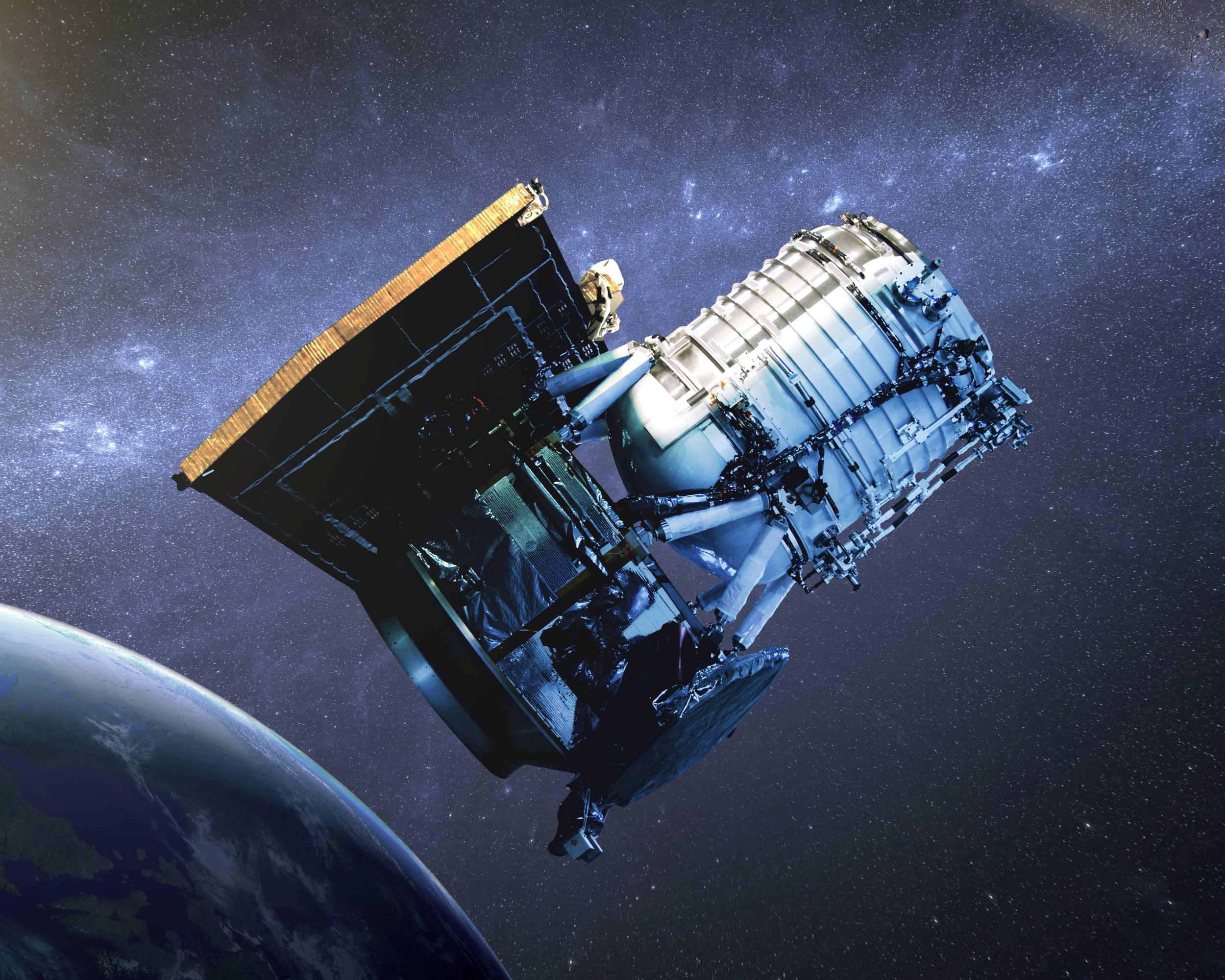
In its former life NASA’s WISE (Wide-field Infrared Survey Explorer) spacecraft scanned the entire sky in infrared wavelengths. It helped discover the galaxy’s coldest stars, the Universe’s brightest galaxies, and some of the darkest asteroids lurking in the main asteroid belt between Mars and Jupiter… as well as closer in to Earth’s neck of the woods.
After exhausting its supply of liquid coolant needed to shield itself from its own radiating heat, in 2011 WISE was put into a state of hibernation. It was awoken last year and rebranded NEOWISE, and set upon the task of locating unknown objects with orbits in the proximity of Earth’s.
Artist’s impression of the WISE satellite
To date several new asteroids have already been found by NEOWISE, and on February 14, 2014, it spotted its first comet.
“We are so pleased to have discovered this frozen visitor from the outermost reaches of our solar system,” said Amy Mainzer, NEOWISE principal investigator at JPL. “This comet is a weirdo — it is in a retrograde orbit, meaning that it orbits the sun in the opposite sense from Earth and the other planets.”
Designated “C/2014 C3 (NEOWISE),” the comet was 143 million miles (230 million km) away in the image above — a composite made from six infrared exposures. That’s 585 times the distance to the Moon, or about the average distance between the Earth and Mars.
The tail of the comet NEOWISE extends about 25,000 miles (40,000 km) to the right in the image.
Overall, C/2014 C3 (NEOWISE) was spotted six times before it moved out of range of the spacecraft’s view. The comet has a highly-eccentric 20-year orbit that takes it high above the plane of the Solar System and out past the orbit of Jupiter. Technically, with a perihelion distance greater than 1.3 AU, comet C/2014 C3 does not classify as a near-Earth object (and its orbit does not intersect Earth’s.) But it’s still good to know that NEOWISE is looking out for us.
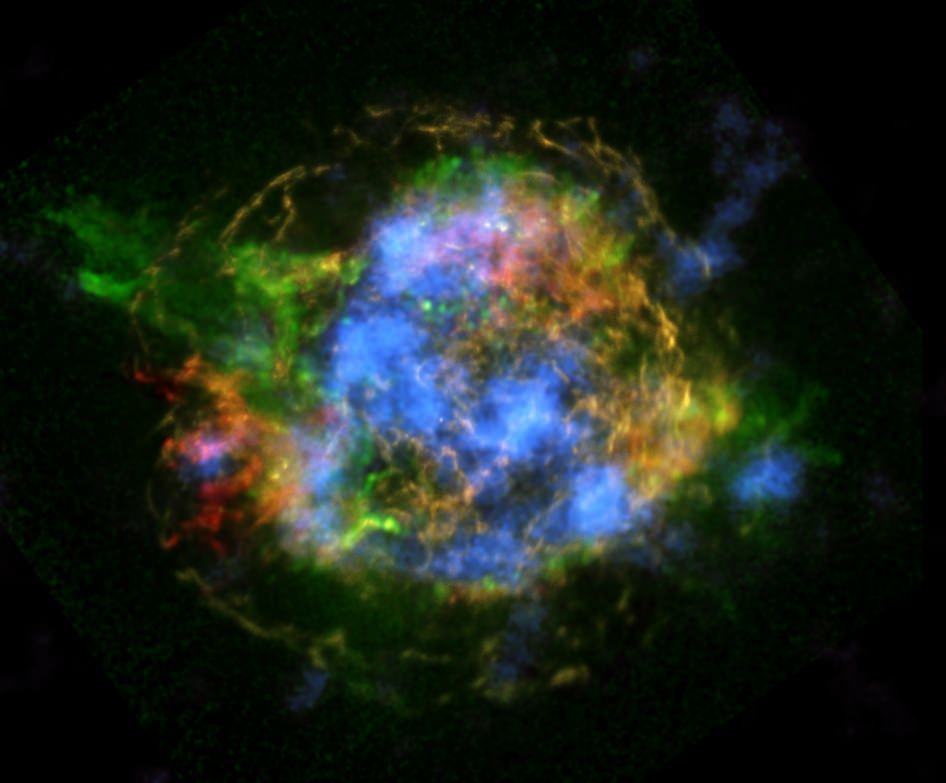
NASA's NuSTAR is revealing the mechanics behind Cassiopeia A's supernova explosion (Image credit: NASA/JPL-Caltech/CXC/SAO)
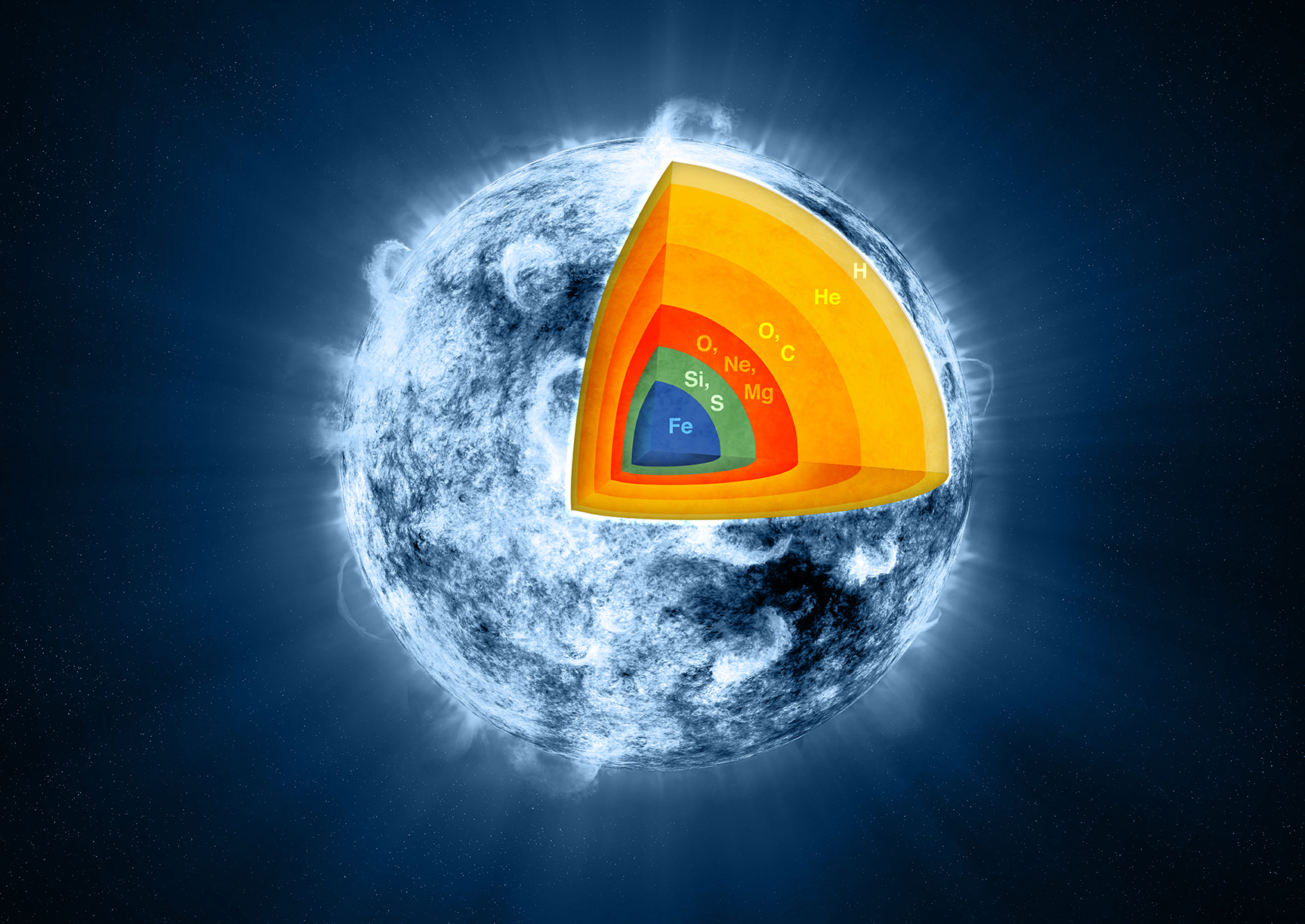
Supernovas are some of the most energetic and powerful events in the observable Universe. Briefly outshining entire galaxies, they are the final, dying outbursts of stars several times more massive than our Sun. And while we know supernovas are responsible for creating the heavy elements necessary for everything from planets to people to power tools, scientists have long struggled to determine the mechanics behind the sudden collapse and subsequent explosion of massive stars.
