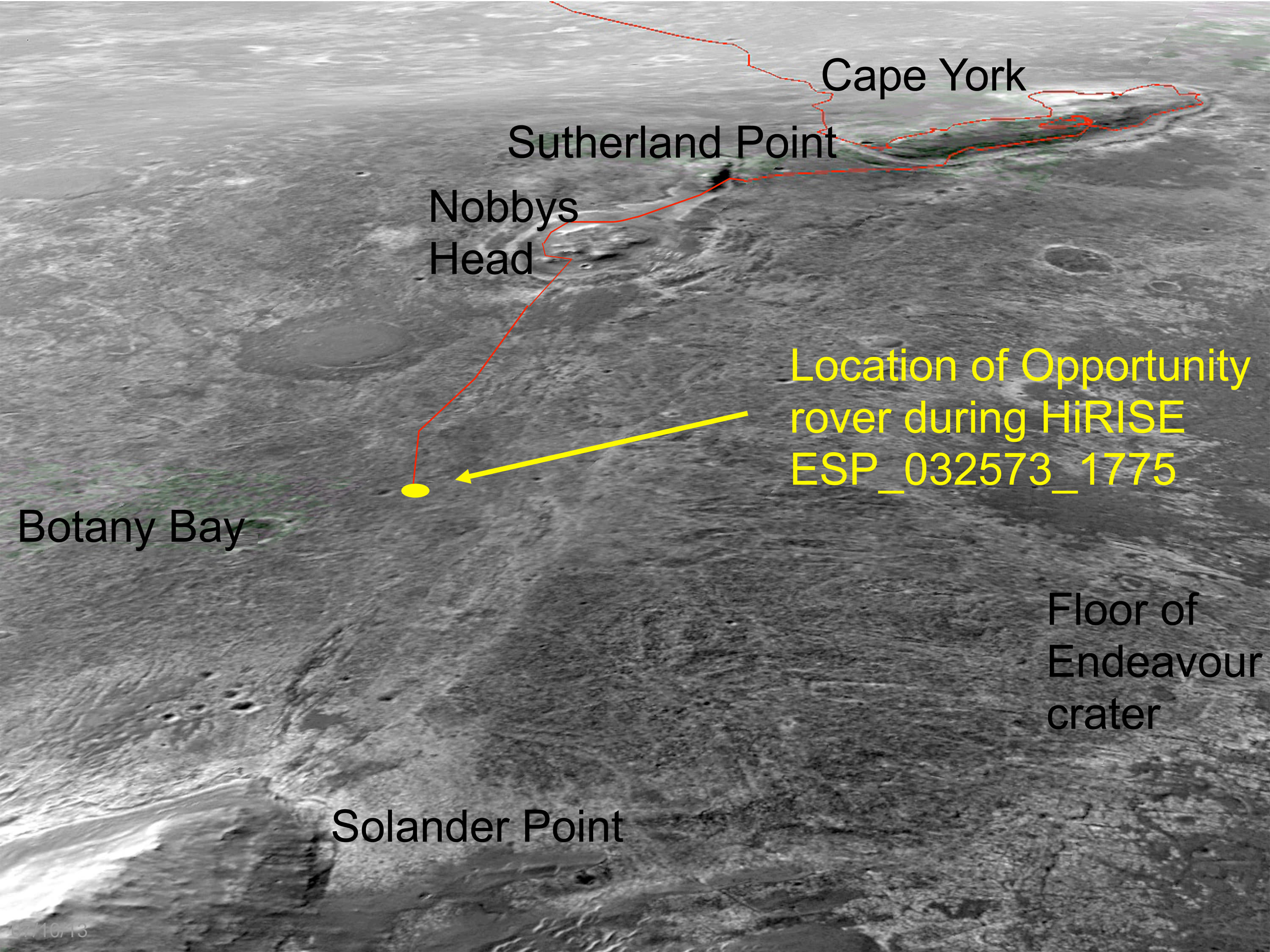
This image taken by the High Resolution Imaging Science Experiment (HiRISE) camera on NASA's Mars Reconnaissance Orbiter on July 8, 2013, captures Opportunity traversing south (at the end of the white arrow) to new science targets and a winter haven at "Solander Point," another portion of the Endeavour rim. The relatively level ground between Cape York and Solander Point is called "Botany Bay." The image was taken 10 years after Opportunity was launched from Florida on July 7, 2013, EDT and PDT (July 8, Universal Time). Image credit: NASA/JPL-Caltech/Univ. of Arizona.
Ten years to the day after the Opportunity rover launched to Mars, the HiRISE camera on the Mars Reconnaissance Orbiter snapped this image of the rover, still toiling away on the surface of Mars. The white dot in the image is Oppy, as the rover was crossing the level ground called “Botany Bay” on its way to a rise called “Solander Point.” We’re looking into whether there’s a way to determine if the rover was actually moving at the time the image was taken.
This, of course, is not the first time HiRISE has found the various rovers on Mars’ surface. Images from orbit help rover drivers find safe routes, as well as helping to identify enticing science targets for future investigation.
“The Opportunity team particularly appreciates the color image of Solander Point because it provides substantially more information on the terrains and traverse that Opportunity will be conducting over the next phase of our exploration of the rim of Endeavour crater,” said Mars Science Laboratory Project Scientist Matt Golombek, from JPL.
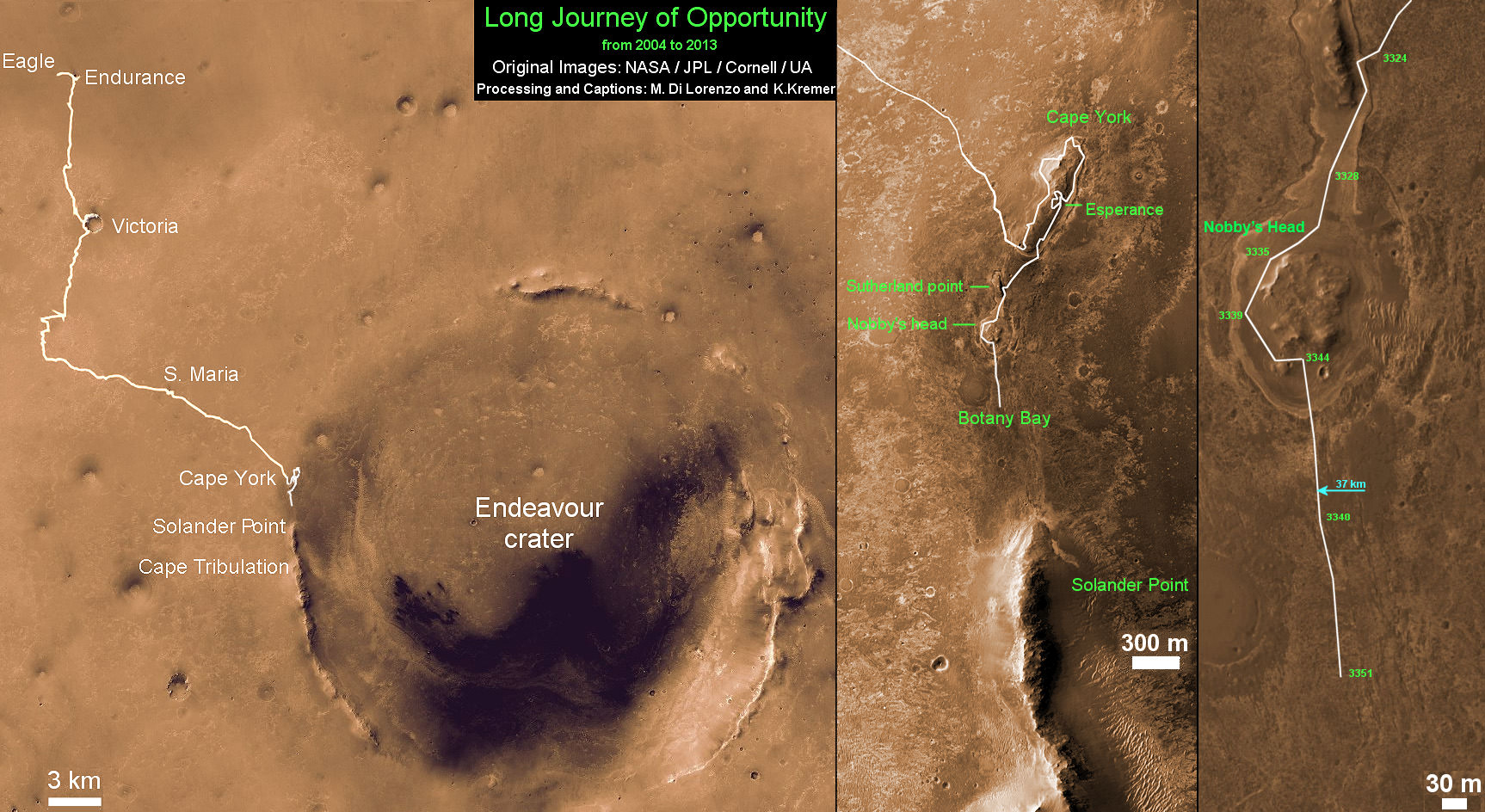
an oblique, northward-looking view based on stereo orbital imaging, shows the location of Opportunity on its journey from Cape York to Solander Point when HiRISE took the new color image. Endeavour Crater is about 14 miles (22 kilometers) in diameter. The distance from Cape York to Solander Point is about 1.2 miles (2 kilometers). The red line indicates the path the rover has driven. Credit: NASA/JPL-Caltech/Univ. of Arizona.
Opportunity currently holds the US space program’s all-time record for distance traversed on another planetary body at greater than 36 kilometers or 22 miles. The Lunar Reconnaissance Orbiter team recently confirmed that the Lunokhod 2 rover traveled 42 km (26 miles) on the Moon.
