The Universe is a very big place, and we occupy a very small corner of it. Known as the Solar System, our stomping grounds are not only a tiny fraction of the Universe as we know it, but is also a very small part of our galactic neighborhood (aka. the Milky Way Galaxy). When it comes right down to it, our world is just a drop of water in an endless cosmic sea.
Nevertheless, the Solar System is still a very big place, and one which is filled with its fair share of mysteries. And in truth, it was only within the relatively recent past that we began to understand its true extent. And when it comes to exploring it, we’ve really only begun to scratch the surface.
Discovery:
With very few exceptions, few people or civilizations before the era of modern astronomy recognized the Solar System for what it was. In fact, the vast majority of astronomical systems posited that the Earth was a stationary object and that all known celestial objects revolved around it. In addition, they viewed it as being fundamentally different from other stellar objects, which they held to be ethereal or divine in nature.
Although there were some Greek, Arab and Asian astronomers during Antiquity and the Medieval period who believed that the universe was heliocentric in nature (i.e. that the Earth and other bodies revolved around the Sun) it was not until Nicolaus Copernicus developed his mathematically predictive model of a heliocentric system in the 16th century that it began to become widespread.

During the 17th-century, scientists like Galileo Galilei, Johannes Kepler, and Isaac Newton developed an understanding of physics which led to the gradual acceptance that the Earth revolves round the Sun. The development of theories like gravity also led to the realization that the other planets are governed by the same physical laws as Earth.
The widespread use of the telescope also led to a revolution in astronomy. After Galileo discovered the moons of Jupiter in 1610, Christian Huygens would go on to discover that Saturn also had moons in 1655. In time, new planets would also be discovered (such as Uranus and Neptune), as well as comets (such as Halley’s Comet) and the Asteroids Belt.
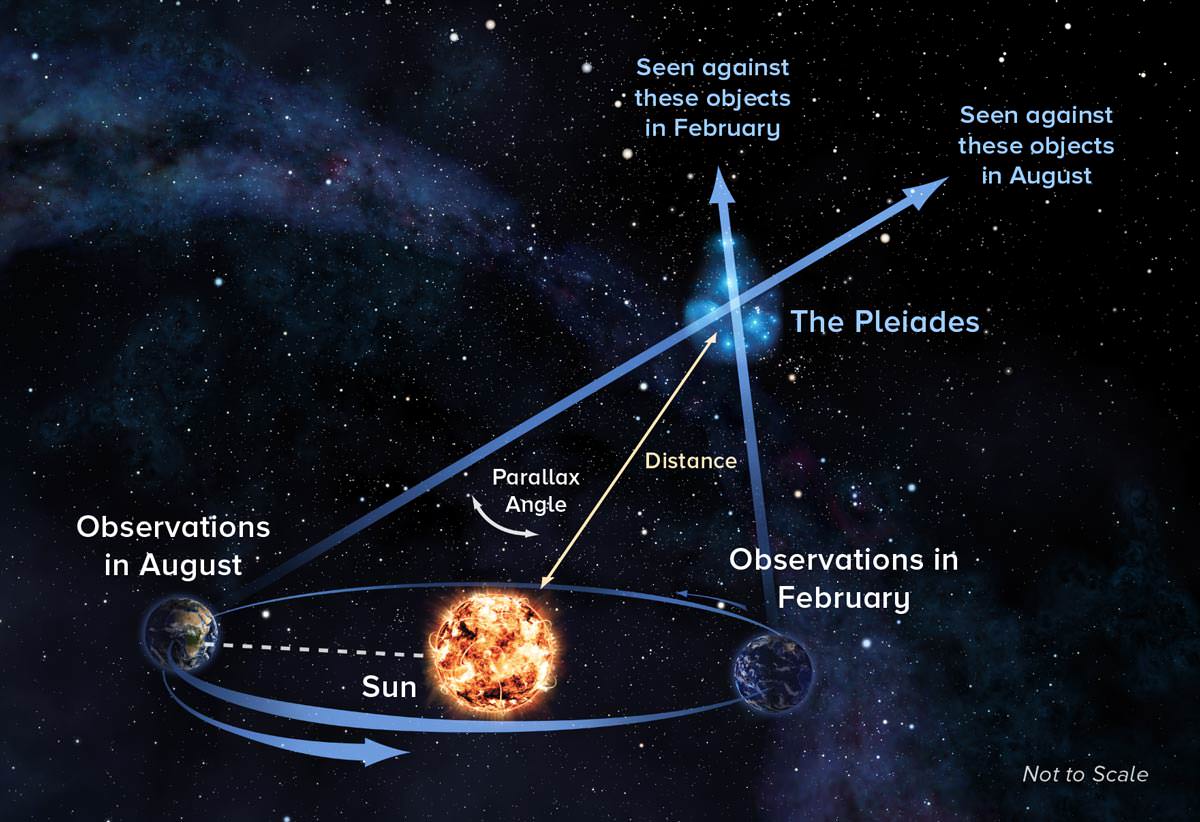
By the 19th century, three observations made by three separate astronomers determined the true nature of the Solar System and its place the universe. The first was made in 1839 by German astronomer Friedrich Bessel, who successfully measured an apparent shift in the position of a star created by the Earth’s motion around the Sun (aka. stellar parallax). This not only confirmed the heliocentric model beyond a doubt, but revealed the vast distance between the Sun and the stars.
In 1859, Robert Bunsen and Gustav Kirchhoff (a German chemist and physicist) used the newly invented spectroscope to examined the spectral signature of the Sun. They discovered that it was composed of the same elements as existed on Earth, thus proving that Earth and the heavens were composed of the same elements.
Then, Father Angelo Secchi – an Italian astronomer and director at the Pontifical Gregorian University – compared the spectral signature of the Sun with those of other stars, and found them to be virtually identical. This demonstrated conclusively that our Sun was composed of the same materials as every other star in the universe.
Further apparent discrepancies in the orbits of the outer planets led American astronomer Percival Lowell to conclude that yet another planet, which he referred to as “Planet X“, must lie beyond Neptune. After his death, his Lowell Observatory conducted a search that ultimately led to Clyde Tombaugh’s discovery of Pluto in 1930.
Also in 1992, astronomers David C. Jewitt of the University of Hawaii and Jane Luu of the MIT discovered the Trans-Neptunian Object (TNO) known as (15760) 1992 QB1. This would prove to be the first of a new population, known as the Kuiper Belt, which had already been predicted by astronomers to exist at the edge of the Solar System.
Further investigation of the Kuiper Belt by the turn of the century would lead to additional discoveries. The discovery of Eris and other “plutoids” by Mike Brown, Chad Trujillo, David Rabinowitz and other astronomers would lead to the Great Planet Debate – where IAU policy and the convention for designating planets would be contested.
Structure and Composition:
At the core of the Solar System lies the Sun (a G2 main-sequence star) which is then surrounded by four terrestrial planets (the Inner Planets), the main Asteroid Belt, four gas giants (the Outer Planets), a massive field of small bodies that extends from 30 AU to 50 AU from the Sun (the Kuiper Belt). The system is then surrounded a spherical cloud of icy planetesimals (the Oort Cloud) that is believed to extend to a distance of 100,000 AU from the Sun into the Interstellar Medium.
The Sun contains 99.86% of the system’s known mass, and its gravity dominates the entire system. Most large objects in orbit around the Sun lie near the plane of Earth’s orbit (the ecliptic) and most planets and bodies rotate around it in the same direction (counter-clockwise when viewed from above Earth’s north pole). The planets are very close to the ecliptic, whereas comets and Kuiper belt objects are frequently at greater angles to it.
It’s four largest orbiting bodies (the gas giants) account for 99% of the remaining mass, with Jupiter and Saturn together comprising more than 90%. The remaining objects of the Solar System (including the four terrestrial planets, the dwarf planets, moons, asteroids, and comets) together comprise less than 0.002% of the Solar System’s total mass.

Astronomers sometimes informally divide this structure into separate regions. First, there is the Inner Solar System, which includes the four terrestrial planets and the Asteroid Belt. Beyond this, there’s the outer Solar System that includes the four gas giant planets. Meanwhile, there’s the outermost parts of the Solar System are considered a distinct region consisting of the objects beyond Neptune (i.e. Trans-Neptunian Objects).
Most of the planets in the Solar System possess secondary systems of their own, being orbited by planetary objects called natural satellites (or moons). In the case of the four giant planets, there are also planetary rings – thin bands of tiny particles that orbit them in unison. Most of the largest natural satellites are in synchronous rotation, with one face permanently turned toward their parent.
The Sun, which comprises nearly all the matter in the Solar System, is composed of roughly 98% hydrogen and helium. The terrestrial planets of the Inner Solar System are composed primarily of silicate rock, iron and nickel. Beyond the Asteroid Belt, planets are composed mainly of gases (such as hydrogen, helium) and ices – like water, methane, ammonia, hydrogen sulfide and carbon dioxide.
Objects farther from the Sun are composed largely of materials with lower melting points. Icy substances comprise the majority of the satellites of the giant planets, as well as most of Uranus and Neptune (hence why they are sometimes referred to as “ice giants”) and the numerous small objects that lie beyond Neptune’s orbit.
Together, gases and ices are referred to as volatiles. The boundary in the Solar System beyond which those volatile substances could condense is known as the frost line, which lies roughly 5 AU from the Sun. Within the Kuiper Belt, objects and planetesimals are composed mainly of these materials and rock.
Formation and Evolution:
The Solar System formed 4.568 billion years ago from the gravitational collapse of a region within a large molecular cloud composed of hydrogen, helium, and small amounts of heavier elements fused by previous generations of stars. As the region that would become the Solar System (known as the pre-solar nebula) collapsed, conservation of angular momentum caused it to rotate faster.
The center, where most of the mass collected, became increasingly hotter than the surrounding disc. As the contracting nebula rotated faster, it began to flatten into a protoplanetary disc with a hot, dense protostar at the center. The planets formed by accretion from this disc, in which dust and gas gravitated together and coalesced to form ever larger bodies.
Due to their higher boiling points, only metals and silicates could exist in solid form closer to the Sun, and these would eventually form the terrestrial planets of Mercury, Venus, Earth, and Mars. Because metallic elements only comprised a very small fraction of the solar nebula, the terrestrial planets could not grow very large.
In contrast, the giant planets (Jupiter, Saturn, Uranus, and Neptune) formed beyond the point between the orbits of Mars and Jupiter where material is cool enough for volatile icy compounds to remain solid (i.e. the frost line).
The ices that formed these planets were more plentiful than the metals and silicates that formed the terrestrial inner planets, allowing them to grow massive enough to capture large atmospheres of hydrogen and helium. Leftover debris that never became planets congregated in regions such as the asteroid belt, Kuiper belt, and Oort cloud.
Within 50 million years, the pressure and density of hydrogen in the center of the protostar became great enough for it to begin thermonuclear fusion. The temperature, reaction rate, pressure, and density increased until hydrostatic equilibrium was achieved.
At this point, the Sun became a main-sequence star. Solar wind from the Sun created the heliosphere and swept away the remaining gas and dust from the protoplanetary disc into interstellar space, ending the planetary formation process.
