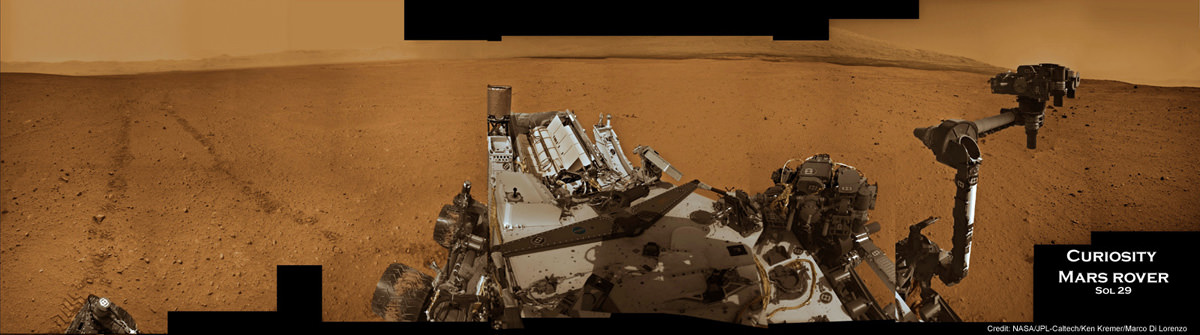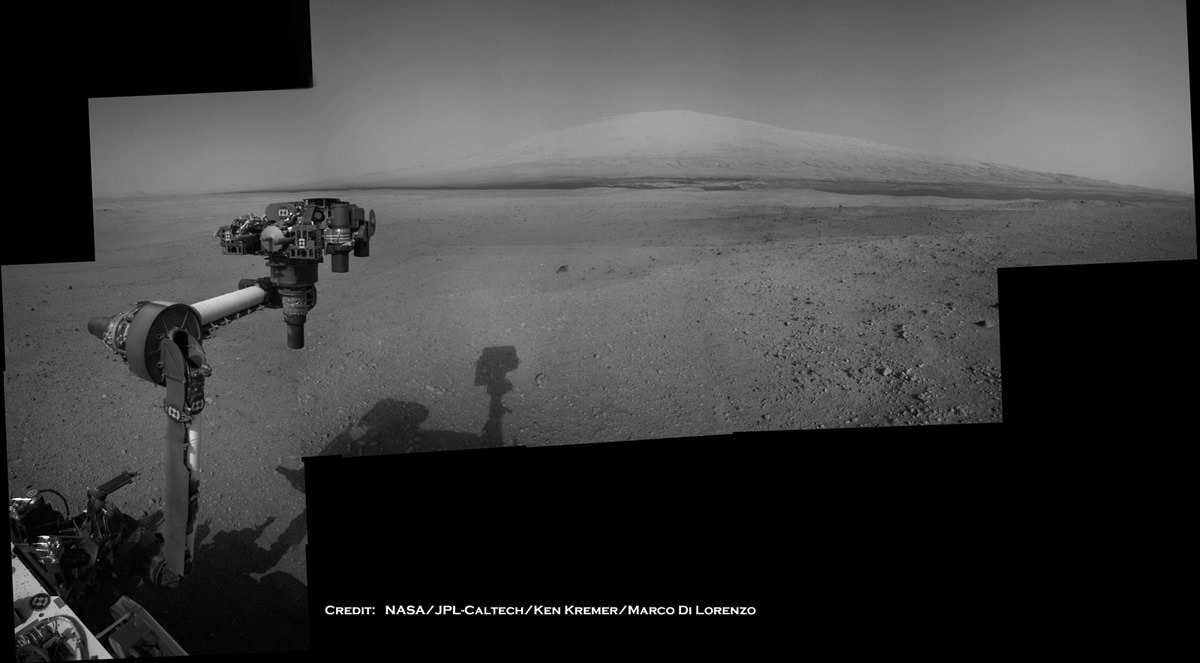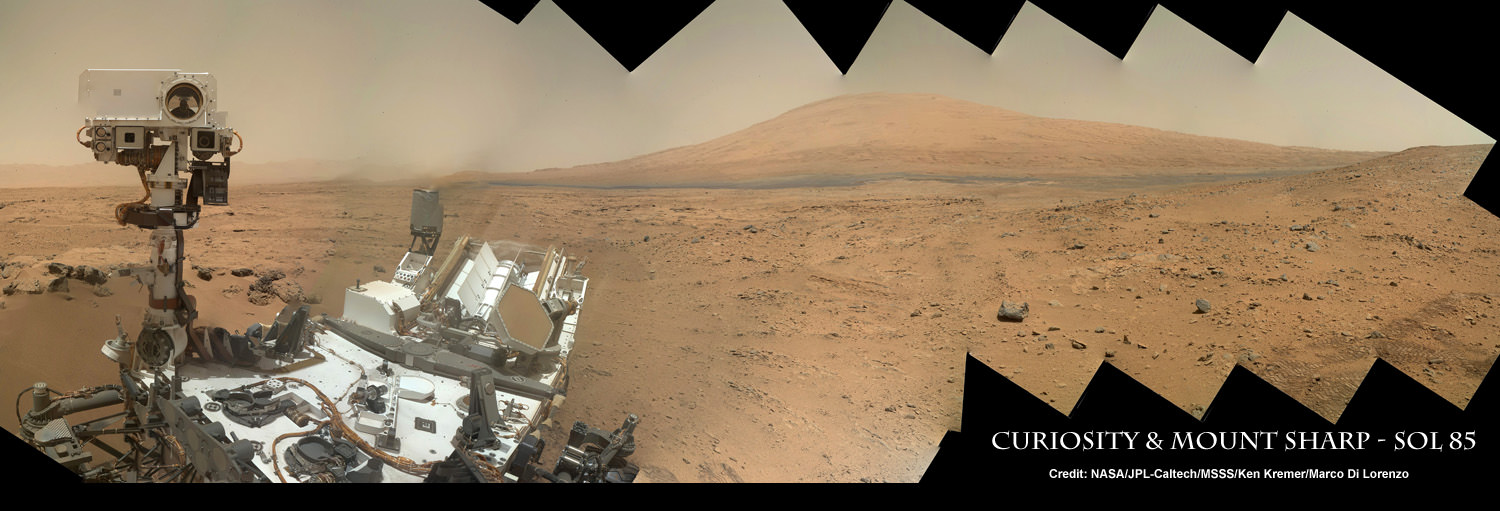
Image Caption: Curiosity Self Portrait with Mount Sharp at Rocknest ripple in Gale Crater. Curiosity used the Mars Hand Lens Imager (MAHLI) camera on the robotic arm to image herself and her target destination Mount Sharp in the background. Mountains in the background to the left are the northern wall of Gale Crater. This color panoramic mosaic was assembled from raw images snapped on Sol 85 (Nov. 1, 2012). Credit: NASA/JPL-Caltech/MSSS/Ken Kremer/Marco Di Lorenzo
NASA’s revolutionary Curiosity rover is celebrating 90 Sols on Mars by snapping amazing self-portraits (see our mosaics above and below) and biting into the Red Planet’s surface to accomplish unprecedented scientific analysis of an alien world.
Nov. 6 marked a major milestone in Curiosity’s daring and evolving mission in search of signs of life. This is the three month anniversary of her toiling on the breathtaking Martian surface since the hair-raising pinpoint touchdown on Aug. 6 inside Gale Crater at the foothills of a humongous and gorgeous layered mountain that likely holds the key to understanding Mars watery past and 4 billion plus year evolution.
The never before seen mosaic vista above shows a matchless self portrait of Curiosity’s Mastcam ‘head’ and body combined with a thrilling scene of her target destination – Mount Sharp – the layered mound of sediments that could unlock the mysteries of whether Mars ever possessed habitats favorable for the evolution of life, past or present.
Last week on Sols 84 & 85 (Oct 31 & Nov 1) Curiosity took hundreds of high resolution color images with the Mars Hand Lens Imager (MAHLI) camera – located at the end of the 7 foot (2.1 m) long robotic arm – thus affording us a breathtaking portrait view of our emissary from Earth to Mars.
