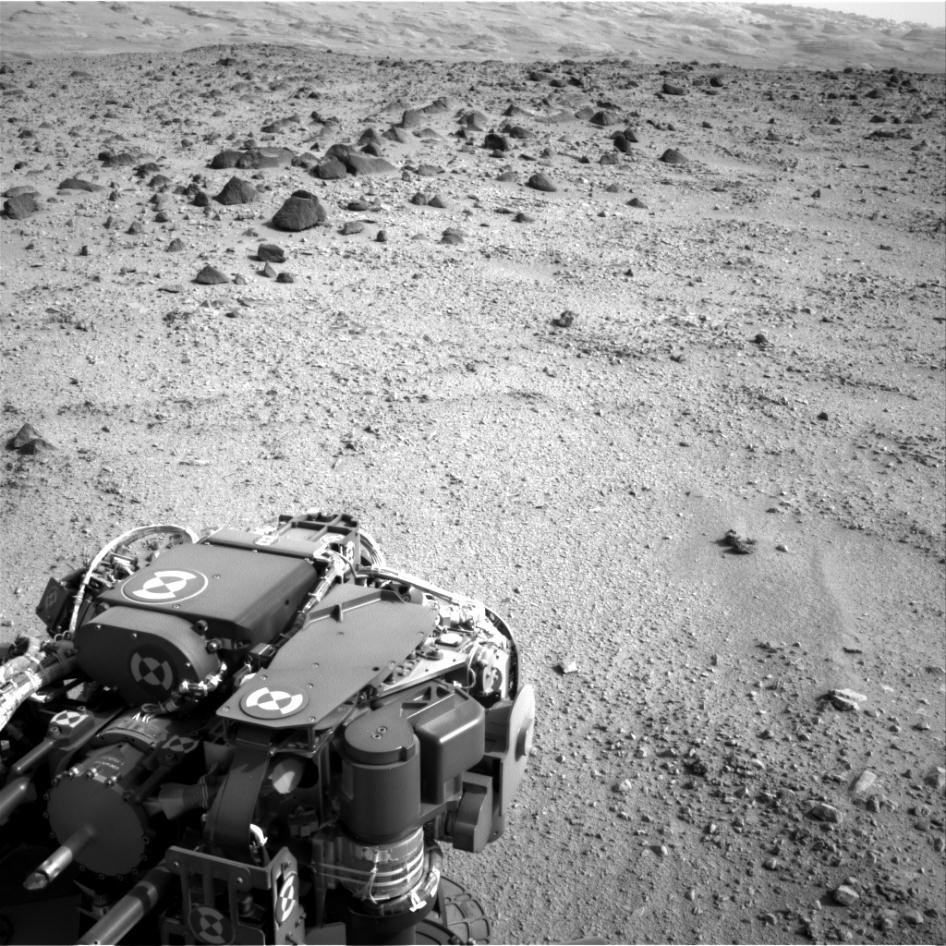
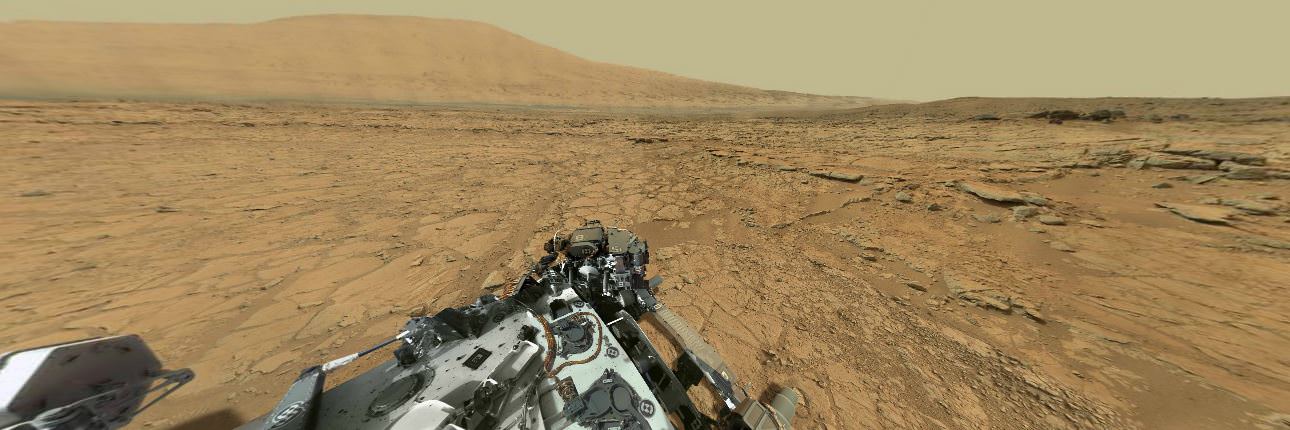
Curiosity Heading for Mount Sharp, Sol 329. Credit: NASA/JPL-Caltech
As the Martian crow flies, the Curiosity rover has about 8 kilometers (5 miles) to trek until it reaches its science destination of the foothills of Mount Sharp. But there will likely be twists and turns along the way. There could be boulders, pits and sand traps to avoid, as well as enticing science targets to stop and study. Just how will the rover be driven all that way? Are rover drivers “hand-driving” every turn or will Curiosity use its autonomous driving software? A combination of both, says Jeff Biesiadecki, MSL Rover Planner and flight software developer. In the Rover Update video below, he explains how each day’s drive will be planned and executed. The rover team is hoping to make at least 100 meters every day.
