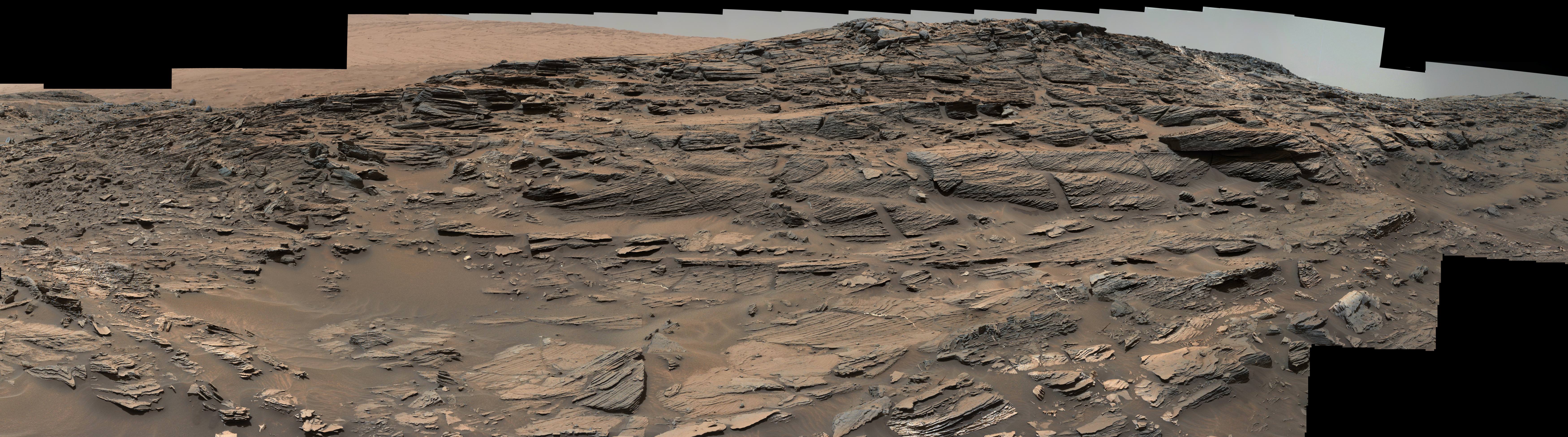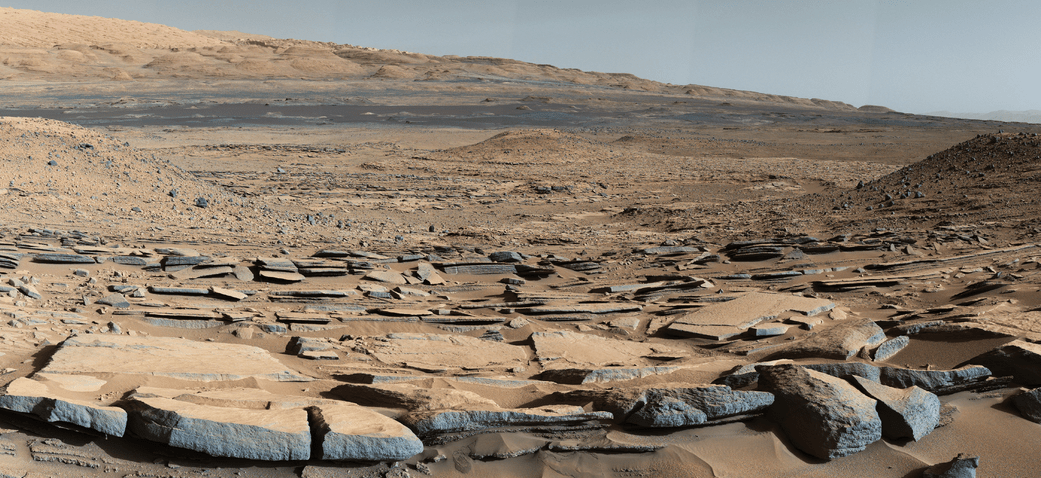
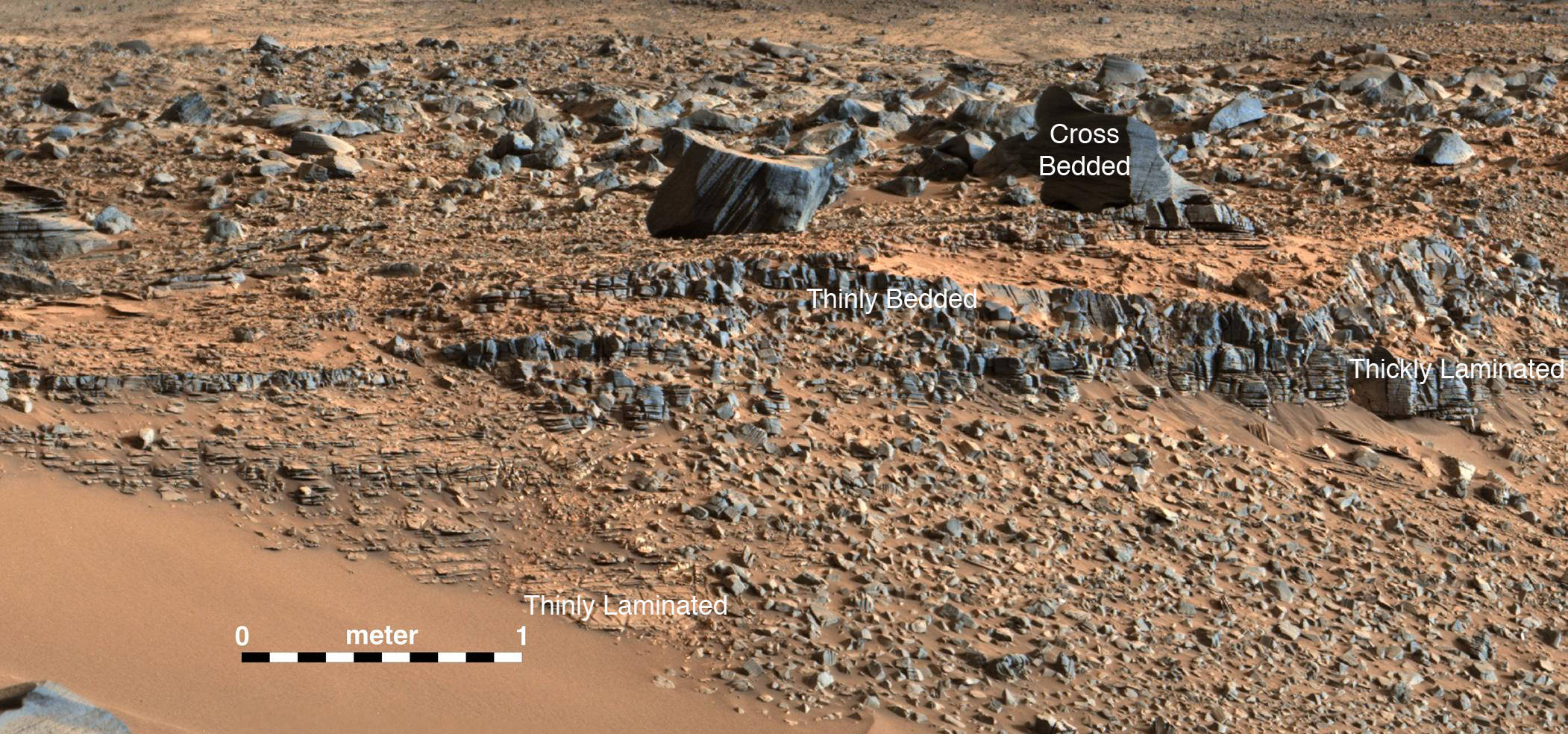
A view from the “Kimberley” formation on Mars taken by NASA’s Curiosity rover. The strata in the foreground dip towards the base of Mount Sharp, indicating flow of water toward a basin that existed before the larger bulk of the mountain formed. This image was taken by the Mast Camera (Mastcam) on Curiosity on Sol 580 of the mission and has been “white balanced” to adjust for the lighting on Mars make the sky appear light blue. Credits: NASA/JPL-Caltech/MSSS
Story/imagery updated[/caption]
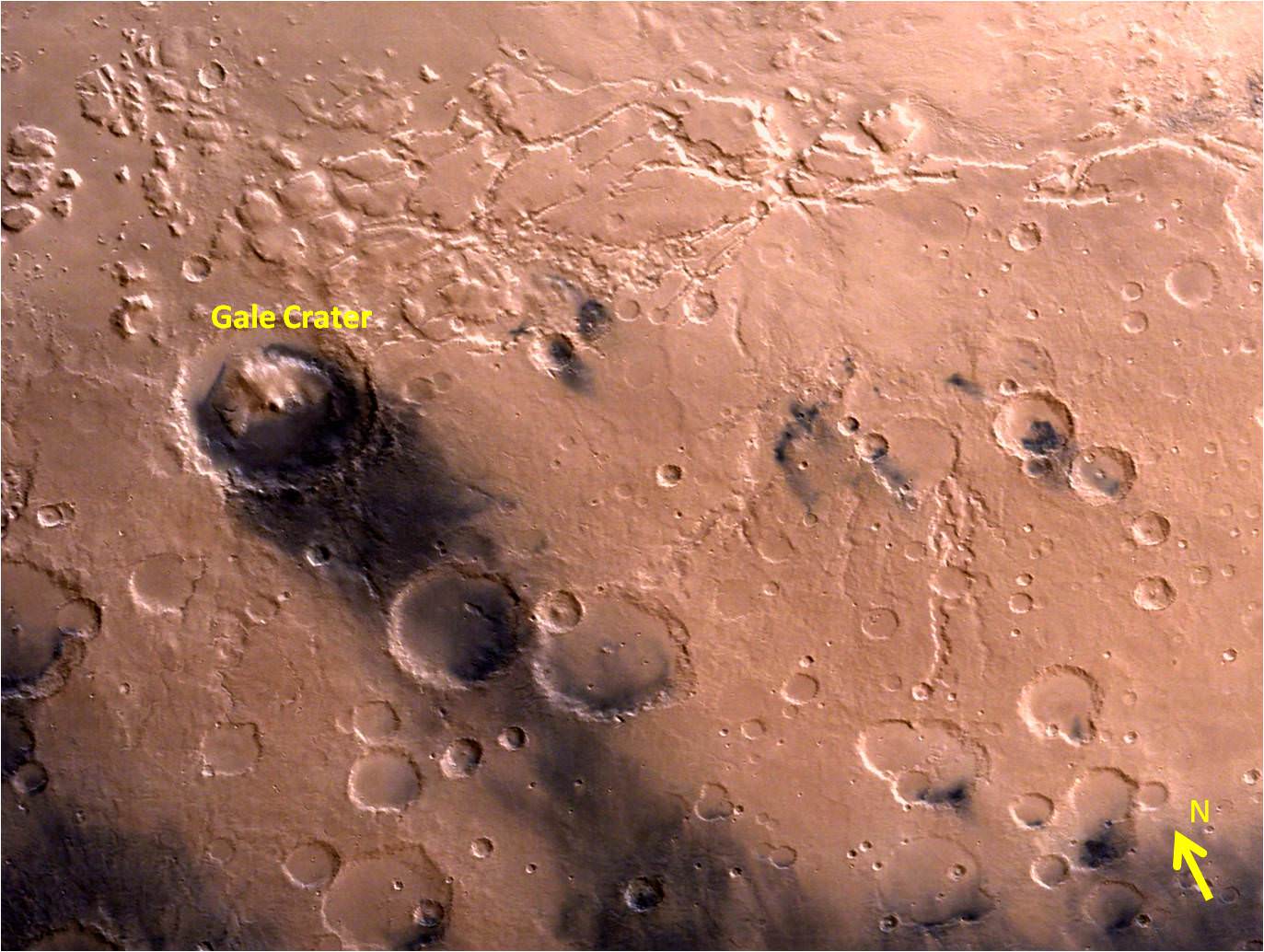
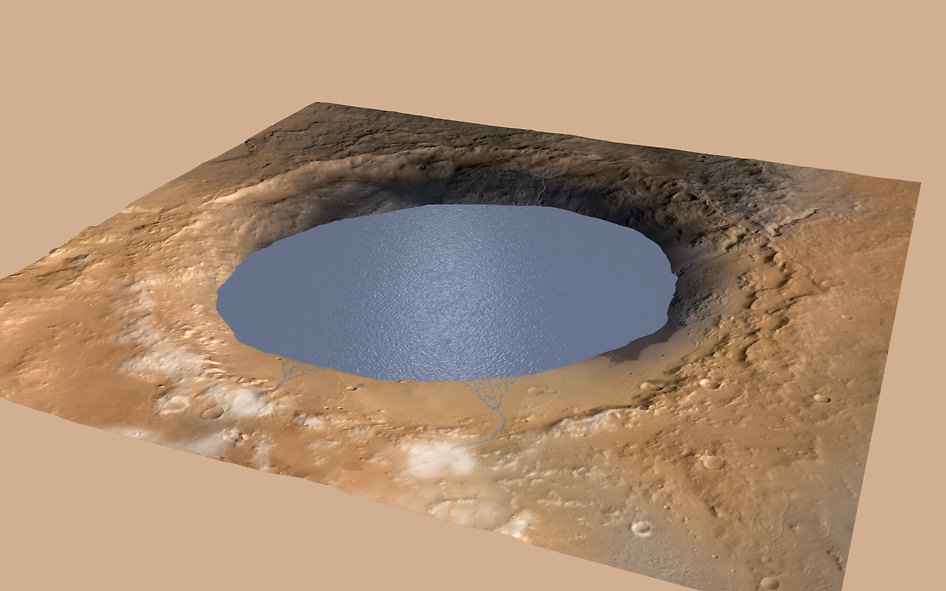
Hot on the heels of NASA’s groundbreaking announcement on Sept. 28 of the discovery that “liquid water flows intermittently” across multiple spots on the surface of today’s Mars, scientists leading NASA’s Curiosity rover mission have confirmed that an ancient lake once filled the Gale Crater site which the robot has been methodically exploring since safely landing back in August 2012 near the base of a layered mountain known as Mount Sharp.