Opportunity was launched from on July 7, 2003, PDT and EDT (July 8, Universal Time). Opportunity has been on the western rim of 20-kilometer-diameter Endeavour Crater in Meridiani Planum for about two years investigating the 3 to 4 billion-year-old sedimentary layers of Cape York. Now the rover is traversing south to new science targets and a winter haven at Solander Point.
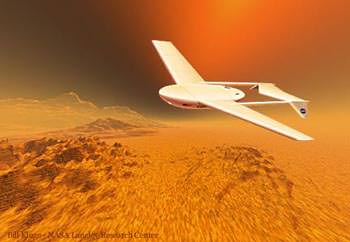
Building a flying vehicle for Mars would have significant advantages for exploration of the surface. However, to date, all of our surface exploring vehicles and robotic units on Mars have been terrestrial rovers. The problem with flying on Mars is that the Red Planet doesn’t have much atmosphere to speak of. It is only 1.6% of Earth air density at sea level, give or take. This means conventional aircraft would have to fly very quickly on Mars to stay aloft. Your average Cessna would be in trouble.
But nature may provide an alternative way of looking at this problem.
The fluid regime of any flying (or swimming) animal, machine, etc. can be summarized by something called the Reynolds Number (Re). The Re is equal to the characteristic length x velocity x fluid density, divided by the dynamic viscosity. It is a measure of the ratio of inertial forces to viscous ones. Your average airplane flies at a high Re: lots of inertia relative to air stickiness. Because the Mars air density is low, the only way to get that inertia is to go really fast. However, not all flyers operate at high Re: most flying animals fly at much lower Re. Insects, in particular, operate at quite small Reynolds numbers (relatively speaking). In fact, some insects are so small that they swim through the air, rather than fly. So, if we scale up a bug-like critter or small bird just a bit, we might get something that can move in the Martian atmosphere without having to go insanely fast.
A potential design of an ‘Entomopter’ from Georgia Tech Research InstituteWe need a system of equations to constrain our little bot. Turns out that’s not too tough. As a rough approximation, we can use Colin Pennycuick’s average flapping frequency equation. Based on the flapping frequency expectations from Pennycuick (2008), flapping frequency varies roughly as body mass to the 3/8 power, gravitational acceleration to the 1/2 power, span to the -23/24 power, wing area to the -1/3 power, and fluid density to the -3/8 power. That’s handy, because we can adjust to match Martian gravity and air density. But we need to know if we are shedding vortices from the wings in a reasonable way. Thankfully, there is a known relationship, there, as well: the Strouhal number. Str (in this case) is flapping amplitude x flapping frequency divided by velocity. In cruising flight, it turns out to be pretty constrained.
Our bot should, therefore, end up with a Str between 0.2 and 0.4, while matching the Pennycuick equation. And then, finally, we need to get a Reynolds number in the range for a large living flying insect (tiny insects fly in a strange regime where much of propulsion is drag-based, so we will ignore them for now). Hawkmoths are well studied, so we have their Re range for a variety of speeds. Depending on speed, it ranges from about 3,500 to about 15,000. So somewhere in that ballpark will do.
There are a few ways of solving the system. The elegant way is to generate the curves and look for the intersection points, but a fast and easy method is to punch it into a matrix program and solve iteratively. I won’t give all the possible options, but here’s one that worked out pretty well to give an idea:
Mass: 500 grams
Span: 1 meter
Wing Aspect Ratio: 8.0
This gives an Str of 0.31 (right on the money) and Re of 13,900 (decent) at a lift coefficient of 0.5 (which is reasonable for cruising). To give an idea, this bot would have roughly bird-like proportions (similar to a duck), albeit a bit on the light side (not tough with good synthetic materials). It would, however, flap through a greater arc at higher frequency than a bird here on Earth, so it would look a bit like a giant moth at distance to our Earth-trained eyes. As an added bonus, because this bot is flying in a moth-ish Reynolds Regime, it is plausible that it might be able to jump to the very high lift coefficients of insects for brief periods using unsteady dynamics. At a CL of 4.0 (which has been measured for small bats and flycatchers, as well as some large bees), the stall speed is only 19.24 m/s. Max CL is most useful for landing and launching. So: can we launch our bot at 19.24 m/s?
For fun, let’s assume our bird/bug bot also launches like an animal. Animals don’t take off like airplanes; they use a ballistic initiation by pushing from the substrate. Now, insects and birds use walking limbs for this, but bats (and probably pterosaurs) use the wings to double as pushing systems. If we made our bots wings push-worthy, then we can use the same motor to launch as to fly, and it turns out that not much push is required. Thanks to the low Mars gravity, even a little leap goes a long way, and the wings can already beat near 19.24 m/s as it is. So just a little hop will do it. If we’re feeling fancy, we can put a bit more punch on it, and that’ll get out of craters, etc. Either way, our bot only needs to be about 4% as efficient a leaper as good biological jumpers to make it up to speed.
These numbers, of course, are just a rough illustration. There are many reasons that space programs have not yet launched robots of this type. Problems with deployment, power supply, and maintenance would make these systems very challenging to use effectively, but it may not be altogether impossible. Perhaps someday our rovers will deploy duck-sized moth bots for better reconnaissance on other worlds.
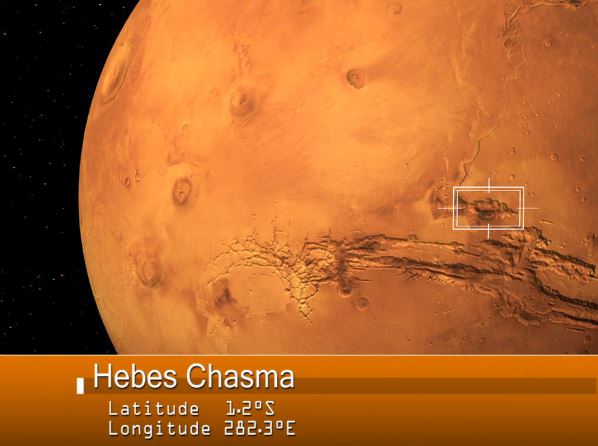
Screenshot from the video showing where Hebes Chasma is located on Mars. Via ESA.
Take a ride through a Hebes Chasma, a canyon just north of the largest canyon on Mars – and the Solar System — Valles Marineris. The video provides an awesome view, but this is not a wild ride with Luke Skywalker through trenches of the Death Star …. it’s more like a tourist pleasure cruise which provides picturesque views of this 8 km-deep canyon.
ESA provides all the tourist info of what you are seeing:
The movie glides over impact craters pockmarking the plains separating the troughs, down cliff faces scarred by landslides, and along the rough valley floor.
In some parts of the valley Mars Express has detected water-bearing minerals, suggesting that significant quantities of water may have once flowed here.
The formation of Hebes Chasma is likely connected to the nearby volcanic Tharsis region, home to the planet’s vast Olympus Mons volcano.
During periods of intense volcanism the whole region stretched upwards, causing tremendous stress in the crust further way. Unable to withstand the strain, the crust ripped open, collapsing into the chasms found in and around Valles Marineris.
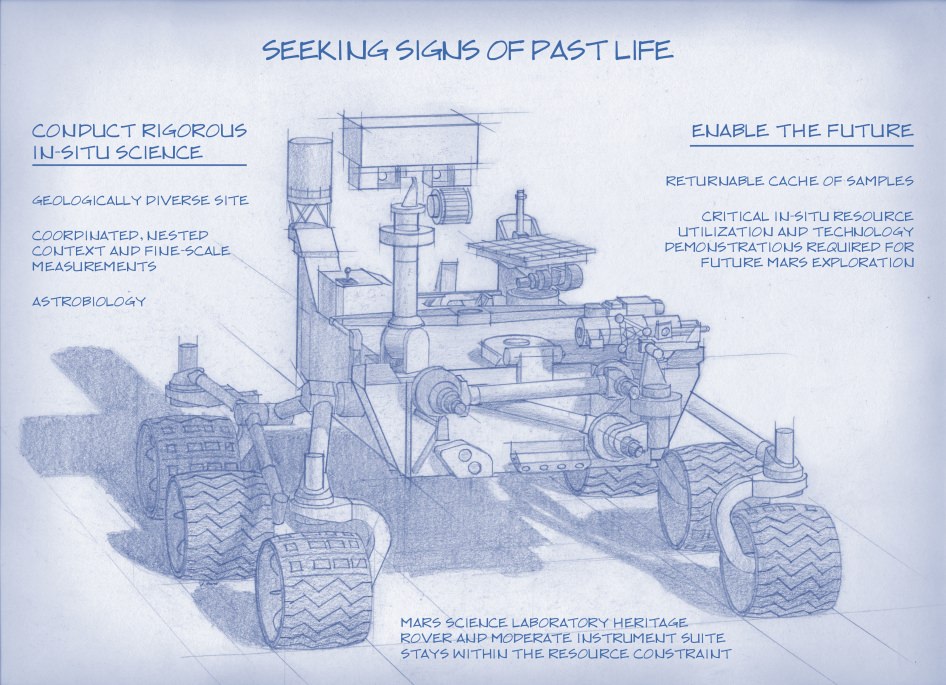
Artist's Concept of NASA’s Mars 2020 Rover envisions a basic structure that capitalizes on re-using the design and engineering work done for the NASA rover Curiosity, which landed on Mars in 2012, but with new science instruments for accomplishing different science objectives with the 2020 mission. Credit: NASA/JPL-Caltech
NASA’s next Mars rover set for liftoff in 2020 should focus on three primary objectives; seeking signs of past life, collecting a cache of carefully chosen samples for eventual return to Earth and developing technologies that will help enable future human missions to the Red Planet some two decades from now.
The 2020 goals were laid out publicly today (July 9) by a panel of scientists on the ‘Science Definition Team’ and charged by NASA with defining the key science objectives for the new mission.