The image above shows the lower slopes of Mount Sharp at the end of a drive of about 135 feet (41 meters) during the 329th Martian day, or sol, of the rover’s work on Mars (July 9, 2013). That was the third drive by Curiosity since finishing observations at the mission’s final science target in the “Glenelg” area east of the rover’s landing site. Curiosity is driving to the southwest as it heads to Mt. Sharp.
How long will the drive to Mt. Sharp (Aeolis Mons) take? The MSL team expects it will take nine months to a year with stops for science.
“The mission is discovery driven,” said John Grotznger, who leads the MSL mission. “We will go to where the science takes us.”
Opportunity rover’s view across Botany Bay to Solander Point - her next destination - as NASA celebrates 10 Years since blastoff for Mars on July 7, 2003. The rover will climb up Solander Point because it which may harbor clay minerals indicative of a past Martian habitable environment. This pancam mosaic was assembled from raw images taken on Sol 3348 (June 24, 2013. Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer (kenkremer.com)
Opportunity rover’s view across Botany Bay to Solander Point – her next destination – as NASA celebrates 10 Years since blastoff for Mars on July 7, 2003. The rover will climb up Solander Point because it which may harbor clay minerals indicative of a past Martian habitable environment. This pancam mosaic was assembled from raw images taken on Sol 3348 (June 24, 2013.
Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer (kenkremer.com)[/caption]
Today, NASA’sOpportunity rover marks a magical moment celebrating 10 years since launching to Mars on July 7, 2003 and with her impending Mountain destination filling the camera’s eye view.
The now legendary robot has vastly exceeded everyone’s expectations. Back in 2003 the science team promised us a mere 90 day ‘warranty’ following the suspenseful airbag landing on Jan. 24, 2004 at Meridiani Planum.
Today is Martian Day (or Sol) 3360. That amounts to a life expectancy and exploration ‘bonus’ of more than 37 times beyond the design lifetime.
Launch of NASA’s 2nd Mars Exploration Rover, Opportunity, aboard a Delta II Heavy rocket to Mars on July 7, 2003 at 11:18 p.m. EDT from Pad 17-B at Cape Canaveral Air Force Station, Fla. Credit: NASA
Opportunity’s twin sister Spirit blasted off three weeks earlier in June 2003 and continued functioning until 2010.
“I never thought we’d achieve nine months!” Principal Investigator Prof. Steve Squyres of Cornell University told me recently on the occasion of the rovers 9th anniversary on Mars in January 2013.
As you read this, the now decade old rover Opportunity is blazing a trail toward’s the oldest geological deposits she has ever explored – at a place called Solander Point, a raised ridge along the eroded rim of huge Endeavour Crater.
Opportunity has surpassed the halfway point in the traverse from the rim segment she has explored the past 22 months at ‘Cape York’ to her next rim segment destination at Solander.
From tip to tip, Cape York and Solander Point lie 1.2-mile (2-kilometer) apart along the western rim of Endeavour Crater. Both are raised portions of 14-mile-wide (22-kilometer-wide) Endeavour.
The rover has less than half a mile (800 meters) to go to finish the Martian dash from one rim segment to the next across an area called ‘Botany Bay’.
This view from July 2, 2013 (Sol 3355) shows the terrain that NASA’s Mars Exploration Rover Opportunity is crossing in a flat area called “Botany Bay” on the way toward “Solander Point,” which is visible on the horizon. Credit: NASA/JPL-Caltech
“We are making very good progress crossing ‘Botany Bay,’ said John Callas of NASA’s Jet Propulsion Laboratory, Pasadena, Calif., who is project manager for the mission now entering its 2nd decade.
The flat terrain of fractured, light-toned bedrock is devoid of treacherous dunes and is easy to drive across, almost like a highway, which simplifies the daily planning by the rovers Earthly handlers.