The Solar System will remain roughly as we know it today until the hydrogen in the core of the Sun has been entirely converted to helium. This will occur roughly 5 billion years from now and mark the end of the Sun’s main-sequence life. At this time, the core of the Sun will collapse, and the energy output will be much greater than at present.
The outer layers of the Sun will expand to roughly 260 times its current diameter, and the Sun will become a red giant. The expanding Sun is expected to vaporize Mercury and Venus and render Earth uninhabitable as the habitable zone moves out to the orbit of Mars. Eventually, the core will be hot enough for helium fusion and the Sun will burn helium for a time, after which nuclear reactions in the core will start to dwindle.
At this point, the Sun’s outer layers will move away into space, leaving a white dwarf – an extraordinarily dense object that will have half the original mass of the Sun, but will be the size of Earth. The ejected outer layers will form what is known as a planetary nebula, returning some of the material that formed the Sun to the interstellar medium.
Inner Solar System:
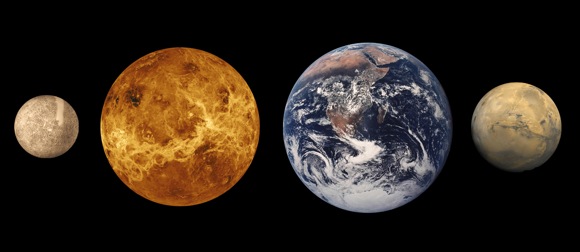
In the inner Solar System, we find the “Inner Planets” – Mercury, Venus, Earth, and Mars – which are so named because they orbit closest to the Sun. In addition to their proximity, these planets have a number of key differences that set them apart from planets elsewhere in the Solar System.
For starters, the inner planets are rocky and terrestrial, composed mostly of silicates and metals, whereas the outer planets are gas giants. The inner planets are also much more closely spaced than their outer Solar System counterparts. In fact, the radius of the entire region is less than the distance between the orbits of Jupiter and Saturn.
Generally, inner planets are smaller and denser than their counterparts, and have few to no moons or rings circling them. The outer planets, meanwhile, often have dozens of satellites and rings composed of particles of ice and rock.
The terrestrial inner planets are composed largely of refractory minerals such as the silicates, which form their crusts and mantles, and metals such as iron and nickel which form their cores. Three of the four inner planets (Venus, Earth and Mars) have atmospheres substantial enough to generate weather. All of them have impact craters and tectonic surface features as well, such as rift valleys and volcanoes.
