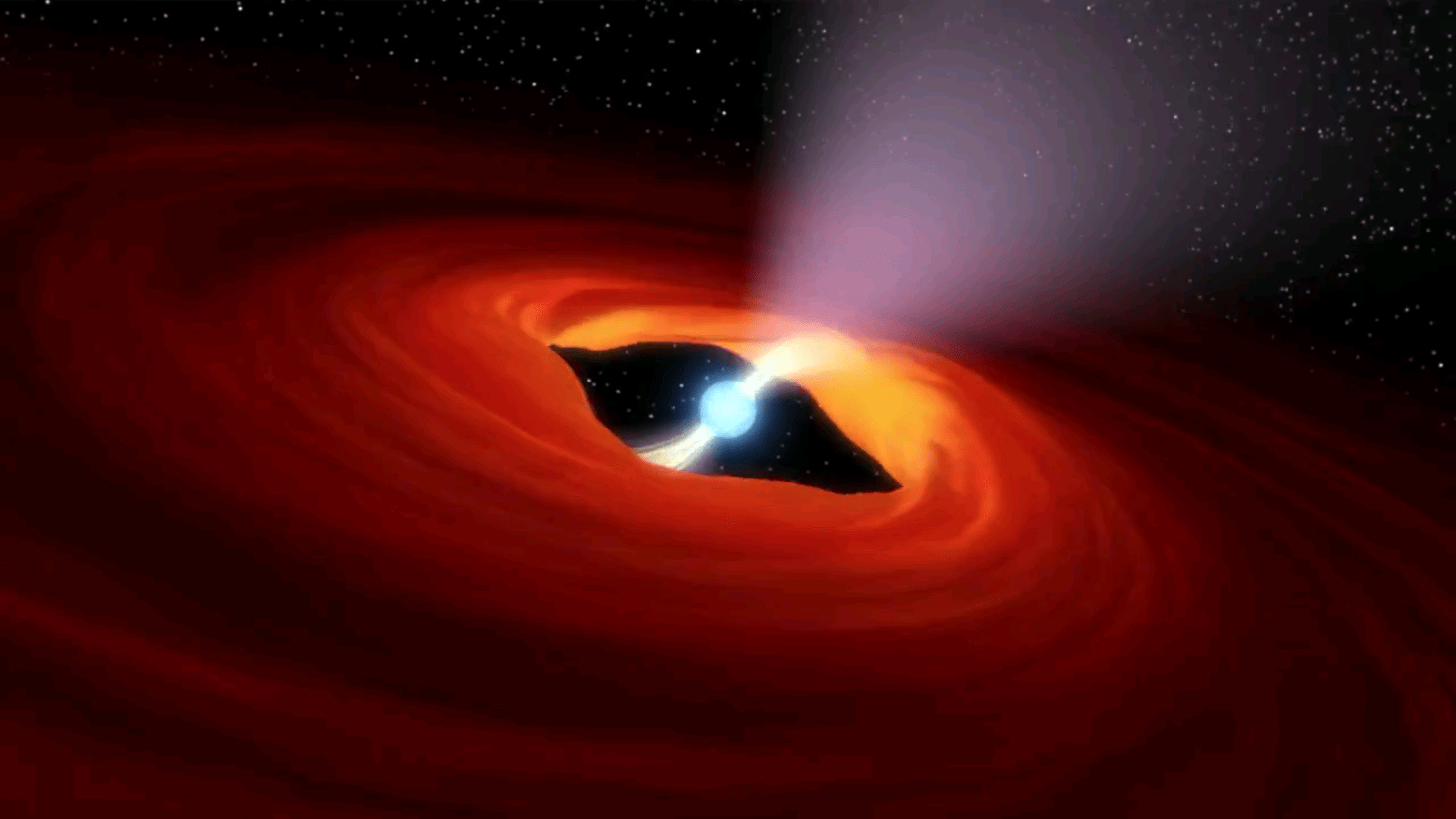
Artist's illustration of a rotating neutron star, the remnants of a super nova explosion. Credit: NASA, Caltech-JPL
A research team led by Caltech astronomers of Pasadena California have discovered an ultraluminous X-ray (ULX) source that is pulsating. Their analysis concluded that the source in a nearby galaxy – M82 – is from a rotating neutron star, a pulsar. This is the first ULX source attributed to a pulsar.
Matteo Bachetti of the Université de Toulouse in France first identified the pulsating source and is the lead author of the paper, “An ultraluminous X-ray source powered by an accreting neutron star” in the journal Nature. Caltech astronomer Dr. Fiona Harrison, the team leader, stated “This compact little stellar remnant is a real powerhouse. We’ve never seen anything quite like it. We all thought an object with that much energy had to be a black hole.”
What is most extraordinary is that this discovery places even more strain on theories already hard pressed to explain the existence of ultraluminous X-Ray sources. The burden falls on the shoulder of the theorists.
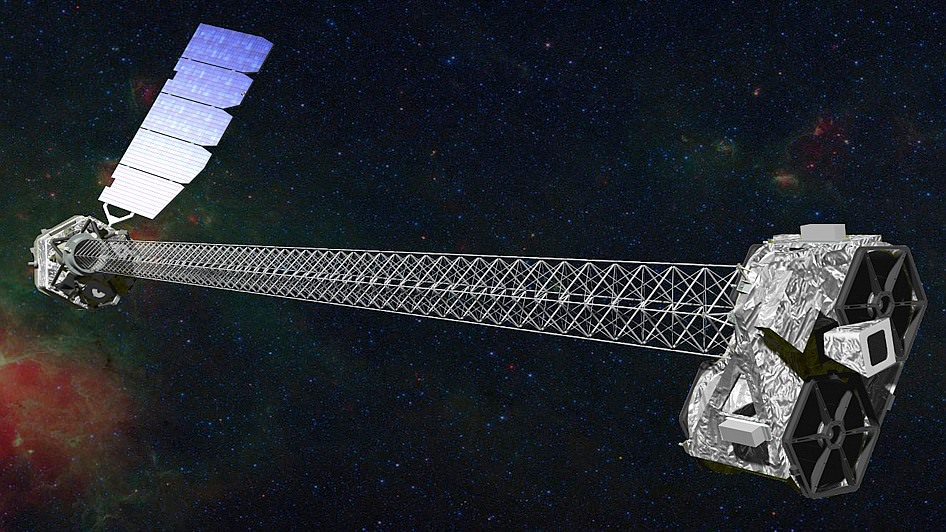
The NuStar Space Telescope launched into Earth orbit by a Orbital Science Corp. Pegasus rocket, 2012. The Wolter telescope design images throughout a spectral range from 5 to 80 KeV. (Credit: NASA/Caltech-JPL)
The source of the observations is the NuSTAR space telescope, a SMEX class NASA mission. It is a Wolter telescope that uses grazing incidence optics, not glass (refraction) or mirrors (reflection) as in visible light telescopes. The incidence angle of the X-rays must be very shallow and consequently the optics are extended out on a 10 meter (33 feet) truss. NuSTAR records its observations with a time stamp such as taking a video of the sky. The video recording in high speed is not in visible everyday light but what is called hard x-rays. Only gamma rays are more energetic. X-rays emanate from the most powerful sources and events in the Universe. NuStar observes in the energy range of X-Rays from 5 to 80 KeV (electron volt)while the famous Chandra space telescope observes in the .1 to 10 KeV range. Chandra is one NASA’s great space telescope, was launched by the Space Shuttle Columbia (STS-93) in 1999. Chandra has altered our view of the Universe as dramatically as the first telescope constructed by Galileo. NuSTAR carries on the study of X-rays to higher energies and with greater acuity.
ULX sources are rare in the Universe but this is the first pulsating ULX. After analysis, they concluded that this is not a black hole but rather its little brother, a spinning neutron star as the source. More specifically, this is an accreting binary pulsar; matter from a companion star is being gravitationally attracted by and accreting onto the pulsar.
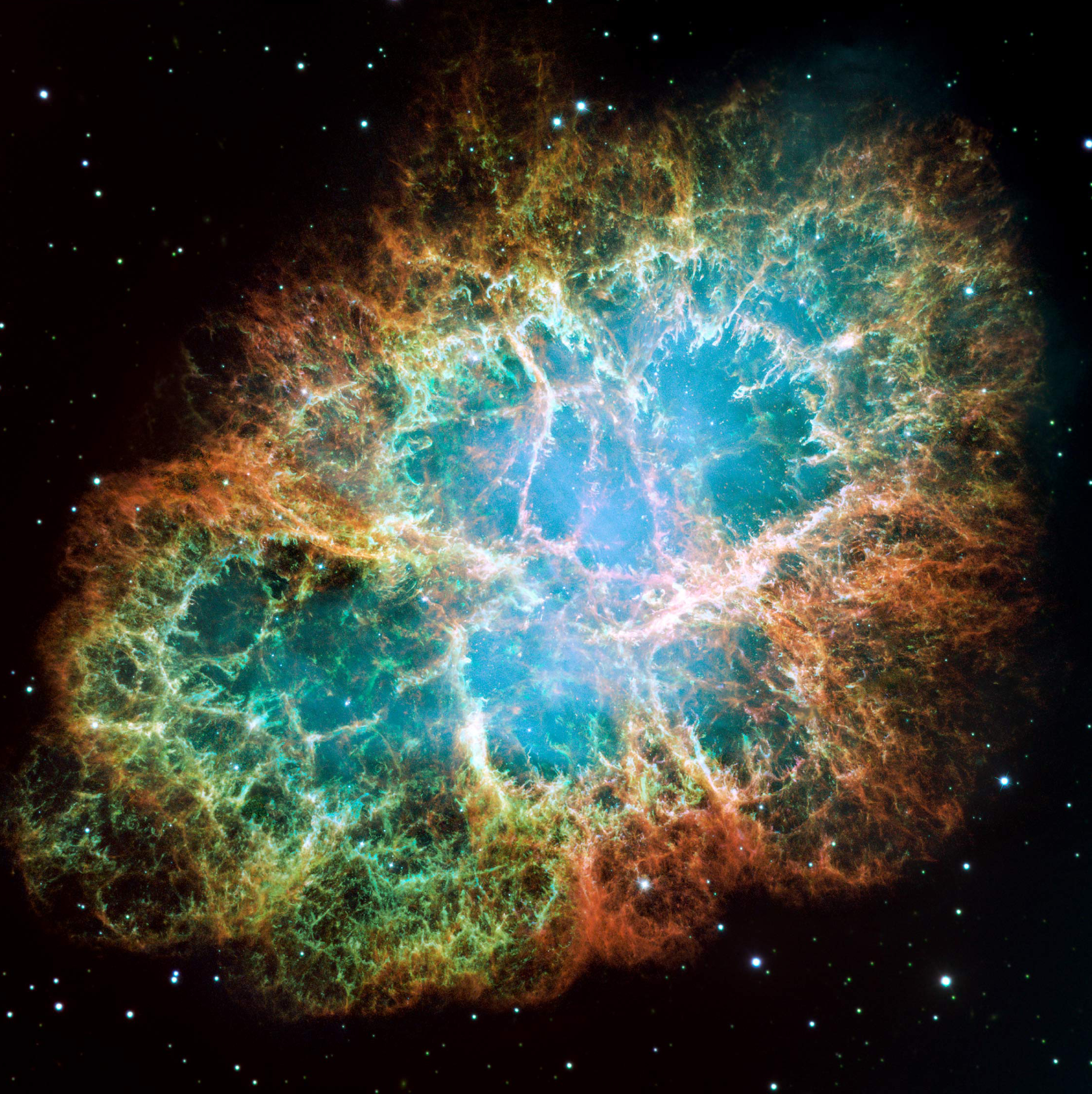
The prime example of a pulsar – the Crab Nebula Pulsar, M1. These actual observations show the expansion of shock waves emanating from the Pulsar interacting with the surrounding nebula. The Crab Pulsar actually pulsates 30 times per second, not seen here, a result of its rotation rate and the relative offset of the magnetic pole. Charndra X-Rays (left), Hubble Visible light (right). (Credit: NASA, JPL-Caltech)
Take a neutron star and spin it up to anywhere from 700 rotations per second to a mere one rotation every 10 seconds. Now you have a neutron star called a pulsar. Spinning or not, these are the remnants of supernovae, stellar explosions that can outshine a galaxy of 300 billion stars. Just one teaspoon of neutron star material weighs 10 million tons (9,071,847,400 kg). That is the same weight as 900 Great Pyramids of Giza all condensed to one teaspoon. As incredible a material and star that a neutron star is, they were not thought to be the source of any ultraluminous X-Ray sources. This view has changed with the analysis of observations by this research team utilizing NuSTAR. The telescope name – NuSTAR – stands for Nuclear Spectroscopic Telescope Array.
There is nothing run of the mill about black holes. Dr. Stephen Hawking only conceded after 25 years, in 2004 (the Thorne-Hawking Bet) that Black Holes exist. And still today it is not absolutely certain. Recall the Universe Today weekly – Space Hangout on September 26 – “Do Black Holes exist?” and the article by Jason Major, “There are no such things as Black Holes.”
Pulsars stars are nearly as exotic as black holes, and all astronomers accept the existence of these spinning neutron stars. There are three final states of a dying star. Stars like our Sun at the end of their life become very dense White Dwarf stars, about the size of the Earth. Neutron stars are the next “degenerate” state of a dying exhausted star. All the electrons have merged with the protons in the material of the star to become neutrons. A neutron star is a degenerate form of matter effectively made up of all neutron particles. Very dense, these stars are really small, the size of cities, about 16 miles in diameter. The third type of star in its final state is the Black Hole.
The Crab Nebula was first observed in the 1700s and is catalogued Messier object, M1. The remant explosion of a SuperNova that Chinese astronomers observed in 1054 A.D, it holds the second Pulsar discovered (1968).
A spinning neutron star creates a magnetic field, the most powerful of such fields in the Universe. They are like a dipole of a bar magnet and because of how magnetic fields confine the hot gases – plasma – of the neutron star, constant streams of material flow down and light streams out from the magnetic poles.
Recently, the Earth has had incredible northern lights, aurora. These lights are also from hot gases — a plasma — at the top of our atmosphere. Likewise, hot energetic particles from the Sun are funneled down into the magnetic poles of the Earth’s field that creates the northern lights. For spinning neutron stars – pulsars – the extreme light from the magnetic poles are like beacons. Just like our Earth, the magnetic poles and the spin axis poles do not coincide. So the intense beacon of light will rotate around and periodically point at the Earth. The video of the first illustration describes this action.
Messier object – M82, the Cigar Nebula, nicknamed for the shape seen through telescopes of the 1800s. This is the location of the newly discovered Pulsar.
The light beacons from pulsars are very bright but theory, until now, has been supported by observations. No ultraluminous X-ray sources should be pulsars. The newly discovered pulsar is outputting 100 times more energy than any other. Discoveries like the one by these astronomers utilizing NuSTAR is proof that there remains more to discover and understand and new telescopes will be conceived to help resolve questions raised by NuSTAR or Chandra.