Our Sol 85 self-portrait mosaic was stitched together by the imaging team of Ken Kremer and Marco Di Lorenzo. Last week NASA released the first self portrait mosaic of the Sol 84 MAHLI camera imagery that included the left flank of 3 mile (5 km) Mount Sharp.

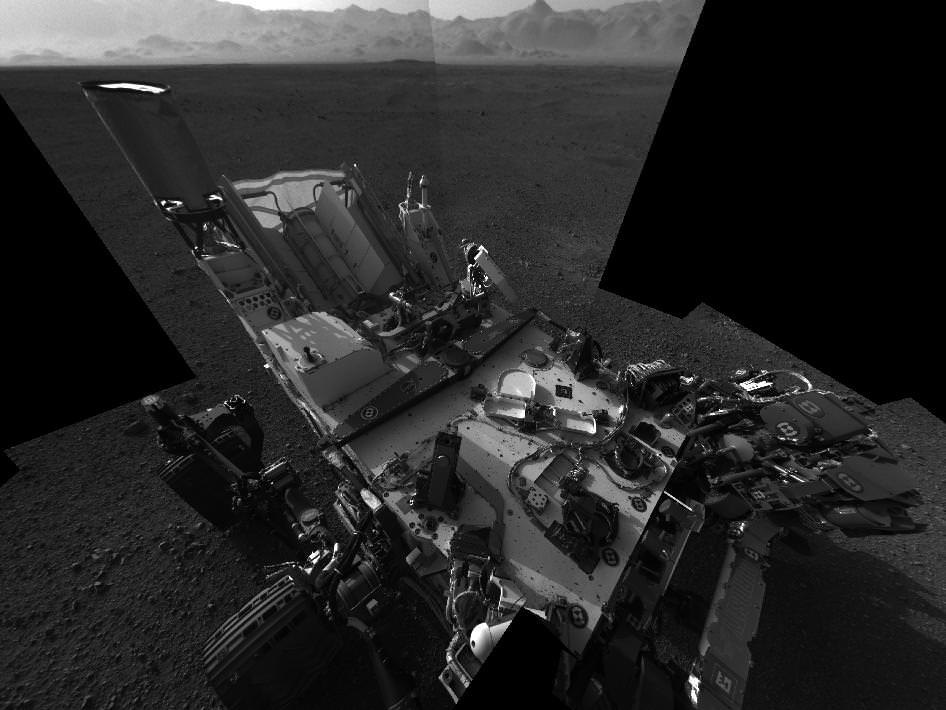
Image Caption: High-Resolution Self-Portrait by Curiosity Rover Arm Camera. On Sol 84 (Oct. 31, 2012), NASA’s Curiosity rover used the Mars Hand Lens Imager (MAHLI) to capture this set of 55 high-resolution images, which were stitched together to create this full-color self-portrait. Credit: NASA/JPL-Caltech/MSSS
The Curiosity team spent considerable effort to build the imaging sequences and then remotely maneuver the robotic arm to precisely collect the raw images and transmit them to Earth.
Previously the team used the MAHLI camera to photograph Curiosity’s underbelly (see our mosaic).