Of the inner planets, Mercury is the closest to our Sun and the smallest of the terrestrial planets. Its magnetic field is only about 1% that of Earth’s, and it’s very thin atmosphere means that it is hot during the day (up to 430°C) and freezing at night (as low as -187 °C) because the atmosphere can neither keep heat in or out. It has no moons of its own and is comprised mostly of iron and nickel. Mercury is one of the densest planets in the Solar System.
Venus, which is about the same size as Earth, has a thick toxic atmosphere that traps heat, making it the hottest planet in the Solar System. This atmosphere is composed of 96% carbon dioxide, along with nitrogen and a few other gases. Dense clouds within Venus’ atmosphere are composed of sulphuric acid and other corrosive compounds, with very little water. Much of Venus’ surface is marked with volcanoes and deep canyons – the biggest of which is over 6400 km (4,000 mi) long.
Earth is the third inner planet and the one we know best. Of the four terrestrial planets, Earth is the largest, and the only one that currently has liquid water, which is necessary for life as we know it. Earth’s atmosphere protects the planet from dangerous radiation and helps keep valuable sunlight and warmth in, which is also essential for life to survive.
Like the other terrestrial planets, Earth has a rocky surface with mountains and canyons, and a heavy metal core. Earth’s atmosphere contains water vapor, which helps to moderate daily temperatures. Like Mercury, the Earth has an internal magnetic field. And our Moon, the only one we have, is comprised of a mixture of various rocks and minerals.

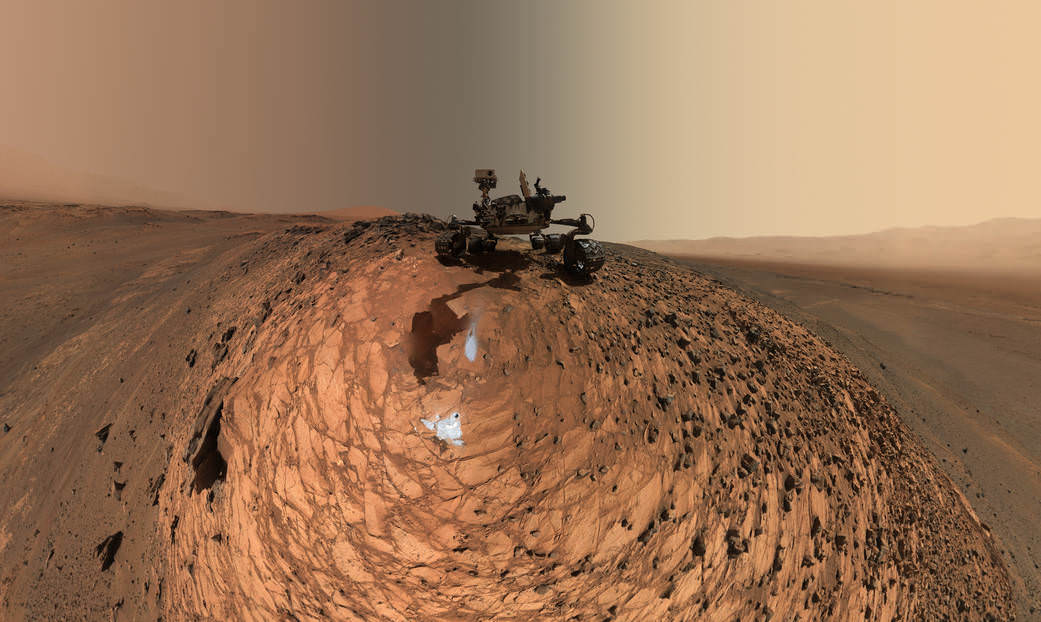
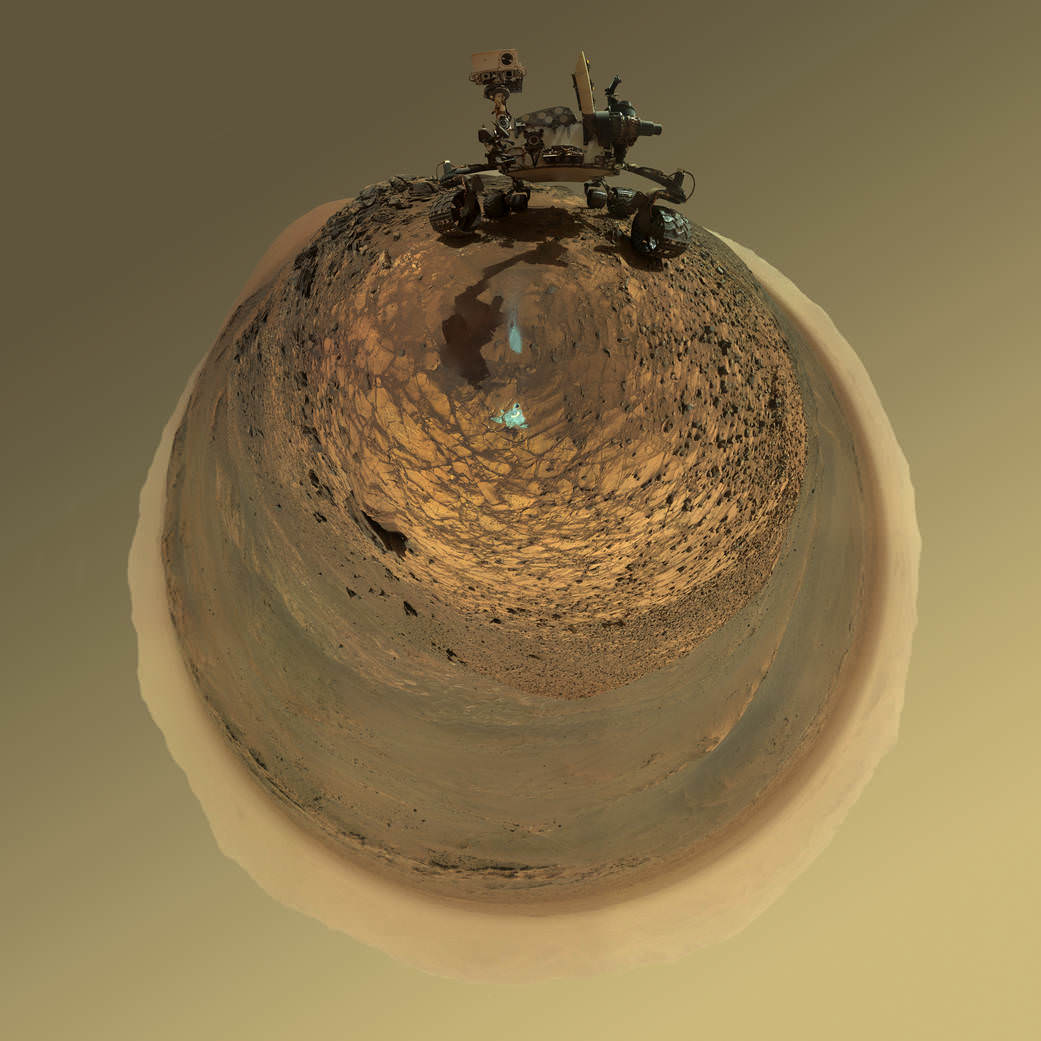
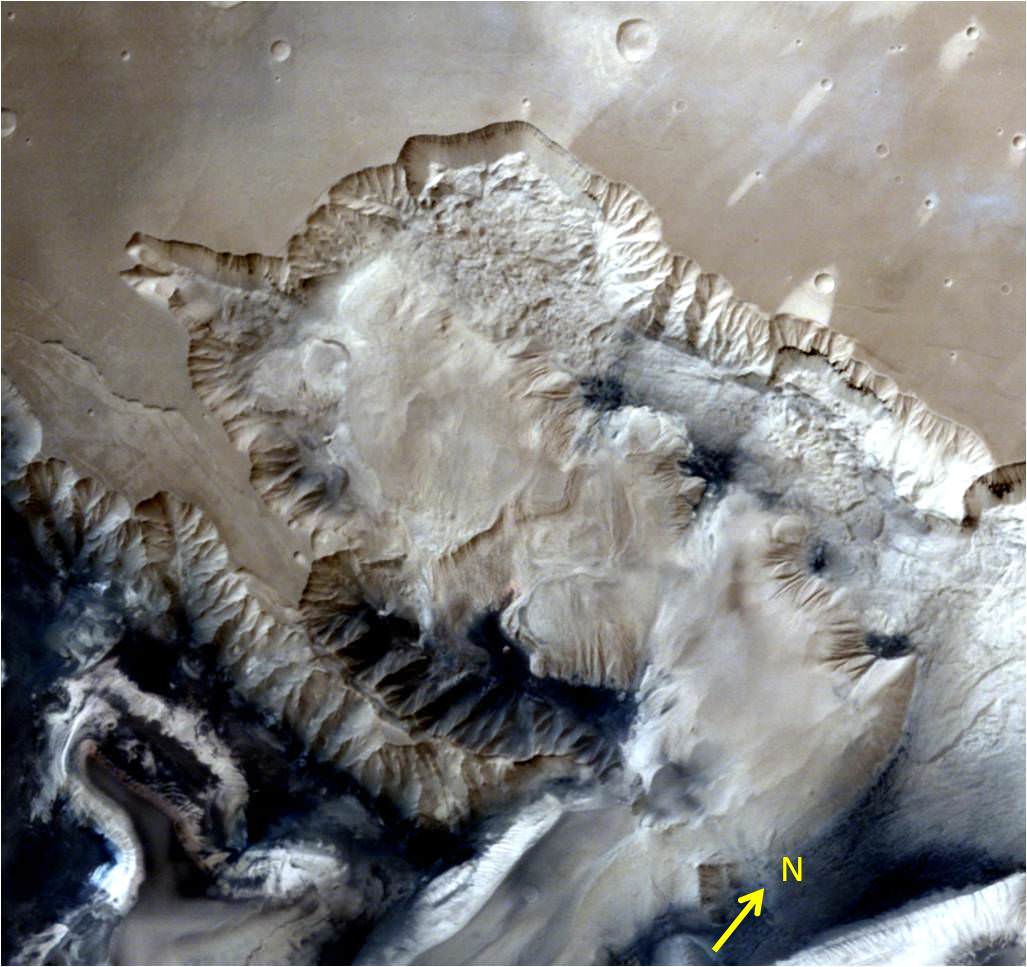
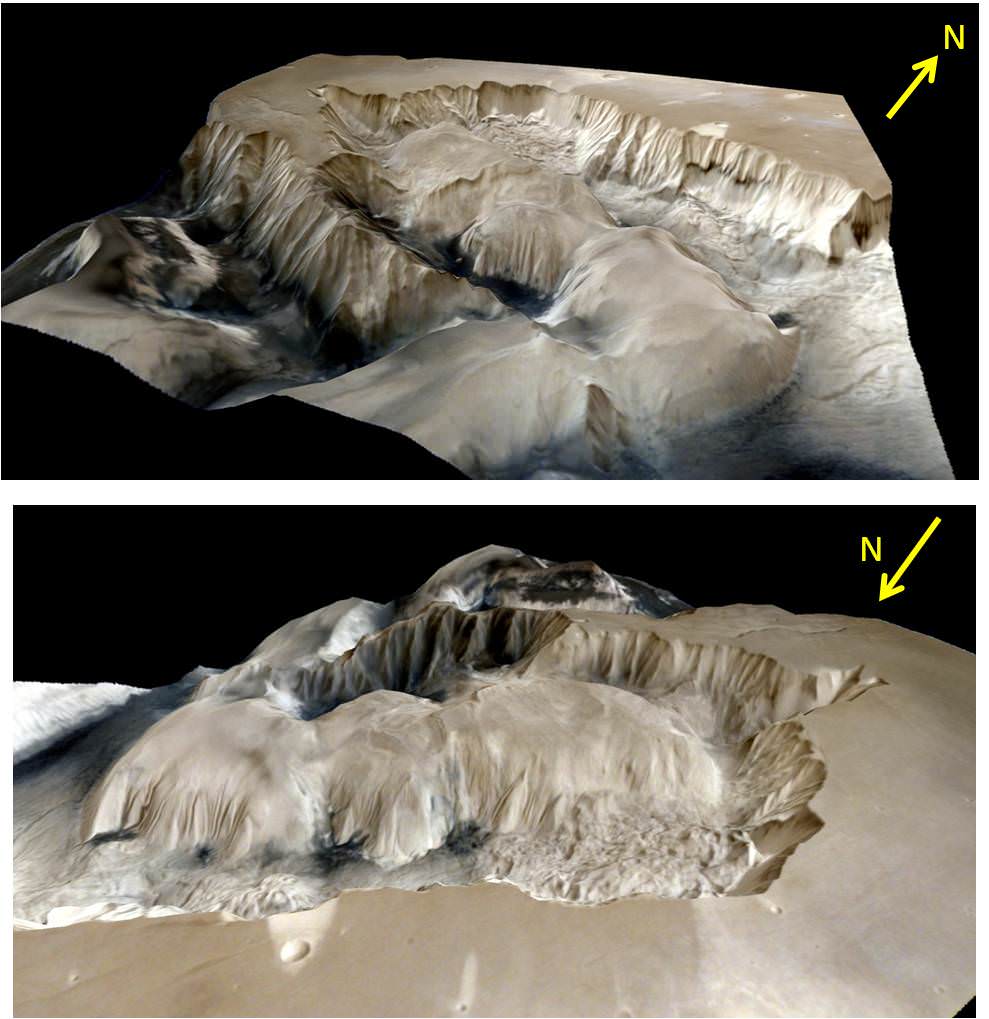
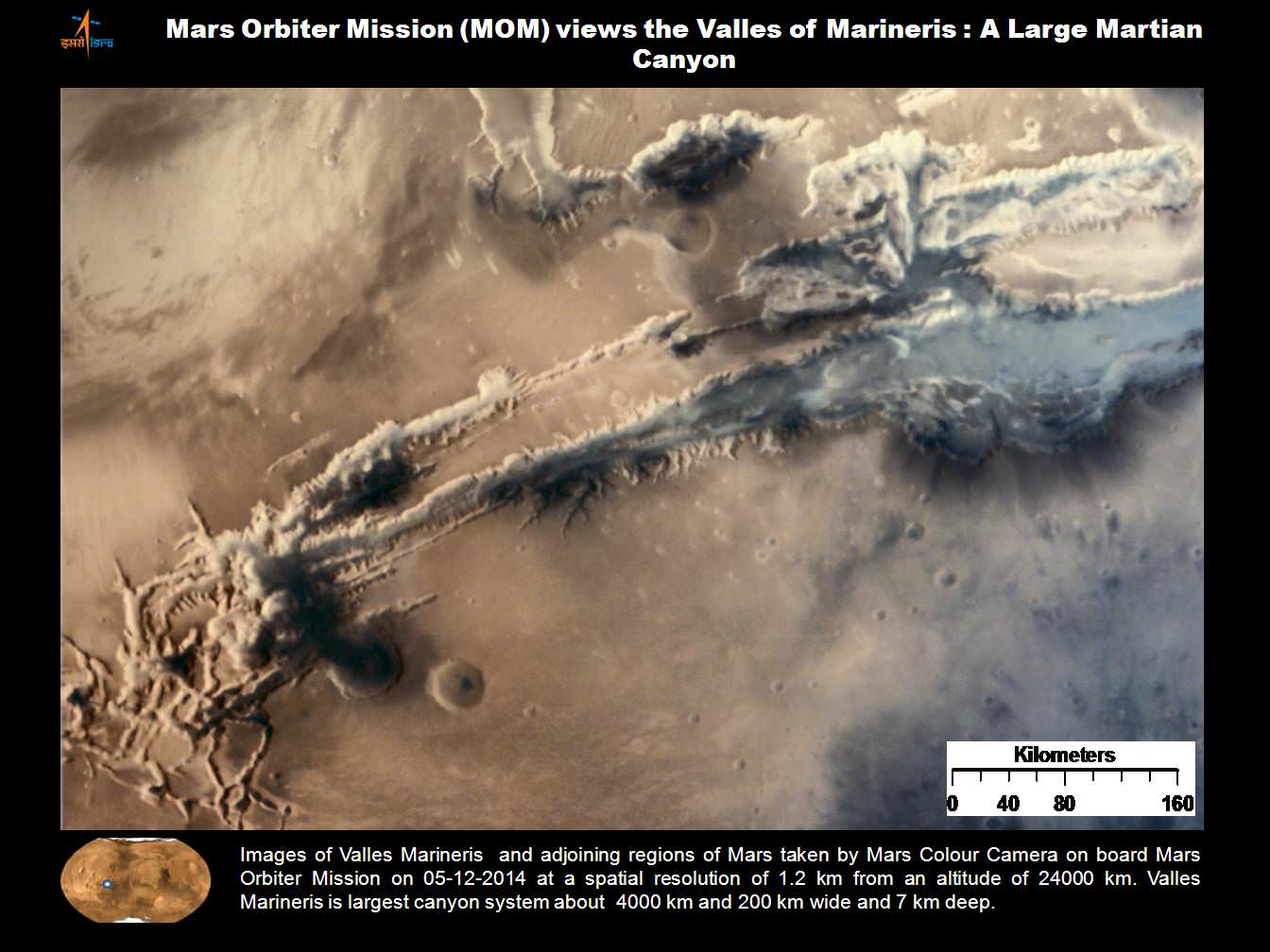
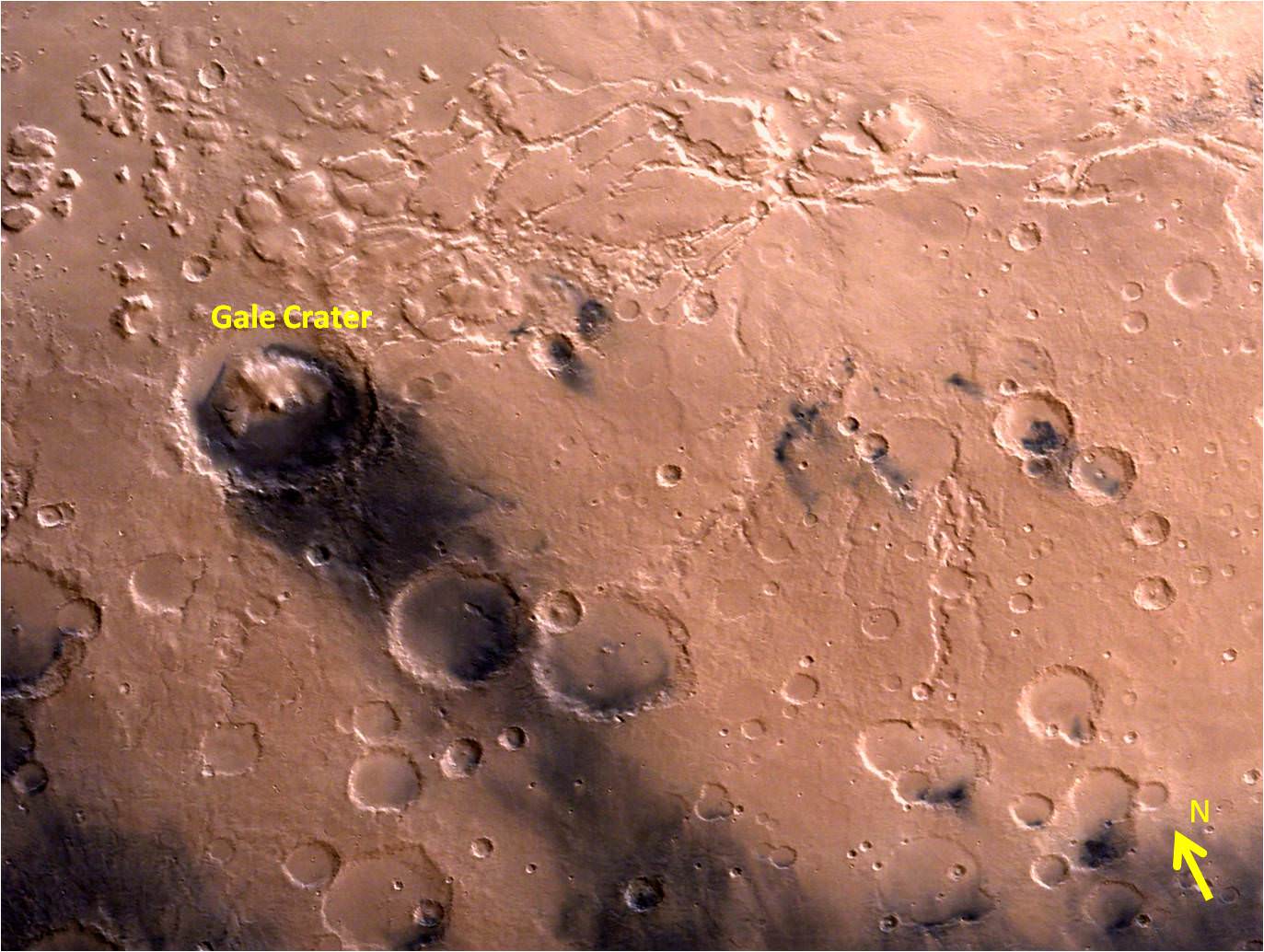
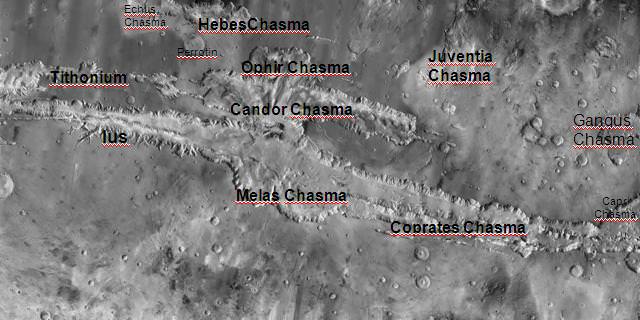
Mars is the fourth and final inner planet, and is also known as the “Red Planet” due to the oxidization of iron-rich materials that form the planet’s surface. Mars also has some of the most interesting terrain features of any of the terrestrial planets. These include the largest mountain in the Solar System (Olympus Mons) which rises some 21,229 m (69,649 ft) above the surface, and a giant canyon called Valles Marineris – which is 4000 km (2500 mi) long and reaches depths of up to 7 km (4 mi).