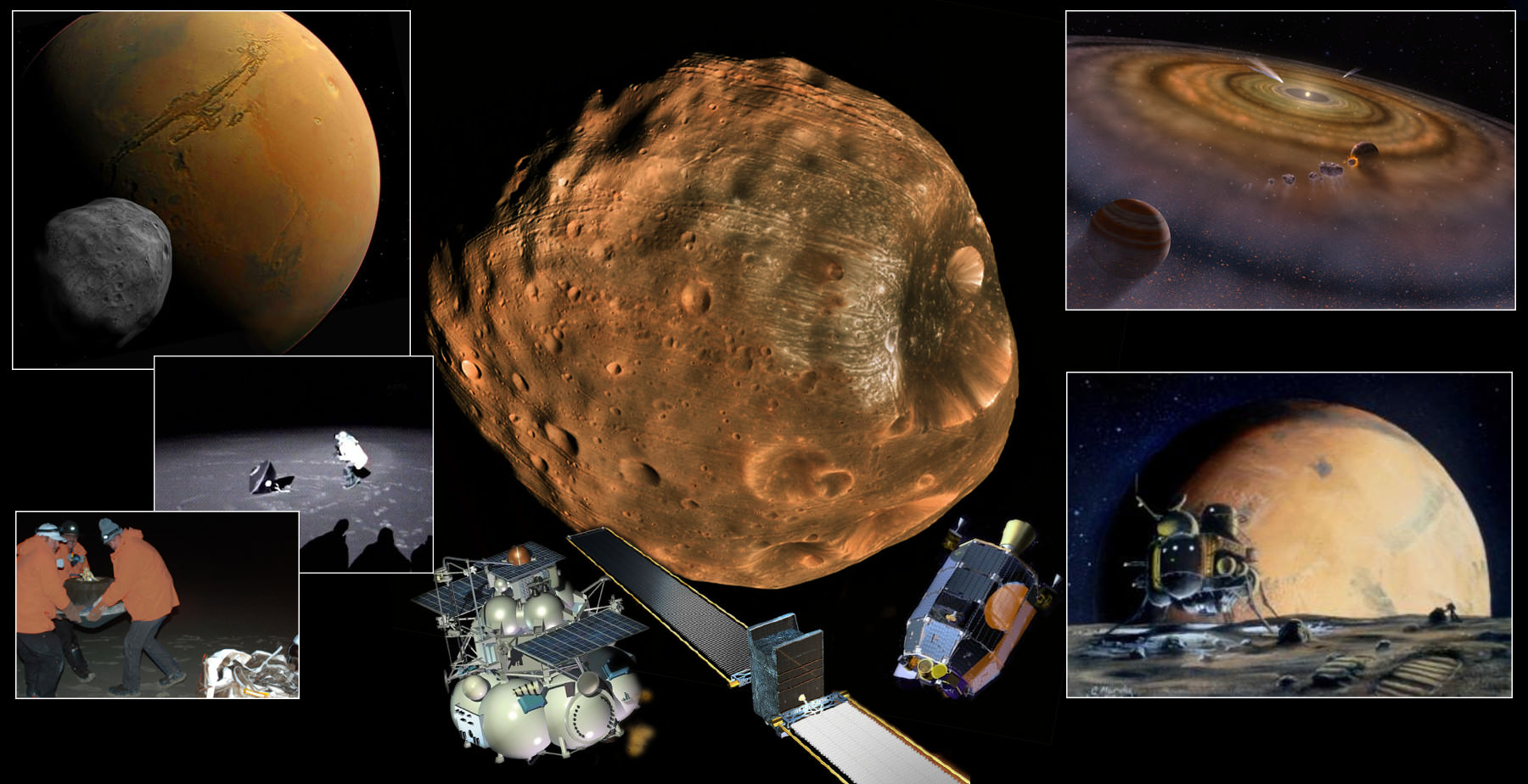
Phobos. From where did it arise or arrive? Is it dry or wet? Should we flyby or sample and return? Should it be Boots or Bots? (Photos: NASA, Illus.:T.Reyes)
Ask any space enthusiast, and almost anyone will say humankind’s ultimate destination is Mars. But NASA is currently gearing up to go to an asteroid. While the space agency says its Asteroid Initiative will help in the eventual goal of putting people on Mars, what if instead of going to an asteroid, we went to Mars’ moon Phobos?
Three prominent planetary scientists have joined forces in a new paper in the journal Planetary and Space Science to explain the case for a mission to the moons of Mars, particularly Phobos.
“Phobos occupies a unique position physically, scientifically, and programmatically on the road to exploration of the solar system,” say the scientists. In addition, the moons may possibly be a source of in situ resources that could support future human exploration in circum-Mars space or on the Martian surface. But a sample return mission first could provide details on the moons’ origins and makeup.
The Martian moons are riddles, wrapped in a mystery, inside an enigma.Phobos and its sibling Deimos seem like just two asteroids which were captured by the planet Mars, and they remain the last objects of the inner solar system not yet studied with a dedicated mission. But should the moons be explored with flybys or sample-return? Should we consider “boots or bots”?
The publications and mission concepts for Phobos and Deimos are numerous and go back decades. The authors of “The Value of a Phobos Sample Return,” Murchie, Britt, and Pieters, explore the full breadth of questions of why and how to explore Phobos and Deimos.
Dr. Murchie is the principal investigator of the Mars Reconnaissance Orbiter’s CRISM instrument, a visible/infrared imaging spectrometer. He is a planetary scientist from John Hopkins’ Applied Physics Lab (APL) which has been at the forefront of efforts to develop a Phobos mission. Likewise, authors Dr. Britt, from the University of Central Florida, and Dr. Pieters, from Brown University, have partnered with APL and JPL in Phobos/Deimos mission proposals.
An MRO HiRise image of the Martian moon Phobos. Taken on March 23, 2008. Phobos has dimensions of 27 × 22 × 18 km, while Deimos is 15 × 12.2 × 11 km. Both were discovered in 1877 at the US Naval Observatory in Washington, D.C. (Photo: NASA/MRO/HiRISE)
APL scientists are not the only ones interested in Phobos or Deimos. The Jet Propulsion Laboratory, Ames Research Center and the SETI Institute have also proposed several missions to the small moons. Every NASA center has been involved at some level.
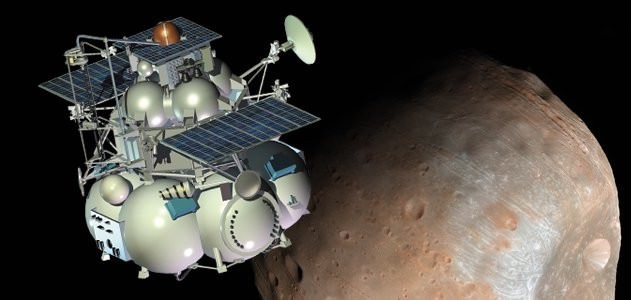
But the only mission to actually get off the ground is the Russian Space Agency’s Phobos-GRUNT[ref]. The Russian mission was launched November 9, 2011, and two months later took a bath in the Pacific Ocean. The propulsion system failed to execute the burns necessary to escape the Earth’s gravity and instead, its orbit decayed despite weeks of attempts to activate the spacecraft. But that’s a whole other story.
The Russian-led mission Phobos-Grunt did not end well; under Pacific swells to be exact. Undaunted Russian scientists are pressing for Phobos-Grunt 2 (illus.), an improved lander with sample-return. Proposed for 2020s (Credit: CNES)
“The Value of a Phobos Sample Return” first discusses the origins of the moons of Mars. There is no certainty. There is a strong consensus that Earth’s Moon was born from the collision of a Mars-sized object with Earth not long after Earth’s formation. This is just one possibility for the Martian moons. Murchie explains that the impacts that created the large basins and craters on Mars could have spawned Phobos and Deimos: ejecta that achieved orbit, formed a ring and then coalesced into the small bodies. Alternative theories claim that the moons were captured by Mars from either the inner or outer solar system. Or they could have co-accreted with Mars from the Solar Nebula. Murchie and the co-authors describe the difficulties and implications of each scenario. For example, if captured by Mars, then it is difficult to explain how their orbits came to be “near-circular and near-equatorial with synchronous rotational periods.”
To answer the question of origins, the paper turns to the questions of their nature. Murchie explains that the limited compositional knowledge leaves several possibilities for their origins. They seem like D-type asteroids of the outer asteroid belt. However, the moons of Mars are very dry, void of water, at least on their surfaces as the paper discusses in detail. The flybys of Phobos and Deimos by NASA and ESA spacecraft are simply insufficient for drawing any clear picture of their composition or structure, let alone their origins, Murchie and co-authors explain.
If the moons were captured then they have compositions different from Mars; however if they accreted with or from Mars, then they share similar compositions with the early Mars when forming, or from Martian crustal material, respectively.
The paper describes in some detail the problem that billions of years of Martian dust accumulation presents. Every time Mars has been hit by a large asteroid, a cloud of debris is launched into space. Some falls back to the planet but much ends up in orbit. Each time, some of the debris collided with Phobos and Deimos; Murchie uses the term “Witness plate” to describe what the two moons are to Mars. There is an accumulation of Martian material and also material from the impactors covering the surfaces of the moons. Flyby images of Phobos show a reddish surface similar to Mars, and numerous tracks along the surface as if passing objects struck, plowed or rolled along. However, the reddish hue could be weathering from Solar flux over billions of years.
The paper continues with questions of the composition and how rendezvous missions could go further to understanding the moons makeup and origins, however, it is sample return that would deliver, the pay dirt. Despite how well NASA and ESA engineers have worked to shrink and lighten the instruments that fly, orbit, and land on Mars, returning a sample of Phobos to labs on Earth would permit far more detailed analysis.
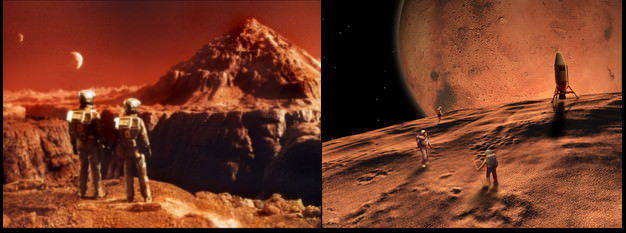
SpaceX and Elon Musk claim that they will mount human flight to Mars before 2030. Many others remain less optimistic with hopes of human flights before 2040. (Illustrations: Total Recall, 1990, early artist illustration c.1950s )
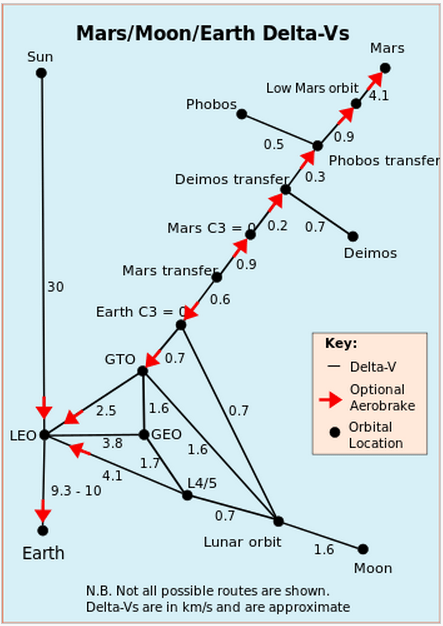
Science Fiction writers and mission designers have imagined Phobos, in particular, as a starting point for the human exploration and colonization of Mars. A notable contemporary work is “Red Mars” by Kim Stanley Robinson; however, the story line is dated due to the retirement of the Space Shuttle and the external tanks Robinson clustered to form the colonization vessel. While this paper by Murchie et al. is purely scientific, fiction writers have used the understanding that Phobos is far easier to reach from Earth than is the surface of Mars (see Delta-V chart below).
A diagram showing the stair-step energy needed to travel to places beyond the Earth. Delta-V is the speed in km/sec required to reach a destination. As shown, the Delta-Vs are cumulative. Note that it takes an extra 5 km/sec beyond Phobos to reach the Martian surface; a prime reason for making the journey to the moons of Mars. (Credit: Wikipedia, Delta-V)
Phobos, orbiting at 9,400 kilometers (5,840 miles), and Deimos, at 23,500 km (14,600 miles), above Mars avoids the need for the 7-odd minutes of EDL terror – Entry, Descent, and Landing — and pulling oneself out of the Martian gravity well to return to Earth. Furthermore, there is the interest in using Phobos as a material resource – water, material for rocket fuel or building materials. “The Value of a Phobos Sample Return” discusses the potential of Phobos as a resource for space travelers – “In Situ Resource Utilization” (ISRU), in the context of its composition, how the solar flux may have purged the moons of water or how Martian impact debris covers materials of greater interest and value to explorers.
With so many questions and interests, what missions have been proposed and explored? The Murchie paper describes a half dozen missions but there are several others that have been conceived and proposed to some level over several decades.
At present, there is at least one mission actively pursuing funds. The SETI and Ames proposed “Phobos and Deimos & Mars Environment” (PADME) mission led by Dr. Pascal Lee is competing for Discovery program funding. Such projects must limit cost to $425 million or less and be capable of launching in less than 3 years. They are proposing a launch date of 2018 on a SpaceX Falcon 9. The PADME mission design would reuse Ames LADEE hardware and expertise, however, it does not go so far as what Murchie and co-authors argue – returning a sample from Phobos. PADME would maintain in a synchronized orbit with Phobos and then Deimos foe repeated flybys. The mission is likely to cost in the range of $300 million. Stardust, a relevant mission due to its sample return capsule, launched in 1999 and had costs which likely reached a similar level by end of mission in 2012.
The Russian Space Agency is attempting to gain funding for Phobos-Grunt 2 but possible launch dates continue to be moved back – 2020, 2022, and now possibly 2024.
Return of the Stardust sample inside the Lockheed-Martin developed sample-return capsule. Seen here upon successful landing in the Utah desert. (Credit: NASA/Stardust)
Additionally, each of this papers’ authors has mission proposals described. Dr. Pieters, JPL, and Lockheed-Martin proposed the Aladdin mission; Dr. Britt at APL, also with Lockheed-Martin, proposed the mission Gulliver; both would re-use the Stardust sample-return capsule (photo, above). Dr. Murchie also describes his APL/JPL mission concept called MERLIN (Mars–Moon Exploration, Reconnaissance and Landed Investigation).
Phobos and Deimos are the last two of what one would call major objects of the inner Solar System that have not had dedicated missions of exploration. Several bodies of the Asteroid Belt have been targeted with flybys and Dawn is nearing its second target, the largest of the Asteroids, Ceres.
So sooner rather than later, a spacecraft from some nation (not necessarily the United States) will target the moons of Mars. Targeted Phobos/Deimos missions are also likely to include both flyby missions and one or more sample-return missions. A US-led mission with sample-return in the Discovery program will be strained to meet both criteria – $425 million cost cap and 3 year development period.
Those utilizing the Lockheed-Martin (LM) Stardust design have a proven return capsule and spacecraft buses (structure, mechanisms and avionics) for re-use for cost and time savings. This includes five generations of the LM flight software that holds an incredible legacy of mission successes starting with Mars Odyssey/Genesis/Spitzer to now Maven.
All three proposals by this paper’s authors could be re-vamped and proposed again and compete against each other. All three could use Lockheed-Martin past designs. Cooperation in writing this paper may be an indicator that they will join forces, combine concepts, and share investigator positions on a single NASA-led project. The struggle for federal dollars remains a tough, tight battle and with the human spaceflight program struggling to gain a new footing after Space Shuttle, dollars for inter-planetary missions are likely to remain very competitive. However, it appears a Phobos-Deimos mission is likely within the next ten years.
The Mars Orbiter Mission (MOM) is India’s first mission to the Red Planet. The historic arrival on Sept. 23/24 will be webcast live by ISRO. Details below. Credit: ISRO
Its D-Day for MOM! The Mars Orbiter Mission (MOM) is India’s history making first mission to the Red Planet and she arrives today, Sept. 23/24 !
MOM’s goal is to study Mars’ surface features, morphology, mineralogy, and the Martian atmosphere with five indigenous scientific instruments. Among other goals it will sniff for methane.
Depending on your time zone, today’s historic arrival falls on either Sept. 23 (EST) or Sept. 24 (IST).
MOM’s entire future depends on conducting a successful and precise, do-or-die Mars Orbital Insertion (MOI) braking burn just hours from now.
The MOI engine firing is targeted for Sept. 23 at 9:47:32 p.m. EDT and Sept. 24 at 07:17:32 hrs IST.
And you can watch all the action live as it happens via a live webcast from the Indian Space Research Organization (ISRO) website, India’s space agency which designed and developed MOM for about $69 Million.