The science objectives and how to accomplish them are outlined in considerable detail in a newly issued 154 page report handed over to the space agency and discussed at today’s NASA briefing for the media.
Looking for signs of ancient life and preserved biosignatures on Mars at a place that was once habitable is the top priority of the 2020 mission. The SDT report states that the landing site should be chosen specifically to “explore the geology of a once habitable site.”
“We need a highly mobile rover that can make ‘in situ’ science measurements,” said Jack Mustard, chairman of the Science Definition Team and a professor at the Geological Sciences at Brown University in Providence, R.I., at the briefing.
“The rover would use its own instruments on Mars for visual, mineralogical and chemical analysis down to a microscopic scale to identify candidate features that may have been formed by past life,” states the SDT report.
“We can’t do this now with Curiosity,” explained Mustard. “We need higher resolution.”
Looking for ‘extant’ life, that is life surviving on Mars today, would be a by-product of the search for organic molecules and preserved biosignatures of life – past or present.
The Mars 2020 ‘Science Definition Team’ (SDT) is comprised of 19 scientists and engineers from academia and industry. They were appointed by NASA in January 2013 to thoroughly and quickly evaluate a wide range of options to accomplish the highest priority planetary science objectives and achieve President Obama’s challenge to send humans to Mars in the 2030s.
Retrieving soil and rock samples from Mars for analysis back on Earth by research teams worldwide using all the most advanced analytical instruments available to humankind with unprecedented capability has been the ‘Holy Grail’ of Mars exploration for several decades.
But the enormous cost and technical complexity of a Mars Sample Return (MSR) mission has caused it to be repeatedly postponed.
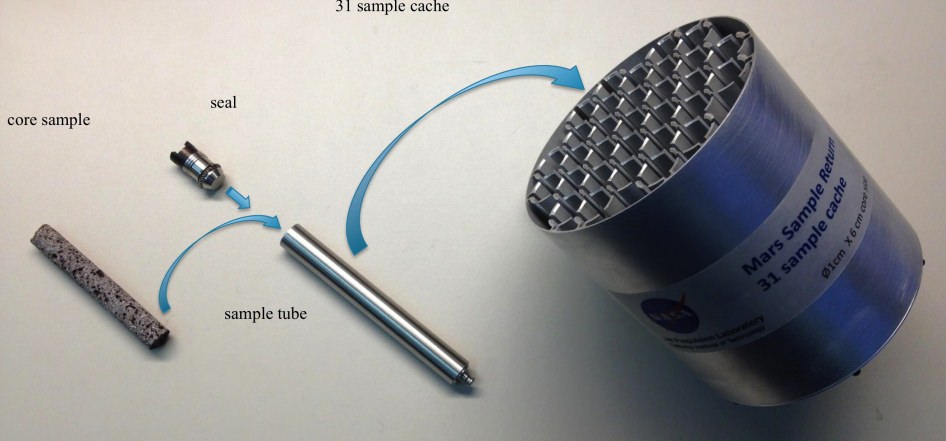
Creating a Returnable Cache of Martian Samples is a major objective for NASA’s Mars 2020 rover. This prototype show hardware to cache samples of cores drilled from Martian rocks for possible future return to Earth. The 2020 rover would be to collect and package a carefully selected set of up to 31 samples in a cache that could be returned to Earth by a later mission. The capabilities of laboratories on Earth for detailed examination of cores drilled from Martian rocks would far exceed the capabilities of any set of instruments that could feasibly be flown to Mars. The exact hardware design for the 2020 mission is yet to be determined. For scale, the diameter of the core sample shown in the image is 0.4 inch (1 centimeter). Credit: NASA/JPL-Caltech
The 2020 rover will be designed to make real progress on sample return for the first time. It will be capable of coring into rocks and storing 31 highly compelling Martian samples for return by a follow on mission to the Red Planet.
“But the timing on actually returning those samples to Earth is yet to be determined,” said John Grunsfeld, NASA’s associate administrator for science in Washington.
Everything NASA does is budget driven and the fiscal climate is rather gloomy right now.
“Crafting the science and exploration goals is a crucial milestone in preparing for our next major Mars mission,” said John Grunsfeld, NASA’s associate administrator for science in Washington, in a statement.
Work on the new rover must begin soon in order to achieve the mandatory 2020 launch deadline. Launch opportunities to Mars only open every 26 months and delays could balloon the costs by several hundred million dollars.
“The objectives determined by NASA with the input from this team will become the basis later this year for soliciting proposals to provide instruments to be part of the science payload on this exciting step in Mars exploration,” adds Grunsfeld.
“The 2020 rover will take a major step in ‘seeking signs of life” said Jim Green, director of NASA’s Planetary Science Division in Washington, at the briefing. “NASA will issue a call for science instruments this fall.”
The new mission would build upon the demonstrated science accomplishments of earlier missions like Curiosity, Spirit, Opportunity and Phoenix while vastly advancing the capabilities of the robots research instruments.
“Here’s the bottom line. Questions drive science,” explained Lindy Elkins-Tanton, SDT member and director of the Carnegie Institution for Science’s Department of Terrestrial Magnetism, Washington.
“We should be seeking to answer the very biggest questions. And one of the very biggest questions for all of humankind is – ‘Are we alone?’ And that is the question we’re hoping to make really big advances with on with this Mars 2020 mission.”
Grunsfeld explained that NASA has budgeted “for a mission cost of $1.5 Billion plus the cost of the launcher.”
The 2020 rover chassis, with some modifications, will be based on the blueprints of the highly successful Curiosity rover to keep down the cost and minimize risks. But the science instruments will be completely new and updated.
NASA’s 1 ton Curiosity rover touched down nearly a year ago and has already discovered that the Red Planet has the chemical ingredients and environmental conditions for a habitable zone that could have supported living Martian microbes.
The next logical step is to look for the ancient signs of life that would be preserved in the rock record on Mars.
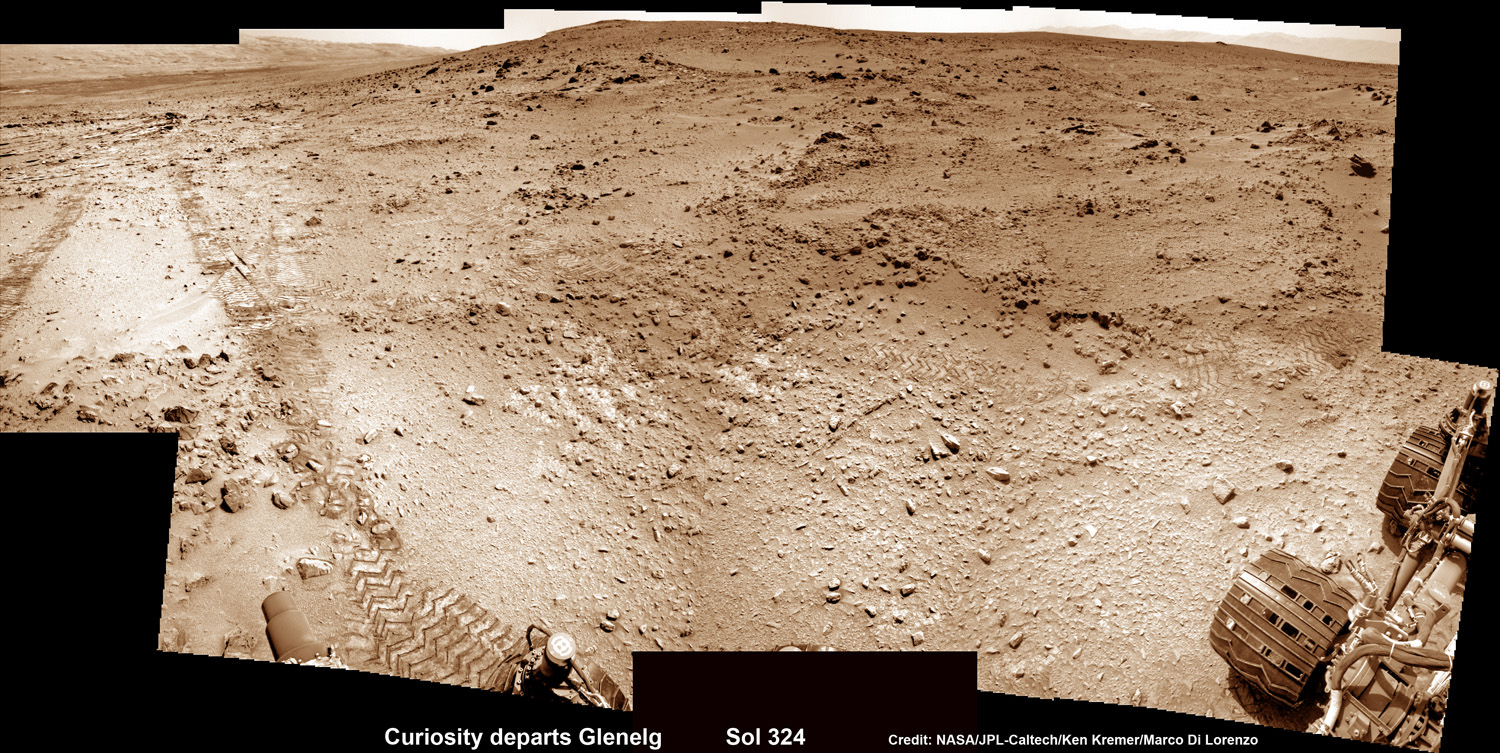
NASA’s 2020 Mars rover would be based on the Curiosity rover which touched down inside Gale Crater on Aug. 6, 2012 and discovered a habitable zone here. This photomosic shows NASA’s Curiosity departing Glenelg work site area at last for Mount Sharp- her main science destination, seen at top left. Note the wheel tracks on the Red Planet’s surface. The mosaic of navcam camera images was stitched from photos taken on July 4, 2013 (Sol 324). Credit: NASA/JPL-Caltech/Ken Kremer (kenkremer.com)/Marco Di Lorenzo
This photomosic shows NASA’s Curiosity departing at last for Mount Sharp- her main science destination. Note the wheel tracks on the Red Planet’s surface. The navcam camera images were taken on July 4, 2013 (Sol 324). Credit: NASA/JPL-Caltech/Ken Kremer (kenkremer.com)/Marco Di Lorenzo
NASA’s Curiosity rover has at last begun her epic trek to the layered slopes of mysterious Mount Sharp – the mission’s primary destination which looms supreme inside the Gale Crater landing site.