Much of Mars’ surface is very old and filled with craters, but there are geologically newer areas of the planet as well. At the Martian poles are polar ice caps that shrink in size during the Martian spring and summer. Mars is less dense than Earth and has a smaller magnetic field, which is indicative of a solid core, rather than a liquid one.
Mars’ thin atmosphere has led some astronomers to believe that the surface water that once existed there might have actually taken liquid form, but has since evaporated into space. The planet has two small moons called Phobos and Deimos.
Outer Solar System:
The outer planets (sometimes called Jovian planets or gas giants) are huge planets swaddled in gas that have rings and plenty of moons. Despite their size, only two of them are visible without telescopes: Jupiter and Saturn. Uranus and Neptune were the first planets discovered since antiquity, and showed astronomers that the solar system was bigger than previously thought.

Jupiter is the largest planet in our Solar System and spins very rapidly (10 Earth hours) relative to its orbit of the sun (12 Earth years). Its thick atmosphere is mostly made up of hydrogen and helium, perhaps surrounding a terrestrial core that is about Earth’s size. The planet has dozens of moons, some faint rings and a Great Red Spot – a raging storm that has happening for the past 400 years at least.
Saturn is best known for its prominent ring system – seven known rings with well-defined divisions and gaps between them. How the rings got there is one subject under investigation. It also has dozens of moons. Its atmosphere is mostly hydrogen and helium, and it also rotates quickly (10.7 Earth hours) relative to its time to circle the Sun (29 Earth years).
Uranus was first discovered by William Herschel in 1781. The planet’s day takes about 17 Earth hours and one orbit around the Sun takes 84 Earth years. Its mass contains water, methane, ammonia, hydrogen and helium surrounding a rocky core. It has dozens of moons and a faint ring system. The only spacecraft to visit this planet was the Voyager 2 spacecraft in 1986.
Neptune is a distant planet that contains water, ammmonia, methane, hydrogen and helium and a possible Earth-sized core. It has more than a dozen moons and six rings. NASA’s Voyager 2 spacecraft also visited this planet and its system by 1989 during its transit of the outer Solar System.

Trans-Neptunian Region:
There have been more than a thousand objects discovered in the Kuiper Belt, and it’s theorized that there are as many as 100,000 objects larger than 100 km in diameter. Given to their small size and extreme distance from Earth, the chemical makeup of KBOs is very difficult to determine.
However, spectrographic studies conducted of the region since its discovery have generally indicated that its members are primarily composed of ices: a mixture of light hydrocarbons (such as methane), ammonia, and water ice – a composition they share with comets. Initial studies also confirmed a broad range of colors among KBOs, ranging from neutral grey to deep red.
This suggests that their surfaces are composed of a wide range of compounds, from dirty ices to hydrocarbons. In 1996, Robert H. Brown et al. obtained spectroscopic data on the KBO 1993 SC, revealing its surface composition to be markedly similar to that of Pluto (as well as Neptune’s moon Triton) in that it possessed large amounts of methane ice.
Water ice has been detected in several KBOs, including 1996 TO66, 38628 Huya and 20000 Varuna. In 2004, Mike Brown et al. determined the existence of crystalline water ice and ammonia hydrate on one of the largest known KBOs, 50000 Quaoar. Both of these substances would have been destroyed over the age of the Solar System, suggesting that Quaoar had been recently resurfaced, either by internal tectonic activity or by meteorite impacts.
Keeping Pluto company out in the Kuiper belt are many other objects worthy of mention. Quaoar, Makemake, Haumea, Orcus and Eris are all large icy bodies in the Belt and several of them even have moons of their own. These are all tremendously far away, and yet, very much within reach.
Oort Cloud and Farthest Regions:
The Oort Cloud is thought to extend from between 2,000 and 5,000 AU (0.03 and 0.08 ly) to as far as 50,000 AU (0.79 ly) from the Sun, though some estimates place the outer edge as far as 100,000 and 200,000 AU (1.58 and 3.16 ly). The Cloud is thought to be comprised of two regions – a spherical outer Oort Cloud of 20,000 – 50,000 AU (0.32 – 0.79 ly), and disc-shaped inner Oort (or Hills) Cloud of 2,000 – 20,000 AU (0.03 – 0.32 ly).
The outer Oort cloud may have trillions of objects larger than 1 km (0.62 mi), and billions that measure 20 kilometers (12 mi) in diameter. Its total mass is not known, but – assuming that Halley’s Comet is a typical representation of outer Oort Cloud objects – it has the combined mass of roughly 3×1025 kilograms (6.6×1025 pounds), or five Earths.

Based on the analyses of past comets, the vast majority of Oort Cloud objects are composed of icy volatiles – such as water, methane, ethane, carbon monoxide, hydrogen cyanide, and ammonia. The appearance of asteroids thought to be originating from the Oort Cloud has also prompted theoretical research that suggests that the population consists of 1-2% asteroids.
Earlier estimates placed its mass up to 380 Earth masses, but improved knowledge of the size distribution of long-period comets has led to lower estimates. The mass of the inner Oort Cloud, meanwhile, has yet to be characterized. The contents of both Kuiper Belt and the Oort Cloud are known as Trans-Neptunian Objects (TNOs), because the objects of both regions have orbits that that are further from the Sun than Neptune’s orbit.
Exploration:
Our knowledge of the Solar System also benefited immensely from the advent of robotic spacecraft, satellites, and robotic landers. Beginning in the mid-20th century, in what was known as “The Space Age“, manned and robotic spacecraft began exploring planets, asteroids and comets in the Inner and Outer Solar System.
All planets in the Solar System have now been visited to varying degrees by spacecraft launched from Earth. Through these unmanned missions, humans have been able to get close-up photographs of all the planets. In the case of landers and rovers, tests have been performed on the soils and atmospheres of some.
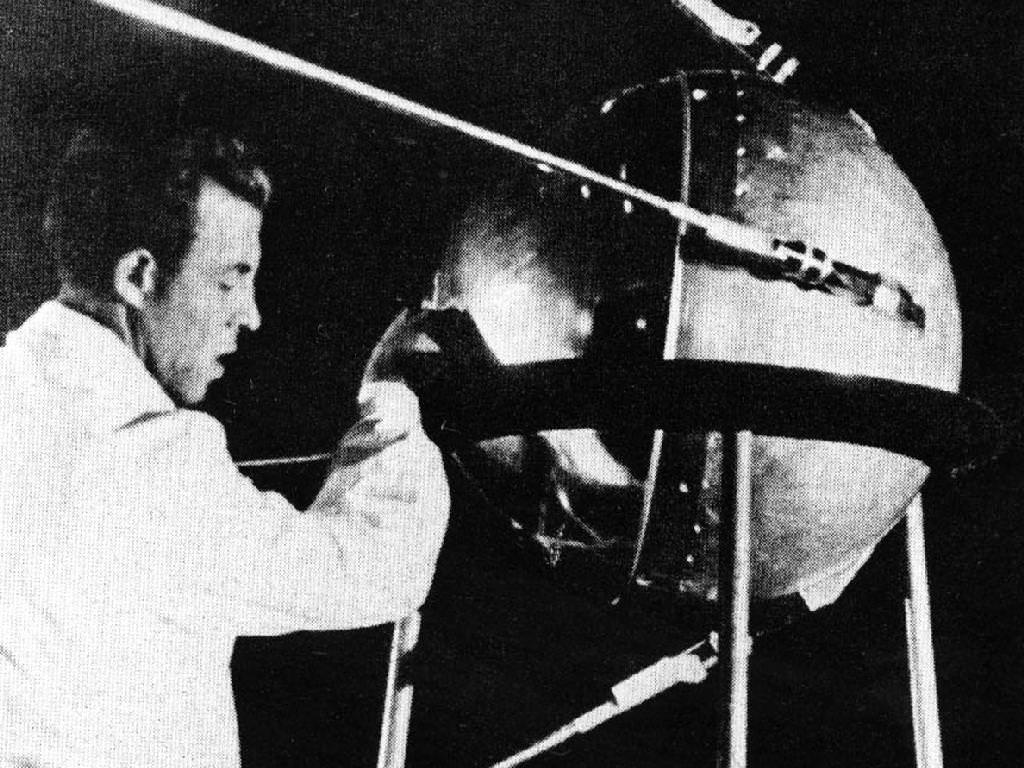
The first artificial object sent into space was the Soviet satellite Sputnik 1, which was launched in space in 1957, successfully orbited the Earth for months, and collected information on the density of the upper atmosphere and the ionosphere. The American probe Explorer 6, launched in 1959, was the first satellite to capture images of the Earth from space.