ISRO’s live streaming webcast starts on the US East Coast today, Sept. 23, at 9:15 p.m. EDT and in India on Sept. 24 at 6:45 IST: http://www.isro.org/
Here’s another webcast link for MOM’s Mars Orbit Insertion (MOI) from ISTRAC, Bangalore: http://webcast.isro.gov.in/
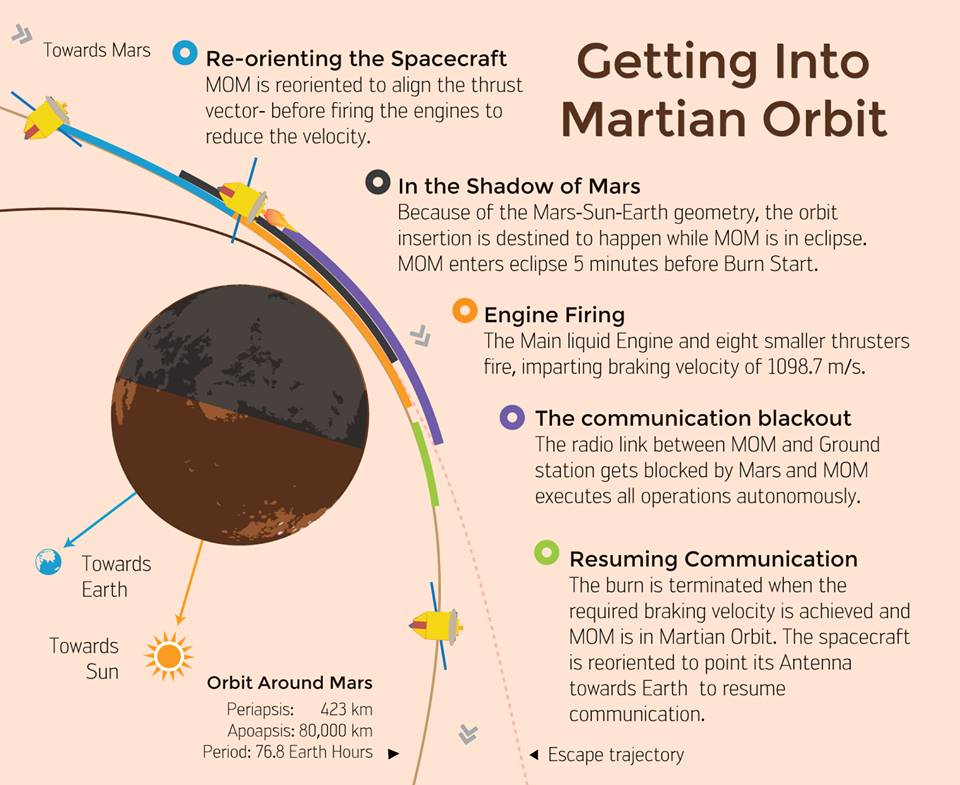
The MOI burn involves firing the probes 440 Newton Liquid Apogee Motor (LAM) and eight smaller 22 Newton liquid fueled engines for a duration of about 24 minutes to enter Mars’ orbit.
Confirmation of a successful start to the engine burn could be received back on Earth at about 10 p.m. EDT or 7:30 IST. Confirmation of a successful MOI conclusion could be received by about 10:30 p.m. EDT or 8:00 IST
On Monday, Sept 22, engineers at the Bangalore mission control center verified the performance and readiness of the LAM by conducting the final Trajectory Correction Maneuver (TCM-4) with a engine burst duration of 3.968 seconds.
“We had a perfect burn for four seconds as programmed. MOM will now go-ahead with the nominal plan for Mars Orbital Insertion,” said ISRO.
The Indian engineering team has only one chance to get it right, and the entire world is pulling for India. NASA, JPL, and the DSN have sent along extra special good luck wishes in the form of group photos below.
Good luck wishes for MOM from NASA and JPL. Credit: NASA/ISRO
Everyone is wishing for complete success for the probe which reaches Mars just two days after NASA’s MAVEN orbiter successfully achieved orbit on Sunday night, Sept. 21.
“We wish a successful MOI for MOM,” said Bruce Jakosky, MAVEN principal investigator with the Laboratory for Atmospheric and Space Physics at the University of Colorado, Boulder (CU/LASP) at MAVEN’s post MOI briefing on Monday, Sept. 22.
ISRO reports today that all systems are currently “GO.”
Watch this cool animation showing the interplanetary path of MOM and MAVEN from Earth to Mars sent to me be an appreciative reader – Sankaranarayanan K V:
If all goes well, MOM will join Earth’s newly fortified armada of six spacecraft operating on Mars surface or in orbit – MAVEN, Mars Odyssey (MO), Mars Reconnaissance Orbiter (MRO), Mars Express (MEX), Curiosity, and Opportunity.
Today, MOM concludes her 10 month interplanetary voyage of some 442 million miles (712 million km) from Earth to the Red Planet.
Good luck MOM!
ISRO’s Mars Orbiter Mission – The plan of action for Mars Orbit Insertion on September 24. Credit ISRO
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
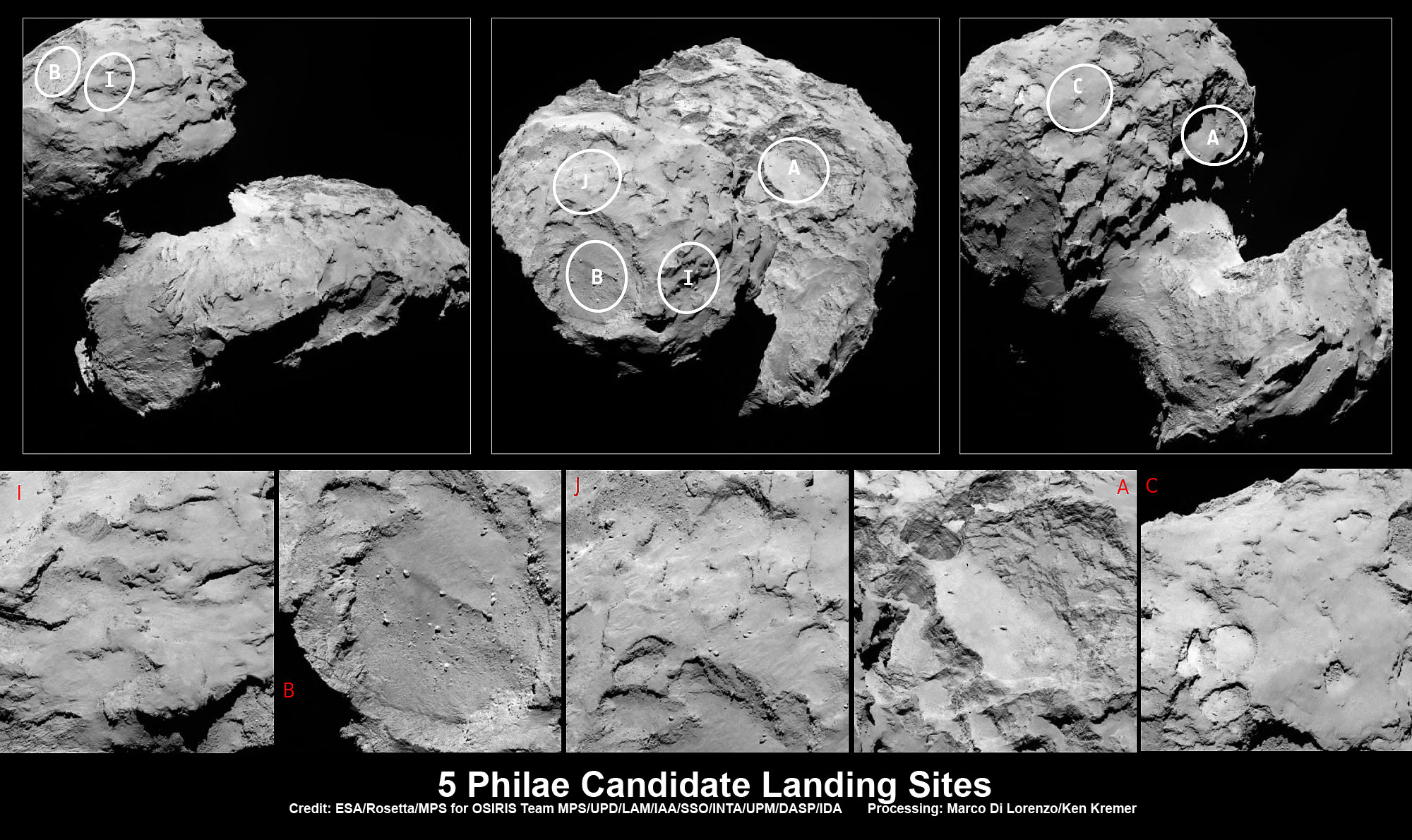
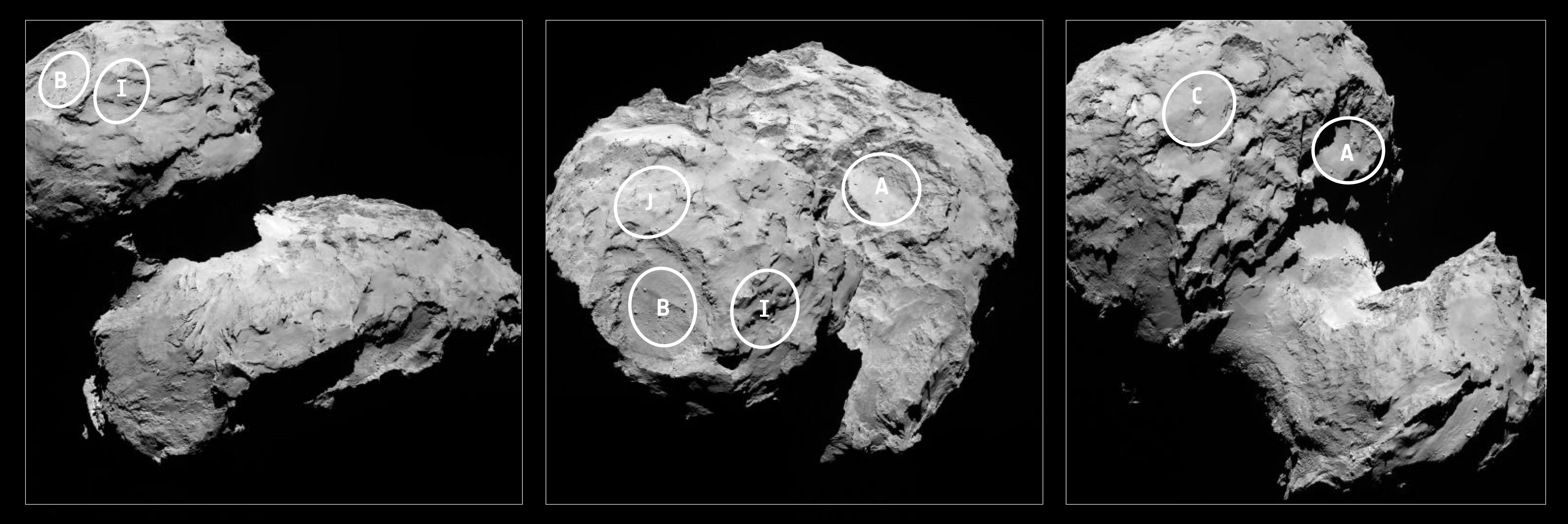
Five candidate sites were identified on Comet 67P/Churyumov-Gerasimenko for Rosetta’s Philae lander. The approximate locations of the five regions are marked on these OSIRIS narrow-angle camera images taken on 16 August 2014 from a distance of about 100 km. Enlarged insets below highlight 5 landing zones. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Processing: Marco Di Lorenzo/Ken Kremer
Five candidate sites were identified on Comet 67P/Churyumov-Gerasimenko for Rosetta’s Philae lander. The approximate locations of the five regions are marked on these OSIRIS narrow-angle camera images taken on 16 August 2014 from a distance of about 100 km. Enlarged insets below highlight 5 landing zones. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Processing: Marco Di Lorenzo/Ken Kremer
Story updated[/caption]
The ‘Top 5’ landing site candidates have been chosen for the Rosetta orbiters piggybacked Philae lander for humankind’s first attempt to land on a comet. See graphics above and below.
The potential touchdown sites were announce today, Aug. 25, based on high resolution measurements collected by ESA’s Rosetta spacecraft over the past two weeks since arriving at the bizarre and pockmarked Comet 67P/Churyumov-Gerasimenko on Aug. 6, 2014.
Rosetta is a mission of many firsts, including history’s first ever attempt to orbit a comet for long term study.
Philae’s history making landing on comet 67P is currently scheduled for around Nov. 11, 2014, and will be entirely automatic. The 100 kg lander is equipped with 10 science instruments.
“This is the first time landing sites on a comet have been considered,” said Stephan Ulamec, Lander Manager at DLR (German Aerospace Center), in an ESA statement.
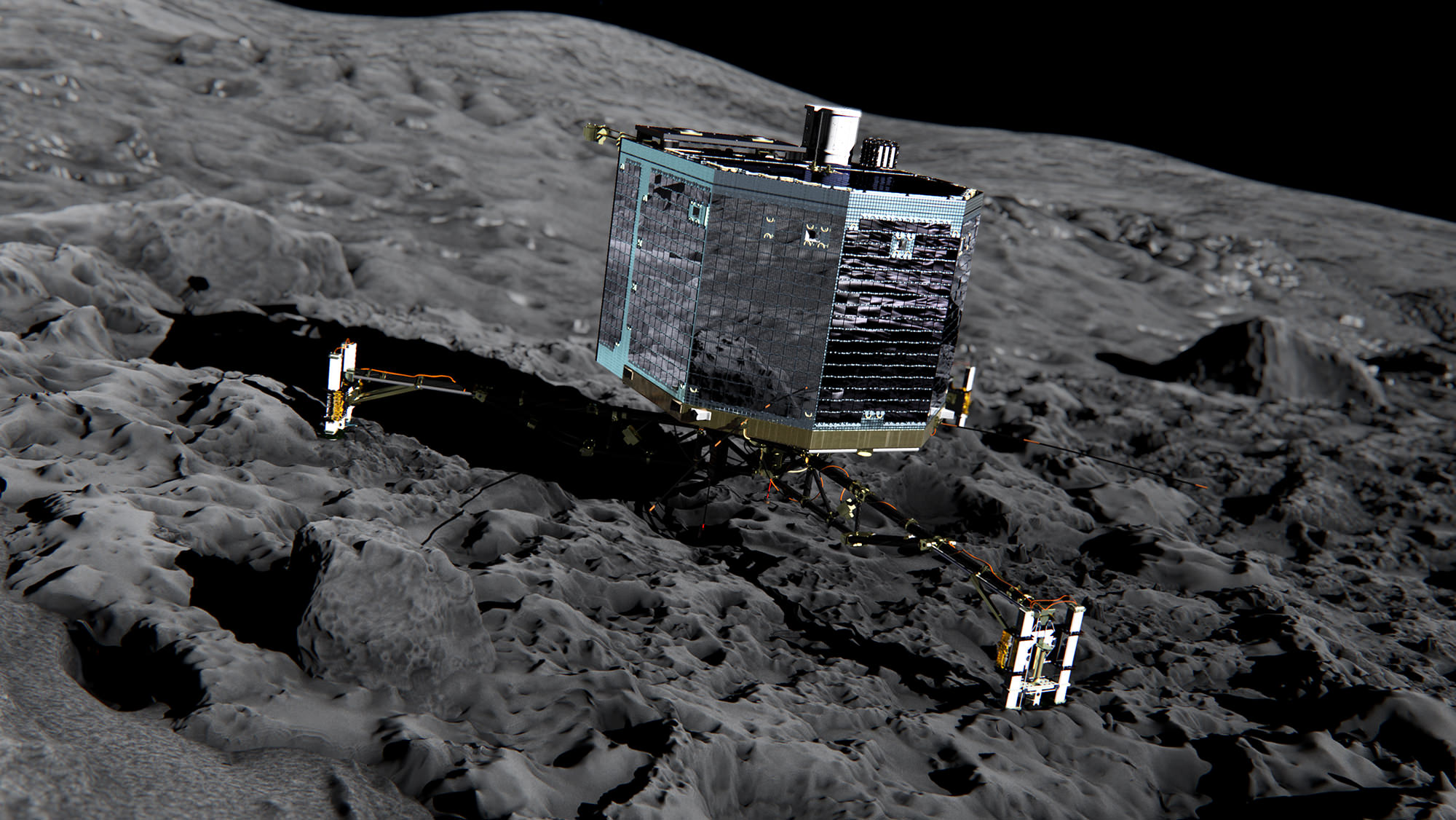
Artist impression of Philae on the surface of comet 67P/Churyumov-Gerasimenko. Credit: ESA/ATG medialab
Since rendezvousing with the comet after a decade long chase of over 6.4 billion kilometers (4 Billion miles), a top priority task for the science and engineering team leading Rosetta has been “Finding a landing strip” for the Philae comet lander.
“The challenge ahead is to map the surface and find a landing strip,” said Andrea Accomazzo, ESA Rosetta Spacecraft Operations Manager, at the Aug. 6 ESA arrival live webcast.
So ‘the clock is ticking’ to select a suitable landing zone soon as the comet warms up and the surface becomes ever more active as it swings in closer to the sun and makes the landing ever more hazardous.
This past weekend, the site selection team met at CNES, Toulouse, France, and intensively discussed and scrutinized a preliminary list of 10 potential sites, and whittled that down to the ‘Top 5.’
