The full Moon in this sequence was captured at the Cape Espichel lighthouse near Cabo Espichel, Sesimbra, Portugal on March 16, 2014. Credit and copyright: Miguel Claro.
The March full Moon, sometimes called the “Worm Moon” for signaling the coming of spring in the northern hemisphere. This artistically stunning image taken by astrophotopher Miguel Claro is a sequence of 93 images taken at 2-minute intervals as the Moon traveled across the sky and past the Cape Espichel lighthouse near Sesimbra, Portugal. Miguel tells us that the lighthouse originally opened in 1790, and by 1865 it was powered by olive oil, changing to regular fuel in 1886, and much later by electricity by about 1926. The lighthouse measures 32 meters high and lies at an altitude of 168m above the see level. Presently, its luminous range is 20 nautical miles, about 38 km out to sea on a clear night.
Miguel used a Canon 60D – 35mm at f/4 ISO500; 1/5 sec. The sequence was taken on March 16, 2014 between 19:16 and 20:42.
Here’s a closeup:
The Cabo Espichel lighthouse near, Sesimbra, Portugal and the full Moon on March 16, 2014. Credit and copyright: Miguel Claro.
You can check out other recent full Moon photos and more taken by our readers at our Flickr page.
Want to get your astrophoto featured on Universe Today? Join our Flickr group or send us your images by email (this means you’re giving us permission to post them). Please explain what’s in the picture, when you took it, the equipment you used, etc.
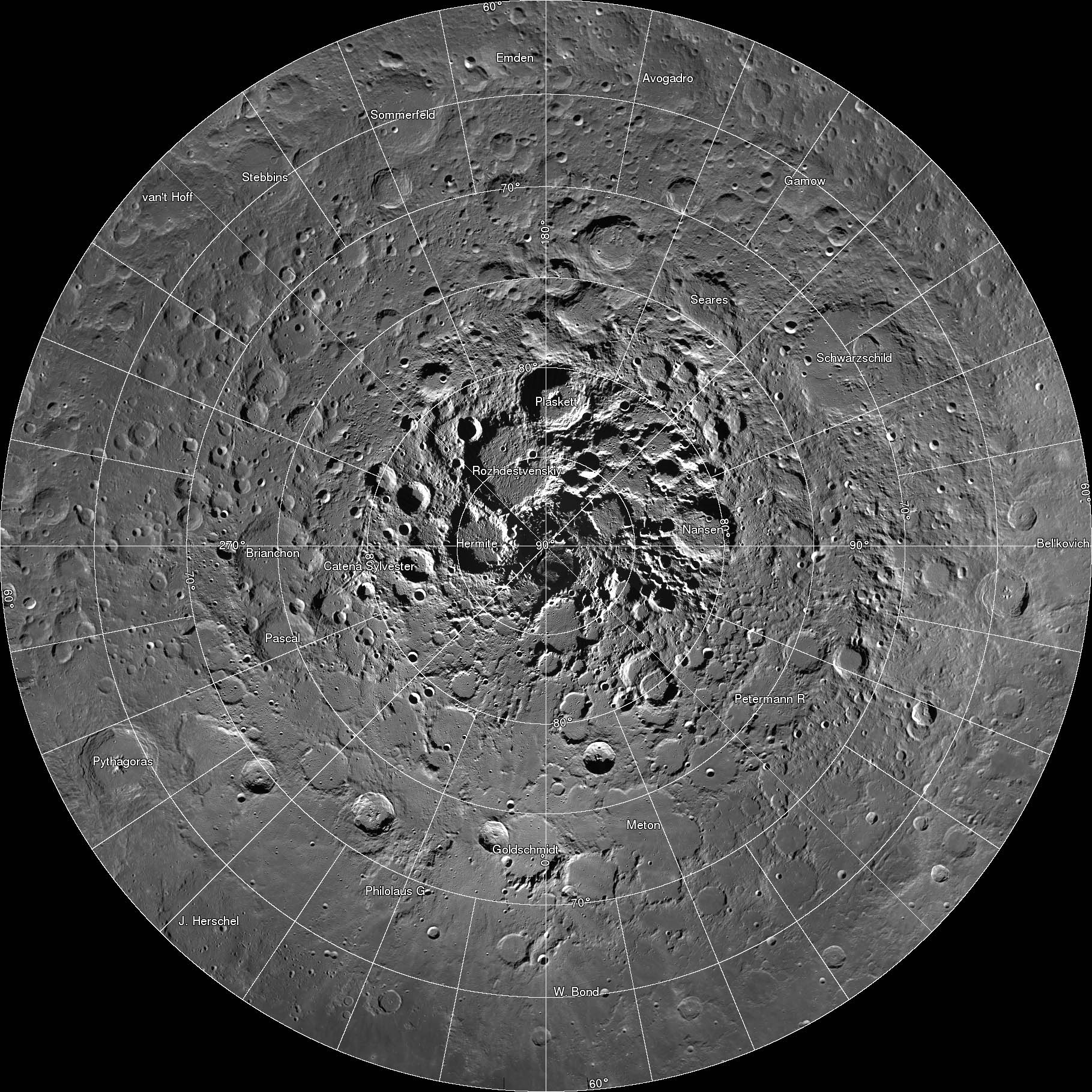
A new interactive mosaic from NASA's Lunar Reconnaissance Orbiter covers the north pole of the moon from 60 to 90 degrees north latitude at a resolution of 6-1/2 feet (2 meters) per pixel. Close-ups of Thales crater (right side) zoom in to reveal increasing levels of detail.
Image Credit: NASA/GSFC/Arizona State University
OMG – breathtaking! That was my reaction when I clicked on this incredible new interactive map of the moon’s north polar region. Be prepared to be amazed. It took four years and 10,581 images for the LROC (Lunar Reconnaissance Orbiter Camera) team to assemble what’s believed to be the largest publicly available image mosaic in existence. With over 650 gigapixels of data at a resolution of 2 meters per pixel, you’ll feel like you’re dropping in by parachute to the lunar surface.
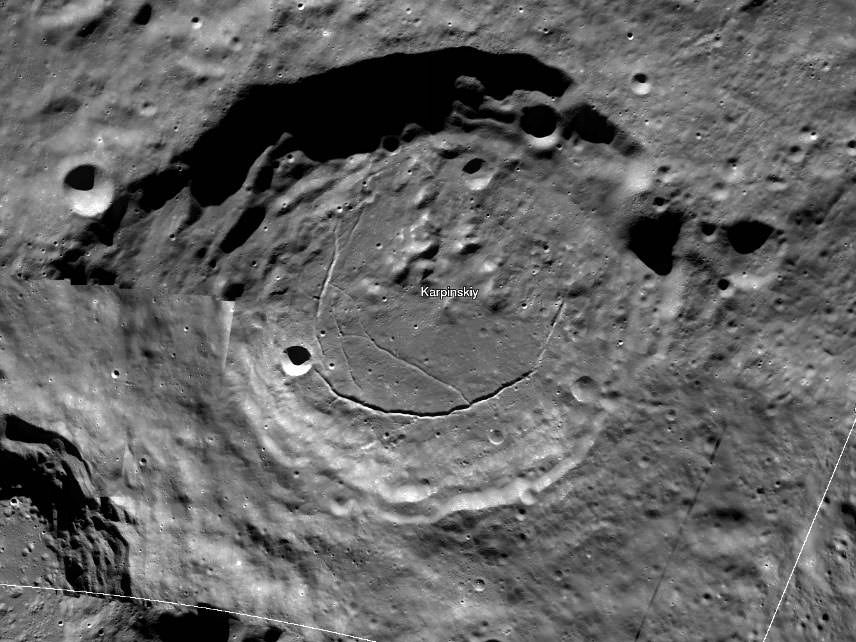
Wide view of the 91-km Karpinskiy Crater from the new interactive north pole mosaic. See image below for a zoomed-in view. Credit: NASA/GSFC/Arizona State Univ.
When you call up the map, be sure to click first on the full-screen button below the zoom slider. Now you’re ready for the full experience. With mouse in hand, you’re free to zoom and pan as you please. Take in the view of Whipple Crater shadowed in polar darkeness or zoom to the bottom of Karpinskiy Crater and fly like a bird over its fractured floor.
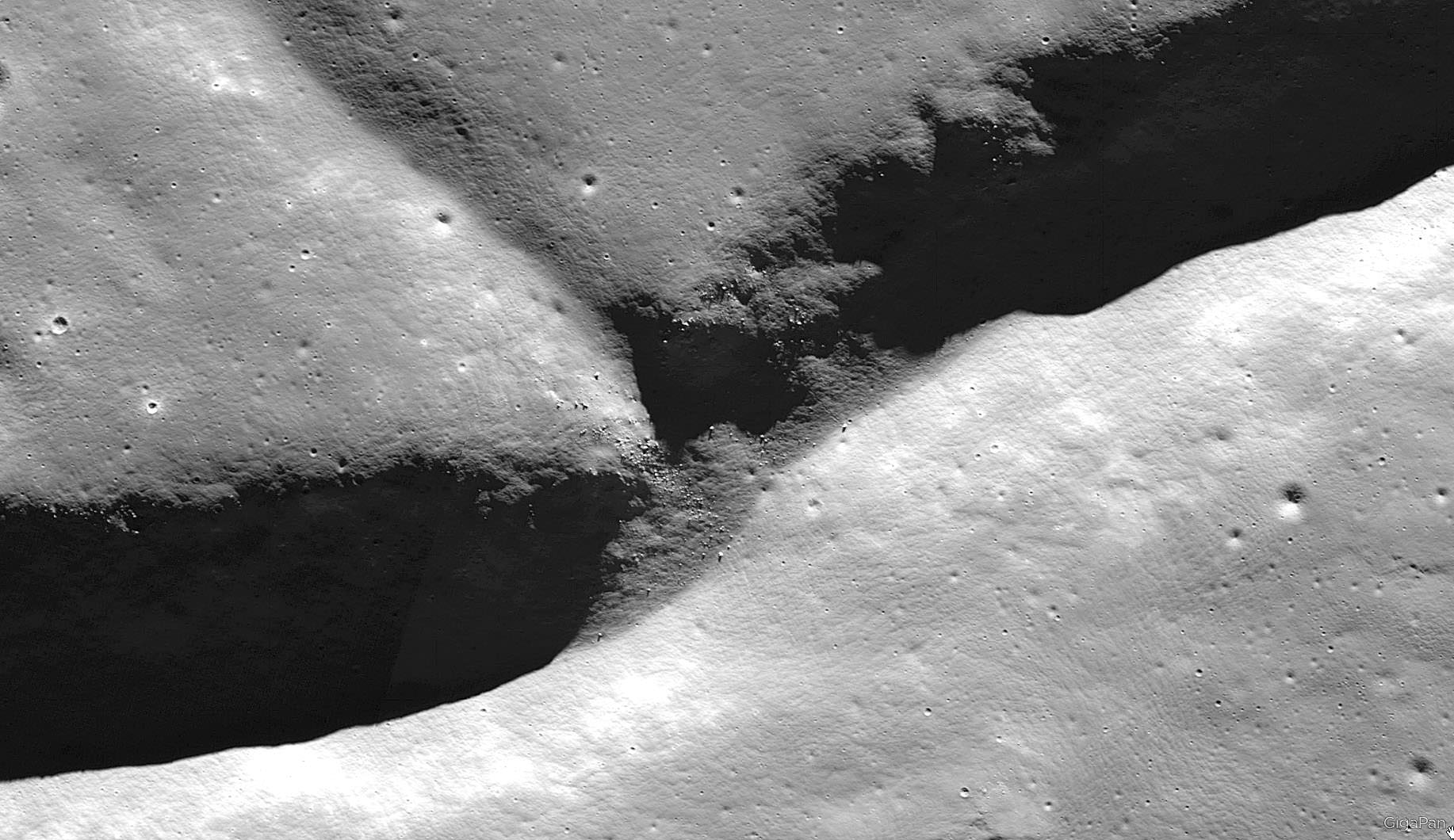
In this photo, we come in for a closer look at the fracture or rill in Karpinskiy’s floor. Notice the small, lighter-toned boulders on the cliff side. The images were all taken with the Lunar Reconnaissance Orbiter’s Narrow Angle Camera (NAC). Credit: NASA/GFSC/Arizona State Univ.
The images are so detailed and the zoom so smooth, there’s nothing artificial about the ride. Except the fact you’re not actually orbit. Darn close though. All the pictures were taken over the past few years by NASA’s Lunar Reconnaissance Orbiter which can fly as low as 50 km (31 miles) over the lunar surface and resolve details the size of a desk.
Printed at 300 dpi – a high-quality printing resolution that requires you to peer very closely to distinguish pixels – the mosaic map would be larger than a football field. Credit: NASA
There are 10 snapshots along the bottom of the map – click them and you’ll be swiftly carried directly to that feature. One of them is the lunar gravity probe GRAIL-B impact site.
The region the gigapixel map covers superimposed on the outline of the U.S. Credit: NASA
To create the 2-D map, a polar stereographic projection was used in to limit mapping distortions. In addition, the LROC team used information from the LOLA and GRAIL teams and an improved camera pointing model to accurately project each image in the mosaic to within 20 meters. For more information on the project, click HERE.
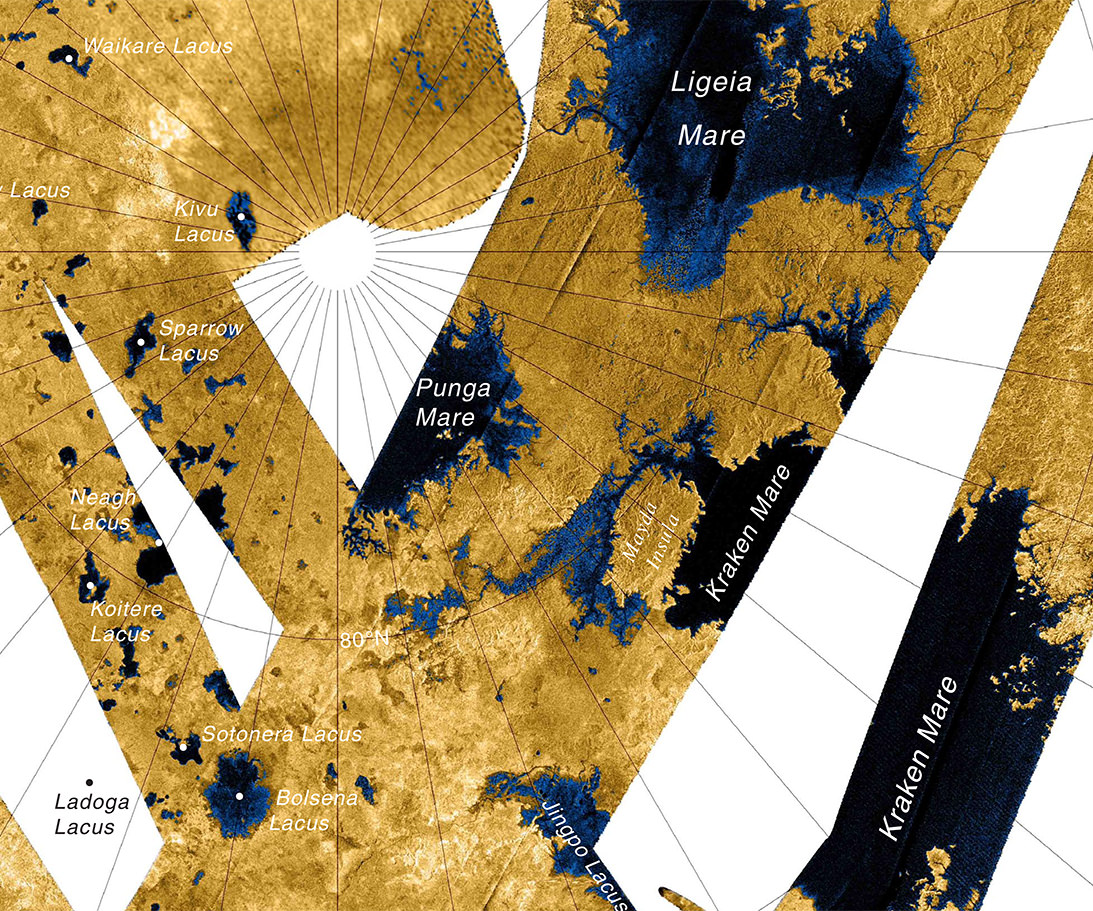
Cassini VIMS image of specular reflections in one of Titan's lakes from a flyby on July 24, 2012 (NASA/JPL-Caltech/SSI/Jason W. Barnes et al.)
It’s no surprise that Titan’s north polar region is covered with vast lakes and seas of liquid methane — these have been imaged many times by Cassini during its ten years in orbit around Saturn. What is surprising though is just how incredibly smooth the surfaces of these lakes have been found to be.
One would think that such large expanses of surface liquid — some of Titan’s seas are as big the Great Lakes — would exhibit at least a little surface action on a world with an atmosphere as dense as Titan’s. But repeated radar imaging has shown their surfaces to be “as smooth as the paint on a car.” Over the past several years scientists have puzzled over this anomaly but now they may have truly seen the light — that is, reflected light from what could actually be waves on Titan!
Using data acquired during flybys of Titan in 2012 and 2013, planetary scientist Jason Barnes from the University of Idaho and a team of researchers from several other institutions including JPL, Cornell, and MIT, have identified what might be waves in the surface of Punga Mare, one of Titan’s biggest lakes.
For a sense of scale, Lake Victoria, the largest lake in Africa, could fit lengthwise across Titan’s 380-km (236-mile) -wide Punga Mare.
Variations in specular highlights in four pixels observed in the surface of Punga Mare by Cassini’s VIMS (Visible and Infrared Mapping Spectrometer) have been interpreted by the team as being the result of waves — or, perhaps more accurately, ripples, seeing as that they are estimated to be a mere 2 centimeters in height.
Still, based on what’s been observed thus far on Titan, that’s downright choppy.
If the Cassini observations interpreted by Barnes et al. are indicative of waves in Punga Mare, they could also explain previous specular variations seen in other bodies of liquid, like the smaller Kivu Lacus (top image).
Map of Titan’s northern “Land o’ Lakes” made from Cassini high-resolution radar imaging (NASA/JPL/USGS)
“If correct this discovery represents the first sea-surface waves known outside of Earth.”
– Jason W. Barnes et al.
Then again, wave action isn’t the only possible answer. Similar varied specular highlights could also be caused by a wet surface — like a methane mud flat. Further observations will be needed to rule out other possibilities and obtain a more accurate “surf forecast” for Titan.
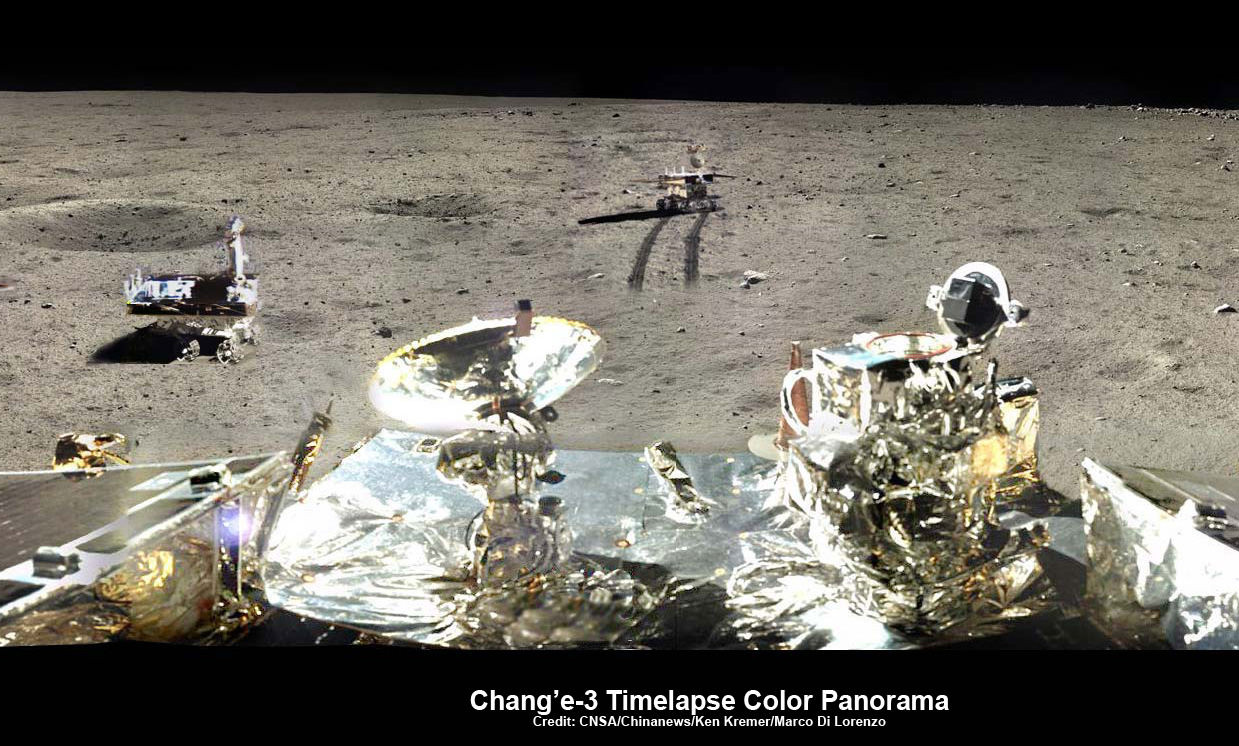
Chang’e-3/Yutu Timelapse Color Panorama This newly expanded timelapse composite view shows China’s Yutu moon rover at two positions passing by crater and heading south and away from the Chang’e-3 lunar landing site forever about a week after the Dec. 14, 2013 touchdown at Mare Imbrium. This cropped view was taken from the 360-degree timelapse panorama. See complete 360 degree landing site timelapse panorama herein and APOD Feb. 3, 2014. Chang’e-3 landers extreme ultraviolet (EUV) camera is at right, antenna at left. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our complete Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
Chang’e-3/Yutu Timelapse Color Panorama
This newly expanded timelapse composite view shows China’s Yutu moon rover at two positions passing by crater and heading south and away from the Chang’e-3 lunar landing site forever about a week after the Dec. 14, 2013 touchdown at Mare Imbrium. This cropped view was taken from the 360-degree timelapse panorama. See complete 360 degree landing site timelapse panorama herein and APOD Feb. 3, 2014. Chang’e-3 landers extreme ultraviolet (EUV) camera is at right, antenna at left. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com.
See our complete Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm[/caption]
KENNEDY SPACE CENTER, FL – China’s maiden moon rover Yutu awoke from her regular two week long slumber on Friday, March 14, to begin the 4th Lunar Day since the probes history making touchdown on the surface of Earth’s nearest neighbor in mid December 2013.
But the endearing robot is still ailing and suffering from mechanical control issues that popped up in late January 2014 according to Chinese space officials.
The Chang’e-3 mothership lander that deposited Yutu onto the pockmarked lunar surface also awoke two days earlier on Wednesday, March 12.
“Yutu and the lander have restarted their operations and are exploring as scheduled,” according to China’s State Administration of Science, Technology and Industry for National Defence (SASTIND), responsible for executing the Chang’e-3 mission.
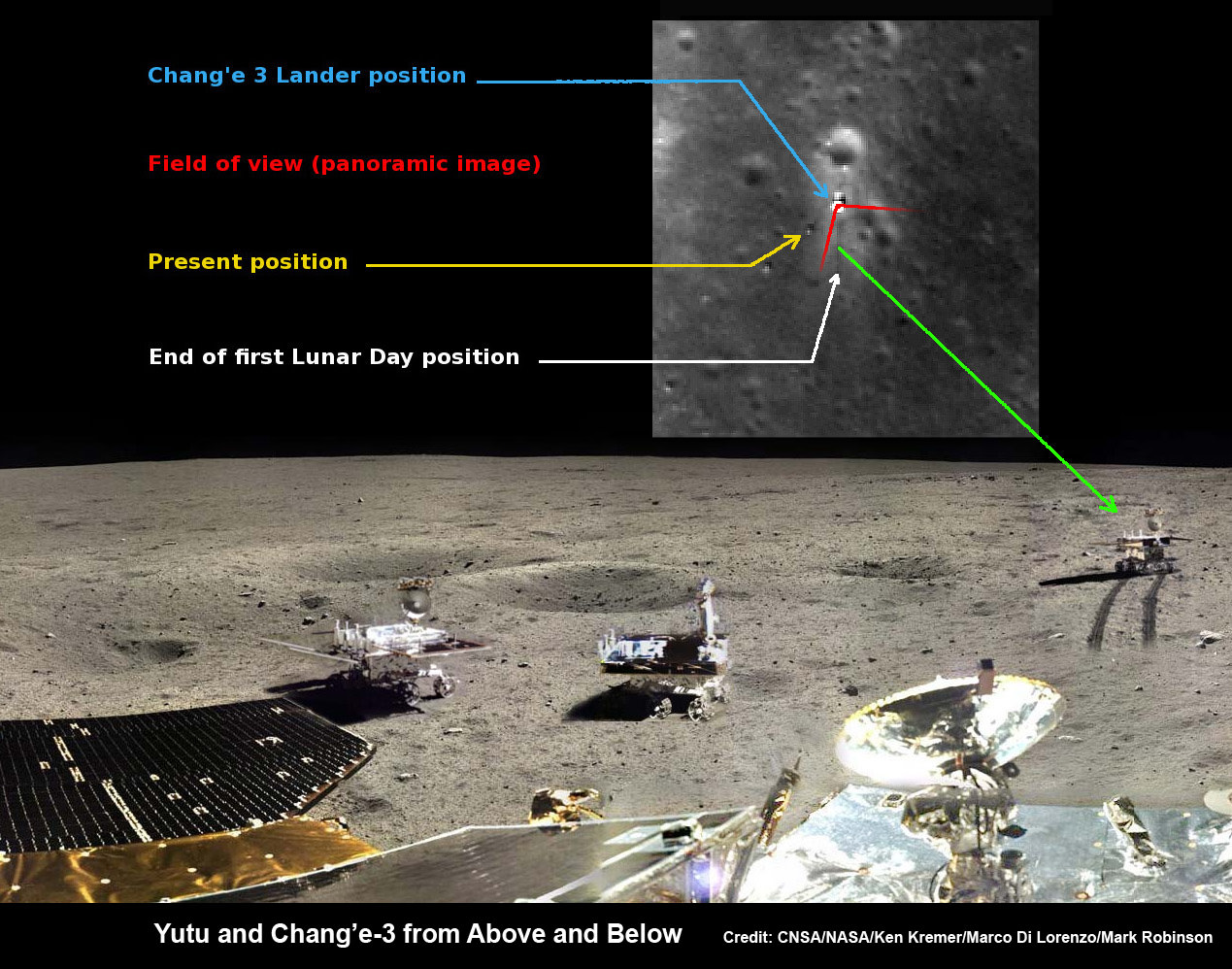
Yutu rover drives around Chang’e-3 lander – from Above And Below. Composite view shows China’s Yutu rover and tracks driving in clockwise direction around Chang’e-3 lander from Above And Below (orbit and surface). The Chang’e-3 timelapse lander color panorama (bottom) and orbital view (top) from NASA’s LRO orbiter shows Yutu rover after it drove down the ramp to the moon’s surface and began driving around the landers right side, passing by craters and heading south on Lunar Day 1. It then moved northwest during Lunar Day 2. Arrows show Yutu’s positions over time. Credit: CNSA/NASA/Ken Kremer/Marco Di Lorenzo/Mark Robinson
Yutu is China’s first ever Moon rover and successfully accomplished a soft landing on the Moon on Dec. 14, 2013, piggybacked atop the Chang’e-3 mothership lander.
However, “the control issues that have troubled Yutu since January remain,” says China’s government owned Xinhua news agency.
The hugely popular ‘Yutu’ rover is still suffering from an inability to maneuver its life giving solar panels. It is also unable to activate its six wheels and move around the surface – as I reported here.
At the time that Yutu’s 2nd Lunar sleep period began on Jan. 25, 2014, Chinese space officials had announced that the robot’s future was in jeopardy after it suffered an unidentified “ mechanical control anomaly” due to the “complicated lunar surface.”
360-degree time-lapse color panorama from China’s Chang’e-3 lander
This new 360-degree time-lapse color panorama from China’s Chang’e-3 lander shows the Yutu rover at five different positions, including passing by crater and heading south and away from the Chang’e-3 lunar landing site forever during its trek over the Moon’s surface at its landing site from Dec. 15-22, 2013 during the 1st Lunar Day. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
Earlier this month, China announced that “Yutu suffered a control circuit malfunction in its driving unit.”
“The control circuit problem prevented Yutu from entering the second dormancy as planned,” said Ye Peijian, chief scientist of the Chang’e-3 program, in an exclusive interview with Xinhua.
A functioning control circuit is required to lower the rovers mast and protect the delicate components and instruments mounted on the mast from directly suffering from the extremely harsh cold of the Moon’s recurring night time periods.
“Normal dormancy needs Yutu to fold its mast and solar panels,” said Ye according to CCTV, China’s state run broadcaster.
Fortunately, the panoramic camera, radar and other sciene instruments and equipment are functioning normally, says SASTIND.
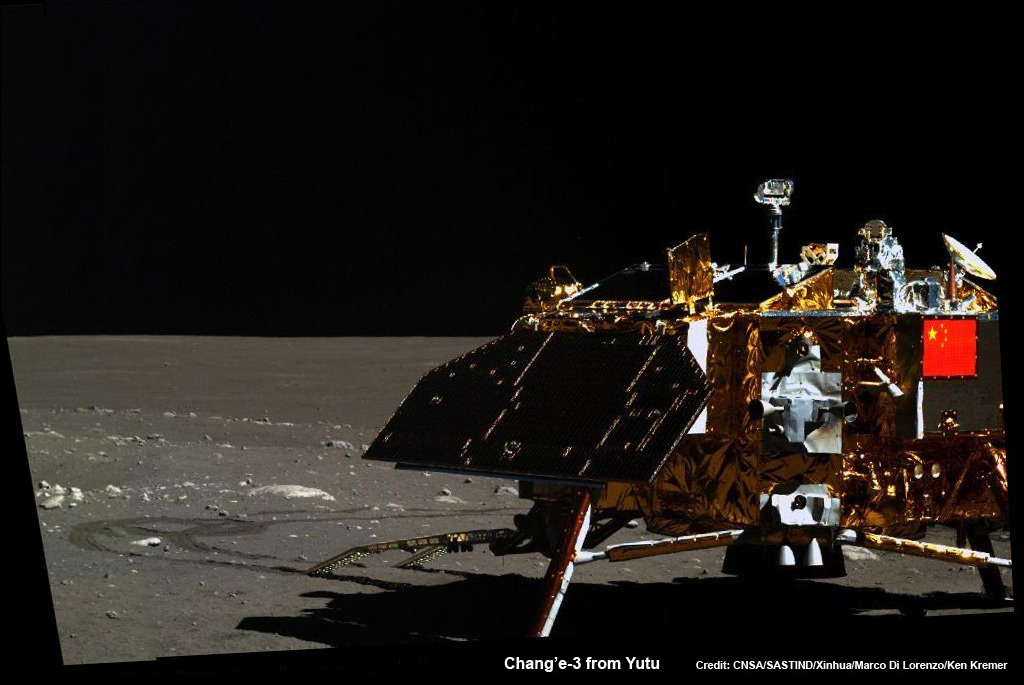
Yutu even snapped at least a pair new images of the lander during Lunar Day 3.
See our mosaic of Yutu’s Lunar Day 3 lander image as well as our the complete 360 degree timelapse color panorama from Lunar Day 1 herein and at NASA APOD on Feb. 3, 2014 – assembled by Marco Di Lorenzo and Ken Kremer.
Mosaic of the Chang’e-3 moon lander and the lunar surface taken by the camera on China’s Yutu moon rover from a position south of the lander during Lunar Day 3. Note the landing ramp and rover tracks at left. Credit: CNSA/SASTIND/Xinhua/Marco Di Lorenzo/Ken Kremer
By reawakening on March 14, the 140 kg robot also survived for its three month design lifetime on the moon.
Yutu’s goal is to accomplish a roving expedition to investigate the moon’s surface composition and natural resources.
So far the 1200 kg Chang’e-3 lander is functioning as planned during its first three lunar days, says SASTIND.
“The lander’s optical telescope, extreme ultraviolet camera and lunar dust measurement device completed scheduled tasks and obtained a large amount of data,” says China’s government owned Xinhua news agency.
China is only the 3rd country in the world to successfully soft land a spacecraft on Earth’s nearest neighbor after the United States and the Soviet Union.
Stay tuned here for Ken’s continuing Chang’e-3, Orion, Orbital Sciences, SpaceX, commercial space, LADEE, Mars and more planetary and human spaceflight news. Learn more at Ken’s upcoming presentations at the NEAF astro/space convention on April 12/13.
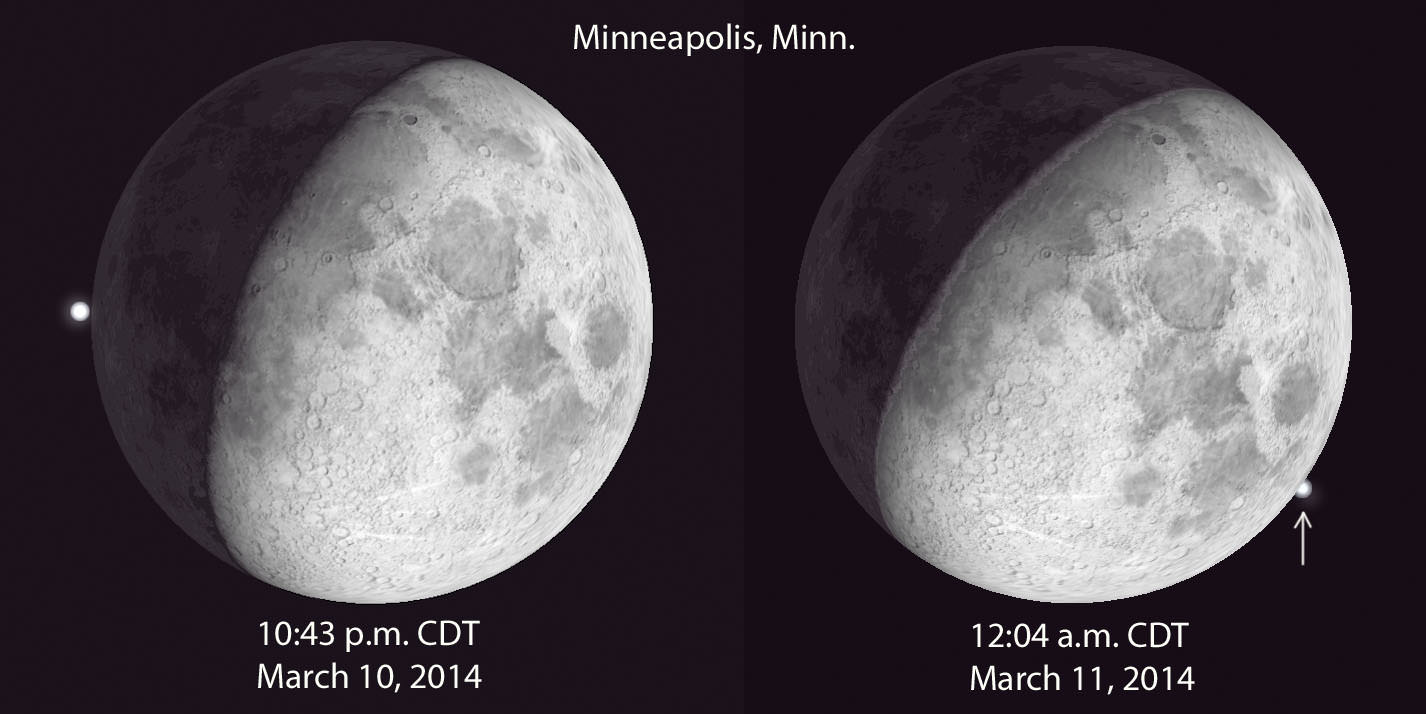
Lambda Geminorum at 10:43 p.m. March 11 just two minutes before disappearing behind the moon as seen from Minneapolis, Minn. US. Stellarium
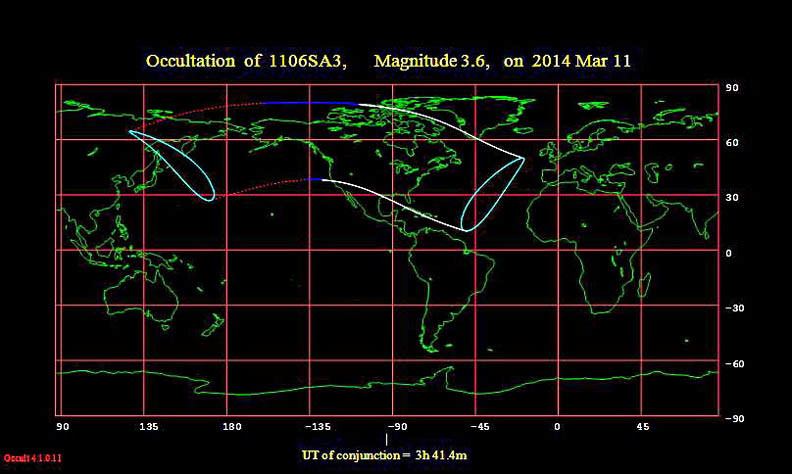
Ever dabbled in the occult? You’ll have your chance Monday night March 10 when the waxing gibbous moon glides in front of the star Lambda Geminorum for much of North America, occulting it from view for an hour or more. Occultations of stars by the moon happens regularly but most go unnoticed by casual skywatchers. Lambda is an exception because it’s one of the brighter stars that happens to lie along the moon’s path. Shining at magnitude +3.6, any small telescope and even a pair of 10×50 or larger binoculars will show it disappear along the dark edge of the moon.
Map showing where the disappearance (right half of tube-like figure) and reappearance of Lambda Gem will be visible. Credit: International Occultation Timing Assn. (IOTA)
With a telescope you can comfortably watch the star creep up to the moon’s edge and better anticipate the moment of its disappearance. The fun starts a few minutes before the impending black out when the moon, speeding along its orbit at some 2,280 mph (3,700 km/hr), draws very close to the star. During the final minute, Lambda may seem to hover forever at the moon’s invisible dark limb, and then – PFFFT – it’s gone! Whether you’re looking through telescope or binoculars, the star will blink out with surprising suddenness because the moon lacks an atmosphere.
Disappearance and reappearance seen from Minneapolis, Minn. Monday night. I’ve lightened the moon so you can see the dark limb. You’ll likely not see this edge in a telescope because of glare. Stellarium
If there was air up there, Lambda would gradually dim and disappear. Even without special instruments, early astronomers could be certain the moon had little if anything to protect it from the vacuum of space by observing occultations.
As the moon moves approximately its own diameter in an hour, you can watch Lambda re-emerge along the bright limb roughly an hour later, though its return will lack the drama and contrast of a dark limb disappearance. While occultations allow us to see how swiftly the moon moves in real time as well as provide information on its atmosphere or lack thereof, real science can be done, too.
Planets also are occasionally occulted by the moon. Time lapse of Venus’ disappearance on May 16, 2010
Observers along the occultation boundary in the southern U.S. can watch the star pop in and out of view as it’s alternately covered and uncovered by lunar peaks jutting from the moon’s limb. Before spacecraft thoroughly mapped the moon, careful timings made during these “grazing occultations” helped astronomers refine the profile of the moon’s limb as well as determine elevations of peaks and crater walls in polar regions. They can still be useful for refining a star’s position and motion in the sky.
The moon’s limb can also be used much like a doctor’s scalpel to split unsuspected double stars that otherwise can’t be resolved by direct observations. Take Lambda Gem for instance. We’ve known for a long time that it totes around a magnitude +10.7 companion star 10 arc seconds to its north-northeast, but previous occultations of the star have revealed an additional companion only a few hundredths of an arc second away orbiting the bright Lambda primary. The star plays a game of hide-and-seek, visible during some occultations but not others. Estimated by some as one magnitude fainter than Lambda, keep an eye out for it Monday night in the instant after Lambda goes into hiding.
Lunar occultation and reappearance of Antares Oct. 21, 2009
I watched just such a “two-step” disappearance of Antares and it fainter companion some years back. With brilliant Antares briefly out of view behind the moon’s limb, I easily spotted its magnitude +5.4 companion just 2.5 arc seconds away – an otherwise very difficult feat at my northern latitude.
Want to know more about things that disappear (and reappear) in the night? Make a visit to the International Occultation Timing Association’s websitewhere you’ll find lists of upcoming events, software and how to contribute your observations. If you’re game for Monday night’s occultation, click HEREfor a list of cities and times. Remember that the time show is Universal or Greenwich Time. Subtract 4 hours for Eastern Daylight, 5 for Central, 6 for Mountain and 7 for Pacific. Wishing you clear skies as always!
Yutu rover drives around Chang’e-3 lander – from Above And Below. Composite view shows China’s Yutu rover and tracks driving in clockwise direction around Chang’e-3 lander from Above And Below (orbit and surface). The Chang’e-3 timelapse lander color panorama (bottom) and orbital view (top) from NASA’s LRO orbiter shows Yutu rover after it drove down the ramp to the moon’s surface and began driving around the landers right side, passing by craters and heading south on Lunar Day 1. It then moved northwest during Lunar Day 2. Arrows show Yutu’s positions over time. Credit: CNSA/NASA/Ken Kremer/Marco Di Lorenzo/Mark Robinson
Yutu rover drives around Chang’e-3 lander – from Above And Below
Composite view shows China’s Yutu rover and tracks driving in clockwise direction around Chang’e-3 lander from Above And Below (orbit and surface). The Chang’e-3 timelapse lander color panorama (bottom) and orbital view (top) from NASA’s LRO orbiter shows Yutu rover after it drove down the ramp to the moon’s surface and began driving around the landers right side, passing by craters and heading south on Lunar Day 1. It then moved northwest during Lunar Day 2. Arrows show Yutu’s positions over time.
Credit: CNSA/NASA/Ken Kremer/Marco Di Lorenzo/Mark Robinson
See below more mosaics and LRO imagery
Story updated[/caption]
The powerful telescopic camera aboard NASA’s Lunar Reconnaissance Orbiter (LRO) has captured spectacular new images detailing the traverse of China’s Yutu moon rover around the landing site during its first two months exploring the Moon’s pockmarked grey terrain.
The newly released high resolution LRO images even show Yutu’s tracks cutting into the lunar surface as the world famous Chinese robot drove in a clockwise direction around the Chang’e-3 lander that delivered it to the ground in mid-December 2013.
You can precisely follow Yutu’s movements over time – from ‘above and below’ – in our new composite view (shown above) combining the latest LRO image with our timelapse mosaic showing the rover’s history making path from the touchdown point last December to today’s location.
Yutu is China’s first ever Moon rover and successfully accomplished a soft landing on the Moon on Dec. 14, 2013, piggybacked atop the Chang’e-3 mothership lander.
Barely seven hours after touchdown, the six wheeled moon buggy drove down a pair of ramps onto the desolate gray plains of the lunar surface at Mare Imbrium (Sea of Rains) covered by volcanic material.
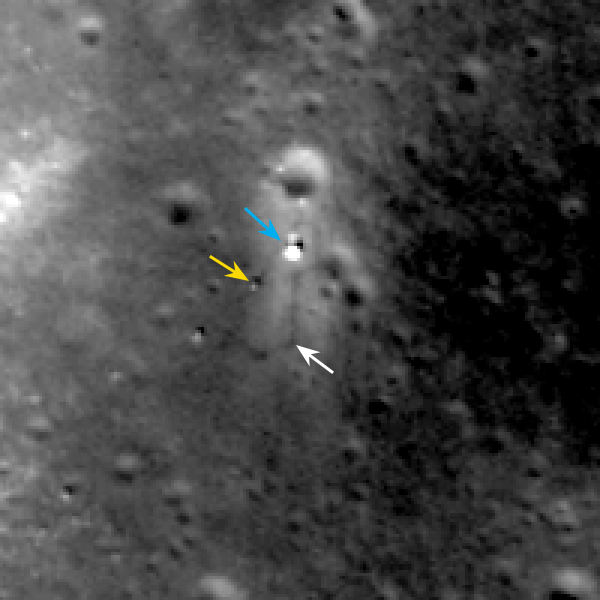
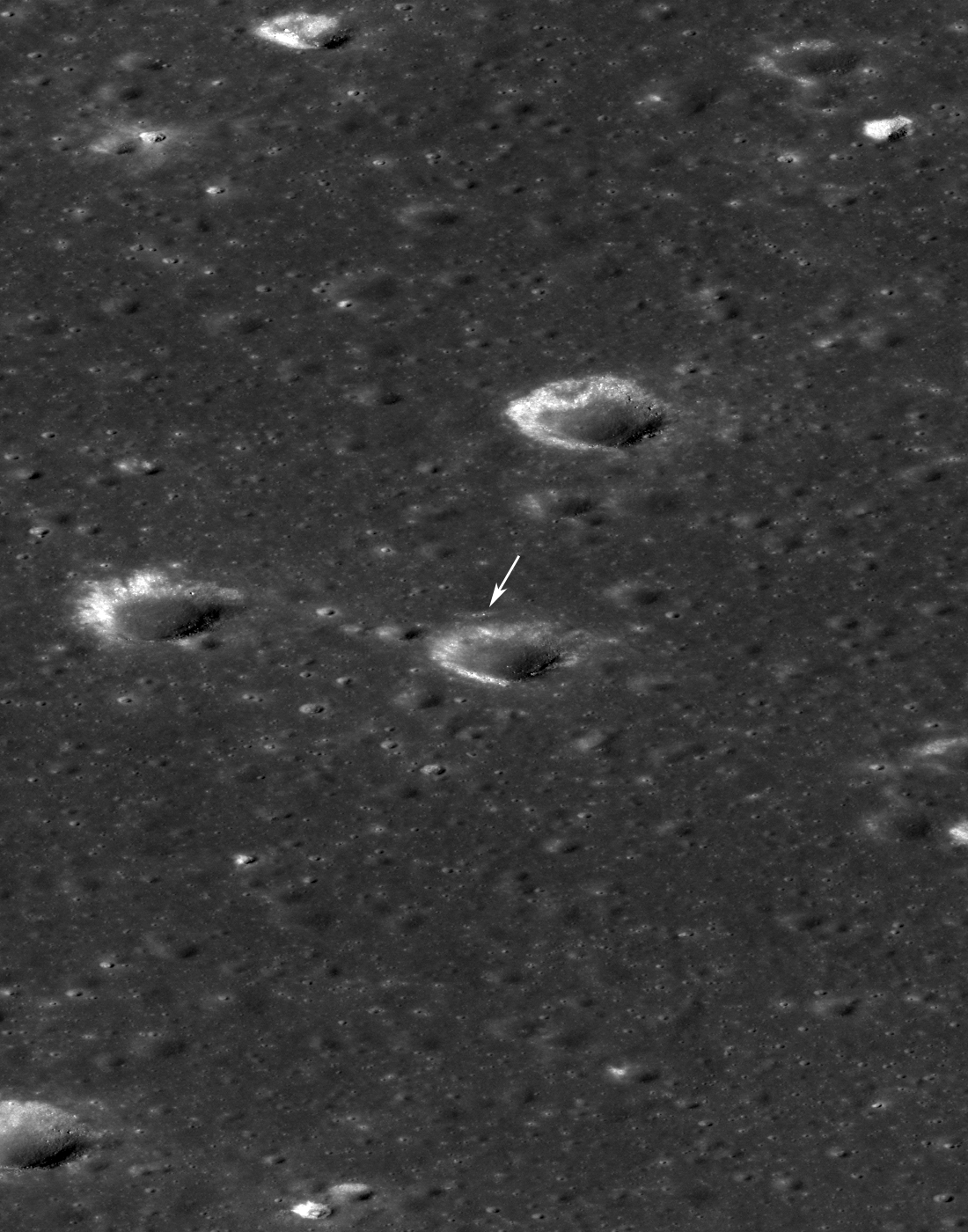
LROC February 2014 image of Chang’e 3 site. Blue arrow indicates Chang’e 3 lander; yellow arrow points to Yutu (rover); and white arrow marks the December location of Yutu. Yutu’s tracks can be followed clockwise around the lander to its current location. Image width 200 meters (about 656 feet). Credit: NASA/Goddard/Arizona State University
Altogether three images of the rover and lander have been taken to date by the Lunar Reconnaissance Orbiter Camera (LROC) aboard LRO – specifically the hi res narrow angle camera (NAC).
The LROC NAC images were captured on Dec. 25, 2013, Jan. 21, 2014 and Feb. 17, 2014 as LRO soared overhead.
The four image LRO composite below includes a pre-landing image taken on June 30, 2013.
Four LROC NAC views of the Chang’e 3 landing site. A) before landing, June 30, 2013 B) after landing, Dec. 25, 2013 C) Jan. 21, 2014 D) Feb. 17, 2014 Width of each image is 200 meters (about 656 feet). Follow Yutu’s path clockwise around the lander in “D.” Credit: NASA/Goddard/Arizona State University
Since the solar incidence angles were different, the local topography and reflectance changes between images showing different levels of details.
“In the case of the Chang’e 3 site, with the sun higher in the sky one can now see the rover Yutu’s tracks (in the February image),” wrote Mark Robinson, Principal Investigator for the LROC camera in an LRO update.
The solar powered rover and lander can only operate during periods of lunar daylight, which last 14 days each.
During each lunar night, they both must power down and enter hibernate mode since there is no sunlight available to generate power and no communications are possible with Earth.
Here is a gif animation from the NASA LRO team combining all four LROC images.
Four views of the Chang’e 3 landing site from before the landing until Feb. 2014. Credit: NASA/GSFC/Arizona State University
During Lunar Day 1, Yutu drove down the landers ramps and moved around the right side in a clockwise direction.
By the end of the first lunar day, Yutu had driven to a position about 30 meters (100 feet) south of the Chang’e-3 lander, based on the imagery.
See our complete 360 degree timelapse color panorama from Lunar Day 1 herein and at NASA APOD on Feb. 3, 2014 – assembled by Marco Di Lorenzo and Ken Kremer.
360-degree time-lapse color panorama from China’s Chang’e-3 lander. This new 360-degree time-lapse color panorama from China’s Chang’e-3 lander shows the Yutu rover at five different positions, including passing by crater and heading south and away from the Chang’e-3 lunar landing site forever during its trek over the Moon’s surface at its landing site from Dec. 15-22, 2013 during the 1st Lunar Day. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
After awakening for Lunar Day 2, Yutu then moved northwest and parked about 17 meters (56 feet) southwest of the lander, according to Robinson.
By comparing the Janaury and February images “it is apparent that Yutu did not move appreciably from the January location,” said Robinson.
At this moment Yutu and the companion Chang’e-3 lander are sleeping through their 3rd Lunar Night.
They entered hibernation mode on Feb. 22 and Feb. 23, 2014 respectively.
Hopefully both probes will awaken from their slumber sometime in the next week when the Moon again basks in daylight glow to begin a 4th day of lunar surface science operations.
“We all wish it would be able to wake up again,” said Ye Peijian, chief scientist of the Chang’e-3 program, according to CCTV, China’s state run broadcaster.
However, the hugely popular ‘Yutu’ rover is still suffering from an inability to maneuver its life giving solar panels. It is also unable to move – as I reported here.
The 140 kg rover is now nearing its planned 3 month long life expectancy on a moon roving expedition to investigate the moon’s surface composition and natural resources.
Chang’e-3/Yutu Timelapse Color Panorama
This newly expanded timelapse composite view shows China’s Yutu moon rover at two positions passing by crater and heading south and away from the Chang’e-3 lunar landing site forever about a week after the Dec. 14, 2013 touchdown at Mare Imbrium. This cropped view was taken from the 360-degree timelapse panorama. See complete 360 degree landing site timelapse panorama herein and APOD Feb. 3, 2014. Chang’e-3 landers extreme ultraviolet (EUV) camera is at right, antenna at left. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our complete Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
China is only the 3rd country in the world to successfully soft land a spacecraft on Earth’s nearest neighbor after the United States and the Soviet Union.
Stay tuned here for Ken’s continuing Chang’e-3, Orion, Orbital Sciences, SpaceX, commercial space, LADEE, Mars and more planetary and human spaceflight news. Learn more at Ken’s upcoming presentations at the NEAF astro/space convention on April 12/13.
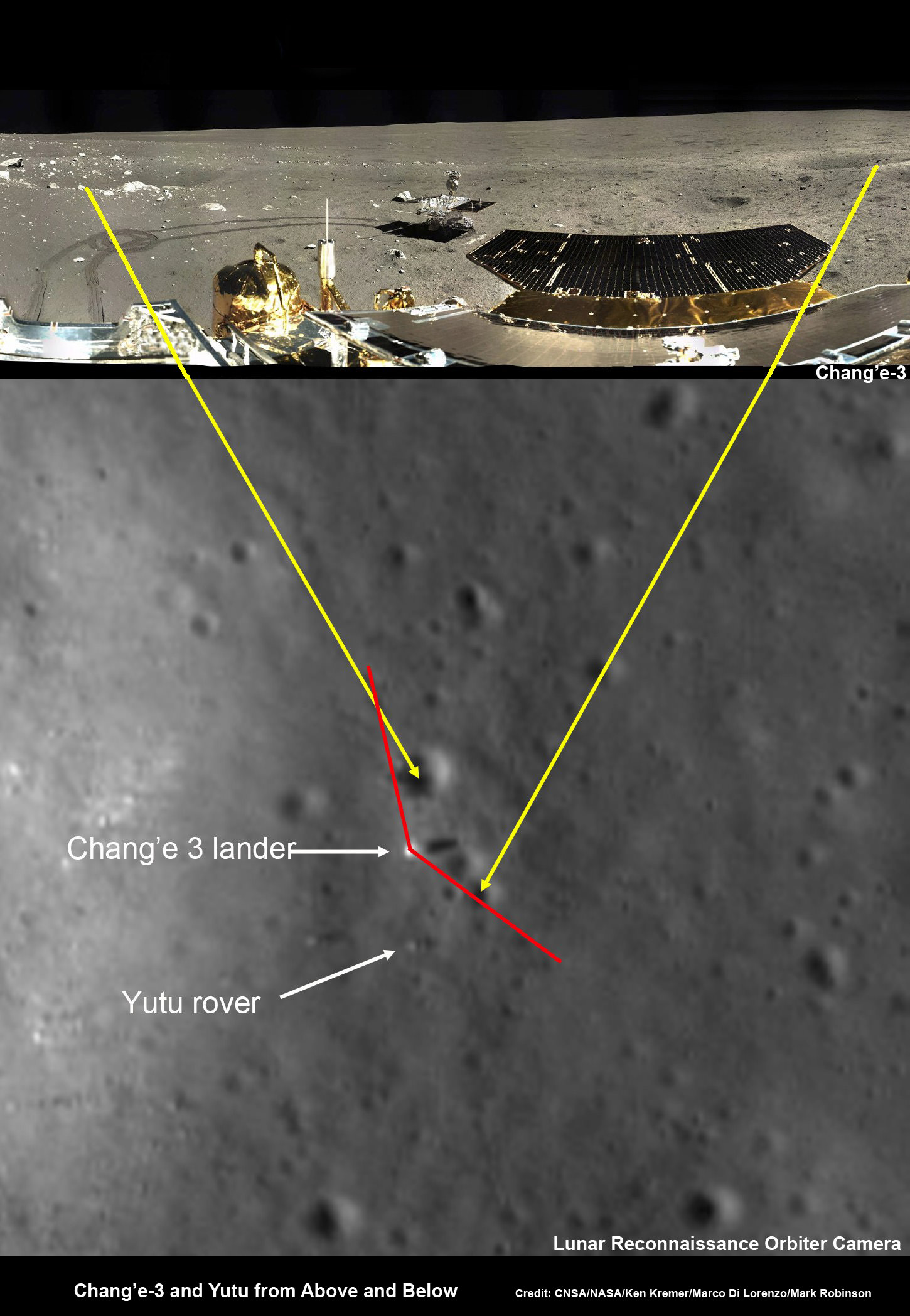
Chang’e-3 lander and Yutu rover – from Above And Below Composite view shows China’s Chang’e-3 lander and Yutu rover from Above And Below (orbit and surface) – lander color panorama (top) and orbital view from NASA’s LRO orbiter (bottom). Chang’e-3 lander color panorama shows Yutu rover after it drove down the ramp to the moon’s surface and began driving around the landers right side to the south. Yellow lines connect craters seen in the lander panorama and the LROC image from LRO (taken at a later date after the rover had moved), red lines indicate approximate field of view of the lander panorama. Credit: CNSA/NASA/Ken Kremer/Marco Di Lorenzo/Mark RobinsonLRO slewed 54 degrees to the east on Feb. 16, 2014, to allow the LROC instrument to snap a dramatic oblique view of the Chang’e 3 site (arrow). Crater in front of lander is 450 meters (about 1,476 feet) in diameter. Image width is 2,900 meters (about 9,500 feet) at the center. Credit: NASA/Goddard/Arizona State University
One of my favorite pet peeves is the inability of conventional models to accurately convey the gigantic scale of the Solar System. Most of us grew up with models of the planets made of wood or plastic or spray painted styrofoam balls impaled on bent wire hangers (don’t tell Mommy), or, more commonly, illustrations on posters and in textbooks. While these can be fun to look at and even show the correct relative sizes of the planets (although usually not as compared to the Sun) there’s one thing that they simply cannot relate to the viewer: space is really, really, really big.
Now there are some more human-scale models out there that do show how far the planets are from each other, but many of them require some walking, driving, or even flying to traverse their full distances. Alternatively, thanks to the magic of web pages which can be any size you like limited only by the imagination of the creator (and the patience of the viewer), accurate models can be easily presented showing the average (read: mind-blowingly enormous) distances between the planets… and no traveling or wire hangers required.
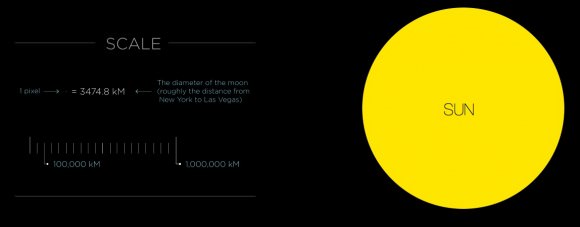
Despite their similar apparent sizes in our sky, the Moon and Sun are (obviously) quite different in actual size. Which is a good thing for us. (Credit: Josh Worth)
Created by designer Josh Worth, “If the Moon Were Only 1 Pixel: A Tediously Accurate Scale Model of the Solar System” uses a horizontally-sliding HTML page to show how far it is from one planet to another, as well as their relative sizes, based on our Moon being just a single pixel in diameter (and everything lined up neatly in a row, which it never is.) You can use the scroll bar at the bottom of the page or arrow keys to travel the distances or, if you want to feel like you’re at least getting some exercise, scroll with your mouse or computer’s swipe pad (where applicable.) You can also use the astronomical symbols at the top of the page to “warp” to each planet.
Just try not to miss anything — it’s a surprisingly big place out there.
“You may think it’s a long way down the road to the chemist’s, but that’s just peanuts to space.”
This time-lapse color panorama from China’s Chang’e-3 lander shows the Yutu rover at two different positions during its trek over the Moon’s surface at its landing site from Dec. 15-18, 2013. This view was taken from the 360-degree panorama. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo. See our complete Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
This time-lapse color panorama from China’s Chang’e-3 lander shows the Yutu rover at two different positions during its trek over the Moon’s surface at its landing site from Dec. 15-18, 2013. This view was taken from the 360-degree panorama.
Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo.
See our complete 5 position Yutu timelapse pano herein and 3 position pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
Story updated[/caption]
The serious technical malfunction afflicting the life and continued operations of China’s Yutu moon rover since the start of its second Lunar Night time hibernation in late January 2014 has been identified as an inability to properly maneuver the life giving solar panels, according to a top Chinese space official.
“Yutu suffered a control circuit malfunction in its driving unit,” according to a newly published report on March 1 by the state owned Xinhua news agency.
“The control circuit problem prevented Yutu from entering the second dormancy as planned,” said Ye Peijian, chief scientist of the Chang’e-3 program, in an exclusive interview with Xinhua.
At the time that Yutu’s 2nd Lunar sleep period began on Jan. 25, 2014, Chinese space officials had announced that the robot’s future was in jeopardy after it suffered an unidentified “ mechanical control anomaly” due to the “complicated lunar surface.”
A functioning control circuit is required to lower the rovers mast and protect the delicate components and instruments mounted on the mast from directly suffering from the extremely harsh cold of the Moon’s recurring night time periods.
“Normal dormancy needs Yutu to fold its mast and solar panels,” said Ye.
The high gain communications antenna and the imaging cameras are attached to the mast.
They must be folded down into a warmed electronics box to shield them from the damaging effects of the Moon’s nightfall when temperatures plunge dramatically to below minus 180 Celsius, or minus 292 degrees Fahrenheit.
Chang’e-3/Yutu Timelapse Color Panorama
This newly expanded timelapse composite view shows China’s Yutu moon rover at two positions passing by crater and heading south and away from the Chang’e-3 lunar landing site forever about a week after the Dec. 14, 2013 touchdown at Mare Imbrium. This cropped view was taken from the 360-degree timelapse panorama. See complete 360 degree landing site timelapse panorama herein and APOD Feb. 3, 2014. Chang’e-3 landers extreme ultraviolet (EUV) camera is at right, antenna at left. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our complete Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
The solar panels also generate power during each Lunar day to keep the robot alive and conduct its mission of scientific exploration roving across the lunar terrain.
The rover and Chang’e-3 stationary lander must power down and sleep during each lunar night since there is no sunlight available to generate power and no communications are possible with Earth.
The panel driving unit also helps maneuver the panels into position to efficiently point to the sun to maximize the electrical output.
“The driving unit malfunction prevented Yutu to do those actions” said Ye.
Each lunar day and night lasts for alternating periods of 14 Earth days.
“This means Yutu had to go through the lunar night in extremely low temperatures.”
Apparently the mast was not retracted and remained vertical during the lunar nights 2 and 3.
And the camera somehow survived the harsh temperature decline and managed to continue operating since it snapped two images of the Chan’ge-3 lander during Lunar Day 3. See our two image mosaic – below.
360-degree time-lapse color panorama from China’s Chang’e-3 lander. This new 360-degree time-lapse color panorama from China’s Chang’e-3 lander shows the Yutu rover at five different positions, including passing by crater and heading south and away from the Chang’e-3 lunar landing site forever during its trek over the Moon’s surface at its landing site from Dec. 15-22, 2013 during the 1st Lunar Day. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
In addition to being chief scientist of the Chang’e-3 program Ye is also a member of the National Committee of the Chinese People’s Political Consultative Conference, the country’s top political advisory body.
Yutu is China’s first ever Moon rover and successfully accomplished a soft landing on the Moon on Dec. 14, 2013, piggybacked atop the Chang’e-3 mothership lander.
Barely seven hours after touchdown, the six wheeled moon buggy drove down a pair of ramps onto the desolate gray plains of the lunar surface at Mare Imbrium (Sea of Rains) covered by volcanic material.
For a time in mid-February, mission scientists feared that Yutu would no longer function when because no signals were received until two days later than the planned “awakening” from Lunar Night 2 on Feb. 10.
Mosaic of the Chang’e-3 moon lander and the lunar surface taken by the camera on China’s Yutu moon rover from a position south of the lander during Lunar Day 3. Note the landing ramp and rover tracks at left. Credit: CNSA/SASTIND/Xinhua/Marco Di Lorenzo/Ken Kremer
Fortunately, Yutu did finally wake up some 48 hours late on Feb. 12 and function on Lunar Day 3.
And the team engaged in troubleshooting to try and identify and rectify the technical problems.
Since then, Chinese space engineers engaged in troubleshooting to try and identify and rectify the technical problems in a race against time to find a solution before the start of Lunar Night 3.
“Yutu only carried out fixed point observations during its third lunar day.” according to China’s State Administration of Science, Technology and Industry for National Defence (SASTIND), responsible for the mission.
However it did complete some limited scientific observations. And fortunately the ground penetrating radar, panoramic and infrared imaging equipment all functioned normally.
Yutu and the companion Chang’e-3 lander have again gone into sleep mode during Lunar Night 3 on Feb. 22 and Feb 23 respectively, local Beijing time.
But the issue with the control circuit malfunction in its driving unit remains unresolved and still threatens the outlook for Yutu’s future exploration.
See our new Chang’e-3/Yutu lunar panoramas by Ken Kremer and Marco Di Lorenzo herein and at NASA APOD on Feb. 3, 2014.
Chang’e-3 lander and Yutu rover – from Above And Below Composite view shows China’s Chang’e-3 lander and Yutu rover from Above And Below (orbit and surface) – lander color panorama (top) and orbital view from NASA’s LRO orbiter (bottom). Chang’e-3 lander color panorama shows Yutu rover after it drove down the ramp to the moon’s surface and began driving around the landers right side to the south. Yellow lines connect craters seen in the lander panorama and the LROC image from LRO (taken at a later date after the rover had moved), red lines indicate approximate field of view of the lander panorama. Credit: CNSA/NASA/Ken Kremer/Marco Di Lorenzo/Mark Robinson
Yutu is now nearing its planned 3 month long life expectancy on a moon roving expedition to investigate the moon’s surface composition and natural resources.
The 1200 kg stationary lander is functioning normally. It is as expected to return science data about the Moon and conduct telescopic observations of the Earth and celestial objects for at least one year.
Yutu, which translates as ‘Jade Rabbit’ is named after the rabbit in Chinese mythology that lives on the Moon as a pet of the Moon goddess Chang’e.
“We all wish it would be able to wake up again,” said Ye according to CCTV, China’s state run broadcaster.
Ye will be reporting about Yutu and the Chang’e-3 mission at the annual session of the top advisory body, which opened today, Monday, March 3.
China is only the 3rd country in the world to successfully soft land a spacecraft on Earth’s nearest neighbor after the United States and the Soviet Union.
Stay tuned here for Ken’s continuing Chang’e-3, Orion, Orbital Sciences, SpaceX, commercial space, Curiosity, GPM, LADEE, Mars and more planetary and human spaceflight news. Learn more at Ken’s upcoming presentations at the NEAF convention on April 12/13.