“The surface that Opportunity is driving across in Botany Bay is polygonally fractured outcrop that is remarkably good for driving,” said Brad Joliff, an Opportunity science team member and long-term planner at Washington University in St. Louis. “The plates of outcrop, like a tiled mosaic pavement, have a thin covering of soil, not enough to form the wind-blown ripples we’ve had to deal with during some other long treks. The outcrop plates are light-toned, and the cracks between them are filled with dark, basaltic soil and our old friends the ‘blueberries.”
The “blueberries” are hematite-rich, erosion-resistant concretions about the size of BB’s that Opportunity discovered when she first opened her eyes at her Eagle crater landing site. During the multi year crater hopping tour that ensued, the rover continued finding patches of blueberries all the way to Endeavour crater.
1st color panorama taken by Opportunity after landing inside Eagle Crater on Jan. 24, 2004. Credit: NASA/JPL/Cornell
Opportunity is expected to arrive at Solander’s foothills sometime in August – before the onset of the next southern hemisphere Martian winter, her 6th altogether.
Opportunity will scale Solander to continue the science quest in search of additional evidence of habitable environments with the chemical ingredients necessary to sustain Martian microbial life.
“Right now the rover team is discussing the best way to approach and drive up Solander,” Ray Arvidson told Universe Today. Arvidson is the mission’s deputy principal scientific investigator from Washington University in St. Louis, Mo.
‘Solander Point’ offers roughly about a 10 times taller stack of geological layering compared to ‘Cape York.’
Solander also offers north facing slopes where Opportunity’s solar wings can more effectively soak up the sun’s rays to generate life giving electrical power.
The robot remains in excellent health.
The total driving distance exceeds 23 miles (37 kilometers). She has snapped over 181,000 images.