Their goal was to find a ‘technically feasible’ touchdown site that was both safe and scientifically interesting.
“The site must balance the technical needs of the orbiter and lander during all phases of the separation, descent, and landing, and during operations on the surface with the scientific requirements of the 10 instruments on board Philae,” said ESA.
They also had to be within an ellipse of at least 1 square kilometer (six-tenths of a square mile) in diameter due to uncertainties in navigation as well as many other factors.
“For each possible zone, important questions must be asked: Will the lander be able to maintain regular communications with Rosetta? How common are surface hazards such as large boulders, deep crevasses or steep slopes? Is there sufficient illumination for scientific operations and enough sunlight to recharge the lander’s batteries beyond its initial 64-hour lifetime, while not so much as to cause overheating?” according to ESA.
Stephan Ulamec, Philae Lander Manager at DLR (German Aerospace Center) discusses landing during ESA webcast of Rosetta’s arrival at comet Comet 67P/Churyumov-Gerasimenko. Credit: ESA
The Landing Site Selection Group (LSSG) team was comprised of engineers and scientists from Philae’s Science, Operations and Navigation Centre (SONC) at CNES, the Lander Control Centre (LCC) at DLR, scientists representing the Philae Lander instruments as well as the ESA Rosetta team, which includes representatives from science, operations and flight dynamics.
“Based on the particular shape and the global topography of Comet 67P/ Churyumov-Gerasimenko, it is probably no surprise that many locations had to be ruled out,” said Ulamec.
“The candidate sites that we want to follow up for further analysis are thought to be technically feasible on the basis of a preliminary analysis of flight dynamics and other key issues – for example they all provide at least six hours of daylight per comet rotation and offer some flat terrain. Of course, every site has the potential for unique scientific discoveries.”
When Rosetta arrived on Aug. 6, it was initially orbiting at a distance of about 100 km (62 miles) in front of the comet. Carefully timed thruster firings then brought it to within about 80 km distance. And it is moving far closer – to within 50 kilometers (31 miles) and even closer!
Upon arrival the comet was 522 million km from the Sun. As Rosetta escorts the comet looping around the sun, they move much closer. By landing time in mid-November they are only about 450 million km (280 million mi) from the sun.
At closest approach on 13 August 2015 the comet and Rosetta will be 185 million km from the Sun. That corresponds to an eightfold increase in the light received from the Sun.
Five candidate sites were identified on Comet 67P/Churyumov-Gerasimenko for Rosetta’s Philae lander. The approximate locations of the five regions are marked on these OSIRIS narrow-angle camera images taken on 16 August 2014 from a distance of about 100 km. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
Therefore Rosetta and Philae will simultaneously study the warming effects of the sun as the comet outgases dust, water and much more.
The short period Comet 67P/Churyumov-Gerasimenko has an orbital period of 6.5 years.
“The comet is very different to anything we’ve seen before, and exhibits spectacular features still to be understood,” says Jean-Pierre Bibring, a lead lander scientist and principal investigator of the CIVA instrument.
“The five chosen sites offer us the best chance to land and study the composition, internal structure and activity of the comet with the ten lander experiments.”
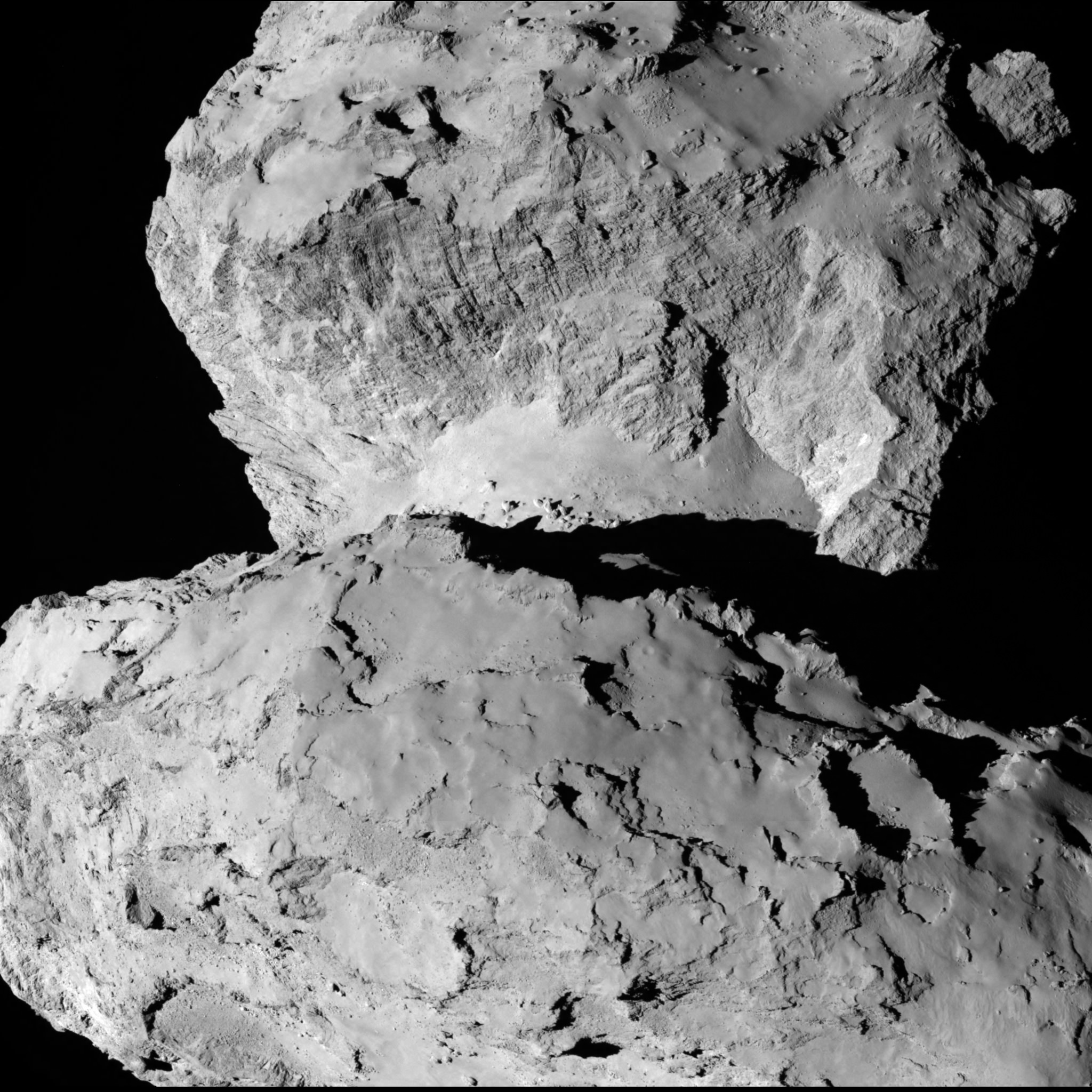
A close-up view of Comet 67P/Churyumov–Gerasimenko taken by the Rosetta spacecraft on Aug. 7, 2014. Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
The ‘Top 5’ zones will be ranked by 14 September. Three are on the ‘head’ and two are on the ‘body’ of the bizarre two lobed alien world.
And a backup landing site will also be chosen for planning purposes and to develop landing sequences.
The ultimate selection of the primary landing site is slated for 14 October after consultation between ESA and the lander team on a “Go/No Go” decision.
The three-legged lander will fire two harpoons and use ice screws to anchor itself to the 4 kilometer (2.5 mile) wide comet’s surface. Philae will collect stereo and panoramic images and also drill 23 centimeters into and sample its incredibly varied surface.
Why study comets?
Comets are leftover remnants from the formation of the solar system. Scientists believe they delivered a vast quantity of water to Earth. They may have also seeded Earth with organic molecules – the building blocks of life as we know it.
Any finding of organic molecules will be a major discovery for Rosetta and ESA and inform us about the origin of life on Earth.
Read an Italian language version of this story by my imaging partner Marco Di Lorenzo – here
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
Holger Sierks, OSIRIS principal investigator, discusses spectacular hi res comet images returned so far by Rosetta during the Aug. 6 ESA webcast from mission control at ESOC, Darmstadt, Germany. Credit: Roland KellerESA’s Rosetta Spacecraft nears final approach to Comet 67P/Churyumov-Gerasimenko in late July 2014. This collage of imagery from Rosetta combines Navcam camera images at right taken nearing final approach from July 25 (3000 km distant) to July 31, 2014 (1327 km distant), with OSIRIS wide angle camera image at left of comet’s expanding coma cloud on July 25. Images to scale and contrast enhanced to show further detail. Credit: ESA/Rosetta/NAVCAM/OSIRIS/MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Collage/Processing: Marco Di Lorenzo/Ken Kremer
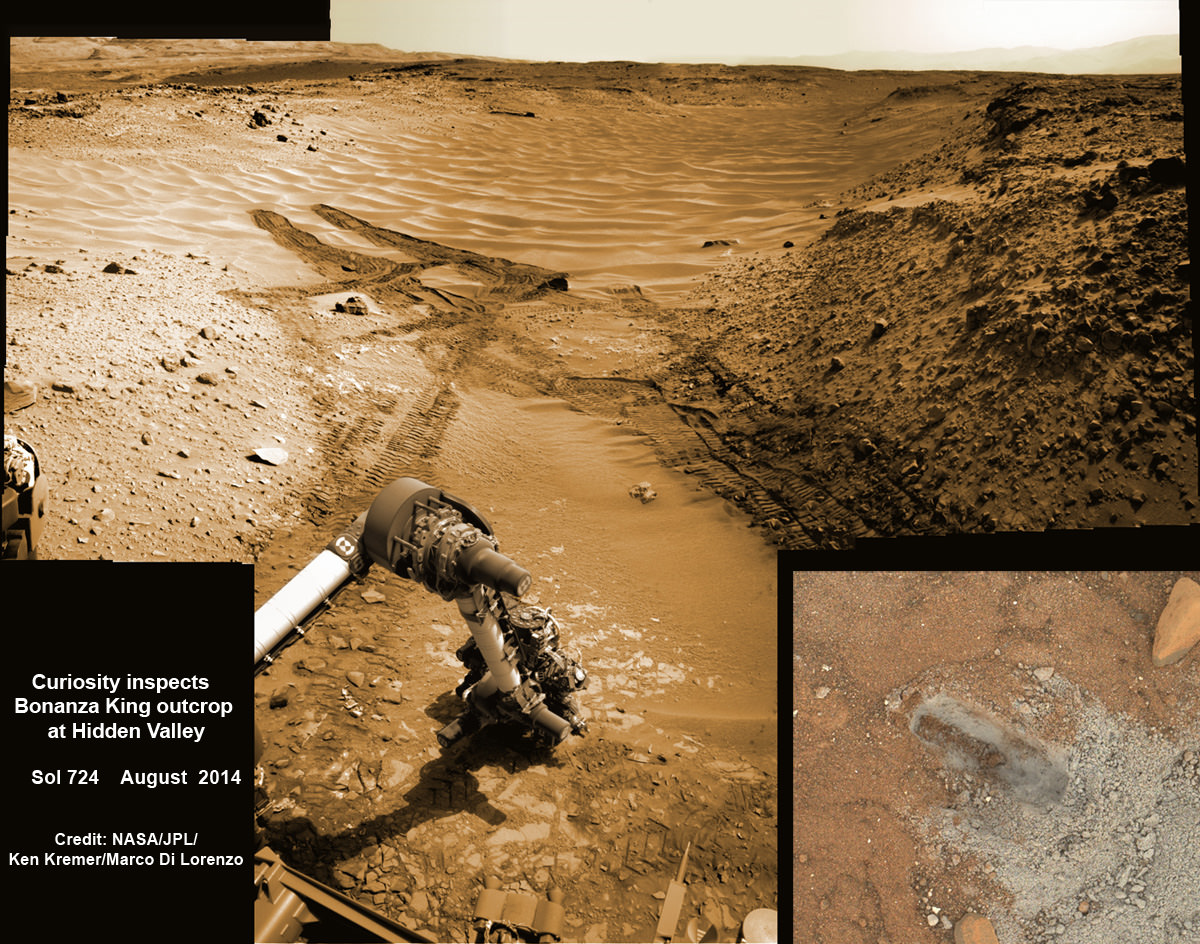
NASA’s Curiosity rover hammers into ‘Bonanza King’ rock outcrop evaluating potential as 4th drill site for sampling at ‘Hidden Valley’ in this photo mosaic view captured on Aug. 20, 2014, Sol 724. Inset MAHLI camera image at right shows resulting rock indentation that caused it to budge and be unsafe for further drilling. Note the background of treacherous sand dune ripples and deep wheel tracks inside Hidden Valley that forced quick exit to alternate route forward. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/MSSS/Ken Kremer-kenkremer.com/Marco Di Lorenzo
NASA’s Curiosity rover will skip drilling into a possible 4th rock target and instead resume the trek to Mount Sharp after finding it was unfortunately a slippery rock at the edge of a Martian valley of slippery sands and was therefore too risky to proceed with deep drilling and interior sampling for chemical analysis.
After pounding into the “Bonanza King” rock outcrop on Wednesday, Aug. 20, to evaluate its potential as Curiosity’s 4th drill target on Mars and seeing that it moved on impact, the team decided it was not even safe enough to continue with the preliminary ‘mini-drill’ operation that day.
So they cancelled the entire drill campaign at “Bonanza King” and decided to set the rover loose to drive onwards to her mountain climbing destination.
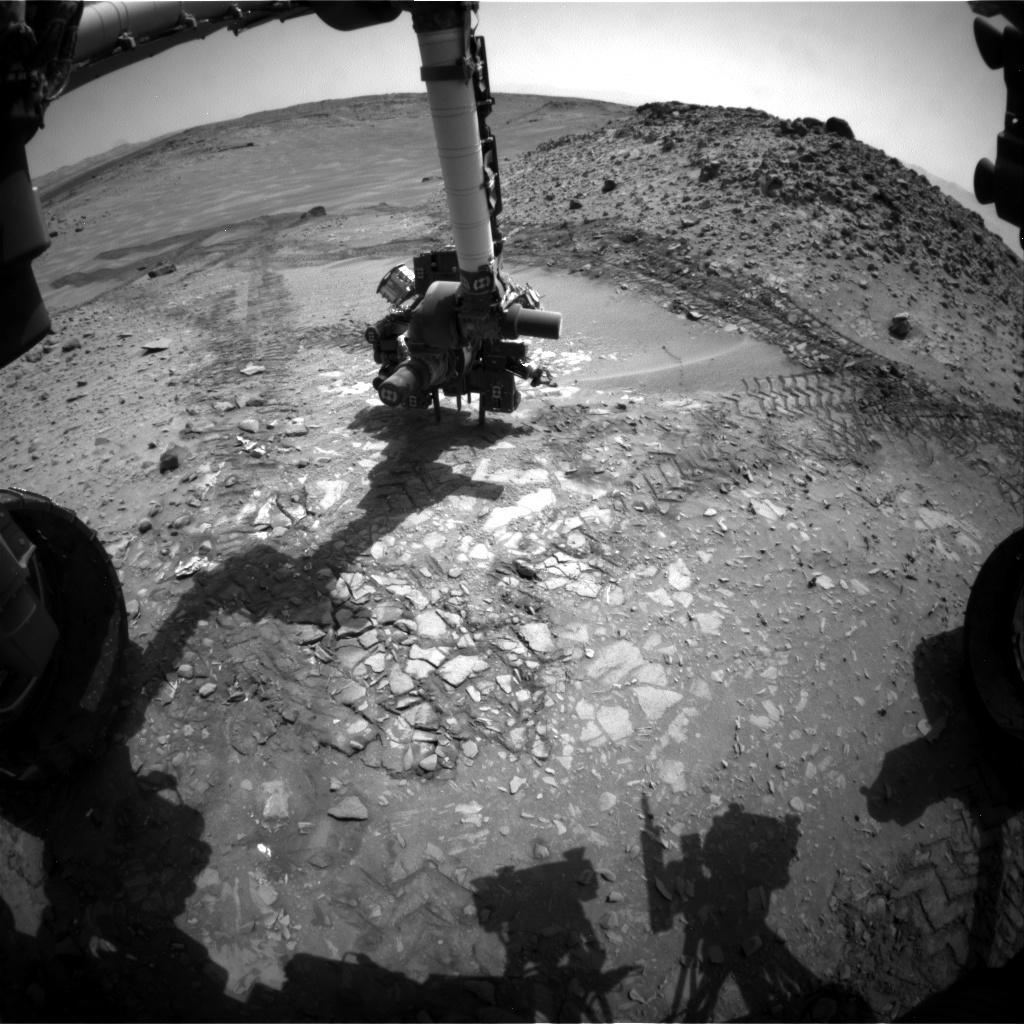
This image from the front Hazcam on NASA’s Curiosity Mars rover shows the rover’s drill in place during a test of whether the rock beneath it, “Bonanza King,” would be an acceptable target for drilling to collect a sample. Subsequent analysis showed the rock budged during the Aug. 19, 2014, test. Credit: NASA/JPL-Caltech
“We have decided that the rocks under consideration for drilling, based on the tests we did, are not good candidates for drilling,” said Curiosity Project Manager Jim Erickson of NASA’s Jet Propulsion Laboratory, Pasadena, California, in a statement.