Robotic spacecraft conducting flybys also revealed considerable information about the planet’s atmospheres, geological and surface features. The first successful probe to fly by another planet was the Soviet Luna 1 probe, which sped past the Moon in 1959. The Mariner program resulted in multiple successful planetary flybys, consisting of the Mariner 2 mission past Venus in 1962, the Mariner 4 mission past Mars in 1965, and the Mariner 10 mission past Mercury in 1974.
By the 1970’s, probes were being dispatched to the outer planets as well, beginning with the Pioneer 10 mission which flew past Jupiter in 1973 and the Pioneer 11 visit to Saturn in 1979. The Voyager probes performed a grand tour of the outer planets following their launch in 1977, with both probes passing Jupiter in 1979 and Saturn in 1980-1981. Voyager 2 then went on to make close approaches to Uranus in 1986 and Neptune in 1989.
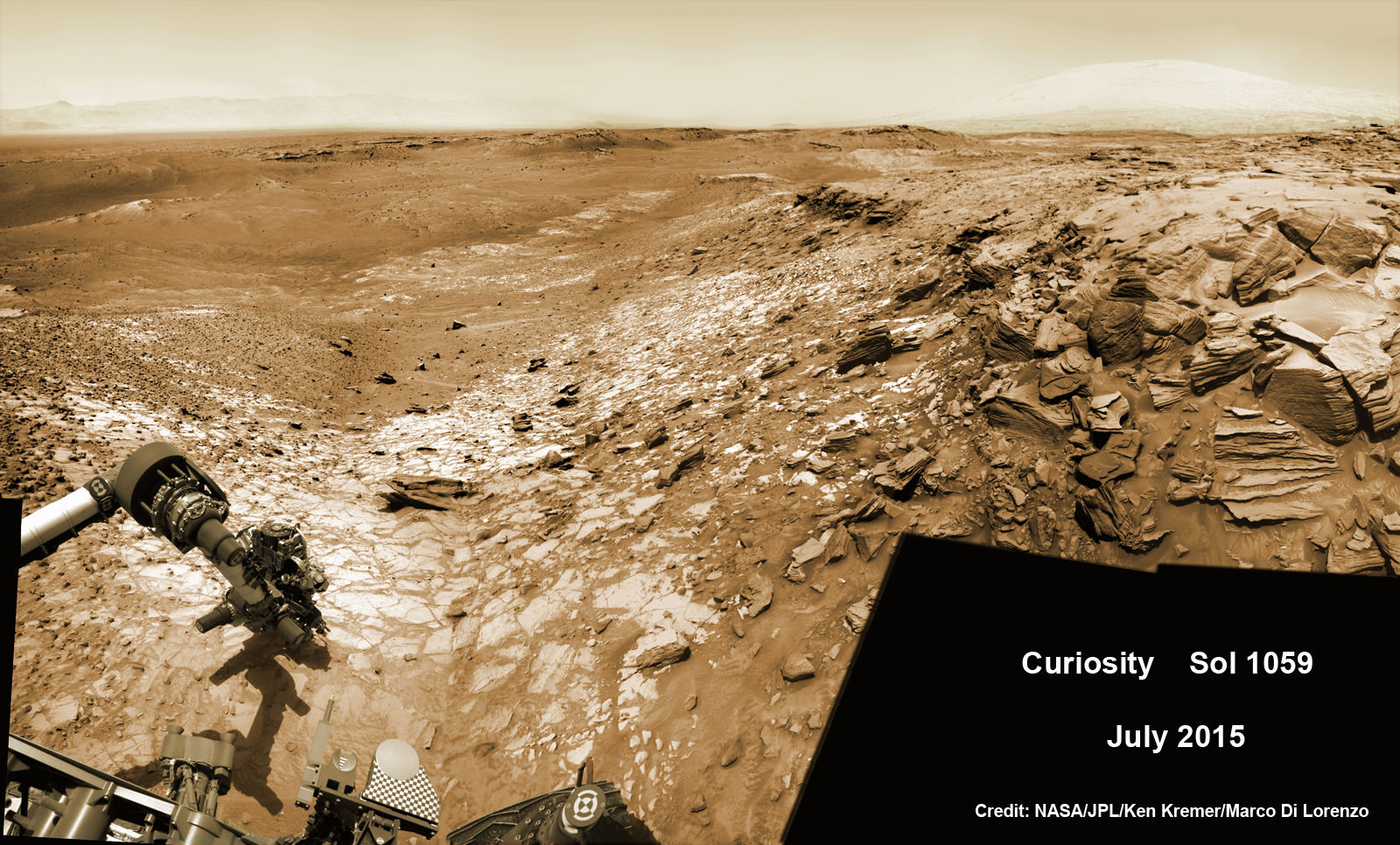
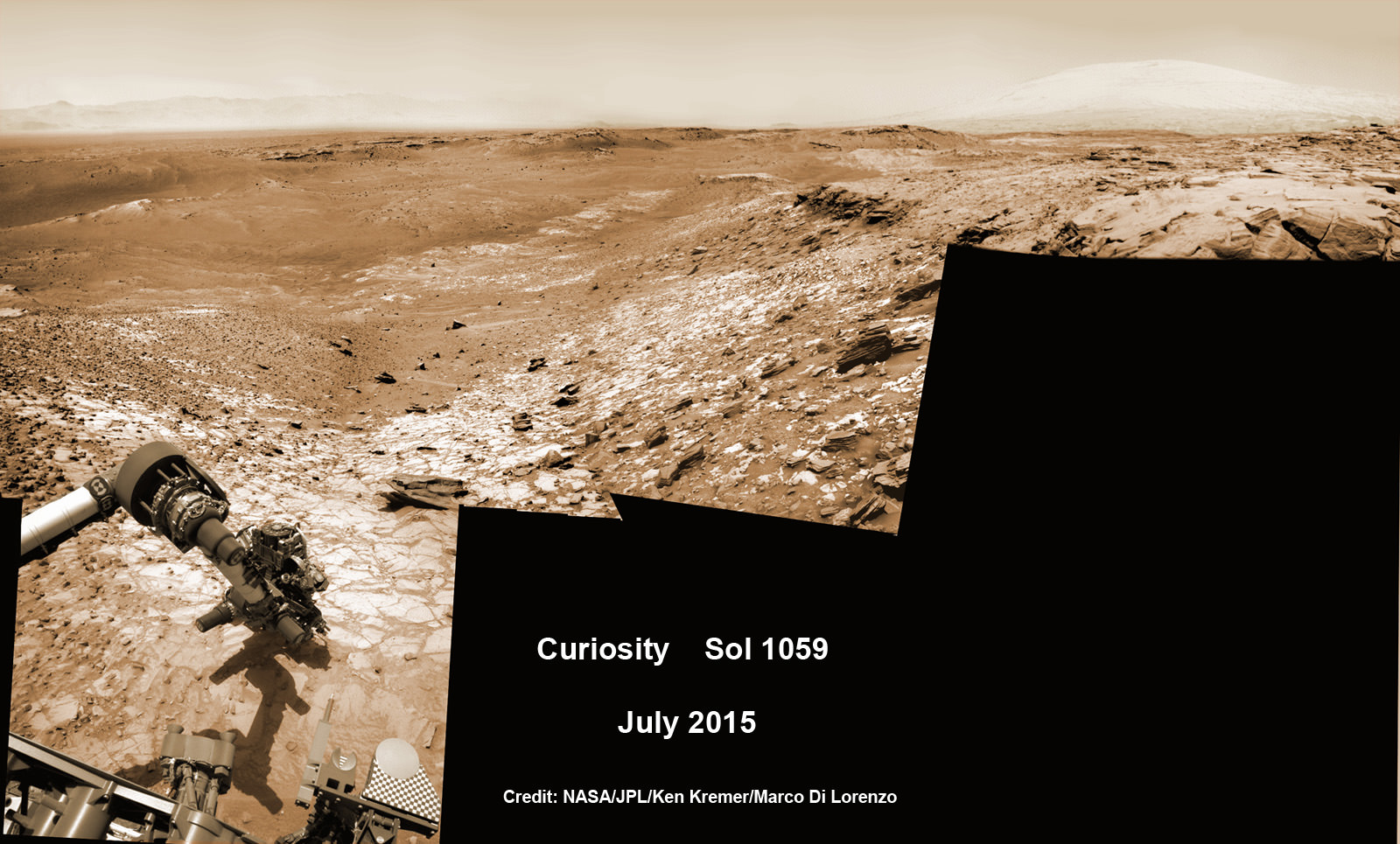
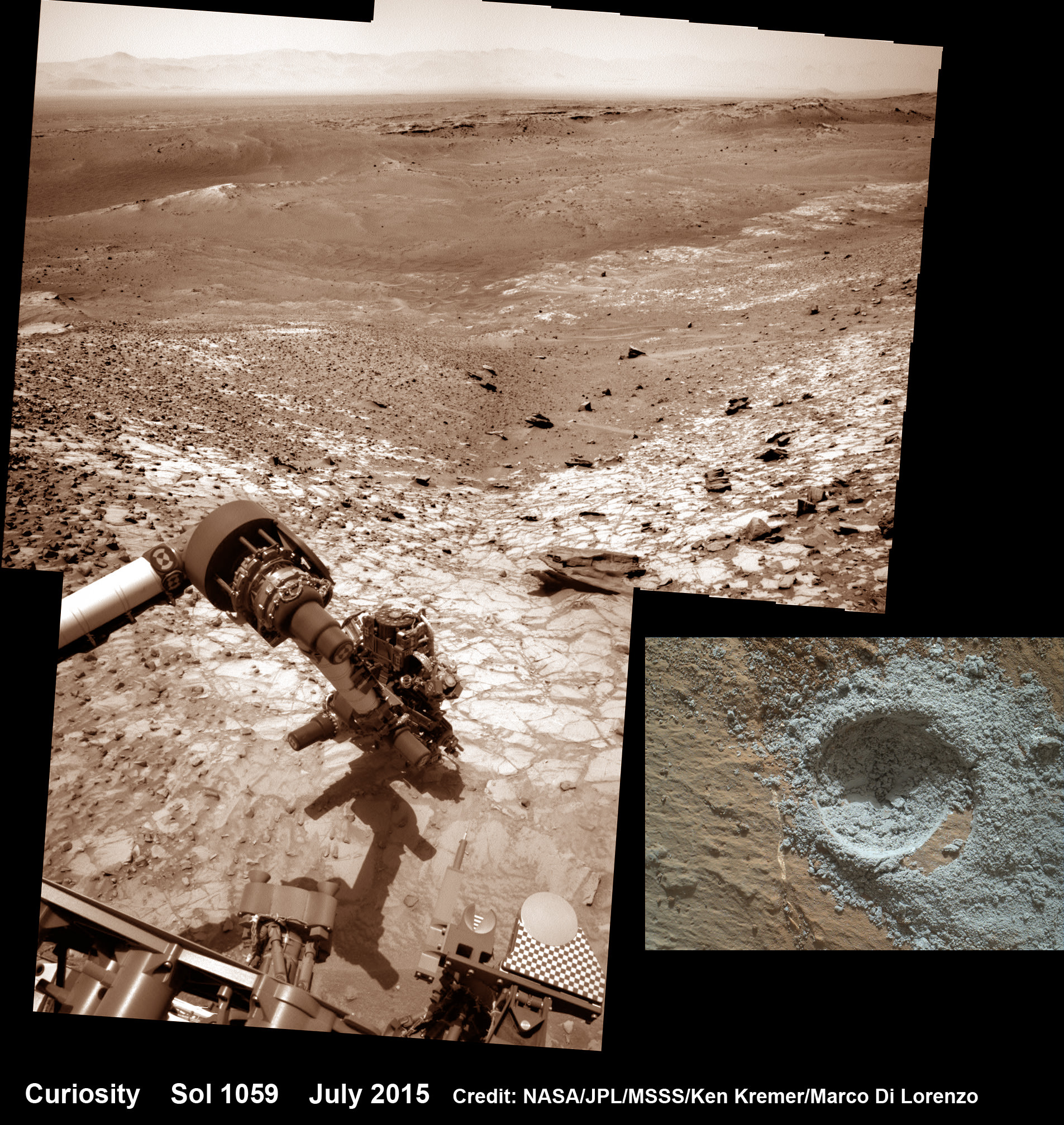
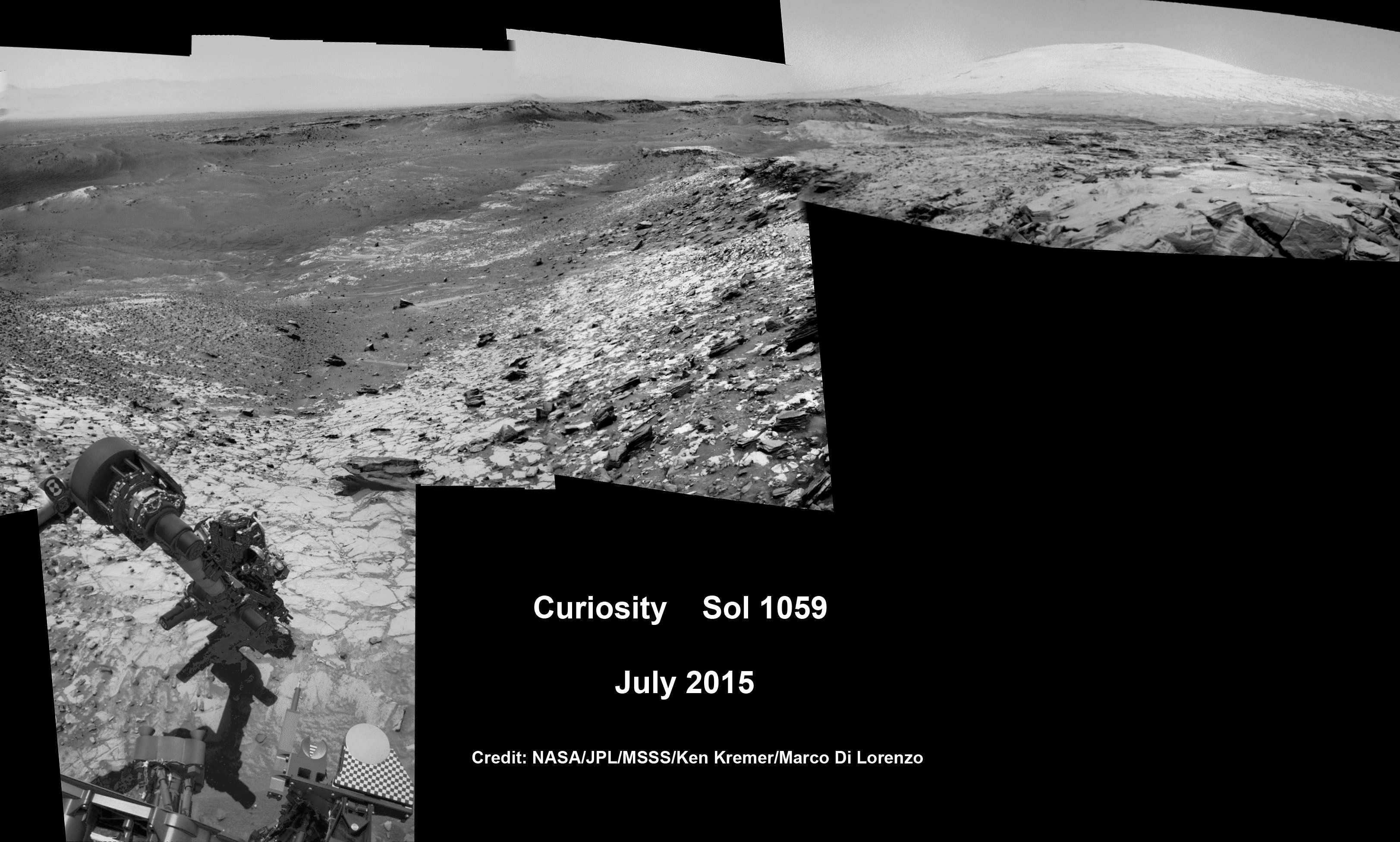
Launched on January 19th, 2006, the New Horizons probe is the first man-made spacecraft to explore the Kuiper Belt. This unmanned mission flew by Pluto in July 2015. Should it prove feasible, the mission will also be extended to observe a number of other Kuiper Belt Objects (KBOs) in the coming years.