The new research finding from the Curiosity team was just published in the journal Science on Friday, Oct. 9, and boosts the chances that alien life may have taken hold in the form of past or present day Martian microbes.
The article is titled “Wet Paleoclimate of Mars Revealed by Ancient Lakes at Gale Crater,” with John Grotzinger, the former project scientist for the Mars Science Laboratory (MSL) mission at the California Institute of Technology in Pasadena, as lead author of the new report.
The new study is coauthored by four dozen team members intimately involved in Curiosity’s ongoing exploits and “confirmed that Mars was once, billions of years ago, capable of storing water in lakes over an extended period of time.”
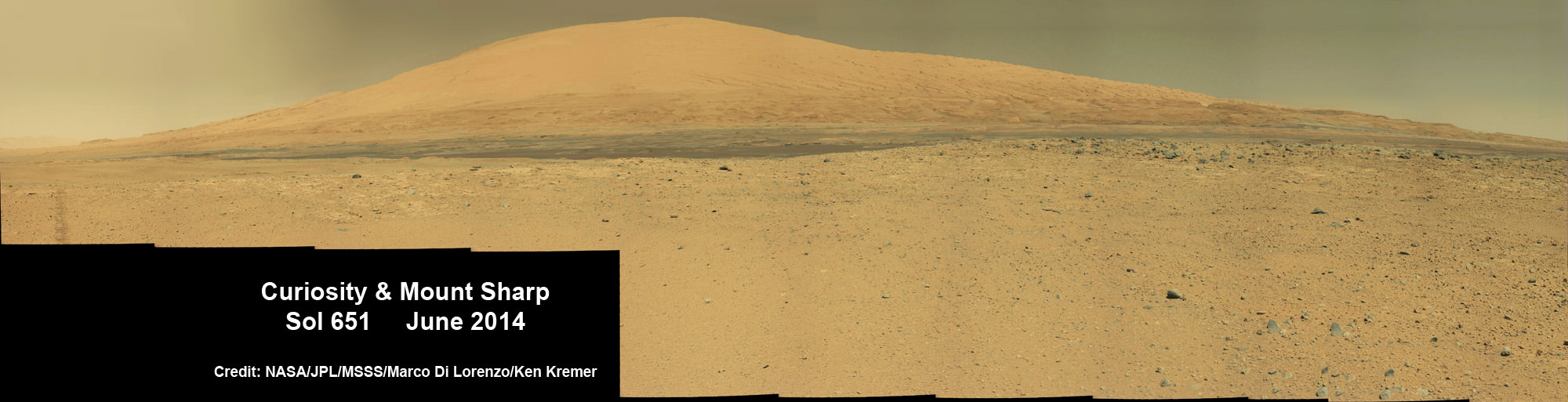
“Observations from the rover suggest that a series of long-lived streams and lakes existed at some point between about 3.8 to 3.3 billion years ago, delivering sediment that slowly built up the lower layers of Mount Sharp,” said Ashwin Vasavada, current MSL project scientist at NASA’s Jet Propulsion Laboratory in Pasadena, California, and co-author of the new report, in a statement.
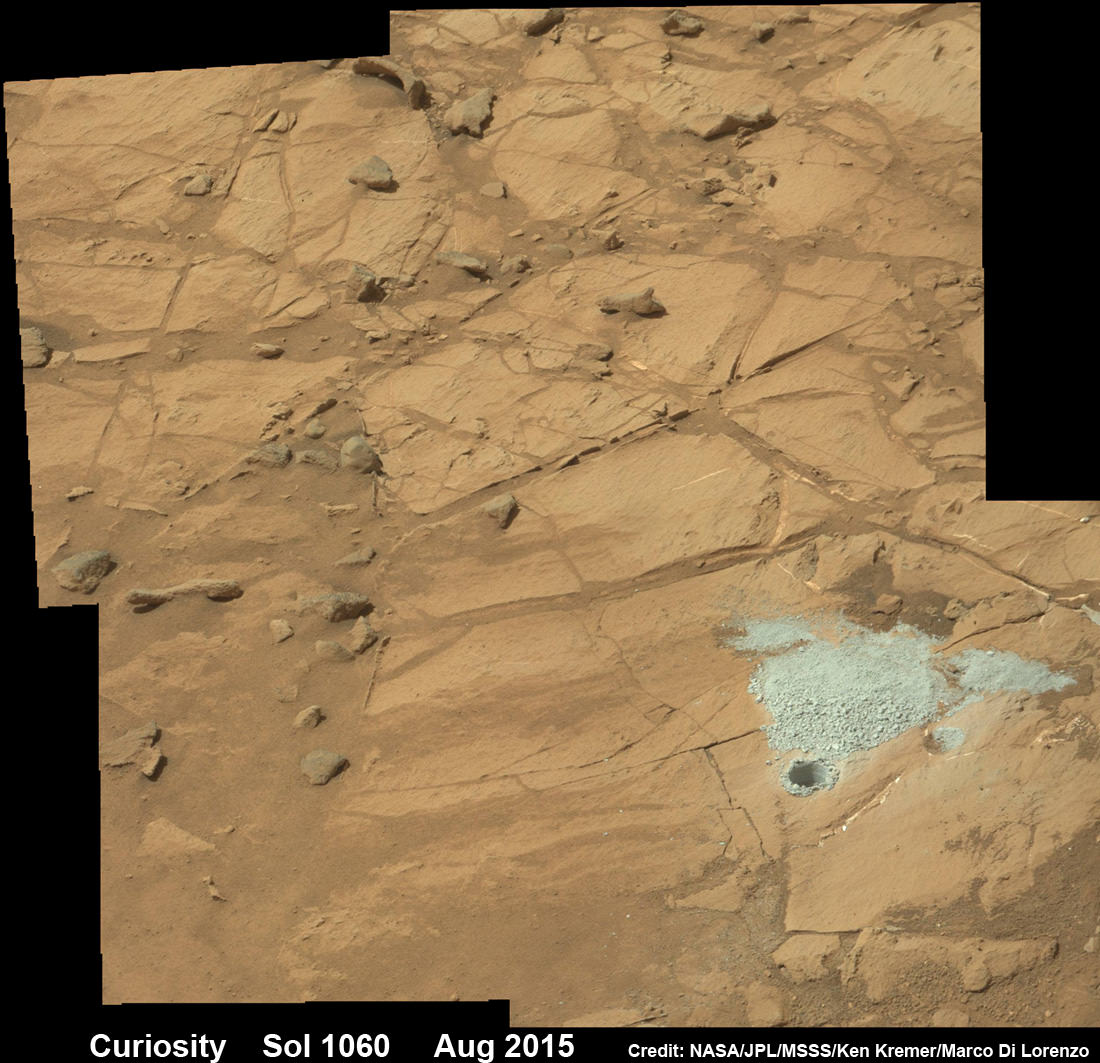
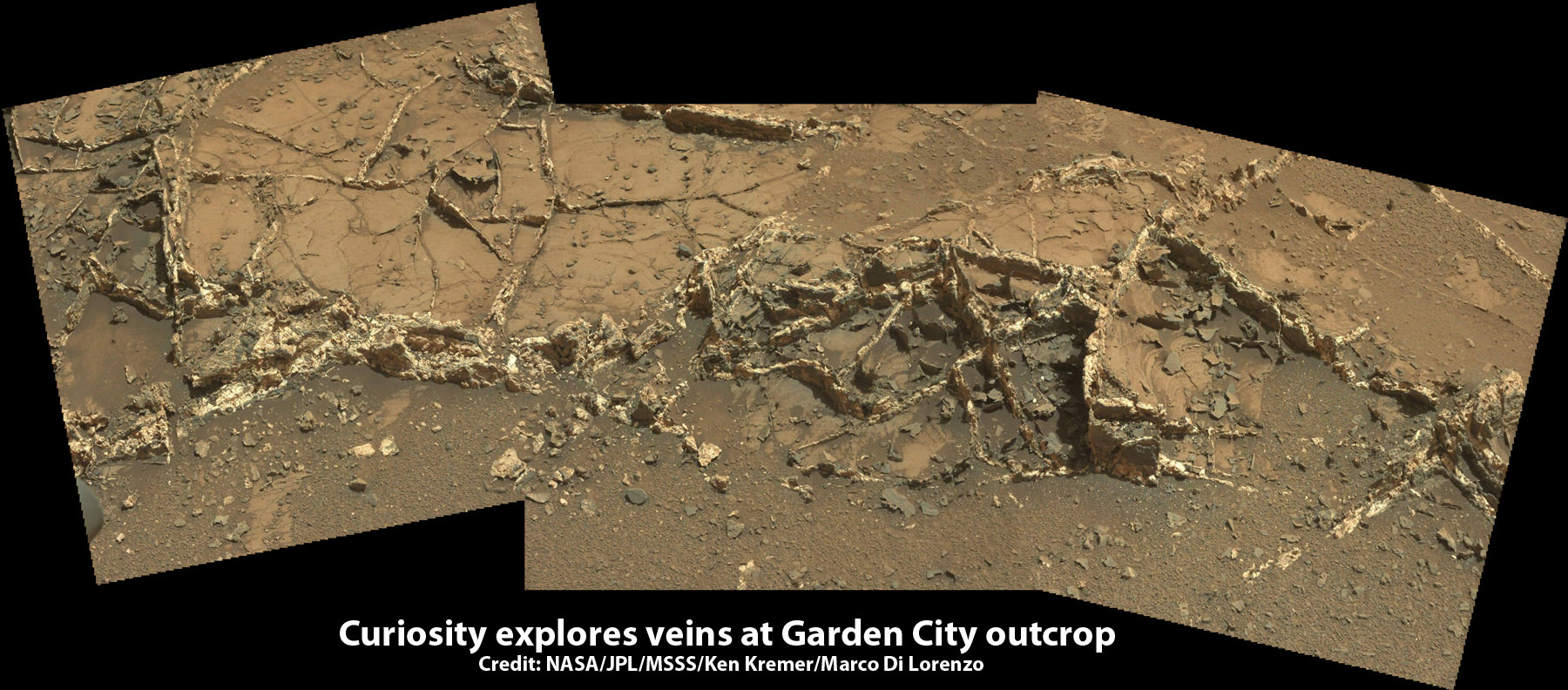
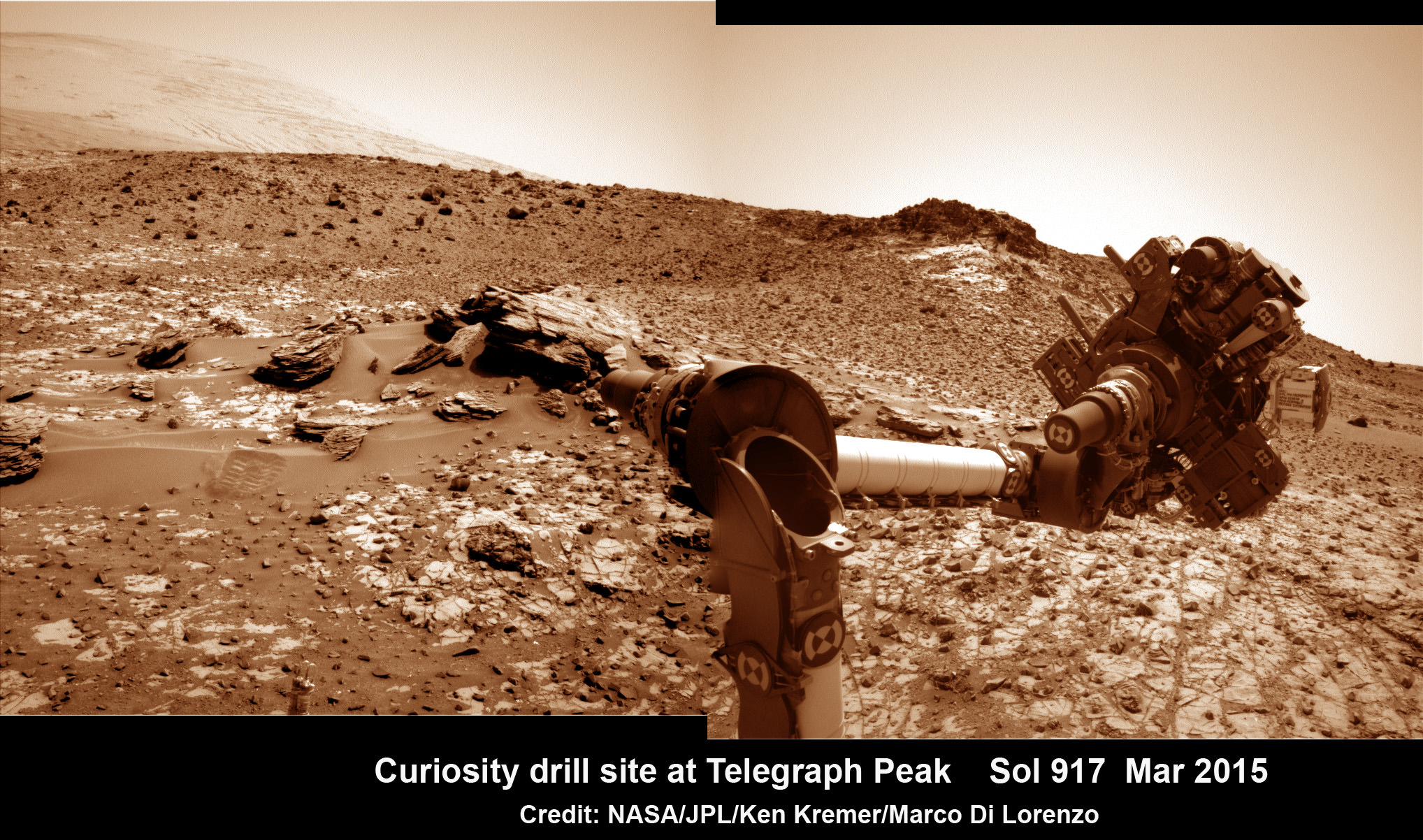
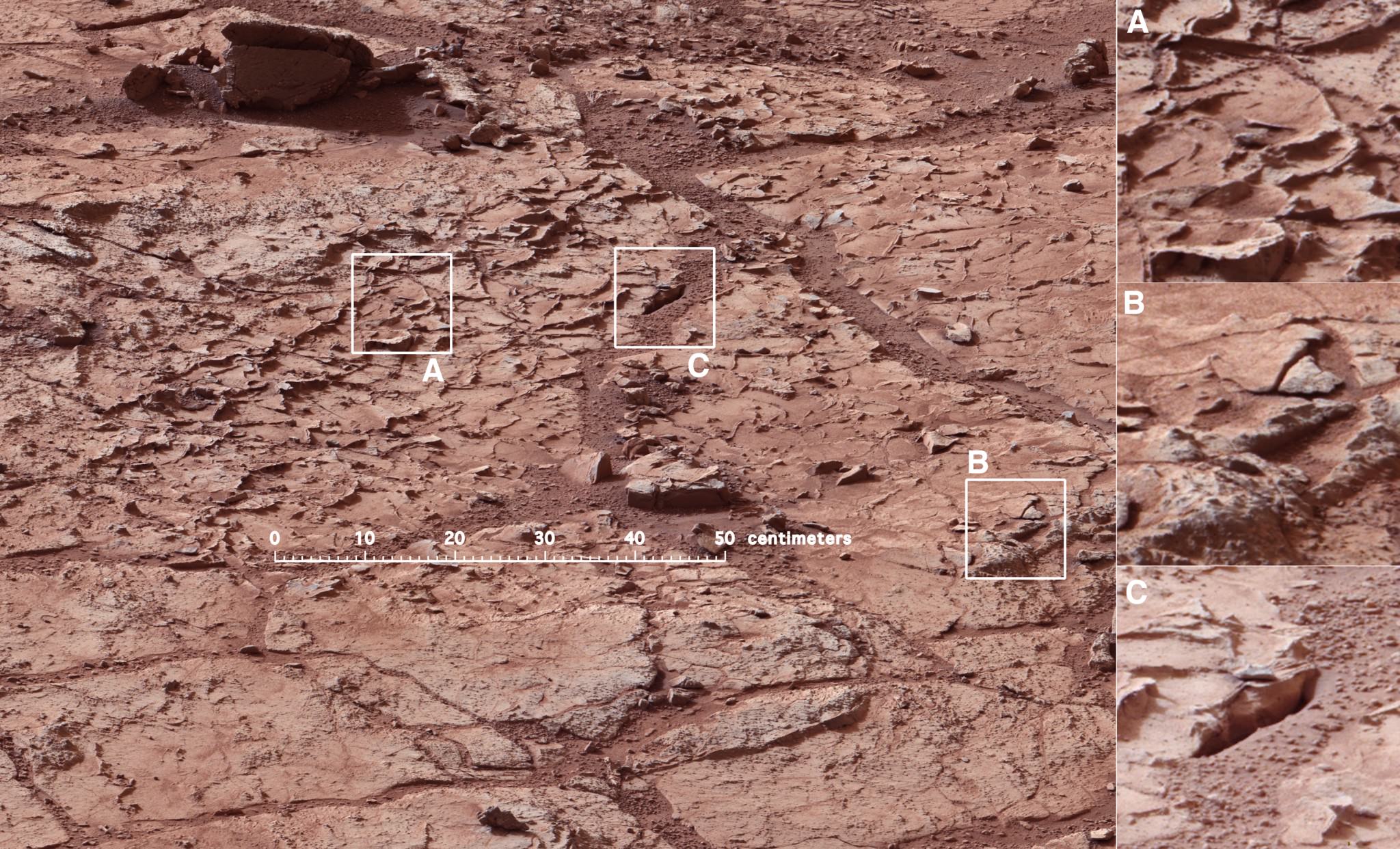
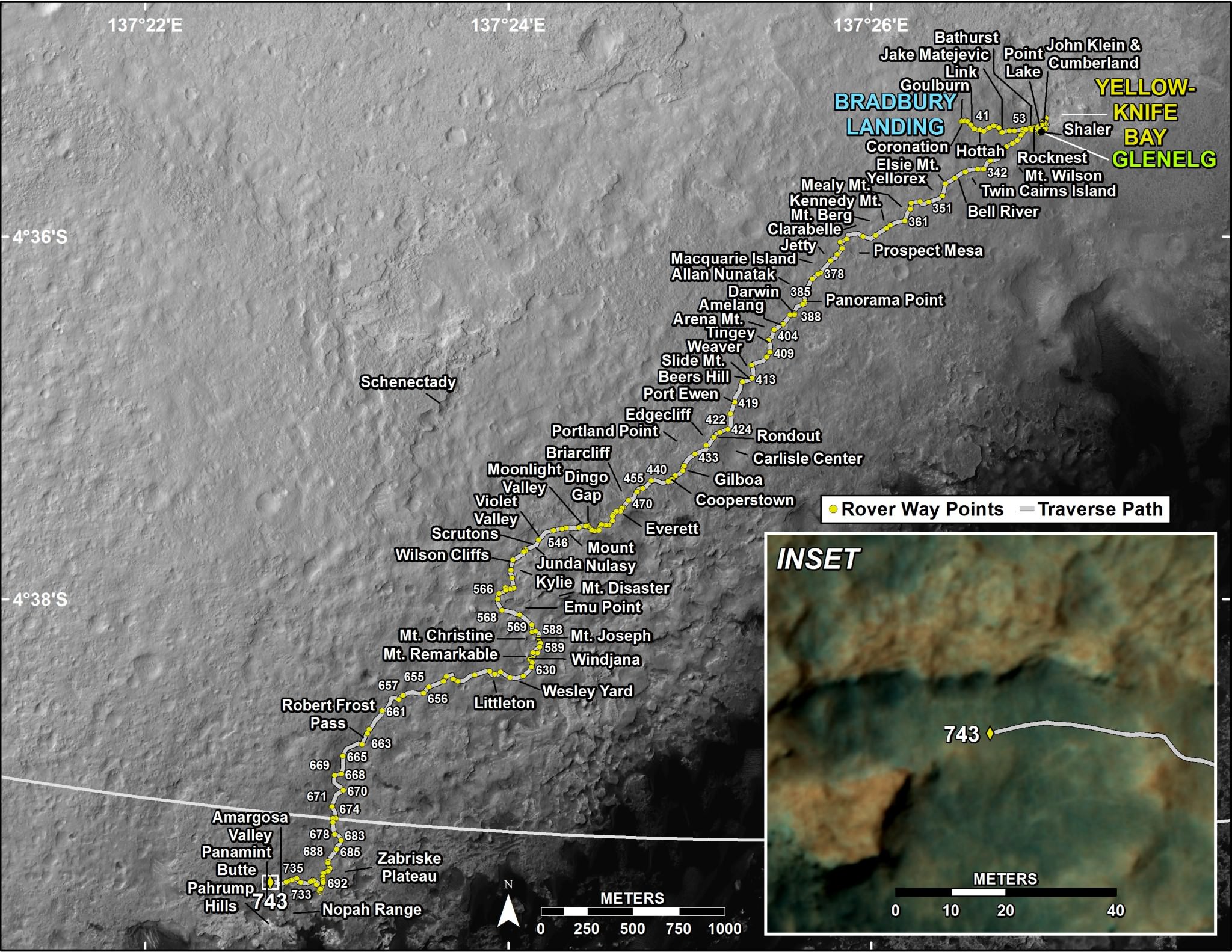