“Instead of drilling here, we will resume driving toward Mount Sharp.”
Bonanza King was an enticing target because the outcrop possessed thin, white, cross-cutting mineral veins which could indicate that liquid water flowed here in the distant past. Water is a prerequisite for life as we know it.
Loose, unstable rocks pose a prospective hazard to the 1 ton robots hardware and health if they become dislodged during impact by the percussive drill located at the end of the robotic arm.
It’s worth recalling that whirling rocks during the nailbiting Red Planet touchdown two years ago on Aug. 6, 2012, inside Gale Crater are suspected to have slightly damaged Curiosity’s REMS meteorological instrument station.
Each drill target must pass a series of tests. And the prior three at more extensive outcrops all met those criteria. By comparison, imagery showed Bonanza King was clearly part of a much smaller outcrop. See our Bonanza King photo mosaics herein.
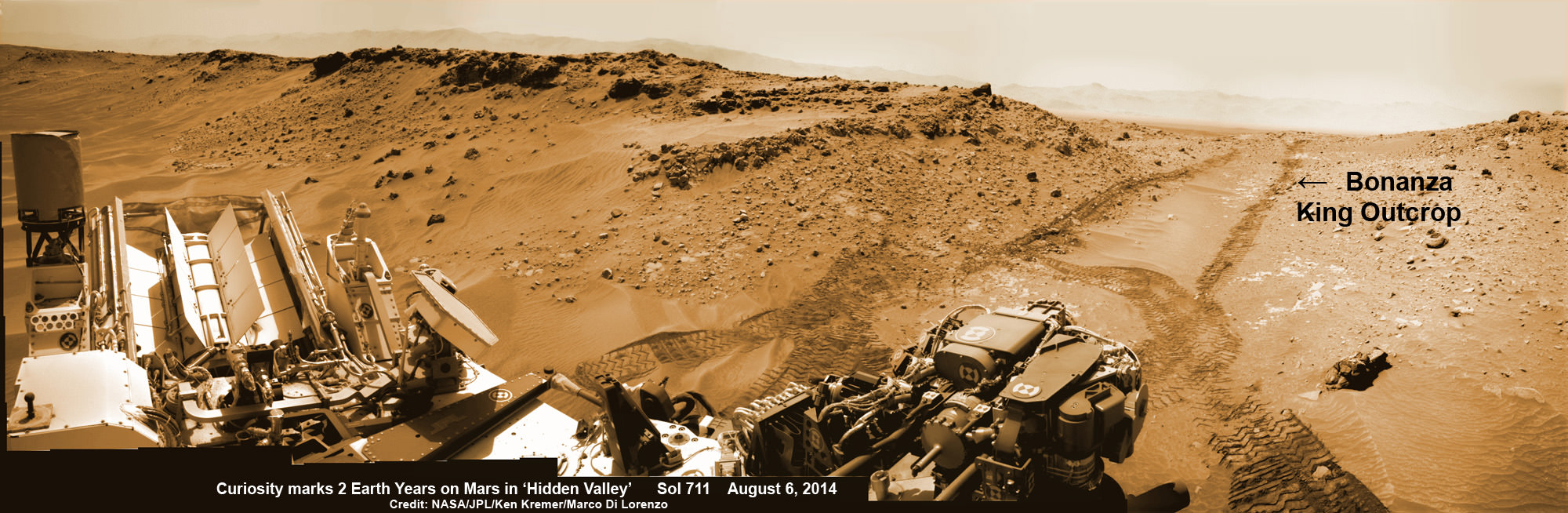
NASA’s Curiosity rover looks back to ramp with potential 4th drill site target at ‘Bonanza King’ rock outcrop in ‘Hidden Valley’ in this photo mosaic view captured on Aug. 6, 2014, Sol 711. Inset shows results of brushing on Aug. 17, Sol 722, that revealed gray patch beneath red dust. Note the rover’s partial selfie, valley walls, deep wheel tracks in the sand dunes and distant rim of Gale crater beyond the ramp. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer-kenkremer.com/Marco Di Lorenzo
“One step in the procedure, called “start hole,” uses the hammering action of the percussive drill to create a small indentation in the rock. During this part of the test, the rock moved slightly, the rover sensed that instability in the target, and protective software properly halted the procedure,” according to a NASA statement.
This pale, flat Martian rock thus failed to pass the team’s safety criteria for drilling when it budged.
Bonanza King sits in an bright outcrop on the low ramp at the northeastern end of a spot leading in and out of an area called “Hidden Valley” which lies between Curiosity’s August 2012 landing site in Gale Crater and her ultimate destinations on Mount Sharp which dominates the center of the crater.
Just days ago, the rover team commanded a quick exit from “Hidden Valley” to backtrack out of the dune filled valley because of fears the six wheeled robot could get stuck in slippery sands extending the length of a football field.
“Hidden Valley” looked like it could turn into “Death Valley.”
As Curiosity tested the outcrop, the rover team was simultaneously searching for an alternate safe path forward to the sedimentary layers of Mount Sharp because she arrived at Hidden Valley after recently driving over a field of sharp edged rocks in the “Zabriskie Plateau” that caused further rips and tears in the already damaged 20 inch diameter aluminum wheels.
It will take a route skirting the north side of the sandy-floored valley taking care to steer away from the pointiest rocks. Curiosity rover looks back to the rocky plains of the Zabriskie plateau from sandy ramp into ‘Hidden Valley’ with 4th drill site target at ‘Bonanza King’ rock outcrop as shown in this photo mosaic view captured on Aug. 14, 2014, Sol 719. Sharp edged rocks at Zabriskie tore new holes into rover wheels. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer-kenkremer.com
“After further analysis of the sand, Hidden Valley does not appear to be navigable with the desired degree of confidence,” Erickson said. “We will use a route avoiding the worst of the sharp rocks as we drive slightly to the north of Hidden Valley.”
To date, Curiosity’s odometer totals over 5.5 miles (9.0 kilometers) since landing inside Gale Crater on Mars in August 2012. She has taken over 179,000 images.
Curiosity still has about another 2 miles (3 kilometers) to go to reach the entry way at a gap in the treacherous sand dunes at the foothills of Mount Sharp sometime later this year.
Hidden Valley gives a foretaste of the rippely slippery sand dune challenges lurking ahead!
Mount Sharp is a layered mountain that dominates most of Gale Crater and towers 3.4 miles (5.5 kilometers) into the Martian sky and is taller than Mount Rainier.
“Getting to Mount Sharp is the next big step for Curiosity and we expect that in the Fall of this year,” Dr. Jim Green, NASA’s Director of Planetary Sciences at NASA Headquarters, Washington, DC, told me in an interview marking the 2nd anniversary since touchdown on Aug. 6.
“Drilling on the crater floor will provide needed geologic context before Curiosity climbs the mountain.”
The team may go back to its original plan to drill at the potential science destination known as “Pahrump Hills” which was changed due to the route change forced by the slippery sands in Hidden Valley.
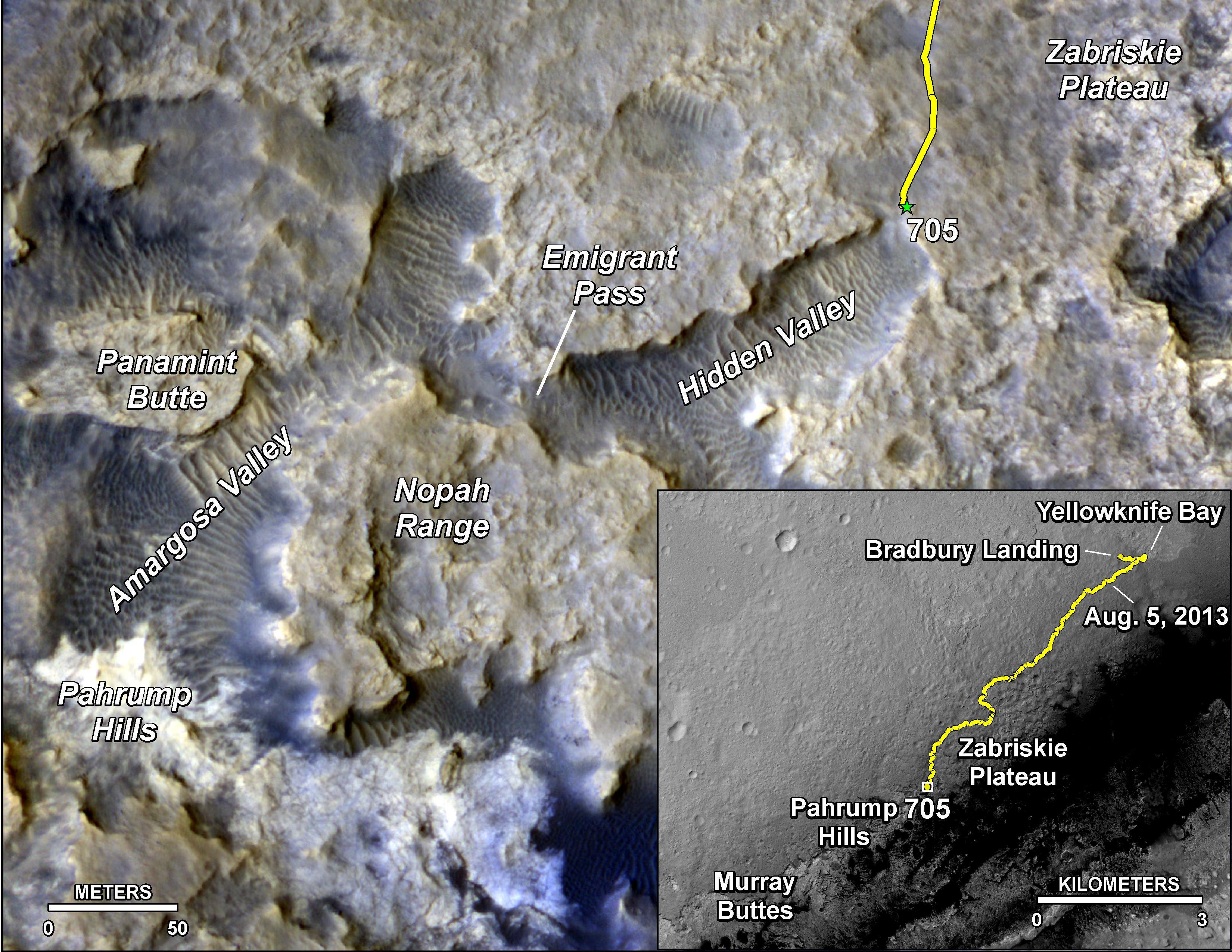
The main map here shows the assortment of landforms near the location of NASA’s Curiosity Mars rover as the rover’s second anniversary of landing on Mars nears. The gold traverse line entering from upper right ends at Curiosity’s position as of Sol 705 on Mars (July 31, 2014). The inset map shows the mission’s entire traverse from the landing on Aug. 5, 2012, PDT (Aug. 6, EDT) to Sol 705, and the remaining distance to long-term science destinations near Murray Buttes, at the base of Mount Sharp. The label “Aug. 5, 2013” indicates where Curiosity was one year after landing. Credit: NASA/JPL-Caltech/Univ. of Arizona
Read an Italian language version of this story by my imaging partner Marco Di Lorenzo – here
Stay tuned here for Ken’s continuing Rosetta, Curiosity, Opportunity, Orion, SpaceX, Boeing, Orbital Sciences, Dream Chaser, commercial space, MAVEN, MOM, Mars and more planetary and human spaceflight news.
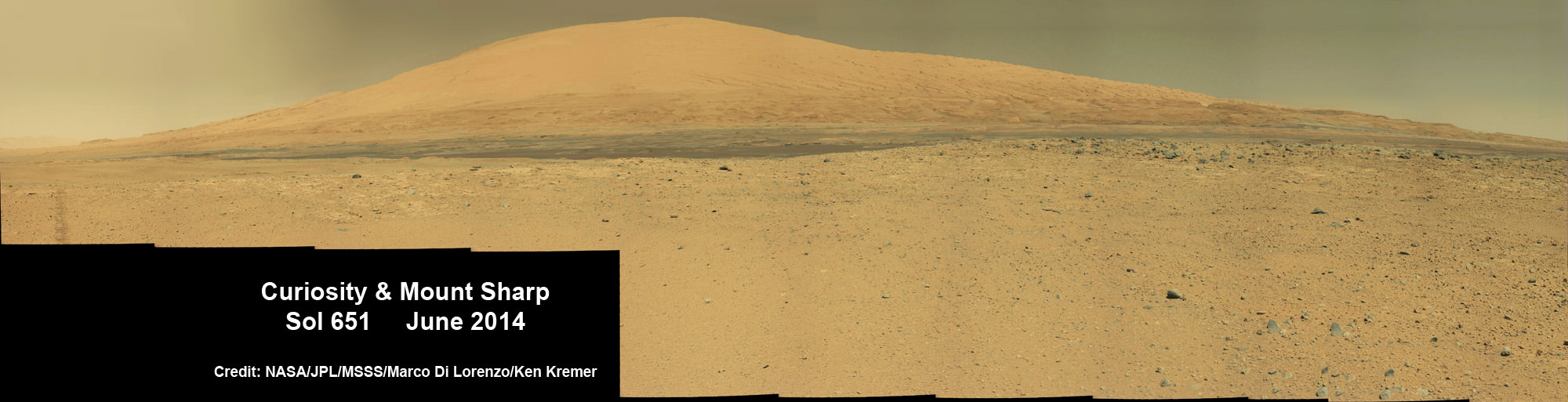
Curiosity rover panorama of Mount Sharp captured on June 6, 2014 (Sol 651) during traverse inside Gale Crater. Note rover wheel tracks at left. She will eventually ascend the mountain at the ‘Murray Buttes’ at right later this year. Assembled from Mastcam color camera raw images and stitched by Marco Di Lorenzo and Ken Kremer. Credit: NASA/JPL/MSSS/Marco Di Lorenzo/Ken Kremer-kenkremer.com Up close view of hole in one of rover Curiosity’s six wheels caused by recent driving over rough Martian rocks. Mosaic assembled from Mastcam raw images taken on Dec. 22, 2013 (Sol 490). Credit: NASA/JPL/MSSS/Ken Kremer – kenkremer.com/Marco Di Lorenzo
Holger Sierks, OSIRIS principal investigator, discusses spectacular hi res comet images returned so far by Rosetta during the Aug. 6 ESA webcast from mission control at ESOC, Darmstadt, Germany. Credit: Roland Keller
Animation Caption: Possible landing sites on Comet 67P/Churyumov-Gerasimenko. The model shows the illumination of the comets surface and regions under landing site consideration for the Philae lander on board ESA’s Rosetta spececraft . Credit: CNES
“The race is on” to find a safe and scientifically interesting landing site for the Philae lander piggybacked on ESA’s Rosetta spacecraft as it swoops in ever closer to the heavily cratered Comet 67P/Churyumov-Gerasimenko since arriving two weeks ago after a decade long chase of 6.4 billion kilometers (4 Billion miles).
Rosetta made history by becoming the first ever probe from Earth to orbit a comet upon arrival on Aug. 6, 2014.
The probe discovered an utterly alien and bizarre icy wanderer that science team member Mark McCaughrean, of ESA’s Science Directorate, delightedly calls a ‘Scientific Disneyland.’
“It’s just astonishing,” he said during a live ESA webcast of the Aug. 6 arrival event.
Now, another audacious and history making event is on tap – Landing on the comet!
To enable a safe landing, Rosetta is moving in closer to the comet to gather higher resolution imaging and spectroscopic data. When Rosetta arrived on Aug. 6, it was initially orbiting at a distance of about 100 km (62 miles). As of today, carefully timed thruster firings have brought it to within about 80 km distance. And it will get far closer.
Right now a top priority task for the science and engineering team leading Rosetta is “Finding a landing strip” for the Philae comet lander.
Philae’s landing on comet 67P is currently scheduled for Nov. 11, 2014. The 100 kg lander is equipped with 10 science instruments
“The challenge ahead is to map the surface and find a landing strip,” said Andrea Accomazzo, ESA Rosetta Spacecraft Operations Manager, at the Aug. 6 ESA webcast.
The team responsibility for choosing the candidate sites comprises “the Landing Site Selection Group (LSSG), which comprises engineers and scientists from Philae’s Science, Operations and Navigation Centre (SONC) at CNES, the Lander Control Centre (LCC) at DLR, scientists representing the Philae Lander instruments, and supported by the ESA Rosetta team, which includes representatives from science, operations and flight dynamics,” according to an ESA statement.
This week the team is intensively combing through a preliminary list of 10 potential landing sites.
Over the weekend they will whittle the list down to five candidate landing sites for continued detailed analysis.
ESA will announce the Top 5 landing site candidates on Monday, Aug. 25.
Where will Philae land?
This image of comet 67P/Churyumov-Gerasimenko shows the diversity of surface structures on the comet’s nucleus. It was taken by the Rosetta spacecraft’s OSIRIS narrow-angle camera on August 7, 2014. At the time, the spacecraft was 65 miles (104 kilometers) away from the 2.5 mile (4 kilometer) wide nucleus. Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA/Enhanced processing Marco Di Lorenzo/Ken Kremer
The decision rests on the results of Rosetta’s ongoing global mapping campaign, including high resolution imaging from the OSIRIS and NAVCAM cameras and further observations from the other science instruments, especially MIRO, VIRTIS, ALICE, GIADA and ROSINA.
The surface criteria for a suitable landing site include day time landing illumination, a balance between day and night to allow the solar panels to recharge the batteries, avoiding steep slopes, large boulders and deep crevasses so it doesn’t topple over.
Of course the team also must consider the comet’s rotation period (12.4 hours) and axis of rotation (see animation at top). Sites near the equator offering roughly equal periods of day and night may be preferred.
The selection of the primary landing site is slated for mid-October after consultation between ESA and the lander team on a “Go/No Go” decision.
The three-legged lander will fire two harpoons and use ice screws to anchor itself to the 4 kilometer (2.5 mile) wide comet’s surface. Philae will collect stereo and panoramic images and also drill 23 centimeters into and sample its incredibly varied surface.
Artist impression of Philae on the surface of comet 67P/Churyumov-Gerasimenko. Credit: ESA/ATG medialab
Read an Italian language version of this story by my imaging partner Marco Di Lorenzo – here
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
NASA’s Curiosity rover looks back to ramp with potential 4th drill site target at ‘Bonanza King’ rock outcrop in ‘Hidden Valley’ in this photo mosaic view captured on Aug. 6, 2014, Sol 711. Inset shows results of brushing on Aug. 17, Sol 722, that revealed gray patch beneath red dust. Note the rover’s partial selfie, valley walls, deep wheel tracks in the sand dunes and distant rim of Gale crater beyond the ramp. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer-kenkremer.com/Marco Di Lorenzo
Curiosity brushes ‘Bonanza King’ drill target on Mars
NASA’s Curiosity rover looks back to ramp with 4th drill site target at ‘Bonanza King’ rock outcrop in ‘Hidden Valley’ in this photo mosaic view captured on Aug. 6, 2014, Sol 711. Inset shows results of brushing on Aug. 17, Sol 722, that revealed gray patch beneath red dust. Note the rover’s partial selfie, valley walls, deep wheel tracks in the sand dunes and distant rim of Gale crater beyond the ramp. Navcam camera raw images stitched and colorized.
Credit: NASA/JPL-Caltech/Ken Kremer-kenkremer.com/Marco Di Lorenzo[/caption]
Eagerly eyeing her next drill site on Mars, NASA’s Curiosity rover laid the groundwork by brushing the chosen rock target called ‘Bonanza King’ on Wednesday, Aug. 17, Sol 722, with the Dust Removal Tool (DRT) and collecting high resolution imagery with the Mast Camera (Mastcam) to confirm the success of the operation.
By brushing aside the reddish, more-oxidized dust scientists and engineers leading the mission observed a gray patch of less-oxidized rock material beneath that they anticipated seeing while evaluating the utility of ‘Bonanza King’ as the rover’s fourth candidate for Red Planet rock drilling and sampling.
To date, the 1-ton robot has drilled into three target rocks to collect sample powder for analysis by the rover’s onboard pair of the chemistry labs, SAM and CheMin, to analyze for the chemical ingredients that could support Martian microbes, if they ever existed.
Curiosity rover used the Dust Removal Tool on its robotic arm to brush aside reddish, more-oxidized dust, revealing a gray patch of less-oxidized rock material at a target called “Bonanza King,” visible in this image from the rover’s Mast Camera (Mastcam). Credit: NASA/JPL-Caltech/MSSS
So far everything is proceeding quite well.
The brushing activity also revealed thin, white, cross-cutting veins which is a further indication that liquid water flowed here in the distant past. Water is a prerequisite for life as we know it.
“They might be sulfate salts or another type of mineral that precipitated out of solution and filled fractures in the rock. These thin veins might be related to wider light-toned veins and features in the surrounding rock,” NASA said in a statement.
Based on these results and more from laser zapping with Curiosity’s Chemistry and Camera (ChemCam) instrument on Sol 719 (Aug. 14, 2014) the team decided to proceed ahead.
The imminent next step is to bore a shallow test hole into the brushed area which measures about about 2.5 inches (6 centimeters) across.
If all goes well with the “mini-drill” operation, the team will proceed quickly with full depth drilling to core a sample from the interior of the dinner plate sized rock slab for delivery to Curiosity’s two chemistry labs.
Bonanza King sits in a bright outcrop on the low ramp at the northeastern end of a spot leading in and out of an area called “Hidden Valley” which lies between Curiosity’s August 2012 landing site in Gale Crater and her ultimate destinations on Mount Sharp which dominates the center of the crater.
Just days ago, the rover team commanded a quick exit from “Hidden Valley” to backtrack out of the dune filled valley because of fears the six wheeled robot could get stuck in slippery sands extending the length of a football field.
As Curiosity drills, the rover team is also searching for an alternate safe path forward to the sedimentary layers of Mount Sharp.
To date, Curiosity’s odometer totals over 5.5 miles (9.0 kilometers) since landing inside Gale Crater on Mars in August 2012. She has taken over 178,000 images.
The main map here shows the assortment of landforms near the location of NASA’s Curiosity Mars rover as the rover’s second anniversary of landing on Mars nears. The gold traverse line entering from upper right ends at Curiosity’s position as of Sol 705 on Mars (July 31, 2014). The inset map shows the mission’s entire traverse from the landing on Aug. 5, 2012, PDT (Aug. 6, EDT) to Sol 705, and the remaining distance to long-term science destinations near Murray Buttes, at the base of Mount Sharp. The label “Aug. 5, 2013” indicates where Curiosity was one year after landing. Credit: NASA/JPL-Caltech/Univ. of Arizona
Curiosity still has about another 2 miles (3 kilometers) to go to reach the entry way at a gap in the treacherous sand dunes at the foothills of Mount Sharp sometime later this year.
Mount Sharp is a layered mountain that dominates most of Gale Crater and towers 3.4 miles (5.5 kilometers) into the Martian sky and is taller than Mount Rainier.
“Getting to Mount Sharp is the next big step for Curiosity and we expect that in the Fall of this year,” Dr. Jim Green, NASA’s Director of Planetary Sciences at NASA Headquarters, Washington, DC, told me in an interview making the 2nd anniversary on Aug. 6.
“Drilling on the crater floor will provide needed geologic context before Curiosity climbs the mountain.”
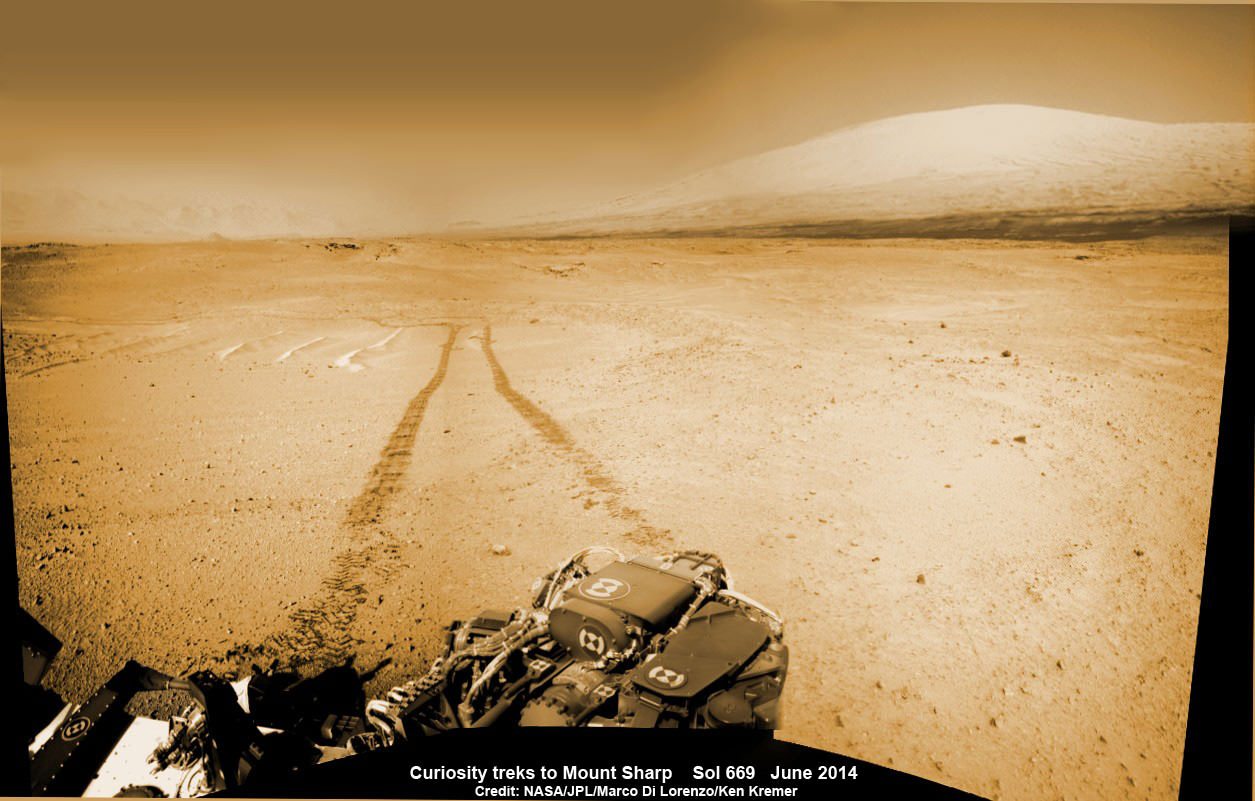
1 Martian Year on Mars! Curiosity treks to Mount Sharp in this photo mosaic view captured on Sol 669, June 24, 2014. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer – kenkremer.com
Read an Italian language version of this story by my imaging partner Marco Di Lorenzo – here
Stay tuned here for Ken’s continuing Rosetta, Curiosity, Opportunity, Orion, SpaceX, Boeing, Orbital Sciences, Dream Chaser, commercial space, MAVEN, MOM, Mars and more planetary and human spaceflight news.
NASA’s Curiosity rover looks back to ramp with 4th drill site target at ‘Bonanza King’ rock outcrop in ‘Hidden Valley’ at site marking her 2nd anniversary on Mars, as shown in this photo mosaic view captured on Aug. 6, 2014, Sol 711. Note the rover’s partial selfie, valley walls, deep wheel tracks in the sand dunes and distant rim of Gale crater beyond the ramp. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer-kenkremer.com/Marco Di Lorenzo
NASA’s Curiosity rover looks back to ramp with 4th drill site target at ‘Bonanza King’ rock outcrop in ‘Hidden Valley’ at site marking her 2nd anniversary on Mars, as shown in this photo mosaic view captured on Aug. 6, 2014, Sol 711. Note the rover’s partial selfie, valley walls, deep wheel tracks in the sand dunes and distant rim of Gale crater beyond the ramp. Navcam camera raw images stitched and colorized.
Credit: NASA/JPL-Caltech/Ken Kremer-kenkremer.com/Marco Di Lorenzo[/caption]
Not wanting to get stuck in a rut, Curiosity’s handlers have commanded NASA’s SUV-sized rover to reverse course and drive out of a potentially hazardous Martian valley of slippery sand with poor wheel traction and instead backtrack towards an enticing nearby spot that the team feels could be the fourth candidate for rock drilling – and thereby widen the scope of the story of habitable environments on the Red Planet.
The new drilling target under up close evaluation right now is named ‘Bonanza King’ – shown in our photo mosaic above.
Bonanza King was chosen after the six wheeled rover unexpectedly experienced significant wheel slippage in the past week while driving over an extended dune field of sandy ripples that basically stopped forward movement inside the Martian valley.
The team was thus in a quandary over whether to push forward on a route through the loose sands of “Hidden Valley” and possibly risk getting mired in a hidden sand trap or drive backwards over a field of sharp rocks on the “Zabriskie plateau” and beyond that are certain to tear further holes in the wheels.
Drilling Candidate Site ‘Bonanza King’ on Mars. This image from the Mast Camera (Mastcam) on NASA’s Curiosity Mars rover shows a portion of the pale rock outcrop that includes the “Bonanza King” target chosen for evaluation as the mission’s fourth rock-drilling site. Raised ridges on the flat rocks — possible mineral veins — are visible at upper and middle right. Tread marks from one of Curiosity’s wheels are visible in the lower half of the image from Sol 707, Aug. 12, 2014. Credit: NASA/JPL-Caltech/MSSS
As reported here last week on the occasion of her 2nd anniversary on Mars since the dramatic touchdown inside Gale Crater on Aug. 6, 2012, Curiosity had been driving merrily through the supposed safe valley of sandy ripples of “Hidden Valley.” She was approaching a bedrock unit named “Pahrump Hills” that for the first time is actually part of the humongous mountain named Mount Sharp she will soon scale and which is the primary science destination of the mission.
But rather soon after driving over a low hump from Zabriskie plateau (see our mosaic below) into Hidden Valley, the robot experienced wheel slippage in the ripples of sand filling the crater floor which was much higher than anticipated. And even worse than comparable test drives in a practice sand lot at JPL.
Curiosity rover looks back to the rocky plains of the Zabriskie plateau from sandy ramp into ‘Hidden Valley’ with 4th drill site target at ‘Bonanza King’ rock outcrop as shown in this photo mosaic view captured on Aug. 14, 2014, Sol 719. Sharp edged rocks at Zabriskie tore new holes into rover wheels. Navcam camera raw images stitched and colorized.
Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer-kenkremer.com
The sandy ripples extend out to the sloping valley walls with no end in sight.
“We need to gain a better understanding of the interaction between the wheels and Martian sand ripples, and Hidden Valley is not a good location for experimenting,” said Curiosity Project Manager Jim Erickson of NASA’s Jet Propulsion Laboratory in Pasadena, California, in a statement.
And since Hidden Valley is as long as a football field and has only two navigable exits at the northeastern and southwestern ends (see map below), the team was forced to drive back to the entrance way at the northern end to consider an alternative route forward to the base of Mount Sharp.
In the meantime while they evaluate the way forward, the team decided that Bonanza King offers similar science to what scientists anticipate at the outcrops at “Pahrump Hills”- a preview of a geological unit that is part of the base of Mount Sharp for the first time since landing rather than still belonging to the floor of Gale Crater.
“Geologically speaking, we can tie the Bonanza King rocks to those at Pahrump Hills. Studying them here will give us a head start in understanding how they fit into the bigger picture of Gale Crater and Mount Sharp,” said Curiosity Deputy Project Scientist Ashwin Vasavada of JPL, in a statement.
Bonanza King sits in an bright outcrop on the low ramp leading in and out of Hidden Valley.