Image Caption: A mosaic of photos taken by the MAHLI camera on Curiosity’s arm shows the underbelly of the rover and its six wheels, with Martian terrain stretching back to the horizon. Credit: NASA/JPL-Caltech/MSSS/Ken Kremer/Marco Di Lorenzo
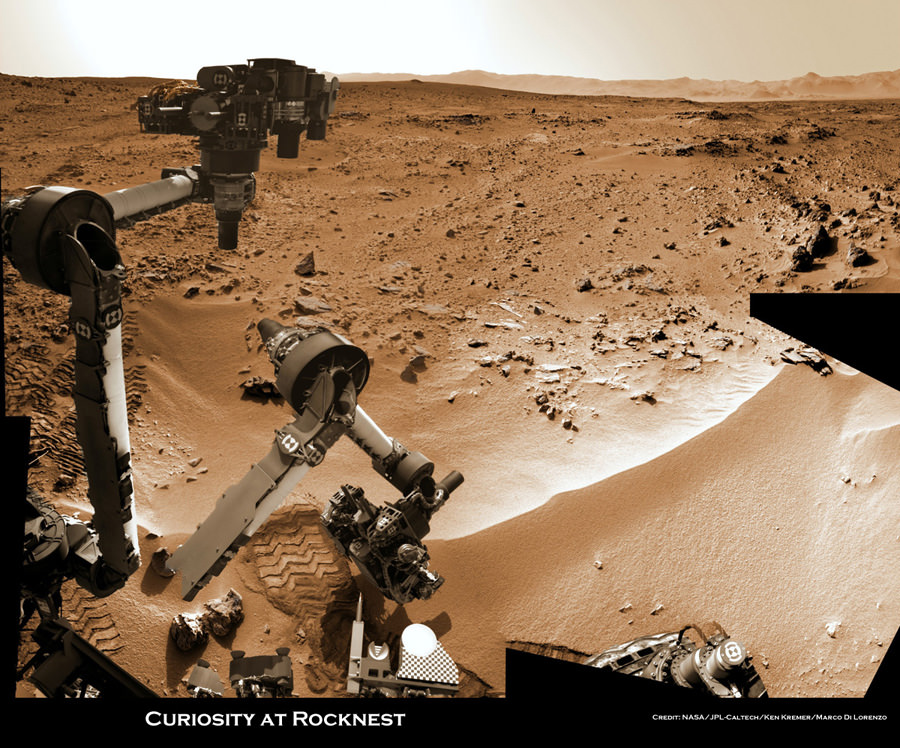
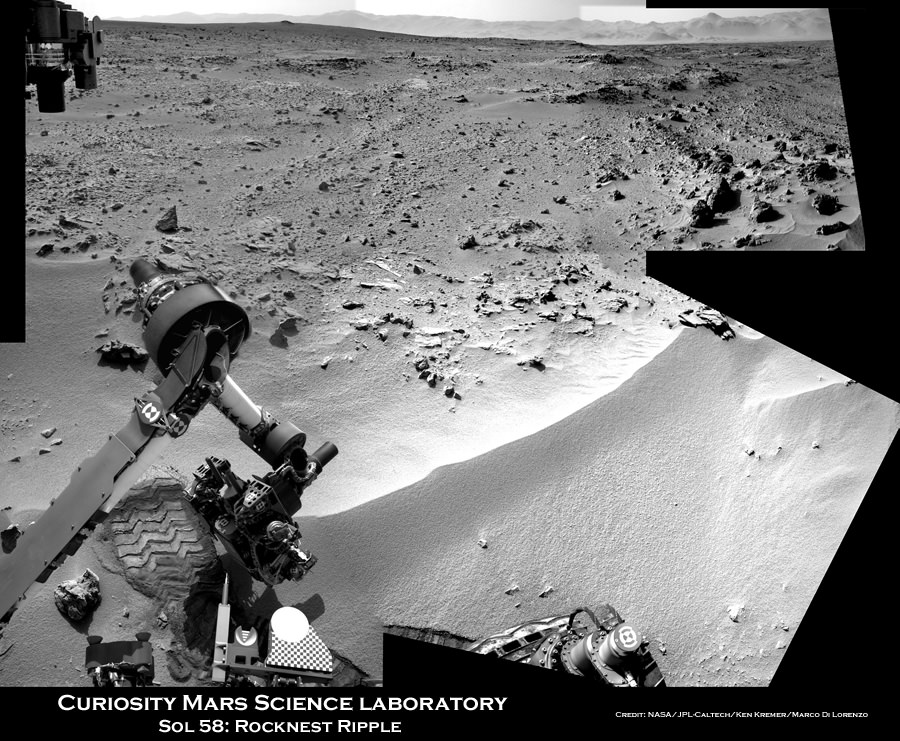
For the past month Curiosity has been hunkered down at “Rocknest” ripple which lies at the edge of “Glenelg” – her first major science destination – and that sits at the natural junction of three types of geologically diverse terrain.
Rocknest afforded the perfect type of fine grained Martian dust to carry out the first test scoops of Martian soil and then used the material to thoroughly cleanse the robots’ sample processing system of residual Earthy contamination and then ingest the first samples into the robots pair of analytical chemistry labs – CheMin and SAM.
Curiosity has eaten into Rocknest 4 times so far and delivered two samples to the CheMin (Chemistry and Mineralogy) instrument for analysis.
Scoop sample #5 should deliver the first solid material to SAM (Sample Analysis at Mars) sometime in the next week or so.
SAM is specifically engineered to search for organic molecules – the building blocks of life as we know it. CheMin uses X-ray diffraction techniques to accurately determine the mineralogical composition of pulverized and sieved red planet soil and rock samples.
Curiosity’s key science finding during the first 90 Sols is the discovery of evidence for an ancient Martian stream bed at three different locations along the short route she has traversed to date.
Curiosity found a trio of outcrops of stones cemented into a layer of conglomerate rock. Hip deep liquid water once flowed vigorously on the floor of Gale Crater billions of years ago. Liquid water is a prerequisite for the origin of life.
Since the landing, some 400 members of the Curiosity science team had been camped out at Mission Control at NASA’s Jet Propulsion Lab in Pasadena, Calif to efficiently coordinate the rovers surface planning and operations.
With the first 90 Sols now successfully behind them and with Curiosity operating in tip top shape, most of the science team has just departed JPL and returned to their home institutions scattered across the globe, mostly in North America and Europe.
The 1 ton SUV sized Curiosity rover has taken over 22,000 pictures thus far and is funded for a 2 year primary mission.
…..
Nov. 16: Free Public Lecture titled “Curiosity and the Search for Life in 3 D” and more by Ken Kremer at Union County College and Amateur Astronomers Inc in Cranford, NJ.
Dec 6: Free Public lecture titled “Atlantis, The Premature End of America’s Shuttle Program and What’s Beyond for NASA” including Curiosity and more at Brookdale Community College/Monmouth Museum and STAR Astronomy club in Lincroft, NJ
See more of our Curiosity Mars mosaics by Ken Kremer & Marco Di Lorenzo at PBS Nova TV (airing Nov 14), NBC News Cosmic log and Scientific American.

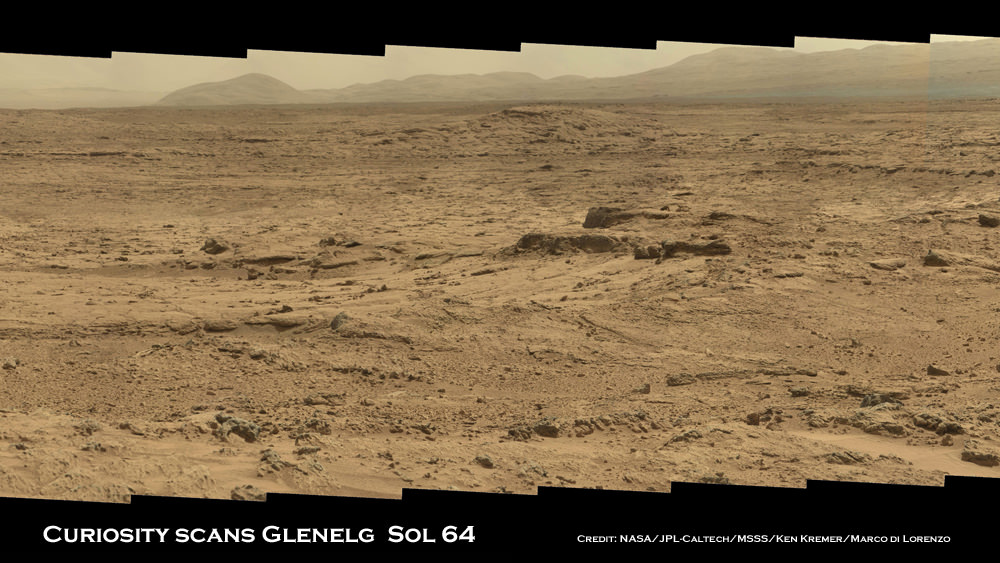
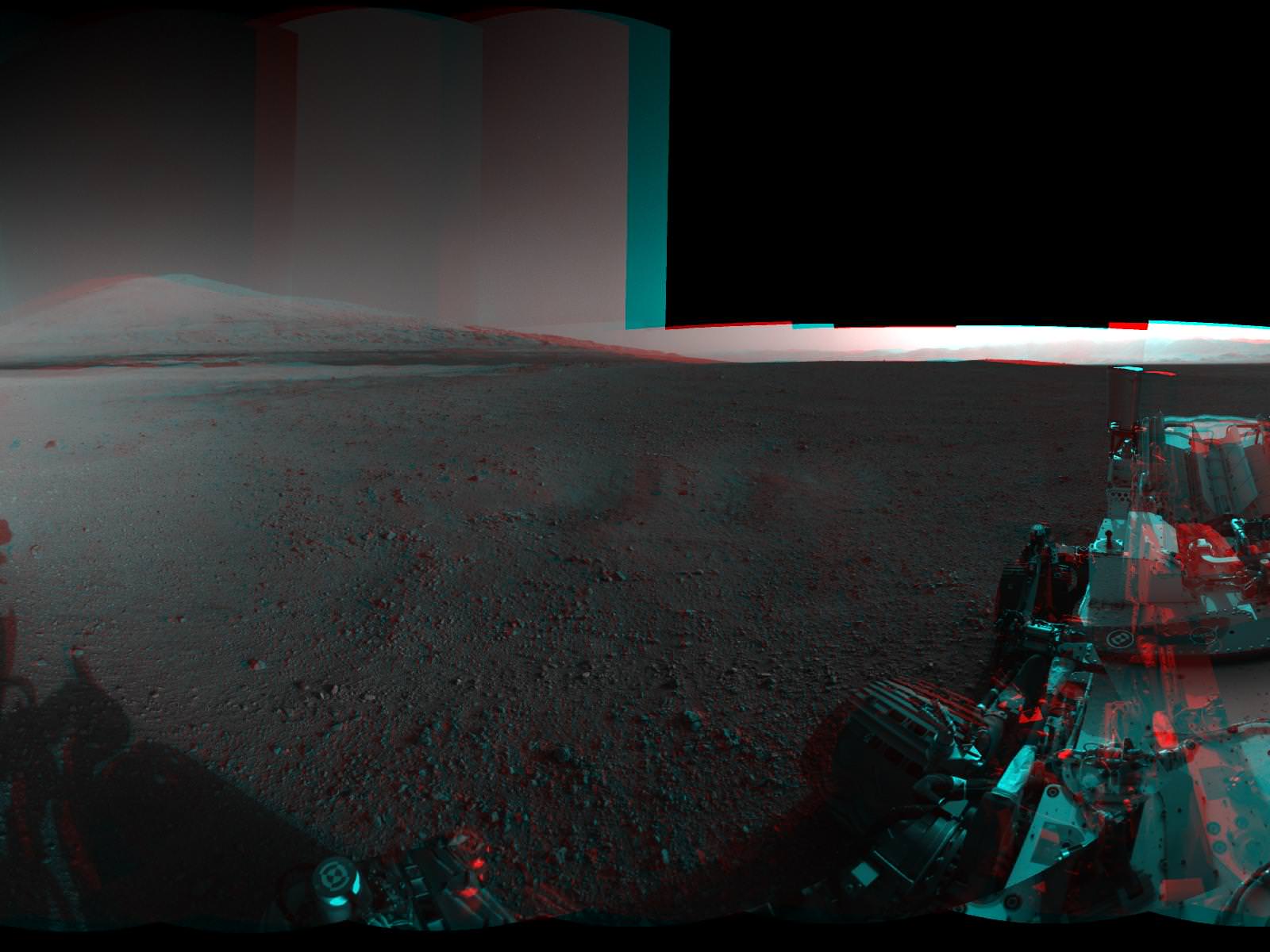
Image Caption: Panoramic mosaic shows gorgeous Glenelg snapped by Curiosity on Sol 64 (Oct. 10) with eroded crater rim and base of Mount Sharp in the distance. This is a cropped version of the full mosaic as assembled from 75 images acquired by the Mastcam 100 camera. Credit: NASA/JPL-Caltech/MSSS/Ken Kremer/Marco Di Lorenzo