Now, thanks to NASA’s NuSTAR mission, we have our first solid clues to what happens before a star goes “boom.”
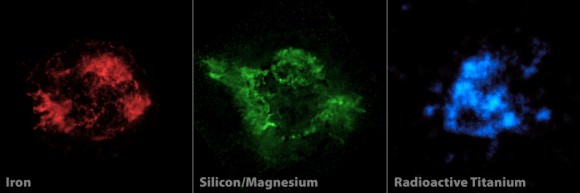
The image above shows the supernova remnant Cassiopeia A (or Cas A for short) with NuSTAR data in blue and observations from the Chandra X-ray Observatory in red, green, and yellow. It’s the shockwave left over from the explosion of a star about 15 to 25 times more massive than our Sun over 330 years ago*, and it glows in various wavelengths of light depending on the temperatures and types of elements present.
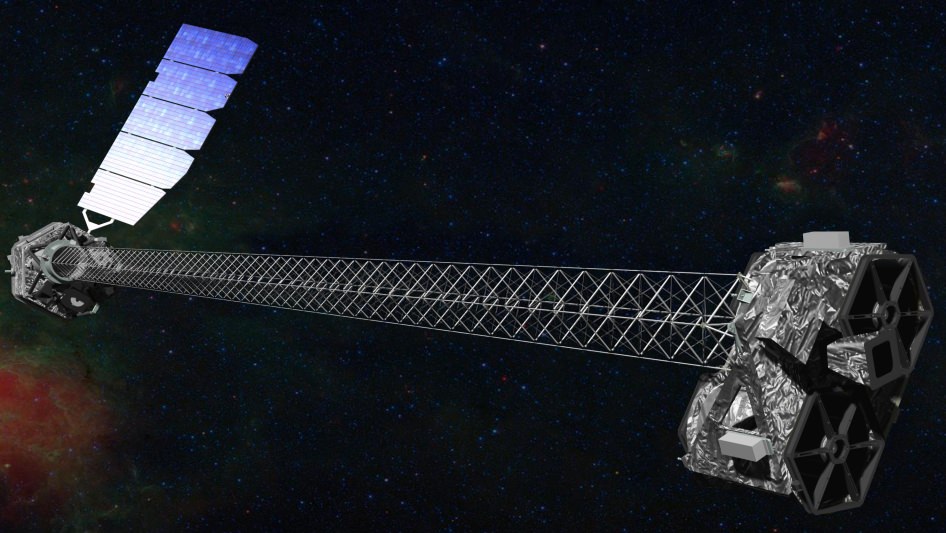
Artist’s concept of NuSTAR in orbit. (NASA/JPL-Caltech)
Previous observations with Chandra revealed x-ray emissions from expanding shells and filaments of hot iron-rich gas in Cas A, but they couldn’t peer deep enough to get a better idea of what’s inside the structure. It wasn’t until NASA’s Nuclear Spectroscopic Telescope Array — that’s NuSTAR to those in the know — turned its x-ray vision on Cas A that the missing puzzle pieces could be found.
And they’re made of radioactive titanium.
Many models have been made (using millions of hours of supercomputer time) to try to explain core-collapse supernovas. One of the leading ones has the star ripped apart by powerful jets firing from its poles — something that’s associated with even more powerful (but focused) gamma-ray bursts. But it didn’t appear that jets were the cause with Cas A, which doesn’t exhibit elemental remains within its jet structures… and besides, the models relying on jets alone didn’t always result in a full-blown supernova.
As it turns out, the presence of asymmetric clumps of radioactive titanium deep within the shells of Cas A, revealed in high-energy x-rays by NuSTAR, point to a surprisingly different process at play: a “sloshing” of material within the progenitor star that kickstarts a shockwave, ultimately tearing it apart.
Watch an animation of how this process occurs:
The sloshing, which occurs over a time span of a mere couple hundred milliseconds — literally in the blink of an eye — is likened to boiling water on a stove. When the bubbles break through the surface, the steam erupts.
Only in this case the eruption leads to the insanely powerful detonation of an entire star, blasting a shockwave of high-energy particles into the interstellar medium and scattering a periodic tableful of heavy elements into the galaxy.
In the case of Cas A, titanium-44 was ejected, in clumps that echo the shape of the original sloshing asymmetry. NuSTAR was able to image and map the titanium, which glows in x-ray because of its radioactivity (and not because it’s heated by expanding shockwaves, like other lighter elements visible to Chandra.)
“Until we had NuSTAR we couldn’t really see down into the core of the explosion,” said Caltech astronomer Brian Grefenstette during a NASA teleconference on Feb. 19.
Illustration of the pre-supernova star in Cassiopeia A. It’s thought that its layers were “turned inside out” just before it detonated. (NASA/CXC/M.Weiss)
“Previously, it was hard to interpret what was going on in Cas A because the material that we could see only glows in X-rays when it’s heated up. Now that we can see the radioactive material, which glows in X-rays no matter what, we are getting a more complete picture of what was going on at the core of the explosion.”
– Brian Grefenstette, lead author, Caltech
Okay, so great, you say. NASA’s NuSTAR has found the glow of titanium in the leftovers of a blown-up star, Chandra saw some iron, and we know it sloshed and ‘boiled’ a fraction of a second before it exploded. So what?
“Now you should care about this,” said astronomer Robert Kirshner of the Harvard-Smithsonian Center for Astrophysics. “Supernovae make the chemical elements, so if you bought an American car, it wasn’t made in Detroit two years ago; the iron atoms in that steel were manufactured in an ancient supernova explosion that took place five billion years ago. And NuSTAR shows that the titanium that’s in your Uncle Jack’s replacement hip were made in that explosion too.
“We’re all stardust, and NuSTAR is showing us where we came from. Including our replacement parts. So you should care about this… and so should your Uncle Jack.”
And it’s not just core-collapse supernovas that NuSTAR will be able to investigate. Other types of supernovas will be scrutinized too — in the case of SN2014J, a Type Ia that was spotted in M82 in January, even right after they occur.
“We know that those are a type of white dwarf star that detonates,” NuSTAR principal investigator Fiona Harrison responded to Universe Today during the teleconference. “This is very exciting news… NuSTAR has been looking at [SN2014J] for weeks, and we hope to be able to say something about that explosion as well.”
Previous imaging with Chandra (left, middle) is combined with new data from NuSTAR (right) to make a complete image of a supernova remnant. (NASA/JPL-Caltech/CXC/SAO)
One of the most valuable achievements of the recent NuSTAR findings is having a new set of observed constraints to place on future models of core-collapse supernovas… which will help provide answers — and likely new questions — about how stars explode, even hundreds or thousands of years after they do.
“NuSTAR is pioneering science, and you have to expect that when you get new results, it’ll open up as many questions as you answer,” said Kirshner.
Launched in June of 2012, NuSTAR is the first focusing hard X-ray telescope to orbit Earth and the first telescope capable of producing maps of radioactive elements in supernova remnants.
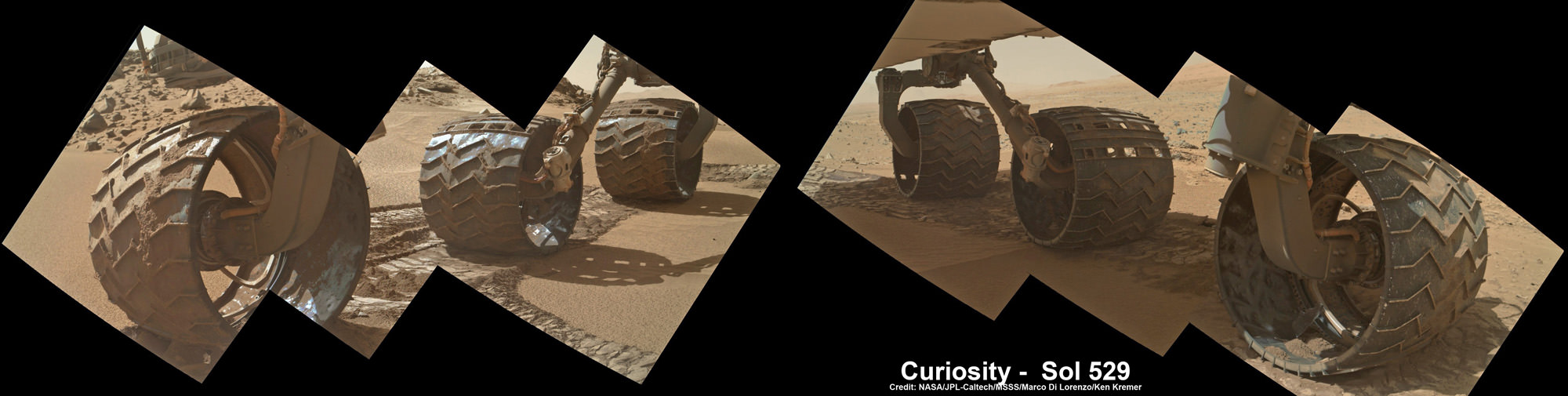
Up close photomosaic view shows lengthy tear in rover Curiosity’s left front wheel caused by recent driving over sharp edged Martian rocks on the months long trek to Mount Sharp. Raw images taken by the MAHLI camera on Curiosity’s arm on Jan. 31, 2014 (Sol 529) were assembled to show some recent damage to several of its six wheels Credit: NASA / JPL / MSSS / Marco Di Lorenzo / Ken Kremer- kenkremer.com See below complete 6 wheel mosaic and further wheel mosaics for comparison
Up close photomosaic view shows lengthy tear in rover Curiosity’s left front wheel caused by recent driving over sharp edged Martian rocks on the months long trek to Mount Sharp. The team is evaluating an alternate, smoother way forward to next science target. Raw images taken by the MAHLI camera on Curiosity’s arm on Jan. 31, 2014 (Sol 529) were assembled to show some recent damage to several of its six wheels.
Credit: NASA / JPL / MSSS / Marco Di Lorenzo / Ken Kremer- kenkremer.com
See below complete 6 wheel mosaic and ‘Dingo Gap’ dune alternate route mosaic plus 3-D view[/caption]
Continuing wheel damage from hoards of sharp edged Martian rocks are forcing engineers to seek a smoother pathway forward – potentially through a treacherous dune field – for NASA’s Curiosity rover on the jagged rock strewn road to Mount Sharp, her primary science destination.
Ever since rover engineers noticed holes and tears to the robots six aluminum wheels this past fall and winter 2013, the team has been photographing the wheels much more frequently and carefully assessing their condition. See our mosaics above and below.