Curiosity rover up close view of ‘Bonanza King’ rock outcrop and 4th drill target looking down from ramp and back into ‘Hidden Valley’ and hazardous dune field of sandy ripples on Aug. 14, 2014, Sol 719. Wheel tracks show where Curiosity drove into the valley, and back out again, earlier in August 2014. The largest of the individual flat rocks in the foreground are a few inches (several centimeters) across. Hazcam camera raw image flattened and colorized. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer – kenkremer.com
It looks like a pale paving stone. Since its location within the geological layers visible on the ramp is similar to what was expected at the Pahrump Hills outcrop, it’s very appealing to the science team.
Furthermore when one of the rovers wheel’s drove over the outcrop, it cracked open one of the rocks and exposed bright interior material, possibly from mineral veins – which is super exciting from a science perspective as a potential marker for flowing liquid water.
Right now the team is collecting spectral data with the science instruments to assess its science utility and is planning a super fast drilling campaign, far shorter than the prior three.
The plan would be to core a sample from the interior of the dinner plate sized rock slab for delivery to Curiosity’s pair of the onboard chemistry labs, SAM and CheMin to analyze for the chemical ingredients to support miartin microbes, if they ever existed.
“This outcrop on the ramp is too appealing to pass up,” Vasavada said.
The main map here shows the assortment of landforms near the location of NASA’s Curiosity Mars rover as the rover’s second anniversary of landing on Mars nears. The gold traverse line entering from upper right ends at Curiosity’s position as of Sol 705 on Mars (July 31, 2014). The inset map shows the mission’s entire traverse from the landing on Aug. 5, 2012, PDT (Aug. 6, EDT) to Sol 705, and the remaining distance to long-term science destinations near Murray Buttes, at the base of Mount Sharp. The label “Aug. 5, 2013” indicates where Curiosity was one year after landing. Credit: NASA/JPL-Caltech/Univ. of Arizona
To date, Curiosity’s odometer totals over 5.5 miles (9.0 kilometers) since landing inside Gale Crater on Mars in August 2012. She has taken over 178,000 images.
Curiosity still has about another 2 miles (3 kilometers) to go to reach the entry way at a gap in the treacherous sand dunes at the foothills of Mount Sharp sometime later this year.
Mount Sharp is a layered mountain that dominates most of Gale Crater and towers 3.4 miles (5.5 kilometers) into the Martian sky and is taller than Mount Rainier.
“Getting to Mount Sharp is the next big step for Curiosity and we expect that in the Fall of this year,” Dr. Jim Green, NASA’s Director of Planetary Sciences at NASA Headquarters, Washington, DC, told me in an interview making the 2nd anniversary on Aug. 6.
Up close view of hole in one of rover Curiosity’s six wheels caused by driving over rough Martian rocks. Mosaic assembled from Mastcam raw images taken on Dec. 22, 2013 (Sol 490). Credit: NASA/JPL/MSSS/Ken Kremer – kenkremer.com/Marco Di Lorenzo
Stay tuned here for Ken’s continuing Rosetta, Curiosity, Opportunity, Orion, SpaceX, Boeing, Orbital Sciences, Dream Chaser, commercial space, MAVEN, MOM, Mars and more planetary and human spaceflight news.
1 Martian Year on Mars!
Curiosity treks to Mount Sharp in this photo mosaic view captured on Sol 669, June 24, 2014. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer – kenkremer.com2 Earth Years on Mars! NASA’s Curiosity rover celebrated the 2nd anniversary on Mars at ‘Hidden Valley’ as shown in this photo mosaic view captured on Aug. 6, 2014, Sol 711. Note the valley walls, rover tracks and distant crater rim. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer-kenkremer.com/Marco Di Lorenzo
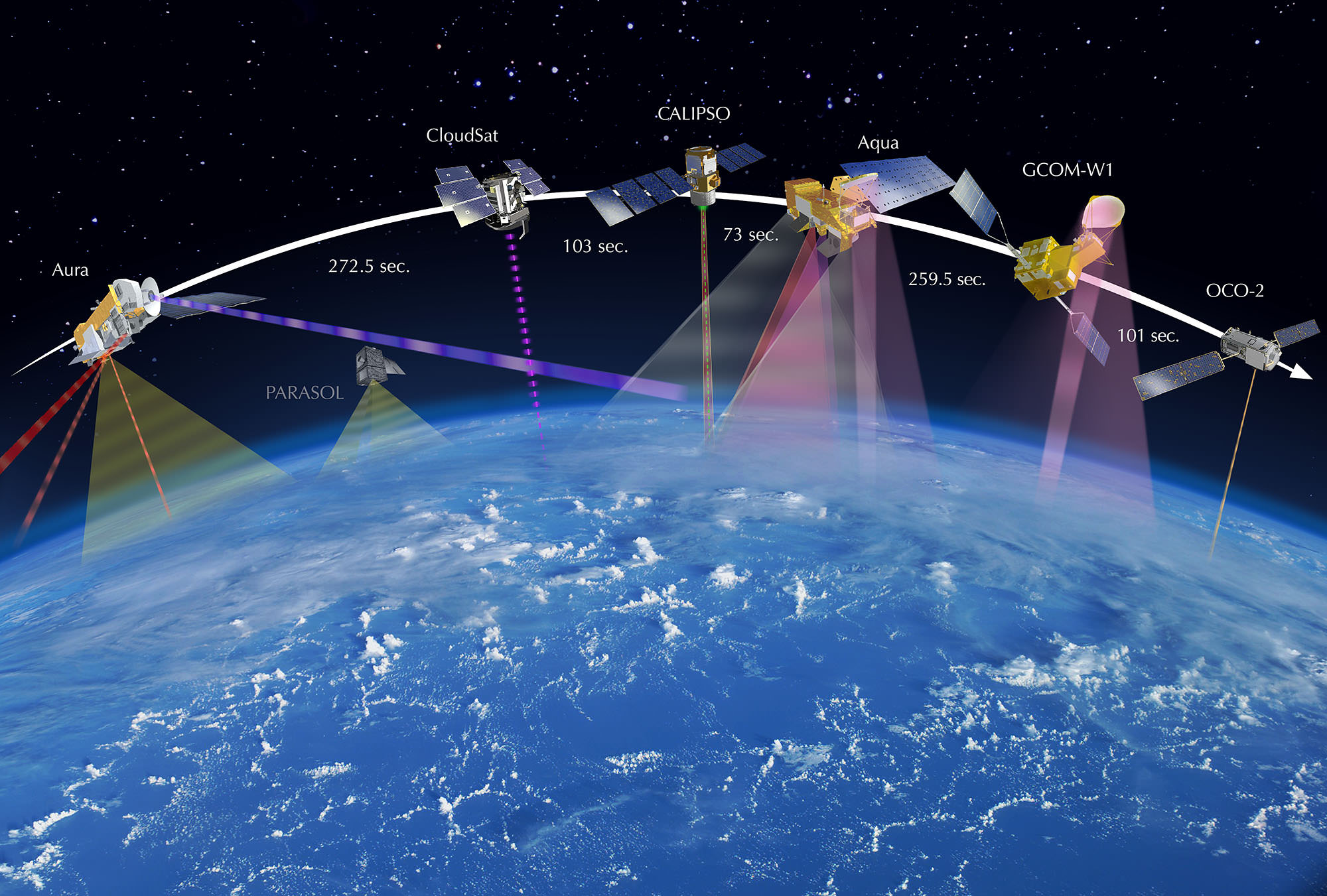
OCO-2 leads the international Afternoon Constellation, or A-Train, of Earth-observing satellites as shown in this artist's concept. Japan’s Global Change Observation Mission - Water (GCOM-W1) satellite and NASA’s Aqua, CALIPSO, CloudSat and Aura satellites follow. Credit: NASA
NASA’s first spacecraft dedicated to studying Earth’s atmospheric climate changing carbon dioxide (CO2) levels and its carbon cycle has reached its final observing orbit and taken its first science measurements as the leader of the world’s first constellation of Earth science satellites known as the International “A-Train.”
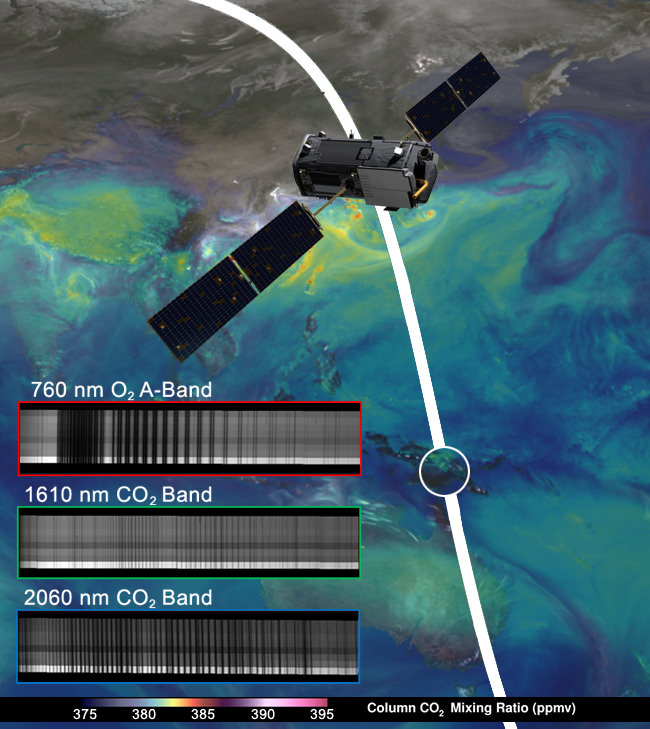
The ‘first light’ measurements were conducted on Aug. 6 as the observatory flew over central Papua New Guinea and confirmed the health of the science instrument. See graphic below.
NASA’s OCO-2 spacecraft collected “first light” data Aug. 6 over New Guinea. OCO-2’s spectrometers recorded the bar code-like spectra, or chemical signatures, of molecular oxygen or carbon dioxide in the atmosphere. The backdrop is a simulation of carbon dioxide created from GEOS-5 model data. Credit: NASA/JPL-Caltech/NASA GSFC
Before the measurements could begin, mission controllers had to cool the observatory’s three-spectrometer instrument to its operating temperatures.
“The spectrometer’s optical components must be cooled to near 21 degrees Fahrenheit (minus 6 degrees Celsius) to bring them into focus and limit the amount of heat they radiate. The instrument’s detectors must be even cooler, near minus 243 degrees Fahrenheit (minus 153 degrees Celsius), to maximize their sensitivity,” according to a NASA statement.
The team still has to complete a significant amount of calibration work before the observatory is declared fully operational.
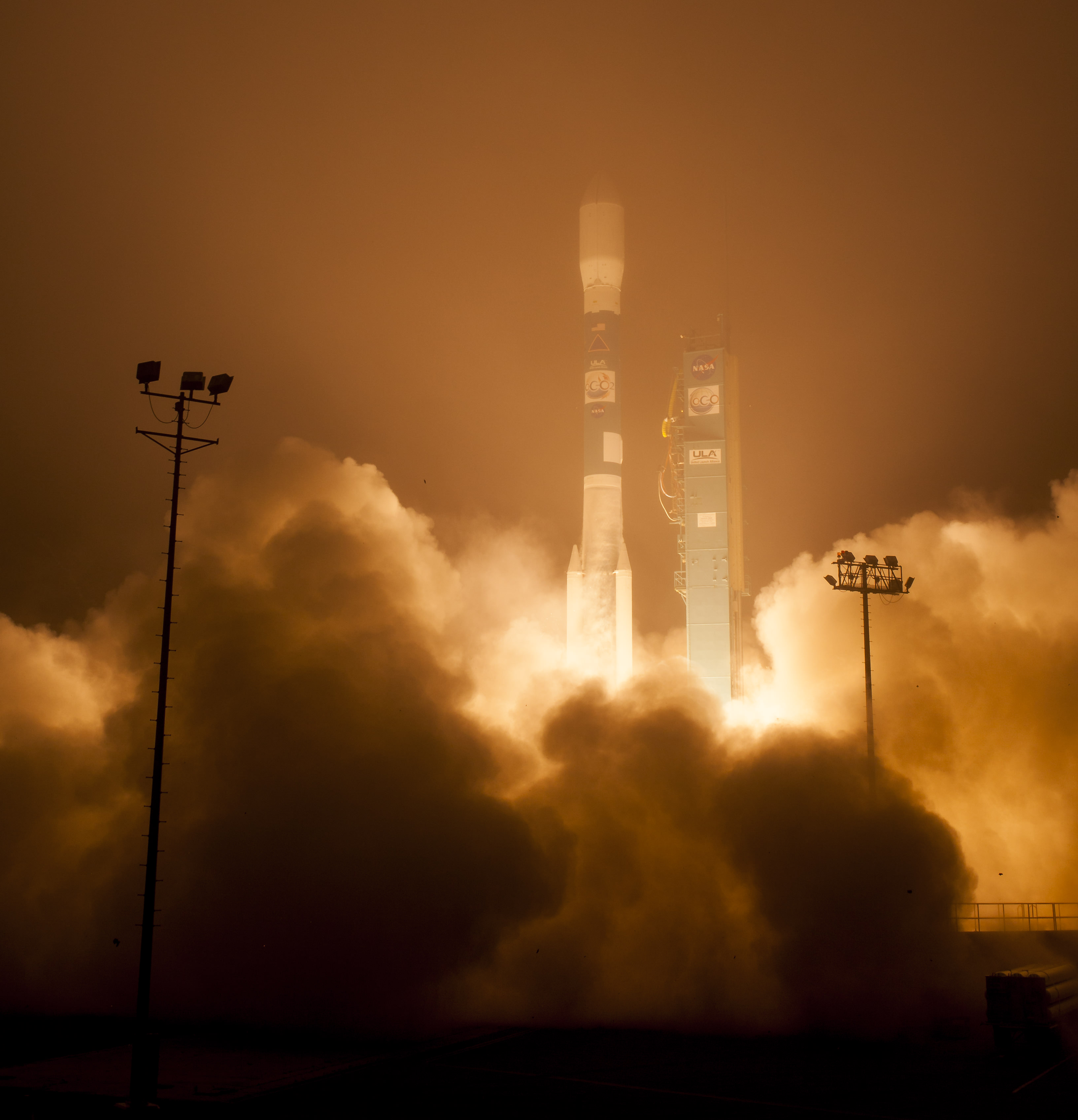
OCO-2 was launched just over a month ago during a spectacular nighttime blastoff on July 2, 2014, from Vandenberg Air Force Base, California, atop a the venerable United Launch Alliance Delta II rocket.
OCO-2 arrived at its final 438-mile (705-kilometer) altitude, near-polar orbit on Aug. 3 at the head of the international A-Train following a series of propulsive burns during July. Engineers also performed a thorough checkout of all of OCO-2’s systems to ensure they were functioning properly.
“The initial data from OCO-2 appear exactly as expected — the spectral lines are well resolved, sharp and deep,” said OCO-2 chief architect and calibration lead Randy Pollock of JPL, in a statement.
“We still have a lot of work to do to go from having a working instrument to having a well-calibrated and scientifically useful instrument, but this was an important milestone on this journey.”
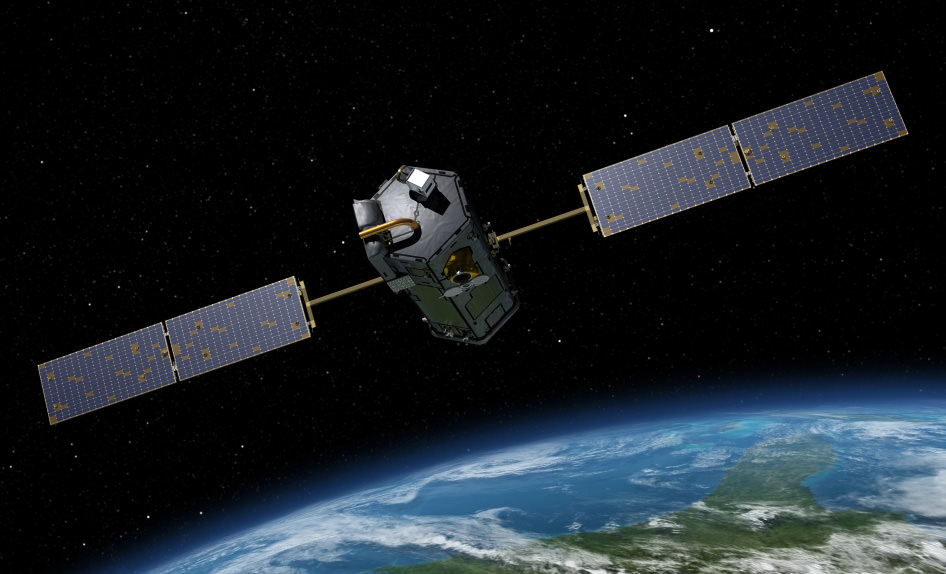
Artist’s rendering of NASA’s Orbiting Carbon Observatory (OCO)-2, one of five new NASA Earth science missions set to launch in 2014, and one of three managed by JPL. Credit: NASA-JPL/Caltech
OCO-2 now leads the A-Train constellation, comprising five other international Earth orbiting monitoring satellites that constitute the world’s first formation-flying “super observatory” that collects an unprecedented quantity of nearly simultaneous climate and weather measurements.