Meanwhile on the opposite side of Mars at Gale Crater, Opportunity’s younger sister rover Curiosity also discovered a habitable environment originating from a time when the Red Planet was far warmer and wetter billions of years ago.
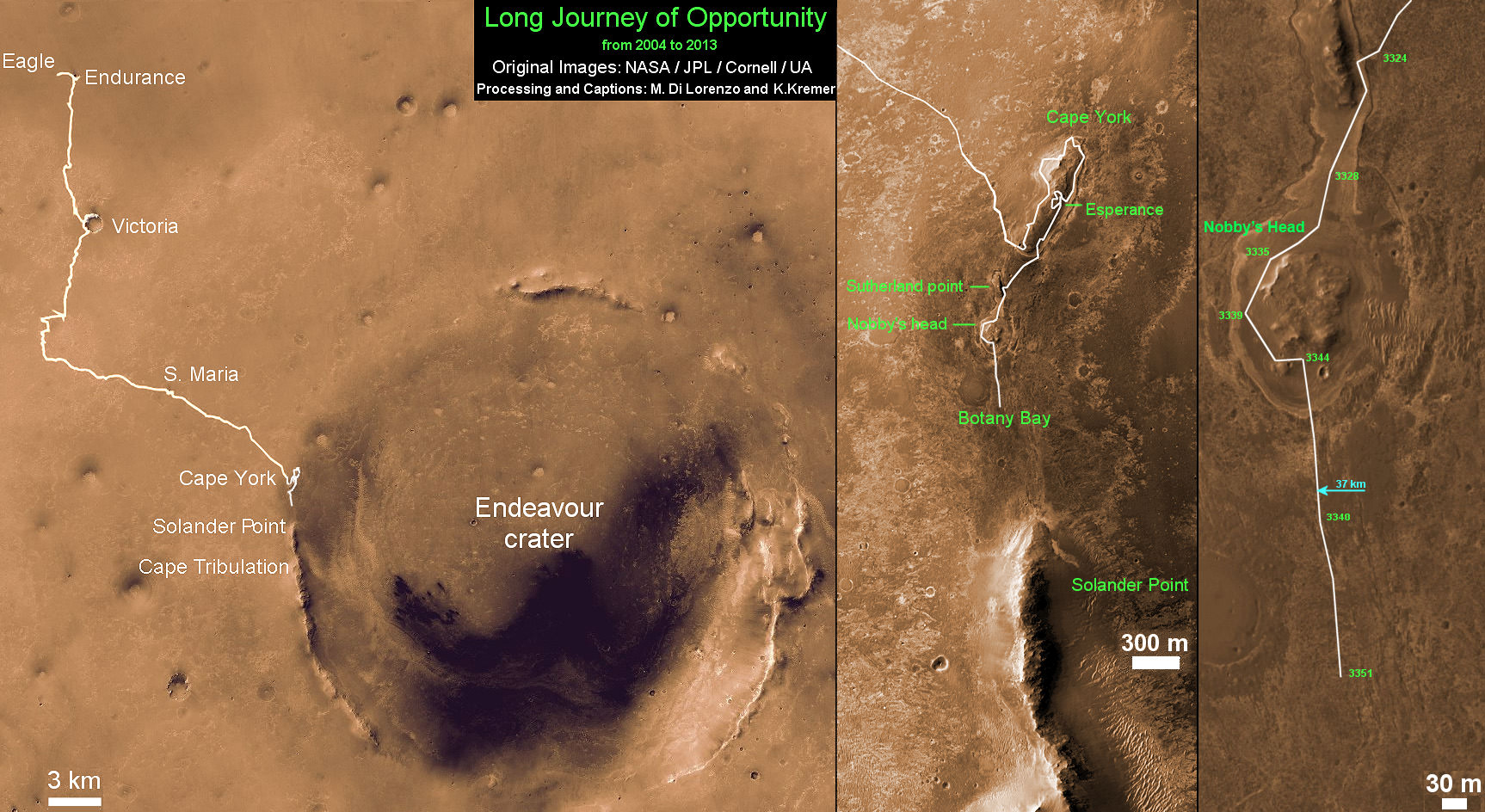
Opportunity captures spectacular panoramic view ahead to her upcoming mountain climbing goal, the raised rim of “Solander Point” at right, located along the western edge of Endeavour Crater. It may harbor clay minerals indicative of a habitable zone. The rise at left is “Nobbys Head” which the rover just passed on its southward drive to Solander Point from Cape York. This pancam photo mosaic was taken on Sol 3335, June 11, 2013 shows vast expanse of the central crater mound and distant Endeavour crater rim. Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer (kenkremer.com) Traverse Map for NASA’s Opportunity rover from 2004 to 2013
This map shows the entire path the rover has driven during more than 9 years and over 3360 Sols, or Martian days, since landing inside Eagle Crater on Jan 24, 2004 to current location heading south to Solander Point from Cape York ridge at the western rim of Endeavour Crater. Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer
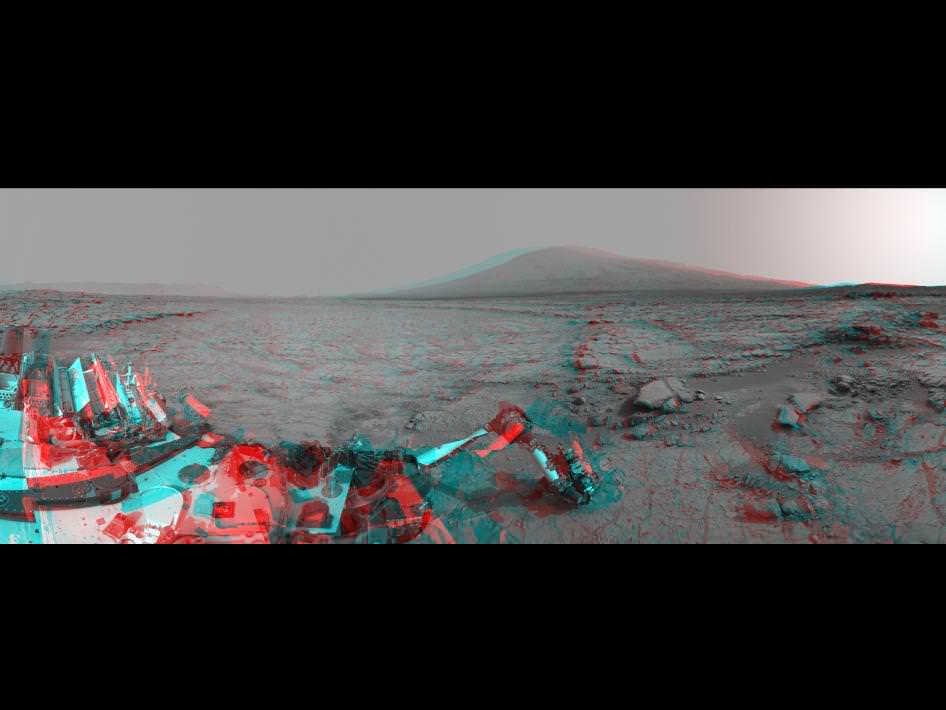
Mars Stereo View from 'John Klein' to Mount Sharp. Credit: NASA/JPL-Caltech.
Above is a recent 3-D version of a panoramic view from NASA of the Curiosity Mars rover, made from dozens of images from both the left and right Navcams. But panoramic specialist John O’Connor has also put together a non-3-D interactive view of this scene of the rover and its surroundings. The images were taken during the 166th, 168th and 169th Martian days, or sols, of Curiosity’s work on Mars, which equates to Jan. 23, 25 and 26, 2013 here on Earth.
Check out the interactive panorama here, or below. It will probably come up as full-screen, and you can use your mouse to interact and move around. Or just hit ‘escape’ if you’d rather not be in full-screen mode. You can still use the mouse to move around wherever you want to go, or use the toolbar on the lower left for more options. This is a high-def view so feel free to zoom in for details!