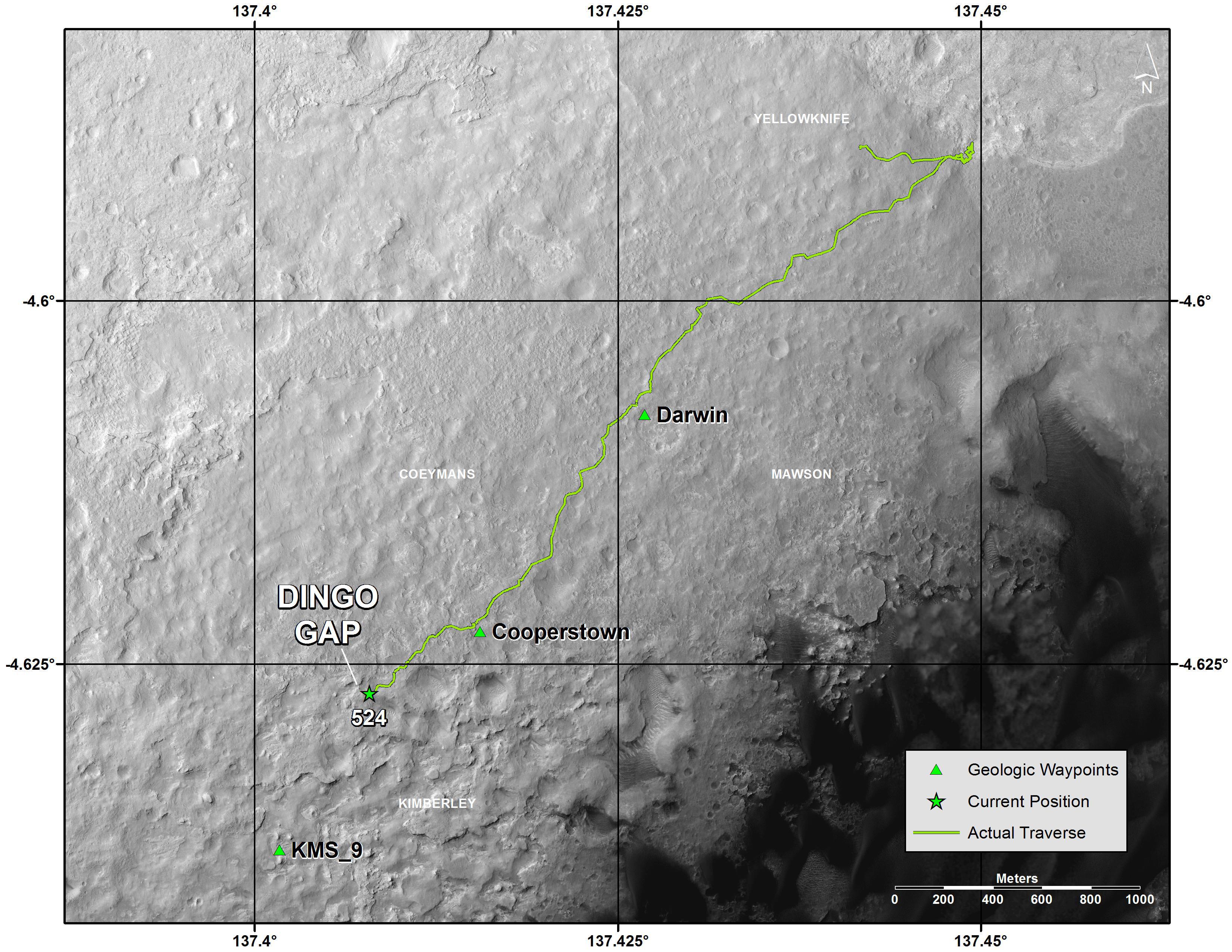
Curiosity’s handlers are now considering diverting the SUV-sized robot to an alternate path crossing into a dune field and the valley beyond that entails traversing through much smoother Martian terrain to reach a highly desirable and nearby science destination called “KMS-9.”
Newly received images taken by the robot only on Friday, Jan. 31, reveal a very significant ragged looking puncture at least 2 to 3 inches (5 to 8 cm) in length and a inch or so (3 cm) wide that’s bent back to the inside of the left front wheel.
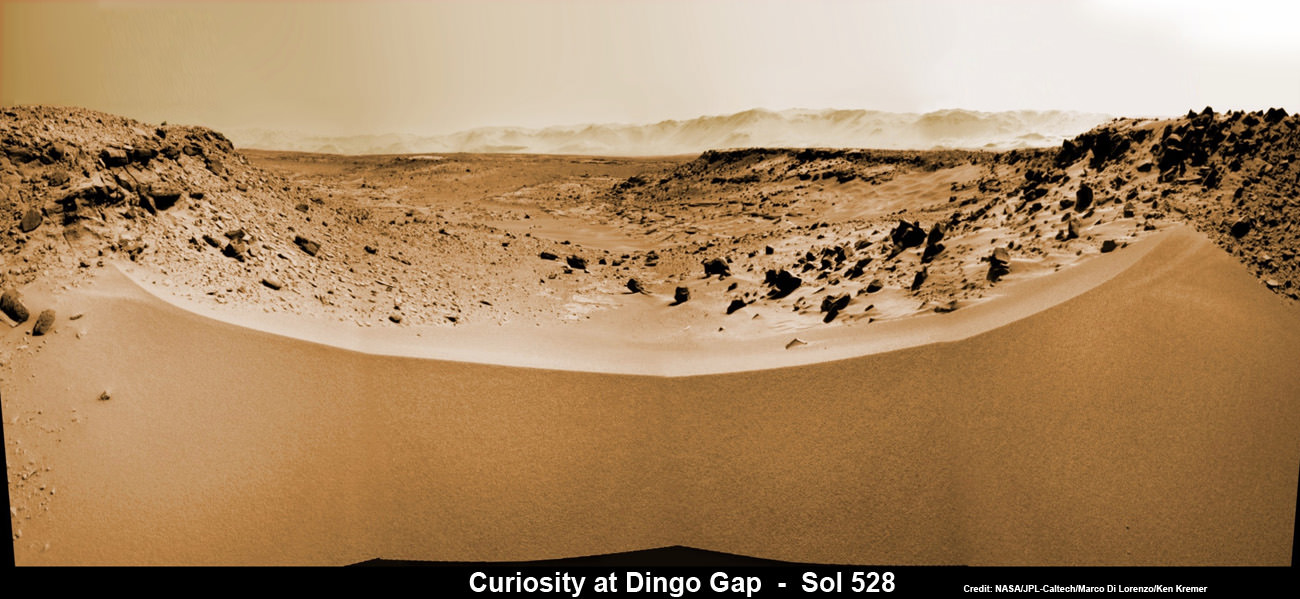
Curiosity’s View Past Tall Dune at edge of ‘Dingo Gap’
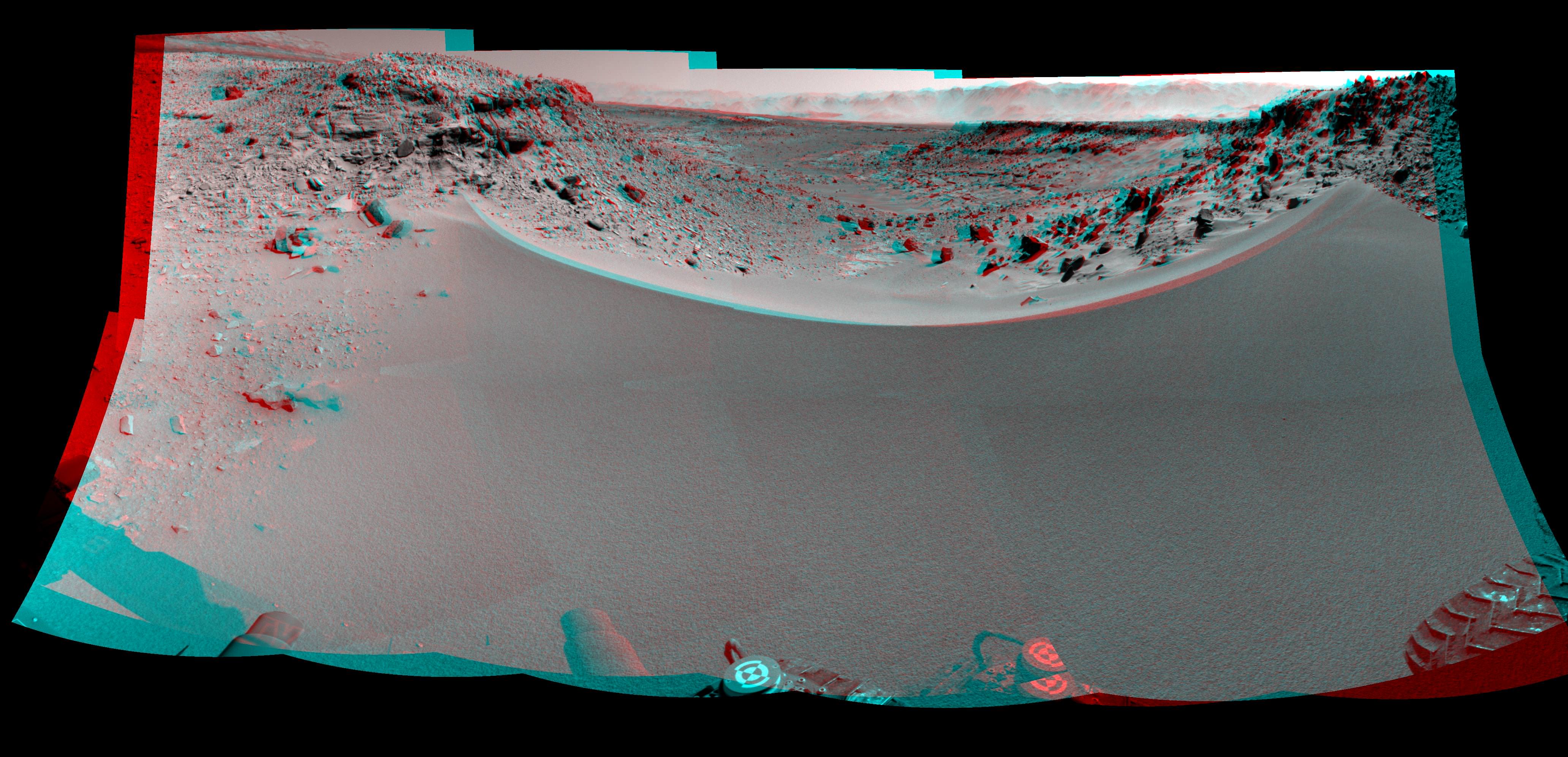
This photomosaic from Curiosity’s Navigation Camera (Navcam) taken at the edge of the entrance to the Dingo Gap shows a 3 foot (1 meter) tall dune and valley terrain beyond to the west, all dramatically back dropped by eroded rim of Gale Crater. View from the rover’s current position on Sol 528 (Jan. 30, 2014). The rover team may decide soon whether Curiosity will bridge the dune gap as a smoother path to next science destination. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer- kenkremer.com
See NASA’s 3-D view of Dingo Gap below
Unfortunately, the fields of rough Red Planet rocks have not been a blessing to the 1 ton behemoth.