Scientists will use the huge quantities of data to record the health of Earth’s atmosphere and surface environment as never before possible.
OCO-2 is followed in orbit by the Japanese GCOM-W1 satellite, and then by NASA’s Aqua, CALIPSO, CloudSat and Aura spacecraft, respectively. All six satellites fly over the same point on Earth within 16 minutes of each other. OCO-2 currently crosses the equator at 1:36 p.m. local time.
OCO-2 poster. Credit: ULA/NASA
The 999 pound (454 kilogram) observatory is the size of a phone booth.
OCO-2 is equipped with a single science instrument consisting of three high-resolution, near-infrared spectrometers fed by a common telescope. It will collect global measurements of atmospheric CO2 to provide scientists with a better idea of how CO2 impacts climate change and is responsible for Earth’s warming.
During a minimum two-year mission the $467.7 million OCO-2 will take near global measurements to locate the sources and storage places, or ‘sinks’, for atmospheric carbon dioxide, which is a critical component of the planet’s carbon cycle.
OCO-2 was built by Orbital Sciences as a replacement for the original OCO which was destroyed during the failed launch of a Taurus XL rocket from Vandenberg back in February 2009 when the payload fairing failed to open properly and the spacecraft plunged into the ocean.
The OCO-2 mission will provide a global picture of the human and natural sources of carbon dioxide, as well as their “sinks,” the natural ocean and land processes by which carbon dioxide is pulled out of Earth’s atmosphere and stored, according to NASA.
Here’s a NASA description of how OCO-2 collects measurements.
As OCO-2 flies over Earth’s sunlit hemisphere, each spectrometer collects a “frame” three times each second, for a total of about 9,000 frames from each orbit. Each frame is divided into eight spectra, or chemical signatures, that record the amount of molecular oxygen or carbon dioxide over adjacent ground footprints. Each footprint is about 1.3 miles (2.25 kilometers) long and a few hundred yards (meters) wide. When displayed as an image, the eight spectra appear like bar codes — bright bands of light broken by sharp dark lines. The dark lines indicate absorption by molecular oxygen or carbon dioxide.
It will record around 100,000 precise individual CO2 measurements around the worlds entire sunlit hemisphere every day and help determine its source and fate in an effort to understand how human activities impact climate change and how we can mitigate its effects.
OCO-2 mission description. Credit: NASA
At the dawn of the Industrial Revolution, there were about 280 parts per million (ppm) of carbon dioxide in Earth’s atmosphere. As of today the CO2 level has risen to about 400 parts per million, which is the most in at least 800,000 years, says NASA.
OCO-2 is the second of NASA’s five new Earth science missions planned to launch in 2014 and is designed to operate for at least two years during its primary mission. It follows the successful blastoff of the joint NASA/JAXA Global Precipitation Measurement (GPM) Core Observatory satellite on Feb 27.
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
The Orbiting Carbon Observatory-2, NASA’s first mission dedicated to studying carbon dioxide in Earth’s atmosphere, lifts off from Vandenberg Air Force Base, California, at 2:56 a.m. Pacific Time, July 2, 2014 on a Delta II rocket. The two-year mission will help scientists unravel key mysteries about carbon dioxide. Credit: NASA/Bill Ingalls
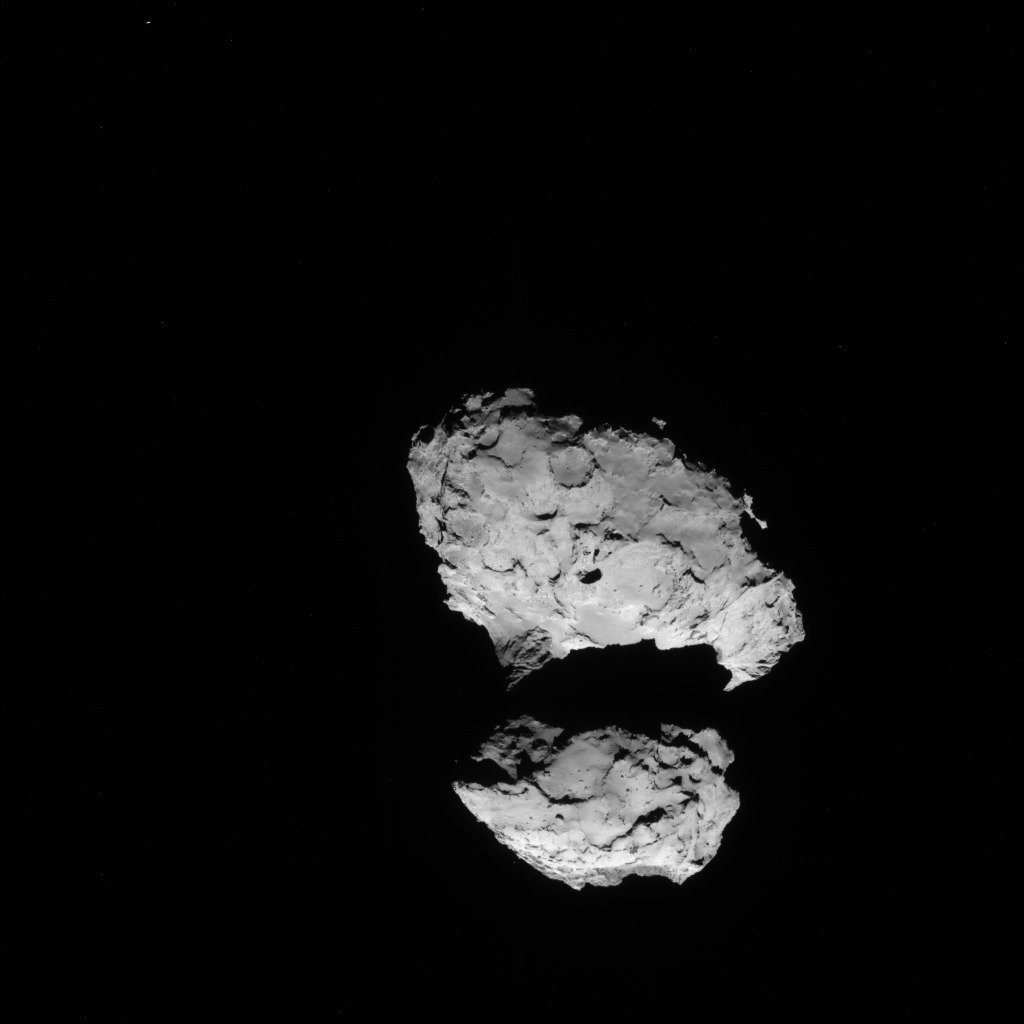
Rosetta NAVCAM image taken on 10 August 2014 from a distance of about 110 km from comet 67P/Churyumov-Gerasimenko. The comet nucleus is about 4 km across. Credit: ESA/Rosetta/NAVCAM
With the historic arrival of the European Space Agency’s (ESA) Rosetta spacecraft at destination Comet 67P/Churyumov-Gerasimenko flawlessly accomplished on August 6, 2014 after a decade long journey, ground breaking up close science at this bizarre world has begun while the team diligently and simultaneously searches for a landing site for the attached Philae comet lander.
Rosetta started collecting cometary dust from the coma encircling the comet’s nucleus with the onboard COSIMA instrument on Sunday, August 10, 2014 as the spacecraft orbits around and ahead of the icy wanderer from a distance of approximately 100 kilometers (62 miles). See coma image below.
Hopes are high that unprecedented science discoveries await at this alien world described as a “Scientific Disneyland,” by Mark McCaughrean, senior scientific adviser to ESA’s Science Directorate, during ESA’s live arrival day webcast. “It’s just astonishing.”
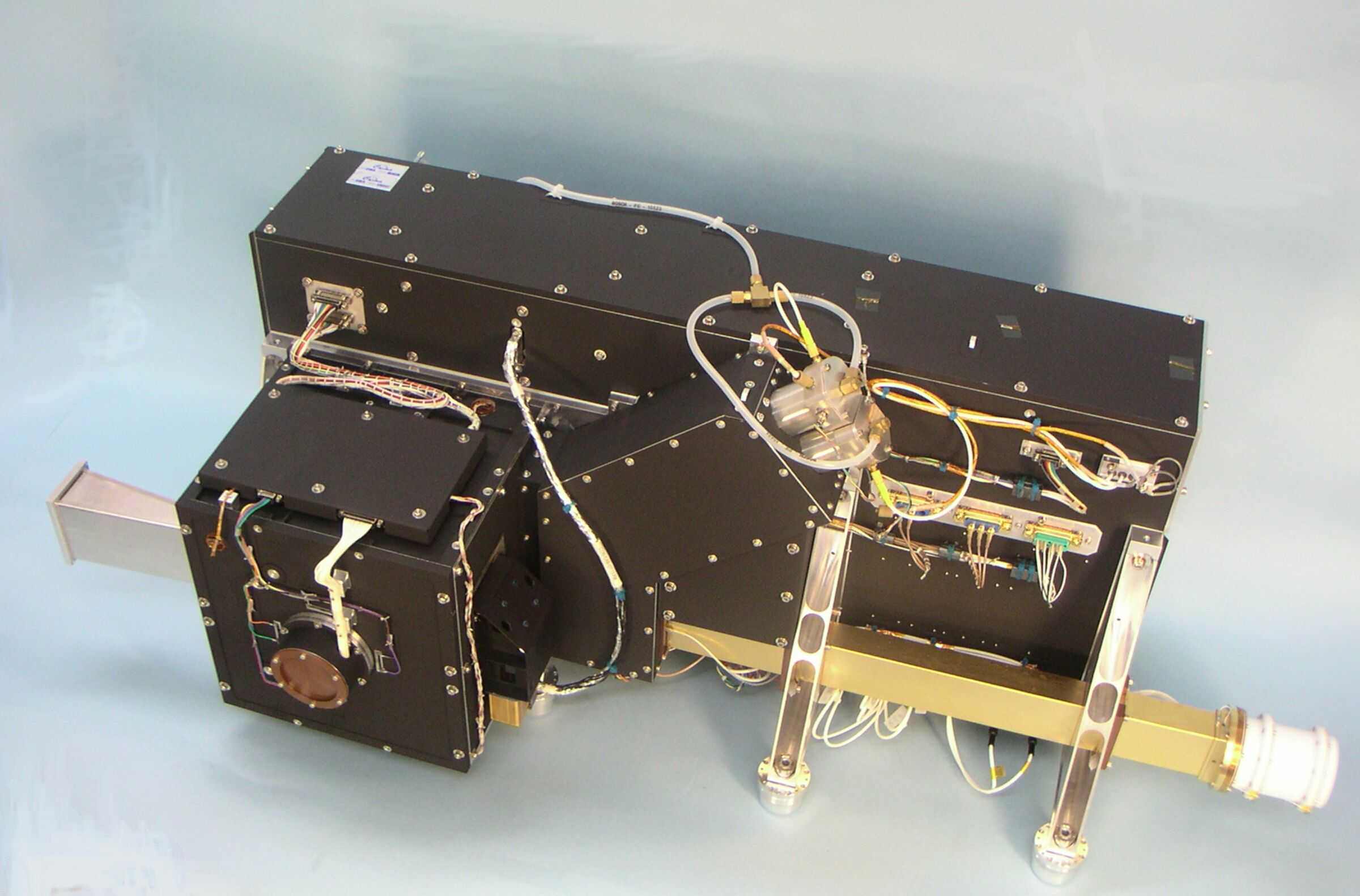
COSIMA stands for Cometary Secondary Ion Mass Analyser and is one of Rosetta’s suite of 11 state-of-the-art science instruments with a combined mass of 165 kg.
Its purpose is to conduct the first “in situ” analysis of the grains of dust particles emitted from the comets nucleus and determine their physical and chemical characteristics, including whether they are organic or inorganic – in essence what is cometary dust material made of and how it differs from the surface composition.
COSIMA will collect the coma dust using 24 specially designed ‘target holders’ – the first of which was opened to study the comets environment on Aug. 10. Since the comet is not especially active right now, the team plans to keep the target holder open for at least a month and check the progress of any particle collections on a weekly basis.
COSISCOPE image of the first target taken on 19 July 2014 (before the exposure, on 10 August, for cometary dust collection). The 1×1 cm target consists of a gold plate covered with a thin layer (30 µm) of gold nanoparticles (“gold black”). Illumination is by two LEDs, from the right side in this case. The bright dots on the vertical strip on the right side are used for target identification and for defining the coordinate system. Credits: ESA/Rosetta/MPS for COSIMA Team MPS/CSNSM/UNIBW/TUORLA/IWF/IAS/ESA/BUW/MPE/LPC2E/LCM/FMI/UTU/LISA/UOFC/vH&S
In fact the team says the coma environment “is still comparable to a high-quality cleanroom”at this time.
But everyone expects that to change radically as Rosetta continues escorting Comet 67P as it loops around the sun, getting closer and warming the surface every day and until reaching perihelion in August 2015.
COSIMA is managed by the Max Planck Institute for Solar System Research (Max-Planck-Institut für Sonnensystemforschung ) in Katlenburg-Lindau, Germany, with Principal Investigator Martin Hilchenbach.
There are also substantial contributions from the Institut d’Astrophysique Spatiale in France, Finnish Meteorological Institute, Osterreichisches Forschungszentrum Seibersdorf and more.
The target holders measure about one square centimeter and were developed by the Universität der Bundeswehr in Germany.
Each of these targets measures one square centimeter and is comprised of a gold plate covered with a thin 30 µm layer of gold nanoparticles (“gold black”) which the team says should “decelerate and capture cometary dust particles impacting with velocities of ~100 m/s.”
The target will be illuminated by a pair of LED’s to find the dust particles. The particles will be analyzed by COSIMA’s built in mass spectrometer after being located on the target holder by the French supplied COSISCOPE microscopic camera and ionized by a beam of indium ions.
Photo of the COSIMA (Cometary Secondary Ion Mass Analyser) instrument on Rosetta. Credit: Max Planck Institute for Solar System Research/ESA
The team expects any grains found on the first target to be analyzed by mid-September 2014.
“COSIMA uses the method of Secondary Ion Mass Spectrometry. They will be fired at with a beam of Indium ions. This will spark individual ions (we say secondary ions) from their surfaces, which will then be analysed with COSIMA’s mass spectrometer,” according to a description from the COSIMA team.
The mass spec has the capability to analyze the elemental composition in an atomic mass range of 1 to 4000 atomic mass units, determine isotopic abundances of some key elements, characterize organic components and functional groups, and conduct mineralic and petrographic characterization of the inorganic phases, all of which will inform as as never before about solar system chemistry.
Comets are leftover remnants from the formation of the solar system. Scientists believe they delivered a vast quantity of water to Earth. They may have also seeded Earth with organic molecules – the building blocks of life as we know it.
Any finding of organic molecules and their identification by COSIMA will be a major discovery for Rosetta and ESA and inform us about the origin of life on Earth.
Data obtained so far from Rosetta’s VIRTIS instrument indicates the comets surface is too hot to be covered in ice and must instead have a dark, dusty crust.
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
ESA’s Rosetta Spacecraft nears final approach to Comet 67P/Churyumov-Gerasimenko in late July 2014. This collage of imagery from Rosetta combines Navcam camera images at right taken nearing final approach from July 25 (3000 km distant) to July 31, 2014 (1327 km distant), with OSIRIS wide angle camera image at left of comet’s expanding coma cloud on July 25. Images to scale and contrast enhanced to show further detail. Credit: ESA/Rosetta/NAVCAM/OSIRIS/MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Collage/Processing: Marco Di Lorenzo/Ken Kremer