Click on this image to get to the interactive panorama on NASAtech. Via John O’Connor.
We haven’t heard much from Curiosity lately because Mars is still in solar conjunction, where Mars and Earth are on opposite sides of the Sun from each other, meaning communications are basically worthless between the two planets. Our powerful Sun interrupts radio transmissions between Earth and the Mars rovers and orbiters, and data to and from the spacecraft might get corrupted. So, to avoid any problems, the spacecraft (and spacecraft engineers and scientists) take a little time off; the solar conjunction serves as a little spring break. But things should be back at full-throttle by next week.
For the 3-D view above (click on it to see a larger view), use red-blue glasses with the red lens on the left. It spans 360 degrees, with Mount Sharp on the southern horizon.
In the center foreground, the rover’s arm holds the tool turret above a target called “Wernecke” on the “John Klein” patch of pale-veined mudstone. On Sol 169, Curiosity used its dust-removing brush and Mars Hand Lens Imager (MAHLI) on Wernecke. About two weeks later, Curiosity used its drill at a point about 1 foot (30 centimeters) to the right of Wernecke to collect the first drilled sample from the interior of a rock on Mars.
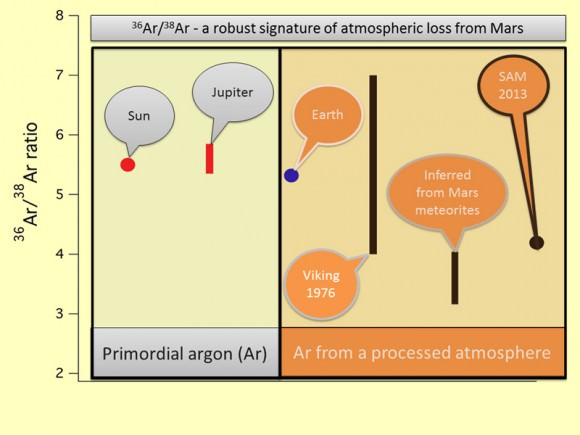
The argon isotope fractionation provides clear evidence of the loss of atmosphere from Mars. (NASA/JPL)
In this latest video update from the Mars Science Laboratory team, Ashwin Vasavada, the mission’s Deputy Project Scientist, discusses the recent finding that the Red Planet doesn’t have the same atmosphere it used to. Curiosity’s microwave oven-sized Sample Analysis at Mars (SAM) instrument analyzed an atmosphere sample and the results provided the most precise measurements ever made of isotopes of argon in the Martian atmosphere.
This sequence of seven images from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter shows wind-caused changes in the parachute of NASA's Mars Science Laboratory spacecraft as the chute lay on the Martian ground during months after its use in safe landing of the Curiosity rover. Image credit: NASA/JPL-Caltech/Univ. of Arizona.
How cool is this? An animation of seven images from the HiRISE camera on the Mars Reconnaissance Orbiter show a “flapping” of the parachute that allowed the Curiosity rover to descend safely through Mars atmosphere images. The chute, imaged as it lay on the ground following the rover’s safe landing, was blown about by the Martian breeze! The images were acquired by HiRISE between August 12, 2012 and January 13, 2013. The different images show distinct changes in the parachute, which is attached to the backshell that encompassed the rover during launch, flight and descent.
The HiRISE team explains the animation:
In the first four images there are only subtle changes, perhaps explained by differences in viewing and illumination geometry.
Sometime between September 8, 2012 and November 30, 2012, there was a major change in which the parachute extension to the southeast (lower right) was moved inward, so the parachute covers a smaller area. In the same time interval some of the dark ejecta around the backshell brightened, perhaps from deposition of airborne dust.
Another change happened between December 16, 2012 and January 13, 2013, when the parachute shifted a bit to the southeast. This type of motion may kick off dust and keep parachutes on the surface bright, to help explain why the parachute from Viking 1 (landed in 1976) remains detectable.
The Mars Science Laboratory’s parachute flaps in the wind on Mars. Images by the HiRISE camera on the Mars Reconnaissance Orbiter, animation by Doug Ellison.