See our new underbelly mosaic view of Curiosity’s holy wheels (above and below) snapped on Jan. 31, (Sol 529), that’s aimed at the interior and which vividly shows the extent of the injury to the 20 inch diameter wheel.
Photomosaic shows new holes and tears in several of rover Curiosity’s six wheels caused by recent driving over sharp edged Martian rocks on the months long trek to Mount Sharp. Raw images taken by the MAHLI camera on Curiosity’s arm on Jan. 31, 2014 (Sol 529) were assembled to show some recent damage to several of its six wheels. Credit: NASA / JPL / MSSS / Marco Di Lorenzo / Ken Kremer- kenkremer.com
The rate of wheel damage has picked up dramatically as the driving pace accelerated across the rugged, rock filled Martian terrain over the past six months and put over 4.89 kilometers (3.04 mi.) on the odometer to date since the nailbiting August 2012 landing.
The mega robot is now standing at the edge of the dune field by the picturesque entrance known as the “Dingo Gap” after driving another 865 feet (264.7 meters) during January 2014.
You can see the increased damage resulting from the past months drive by comparing the new Sol 529 view with our underbelly mosaic from Sol 490 in December 2013.
Photomosaic shows new holes and tears in several of rover Curiosity’s six wheels caused by recent driving over sharp edged Martian rocks on the months long trek to Mount Sharp. Raw images taken by the MAHLI camera on Curiosity’s arm on Dec. 22, 2013 (Sol 490) were assembled to show some recent damage to several of its six wheels – most noticeably the two here in middle and front. Credit: NASA / JPL / MSSS / Marco Di Lorenzo / Ken Kremer- kenkremer.com
However, the dune cutting across “Dingo Gap” measures about 3 feet (1 meter) in height.
Look at this 3-D “Dingo Gap” mosaic view from NASA and you can judge for yourself the choices the team faces.
Curiosity’s 3-D View Past Tall Dune at edge of ‘Dingo Gap’
This stereo mosaic of images from the Navigation Camera (Navcam) on Curiosity shows the terrain to the west from the rover’s position on Sol 528 (Jan. 30, 2014). The scene appears three dimensional when viewed through red-blue glasses with the red lens on the left. The view was taken just after Curiosity had arrived at the eastern edge of a location called “Dingo Gap.” A dune across the gap is about 3 feet (1 meter) high in the middle and tapered at south (left) and north (right) ends onto low scarps on either side of the gap. The rover team is evaluating possible driving routes on the other side before a decision whether the cross the gap. Credit: NASA/JPL-Caltech
So the team is evaluating whether that’s safe to bridge because they don’t want to get stuck in a hidden sand trap like the one that ultimately led to Spirit’s demise a few years back.
“The decision hasn’t been made yet, but it is prudent to go check,” said Jim Erickson of NASA’s Jet Propulsion Laboratory, Pasadena, Calif., project manager for Curiosity, in a NASA statement.
Up close view of hole in one of rover Curiosity’s six wheels caused by recent driving over rough Martian rocks. Mosaic assembled from Mastcam raw images taken on Dec. 22, 2013 (Sol 490). Credit: NASA/JPL/MSSS/Ken Kremer -kenkremer.com/Marco Di Lorenzo
“We’ll take a peek over the dune into the valley immediately to the west to see whether the terrain looks as good as the analysis of orbital images implies,” Erickson added, based on orbital images snapped by the High Resolution Imaging Science Experiment (HiRISE) camera on NASA’s Mars Reconnaissance Orbiter (MRO) circling overhead.
The team is also testing an array of different driving techniques to minimize the accumulation of wheel punctures, such as driving backwards or using only four of the six wheels to reduce the force of the wheels pushing against jagged rocks.
The “Dingo Gap” could offer a safer gateway to “KMS-9” along the journey of the rovers southwestwardly route to breathtaking foothills of Mount Sharp.
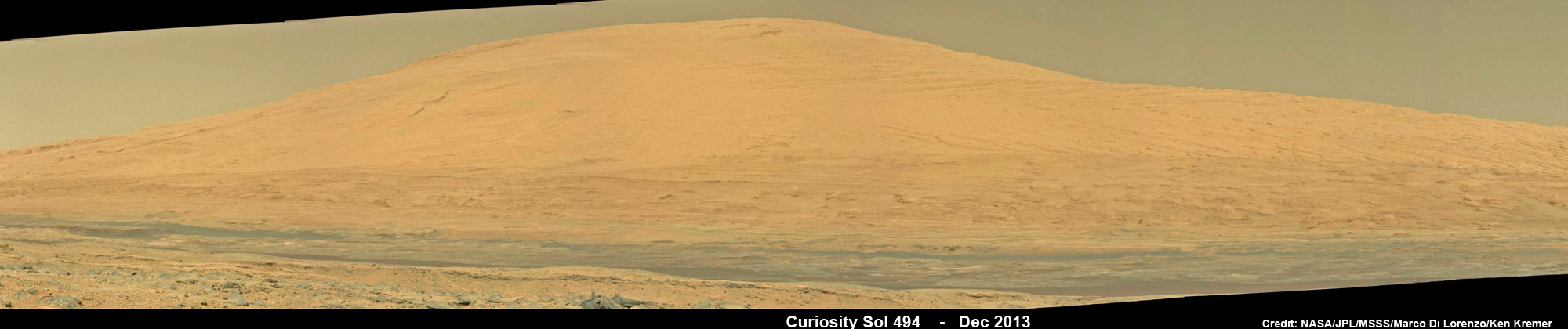
Curiosity Celebrates 500 Sols on Mars on Jan. 1, 2014. NASA’s Curiosity rover snaps fabulous new mosaic spying towering Mount Sharp destination looming dead ahead with her high resolution color cameras, in this cropped view. Imagery assembled from Mastcam raw images taken on Dec. 26, 2013 (Sol 494). Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer- kenkremer.com
Dingo Gap lies between two low scarps and that is tapered off at both sides to the north and south.
KMS-9 is a potentially science rich target where the team hopes to conduct the first rock drilling operations since departing the Yellowknife Bay quadrant in July 2013.
The candidate drilling site lies only about half a mile (800 meters) away as the martian crow flies and features geology that’s appealing to the science team. But the roving routes under consideration are all much farther in actual distance.
“At KMS-9, we see three terrain types exposed and a relatively dust-free surface,” said science team collaborator Katie Stack of the California Institute of Technology, Pasadena.
Curiosity has already accomplished her primary goal of discovering a habitable zone on Mars that could support Martian microbes if they ever existed.
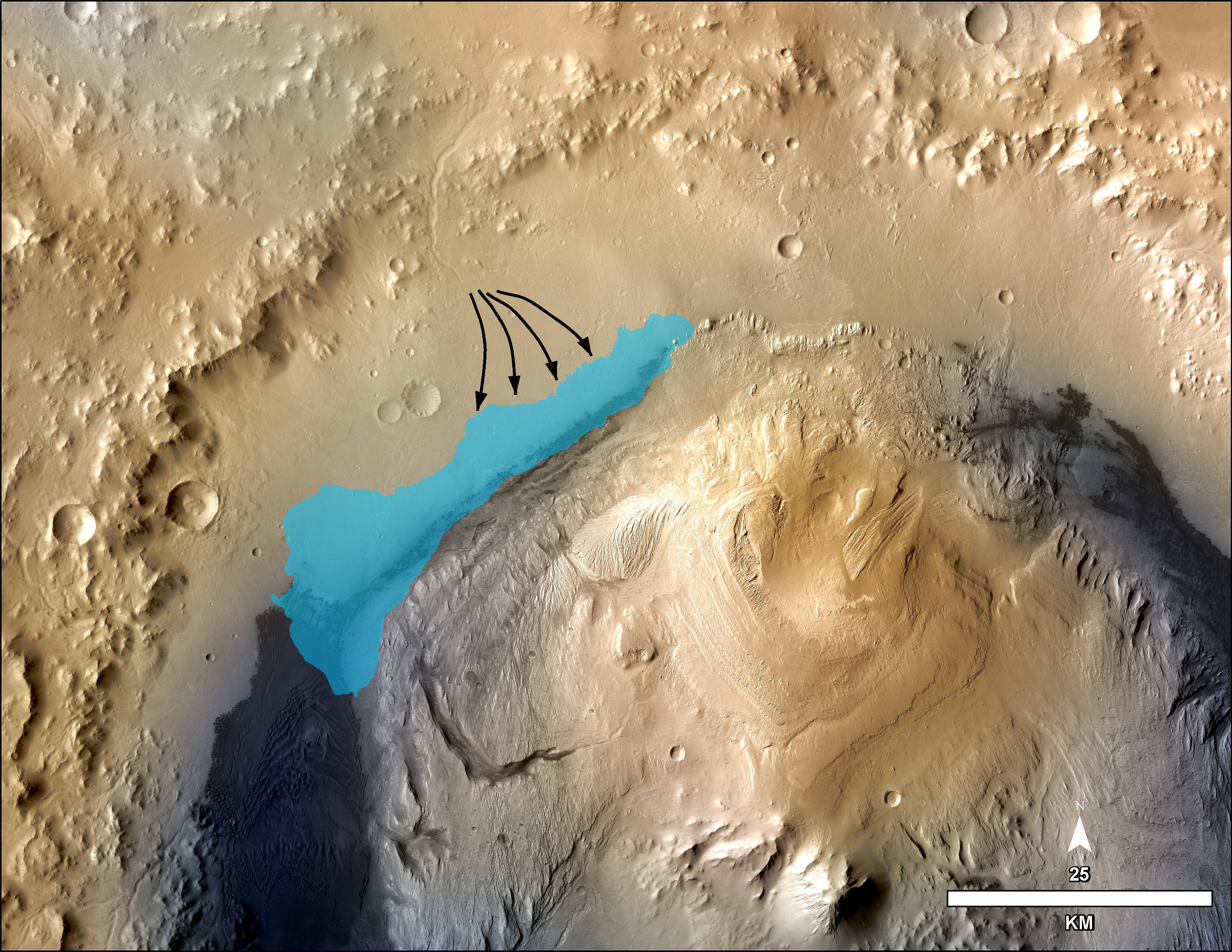
NASA’s rover Curiosity uncovered evidence that an ancient Martian lake had the right chemical ingredients, including clay minerals that could have sustained microbial life forms for long periods of time – and that these habitable conditions persisted on the Red Planet until a more recent epoch than previously thought.
As a result, the science team has shifted the missions focus to include the search for organic molecules – the building blocks of life as we know it – which may be preserved in the sedimentary rock layers of Mount Sharp.
“Really what we’re doing is turning the corner from a mission that is dedicated to the search for habitable environments to a mission that is now dedicated to the search for that subset of habitable environments which also preserves organic carbon,” Curiosity Principal Investigator John Grotzinger, of the California Institute of Technology in Pasadena, said recently at the Dec. 2013 annual meeting of the American Geophysical Union (AGU).
Meanwhile, NASA’s Opportunity rover is exploring clay mineral outcrops by the summit of Solander Point on the opposite side of the Mars at the start of her 2nd Decade investigating the Red Planets mysteries.
Read my new story about the Top 10 Decade 1 discoveries of Spirit and Opportunity – here.
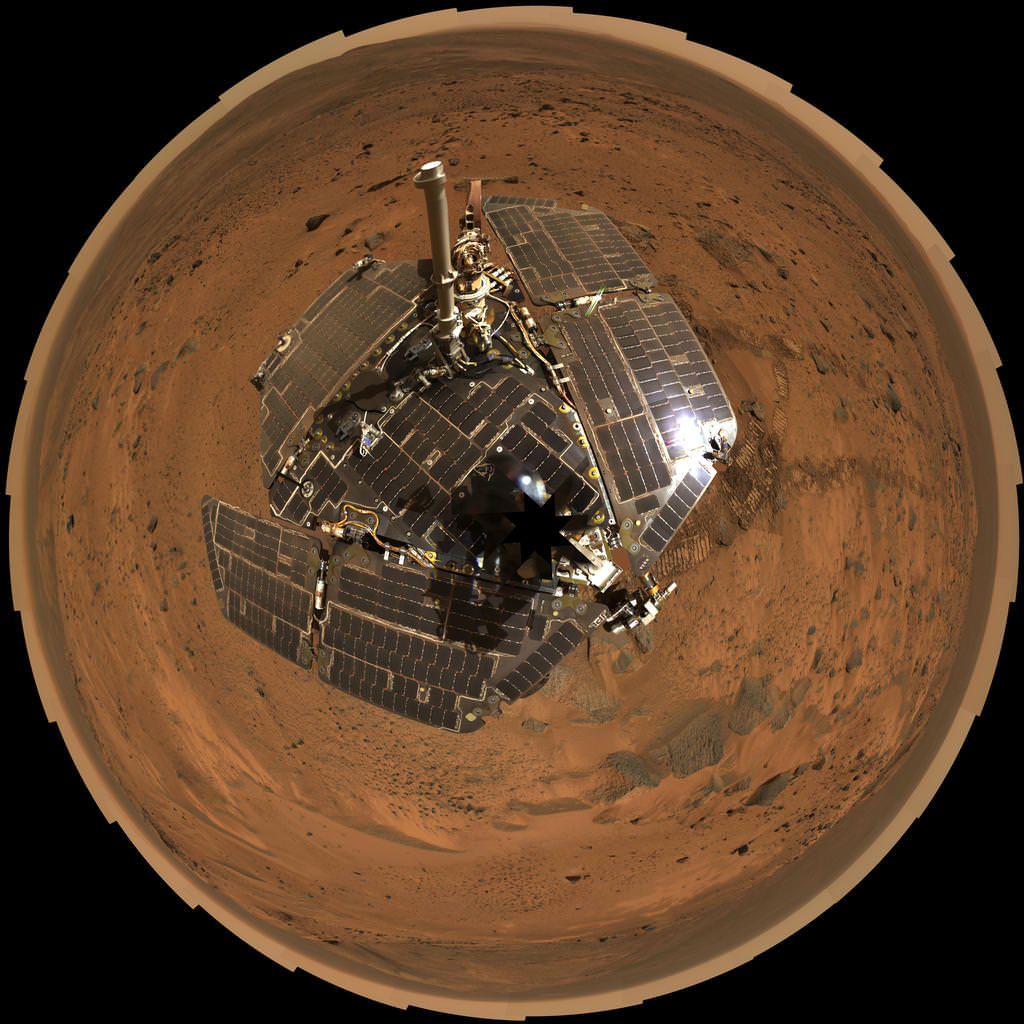
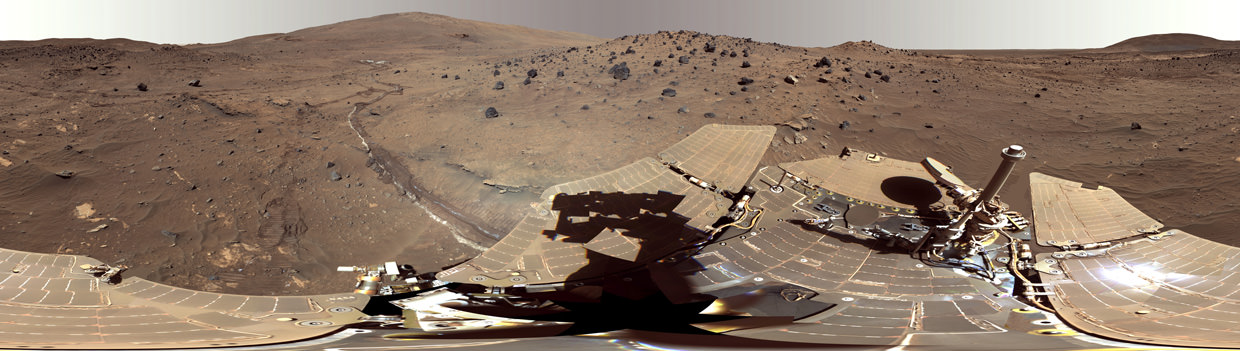
This bird's-eye view from August 2005 combines a self-portrait of the spacecraft deck and a panoramic mosaic of the Martian surface as viewed by NASA's Mars Exploration Rover Spirit. The rover's solar panels are still gleaming in the sunlight, having acquired only a thin veneer of dust two years after the rover landed and commenced exploring the red planet. Spirit captured this 360-degree panorama on the summit of "Husband Hill" inside Mars' Gusev Crater. During the period from Spirit's Martian days, or sols, 583 to 586 (Aug. 24 to 27, 2005), the rover's panoramic camera acquired the hundreds of individual frames for this largest panorama ever photographed by Spirit. Credit: NASA/JPL-Caltech/Cornell
Ten Years Ago, Spirit Rover Lands on Mars
This bird’s-eye view from August 2005 combines a self-portrait of the spacecraft deck and a panoramic mosaic of the Martian surface as viewed by NASA’s Mars Exploration Rover Spirit. The rover’s solar panels are still gleaming in the sunlight, having acquired only a thin veneer of dust two years after the rover landed and commenced exploring the red planet. Spirit captured this 360-degree panorama on the summit of “Husband Hill” inside Mars’ Gusev Crater. During the period from Spirit’s Martian days, or sols, 583 to 586 (Aug. 24 to 27, 2005), the rover’s panoramic camera acquired the hundreds of individual frames for this largest panorama ever photographed by Spirit. Credit: NASA/JPL-Caltech/Cornell
See Spirit’s 1st and last panoramas and more imagery below[/caption]
Today, Jan. 3, marks the 10th anniversary since the safe landing of NASA’s renowned Spirit rover on the plains of Mars on Jan. 3, 2004.
Spirit comprises one half of NASA’s now legendary pair of Mars Exploration Rovers (MER). Opportunity, her twin sister landed, on the opposite side of the Red Planet three weeks later – on Jan. 24, 2004. The goal was to “follow the water” as a potential enabler for past Martian microbes if they ever existed.
Together, the long-lived, golf cart sized robots proved that early Mars was warm and wet, billions of years ago – a key finding in the search for habitats conducive to life beyond Earth.
Exactly a decade ago, the famous robot survived the scorching atmospheric heating of the 6 minute plunge through the thin Martian atmosphere, bounced some two dozen times cocooned inside cushioning airbags, and gradually rolled to a stop inside 100 mile wide Gusev Crater. It was known as the “6 minutes of Terror”.
The three petaled landing pad opened and Spirit was dramatically born in a milestone event that will be forever remembered in the annuls of history because of the groundbreaking scientific discoveries that ensued and the unbelievable longevity of the twins.
Ten Years Ago, Spirit Rover Lands on Mars
This mosaic image taken on Jan. 4, 2004, by the navigation camera on the Mars Exploration Rover Spirit, shows a 360 degree panoramic view of the rover on the surface of Mars. Spirit operated for more than six years after landing in January 2004 for what was planned as a three-month mission. Credit: NASA/JPL
Before they were launched atop Delta II rockets in the summer of 2003 from Cape Canaveral, the dynamic, solar powered robo duo were expected to last a mere three months – with a ‘warranty’ of 90 Martian days (Sols).
Either dust accumulation on the life giving solar panels, an engineering issue or the extremely harsh Martian environment was expected to somehow terminate them mercilessly.
In reality, both robots enormously exceeded expectations and accumulated a vast bonus time of exploration and discovery in numerous extended mission phases.
‘McMurdo’ Panorama from Spirit’s ‘Winter Haven’
This beautiful scene reveals a tremendous amount of detail in Spirit’s surroundings at a place called “Winter Haven,” where the rover spent many months parked on a north-facing slope in order to keep its solar panels pointed toward the sun for the winter. During this time, it captured several images to create this high resolution panorama. During that time, while the rover spent the daylight hours conducting as much scientific research as possible, science team members assigned informal names to rock outcrops, boulders, and patches of soil commemorating exploration sites in Antarctica and the southernmost islands of South America. Antarctic bases are places where researchers, like the rovers on Mars, hunker down for the winter in subzero temperatures. During the past Martian winter, Spirit endured temperatures lower than minus 100 degrees Celsius (minus 148 degrees Fahrenheit). Credit: NASA/JPL/Cornell
No one foresaw that Martian winds would occasionally clean the solar panels to give them a new lease on life or that the components would miraculously continue functioning.
Spirit endured the utterly extreme Red Planet climate for more than six years until communications ceased in 2010.
Opportunity is still roving Mars today, and doing so in rather good condition!
Altogether, Spirit drove 4.8 miles (7.73 kilometers),that’s about 12 times more than the original goal set for the mission.
She transmitted over 128,000 images.
After landing in the dusty plains, she headed for the nearby Columbia Hills some 2 miles away and ultimately became the first Martian mountaineer, when she scaled Husband Hill and found evidence for the flow of liquid water at the Hillary outcrop.
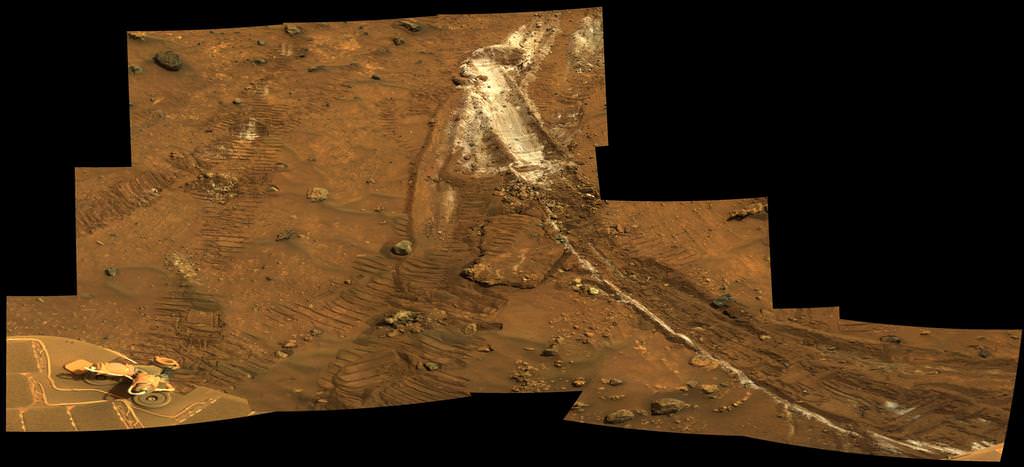
Spirit acquired this mosaic on Sol 1202 (May 21, 2007), while investigating the area east of the elevated plateau known as “Home Plate” in the “Columbia Hills.” The mosaic shows an area of disturbed soil, nicknamed “Gertrude Weise” by scientists, made by Spirit’s stuck right front wheel. The trench exposed a patch of nearly pure silica, with the composition of opal. It could have come from either a hot-spring environment or an environment called a fumarole, in which acidic, volcanic steam rises through cracks. Either way, its formation involved water, and on Earth, both of these types of settings teem with microbial life. Credit: NASA/JPL-Caltech/Cornell
The rovers were not designed to climb hills. But eventually she scaled 30 degree inclines.
The rover was equipped with a rock grinder named the Rock Abrasion Tool (RAT) built by Honeybee Robotics.
Spirit ground the surfaces off 15 rock targets and scoured 92 targets with a brush to prepare the targets for inspection with spectrometers and a microscopic imager, according to NASA.
Eventually she drove back down the hill and made even greater scientific discoveries in the area known as ‘Home Plate’.
Spirit survived three harsh Martian winters and only succumbed to the Antarctic-like temperatures when she unexpectedly became mired in an unseen sand trap driving beside an ancient volcanic feature named ‘Home Plate’ that prevented the solar arrays from generating life giving power to safeguard critical electronic and computer components.
In 2007, Spirit made one of the key discoveries of the mission at ‘Home Plate’ when her stuck right front wheel churned up a trench of bright Martian soil that exposed a patch of nearly pure silica, which was formed in a watery hot spring or volcanic environment.
Spirit was heading towards another pair of volcanic objects named ‘von Braun’ and ‘Goddard’ and came within just a few hundred feet when she died in the sand trap.
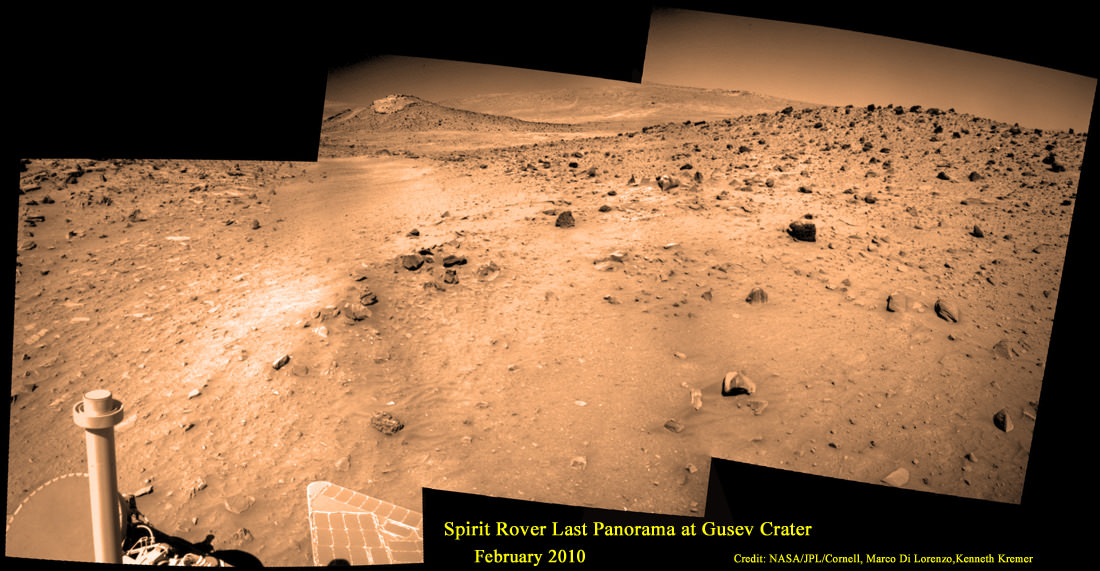
See Spirits last panorama below – created from raw images taken in Feb. 2010 by Marco Di Lorenzo and Ken Kremer.
Last View from Spirit rover on Mars
Spirit’s last panorama from Gusev Crater was taken during February 2010 before her death from extremely low temperatures during her 4th Martian winter. Spirit was just 500 feet from her next science target – dubbed Von Braun – at center, with Columbia Hills as backdrop. Mosaic Credit: Marco Di Lorenzo/ Kenneth Kremer/ NASA/JPL/Cornell University. Mosaic featured on Astronomy Picture of the Day (APOD) on 30 May 2011 – http://apod.nasa.gov/apod/ap110530.html
Here’s how the rovers’ principal investigator, Steve Squyres of Cornell University, Ithaca, N.Y., described some of the key findings in a NASA statement, starting with what Spirit found after driving from the crater floor where it landed into the Columbia hills to the east:
“In the Columbia Hills, we discovered compelling evidence of an ancient Mars that was a hot, wet, violent place, with volcanic explosions, hydrothermal activity, steam vents — nothing like Mars today.
“At Opportunity’s landing site, we found evidence of an early Mars that had acidic groundwater that sometimes reached the surface and evaporated away, leaving salts behind. It was an environment with liquid water, but very different from the environment that Spirit told us about.
“When Opportunity got to the rim of Endeavour Crater, we began a whole new mission. We found gypsum veins and a rich concentration of clay minerals. The clay minerals tell us about water chemistry that was neutral, instead of acidic — more favorable for microbial life, if any ever began on Mars.”
“Because of the rovers’ longevity, we essentially got four different landing sites for the price of two.”
Meanwhile, NASA’s new Curiosity rover just celebrated 500 Sols on Mars and is speeding towards Mount Sharp from inside Gale Crater – which is about the same size as Gusev crater.
Curiosity Celebrates 500 Sols on Mars on Jan. 1, 2014. NASA’s Curiosity rover snaps fabulous new mosaic spying towering Mount Sharp destination looming dead ahead with her high resolution color cameras, in this cropped view. See full mosaic below. Imagery assembled from Mastcam raw images taken on Dec. 26, 2013 (Sol 494). Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer- kenkremer.com
Curiosity Celebrates 500 Sols on Mars on Jan. 1, 2014
NASA’s Curiosity rover snaps fabulous new mosaic spying towering Mount Sharp destination looming dead ahead with her high resolution color cameras, in this cropped view. See full mosaic below. Imagery assembled from Mastcam raw images taken on Dec. 26, 2013 (Sol 494).
Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer- kenkremer.com
Story updated[/caption]
Today, New Year’s Day 2014, NASA’s Curiosity mega rover celebrates a huge mission milestone – her 500th Martian Day on the Red Planet since the death defying touchdown of August 2012.
“500 Sols of Mars: While Earth celebrates #NewYear2014, midnight on Mars mark my 500th day of operations,” she tweeted today.
And Curiosity marked the grand occasion by snapping a fabulous new panorama spying towering Mount Sharp – looming dead ahead in her high resolution color cameras.
You can take in the magnificent Martian view Curiosity sees today – via our newly assembled mosaic of humongous Mount Sharp rising 5.5 kilometers (3.4 mi) into the Red Planets sky; see above and below.
Ascending mysterious Mount Sharp – which dominates the Gale Crater landing site – is the ultimate reason for Curiosity’s being.
Curiosity marks 500 Sols on Mars on New Year’s Day Jan. 1, 2014. Credit: NASA/JPL
NASA’s science and engineering teams dispatched the state-of-the-art robot there because they believe the lower sedimentary layers hold the clues to the time period when Mars was habitable eons ago and they possess the required chemical ingredients necessary to sustain microbial life.
But first she needs to reach the mountains foothills.
So, just like some Earthlings, Curiosity also set a New Year’s resolution she’d like to share with you all – just tweeted all the way from the Red Planet.
“Goals for 2014: Finish driving to Mars’ Mount Sharp & do all the science I can.”
Curiosity Celebrates 500 Sols on Mars on Jan. 1, 2014. NASA’s Curiosity rover snaps fabulous new mosaic spying towering Mount Sharp destination looming dead ahead with her high resolution color cameras. Imagery assembled from Mastcam raw images taken on Dec. 26, 2013 (Sol 494). Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer- kenkremer.com
Part of those goals involve shifting the missions focus to include the search for organic molecules – the building blocks of life as we know it – which may be preserved in the sedimentary rock layers.
“Really what we’re doing is turning the corner from a mission that is dedicated to the search for habitable environments to a mission that is now dedicated to the search for that subset of habitable environments which also preserves organic carbon,” Curiosity Principal Investigator John Grotzinger, of the California Institute of Technology in Pasadena, said recently at the Dec. 2013 annual meeting of the American Geophysical Union (AGU).
The 1 ton behemoth is in the midst of an epic trek to destination Mount Sharp, roving across 10 kilometers (6 mi.) of the rather rocky crater floor of her landing site inside Gale Crater.
This illustration depicts a concept for the possible extent of an ancient lake inside Gale Crater. The existence of a lake there billions of years ago was confirmed by Curiosity from examination of mudstone in the crater’s Yellowknife Bay area. Credit: NASA/JPL-Caltech/MSSS
But the alien crater floor strewn with a plethora of sharp edged rocks is ripping significant sized holes and causing numerous dents in several of the rovers six big aluminum wheels – as outlined in my prior report; here.
Photomosaic shows new holes and tears in several of rover Curiosity’s six wheels caused by recent driving over sharp edged Martian rocks on the months long trek to Mount Sharp. Raw images taken by the MAHLI camera on Curiosity’s arm on Dec. 22, 2013 (Sol 490) were assembled to show some recent damage to several of its six wheels – most noticeably the two here in middle and front. Credit: NASA / JPL / MSSS / Marco Di Lorenzo / Ken Kremer- kenkremer.com
“Routes to future destinations for the mission may be charted to lessen the amount of travel over such rough terrain, compared to smoother ground nearby,” says NASA.
So far Curiosity’s odometer stands at 4.6 kilometers, following a post Christmas drive on Dec. 26, 2013 (Sol 494) after 16 months roving the Red Planet.
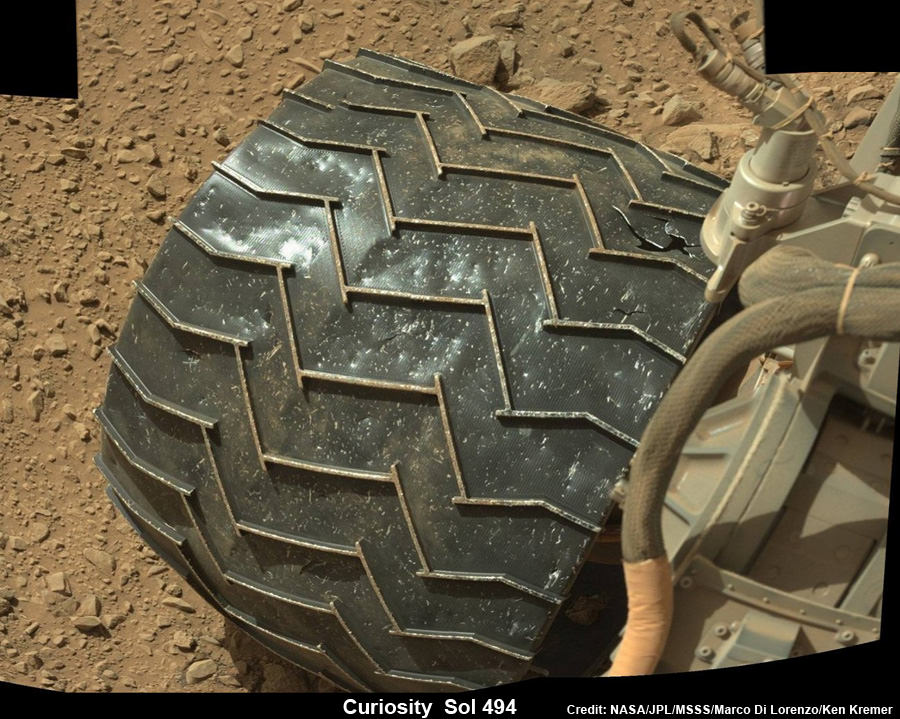
Curiosity’s handlers will be diligently watching the wear and tear on the 20 inch diameter wheels. She needs to rove along a smoother path forward to minimize wheel damage by sharp rocks.