Orbiters, rovers, and landers began being deployed to other planets in the Solar System by the 1960’s. The first was the Soviet Luna 10 satellite, which was sent into lunar orbit in 1966. This was followed in 1971 with the deployment of the Mariner 9 space probe, which orbited Mars, and the Soviet Venera 9 which orbited Venus in 1975.
The Galileo probe became the first artificial satellite to orbit an outer planet when it reached Jupiter in 1995, followed by the Cassini–Huygens probe orbiting Saturn in 2004. Mercury and Vesta were explored by 2011 by the MESSENGER and Dawn probes, respectively, with Dawn establishing orbit around the asteroid/dwarf planet Ceres in 2015.
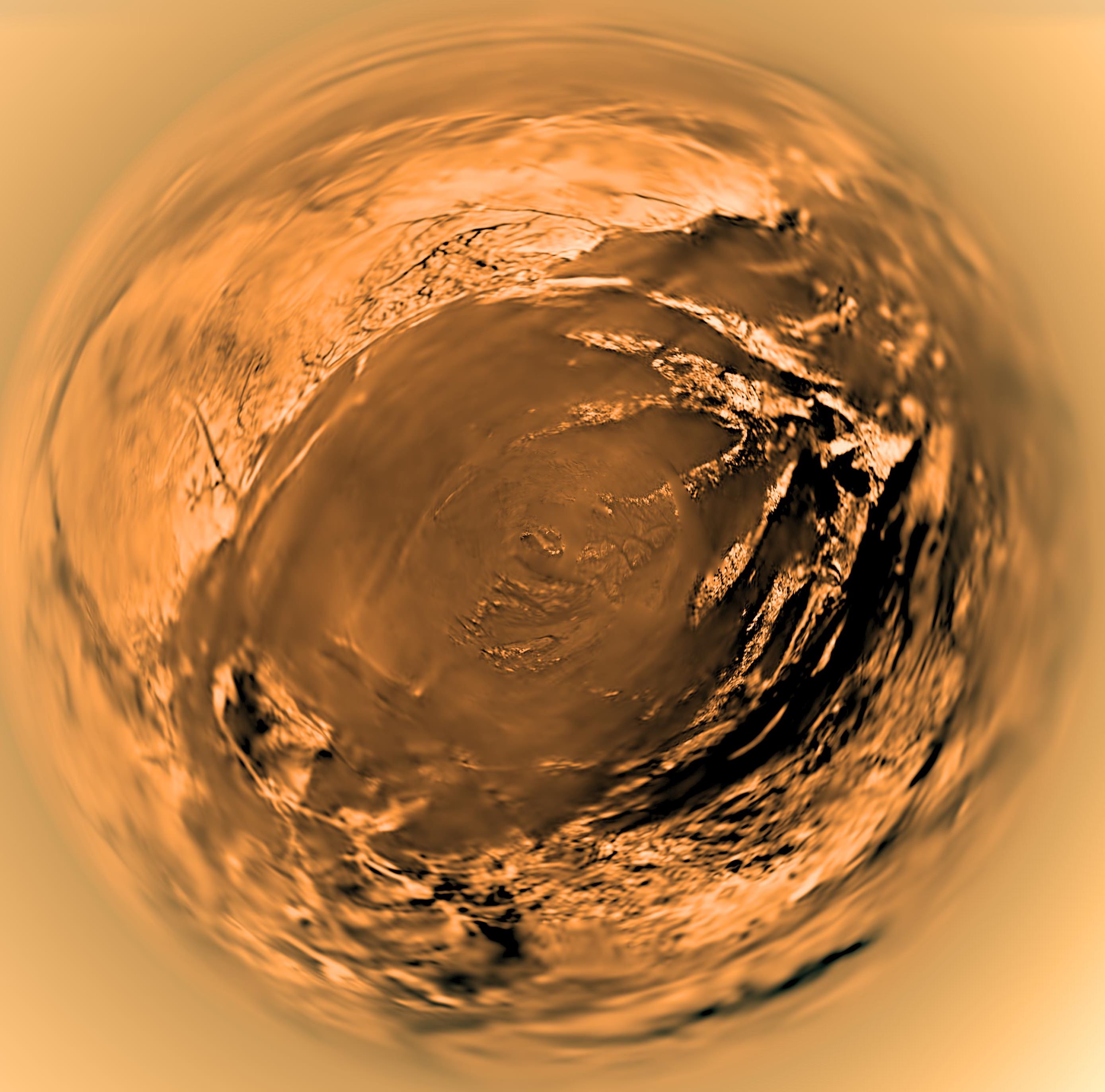
The first probe to land on another Solar System body was the Soviet Luna 2 probe, which impacted the Moon in 1959. Since then, probes have landed on or impacted on the surfaces of Venus in 1966 (Venera 3), Mars in 1971 (Mars 3 and Viking 1 in 1976), the asteroid 433 Eros in 2001 (NEAR Shoemaker), and Saturn’s moon Titan (Huygens) and the comet Tempel 1 (Deep Impact) in 2005.
