
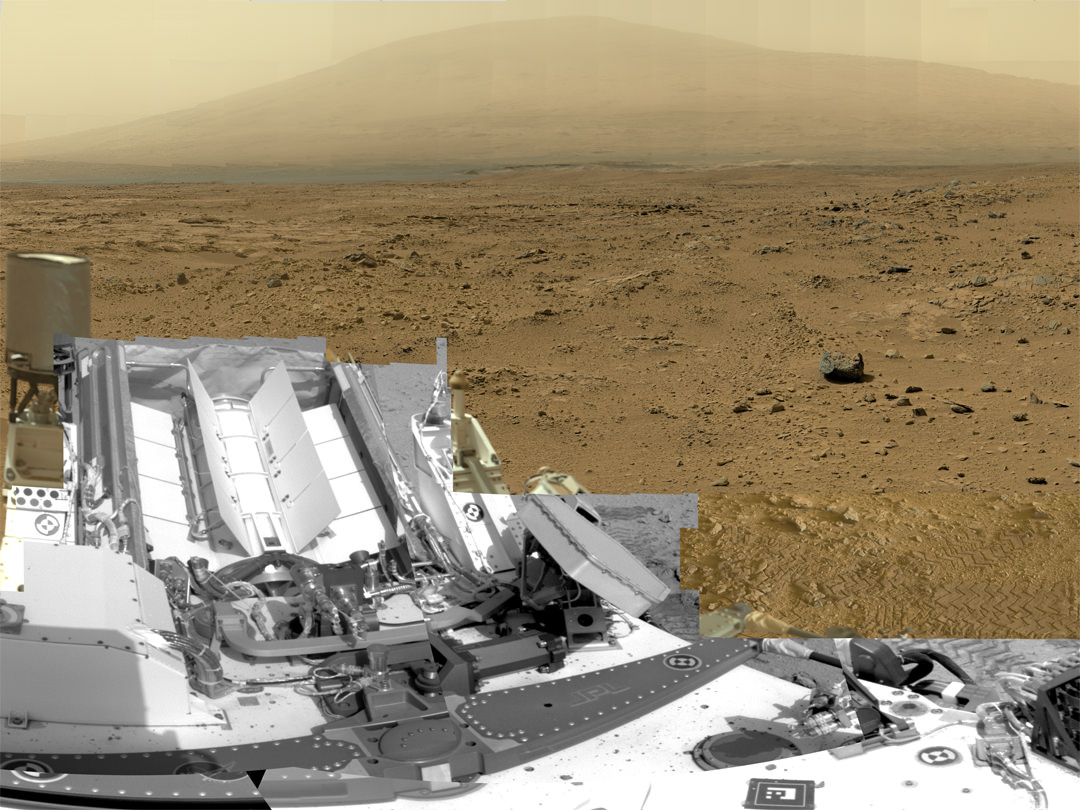
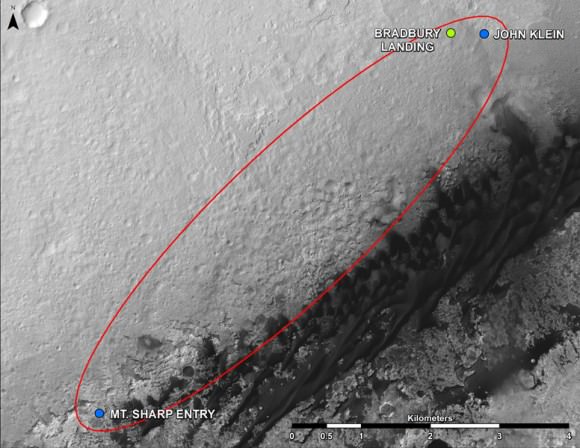
NASA’s Curiosity rover has at last begun her epic trek to the layered slopes of mysterious Mount Sharp – the mission’s primary destination which looms supreme inside the Gale Crater landing site.
Scientists expect to discover signatures of the chemical ingredients that potentially are markers for a Martian habitable zone, while climbing up Mount Sharp.
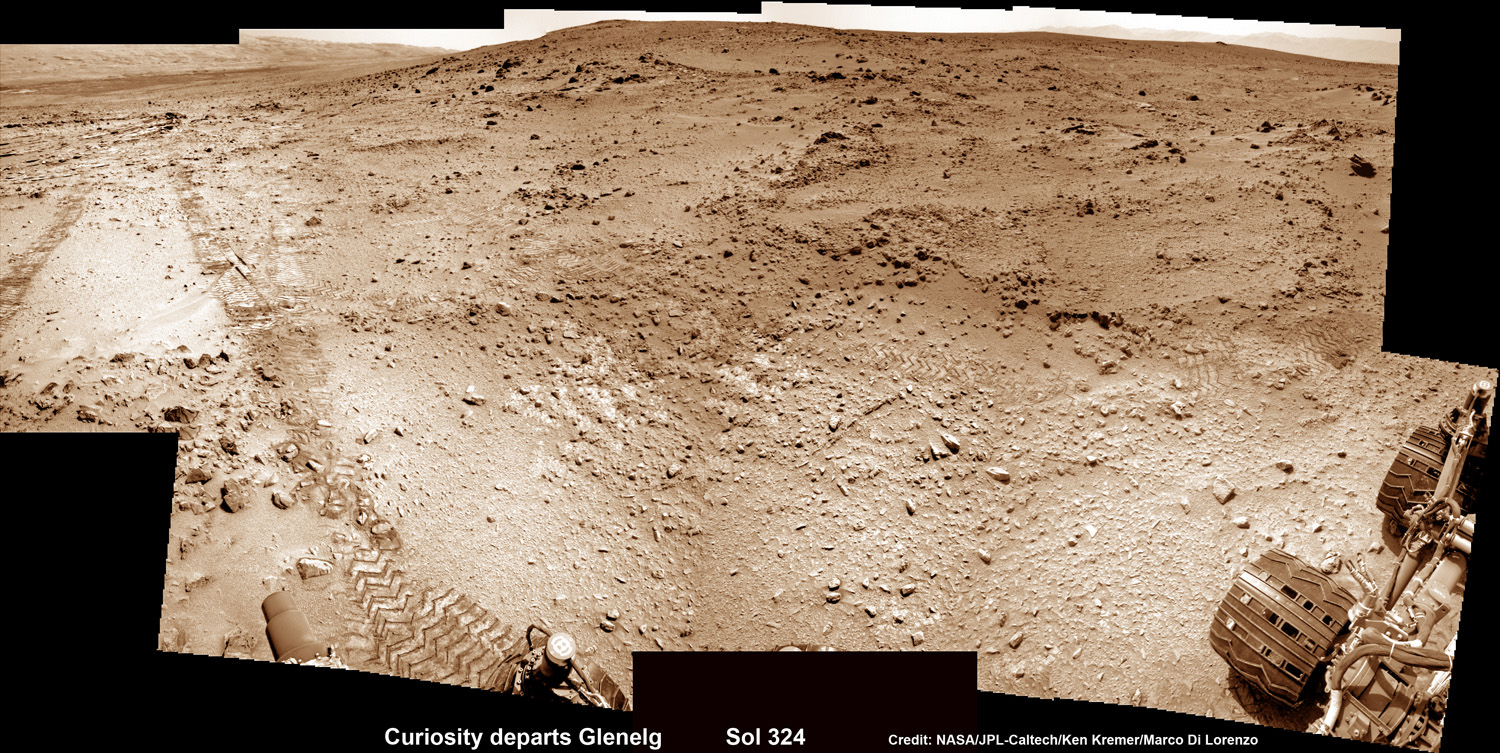
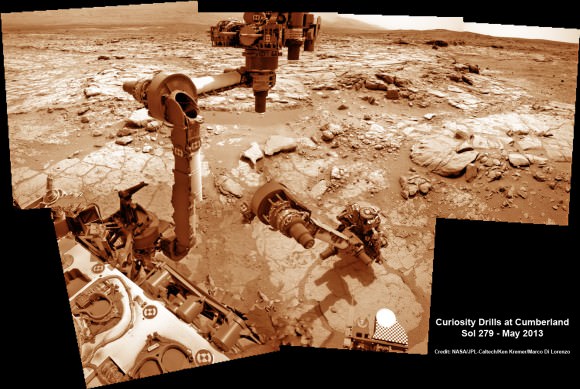
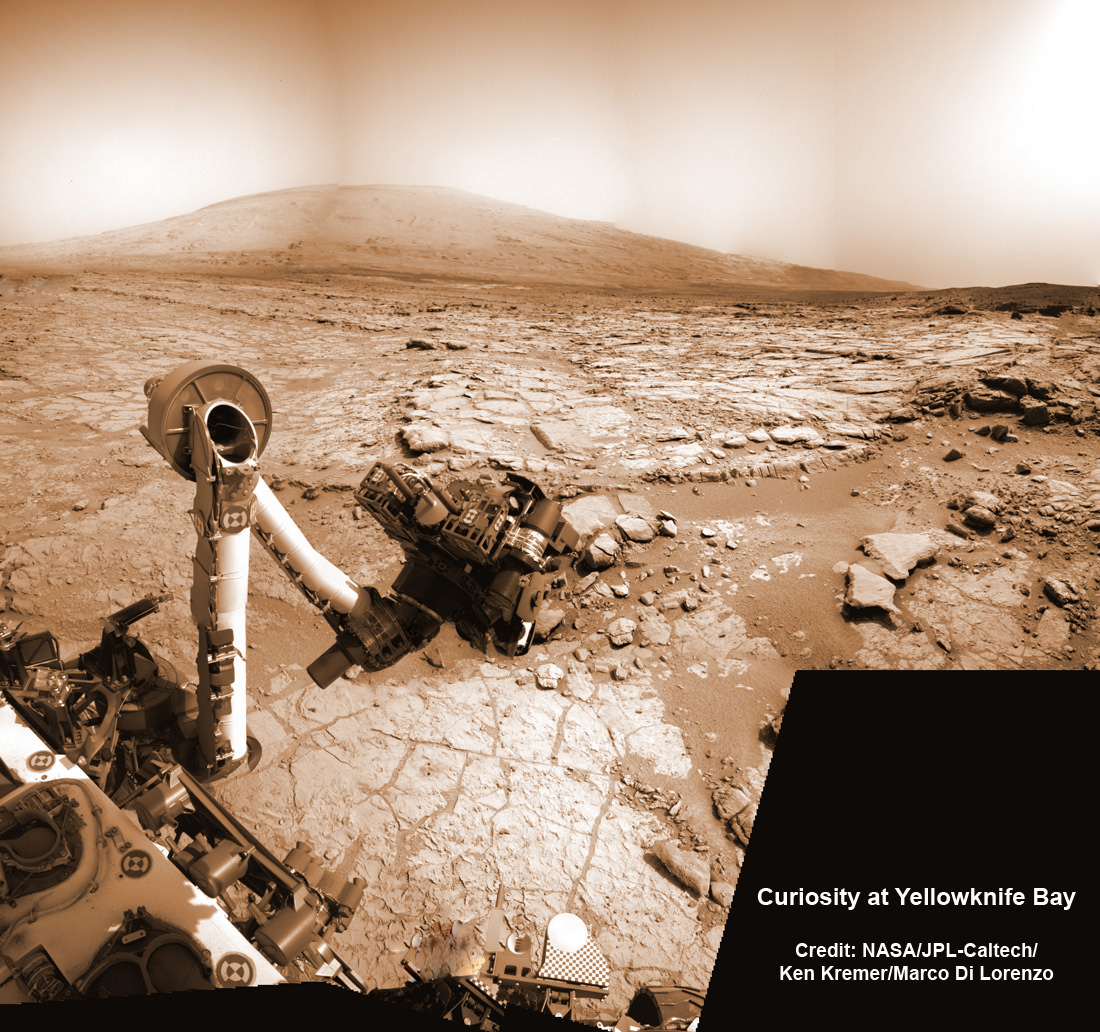
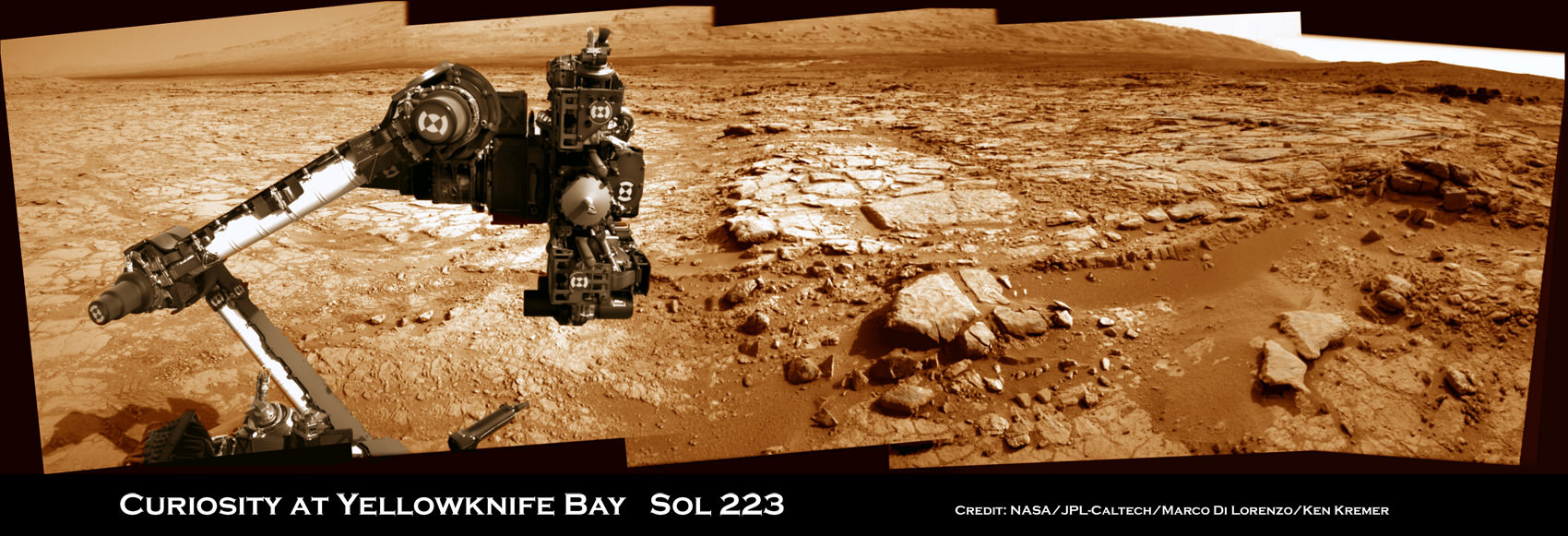
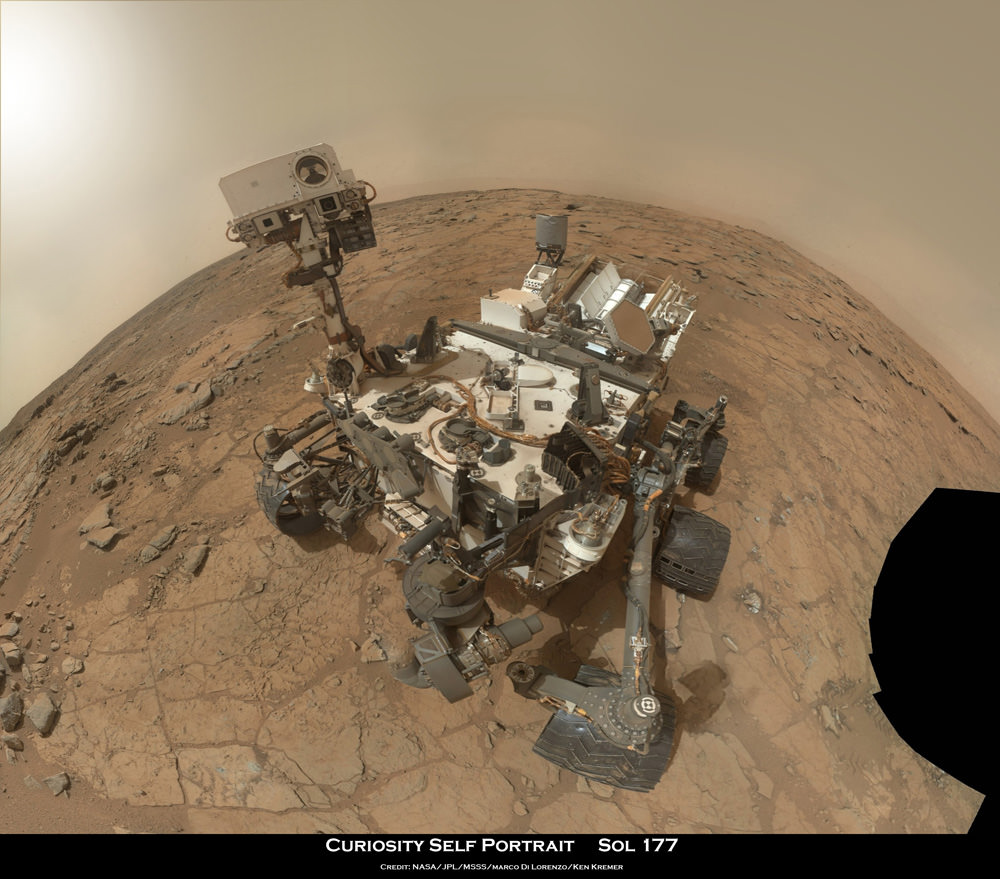
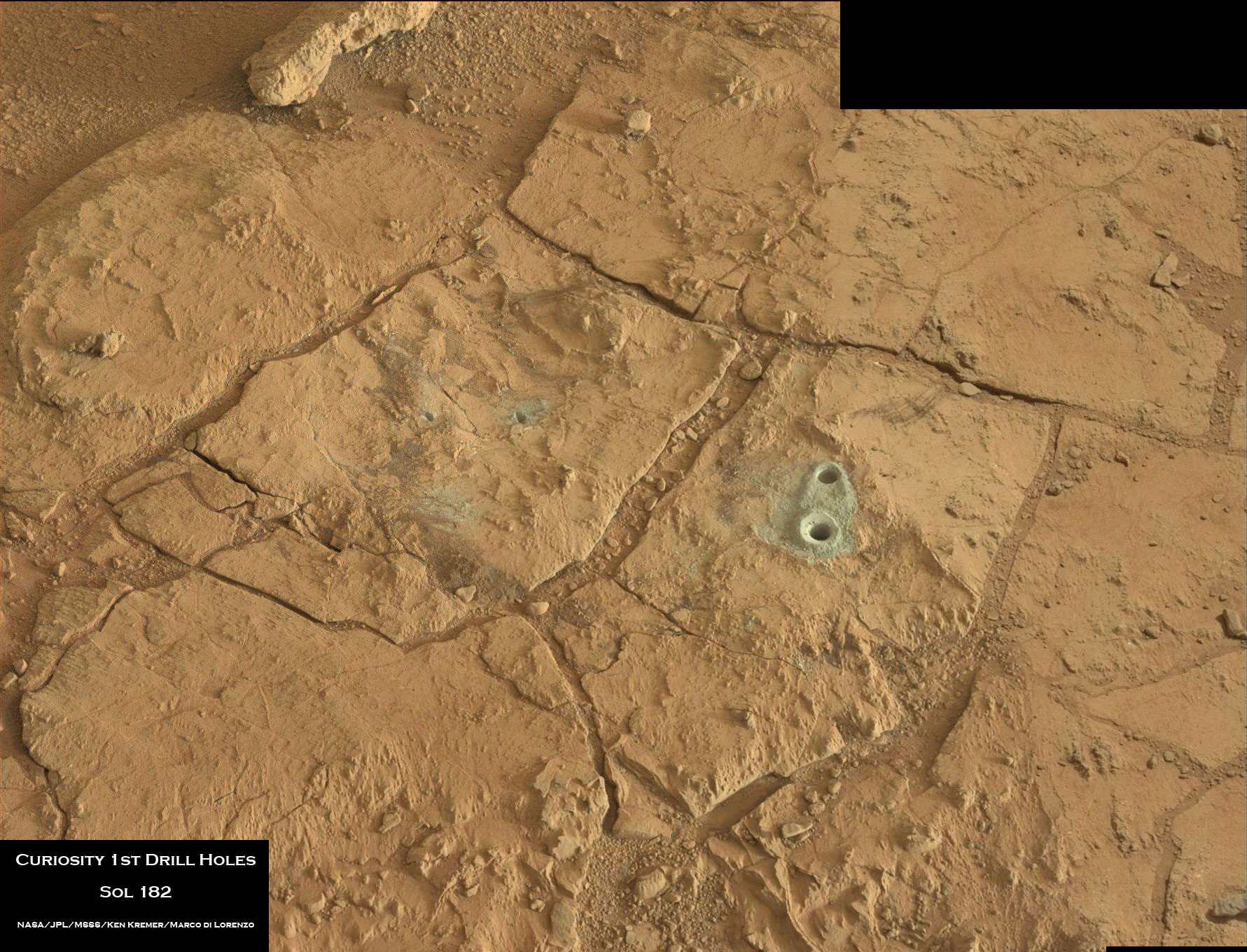
On July 4 (Sol 324), the six wheeled robot started driving away from the Glenelg and Yellowknife Bay areas where she has worked more than half a year investigating the alien terrain and drilling into Martian rocks for the first time in history.
“We have started the long traverse to the base of Mt. Sharp (Aeolis Mons), the long-term goal of the mission!” announced science team member Ken Herkenhoff of the USGS.
So far the NASA rover already driven more than 190 feet (58 meters) over two excursions on July 4 and 7, away from her last science campaign at the Shaler outcrop of cross-bedded, sedimentary outcrops. Another drive is planned today.
Billions of years of Mars geologic history are preserved in the sedimentary layers of Mount Sharp- including the ancient time period when the Red Planet was far wetter and warmer than today, and thus more hospitable to the origin of life.

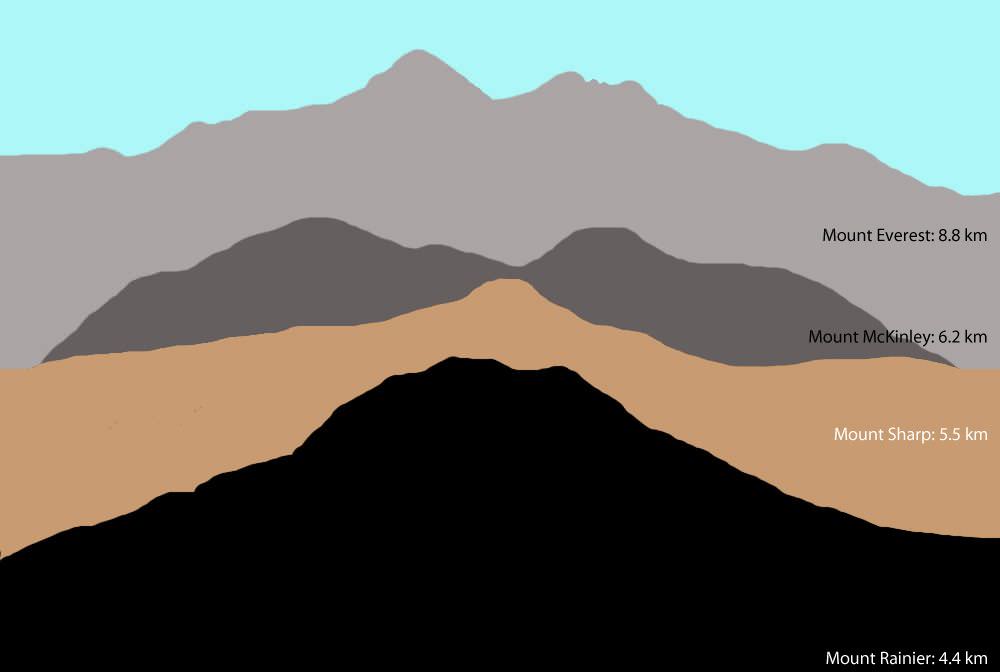
The huge mountain rises about 3.4 miles (5.5 km) from the center of Gale Crater. Its taller than Mount Ranier in Washington State.
The overland journey could take nearly a year or even longer into 2014 to arrive at the base of Mount Sharp, depending on what the 1 ton behemoth sees along the way.
And the scientists are eager to make as many discoveries as possible.
“The mission is discovery driven,” says John Grotznger of the California Institute of Technology in Pasadena, Calif., who leads NASA’s Curiosity Mars Science Laboratory mission. “We will go to where the science takes us.”
NASA chose Gale Crater as the landing site specifically to dispatch Curiosity to investigate the sedimentary layers of Mount Sharp because in surveys from Mars orbit it exhibited signatures of clay minerals that form in neutral water and that could possibly support the origin and evolution of simple Martian life forms, past or present.
“We have a real desire to get to Mount Sharp because there we see variations in the mineralogy as we go up from the base to higher levels and a change in the record of the environment,” explained Joy Crisp of JPL, Curiosity’s deputy project scientist.
“If we pass something amazing and compelling we might turn around and drive back,” Crisp added.
“The challenge for the science team will be to identify the most important targets along the way, and to study them without delaying drive progress too much,” notes Herkenoff.
Mount Sharp lies about 5 miles (8 kilometers) distant – as the Martian crow flies.
And Curiosity must also pass through a potentially treacherous dune field to get there.
“We are looking for the best path though,” said Curiosity Project Manager Jim Erickson of NASA’s Jet Propulsion Laboratory, Pasadena, Calif. at a recent media briefing.
11 months ago on Aug. 6 , 2012, Curiosity made an unprecedented pinpoint touchdown inside Gale Crater using the never before used Sky crane descent thrusters.
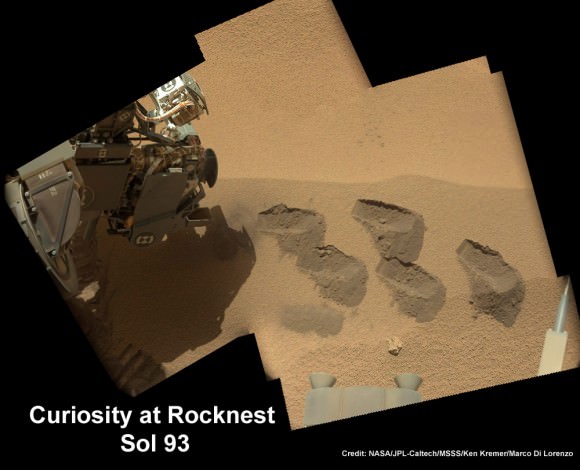
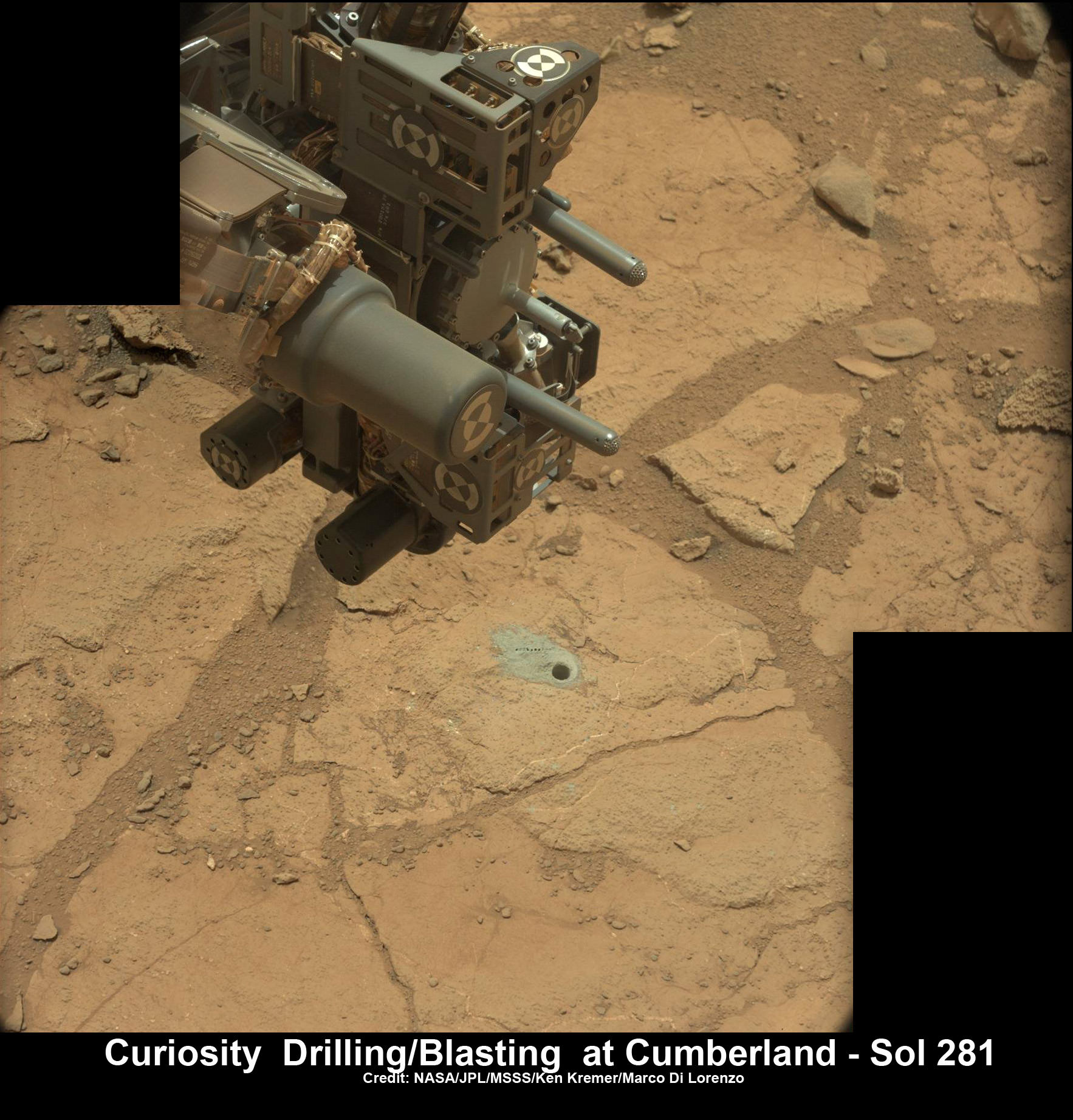
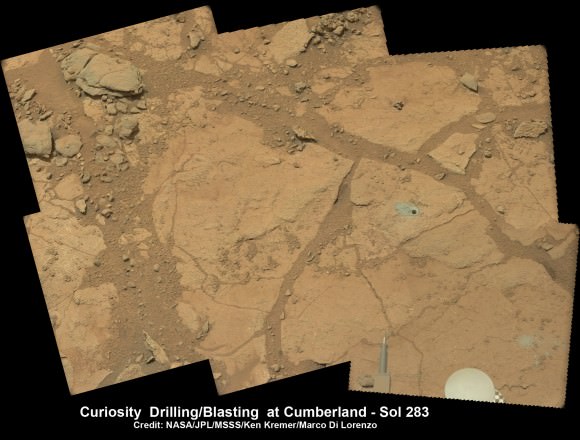
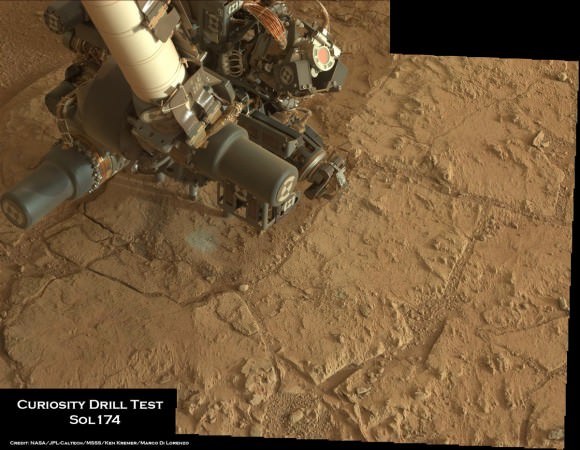
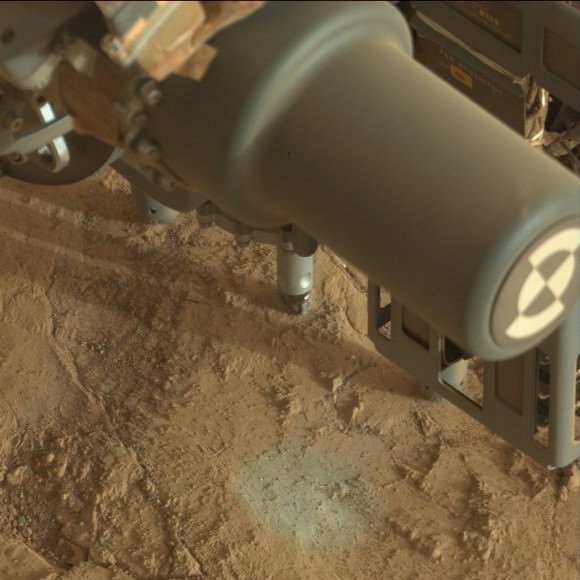
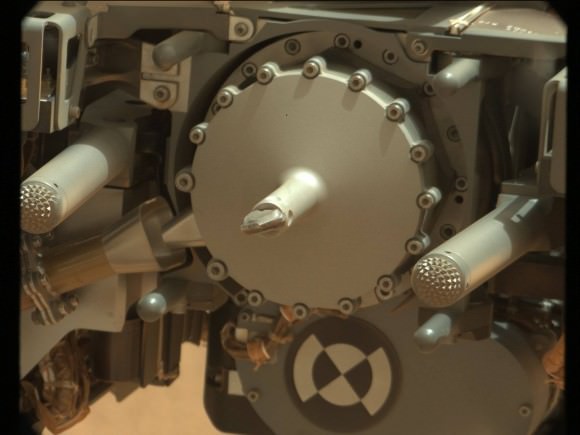
Long before even arriving at destination Mount Sharp, Curiosity has already successfully accomplished the key science objective of the mission when she discovered that liquid water flowed at this spot on Mars, it possesses the key chemical ingredients required for life and was habitable in the past.
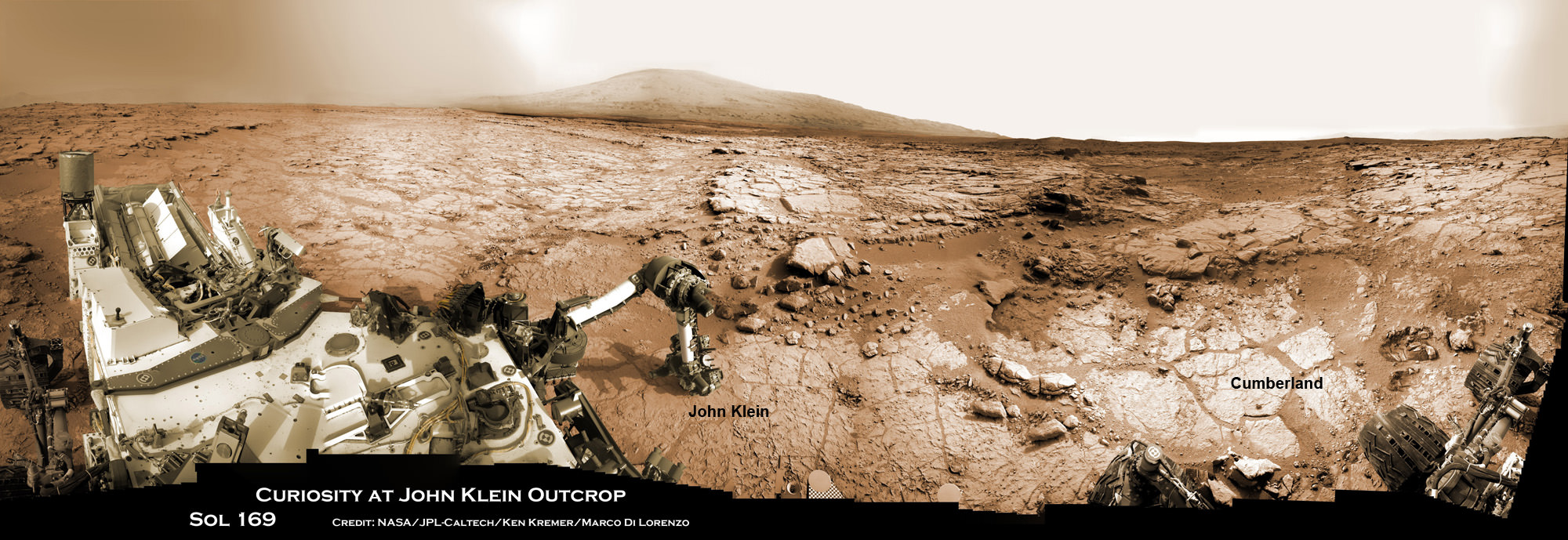
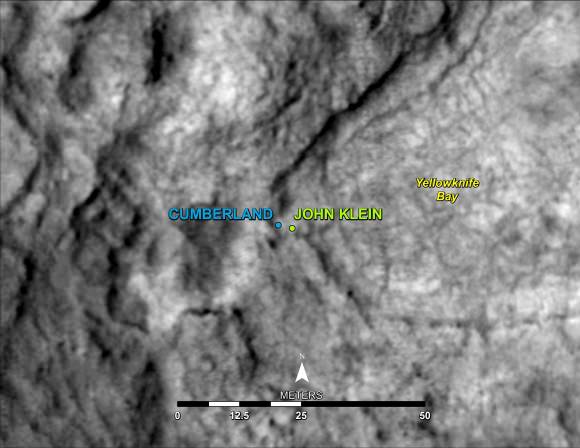
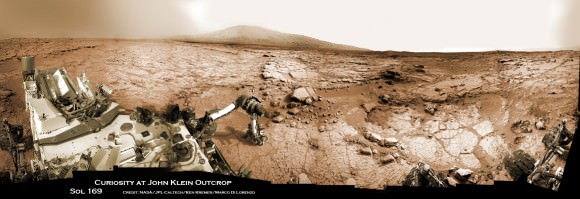
Drill samples from the ‘John Klein’ outcrop at Yellowknife Bay analyzed by Curiosity’s pair of onboard chemistry labs – SAM & Chemin – revealed that this location contains clay minerals required to support microbial life forms.
“We have found a habitable environment [at John Klein] which is so benign and supportive of life that probably if this water was around, and you had been on the planet, you would have been able to drink it,” said Grotzinger.


















{kind=link}