Here’s our latest wheel mosaic from Dec. 26, 2013 (Sol 494) showing a several centimeter wide puncture in the left front wheel, which seems to have suffered the most damage.
The Mount Sharp and wheel mosaics were assembled by the imaging team of Marco Di Lorenzo and Ken Kremer.
Up close view of puncture in one of rover Curiosity’s six wheels caused by recent driving over rough Martian rocks. Mosaic assembled from Mastcam raw images taken on Dec. 26, 2013 (Sol 494) Credit: NASA/JPL/MSSS/Ken Kremer -kenkremer.com/Marco Di Lorenzo
“Taking stock this holiday season. I’m planning smoother paths for the new year,” Curiosity tweeted.
The team hopes the intrepid robot arrives at the base of Mount Sharp around the middle of this new year 2014, if all goes well.
Shortly thereafter the robot begins a new phase with the dramatic ascent up the chosen entryway which the team dubs the ‘Murray Buttes’ – fittingly named in honor of Bruce Murray, a Caltech planetary geologist, who worked on science teams of NASA’s earliest missions to Mars in the 1960s and ’70s.
The rocky road ahead towards the base of Mount Sharp and the Murray Buttes entry point is shown in this mosaic from Dec. 26, 2013 (Sol 494). Curiosity needs to rove along a smoother path forward to minimize wheel damage by sharp rocks. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer
Murray also was the director of NASA’s Jet Propulsion Laboratory from 1976 to 1982 and co-founded the Planetary Society in 1980. He passed away on Aug. 29, 2013.
“Bruce Murray contributed both scientific insight and leadership that laid the groundwork for interplanetary missions such as robotic missions to Mars, including the Mars rovers, part of America’s inspirational accomplishments. It is fitting that the rover teams have chosen his name for significant landmarks on their expeditions,” said NASA Mars Exploration Program Manager Fuk Li, of NASA’s Jet Propulsion Laboratory (JPL) , Pasadena, Calif.
Curiosity has already accomplished her primary goal of discovering a habitable zone on Mars that could support Martian microbes if they ever existed.
NASA’s rover Curiosity uncovered evidence that an ancient Martian lake had the right chemical ingredients, including clay minerals that could have sustained microbial life forms for long periods of time – and that these habitable conditions persisted on the Red Planet until a more recent epoch than previously thought.
Photomosaic shows new holes and tears in several of rover Curiosity’s six wheels caused by recent driving over sharp edged Martian rocks on the months long trek to Mount Sharp. Raw images taken by the MAHLI camera on Curiosity’s arm on Dec. 22, 2013 (Sol 490) were assembled to show some recent damage to several of its six wheels – most noticeably the two here in middle and front. Credit: NASA / JPL / MSSS / Marco Di Lorenzo / Ken Kremer- kenkremer.com
See below complete 6 wheel mosaic and further wheel mosaics for comparison
Photomosaic shows new holes and tears in several of rover Curiosity’s six wheels caused by recent driving over sharp edged Martian rocks on the months long trek to Mount Sharp. Raw images taken by the MAHLI camera on Curiosity’s arm on Dec. 22, 2013 (Sol 490) were assembled to show some recent damage to several of its six wheels – most noticeably the two here in middle and front. Credit: NASA / JPL / MSSS / Marco Di Lorenzo / Ken Kremer- kenkremer.com See below complete 6 wheel mosaic and further wheel mosaics for comparison [/caption]
Several of the NASA rovers six big aluminum wheels have suffered some significant sized rips, tears and holes up to several centimeters wide – in addition to numerous dents – as she has picked up the driving pace across the rugged, rock filled Martian terrain this past fall and put over 4.5 kilometers (3 mi.) on the odometer to date.
It’s rather easy to spot the wheel damage to the 1 ton behemoth by examining the mosaic imagery we have created – See above and below – from newly transmitted raw imagery and comparing that to older imagery taken at earlier points in the mission. Check our Sol 177 wheels mosaic below.
The latest imagery from Mars captured just prior to Christmas is delivering an undesired holiday present of sorts to team members that might well cause the scientists and engineers to alter Curiosity’s extraterrestrial road trip to traverse smoother terrain and thereby minimize future harm.
So the wheel damage is certainly manageable at this point but will require attention.
The team of Marco Di Lorenzo and Ken Kremer have assembled the new Mastcam and MAHLI raw images of the wheels captured on Sol 490 (Dec. 22) into fresh color mosaics – shown herein.
Photomosaic shows new holes and tears in several of rover Curiosity’s six wheels caused by recent driving over sharp edged Martian rocks on the months long trek to Mount Sharp. Raw images taken by the MAHLI camera on Curiosity’s arm on Dec. 22, 2013 (Sol 490) were assembled to show some recent damage to several of its six wheels – most noticeably the two at right in middle and front. Credit: NASA / JPL / MSSS / Marco Di Lorenzo / Ken Kremer- kenkremer.com
See below more wheel mosaics for comparisonPhotomosaic from Sol 177 (Feb. 3, 2013) shows rover Curiosity’s six wheels relatively intact with far fewer holes and dents compared to Sol 490 mosaic taken on Dec 22. 2013. Rover is working in Yellowknife Bay here and had not yet begun long trek to Mount Sharp. Sol 177 raw images assembled to mosaic were taken by the MAHLI camera on Curiosity’s arm. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer- kenkremer.com
Indeed the rovers handlers have already directed the SUV sized Curiosity to snap close up images of the 20 inch diameter wheels with the high resolution color cameras located on the Mast as well as the Mars Hand Lens Imager (MAHLI) camera at the end of the rover’s maneuverable robotic arm.
“We want to take a full inventory of the condition of the wheels,” said Jim Erickson of NASA’s Jet Propulsion Laboratory, project manager for the NASA Mars Science Laboratory Project, in a NASA statement.
Up close view of hole in one of rover Curiosity’s six wheels caused by recent driving over rough Martian rocks. Mosaic assembled from Mastcam raw images taken on Dec. 22, 2013 (Sol 490) Credit: NASA/JPL/MSSS/Ken Kremer -kenkremer.com/Marco Di Lorenzo
The rover team certainly expected some wear and tear to accumulate along the rock strewn path to the base of Mount Sharp – which reaches 5.5 km (3.4 mi) into the Martian sky.
But the volume of sharp edged rocks encountered in the momentous trek across the floor of Curiosity’s Gale Crater landing site apparently has picked up- as evidenced by the new pictures – and consequently caused more damage than the engineers anticipated.
“Dents and holes were anticipated, but the amount of wear appears to have accelerated in the past month or so,” Erickson noted.
“It appears to be correlated with driving over rougher terrain. The wheels can sustain significant damage without impairing the rover’s ability to drive. However, we would like to understand the impact that this terrain type has on the wheels, to help with planning future drives.”
The team is now inspecting the new imagery acquired of the wheels and will decide if a course alteration to Mount Sharp is in order.
The left front wheel may have suffered the most harm.
Up close view shows a tear in one of rover Curiosity’s six wheels caused by recent driving over rough Martian rocks. Mosaic assembled from Mastcam raw images taken on Dec. 22, 2013 (Sol 490) Credit: NASA/JPL/MSSS/Ken Kremer -kenkremer.com/Marco Di Lorenzo
“Routes to future destinations for the mission may be charted to lessen the amount of travel over such rough terrain, compared to smoother ground nearby,” says NASA.
Following a new, post Christmas drive today, Dec. 26, 2013 (Sol 494) Curiosity’s odometer stands at 4.6 kilometers.
Curiosity has already accomplished her primary goal of discovering a habitable zone on Mars that could support Martian microbes if they ever existed.
NASA’s rover Curiosity uncovered evidence that an ancient Martian lake had the right chemical ingredients that could have sustained microbial life forms for long periods of time – and that these habitable conditions persisted on the Red Planet until a more recent epoch than previously thought.
Right now the researchers are guiding Curiosity along a 10 km (6 mi) path to the lower reaches of Mount Sharp – which they hope to reach sometime in mid 2014.
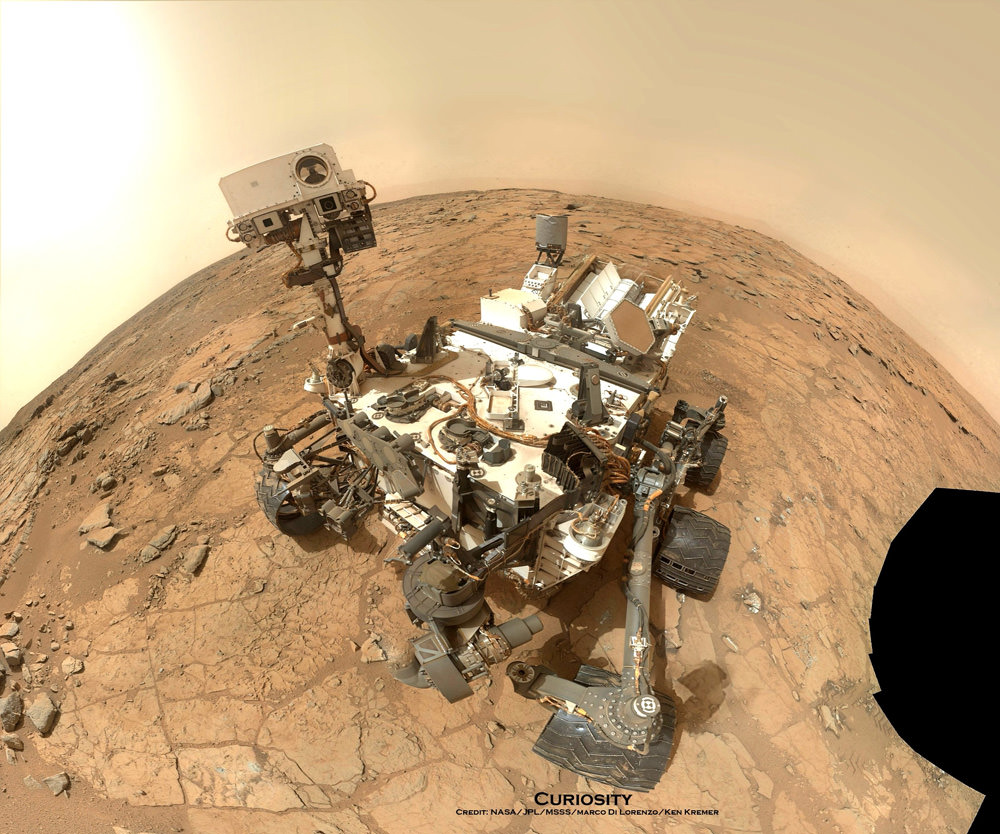
NASA’s Mars rover Curiosity took this self-portrait, composed of more than 50 images using its robotic arm-mounted MAHLI camera, on Feb. 3. The image shows Curiosity at the John Klein drill site. A drill hole is visible at bottom left. Credit: NASA / JPL / MSSS / Marco Di Lorenzo / Ken Kremer- kenkremer.com
Stay tuned here for Ken’s continuing Curiosity, Chang’e-3, LADEE, MAVEN, Mars rover and MOM news.