Scientists expect to discover signatures of the chemical ingredients that potentially are markers for a Martian habitable zone, while climbing up Mount Sharp.
On July 4 (Sol 324), the six wheeled robot started driving away from the Glenelg and Yellowknife Bay areas where she has worked more than half a year investigating the alien terrain and drilling into Martian rocks for the first time in history.
“We have started the long traverse to the base of Mt. Sharp (Aeolis Mons), the long-term goal of the mission!” announced science team member Ken Herkenhoff of the USGS.
So far the NASA rover already driven more than 190 feet (58 meters) over two excursions on July 4 and 7, away from her last science campaign at the Shaler outcrop of cross-bedded, sedimentary outcrops. Another drive is planned today.
Billions of years of Mars geologic history are preserved in the sedimentary layers of Mount Sharp- including the ancient time period when the Red Planet was far wetter and warmer than today, and thus more hospitable to the origin of life.
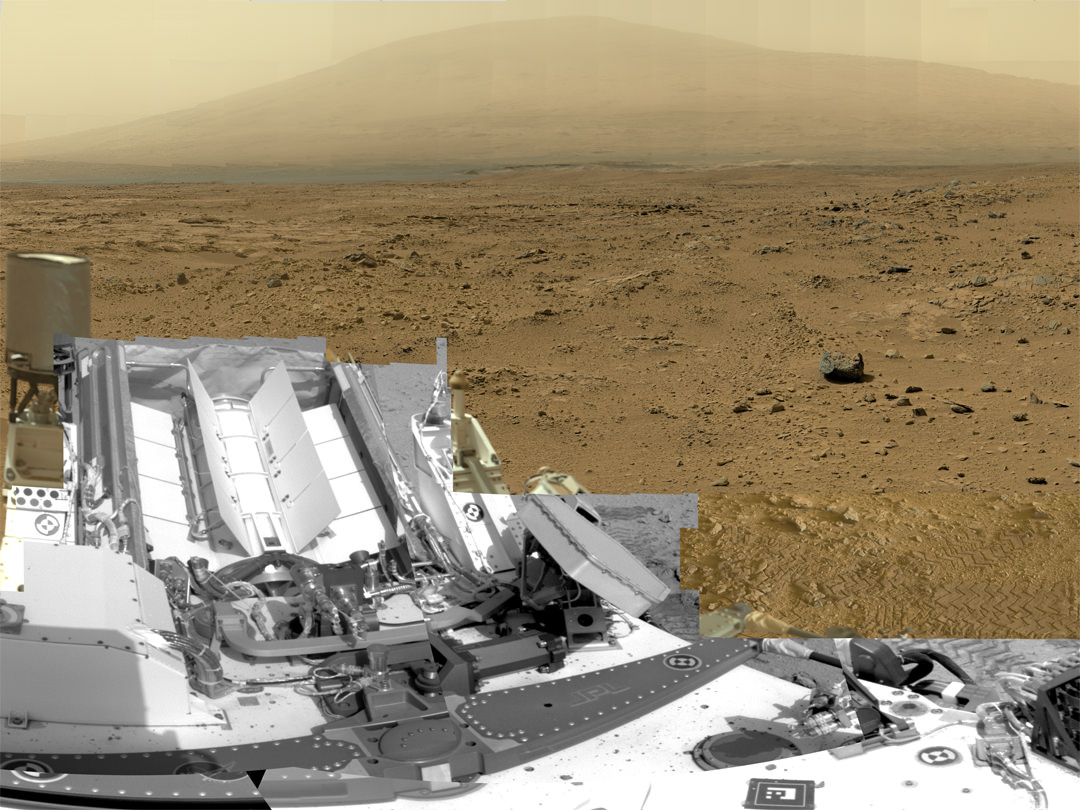
Billion-Pixel View From Curiosity at Rocknest, Raw Color. This full-circle view combined nearly 900 images taken by NASA’s Curiosity Mars rover, generating a panorama with 1.3 billion pixels in the full-resolution version. The view is centered toward the south, with north at both ends. It shows Curiosity at the “Rocknest” site where the rover scooped up samples of windblown dust and sand. Curiosity used three cameras to take the component images on several different days between Oct. 5 and Nov. 16, 2012. Credit: NASA/JPL-Caltech/MSSS
The huge mountain rises about 3.4 miles (5.5 km) from the center of Gale Crater. Its taller than Mount Ranier in Washington State.
The overland journey could take nearly a year or even longer into 2014 to arrive at the base of Mount Sharp, depending on what the 1 ton behemoth sees along the way.
And the scientists are eager to make as many discoveries as possible.
“The mission is discovery driven,” says John Grotznger of the California Institute of Technology in Pasadena, Calif., who leads NASA’s Curiosity Mars Science Laboratory mission. “We will go to where the science takes us.”
This is a cropped, reduced version of panorama from NASA’s Mars rover Curiosity with 1.3 billion pixels in the full-resolution version see full panorama above. It shows Curiosity at the “Rocknest” site where the rover scooped up samples of windblown dust and sand. Curiosity used three cameras to take the component images on several different days between Oct. 5 and Nov. 16, 2012. Viewers can explore this image with pan and zoom controls at http://mars.nasa.gov/bp1/. Credit: NASA/JPL-Caltech/MSSS
NASA chose Gale Crater as the landing site specifically to dispatch Curiosity to investigate the sedimentary layers of Mount Sharp because in surveys from Mars orbit it exhibited signatures of clay minerals that form in neutral water and that could possibly support the origin and evolution of simple Martian life forms, past or present.
“We have a real desire to get to Mount Sharp because there we see variations in the mineralogy as we go up from the base to higher levels and a change in the record of the environment,” explained Joy Crisp of JPL, Curiosity’s deputy project scientist.
“If we pass something amazing and compelling we might turn around and drive back,” Crisp added.
“The challenge for the science team will be to identify the most important targets along the way, and to study them without delaying drive progress too much,” notes Herkenoff.
Mount Sharp lies about 5 miles (8 kilometers) distant – as the Martian crow flies.
And Curiosity must also pass through a potentially treacherous dune field to get there.
“We are looking for the best path though,” said Curiosity Project Manager Jim Erickson of NASA’s Jet Propulsion Laboratory, Pasadena, Calif. at a recent media briefing.
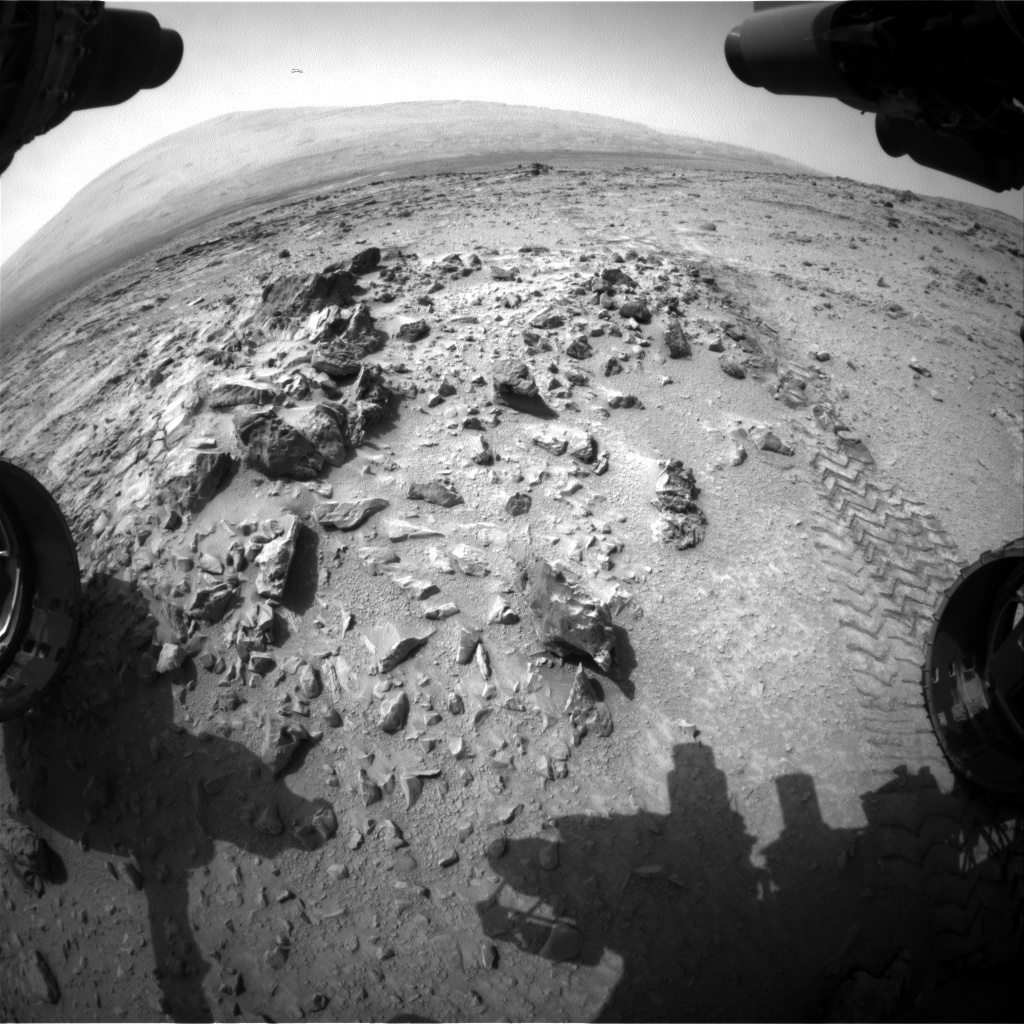
Fisheye view of Mount Sharp from the hazcam camera on July 6, 2013 (Sol 326). Credit: NASA/JPL-Caltech
11 months ago on Aug. 6 , 2012, Curiosity made an unprecedented pinpoint touchdown inside Gale Crater using the never before used Sky crane descent thrusters.
Long before even arriving at destination Mount Sharp, Curiosity has already successfully accomplished the key science objective of the mission when she discovered that liquid water flowed at this spot on Mars, it possesses the key chemical ingredients required for life and was habitable in the past.
Drill samples from the ‘John Klein’ outcrop at Yellowknife Bay analyzed by Curiosity’s pair of onboard chemistry labs – SAM & Chemin – revealed that this location contains clay minerals required to support microbial life forms.
“We have found a habitable environment [at John Klein] which is so benign and supportive of life that probably if this water was around, and you had been on the planet, you would have been able to drink it,” said Grotzinger.
Seeing familiar shapes in clouds is easy especially when you've got a handy reference. Credit: Andrew Kirk
As kids, my friends and I would stare at clouds on lazy summer afternoons and point out faces and animals we saw in their folds and domes. When the light was right, some of them looked as detailed and real as if chiseled by a meteorological Michelangelo. Later, with kids of our own, we often revisit this simple pleasure.
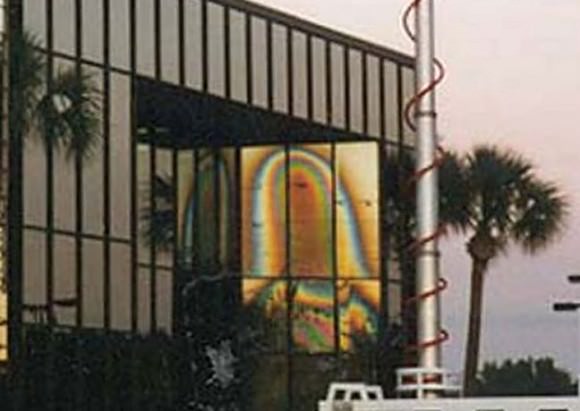
image of the “Virgin Mary” appears in the glass of a Tampa, Florida office building on Christmas Day 1996. Credit: Wikipedia
Patterns can materialize anywhere – old men with scraggly beards in carpeting, blocky visages in road cuts and even Jesus on toast. Here are 50 more fun examples. Our instinctive ability to find patterns in the often random mish-mash of nature is called pareidolia (pair-eye-DOLE-ya).
The late planetary scientist and astronomy popularizer Carl Sagan believed pattern-recognition was part of our evolutionary heritage:
“As soon as the infant can see, it recognizes faces, and we now know that this skill is hardwired in our brains,” wrote Sagan. “Those infants who a million years ago were unable to recognize a face smiled back less, were less likely to win the hearts of their parents, and less likely to prosper.”
Maybe it’s simpler than that. Face-recognition is critical because we ultimately need each other for survival not to mention keeping track of the kids in the grocery store. Pattern recognition also helped us find food back in the days of hunting and gathering. The ability to distinguish a particular plant or animal against the background noise meant the difference between a full belly or starvation.
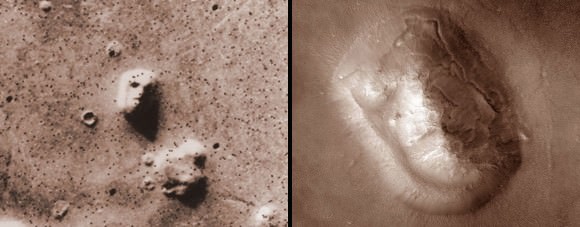
The infamous Mars Face (left) photographed in comparatively low resolution by the Viking orbiter in 1976 and a much higher resolution view made by current Mars Reconnaissance Orbiter. Credit: NASA
Pareidolia also works its magic across the cosmos. To narrow the scope, I’ve selected images taken of Mars, the most fertile planet for imaginary faces around. Who doesn’t remember all the hubbub over the “Face of Mars”? Old Viking spacecraft images from the mid-1970s taken at low resolution in slanted lighting seemed to show a face carved of rock staring back at Earth.
Since pareidolia works best when the stimulus is vague or the object unclear the “face” was perfect. Our brains are more than happy to fill in fictional details. Later photos taken at much lower altitude with higher resolution cameras made the face disappear; in its place we clearly see an eroded mesa. Then there’s the so-called “Bigfoot on Mars,” (an extremely very tiny Bigfoot) and later someone zoomed in on a small rock and said there was a gorilla on Mars. Information equals identity, lack of detail opens the door to anything we might imagine.
Here are 10 examples of imaginary faces and creatures on Mars. The inspiration to write about the topic came from a series of recent “art” images taken with the THEMIS camera on board the Mars Odyssey spacecraft. The probe orbits Mars every 2 hours and carries three science instruments; the camera combines images shot in 5 wavelengths or colors of visual light and 9 in the infrared or heat-emitting part of the spectrum. Others were snapped by the Mars Reconnaissance Orbiter. All are NASA images, and I’ve taken the liberty to colorize several of the black and whites to approximate the appearance of the color images.
Enjoy!
1.My Happy Martian
Martians obviously have a sense of humor. This 2-mile-wide (3 km) unnamed crater was photographed in 2008 by the Mars Reconnaissance Orbiter.
2. That Buzzing Sound
This crater chain with its wispy “wings” of impact debris resembles a wasp. The feature was most likely created when a meteorite arriving it at a very low angle broke into pieces just before impact.
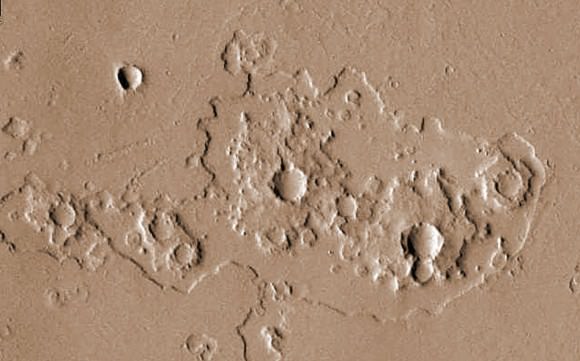
3. The Mammoth Still Lives
Lava flows in Mars’ Elysium Planitia region have left a rather good likeness of a woolly mammoth or elephant. The region is known for some of the planet’s youngest lavas – this one may have formed as recently as the past 100 million years.
4. Have A Heart (or two)
I love these two little hearts. The one on the left is a mesa top outlined by frost about the size of a football stadium. On the right, a small impact crater near the tip of the heart blew away dark surface material exposing lighter soil beneath. Some of the material appears to have flowed downslope to create the heart.
5. Rare Sighting Of A Dust-Covered Hummingbird
The head and long beak of a hummingbird is easy to imagine in this scene. I can’t say for sure how these features formed but wind and erosion no doubt played a part.
6. Hitchcockian Horror
Martian bird of prey or just another wayward pigeon?
7. Get It In Gear
The eroded blankets of ejecta blasted out when these craters formed look like a series of interlocking gears.
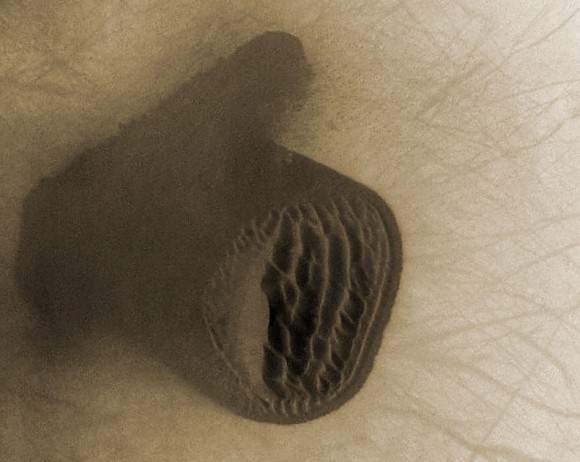
8. Lone Wolf On The Martian Prairie
Dark sand dune deposits look eerily like a howling wolf.
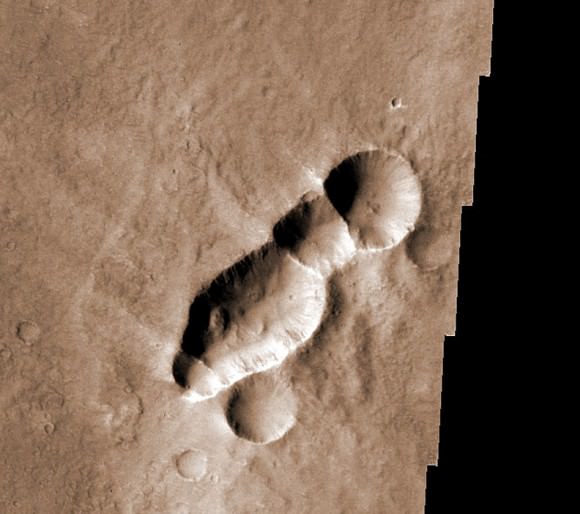
9. Thumbs Up!
These dunes remind me of a Minnesota “Thank you” for jump starting your car on a cold winter morning.
10. To A “T”
Tectonic stretching of the Martian crust created this unusual right-angle fracture. I wonder how many other letters of the alphabet we might find on the Red Planet?