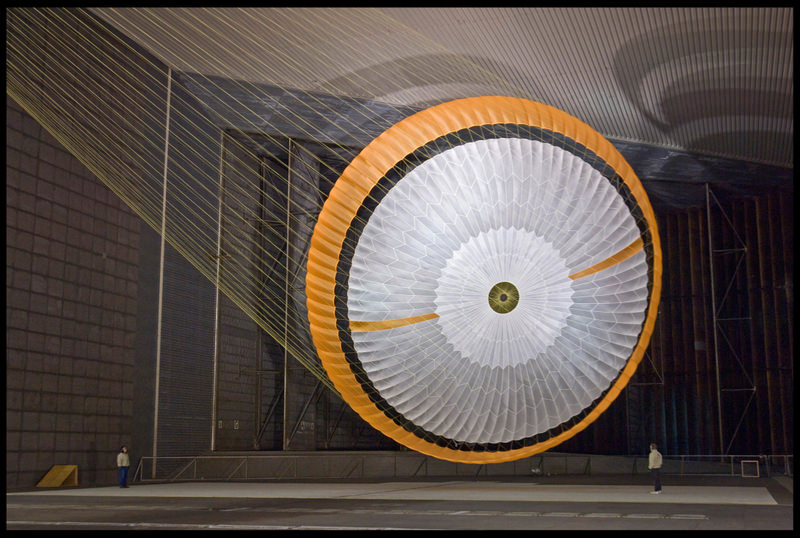
And here’s a look at how big the chute really is (note the people for scale):
MSL parachutte tested in a wind tunnel. Credit: JPL.
Photographer and panoramacist Andrew Bodrov has again taken advantage of that old shutterbug, the Curiosity rover, and the images she’s taken of her surroundings. This huge new interactive panorama stretches across 90,000 x 45,000 pixels, and includes 295 images from the Narrow Angle Camera taken on Sols 136-149 and 112 images from Medium Angle Camera taken on Sol 137. Enjoy playing around and visiting Curiosity’s ‘hood. If you click the link below the pan, it will take you to the host website where the panorama spreads across your screen. Enjoy!
FYI, today is Sol 228 for Curiosity on Mars. Has it been that long already?
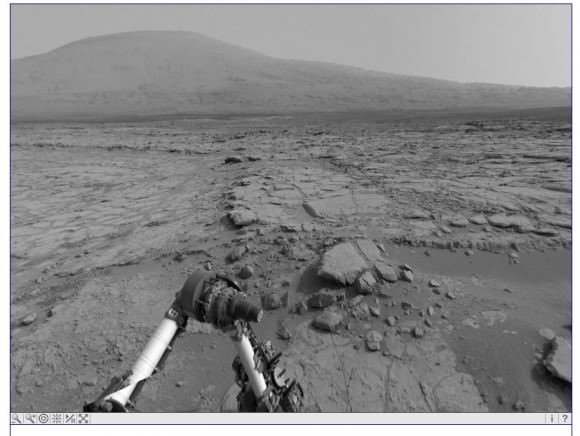
Curiosity accomplished Historic 1st drilling into Martian rock at John Klein outcrop on Feb 8, 2013 (Sol 182), shown in this context mosaic view of the Yellowknife Bay basin taken on Jan. 26 (Sol 169). The robotic arm is pressing down on the surface at John Klein outcrop of veined hydrated minerals - dramatically back dropped with her ultimate destination; Mount Sharp. Credit: NASA/JPL-Caltech/Ken Kremer/Marco Di Lorenzo
This short 60-second video explains organic molecules and what they can tell us about the history of Mars. It’s also a good segue to provide an update on how the Curiosity rover is doing following the computer problems we reported earlier this week.
Word is that the rover will resume its activities tonight. This is later than originally planned, as shortly after being recovered from safe mode back into active status following a memory issue with one of its on-board computers, engineers put Curiosity into sleep mode because of a rather large solar flare that was heading to Mars.
“Storm’s a-comin’!” the rover’s Twitter account announced. “There’s a solar storm heading for Mars. I’m going back to sleep to weather it out.”
But the CME has now passed and all appears to be well with the rover. Look for raw images to resume soon!
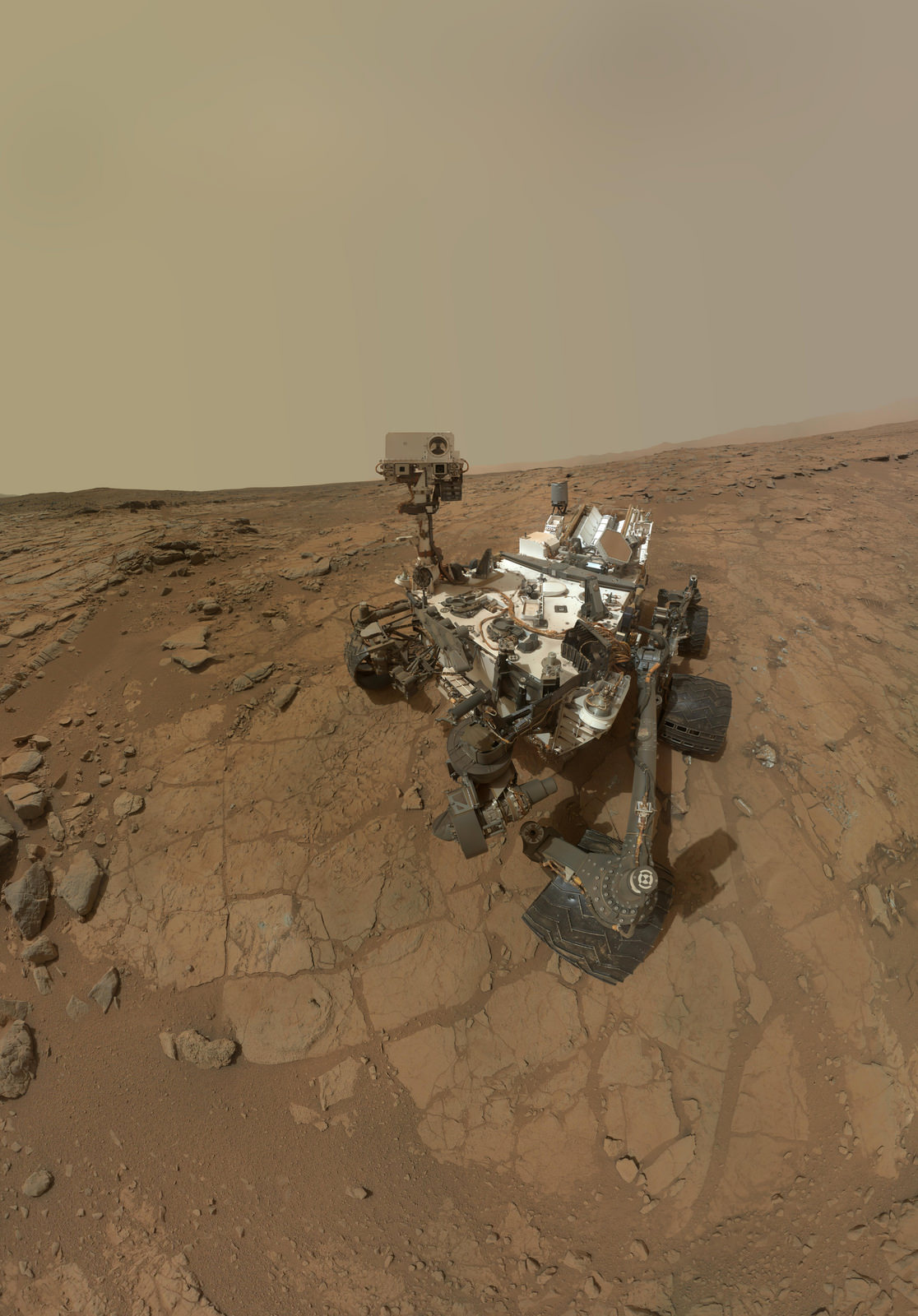
This self-portrait of NASA's Mars rover Curiosity combines 66 exposures taken by the rover's Mars Hand Lens Imager (MAHLI) during the 177th Martian day, or sol, of Curiosity's work on Mars (Feb. 3, 2013). Image credit: NASA/JPL-Caltech/MSSS
The Curiosity rover is now out of “safe mode” following a memory problem with its main computer, and the Mars Science Laboratory team expects the rover to resume full operations next week. Controllers switched the rover to a redundant onboard computer, the rover’s “B-side” computer, on Feb. 28 when the “A-side” computer that the rover had been using demonstrated symptoms of a corrupted memory location. The intentional computer swap put the rover, as anticipated, into minimal-activity safe mode.
“We are making good progress in the recovery,” said MSL Project Manager Richard Cook. “One path of progress is evaluating the A-side with intent to recover it as a backup. Also, we need to go through a series of steps with the B-side, such as informing the computer about the state of the rover — the position of the arm, the position of the mast, that kind of information.”
This is the first glitch of any kind the Curiosity rover has suffered since landing in August, 2012. NASA has indicated this is not a serious problem (as Emily Lakdawalla of the Planetary Society put it “not life-threatening, just really inconvenient.) It will just take time to make sure the computer switch-over is done correctly.
NASA says the cause for the A-side’s memory symptoms observed last week remains to be determined, but the most likely cause was that the computer memory was corrupted by a cosmic ray hit. These are subatomic particles traveling through space at extraordinary speeds. The origin of cosmic rays was recently determined to be distant supernovae.
Meanwhile, the rover has not done any surface operations or uploaded any new images to Earth since Sol 200, so for those of you going through withdrawal from not seeing any new raw images from Curiosity, we’ll keep you posted of when the flow of images resumes.
Curiosity Rover's Self Portrait at 'John Klein' Drilling Site, which combines dozens of exposures taken by the rover's Mars Hand Lens Imager (MAHLI) during the 177th Martian day, or sol, of Curiosity's work on Mars (Feb. 3, 2013). Credit: NASA/JPL-Caltech/MSSS
A problem with the memory on the Curiosity rover’s main computer has caused engineers to switch the rover over to a redundant onboard computer. This caused the rover to go into “safe mode,” which was anticipated in the computer switch. And so now over the next few days, the team will be shifting the rover from safe mode to operational status. They are also troubleshooting the condition that affected operations yesterday.
The @MarsCuriosity Twitter feed posted: “Don’t flip out: I just flipped over to my B-side computer while the team looks into an A-side memory issue.”
JPL said the condition is related to a glitch in flash memory linked to the other, now-inactive, computer in response to a memory issue on the computer that had been active.
The intentional swap occurred at about 2:30 a.m. PST on Thursday, Feb. 28.
“We switched computers to get to a standard state from which to begin restoring routine operations,” said Richard Cook. .
Like many spacecraft, Curiosity carries a pair of redundant main computers in order to have a backup available if one fails. Each of the computers, A-side and B-side, also has other redundant subsystems linked to just that computer. Curiosity is now operating on its B-side, as it did during part of the flight from Earth to Mars. It operated on its A-side from before the August 2012 landing through Wednesday.
“While we are resuming operations on the B-side, we are also working to determine the best way to restore the A-side as a viable backup,” said JPL engineer Magdy Bareh, leader of the mission’s anomaly resolution team.
The spacecraft remained in communications at all scheduled communication windows on Wednesday, but it did not send recorded data, only current status information. The status information revealed that the computer had not switched to the usual daily “sleep” mode when planned. Diagnostic work in a testing simulation at JPL indicates the situation involved corrupted memory at an A-side memory location used for addressing memory files.
Scientific investigations by the rover were suspended Wednesday and today. Resumption of science investigations is anticipated within several days. This week, laboratory instruments inside the rover have been analyzing portions of the first sample of rock powder ever collected from the interior of a rock on Mars.
Curiosity Rover's Self Portrait at 'John Klein' Drilling Site, which combines dozens of exposures taken by the rover's Mars Hand Lens Imager (MAHLI) during the 177th Martian day, or sol, of Curiosity's work on Mars (Feb. 3, 2013). Credit: NASA/JPL-Caltech/MSSS
There’s an incredible new interactive panorama from the latest Curiosity rover’s self-portrait and surroundings at the “John Klein” drilling site. It was put together by photographer Andrew Bodrov and combines the recent self-portrait and other images to create a full 360-degree panorama created from hundreds of images. The mosaic stretches about 30,000 pixels width.
The pan includes the self-portrait, which consists of 66 different images (seen above) taken by the rover’s Mars Hand Lens Imager (MAHLI) during the 177th Martian sol, of Curiosity’s work on Mars (Feb. 3, 2013 here on Earth), along with 113 images taken on Sol 170 and an additional 17 images taken on Sol 176.
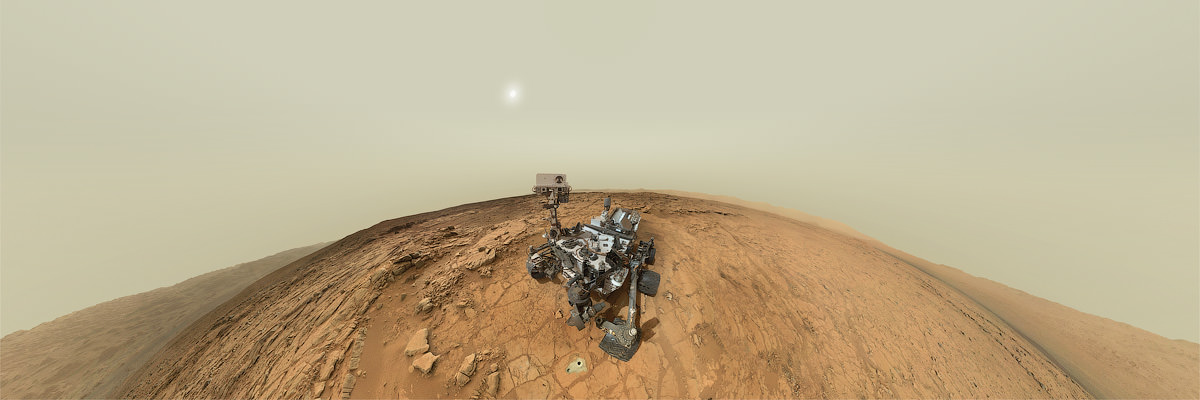
Here’s the full pan in a non-interactive view:
Curiosity panorama. Credit: NASA/JPL/MSSS, image editing by Andrew Bodrov.
In the pan, you can see the holes in the rock named John Klein — in memory of a Mars Science Laboratory deputy project manager who died in 2011. The historic first drilling took place on Feb. 8, 2013, and by zooming around and in, you can also see the weird little shiny protuberance we’ve been talking about (look for the pile of rocks to the right of the rover.)