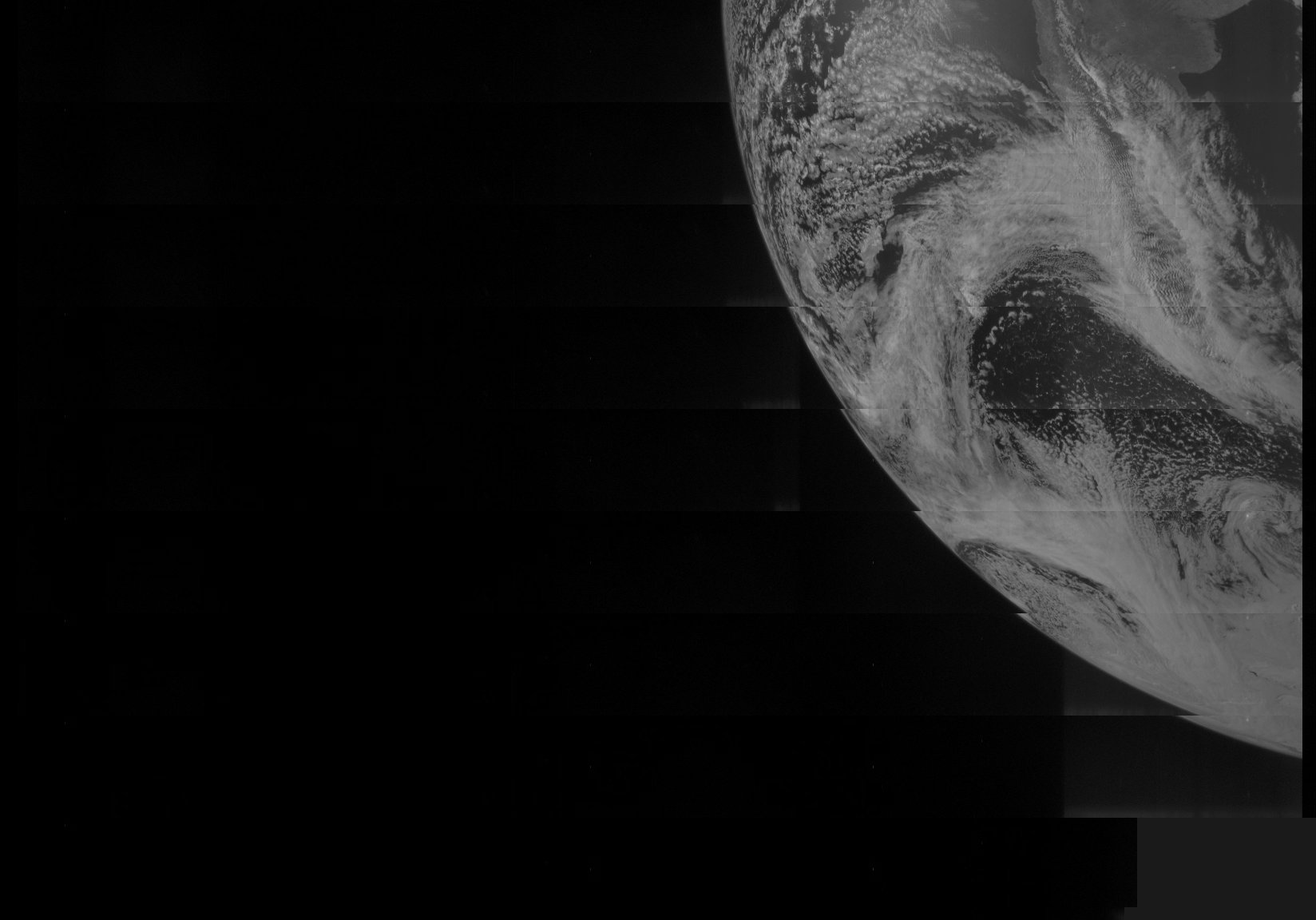
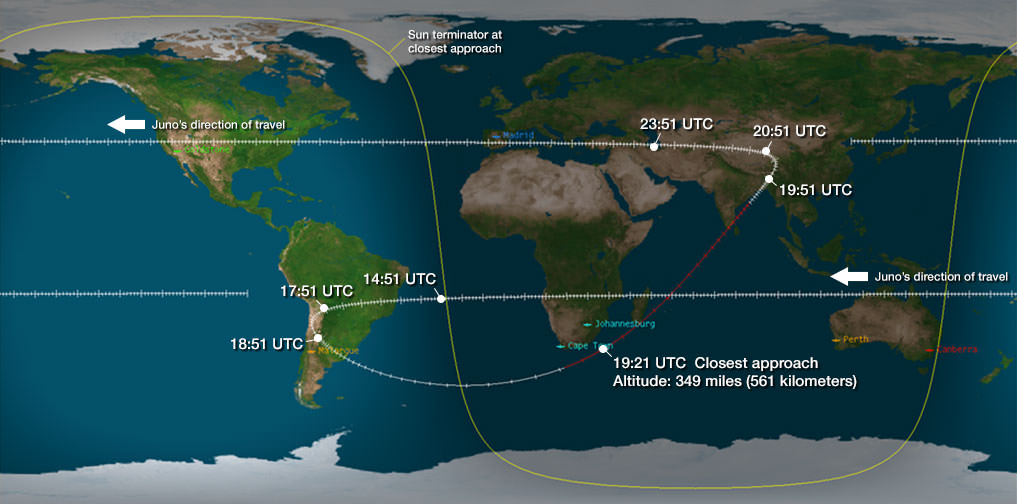
Juno swoops over Argentina This reconstructed day side image of Earth is one of the 1st snapshots transmitted back home by NASA’s Jupiter-bound Juno spacecraft during its speed boosting flyby on Oct. 9, 2013. It was taken by the probes Junocam imager and methane filter at 12:06:30 PDT and an exposure time of 3.2 milliseconds. Juno was flying over South America and the southern Atlantic Ocean. The coastline of Argentina is visible at top right. Credit: NASA/JPL/SwRI/MSSS/Ken Kremer
Following the speed boosting slingshot of Earth on Wednesday, Oct. 9, that sent NASA’s Juno orbiter hurtling towards Jupiter, the probe has successfully transmitted back data and the very first flyby images despite unexpectedly going into ‘safe mode’ during the critical maneuver.
“Juno is transmitting telemetry today,” spokesman Guy Webster, of NASA’s Jet Propulsion Lab (JPL), told me in a phone interview late today (Oct. 10), as Juno continues sailing on its 2.8 Billion kilometer (1.7 Billion mile) outbound trek to the Jovian system.
The new images of Earth captured by the Junocam imager serves as tangible proof that Juno is communicating.
“Juno is still in safe mode today (Oct. 10),” Webster told Universe Today.
“Teams at mission control at JPL and Lockheed Martin are actively working to bring Juno out of safe mode. And that could still require a few days,” Webster explained.
Lockheed Martin is the prime contractor for Juno.
The initial raw images of Earth snapped by the craft’s Junocam imager were received by ground stations late today.
See above a day light image mosaic which I reconstructed and realigned based on the original raw image (see below) taken with the camera’s methane filter on Oct. 9 at 12:06:30 PDT (3:06:30 PM EST). Juno was to be flying over South America and the southern Atlantic Ocean.
This day side raw image of Earth is one of the 1st snapshots transmitted back home today by NASA’s Juno spacecraft during its speed boosting flyby on Oct. 9, 2013. It was taken by the probes Junocam imager and methane filter at 12:06:30 PDT and an exposure time of 3.2 milliseconds. Juno was due to be flying over South America and the southern Atlantic Ocean. Credit: NASA/JPL/SwRI/MSSS
Juno performed a crucial swingby of Earth on Wednesday that accelerated the probe by 16330 MPH to enable it to arrive in orbit around Jupiter on July 4, 2016.
However the gravity assist maneuver did not go entirely as planned.
Shortly after Wednesday’s flyby, Juno Project manager Rick Nybakken, of JPL, told me in a phone interview that Juno had entered safe mode but that the probe was “power positive and we have full command ability.”
“After Juno passed the period of Earth flyby closest approach at 12:21 PM PST [3:21 PM EDT] and we established communications 25 minutes later, we were in safe mode,” Nybakken explained.
The safe mode was triggered while Juno was in an eclipse mode, the only eclipse it will experience during its entire mission.
The Earth flyby did accomplish its objective by placing the $1.1 Billion Juno spacecraft exactly on course for Jupiter as intended.
“We are on our way to Jupiter as planned!”
“None of this affected our trajectory or the gravity assist maneuver – which is what the Earth flyby is,” Nybakken stated.
Juno’s closest approach was over South Africa at about 561 kilometers (349 miles).
During the flyby, the science team also planned to observe Earth using most of Juno’s nine science instruments since the slingshot also serves as a key test of the spacecraft systems and the flight operations teams.
Juno also was to capture an unprecedented new movie of the Earth/Moon system.
Many more images were snapped and should be transmitted in coming days that eventually will show a beautiful view of the Earth and Moon from space.
“During the earth flyby we have most of our instruments on and will obtain a unique movie of the Earth Moon system on our approach, Juno principal investigator Scott Bolton told me. Bolton is from the Southwest Research Institute (SwRI), San Antonio, Texas.
“We will also calibrate instuments and measure earth’s magnetosphere, obtain closeup images of the Earth and the Moon in UV [ultraviolet] and IR [infrared],” Bolton explained to Universe Today.
Juno is approaching the Earth from deep space, from the sunlit side.
“Juno will take never-before-seen images of the Earth-moon system, giving us a chance to see what we look like from Mars or Jupiter’” says Bolton.
Here is a description of Junocam from the developer – Malin Space Science Systems
“Like previous MSSS cameras (e.g., Mars Reconnaissance Orbiter’s Mars Color Imager) Junocam is a “pushframe” imager. The detector has multiple filter strips, each with a different bandpass, bonded directly to its photoactive surface. Each strip extends the entire width of the detector, but only a fraction of its height; Junocam’s filter strips are 1600 pixels wide and about 155 rows high. The filter strips are scanned across the target by spacecraft rotation. At the nominal spin rate of 2 RPM, frames are acquired about every 400 milliseconds. Junocam has four filters: three visible (red/green/blue) and a narrowband “methane” filter centered at about 890 nm.”
Juno soars skyward to Jupiter on Aug. 5, 2011 from launch pad 41 at Cape Canaveral Air Force Station at 12:25 p.m. EDT. View from the VAB roof. Credit: Ken Kremer/kenkremer.comJuno launched atop an Atlas V rocket two years ago from Cape Canaveral Air Force Station, FL, on Aug. 5, 2011 on a journey to discover the genesis of Jupiter hidden deep inside the planet’s interior.
During a one year long science mission – entailing 33 orbits lasting 11 days each – the probe will plunge to within about 3000 miles of the turbulent cloud tops and collect unprecedented new data that will unveil the hidden inner secrets of Jupiter’s origin and evolution.


















![MER10-SpiritAndOpportunity_ByTheNumbers[1]](https://www.universetoday.com/wp-content/uploads/2014/01/MER10-SpiritAndOpportunity_ByTheNumbers1.jpg)