Opportunity rover’s view across Botany Bay to Solander Point - her next destination - as NASA celebrates 10 Years since blastoff for Mars on July 7, 2003. The rover will climb up Solander Point because it which may harbor clay minerals indicative of a past Martian habitable environment. This pancam mosaic was assembled from raw images taken on Sol 3348 (June 24, 2013. Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer (kenkremer.com)
Opportunity rover’s view across Botany Bay to Solander Point – her next destination – as NASA celebrates 10 Years since blastoff for Mars on July 7, 2003. The rover will climb up Solander Point because it which may harbor clay minerals indicative of a past Martian habitable environment. This pancam mosaic was assembled from raw images taken on Sol 3348 (June 24, 2013.
Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer (kenkremer.com)[/caption]
Today, NASA’sOpportunity rover marks a magical moment celebrating 10 years since launching to Mars on July 7, 2003 and with her impending Mountain destination filling the camera’s eye view.
The now legendary robot has vastly exceeded everyone’s expectations. Back in 2003 the science team promised us a mere 90 day ‘warranty’ following the suspenseful airbag landing on Jan. 24, 2004 at Meridiani Planum.
Today is Martian Day (or Sol) 3360. That amounts to a life expectancy and exploration ‘bonus’ of more than 37 times beyond the design lifetime.
Launch of NASA’s 2nd Mars Exploration Rover, Opportunity, aboard a Delta II Heavy rocket to Mars on July 7, 2003 at 11:18 p.m. EDT from Pad 17-B at Cape Canaveral Air Force Station, Fla. Credit: NASA
Opportunity’s twin sister Spirit blasted off three weeks earlier in June 2003 and continued functioning until 2010.
“I never thought we’d achieve nine months!” Principal Investigator Prof. Steve Squyres of Cornell University told me recently on the occasion of the rovers 9th anniversary on Mars in January 2013.
As you read this, the now decade old rover Opportunity is blazing a trail toward’s the oldest geological deposits she has ever explored – at a place called Solander Point, a raised ridge along the eroded rim of huge Endeavour Crater.
Opportunity has surpassed the halfway point in the traverse from the rim segment she has explored the past 22 months at ‘Cape York’ to her next rim segment destination at Solander.
From tip to tip, Cape York and Solander Point lie 1.2-mile (2-kilometer) apart along the western rim of Endeavour Crater. Both are raised portions of 14-mile-wide (22-kilometer-wide) Endeavour.
The rover has less than half a mile (800 meters) to go to finish the Martian dash from one rim segment to the next across an area called ‘Botany Bay’.
This view from July 2, 2013 (Sol 3355) shows the terrain that NASA’s Mars Exploration Rover Opportunity is crossing in a flat area called “Botany Bay” on the way toward “Solander Point,” which is visible on the horizon. Credit: NASA/JPL-Caltech
“We are making very good progress crossing ‘Botany Bay,’ said John Callas of NASA’s Jet Propulsion Laboratory, Pasadena, Calif., who is project manager for the mission now entering its 2nd decade.
The flat terrain of fractured, light-toned bedrock is devoid of treacherous dunes and is easy to drive across, almost like a highway, which simplifies the daily planning by the rovers Earthly handlers.
“The surface that Opportunity is driving across in Botany Bay is polygonally fractured outcrop that is remarkably good for driving,” said Brad Joliff, an Opportunity science team member and long-term planner at Washington University in St. Louis. “The plates of outcrop, like a tiled mosaic pavement, have a thin covering of soil, not enough to form the wind-blown ripples we’ve had to deal with during some other long treks. The outcrop plates are light-toned, and the cracks between them are filled with dark, basaltic soil and our old friends the ‘blueberries.”
The “blueberries” are hematite-rich, erosion-resistant concretions about the size of BB’s that Opportunity discovered when she first opened her eyes at her Eagle crater landing site. During the multi year crater hopping tour that ensued, the rover continued finding patches of blueberries all the way to Endeavour crater.
1st color panorama taken by Opportunity after landing inside Eagle Crater on Jan. 24, 2004. Credit: NASA/JPL/Cornell
Opportunity is expected to arrive at Solander’s foothills sometime in August – before the onset of the next southern hemisphere Martian winter, her 6th altogether.
Opportunity will scale Solander to continue the science quest in search of additional evidence of habitable environments with the chemical ingredients necessary to sustain Martian microbial life.
“Right now the rover team is discussing the best way to approach and drive up Solander,” Ray Arvidson told Universe Today. Arvidson is the mission’s deputy principal scientific investigator from Washington University in St. Louis, Mo.
‘Solander Point’ offers roughly about a 10 times taller stack of geological layering compared to ‘Cape York.’
Solander also offers north facing slopes where Opportunity’s solar wings can more effectively soak up the sun’s rays to generate life giving electrical power.
The robot remains in excellent health.
The total driving distance exceeds 23 miles (37 kilometers). She has snapped over 181,000 images.
Meanwhile on the opposite side of Mars at Gale Crater, Opportunity’s younger sister rover Curiosity also discovered a habitable environment originating from a time when the Red Planet was far warmer and wetter billions of years ago.
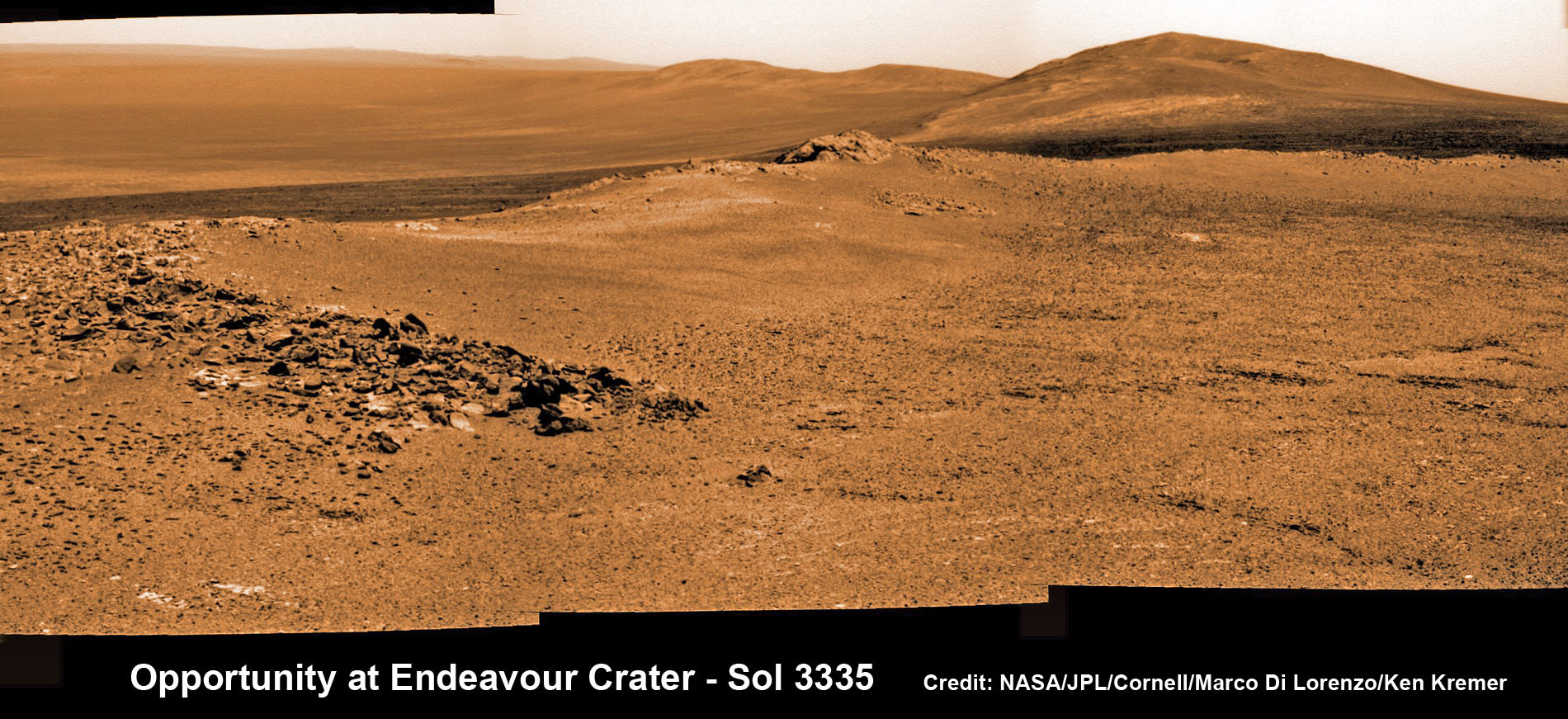
Opportunity captures spectacular panoramic view ahead to her upcoming mountain climbing goal, the raised rim of “Solander Point” at right, located along the western edge of Endeavour Crater. It may harbor clay minerals indicative of a habitable zone. The rise at left is “Nobbys Head” which the rover just passed on its southward drive to Solander Point from Cape York. This pancam photo mosaic was taken on Sol 3335, June 11, 2013 shows vast expanse of the central crater mound and distant Endeavour crater rim. Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer (kenkremer.com) Traverse Map for NASA’s Opportunity rover from 2004 to 2013
This map shows the entire path the rover has driven during more than 9 years and over 3360 Sols, or Martian days, since landing inside Eagle Crater on Jan 24, 2004 to current location heading south to Solander Point from Cape York ridge at the western rim of Endeavour Crater. Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer
Mars moon Phobos rising in the night time Martian sky shortly after sunset in this image from a movie taken by NASA's Mars rover Curiosity on Sol 317, June 28, 2013. The apparent ring is an imaging artifact The Credit: NASA/JPL-Caltech See the complete ‘Phobos Rising’ movie below
Mars moon Phobos (above, center) rising in the night time Martian sky shortly after sunset in this still image from a movie taken by NASA’s Mars rover Curiosity on Sol 317, June 28, 2013. The apparent ring is an imaging artifact. Credit: NASA/JPL-Caltech See the complete ‘Phobos Rising’ movie below [/caption]
Every once in a while when the time is just right and no one is looking, Curiosity’s Earthly handlers allow her some night time Martian delights.
In this case a pair of rising and setting celestial events bookend another magnificent week in humankinds exploration of the Red Planet – courtesy of NASA.
This past week NASA’s Curiosity rover captured esthetically stunning imagery of Phobos rising and Our Sun setting on Mars.
Phobos is the larger of Mars pair of tiny moons. The other being Diemos.
On June 28, (Sol 317) Curiosity aimed her navigation camera straight overhead to captured a breathtaking series of 86 images as Phobos was ascending in the alien evening sky shortly after sunset.
NASA combined these raw images taken over about 27 minutes into a short movie clip, sped up from real time.
Video Caption: ‘Phobos Rising’ – This movie clip shows Phobos, the larger of the two moons of Mars, passing overhead, as observed by NASA’s Mars rover Curiosity in a series of images centered straight overhead starting shortly after sunset. Phobos first appears near the lower center of the view and moves toward the top of the view. The images were taken on June 28, 2013. The apparent ring is an imaging artifact. Credit: NASA/JPL-Caltech
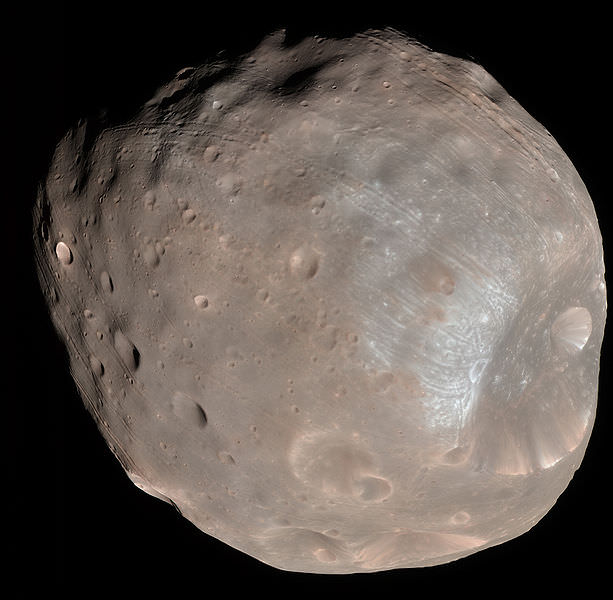
The pockmarked and potato shaped moon measures about 26.8 × 22.4 × 18.4 kilometers.
Phobos orbits barely some 6,000 km (3,700 mi) above the Martian surface. One day far in the future, it will crash and burn.
On June 22, Curiosity snapped an evocative series of Martian sunset photos as Sol set behind the eroded rim of Gale Crater – see below.
In the 2030’s, Humans may visit Phobos first before setting foot on the much more technically challenging Red Planet.
Sunset at Gale Crater
Martian sunset vista at Gale crater rim snapped by Curiosity on Sol 312, June 22, 2013. Colorized navcam image. Credit: NASA/JPL-Caltech/Ken Kremer/Marco Di LorenzoPhobos from NASA’s Mars Reconnaissance Orbiter on March 23, 2008. Credit: NASA
Opportunity rover captures spectacular view ahead to her upcoming mountain climbing goal, the raised rim of “Solander Point” at right, located along the western edge of Endeavour Crater. It may harbor clay minerals indicative of a habitable zone. This pancam photo mosaic was taken on Sol 3335, June 11, 2013. Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer (kenkremer.com) See full panoramic scene below
Opportunity rover captures spectacular view ahead to her upcoming mountain climbing goal, the raised rim of “Solander Point” at right, located along the western edge of Endeavour Crater. It may harbor clay minerals indicative of a habitable zone. This pancam photo mosaic was taken on Sol 3335, June 11, 2013. Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer (kenkremer.com)
See full panoramic scene – below Your last chance to “Send Your Name to Mars aboard NASA’s MAVEN orbiter” – below[/caption]
NASA’s nearly decade old Opportunity Mars rover is sailing swiftly on a southerly course towards her first true mountain climbing destination – named “Solander Point” – in search of further evidence of habitable environments with the chemical ingredients necessary to sustain Martian life forms.
At Solander Point, researchers have already spotted deep stacks of ancient rocks transformed by flowing liquid water eons ago. It is located along the western rim of huge Endeavour Crater.
“Right now the rover team is discussing the best way to approach and drive up Solander,” Ray Arvidson told Universe Today. Arvidson is the mission’s deputy principal scientific investigator from Washington University in St. Louis, Mo.
Solander Point may harbor clay minerals in the rock stacks indicative of a past Martian habitable zone.
“One idea is to drive part way up Solander from the west side of the rim, turn left and then drive down the steeper north facing slopes with the stratographic sections,” Arvidson told me.
“That way we don’t have to drive up the relatively steeper slopes. The rover can drive up rocky surfaces inclined about 12 to 15 degrees.”
“We want to go through the stratographic sections on the north facing sections.”
Solander Point mosaic captured by high resolution pancam camera on Sol 3334, June 10, 2013. Opportunity will scale Solander after arriving in August 2013 in search of chemical ingredients to sustain Martian microbes Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer (kenkremer.com)
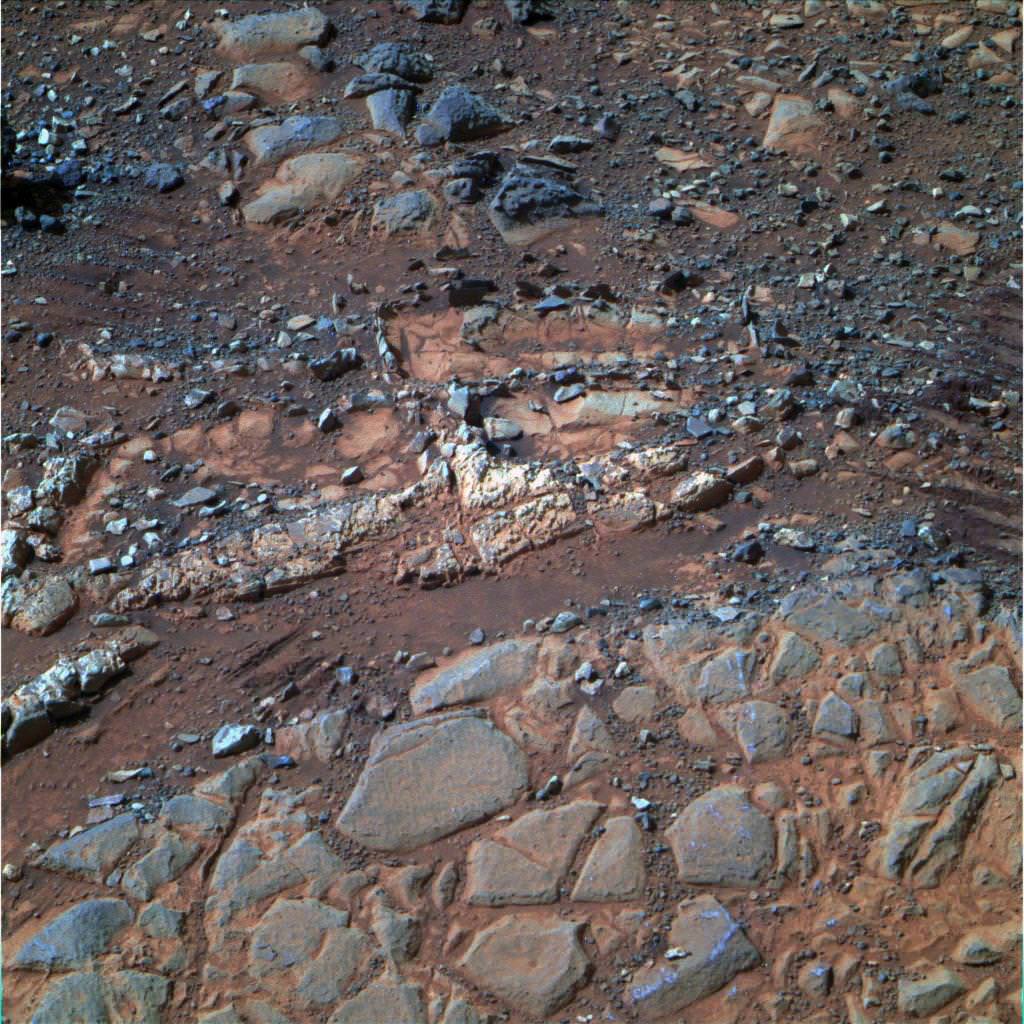
The science team hopes that by scaling Solander, Opportunity will build on her recent historic discovery of a habitable environment at a rock called “Esperance” that possesses a cache of phyllosilicate clay minerals.
These aluminum rich clay minerals typically form in neutral, drinkable water that is not extremely acidic or basic and therefore could support a path to potential Martian microbes.
“Esperance ranks as one of my personal Top 5 discoveries of the mission,” said Steve Squyres of Cornell University, Ithaca, N.Y., principal investigator for NASA’s rover mission at a recent media briefing.
‘Esperance’ Target Examined by Opportunity in May 2013. The pale rock called “Esperance,” has a high concentration of clay minerals formed in near neutral water indcating a spot favorable for life. Credit: NASA/JPL-Caltech/Cornell Univ./Arizona State Univ.
Using high resolution CRISM spectral data collected from Mars orbit, the rover was specifically directed to Esperance, Arvidson explained. The rock was found about a kilometer back on Matijevic Hill at ‘Cape York’, a rather low hilly segment of the western rim of giant Endeavour crater which spans 14 miles (22 km) across.
‘Solander Point’ offers roughly about a 10 times taller stack of geological layering compared to ‘Cape York.’ Both areas are raised segments of the western rim of Endeavour Crater.
The team is working now to obtain the same type of high resolution spectral evidence for phyllosilicate clay minerals at Solander as they had at Cape York to aid in targeting Opportunity to the most promising outcrops, Arvidson explained.
Opportunity is snapping ever more spectacular imagery of Solander Point and the eroded rim of Endeavour Crater as she approaches closer every passing Sol, or Martian Day. See our original photo mosaics herein by Marco Di Lorenzo and Ken Kremer.
Opportunity captures spectacular panoramic view ahead to her upcoming mountain climbing goal, the raised rim of “Solander Point” at right, located along the western edge of Endeavour Crater. It may harbor clay minerals indicative of a habitable zone. The rise at left is “Nobbys Head” which the rover just passed on its southward drive to Solander Point from Cape York. This pancam photo mosaic was taken on Sol 3335, June 11, 2013 shows vast expanse of the central crater mound and distant Endeavour crater rim.
Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer (kenkremer.com)
The long lived robot arrived at the edge of Endeavour crater in mid-2011 and will spend her remaining life driving around the scientifically rich crater rim segments.
On June 21, 2013, Opportunity marked five Martian years on Mars since landing on Jan 24, 2004 with a mere 90 day (Sol) ‘warranty’.
This week Opportunity’s total driving distance exceeded 23 miles (37 kilometers).
The solar powered robot remains in excellent health and the life giving solar arrays are producing plenty of electrical power at the moment.
Solander Point also offers northerly tilled slopes that will maximize the power generation during Opportunity’s upcoming 6th Martian winter .
The rover handlers want Opportunity to reach Solander’s slopes by August, before winter’s onset.
As ot today (tosol) Opportunity has trekked about halfway from Cape York to Solander Point – tip to tip.
On the opposite side of Mars at Gale Crater, Opportunity’s younger sister rover Curiosity also discovered clay minerals and a habitable environment originating from a time when the Red Planet was far warmer and wetter billions of years ago.
And this is your last chance to “Send Your Name to Mars” aboard NASA’s MAVEN orbiter- details here. Deadline: July 1, 2013. Launch: Nov. 18, 2013
Wide angle view of Endeavour Crater showing Solander Point and Cape Tribulation in this photo mosaic captured by navcam camera on Sol 3335, June 11, 2013. Opportunity will scale Solander after arriving in August 2013 in search of chemical ingredients to sustain Martian microbes. Credit: NASA/JPL/Cornell/Marco Di Lorenzo/Ken Kremer (kenkremer.com)Traverse Map for NASA’s Opportunity rover from 2004 to 2013. This map shows the entire path the rover has driven during more than 9 years and over 3351 Sols, or Martian days, since landing inside Eagle Crater on Jan 24, 2004 to current location heading south to Solander Point from Cape York ridge at the western rim of Endeavour Crater. Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer
This is a cropped, reduced version of panorama from NASA's Mars rover Curiosity with 1.3 billion pixels in the full-resolution version see full panorama below. It shows Curiosity at the "Rocknest" site where the rover scooped up samples of windblown dust and sand. Curiosity used three cameras to take the component images on several different days between Oct. 5 and Nov. 16, 2012. Viewers can explore this image with pan and zoom controls at http://mars.nasa.gov/bp1/. Credit: NASA/JPL-Caltech/MSSS
This is a cropped, reduced version of panorama from NASA’s Mars rover Curiosity with 1.3 billion pixels in the full-resolution version. See full panorama below. It shows Curiosity at the “Rocknest” site where the rover scooped up samples of windblown dust and sand. Curiosity used three cameras to take the component images on several different days between Oct. 5 and Nov. 16, 2012. Viewers can explore this image with pan and zoom controls at http://mars.nasa.gov/bp1/. Credit: NASA/JPL-Caltech/MSSS Updated with link to interactive Gigapan version
[/caption]
NASA’s newly produced and absolutely spectacular panorama from the Curiosity mega rover offers armchair explorers back on Earth a mammoth 1.3 billion pixels worth of Mars in all its colorful glory.
And everyone can move back and forth around the interactive panorama and zoom in – with special embedded tools- to your hearts delight in exquisite detail at the ‘Rocknest’ site where the rover spent her first extended science stay in late 2012.
This extra special Rocknest panorama is the first NASA- produced view comprising more than a billion pixels from the surface of the Red Planet.
It offers a full 360 degree panoramic view around the rover encompassing breathtaking vistas of Mount Sharp and the eerie rim of Gale Crater, some 20 miles distant.
Mount Sharp rises 3.4 miles (5.5 km) high and is the target destination. The team hopes Curiosity will arrive at the base of Mount Sharp perhaps late this year or early in 2014.
The ‘Rocknest’ scene was assembled from nearly 900 raw images snapped by three different cameras among the 17 total that Curiosity uses as she trundles across the crater floor in search of the ingredients of life.
Billion-Pixel View From Curiosity at Rocknest, Raw Color. This full-circle, reduced view combined nearly 900 images taken by NASA’s Curiosity Mars rover, generating a panorama with 1.3 billion pixels in the full-resolution version. The view is centered toward the south, with north at both ends. It shows Curiosity at the “Rocknest” site where the rover scooped up samples of windblown dust and sand. Curiosity used three cameras to take the component images on several different days between Oct. 5 and Nov. 16, 2012. Credit: NASA/JPL-Caltech/MSSS
The panorama was created by Bob Deen of the Multi-Mission Image Processing Laboratory at NASA’s Jet Propulsion Laboratory, Pasadena, Calif, where the mission is managed on a daily basis.
“It gives a sense of place and really shows off the cameras’ capabilities,” said Deen in a statement. “You can see the context and also zoom in to see very fine details.”
Check here for the full, billion pixel interactive cylindrical and panoramic viewers
“Rocknest” was a windblown ripple of sand dunes that Curiosity drove to after departing from the touchdown site at ‘Bradbury Landing’ and thoroughly investigated in October and November 2012.
It was at ‘Rocknest’ where the six wheeled rover famously deployed her robotic arm to scoop into the Martian dirt for the very first time and then delivered those first grains to the duo of analytical chemistry labs inside her belly that lie at the heart of Curiosity’s science mission.
Deen assembled the color product using 850 raw images from the 100 mm telephoto camera of Curiosity’s Mast Camera instrument, supplemented with 21 more from the Mastcam’s wider-angle 34 mm camera.
In order to take in the rover itself, the view also included 25 black-and-white raw images from the Navigation Camera on the Mast.
All the images were taken between Oct. 5 and Nov. 16, 2012 while the rover was stationary at Rocknest.
And check this link to a new NASA JPL Curiosity gallery on the GigaPan website – here
Because the images were captured over many days and at different times of day, the lighting and atmospheric clarity varies – especially in distant views to the crater rim.
Since landing on August 6, 2012, Curiosity has already accomplished her primary goal of finding a habitable zone at Gale Crater with an environment that could once of supported Martian microbial life – at the current worksite at ‘Yellowknife Bay.’
Time lapse context view of Curiosity maneuvering her robotic arm to conduct close- up examination of windblown ‘Rocknest’ ripple site. Curiosity inspects “bootlike” wheel scuff mark with the APXS (Alpha Particle X-Ray Spectrometer) and MAHLI (Mars Hand Lens Imager) instruments positioned on the rotatable turret at the arm’s terminus. Mosaic stitched from Navcam images on Sols 57 & 58 shows the arm in action just prior to 1st sample scooping here. Eroded rim of Gale Crater rim is visible on the horizon. Credit: NASA/JPL-Caltech/Ken Kremer (kenkremer.com)/Marco Di Lorenzo
The 1 ton robot is equipped with 10 state-of-the-art science instruments with research capabilities that far surpass any prior landed mission and is in the middle of the 2-year primary mission to the Red Planet.
Meanwhile, Curiosity’s older sister rover Opportunity has also discovered clay minerals and a habitable zone on the opposite side of the Red Planet – details here.
And don’t forget to “Send Your Name to Mars” aboard NASA’s MAVEN orbiter- details here. Deadline: July 1, 2013
…………….
Learn more about Mars, Curiosity, Opportunity, MAVEN, LADEE and NASA missions at Ken’s upcoming lecture presentations
June 23: “Send your Name to Mars on MAVEN” and “CIBER Astro Sat, LADEE Lunar & Antares Rocket Launches from Virginia”; Rodeway Inn, Chincoteague, VA, 8 PM
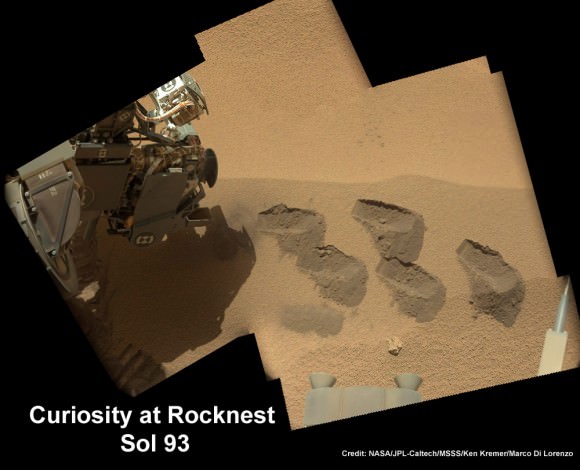
Curiosity scooped 5 times into Martian soil at Rocknest windblown ripple and delivered samples to the SAM chemistry instrument for analysis. This color mosaic was stitched together from hi-res color images taken by the robots 34 mm Mastcam camera on Sols 93 and 74. Credit: NASA / JPL-Caltech /MSSS/Ken Kremer (kenkremer.com)/Marco Di Lorenzo






















{kind=link}