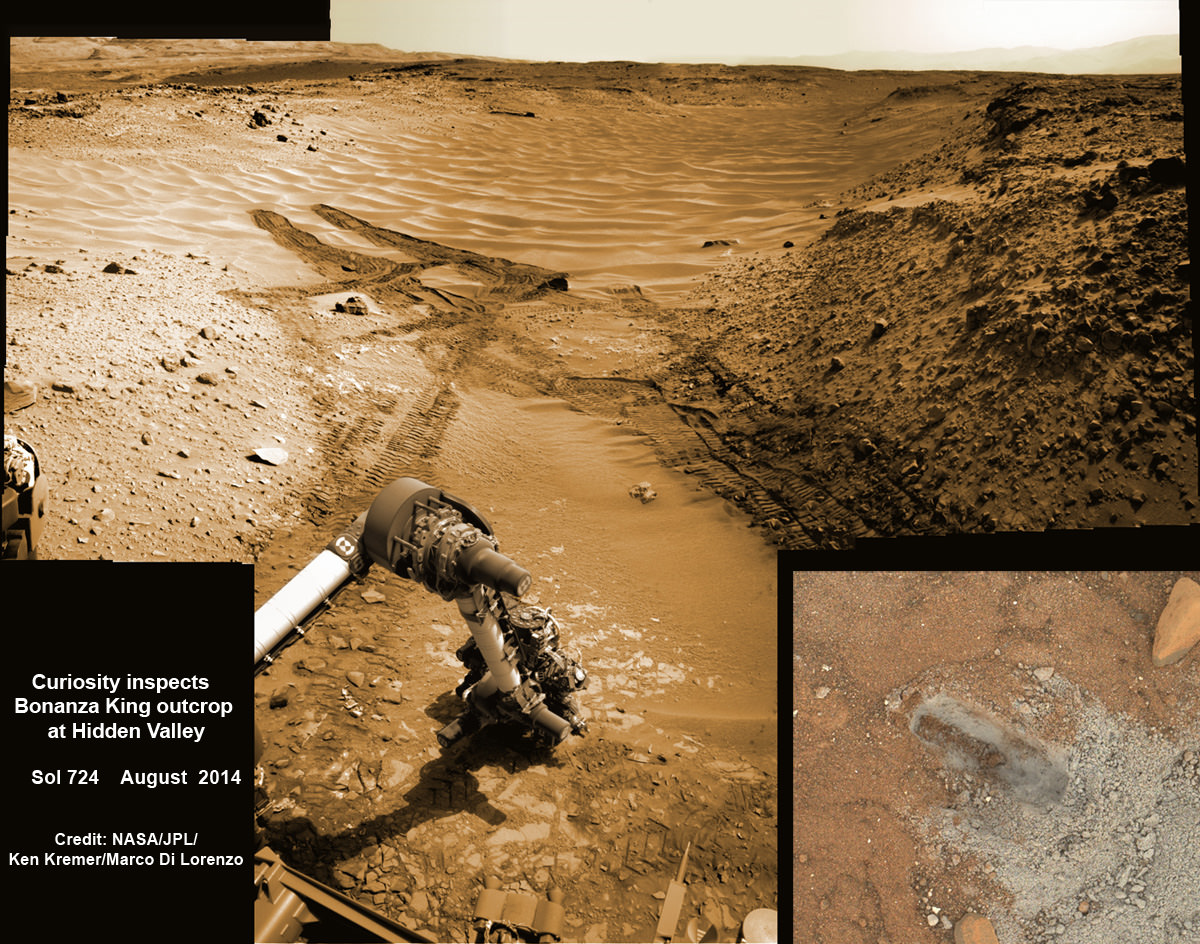
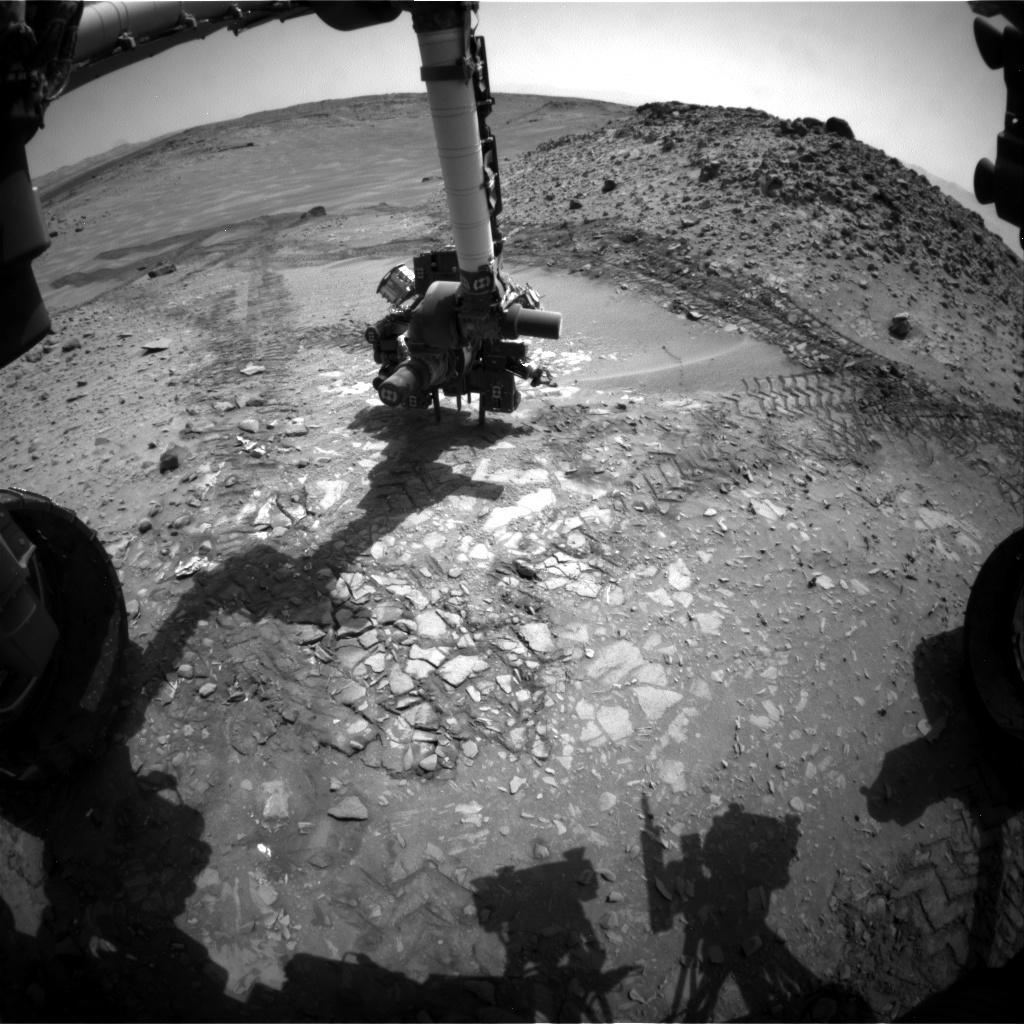
Over the past three years, the Curiosity Mars Science Laboratory rover has been traversing the floor of Gale Crater investigating scores of different rocks and outcrops with her suite of state-of-the-art instruments, and painstakingly analyzing drill samples cored from their interiors with a pair of chemistry labs to elucidate the history of Mars based on NASA’s “follow the water” mantra.
The soundness of NASA Mars exploration strategy has repeatedly borne fruit and is now validated by overwhelming measurements gathered during Curiosity’s epic Martian trek confirming the existence of a lake where Mount Sharp now stands.
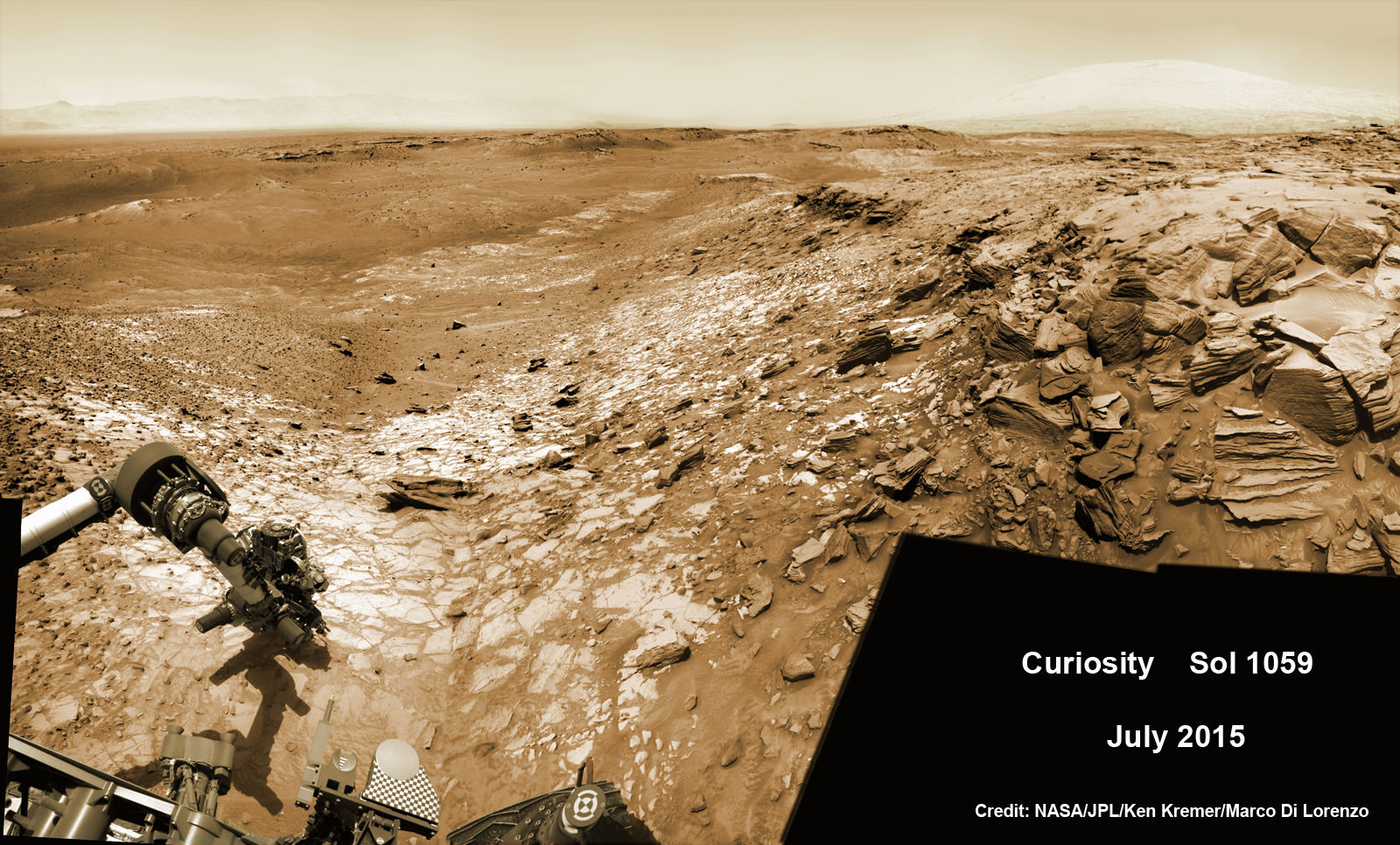
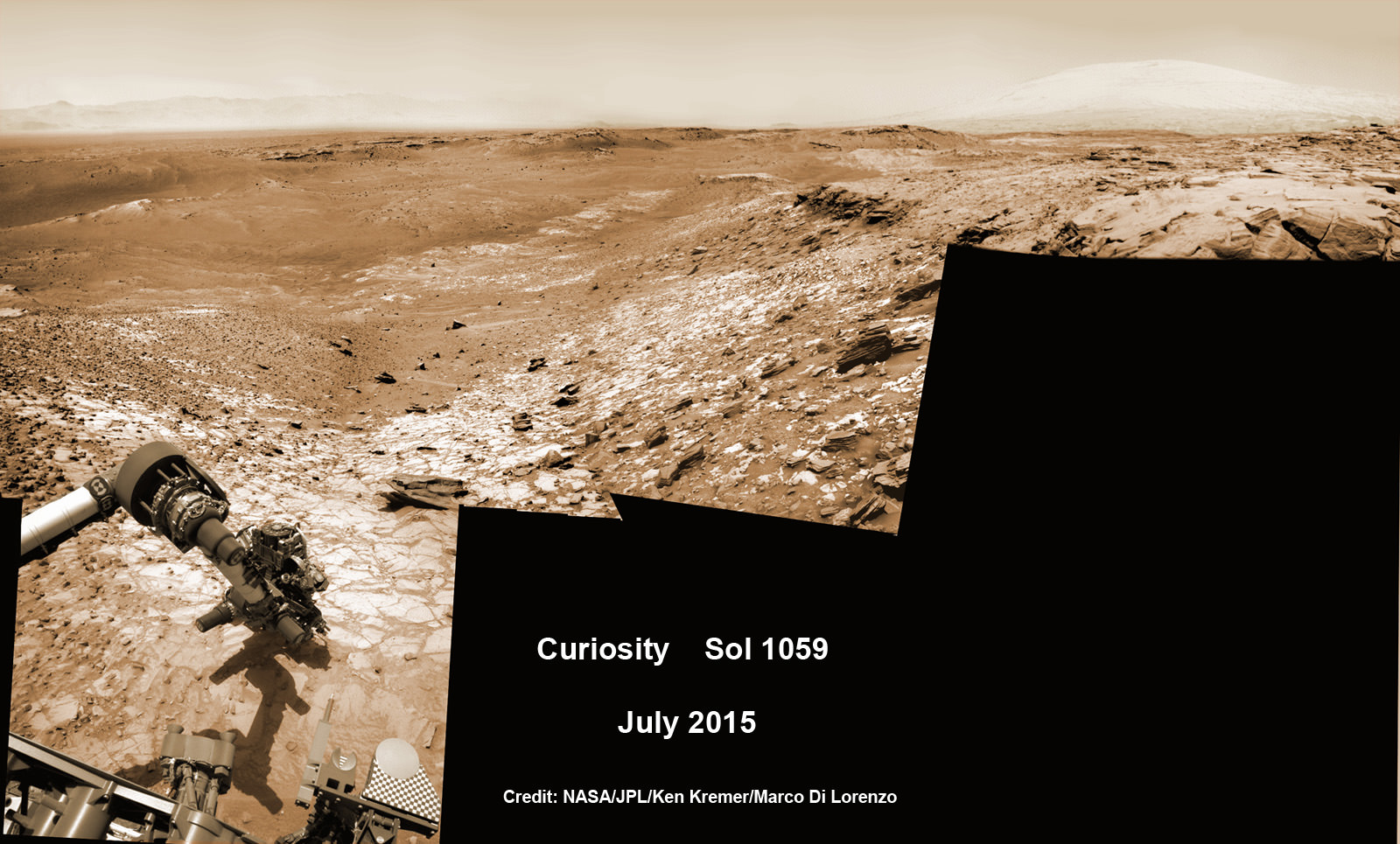
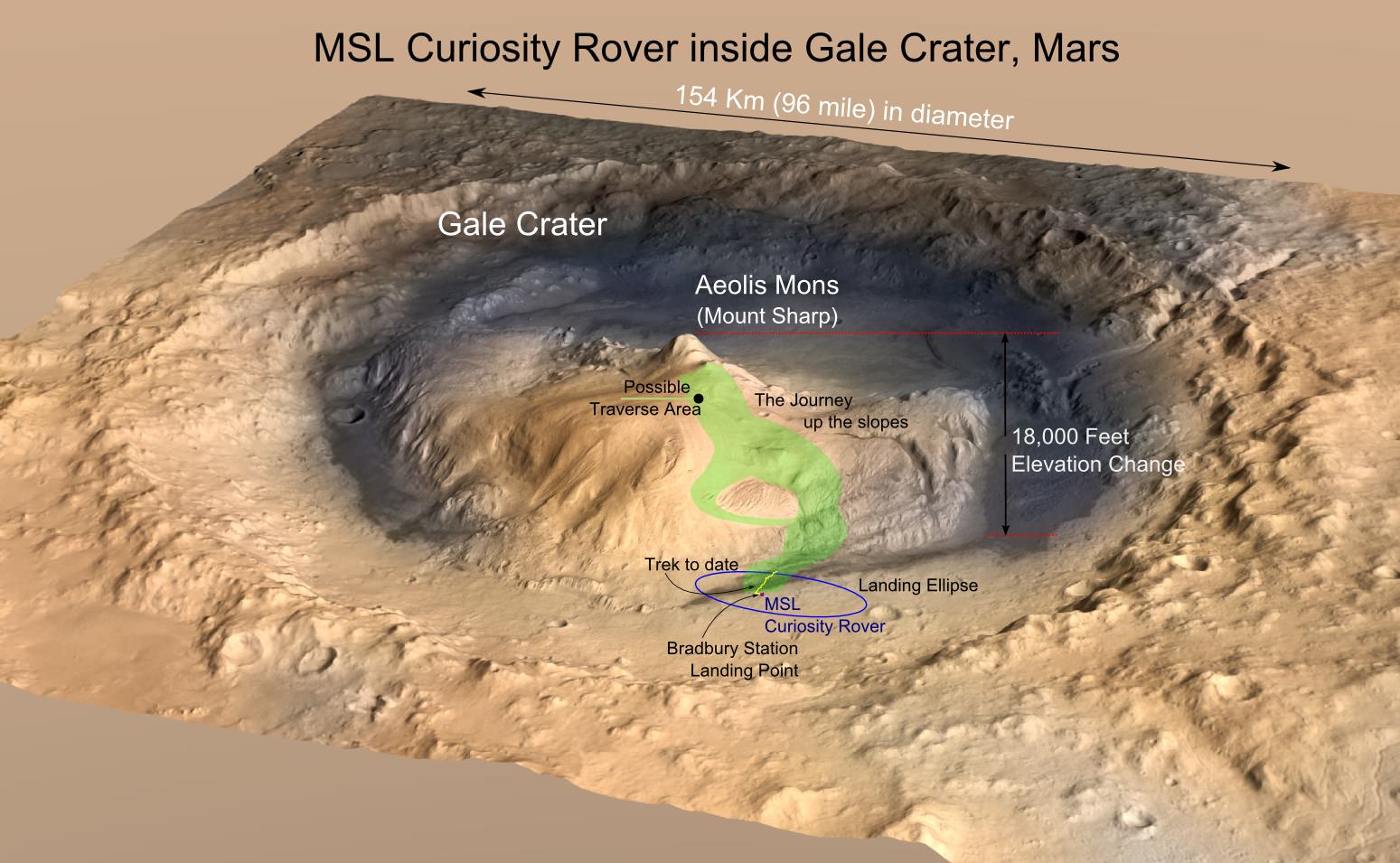
Exploring the sedimentary layers of Mount Sharp, which towers 3.4 miles (5.5 kilometers) into the Martian sky, is the primary destination and goal of the rovers long term scientific expedition on the Red Planet.
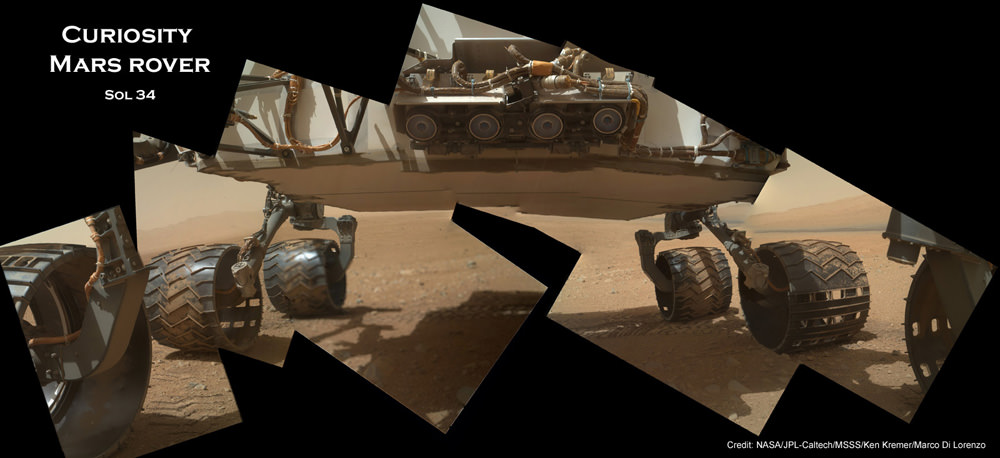
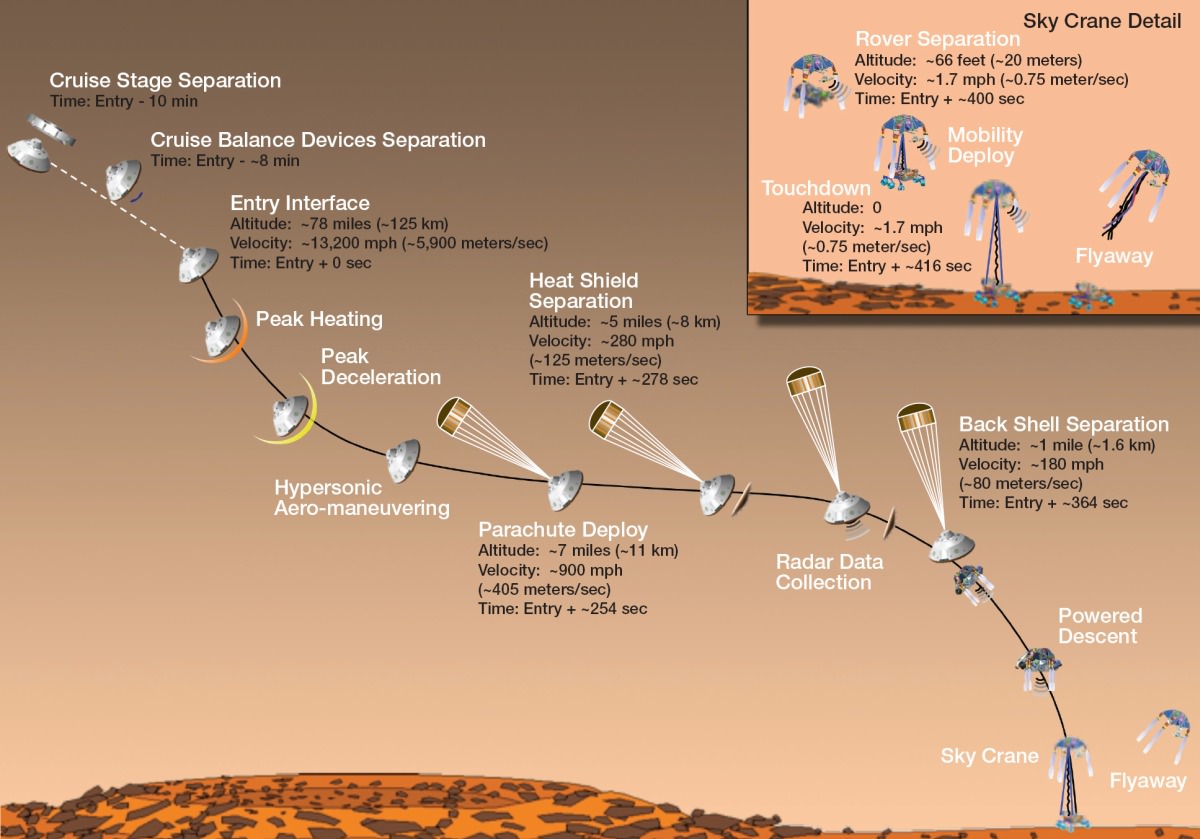
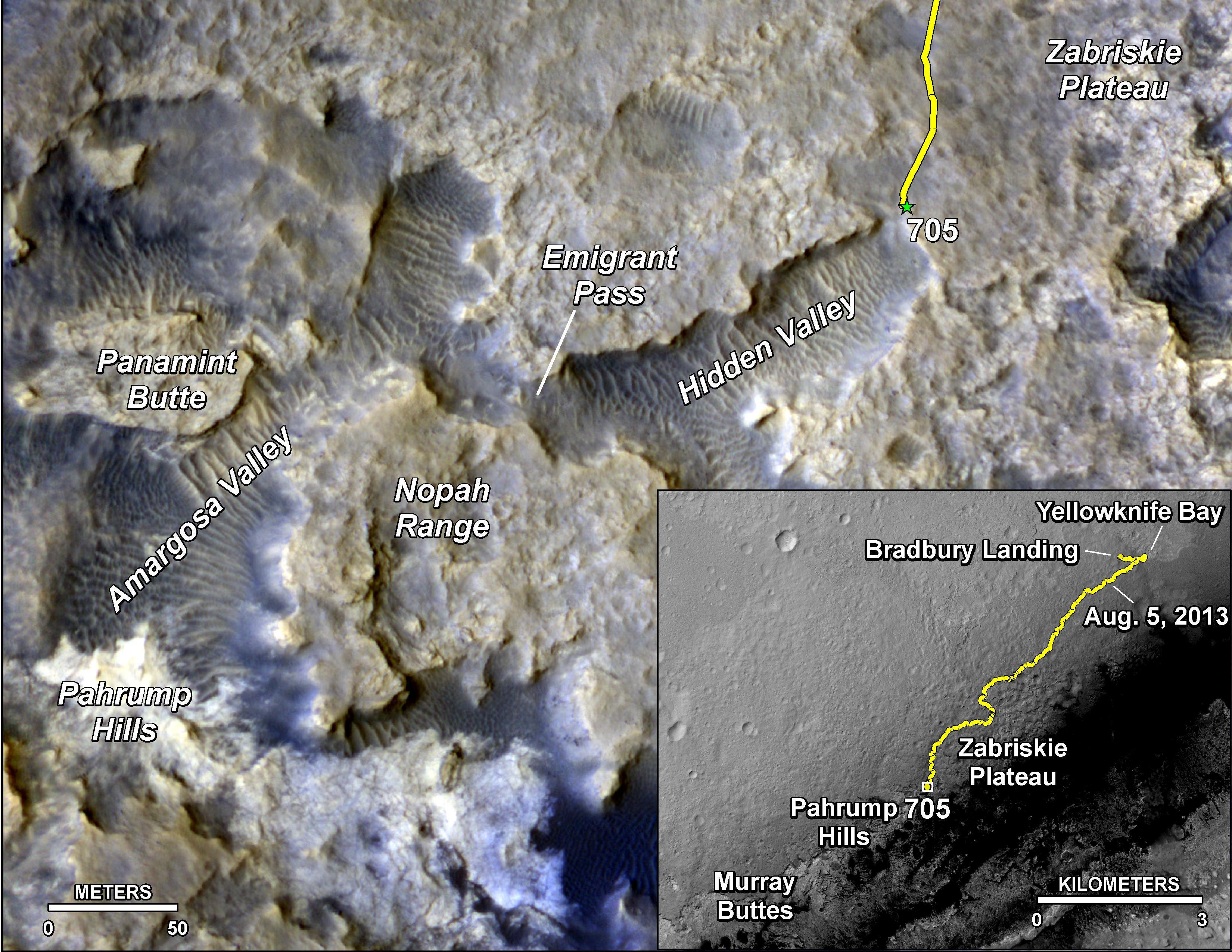
Since the nail biting touchdown on Aug. 5, 2012, Curiosity has been on a path towards the sedimentary layers at the lower reaches of Mount Sharp at the center of Gale Crater.
The car sized robot arrived at the foothills of Mount Sharp a year ago in September 2014, marking the start of the mountains formal investigation.
But the origin of Mount Sharp has been up for debate.
With the new data, researchers believe that the ancient lake helped fill Gale Crater with sediments deposited in layers over time that formed the foundation for Mount Sharp which now dominates the center of the crater.
“What we thought we knew about water on Mars is constantly being put to the test,” said Michael Meyer, lead scientist for NASA’s Mars Exploration Program at NASA Headquarters in Washington.
“It’s clear that the Mars of billions of years ago more closely resembled Earth than it does today. Our challenge is to figure out how this more clement Mars was even possible, and what happened to that wetter Mars.”
Mars was far wetter and warmer and possessed a much more massive atmosphere billions of years ago than it does today.
Gale Crater lake existed long before Mount Sharp ever formed during that period billions of years ago when the Red Planet was far warmer and wetter.
“Paradoxically, where there is a mountain today there was once a basin, and it was sometimes filled with water,” said Grotzinger, in a statement.
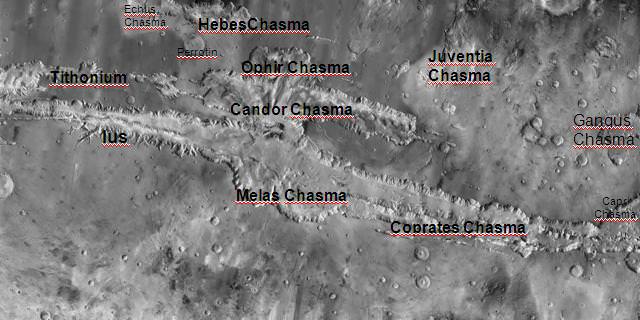
“We see evidence of about 250 feet (75 meters) of sedimentary fill, and based on mapping data from NASA’s Mars Reconnaissance Orbiter and images from Curiosity’s camera, it appears that the water-transported sedimentary deposition could have extended at least 500 to 650 feet (150 to 200) meters above the crater floor.”
Indeed there is additional evidence that the sedimentary deposits from interaction with water may be as thick as one-half mile (800 meters) above the crater floor. However beyond that there is no evidence of hydrated strata further up Mount Sharp.
But for reasons we are still trying to decipher and comprehend, Mars underwent radical climactic change between 3 and 4 billion years ago and was transformed from an ancient wet world, potentially hospitable to life, to a cold, dry desiccated world, rather inhospitable to life, that exists today.

Unlocking the mysteries, mechanisms and time periods of Mars climate change, loss of a thick atmosphere, ability to sustain liquid surface water and searching for organic compounds and for evidence of past or present habitable zones favorable to life are the questions driving NASA’s Mars Exploration program
Curiosity has already accomplished her primary objective of discovering a habitable zone on the Red Planet – at the Yellowknife Bay area – that contains the minerals necessary to support microbial life in the ancient past when Mars was far wetter and warmer billions of years ago.

“We have tended to think of Mars as being simple,” Grotzinger mused. “We once thought of the Earth as being simple too. But the more you look into it, questions come up because you’re beginning to fathom the real complexity of what we see on Mars. This is a good time to go back to reevaluate all our assumptions. Something is missing somewhere.”
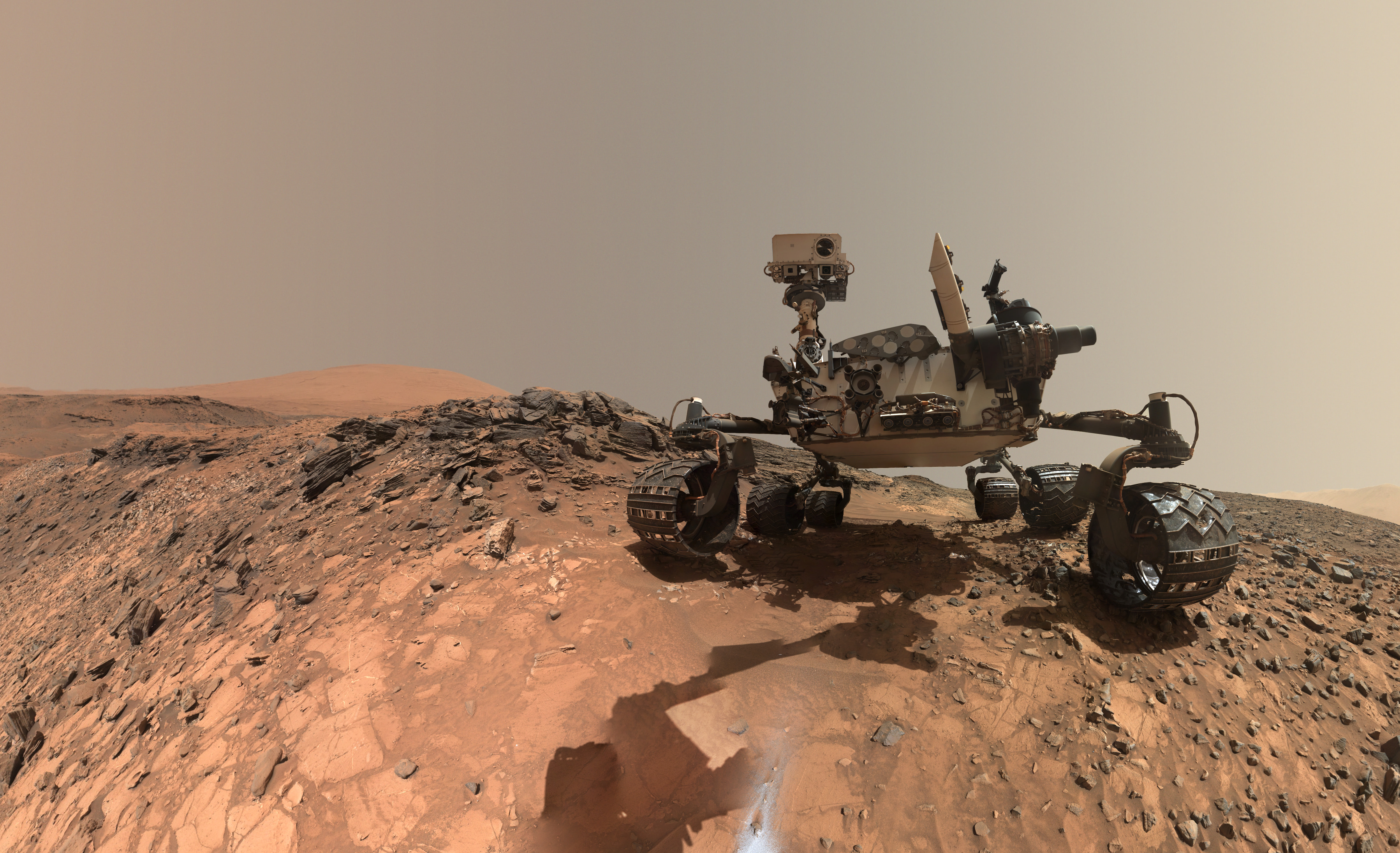
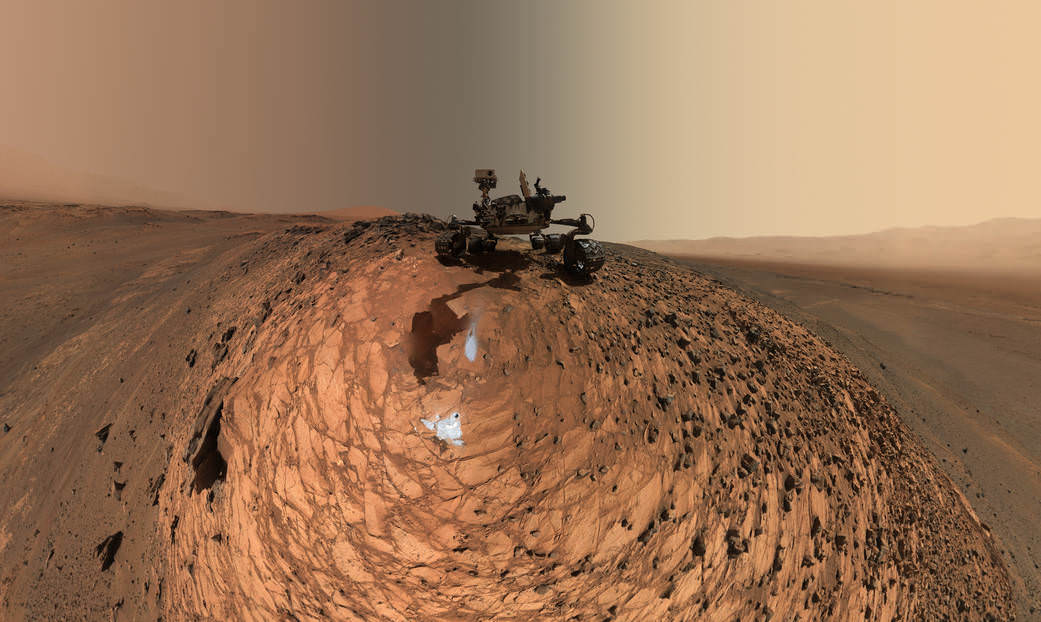
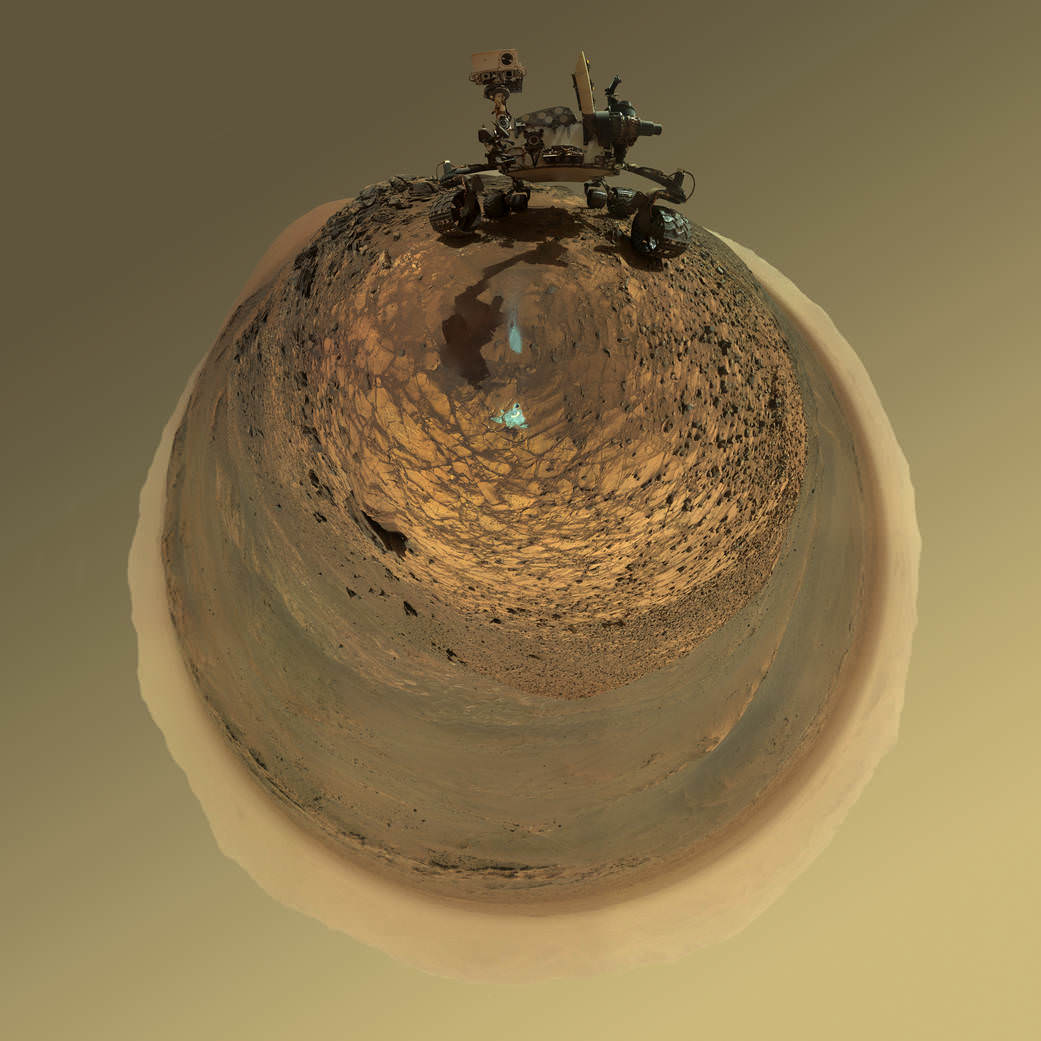
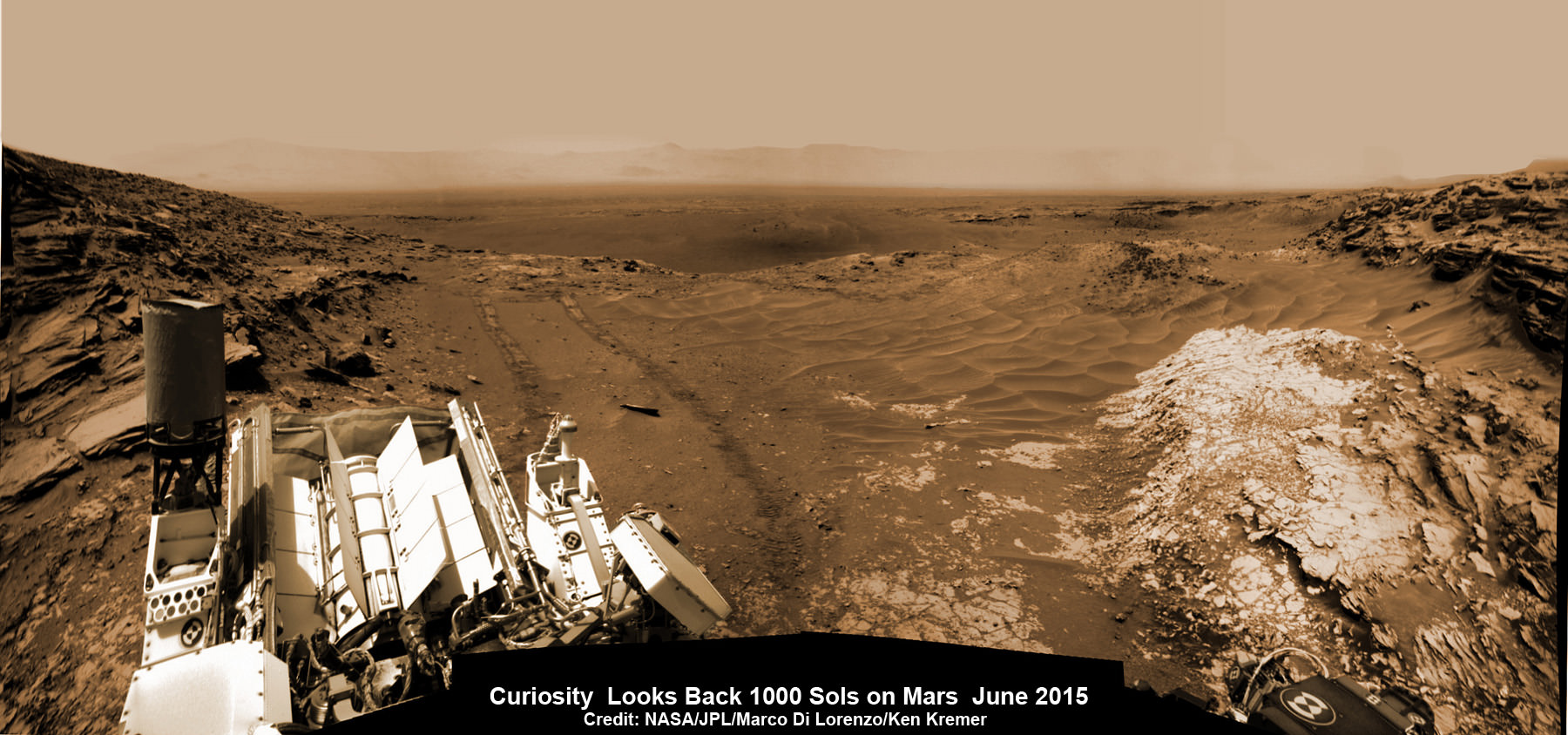
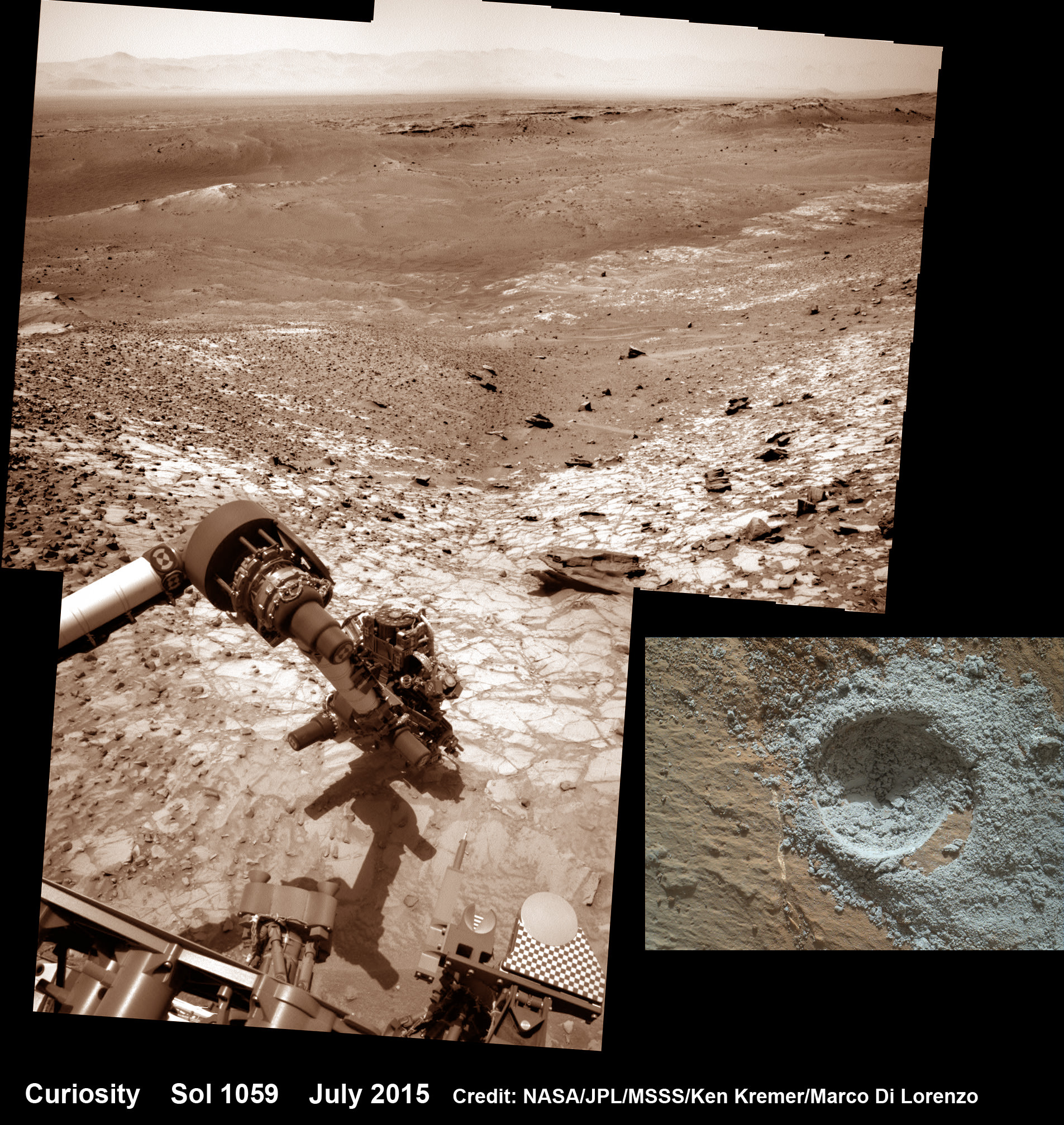
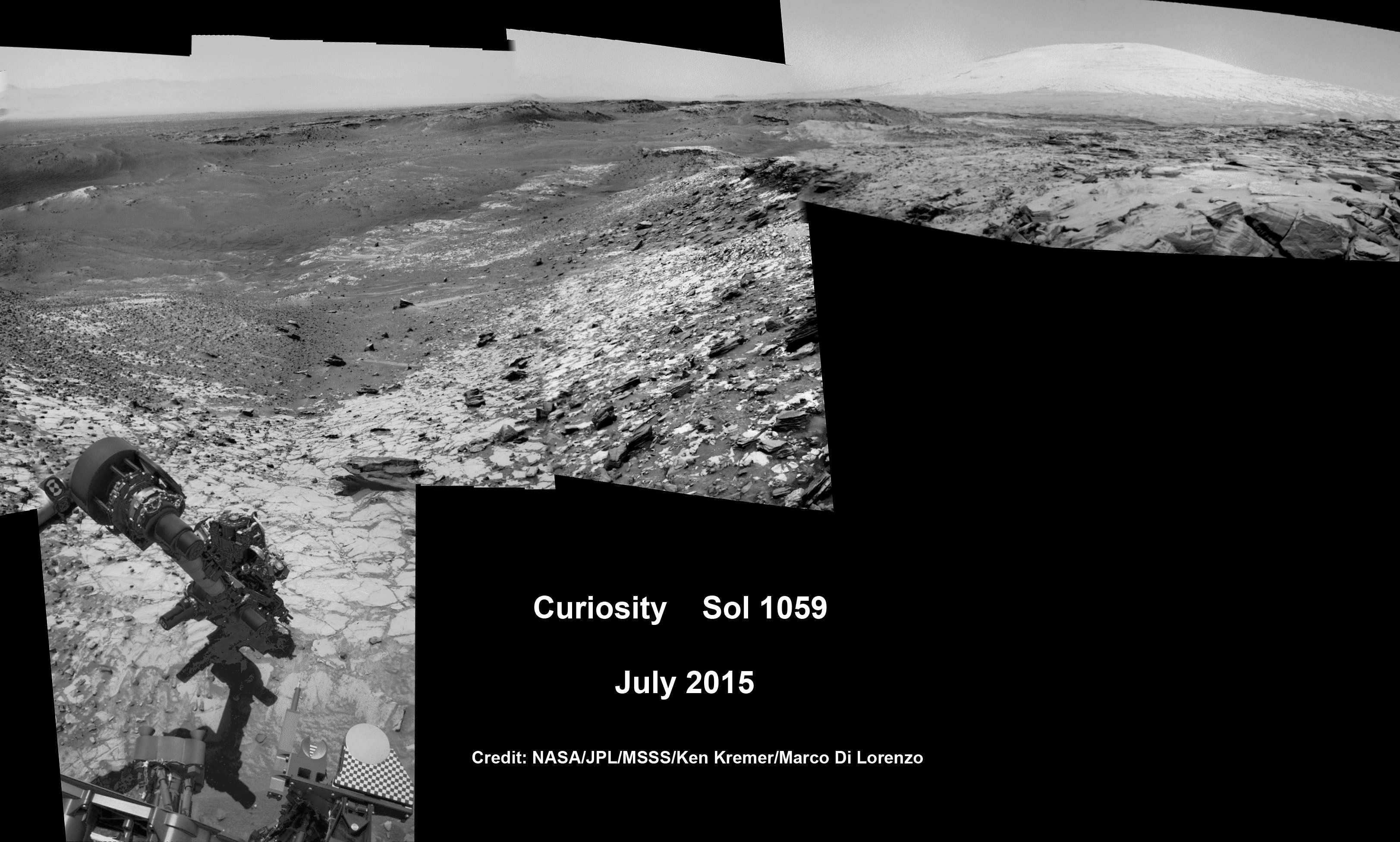
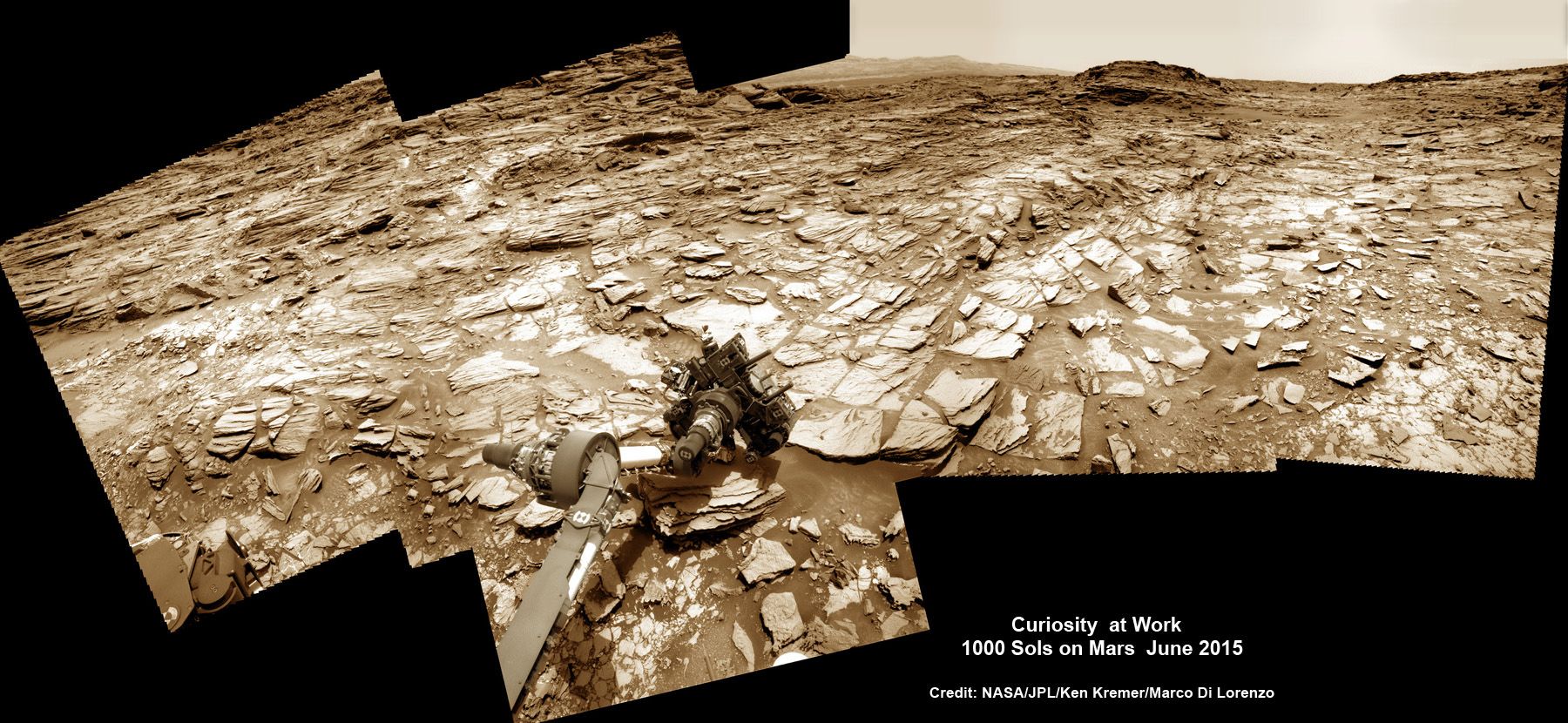
Curiosity recently celebrated 1000 Sols of exploration on Mars on May 31, 2015 – detailed here with our Sol 1000 mosaic by Marco Di Lorenzo and Ken Kremer also featured at Astronomy Picture of the Day on June 13, 2015.
As of today, Sol 1129, October 10, 2015, she has driven some 6.9 miles (11.1 kilometers) kilometers and taken over 274,000 amazing images.
Curiosity is at the vanguard of Earth’s fleet of seven robotic missions paving the path for NASA’s plans to send humans on a ‘Journey to Mars’ in the 2030s.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.