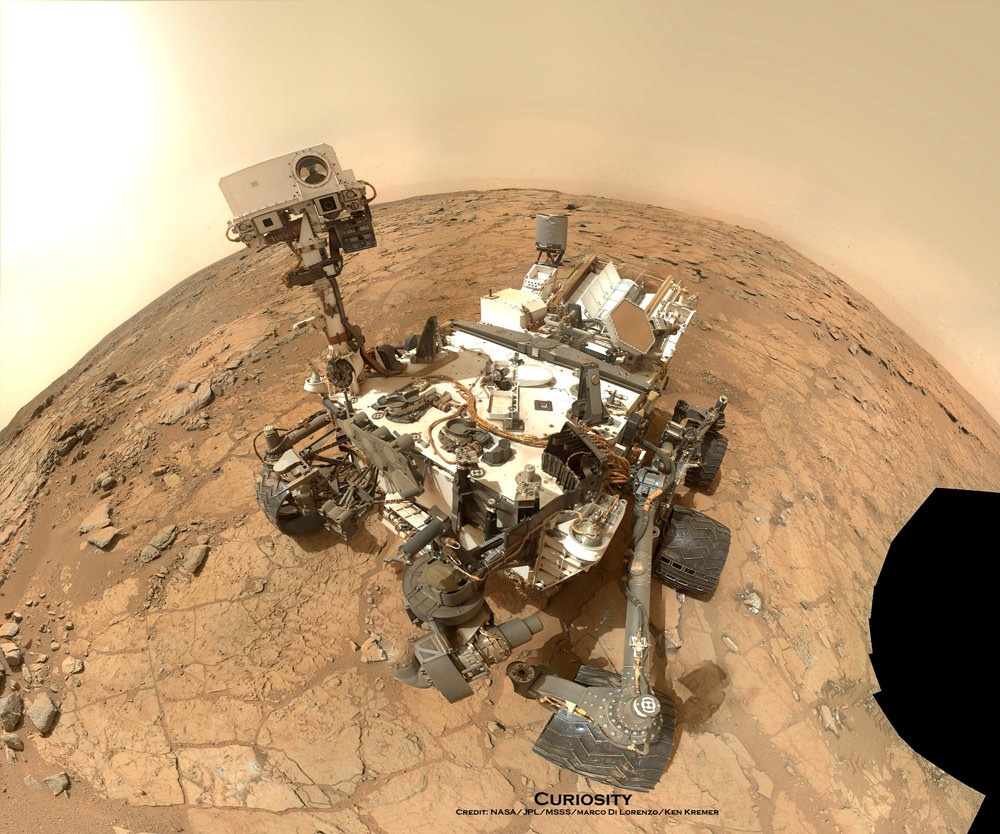
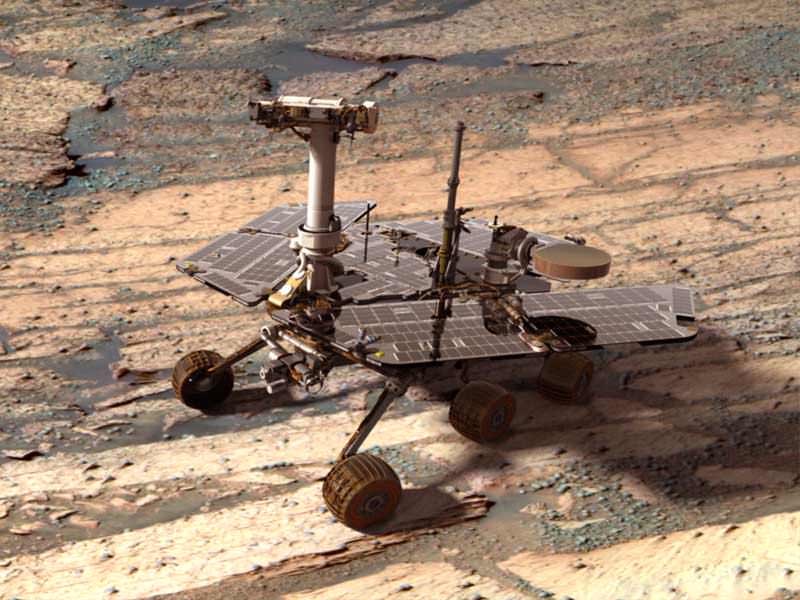
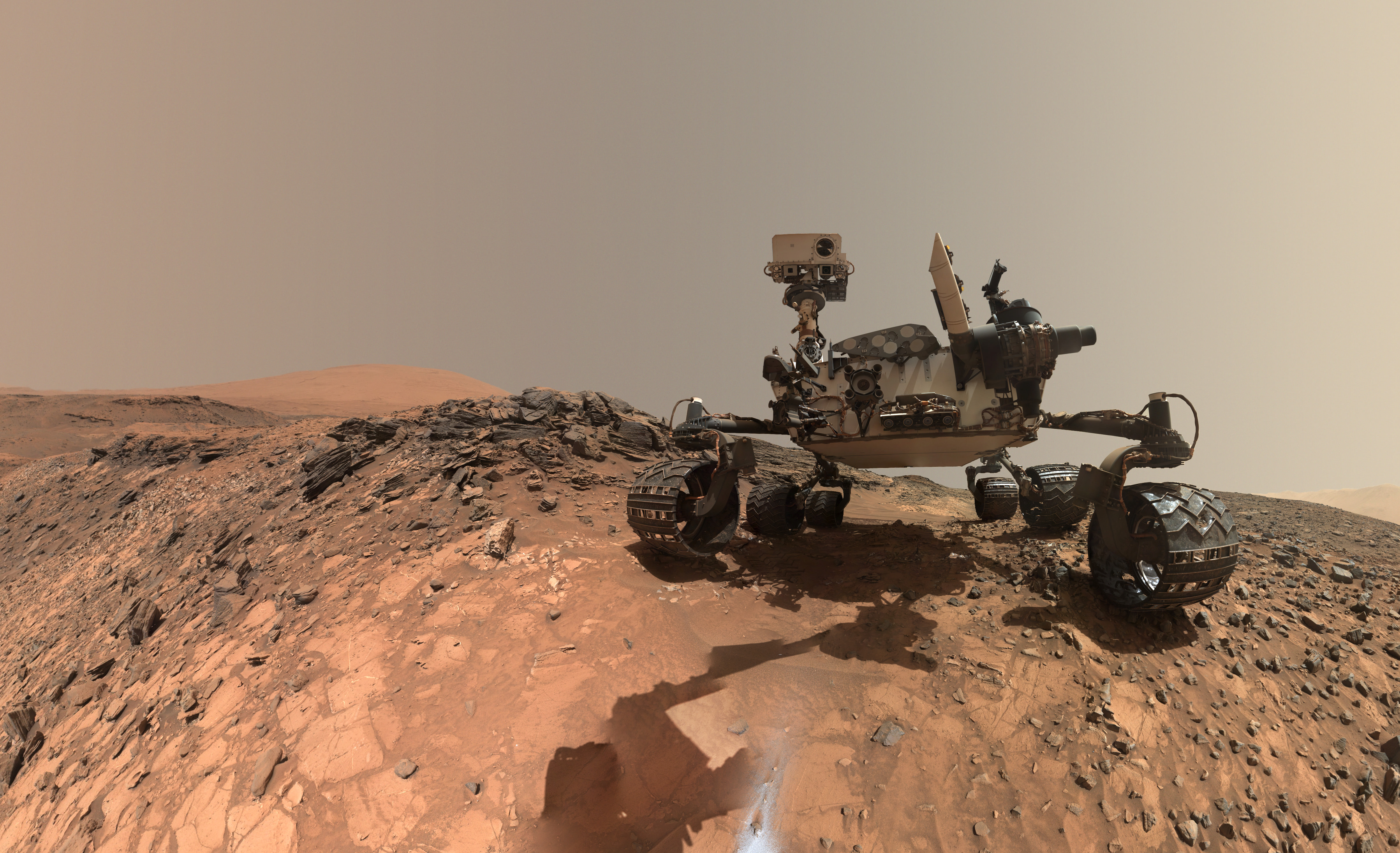
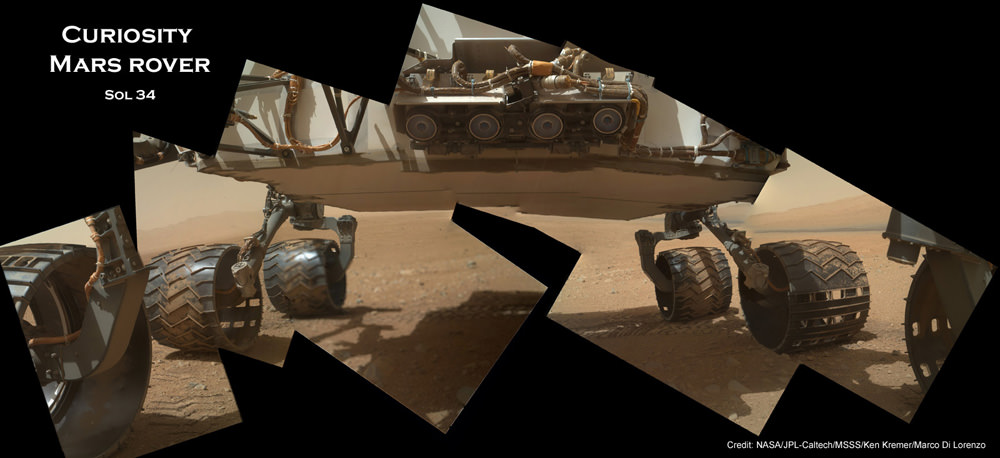
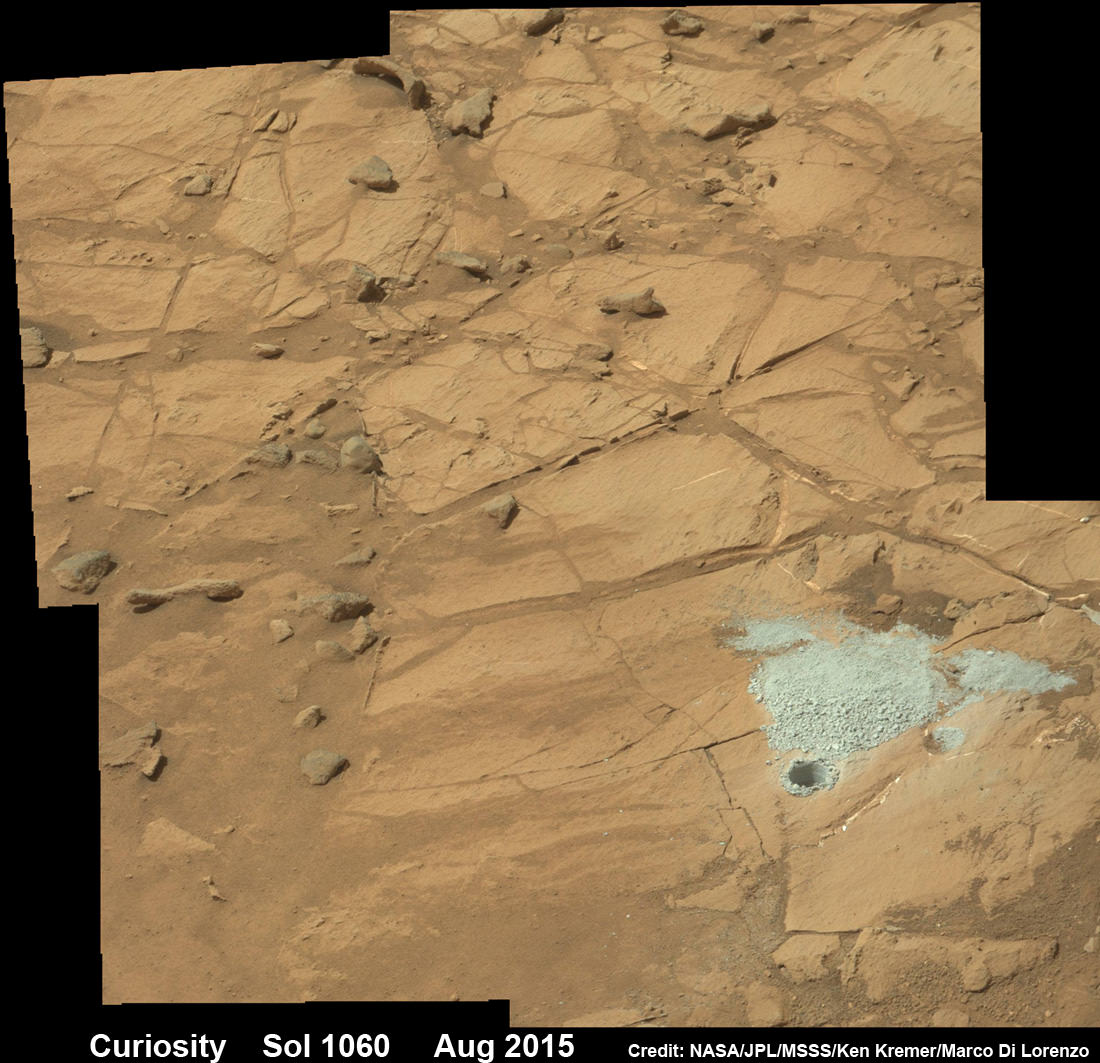
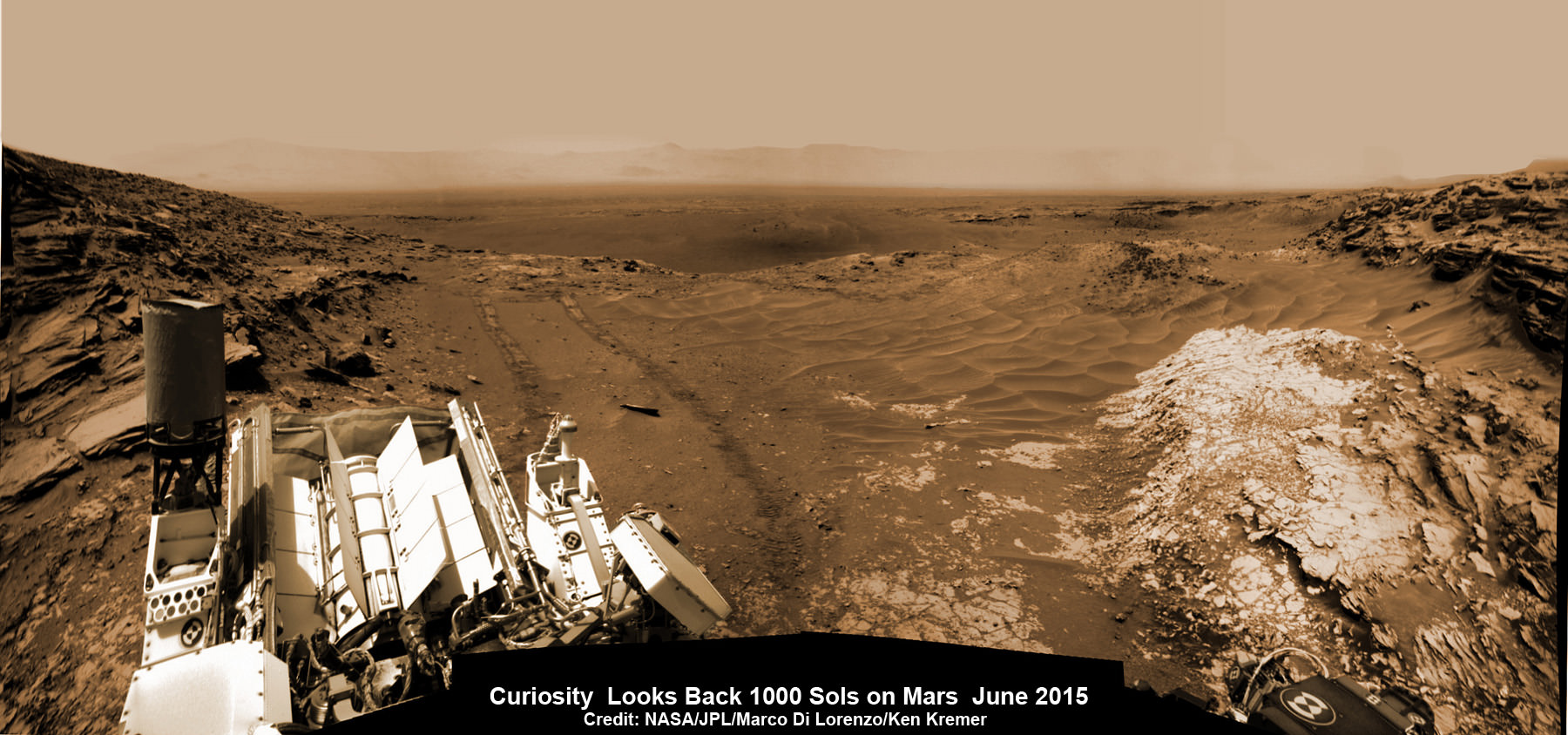
To date, only two worlds in the Solar System, the Moon and Mars, have been visited by mobile rovers. The first robotic rover to land on another planet was the Soviet Lunokhod 1, which landed on the Moon in 1970. The first to visit another planet was Sojourner, which traveled 500 meters across the surface of Mars in 1997, followed by Spirit (2004), Opportunity (2004), and Curiosity (2012).
Manned missions into space began in earnest in the 1950’s, and was a major focal point for both the United States and Soviet Union during the “Space Race“. For the Soviets, this took the form of the Vostok program, which involved sending manned space capsules into orbit.
The first mission – Vostok 1 – took place on April 12th, 1961, and was piloted by Soviet cosmonaut Yuri Gagarin (the first human being to go into space). On June 6th, 1963, the Soviets also sent the first woman – Valentina Tereshvoka – into space as part of the Vostok 6 mission.
In the US, Project Mercury was initiated with the same goal of placing a crewed capsule into orbit. On May 5th, 1961, astronaut Alan Shepard went into space aboard the Freedom 7 mission and became the first American (and second human) to go into space.
After the Vostok and Mercury programs were completed, the focus of both nations and space programs shifted towards the development of two and three-person spacecraft, as well as the development of long-duration spaceflights and extra-vehicular activity (EVA).

This took the form of the Voshkod and Gemini programs in the Soviet Union and US, respectively. For the Soviets, this involved developing a two to three-person capsule, whereas the Gemini program focused on developing the support and expertise needed for an eventual manned mission to the Moon.
These latter efforts culminated on July 21st, 1969 with the Apollo 11 mission, when astronauts Neil Armstrong and Buzz Aldrin became the first men to walk on the Moon. As part of the Apollo program, five more Moon landings would take place through 1972, and the program itself resulted in many scientific packages being deployed on the Lunar surface, and samples of moon rocks being returned to Earth.
After the Moon Landing took place, the focus of the US and Soviet space programs then began to shift to the development of space stations and reusable spacecraft. For the Soviets, this resulted in the first crewed orbital space stations dedicated to scientific research and military reconnaissance – known as the Salyut and Almaz space stations.
The first orbital space station to host more than one crew was NASA’s Skylab, which successfully held three crews from 1973 to 1974. The first true human settlement in space was the Soviet space station Mir, which was continuously occupied for close to ten years, from 1989 to 1999. It was decommissioned in 2001, and its successor, the International Space Station, has maintained a continuous human presence in space since then.

