

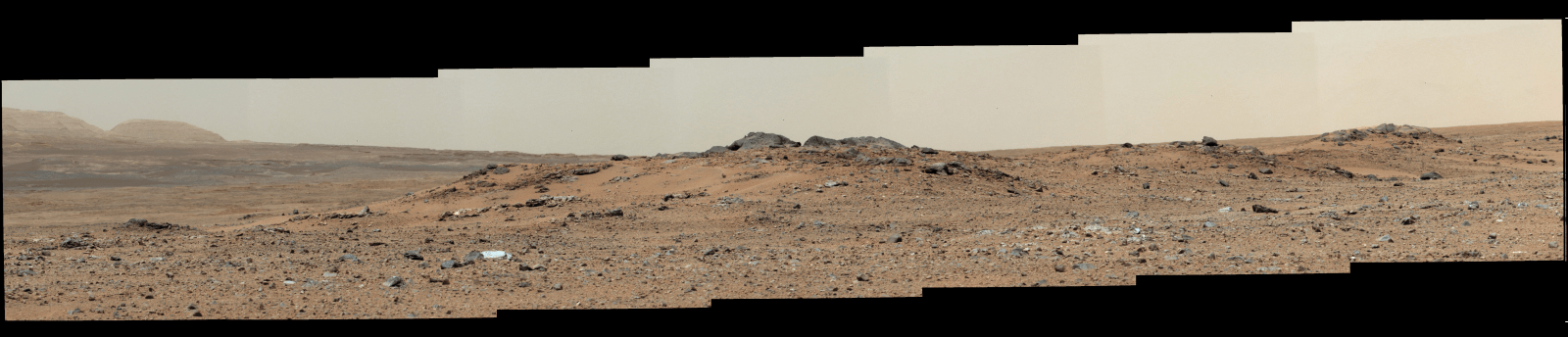
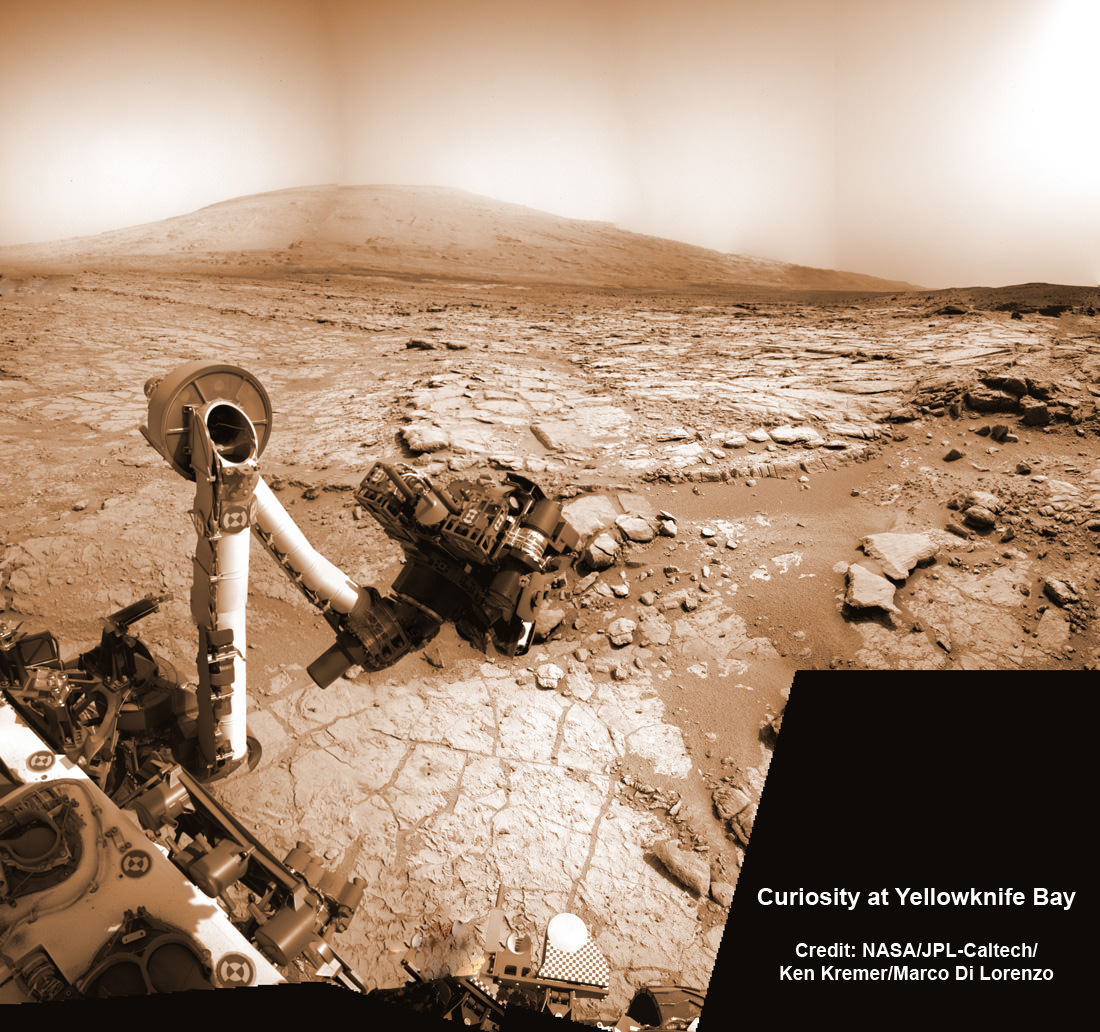
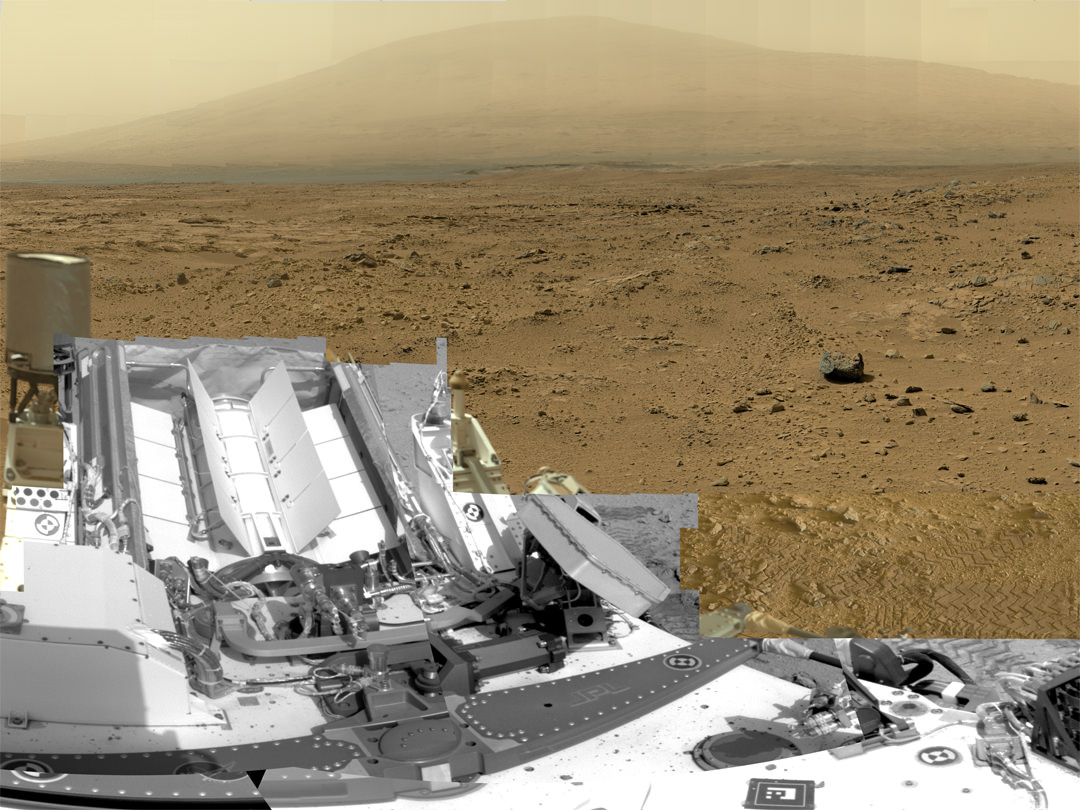
Curiosity accomplished Historic 1st drilling into Martian rock at John Klein outcrop on Feb 8, 2013 (Sol 182), shown in this context mosaic view of the Yellowknife Bay basin taken on Jan. 26 (Sol 169). The robotic arm is pressing down on the surface at John Klein outcrop of veined hydrated minerals – dramatically back dropped with her ultimate destination; Mount Sharp.
Credit: NASA/JPL-Caltech/Ken Kremer/Marco Di Lorenzo
Story updated with further details[/caption]
NASA’s mega Mars rover Curiosity is celebrating 1 Year on the Red Planet since the dramatic landing on Aug. 6, 2012 by reveling in a string of groundbreaking science discoveries demonstrating that Mars could once have supported past life – thereby accomplishing her primary science goal – and with a promise that the best is yet to come!
“We now know Mars offered favorable conditions for microbial life billions of years ago,” said the mission’s project scientist, John Grotzinger of the California Institute of Technology in Pasadena.
“Curiosity has landed in an ancient river or lake bed on Mars,” Jim Green, Director of NASA’s Planetary Science Division, told Universe Today.
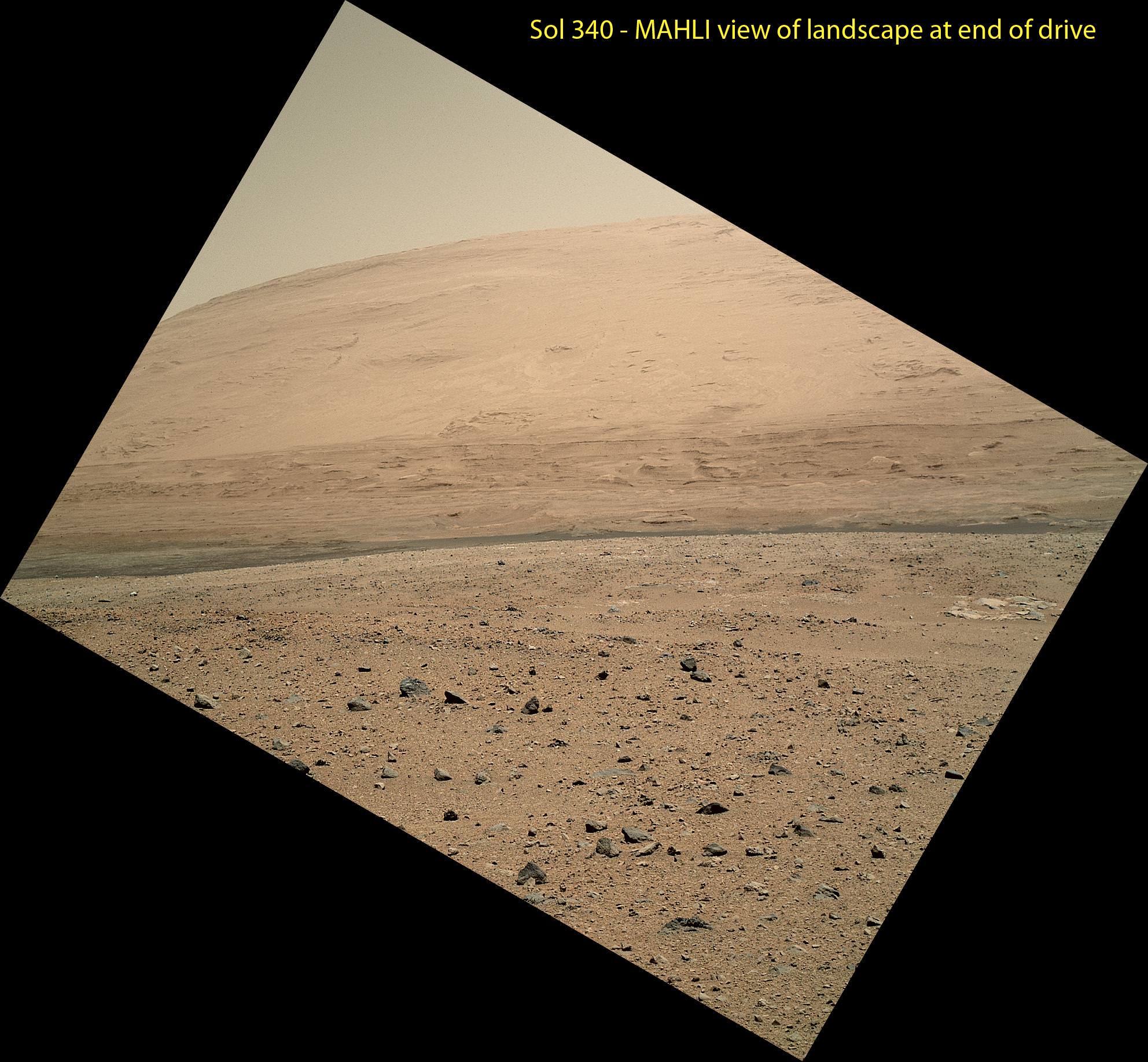
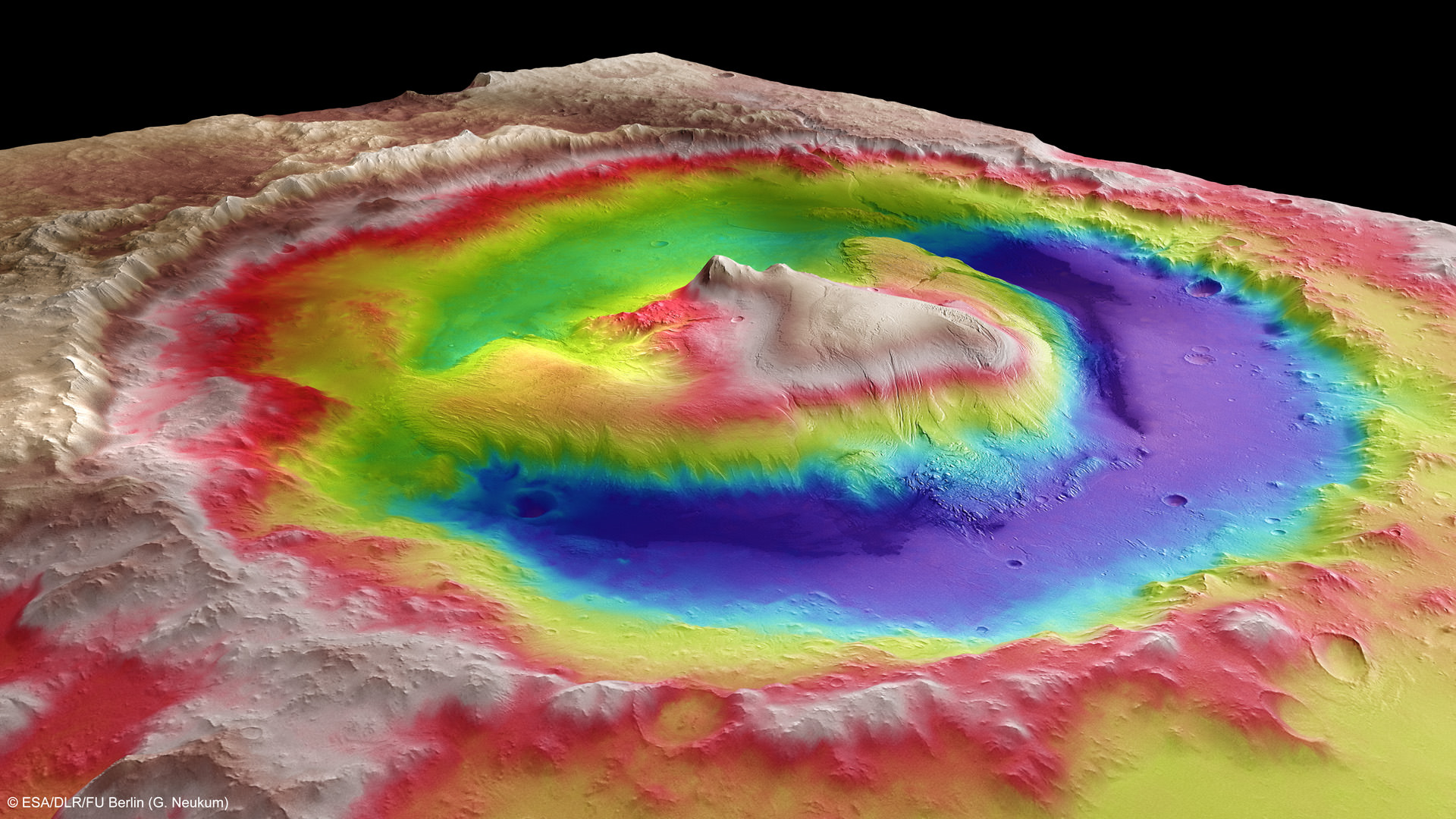
Curiosity is now speeding onwards towards Mount Sharp, the huge 3.4 mile (5. 5 km) mountain dominating the center of her Gale Crater landing site – and which is the primary destination of the mission.
During Year 1, Curiosity has transmitted over 190 gigabits of data, captured more than 71,000 images, fired over 75,000 laser shots to investigate the composition of rocks and soil and drilled into two rocks for sample analysis by the pair of state-of-the-art miniaturized chemistry labs housed in her belly – SAM & CheMin.
“From the sophisticated instruments on Curiosity the data tells us that this region could have been habitable in Mars’ distant past,” Green told me.
“This is a major step forward in understanding the history and evolution of Mars.”
And just in the nick of time for her 1 year anniversary, the car sized robot just passed the 1 mile (1.6 kilometer) driving mark on Aug. 1, or Sol 351.
Mount Sharp still lies roughly 5 miles (8 kilometers) distant – as the Martian crow flies.
“We will be on a general heading of southwest to Mount Sharp,” Jim Erickson, Curiosity Project Manager of NASA’s Jet Propulsion Laboratory (JPL), told Universe Today in an exclusive interview. See the NASA JPL route maps below.
“We have been going through various options of different planned routes.”
How long will the journey to Mount Sharp take?
“Perhaps about a year,” Erickson told me.
“We have put some new software – called autonav, or autonomous navigation – on the vehicle right after the conjunction period back in March 2013. This will increase our ability to drive.”
“We are trying to make that significantly faster by bringing the new autonav online. That will help. But how much it helps really depends on the terrain.”
So far the terrain has not been problematical.
“Things are going very well and we have a couple of drives under our belt,” said Erickson, since starting the long trek to Mount Sharp about a month ago.
The lower reaches of Mount Sharp are comprised of exposed geological layers of sedimentary materials that formed eons ago when Mars was warmer and wetter, and much more hospitable to microscopic life.
“It has been gratifying to succeed, but that has also whetted our appetites to learn more,” says Grotzinger. “We hope those enticing layers at Mount Sharp will preserve a broad diversity of other environmental conditions that could have affected habitability.”
Indeed, Curiosity’s breakthrough discovery that the surface of Mars possesses the key chemical ingredients required to sustain microbial life in a habitable zone, has emboldened NASA to start mapping out the future of Mars exploration.
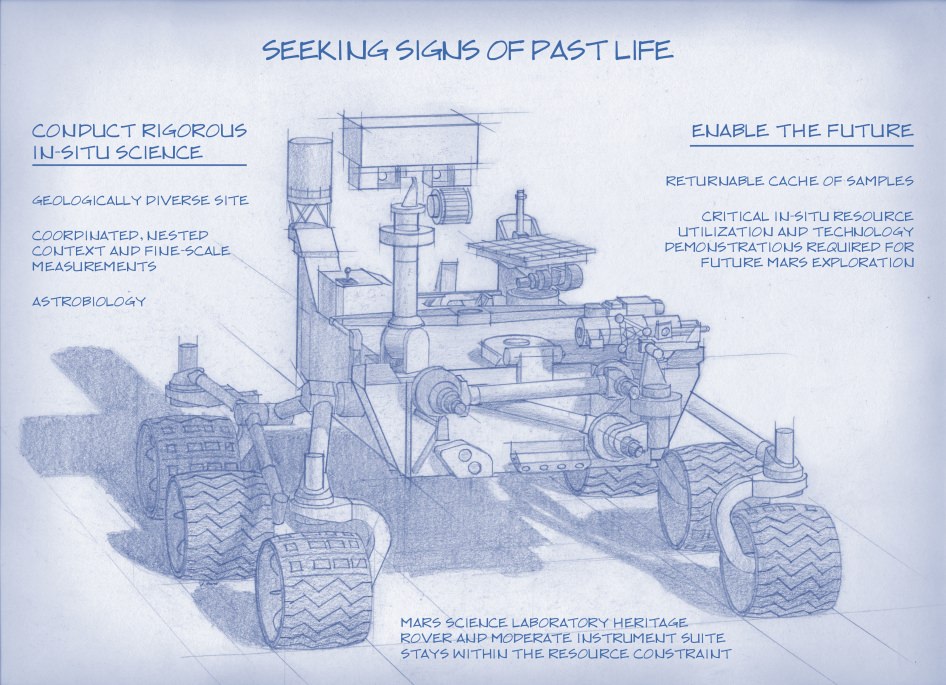
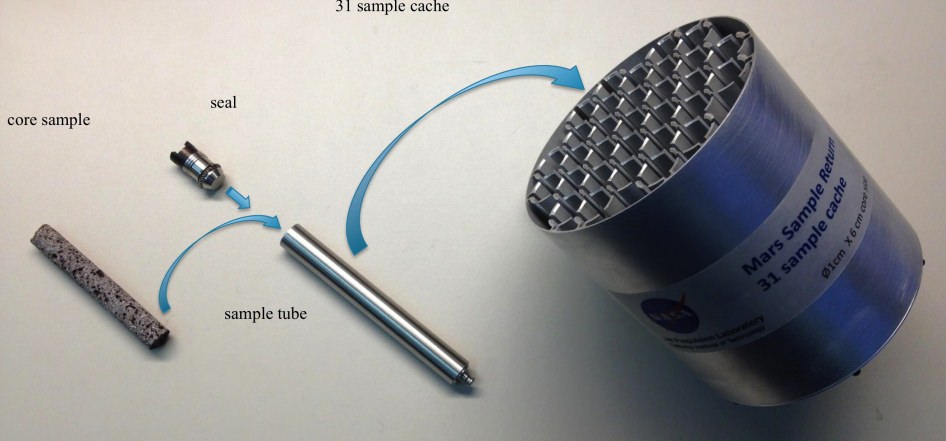
NASA announced plans to start work on a follow on robotic explorer launching in 2020 and develop strategies for returning Martian samples to Earth and dispatching eventual human missions to Mars in the 2030’s using the new Orion capsule and SLS Heavy lift rocket.
“NASA’s Mars program is back on track with the 2016 InSight lander and the 2020 rover,” Jim Green, Director of NASA’s Planetary Science Division, told Universe Today in an interview.
“Successes of our Curiosity — that dramatic touchdown a year ago and the science findings since then — advance us toward further exploration, including sending humans to an asteroid and Mars,” said NASA Administrator Charles Bolden in a statement.
“Wheel tracks now, will lead to boot prints later.”
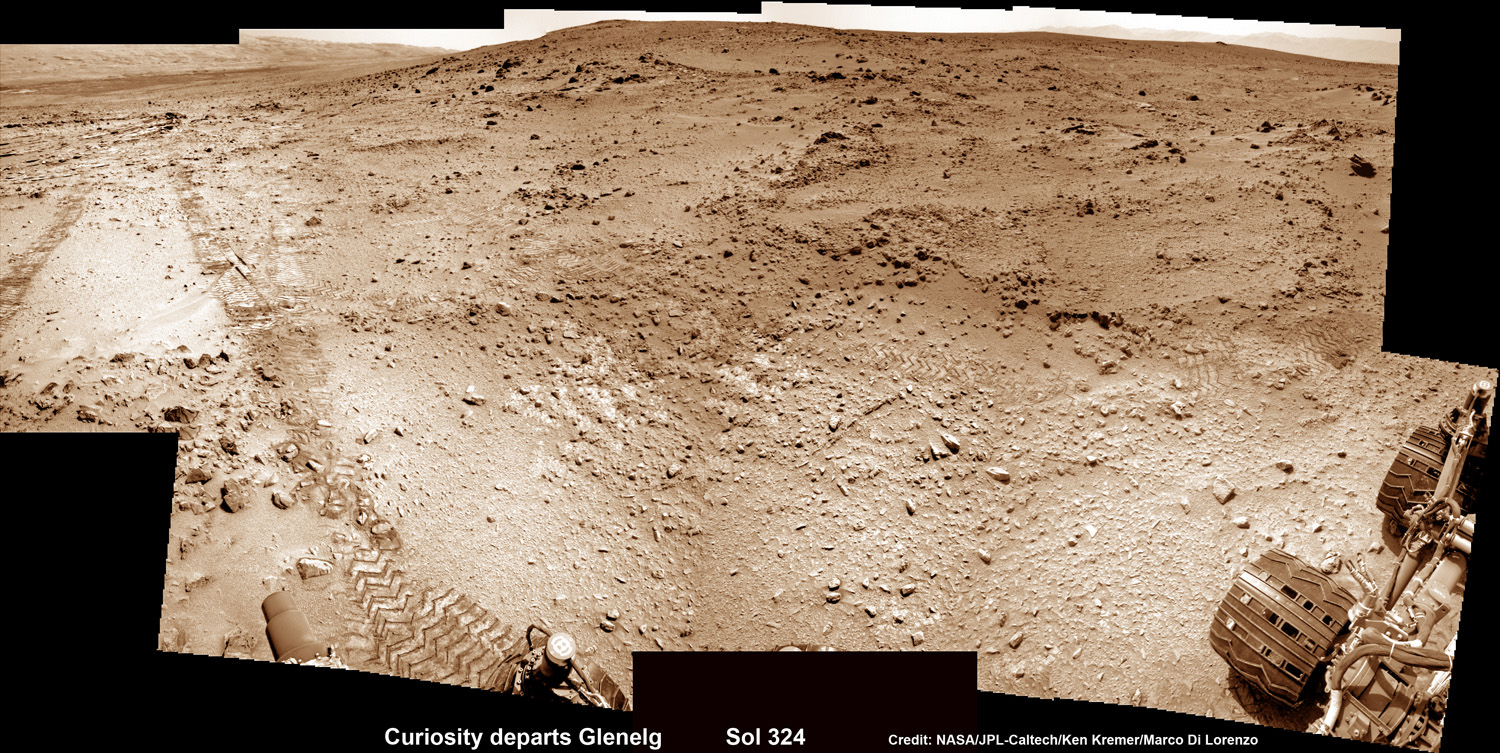
Following the hair-raising touchdown using with the never before used sky-crane descent thrusters, the science team directed the 1 ton robot to drive to a nearby area of interesting outcrops on the Gale crater floor – at a place called Glenelg and Yellowknife Bay.
Along the way, barely 5 weeks after landing, Curiosity found a spot laden with rounded pebbles at the Hottah outcrop of concretions that formed in an ancient stream bed where hip deep liquid water once flowed rather vigorously.
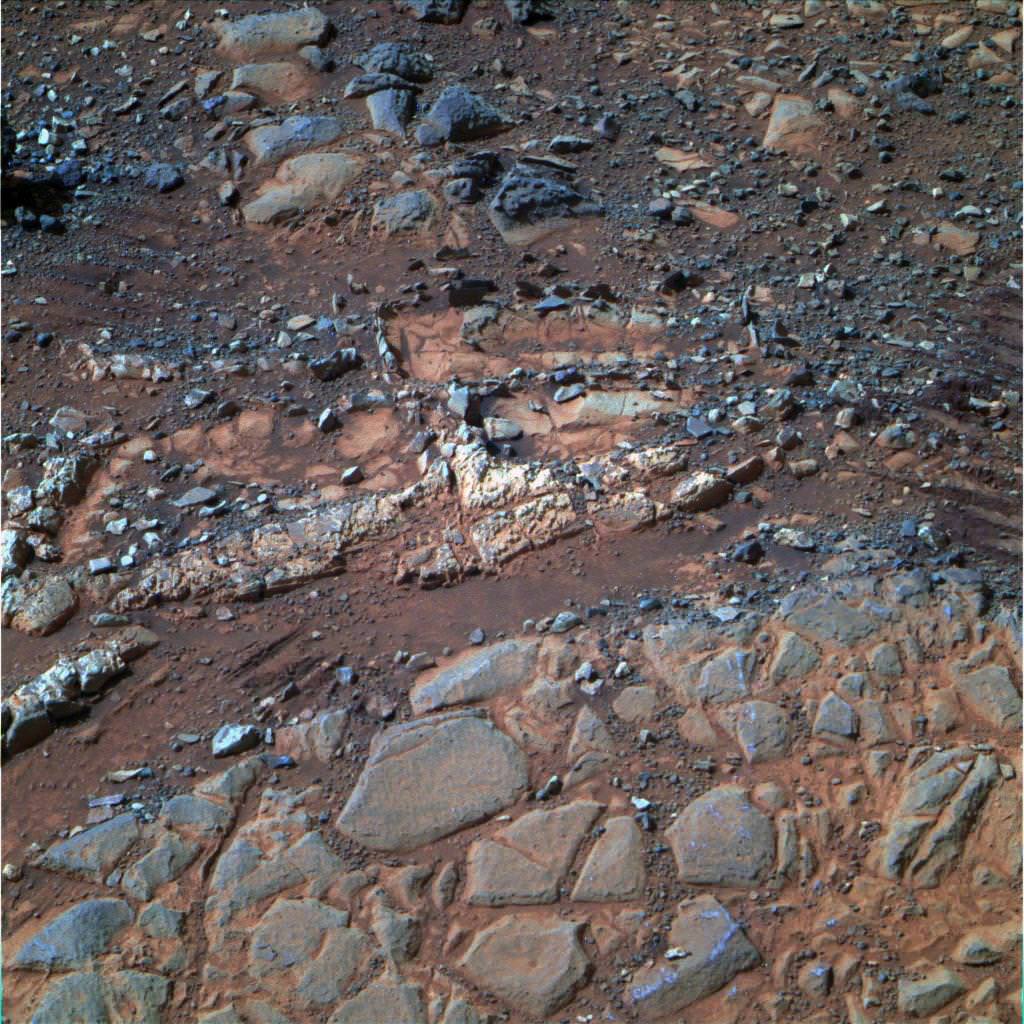
In February 2013, Curiosity conducted the historic first ever interplanetary drilling into Red Planet rocks at the ‘John Klein’ outcrop inside Yellowknife Bay that was shot through with hydrated mineral veins of gypsum.
The Yellowknife Bay basin looks like a dried up river bed.
Analysis of pulverized portions of the gray colored rocky powder cored from the interior of ‘John Klein’ revealed evidence for phyllosilicates clay minerals that typically form in pH neutral water. These starting findings on the crater floor were unexpected and revealed habitable environmental conditions on Mars – thus fulfilling the primary science goal of the mission.
See herein our context panoramic mosaic from Sol 169 showing the robotic arm touching and investigating the Martian soil and rocks at ‘John Klein’.
And if you take a visit to Washington, DC, you can see our panorama (assembled by Ken Kremer and Marco Di Lorenzo) on permanent display at a newly installed Solar System exhibit at the US National Mall in front of the Smithsonian National Air & Space Museum- details here.

“We have found a habitable environment [at John Klein] which is so benign and supportive of life that probably if this water was around, and you had been on the planet, you would have been able to drink it,” says Grotzinger, summing up the mission.

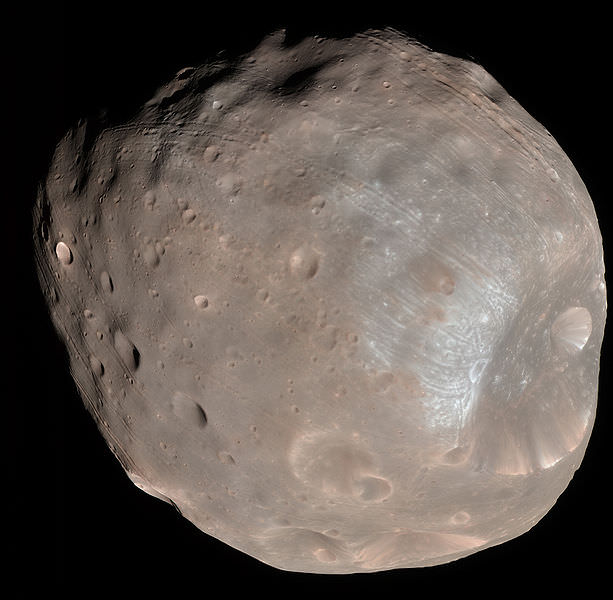
This past week she captured rare sky watching images of the diminutive Martian moons – Phobos and Deimos – together!
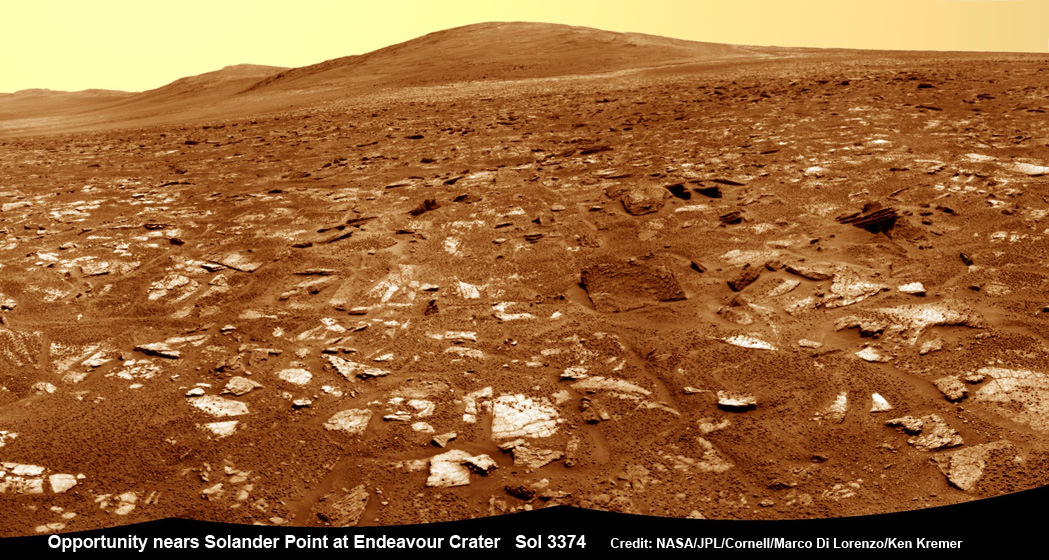
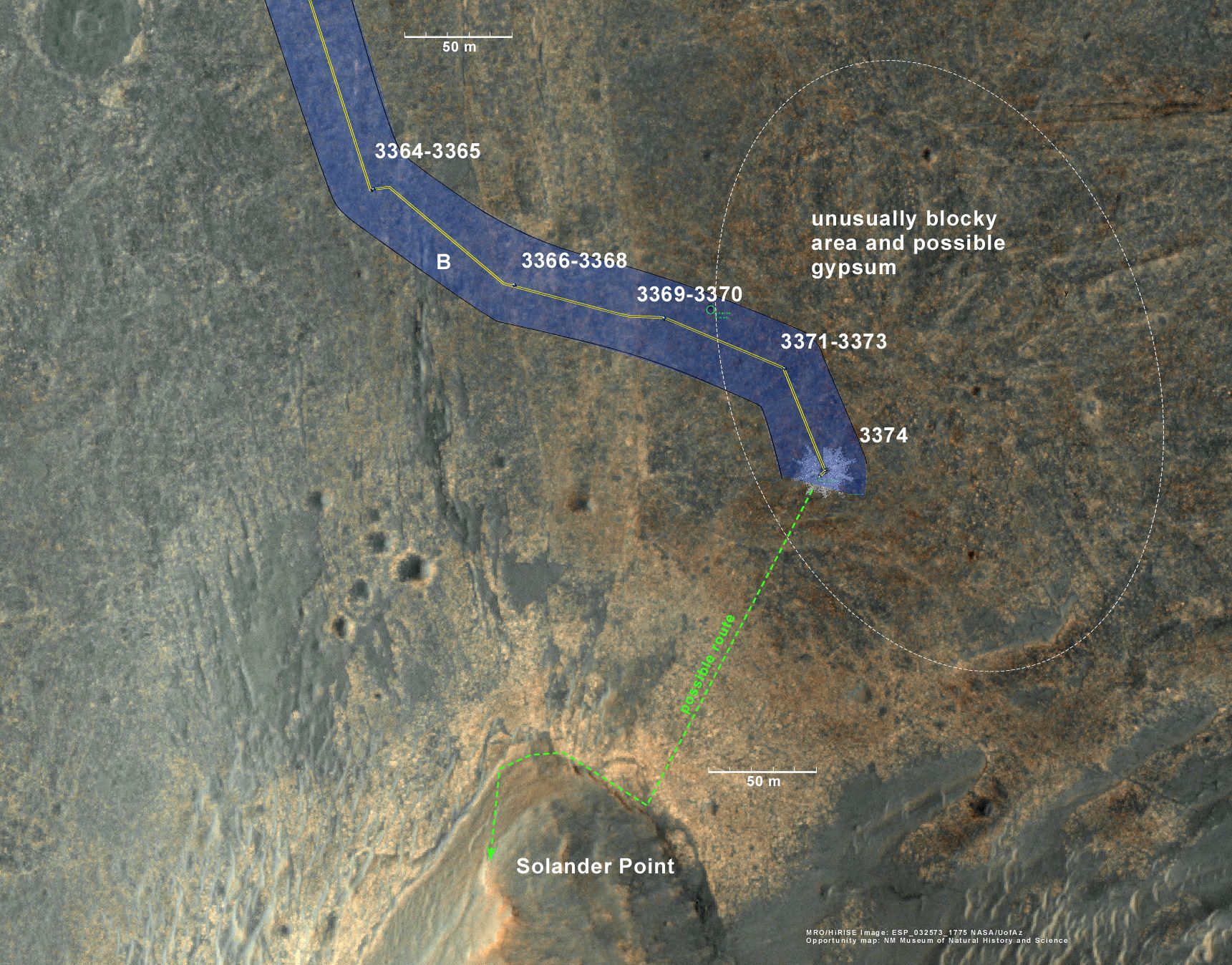
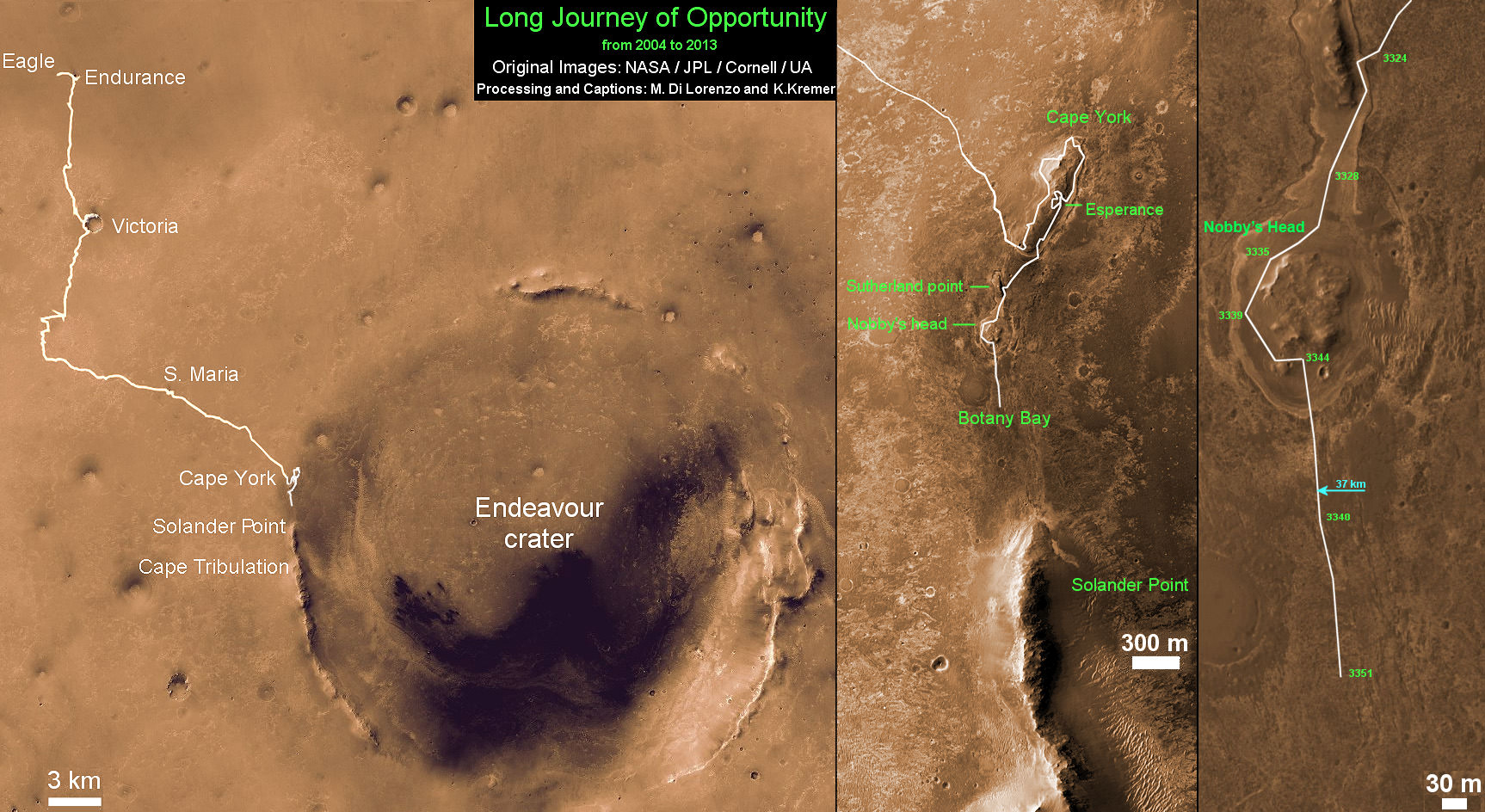
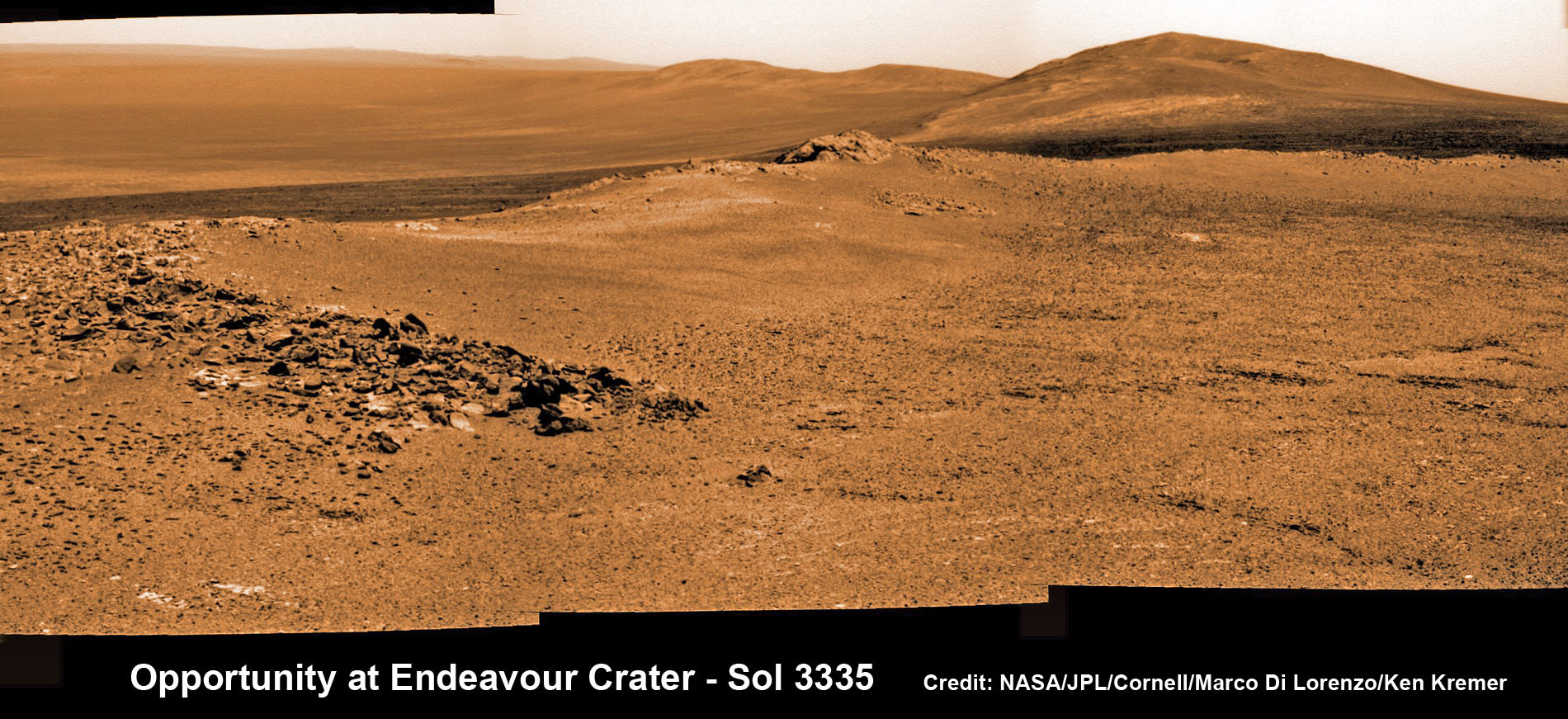
Meanwhile, Curiosity’s 10 year old sister rover Opportunity Is trundling merrily along and will arrive shortly at her own mountain climbing goal on the opposite of Mars.
And NASA’s next Mars orbiter called MAVEN (for Mars Atmosphere and Volatile Evolution), has just arrived intact at the Kennedy Space Center after a cross country trip aboard a USAF C-17.
Technicians at Kennedy will complete final preparations for MAVEN’s blastoff to the Red Planet on Nov. 18 from the Florida Space Coast atop an Atlas V rocket.
On Tuesday, Aug 6, NASA will broadcast a half day of new programming on NASA TV commemorating the landing and discussing the science accomplished so far and what’s coming next.
And stay tuned for more astonishing discoveries during ‘Year 2’ on the Red Planet from our intrepid rover Curiosity – Starting Right Now !
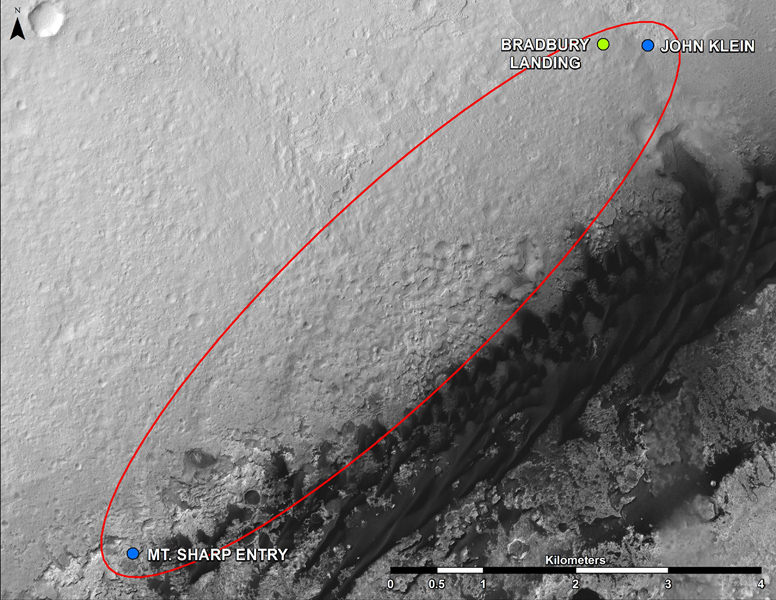
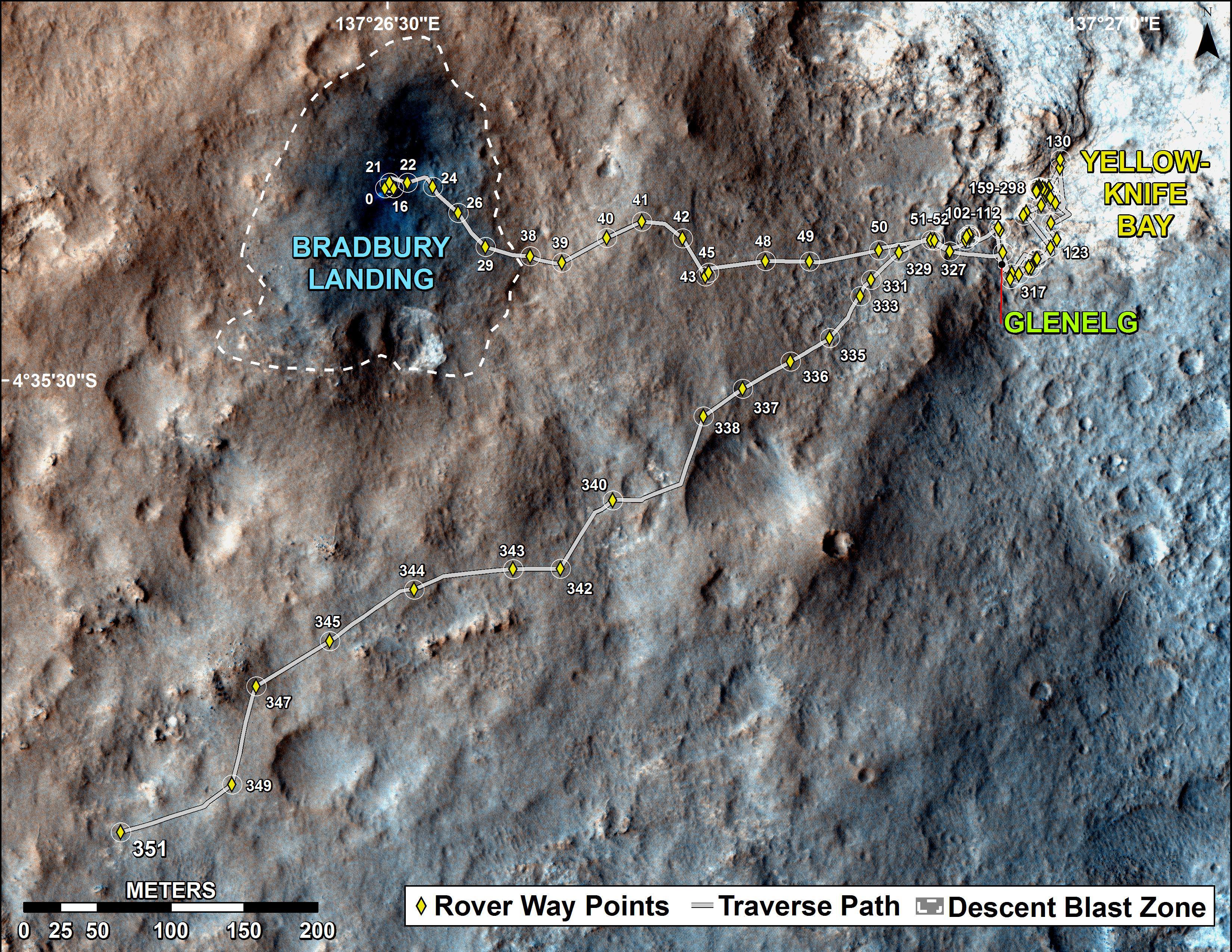
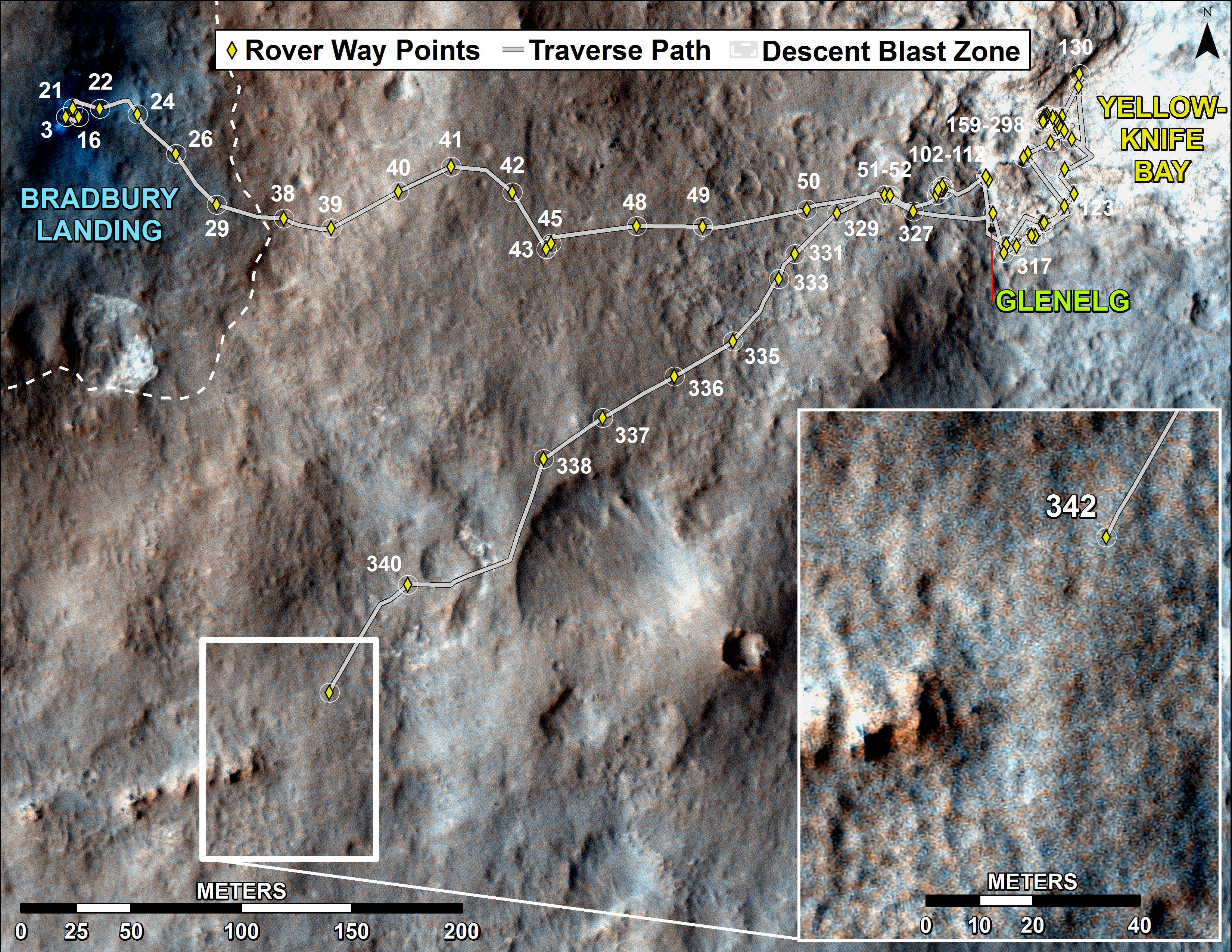
This map shows where NASA’s Mars rover Curiosity landed in August 2012 at “Bradbury Landing”; the area where the rover worked from November 2012 through May 2013 at and near the “John Klein” target rock in the “Glenelg” area; and the mission’s next major destination, the entry point to the base of Mount Sharp. Credit: NASA/JPL-Caltech/Univ. of Arizona

















{kind=link}