The United States’ Space Shuttle, which debuted in 1981, became the only reusable spacecraft to successfully make multiple orbital flights. The five shuttles that were built (Atlantis, Endeavour, Discovery, Challenger, Columbia and Enterprise) flew a total of 121 missions before being decommissioned in 2011.
During their history of service, two of the craft were destroyed in accidents. These included the Space Shuttle Challenger – which exploded upon take-off on Jan. 28th, 1986 – and the Space Shuttle Columbia which disintegrated during re-entry on Feb. 1st, 2003.
In 2004, then-U.S. President George W. Bush announced the Vision for Space Exploration, which called for a replacement for the aging Shuttle, a return to the Moon and, ultimately, a manned mission to Mars. These goals have since been maintained by the Obama administration, and now include plans for an Asteroid Redirect mission, where a robotic craft will tow an asteroid closer to Earth so a manned mission can be mounted to it.
All the information gained from manned and robotic missions about the geological phenomena of other planets – such as mountains and craters – as well as their seasonal, meteorological phenomena (i.e. clouds, dust storms and ice caps) have led to the realization that other planets experience much the same phenomena as Earth. In addition, it has also helped scientists to learn much about the history of the Solar System and its formation.
As our exploration of the Inner and Outer Solar System has improved and expanded, our conventions for categorizing planets has also changed. Our current model of the Solar System includes eight planets (four terrestrial, four gas giants), four dwarf planets, and a growing number of Trans-Neptunian Objects that have yet to be designated. It also contains and is surrounded by countless asteroids and planetesimals.
Given its sheer size, composition and complexity, researching our Solar System in full detail would take an entire lifetime. Obviously, no one has that kind of time to dedicate to the topic, so we have decided to compile the many articles we have about it here on Universe Today in one simple page of links for your convenience.
There are thousands of facts about the solar system in the links below. Enjoy your research.
The Solar System:
- Interesting Facts About the Solar System
- Our Solar System
- What is the Solar System?
- How Big is the Solar System?
- Diameter of the Solar System
- Solar System Orbits
- How Old is the Solar System?
- Stars and Planets
- All About Planets
- Inner Solar System
- Beyond the Solar System
- Solar System, Galaxy, Universe
- Diagram of the Solar System
- New Solar System
- Solar System Order
- Oort Cloud
- Interplanetary Space
- Plane of the Ecliptic
- Planetesimals
- Deep Space
- Protoplanets
- Planetoid
- Nemesis
Theories about the Solar System:
- Formation of the Solar System
- How Was the Solar System Formed?
- Origin of the Solar System
- Solar Nebula
- Solar Disruption Theory
- Solar Nebula Theory
- Geocentric Theory
- Geocentric Model
- Heliocentric Model
- Difference Between Geocentric and Heliocentric
Moons:
Anything EXTREME!:
- How Many Stars are in the Solar System?
- Largest Volcano in the Solar System
- What is the Largest Moon in the Solar System?
- What is the Smallest Moon in the Solar System?
- Largest in the Solar System
Solar System Stuffs: