This is the first glimpse of JUICE's eventual destination captured by the spacecraft's NavCam during ground testing. Image Credit: Airbus Defense and Space.
Is there a more complicated and sophisticated technological engineering project than a spacecraft? Maybe a particle accelerator or a fusion power project. But other than those two, the answer is probably no.
Spacecraft like the ESA’s JUICE don’t just pop out of the lab ready to go. Each spacecraft like JUICE is a singular design, and they require years—or even a decade or more—of work before they ever see a launch pad. With a scheduled launch date of 2022, JUICE is in the middle of all that work. Now its cameras are capturing images of Jupiter and its icy moons as part of its navigation calibration and fine-tuning.
“It felt particularly meaningful to conduct our tests already on our destination!”
Gregory Jonniaux, Vision-Based Navigation expert at Airbus Defence and Space.
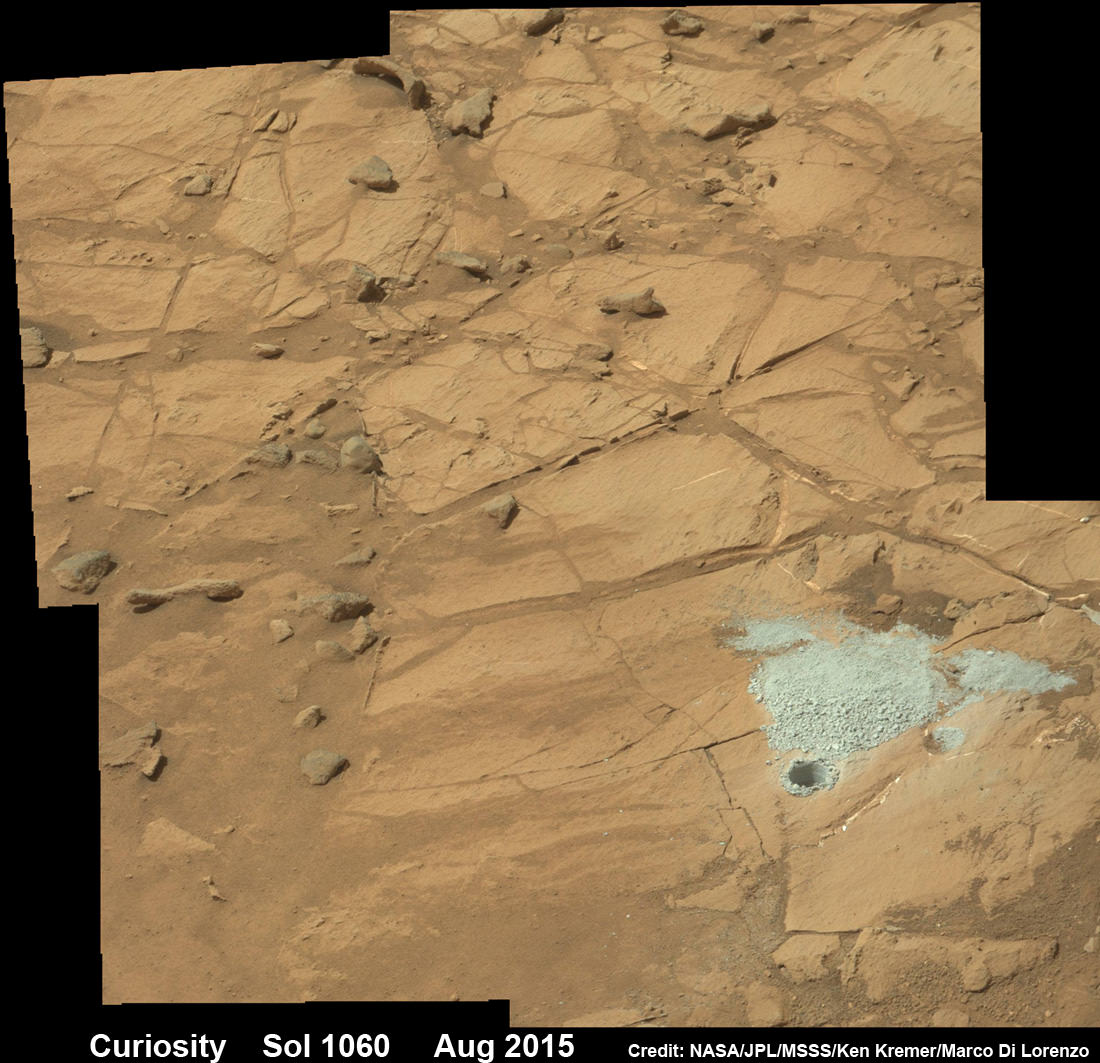
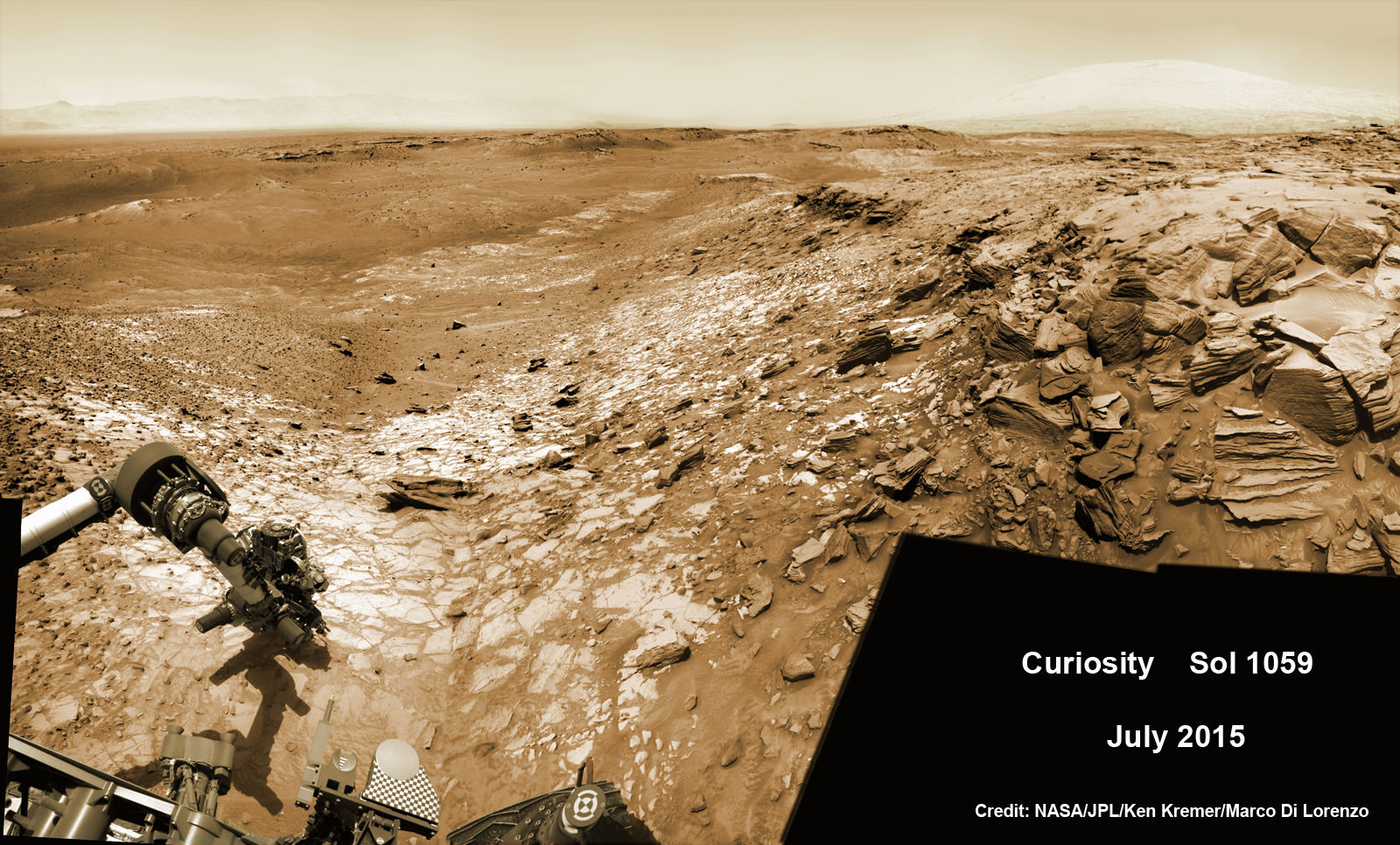
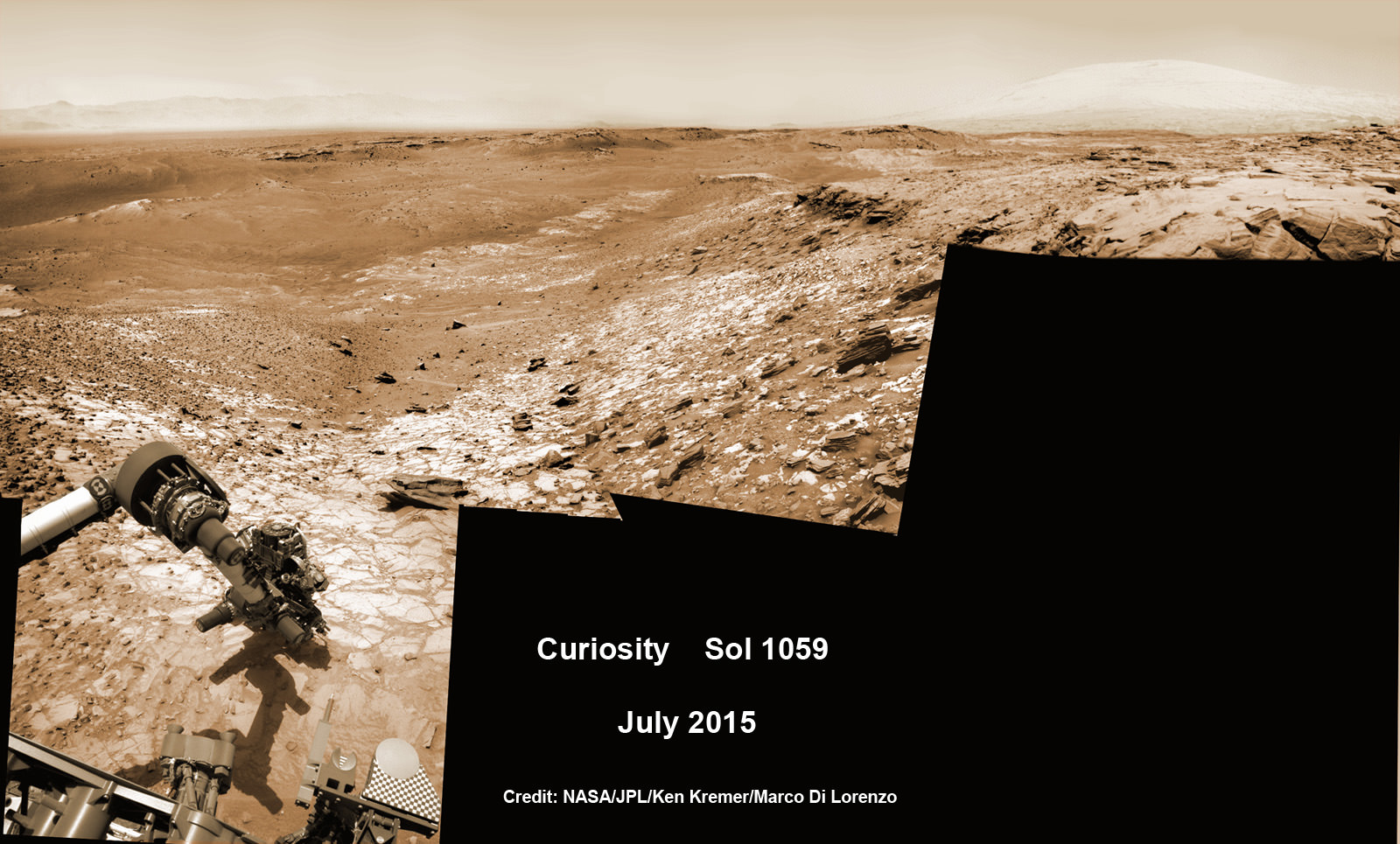
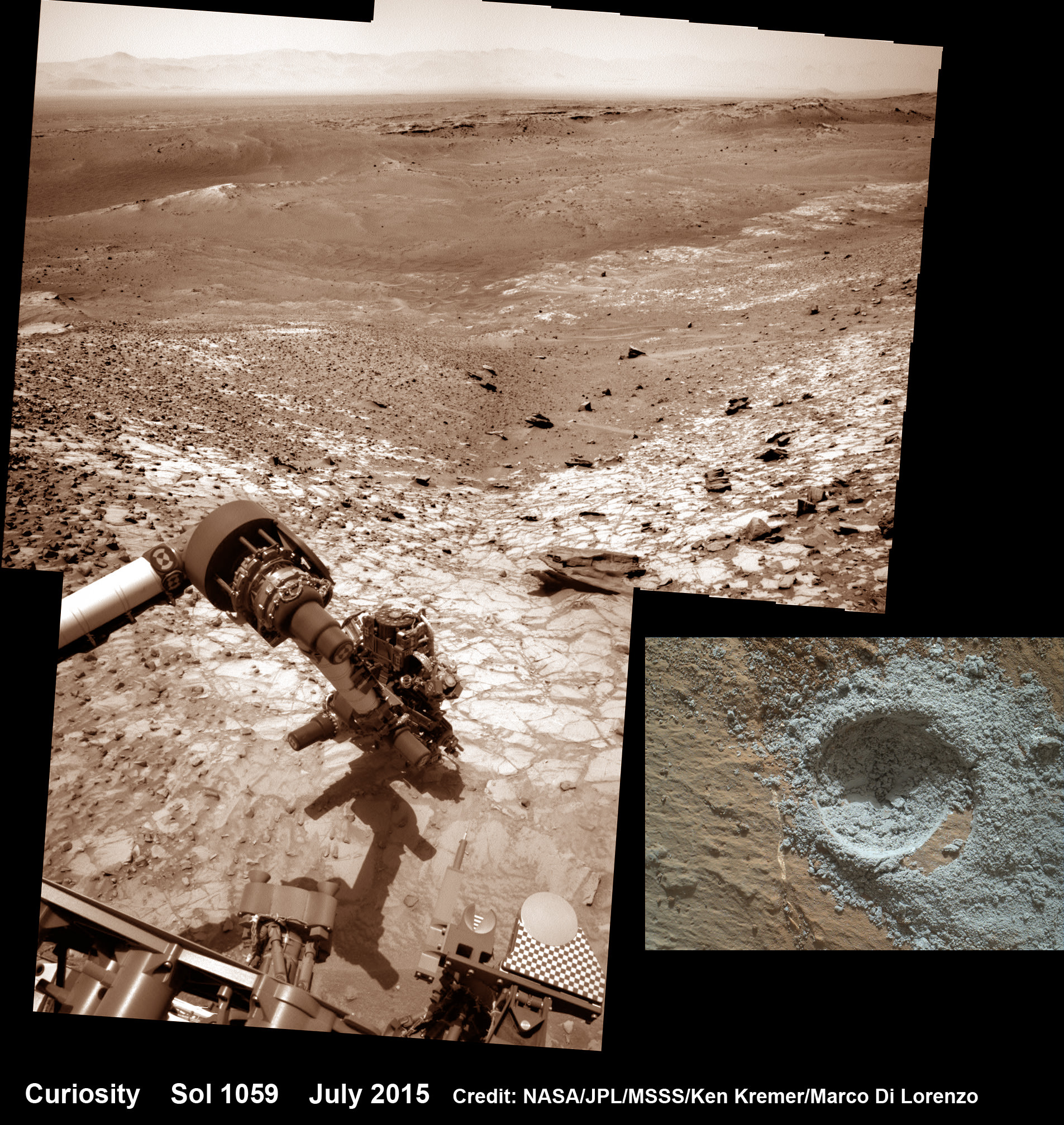
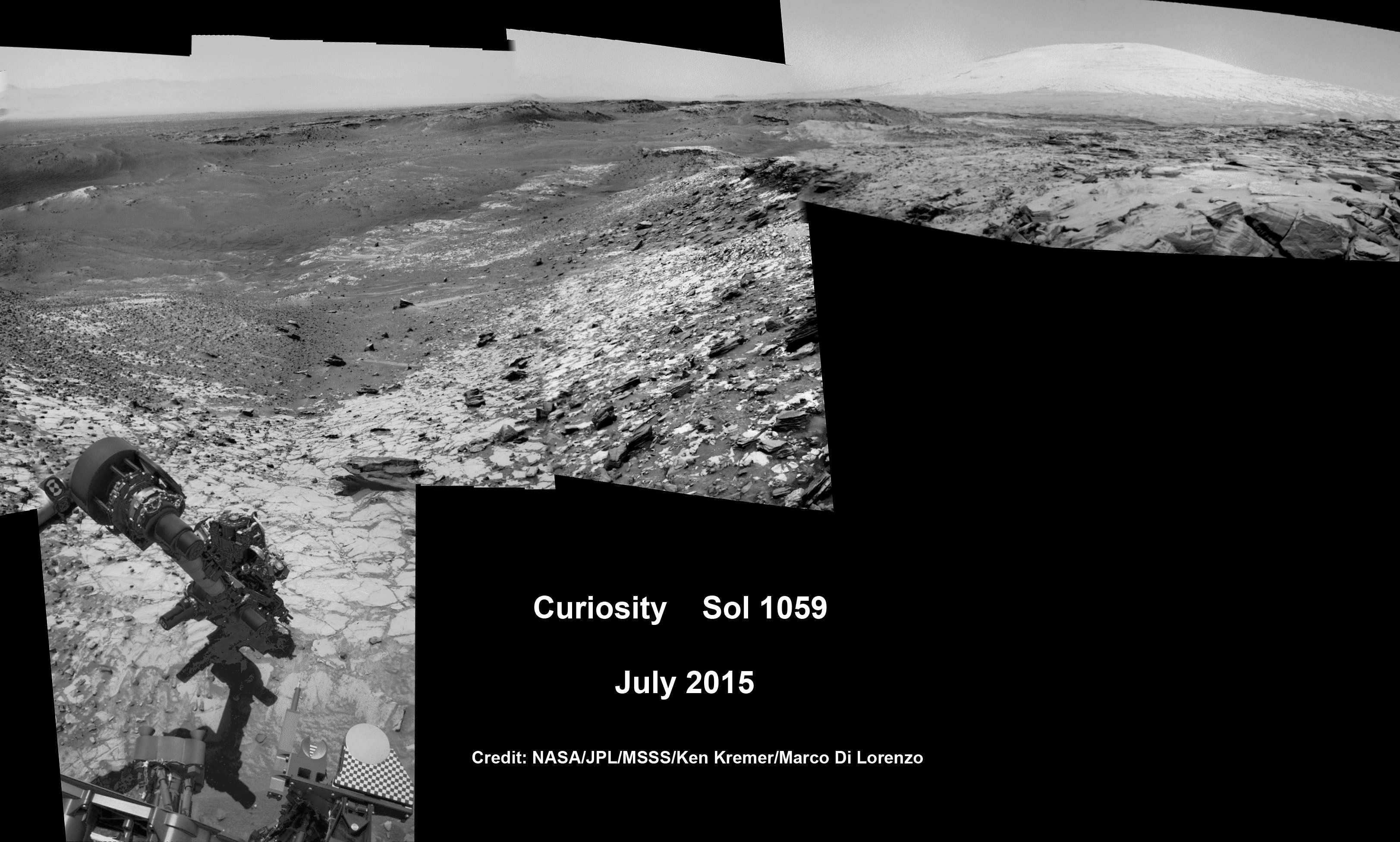
Curiosity extends robotic arm and conducts sample drilling at “Buckskin” rock target at bright toned “Lion” outcrop at the base of Mount Sharp on Mars, seen at right. Gale Crater eroded rim seen in the distant background at left, in this composite multisol mosaic of navcam raw images taken to Sol 1059, July 30, 2015. Navcam camera raw images stitched and colorized. Inset: MAHLI color camera up close image of full depth drill hole at “Buckskin” rock target on Sol 1060. Credit: NASA/JPL-Caltech/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Curiosity extends robotic arm and conducts sample drilling at “Buckskin” rock target at bright toned “Lion” outcrop at the base of Mount Sharp on Mars, seen at right, during August 2015. Gale Crater eroded rim seen in the distant background at left, in this composite multisol mosaic of navcam raw images taken to Sol 1059, July 30, 2015. Navcam camera raw images stitched and colorized. Inset: MAHLI color camera up close image of full depth drill hole at “Buckskin” rock target on Sol 1060. Credit: NASA/JPL-Caltech/MSSS/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Story updated[/caption]
NASA’s Curiosity Mars Science Laboratory (MSL) rover has successfully drilled into the first high silica rock target on Mars after recently discovering this new type of rock that’s unlike any found before – as she is about to mark the 3rd anniversary since the hair-raising touchdown on the Red Planet.
The SUV-sized rover bored a full depth hole into a Mars outcrop at a target dubbed “Buckskin” as commanded by the mission team over the weekend, after first conducting a mini drill test to assess the safety of the intended drill campaign to sample the alien rock interior beneath the Martian crater floor.
“This morning, the MSL operations team was very happy to see that drilling into Buckskin was successful!” said Ken Herkenhoff, Research Geologist at the USGS Astrogeology Science Center and an MSL science team member, in a mission update.
Confirmation of the success of the full depth drilling into “Buckskin” on Sol 1060 at the bright toned “Lion” outcrop came later after receipt of new high resolution images from the rover showing the approximately 1.6 cm (0.63 inch) diameter bore hole next to the initial mini hole test, along with the indicative residue of grey colored tailings from the Martian subsurface seen distributed around the new hole.
“Successful drilling at Buckskin!” added team member Professor John Bridges of the University of Leicester, England, in an update.
“Like the other drill holes this is showing how thin red Mars is,” Bridges elaborated.
Beneath a thin veneer of rusty red colored iron oxide, the Red Planet is remarkably grey as demonstrated by Curiosity’s prior drilling campaigns.
The hole was bored to a full depth of about 2.6 inches (6.5 centimeters) using the percussion drill on the terminus of the 7 foot-long (2.1 meter-long) robotic arm.
Curiosity rover successfully drills into Martian outcrop at Buckskin rock target at current work site at base of Mount Sharp in August 2015, in this mosaic showing full depth drill hole and initial test hole, with grey colored subsurface tailings and mineral veins on surrounding Red Planet terrain. This high resolution photo mosaic is a multisol composite of color images taken by the mast mounted Mastcam-100 color camera up to Sol 1060, July 31, 2015. Credit: NASA/JPL-Caltech/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Buckskin was “chosen because this sedimentary horizon has some very high silica enrichments,” Bridges explains.
The findings of elevated levels of silicon as well as hydrogen were derived from data collected by Curiosity’s laser-firing Chemistry & Camera (ChemCam) and Dynamic Albedo of Neutrons (DAN) instruments on certain local area rocks.
Silica is a rock-forming compound containing silicon and oxygen, commonly found on Earth as quartz.
“High levels of silica could indicate ideal conditions for preserving ancient organic material, if present, so the science team wants to take a closer look,” say mission team officials.
See the rover at work reaching out with her robotic arm and drilling into Buckskin, as illustrated in our new mosaics of mastcam and navcam camera raw images created by the image processing team of Ken Kremer and Marco Di Lorenzo (above and below).
“Buckskin” sits at the base of Mount Sharp, a huge layered mountain that dominates the center of the 96 mile-wide (154 kilometers-wide) Gale Crater landing site.
Exploring the sedimentary layers of Mount Sharp, which towers 3.4 miles (5.5 kilometers) into the Martian sky, is the primary destination and goal of the rovers long term scientific expedition on the Red Planet.
The silica enrichment “may have occurred as the Gale sediments were altered by subsurface fluids after burial. As the basaltic composition was altered (as we saw from the clay and Fe oxide at Yellowknife Bay) ultimately a lot of silica is released which can be precipitated at horizons like this,” explains Bridges.
The Curiosity Mars Science Laboratory (MSL) rover safely touched down on the crater floor on August 5, 2012 following the unprecedented and nail-biting sky crane maneuver that delivered her with pinpoint precision to a landing site nearby Mount Sharp inside Gale Crater.
The goal of the drilling is to provide geologic context for Curiosity’s long term climb up the mountains sedimentary layers by collecting samples to assess the habitability of the Red Planet over billions of years of time.
So the plan was for the robot to process and pulverize the samples for eventual delivery to the onboard pair of miniaturized chemistry labs located inside her belly – SAM and CheMin. Tiny samples are fed to a trio of inlet ports on the rover deck through the sieved filters.
Images are taken to document and assess the entire sample collection and delivery process.
After gathering the Buckskin sample, a portion was transferred to the robots scoop for inspection.
Then the first portion was successfully fed into CheMin for inorganic elemental analysis over the weekend.
“The activities planned for last weekend completed successfully, including sample dropoff to CheMin and analysis of the minerals present,” Herkenhoff confirmed.
The one ton robots next steps involve “dumping the portion of the drill sample that has not been sieved and Mastcam, ChemCam, MAHLI, and APXS observations of the dump pile. ChemCam and Mastcam will also observe nearby targets “Martz” and “Mountain Home.” MAHLI will image the drill hole, tailings and CheMin inlet at night using its LEDs for illumination.”
Curiosity MAHLI camera image taken of Buckskin drill hole on Sol 1060 on July 31, 2015. Credit: NASA/JPL/MSSS
After completing these science activities, the six wheeled rover will move on to the next exciting destination.
“It’s been a great couple of weeks at the Lion outcrop, but it’s time to move on,” says Lauren Edgar, Research Geologist at the USGS Astrogeology Science Center and an MSL science team member, in the latest mission update from today, August 4, Sol 1065.
“After a successful investigation that included observations by almost every science instrument, we’re getting ready to drive away tomorrow. That means that today (and tomorrow before we drive) is the last call for science observations.”
For about the past two months, the six wheeled robot has been driving around and exploring a geological contact zone named “Marias Pass” – an area on lower Mount Sharp, by examining the rocks and outcrops with her suite of state-of-the-art science instruments.
“Marias Pass” is a geological context zone where two rock types overlap – pale mudstone meets darker sandstone.
The prior hole was drilled at Telegraph Peak on Feb. 24, 2015, on Sol 908.
Curiosity recently celebrated 1000 Sols of exploration on Mars on May 31, 2015 – detailed here with our Sol 1000 mosaic also featured at Astronomy Picture of the Day on June 13, 2015.
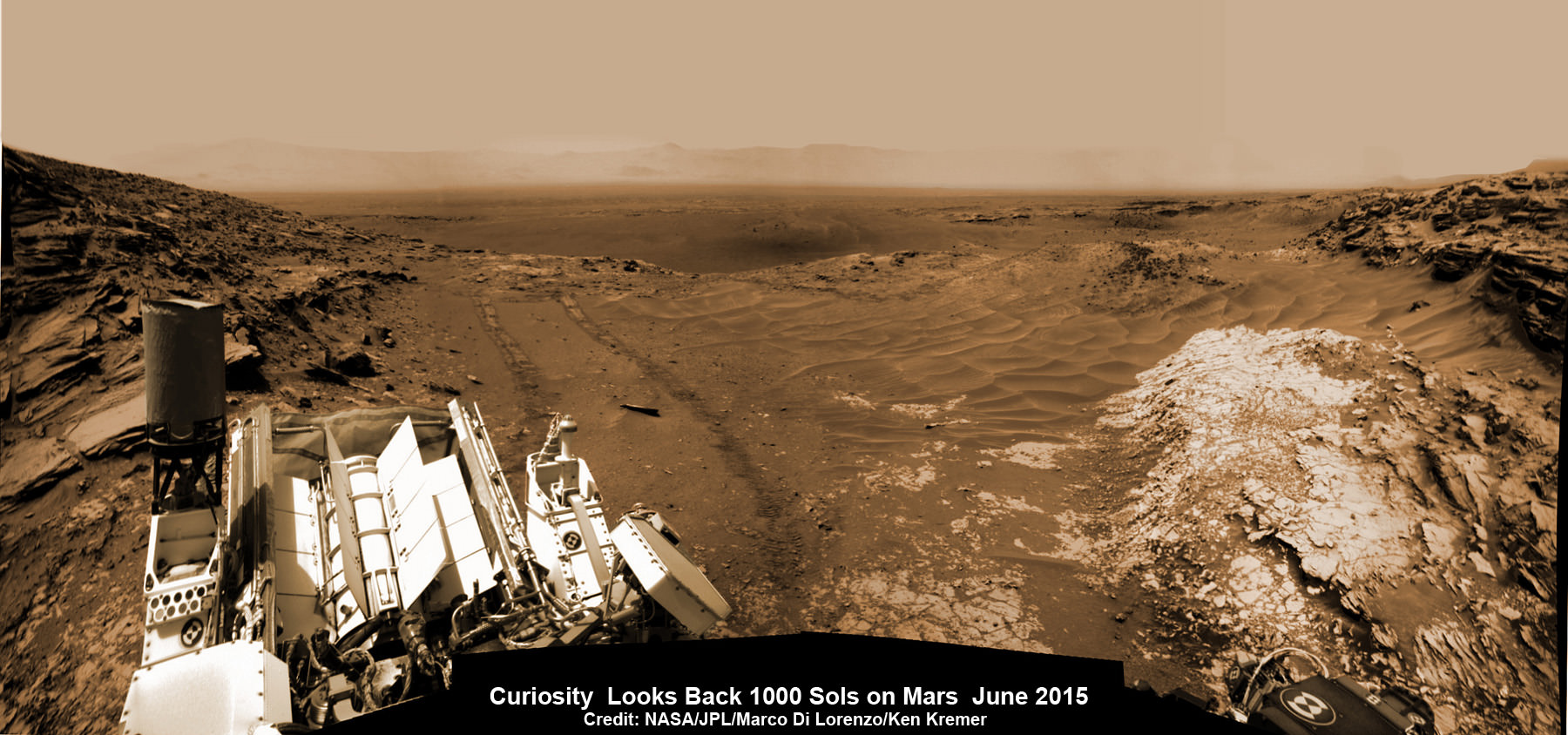
NASA’s Martian Curiosity rover looks backs to 1000 Sols of science and exploration on the surface of the Red Planet. Robot wheel tracks lead back through valley dunes. Gale Crater rim seen in the distant hazy background. Sol 997 (May 28, 2015) navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/ Marco Di Lorenzo/Ken Kremer/kenkremer.com Featured on APOD on June 13, 2015
As of today, Sol 1065, August 4, 2015, she has driven some 11 kilometers and taken over 256,000 amazing images.
Curiosity has already accomplished her primary objective of discovering a habitable zone on the Red Planet – at the Yellowknife Bay area – that contains the minerals necessary to support microbial life in the ancient past when Mars was far wetter and warmer billions of years ago.
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
Curiosity extends robotic arm and conducts test drill at “Buckskin” rock target at bright toned “Lion” outcrop on the lower region of Mount Sharp on Mars, seen at right. Gale Crater eroded rim seen in the distant background at left, in this composite multisol mosaic of navcam raw images taken to Sol 1059, July 30, 2015. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer/kenkremer.com/Marco Di Lorenzo
Curiosity extends robotic arm and conducts test drill at “Buckskin” rock target at bright toned “Lion” outcrop on the lower region of Mount Sharp on Mars, seen at right. Gale Crater eroded rim seen in the distant background at left, in this composite multisol mosaic of navcam raw images taken to Sol 1059, July 30, 2015. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer/kenkremer.com/Marco Di Lorenzo
On the eve of the 3rd anniversary since her nail biting touchdown inside Gale Crater, NASA’s car sized Curiosity Mars Science Laboratory (MSL) rover has discovered a new type of Martian rock that’s surprisingly rich in silica – and unlike any other targets found before.
Excited by this new science finding on Mars, Curiosity’s handlers are now gearing the robot up for her next full drill campaign today, July 31 (Sol 1060) into a rock target called “Buckskin” – which lies at the base of Mount Sharp, the huge layered mountain that is the primary science target of this Mars rover mission.
“The team selected the “Buckskin” target to drill,” says Lauren Edgar, Research Geologist at the USGS Astrogeology Science Center and an MSL science team member, in a mission update.
See the rover at work reaching out with her robotic arm and drilling into Buckskin, as illustrated in our new mosaics of navcam camera images created by the image processing team of Ken Kremer and Marco Di Lorenzo (above and below). Also featured at Alive Universe Images – here.
NASA Curiosity rover inspects ‘Buckskin’ rock outcrop on Mars with APXS mineral spectrometer in this hazcam camera raw image taken on July 29, 2015 (Sol 1058), colorized and linearized. Credit: NASA/JPL-Caltech/Marco Di Lorenzo/Ken Kremer/kenkremer.com
For about the past two months, the six wheeled robot has been driving around and exploring a geological contact zone named “Marias Pass” – an area on lower Mount Sharp, by examining the rocks and outcrops with her suite of state-of-the-art science instruments.
The goal is to provide geologic context for her long term expedition up the mountains sedimentary layers to study the habitability of the Red Planet over eons of time.
Data from Curiosity’s “laser-firing Chemistry & Camera (ChemCam) and Dynamic Albedo of Neutrons (DAN), show elevated amounts of silicon and hydrogen, respectively,” in certain local area rocks, according to the team.
Silica is a rock-forming compound containing silicon and oxygen, commonly found on Earth as quartz.
“High levels of silica could indicate ideal conditions for preserving ancient organic material, if present, so the science team wants to take a closer look.”
Curiosity extends robotic arm and conducts test drill at “Buckskin” rock target at bright toned “Lion” outcrop on the lower region of Mount Sharp on Mars. Gale crater rim seen in the distant background, in this composite mosaic of navcam raw images taken to Sol 1059, July 30, 2015. Inset: MAHLI camera up close image of test drill at “Buckskin” rock target. Navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/Ken Kremer/kenkremer.com/Marco Di Lorenzo Credit: NASA/JPL-Caltech/MSSS
Therefore the team scouted targets suitable for in depth analysis and sample drilling and chose “Buckskin”.
“Buckskin” is located among some high-silica and hydrogen enriched targets at a bright outcrop named “Lion.”
An initial test bore operation was conducted first to confirm whether that it was indeed safe to drill into “Buckskin” and cause no harm to the rover before committing to the entire operation.
The bore hole is about 1.6 cm (0.63 inch) in diameter.
“This test will drill a small hole in the rock to help determine whether it is safe to go ahead with the full hole,” elaborated Ryan Anderson, planetary scientist at the USGS Astrogeology Science Center and an MSL science team member.
So it was only after the team received back new high resolution imagery last night from the arm-mounted MAHLI camera which confirmed the success of the mini-drill operation, that the “GO” was given for a full depth drill campaign. MAHLI is short for Mars Hand Lens Imager.
“We successfully completed a mini drilling test yesterday (shown in the MAHLI image). That means that today we’re going for the FULL drill hole” Edgar confirmed.
“GO for Drilling.”
So it’s a busy day ahead on the Red Planet, including lots of imaging along the way to document and confirm that the drilling operation proceeds safely and as planned.
“First we’ll acquire MAHLI images of the intended drill site, then we’ll drill, and then we’ll acquire more MAHLI images after drilling,” Edgar explains.
“The plan also includes Navcam imaging of the workspace, and Mastcam imaging of the target and drill bit. In addition to drilling, we’re getting CheMin ready to receive sample in an upcoming plan. Fingers crossed!” Surface observations with the arm-mounted Alpha Particle X-ray Spectrometer (APXS) instrument are also planned.
If all goes well, the robot will process and pulverize the samples for eventual delivery to the onboard pair of miniaturized chemistry labs located inside her belly – SAM and CheMin. Tiny samples will be fed to the inlet ports on the rover deck through the sieved filters.
A rock outcrop dubbed “Missoula,” near Marias Pass on Mars, is seen in this image mosaic taken by the Mars Hand Lens Imager on NASA’s Curiosity rover. Pale mudstone (bottom of outcrop) meets coarser sandstone (top) in this geological contact zone, which has piqued the interest of Mars scientists. Credit: NASA/JPL-Caltech/MSSS
Meanwhile the team is studying a nearby rock outcrop called “Ch-paa-qn” which means “shining peak” in the native Salish language of northern Montana.”
Anderson says the target is a bright patch on a nearby outcrop. Via active and passive observations with the mast-mounted ChemCam laser and Mastcam multispectral imager, the purpose is to determine if “Ch-paa-qn” is comprised of calcium sulfate like other white veins visible nearby, or perhaps it’s something else entirely.
A rock fragment dubbed “Lamoose” is shown in this picture taken by the Mars Hand Lens Imager (MAHLI) on NASA’s Curiosity rover. Like other nearby rocks in a portion of the “Marias Pass” area of Mt. Sharp, Mars, it has unusually high concentrations of silica. The high silica was first detected in the area by the Chemistry & Camera (ChemCam) laser spectrometer. This rock was targeted for follow-up study by the MAHLI and the arm-mounted Alpha Particle X-ray Spectrometer (APXS). Credits: NASA/JPL-Caltech/MSSS
Before arriving by the “Lion” outcrop last week, Curiosity was investigating another outcrop area nearby, the high-silica target dubbed “Elk” with the ChemCam instrument, while scouting around the “Marias Pass” area in search of tasty science targets for in-depth analysis.
Sometimes the data subsequently returned and analyzed is so extraordinary, that the team decides on a return trip to a spot previously departed. Such was the case with “Elk” and the rover was commanded to do a U-turn to acquire more precious data.
“One never knows what to expect on Mars, but the Elk target was interesting enough to go back and investigate,” said Roger Wiens, the principal investigator of the ChemCam instrument from the Los Alamos National Laboratory in New Mexico.
Soon, ChemCam will have fired on its 1,000th target. Overall the laser blaster has been fired more than 260,000 times since Curiosity landed inside the nearly 100 mile wide Gale Crater on Mars on Aug. 6, 2012, alongside Mount Sharp.
“ChemCam acts like eyes and ears of the rover for nearby objects,” said Wiens.
“Marias Pass” is a geological context zone where two rock types overlap – pale mudstone meets darker sandstone.
The rover spotted a very curious outcrop named “Missoula.”
“We found an outcrop named Missoula where the two rock types came together, but it was quite small and close to the ground. We used the robotic arm to capture a dog’s-eye view with the MAHLI camera, getting our nose right in there,” said Ashwin Vasavada, the mission’s project scientist at NASA’s Jet Propulsion Laboratory in Pasadena, California.
White mineral veins, possibly comprised of calcium sulfate, filled the fractures by depositing the mineral from running groundwater.
“Such clues help scientists understand the possible timing of geological events,” says the team.
Read more about Curiosity in an Italian language version of this story at Alive Universe Images – here.
NASA’s Martian Curiosity rover looks backs to 1000 Sols of science and exploration on the surface of the Red Planet. Robot wheel tracks lead back through valley dunes. Gale Crater rim seen in the distant hazy background. Sol 997 (May 28, 2015) navcam camera raw images stitched and colorized. Credit: NASA/JPL-Caltech/ Marco Di Lorenzo/Ken Kremer/kenkremer.com Featured on APOD on June 13, 2015
As of today, Sol 1060, July 31, 2015, she has taken over 255,000 amazing images.
Red Mars, Gray Mars: “Mini-start hole” drill maneuver was successful. Image of mini start drill hole taken by Mars Hand Lens Imager (MAHLI) aboard NASA’s Mars rover Curiosity on July 30, 2015, Sol 1059. Credit: NASA/JPL-Caltech/MSSS
Curiosity extends robotic arm and conducts test drill at “Buckskin” rock target at bright toned “Lion” outcrop on the lower region of Mount Sharp on Mars, seen at right. Gale crater rim seen in the distant background at left, in this composite mosaic of navcam raw images taken to Sol 1059, July 30, 2015. Navcam camera raw images stitched. Credit: NASA/JPL-Caltech/Ken Kremer/kenkremer.com/Marco Di Lorenzo
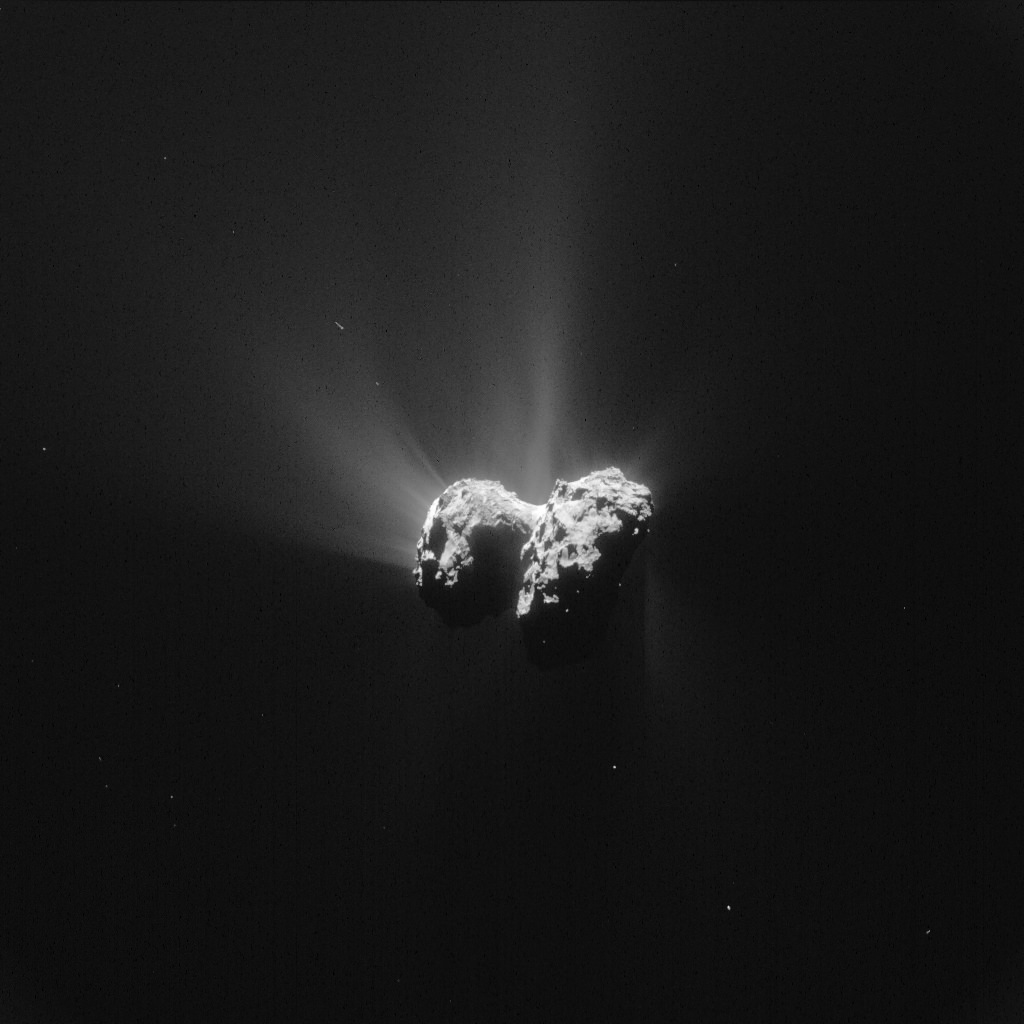
This single frame Rosetta navigation camera image of Comet 67P/Churyumov-Gerasimenko was taken on 15 June 2015 from a distance of 207 km from the comet centre. The image has a resolution of 17.7 m/pixel and measures 18.1 km across. Credit: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
Rosetta will attempt comet landing
This single frame Rosetta navigation camera image of Comet 67P/Churyumov-Gerasimenko was taken on 15 June 2015 from a distance of 207 km from the comet centre. The image has a resolution of 17.7 m/pixel and measures 18.1 km across. Credit: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0 [/caption]
Europe’s history making Rosetta cometary spacecraft has been granted a nine month mission extension to plus up its bountiful science discoveries as well as been given the chance to accomplish one final and daring historic challenge, as engineers attempt to boldly go and land the probe on the undulating surface of the comet its currently orbiting.
Officials with the European Space Agency (ESA) gave the “GO” on June 23 saying “The adventure continues” for Rosetta to march forward with mission operations until the end of September 2016.
If all continues to go well “the spacecraft will most likely be landed on the surface of Comet 67P/Churyumov-Gerasimenko” said ESA to the unabashed glee of the scientists and engineers responsible for leading Rosetta and reaping the rewards of nearly a year of groundbreaking research since the probe arrived at comet 67P in August 2014.
“This is fantastic news for science,” says Matt Taylor, ESA’s Rosetta Project Scientist, in a statement.
It will take about 3 months for Rosetta to spiral down to the surface.
After a decade long chase of over 6.4 billion kilometers (4 Billion miles), ESA’s Rosetta spacecraft arrived at the pockmarked Comet 67P/Churyumov-Gerasimenko on Aug. 6, 2014 for history’s first ever attempt to orbit a comet for long term study.
Since then, Rosetta deployed the piggybacked Philae landing craft to accomplish history’s first ever touchdown on a comets nucleus on November 12, 2014. It has also orbited the comet for over 10 months of up close observation, coming at times to as close as 8 kilometers. It is equipped with a suite 11 instruments to analyze every facet of the comet’s nature and environment.
ESA Philae lander approaches comet 67P/Churyumov–Gerasimenko on 12 November 2014 as imaged from Rosetta orbiter after deployment and during seven hour long approach for 1st ever touchdown on a comets surface. Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA – Composition by Marco Di Lorenzo/Ken Kremer
Currently, Comet 67P is still becoming more and more active as it orbits closer and closer to the sun over the next two months. The mission extension will enable researchers to a far greater period of time to compare the comets activity, physical and chemical properties and evolution ‘before and after’ they arrive at perihelion some six weeks from today.
The pair reach perihelion on August 13, 2015 at a distance of 186 million km from the Sun, between the orbits of Earth and Mars.
“We’ll be able to monitor the decline in the comet’s activity as we move away from the Sun again, and we’ll have the opportunity to fly closer to the comet to continue collecting more unique data. By comparing detailed ‘before and after’ data, we’ll have a much better understanding of how comets evolve during their lifetimes.”
Because the comet is nearly at its peak of outgassing and dust spewing activity, Rosetta must observe the comet from a stand off distance, while still remaining at a close proximity, to avoid damage to the probe and its instruments.
Furthermore, the Philae lander “awoke” earlier this month after entering a sven month hibernation period after successfully compleing some 60 hours of science observations from the surface.
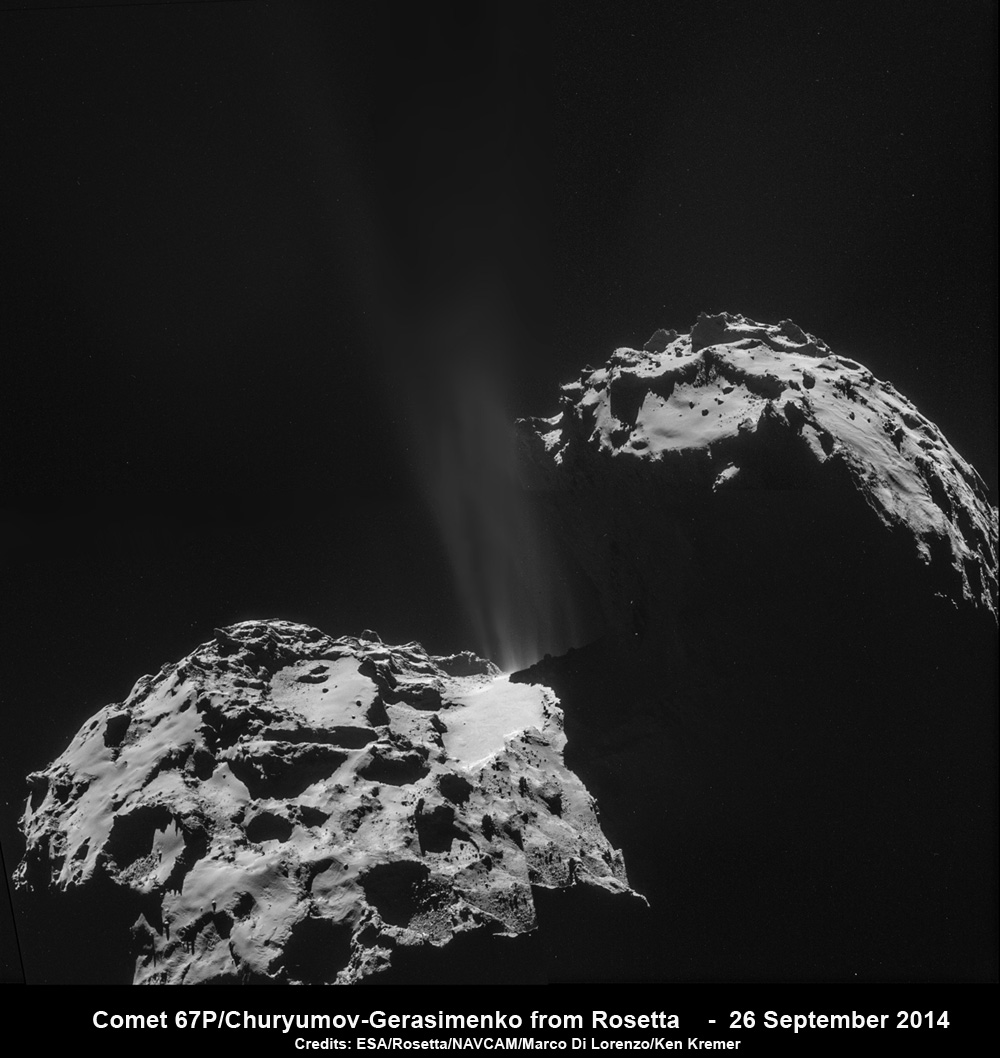
Jets of gas and dust are blasting from the active neck of comet 67P/Churyumov-Gerasimenko in this photo mosaic assembled from four images taken on 26 September 2014 by the European Space Agency’s Rosetta spacecraft at a distance of 26.3 kilometers (16 miles) from the center of the comet. Credit: ESA/Rosetta/NAVCAM/Marco Di Lorenzo/Ken Kremer/kenkremer.com
As the comet again edges away from the sun and becomes less active, the team will attempt to land Rosetta on comet 67P before it runs out of fuel and the energy produced from the huge solar panels is insufficient to continue mission operations.
“This time, as we’re riding along next to the comet, the most logical way to end the mission is to set Rosetta down on the surface,” says Patrick Martin, Rosetta Mission Manager.
“But there is still a lot to do to confirm that this end-of-mission scenario is possible. We’ll first have to see what the status of the spacecraft is after perihelion and how well it is performing close to the comet, and later we will have to try and determine where on the surface we can have a touchdown.”
During the extended mission, the team will use the experience gained in operating Rosetta in the challenging cometary environment to carry out some new and potentially slightly riskier investigations, including flights across the night-side of the comet to observe the plasma, dust, and gas interactions in this region, and to collect dust samples ejected close to the nucleus, says ESA.
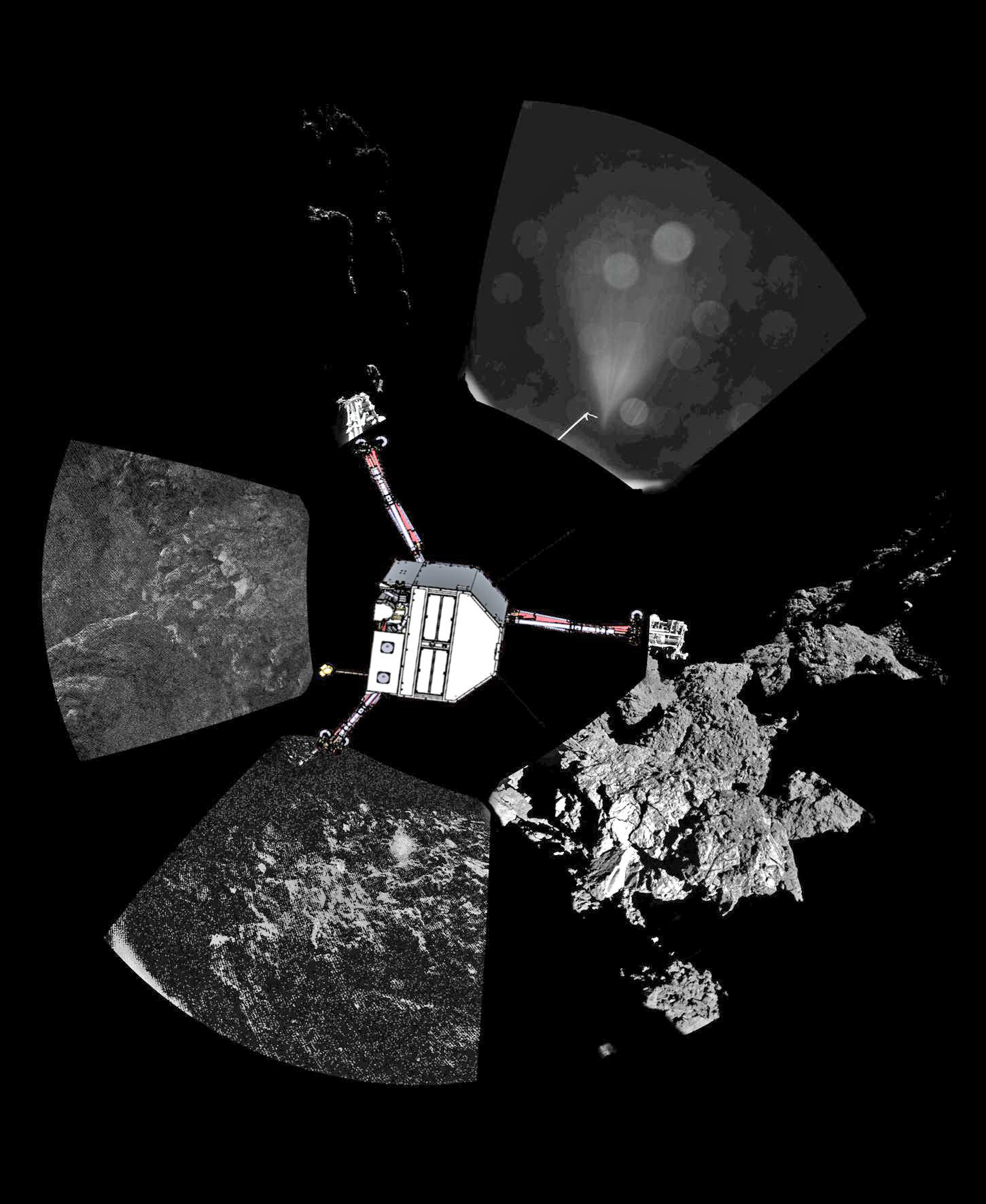
Rosetta’s lander Philae has returned the first panoramic image from the surface of a comet. The view as it has been captured by the CIVA-P imaging system, shows a 360º view around the point of final touchdown. The three feet of Philae’s landing gear can be seen in some of the frames. Superimposed on top of the image is a sketch of the Philae lander in the configuration the lander team currently believe it is in. The view has been processed to show further details. Credit: ESA/Rosetta/Philae/CIVA. Post processing: Ken Kremer/Marco Di Lorenzo
Stay tuned here for Ken’s continuing Earth and planetary science and human spaceflight news.
Learn more about Rosetta, SpaceX, Europa, Mars rovers, Orion, SLS, Antares, NASA missions and more at Ken’s upcoming outreach events:
Jun 25-28: “SpaceX launch, Orion, Commercial crew, Curiosity explores Mars, Antares and more,” Kennedy Space Center Quality Inn, Titusville, FL, evenings
This single frame Rosetta navigation camera image was taken from a distance of 77.8 km from the centre of Comet 67P/Churyumov-Gerasimenko on 22 March 2015. The image has a resolution of 6.6 m/pixel and measures 6 x 6 km. The image is cropped and processed to bring out the details of the comet’s activity. Credit: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0
The dinosaur on Mars, the Face in Cydonia, the rat, the human skull, the Smiley face, the prehistoric vertebrae and the conglomerate rock. Something is amiss in this montage and shouldn't be included. (Photo Credits: NASA/JPL)
What is up with the fossils on Mars? Found – a dinosaur skull on Mars? Discovered – a rat, squirrel or gerbil on Mars? In background of images from Curiosity, vertebrae from some extinct Martian species? And the human skull, half buried in photos from Opportunity Rover. All the images are made of stone from the ancient past and this is also what is called Pareidolia. They are figments of our imaginations, and driven by our interest to be there – on Mars – and to know that we are not alone. Altogether, they make a multitude of web pages and threads across the internet.
Rock-hounds and Martian paleontologists, if only amateur or retired, have found a bounty of fascinating rocks nestled among the rocks on Mars. There are impressive web sites dedicated to each’s eureka moment, dissemination among enthusiasts and presentation for discussion.
NASA scientists have sent the most advanced robotic vehicles to the surface of Mars, to the most fascinating and diverse areas that are presently reachable with our technology and landing skills. The results have been astounding scientifially but also in terms of mysteries and fascination with the strange, alien formations. Some clearly not unlike our own and others that must be fossil remnants from a bygone era – so it seems.
Be sure to explore, through the hyperlinks, many NASA, NASA affiliates’ and third party websites – embedded throughout this article. Also, links to specific websites are listed at the end of the article.
The Dinosaur skull on Mars is actually dated from Martian Sol 297 (June 7, 2013). The imager used to return this was the MASTCAM and an historic array of landscapes, close-ups and selfies has been produced by the Mars Hand Lens Imager (MAHLI). Other MSL Curiosity cameras are the NAVCAM, cameras for navigation, HAZCAM and MARDI camera. The array of images is historic and overwhelming raising more questions than answers including speculative and imaginative “discoveries.” (Photo Credit: NASA/JPL)
The centerpiece of recent interest is the dinosaur skull protruding from the Martian regolith, teeth still embedded, sparkling efferdent white. There are no sockets for these teeth. Dinosaur dentures gave this senior citizen a few extra good years. The jaw line of the skull has no joint or connection point with the skull. So our minds make up the deficits, fill in the blanks and we agree with others and convince ourselves that this is a fossilized skull. Who knows how this animal could have evolved differently.
But evolve it did – within our minds. Referencing online dictionaries [ref], “Pareidolia is the imagined perception of a pattern (or meaning) where it does not actually exist, as in considering the moon to have human features.” I must admit that I do not seek out these “discoveries” on Mars but I enjoy looking at them and there are many scientists at JPL that have the same bent. Mars never fails to deliver and caters to everyone, but when skulls and fossils are seen, it is actually us catering to the everyday images and wishes we hold in our minds.
No one is left out of the imagery returned from the array of NASA’s Martian assets in orbit. Mars exhibits an incredible display of wind swept sand dunes (center photo). (Photo Credits: NASA, Paramount Pictures)
The “Rat on Mars” (main figure, top center) is actually quite anatomically complete and hunkered down, having taken its final gasps of air, eons ago, as some cataclysmic event tore the final vestiges of Earth-like atmosphere off the surface. It died where it once roamed and foraged for … nuts and berries? Surprisingly, no nuts have been found. Blueberries – yes – they are plentiful on Mars and could have been an excellent nutritional source for rats; high in iron and possibly like their Earthly counterpart, high in anti-oxidants.
The Blueberries of Mars are actually concretions of iron rich minerals from water – ground or standing pools – created over thousands of years during periodic epochs of wet climates on Mars. (Photo Credits: NASA/JPL/Cornell)
The blueberries were popularized by Dr. Steve Squyres, the project scientist of the Mars Exploration Rover (MER) mission. Discovered in Eagle crater and across Meridiani Planum, “Blueberries” are spherules of concretions of iron rich minerals from water. It is a prime chapter in the follow-the-water story of Mars. And not far from the definition of Pareidolia, Eagle Crater refers to the incredible set of landing bounces that sent “Oppy” inside its capsule, surrounded by airbags on a hole-in-one landing into that little crater.
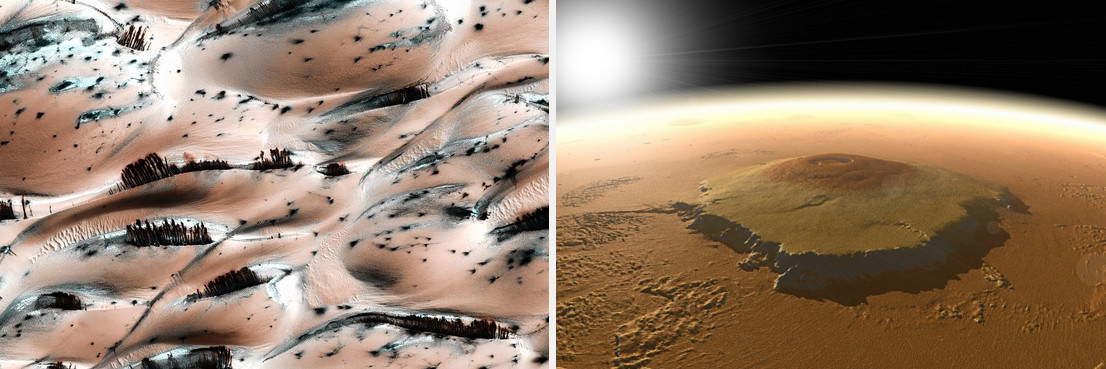
When the global dust storm cleared, Mariner 9’s first landfall was the tip of Olympus Mons, 90,000 feet above its base. Two decades later, Mars Global Surveyors laser altimeter data was used to computer generate this image(NASA Solar System Exploration page). At left are sand dunes near the north pole photographed in 2008 (APOD) by the Mars Reconnaissance Orbiter HiRISE camera. The sand dunes challenge scientists’ understanding of Mars’ geology and meterology while fueling speculation that such features are plants or trees on Mars. (Photo Credit: NASA/JPL)
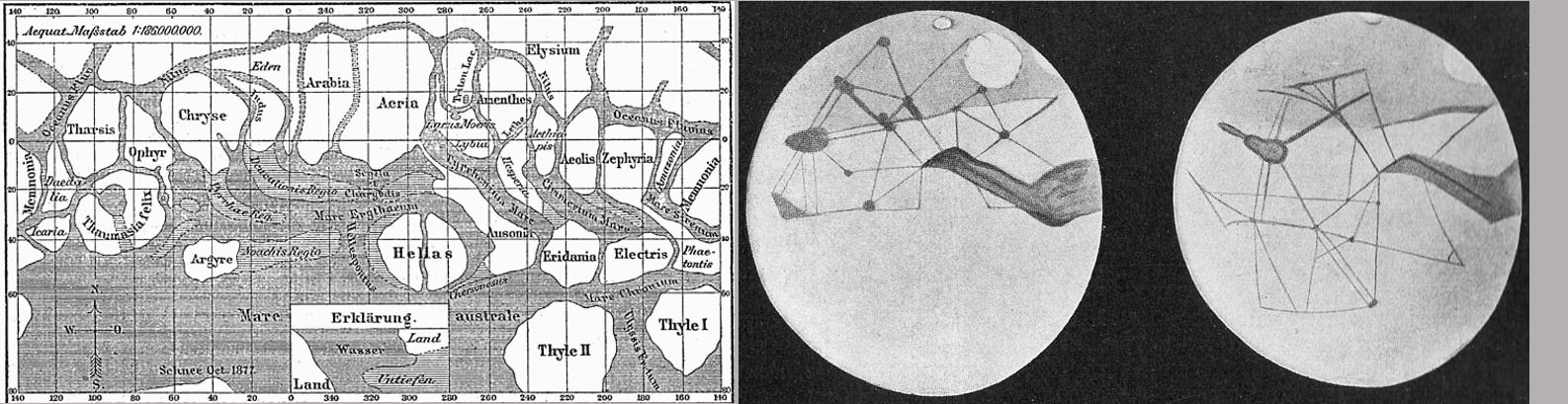
Next, is the face of Mars of the Cydonia region (Images of Cydonia, Mars, NSSDC). As seen in the morphed images, above, the lower resolution Viking orbiter images presented Mars-o-philes clear evidence of a lost civilization. Then, Washington handed NASA several years of scant funding for planetary science, and not until Mars Global Surveyor, was the Face of Cydonia photographed again. The Mars Orbiter Camera from the University of Arizona delivered high resolution images that dismissed the notion of a mountain-sized carving. Nonetheless, this region of Mars is truly fascinating geologically and does not disappoint those in search of past civilizations.
At left, drawings by Italian astronomer Giovanni Schiaparelli coinciding with Mars’ close opposition with Earth in 1877. At right, the drawings of Percival Lowell who built the fine observatory in Flagstaff to support his interest in Mars and the search for a ninth planet. H.G. Wells published his book “War of the Worlds” in 1897. (Image Credits: Wikipedia)
And long before the face on Mars in Cydonia, there were the canals of Mars. Spotted by the Mars observer Schiaparelli, the astronomer described them as “channels” in his native language of Italian. The translation of the word turned to “Canals” in English which led the World to imagine that an advanced civilization existed on Mars. Imagine if you can for a moment, this world without Internet or TV or radio and even seldom a newspaper to read. When news arrived, people took it verbatim. Canals, civilizations – imagine how imaginations could run with this and all that actually came from it. It turns out that the canals or channels of Mars as seen with the naked eye were optical illusions and a form of Pareidolia.
So, as our imagery from Mars continues to return in ever greater detail and depth, scenes of pareidolia will fall to reason and we are left with understanding. It might seem sterile and clinical but its not. We can continue to enjoy these fascinating rocks – dinosaurs, rats, skulls, human figures – just as we enjoy a good episode of Saturday Night Live. And neither the science or the pareidolia should rob us of our ability to see the shear beauty of Mars, the fourth rock from the Sun.
Having supported Mars Phoenix software development including the final reviews of the EDL command sequence, I was keen to watch images arrive from the lander. The image was on an office wall entertaining the appearance of a not-so-tasty junk food item on Mars. (Photo Credit: NASA/JPL/Univ. Arizona, Illustration – T.Reyes)
In the article’s main image, what should not be included is the conglomerate rock on Mars. NASA/JPL scientists and geologists quickly recognized this as another remnant of Martian hydrologics – the flow of water and specifically, the bottom of a stream bed (NASA Rover Finds Old Streambed on Martian Surface). Truly a remarkable discovery and so similar to conglomerate rocks on Earth.
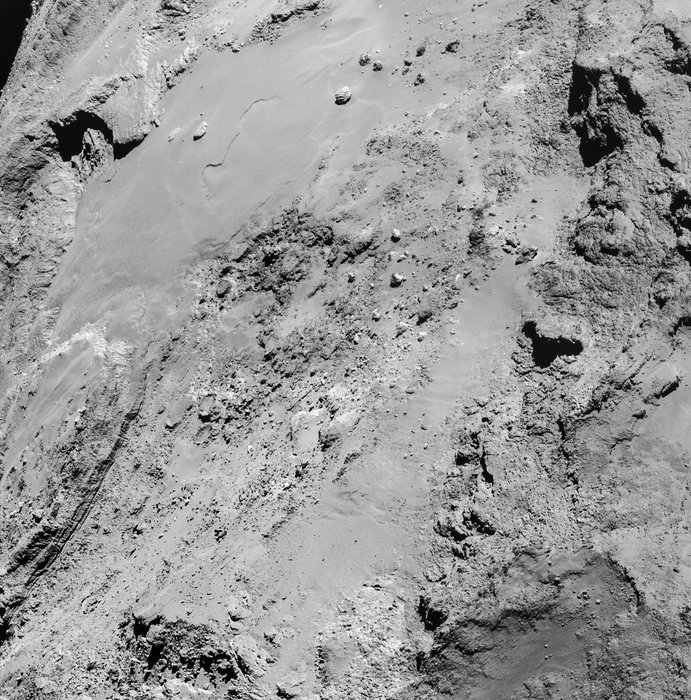
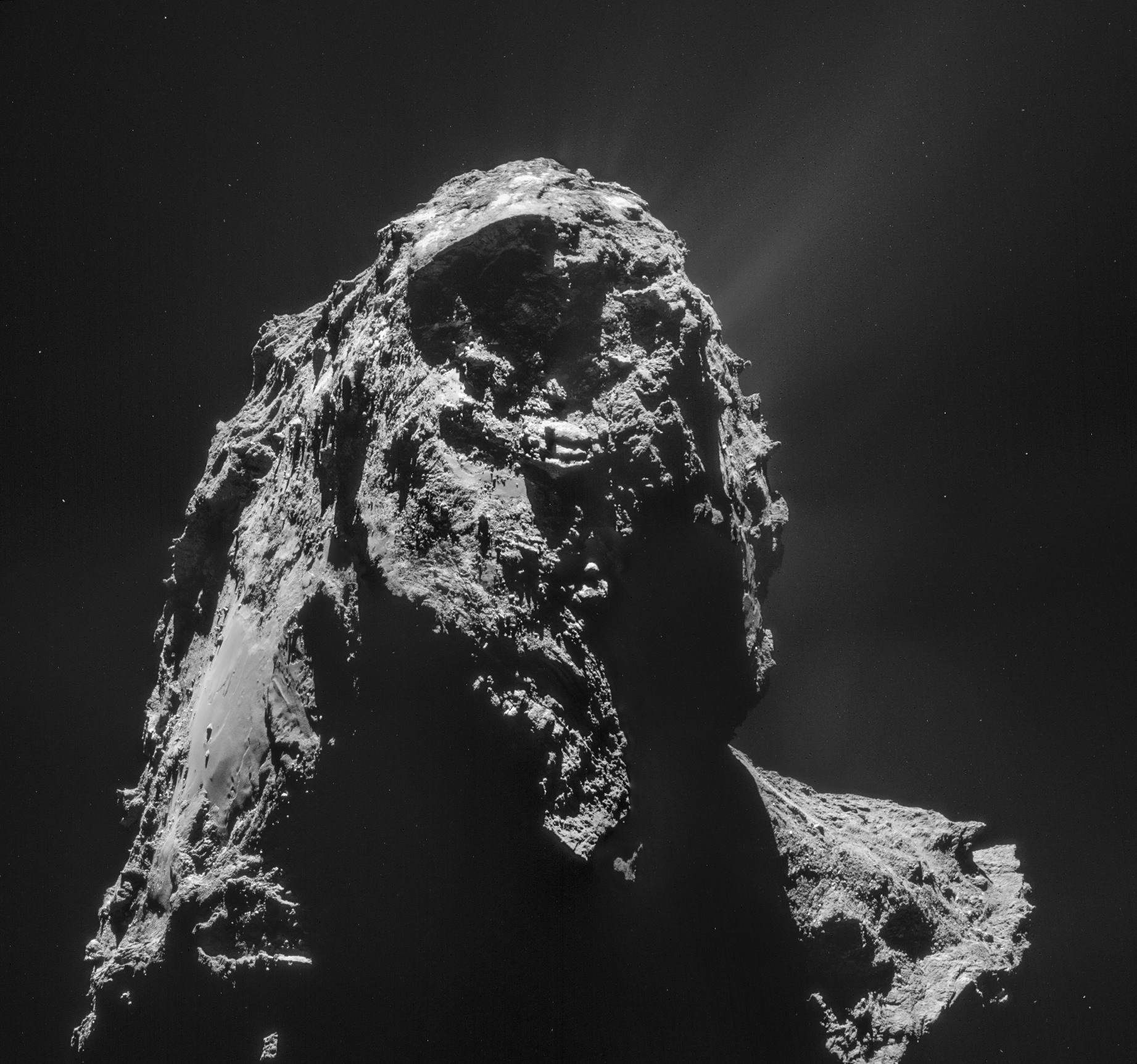
The surface of 67P/C-G imaged by Rosetta on Feb. 14, 2015 from about 8.9 km (ESA/Rosetta/NavCam – CC BY-SA IGO 3.0)
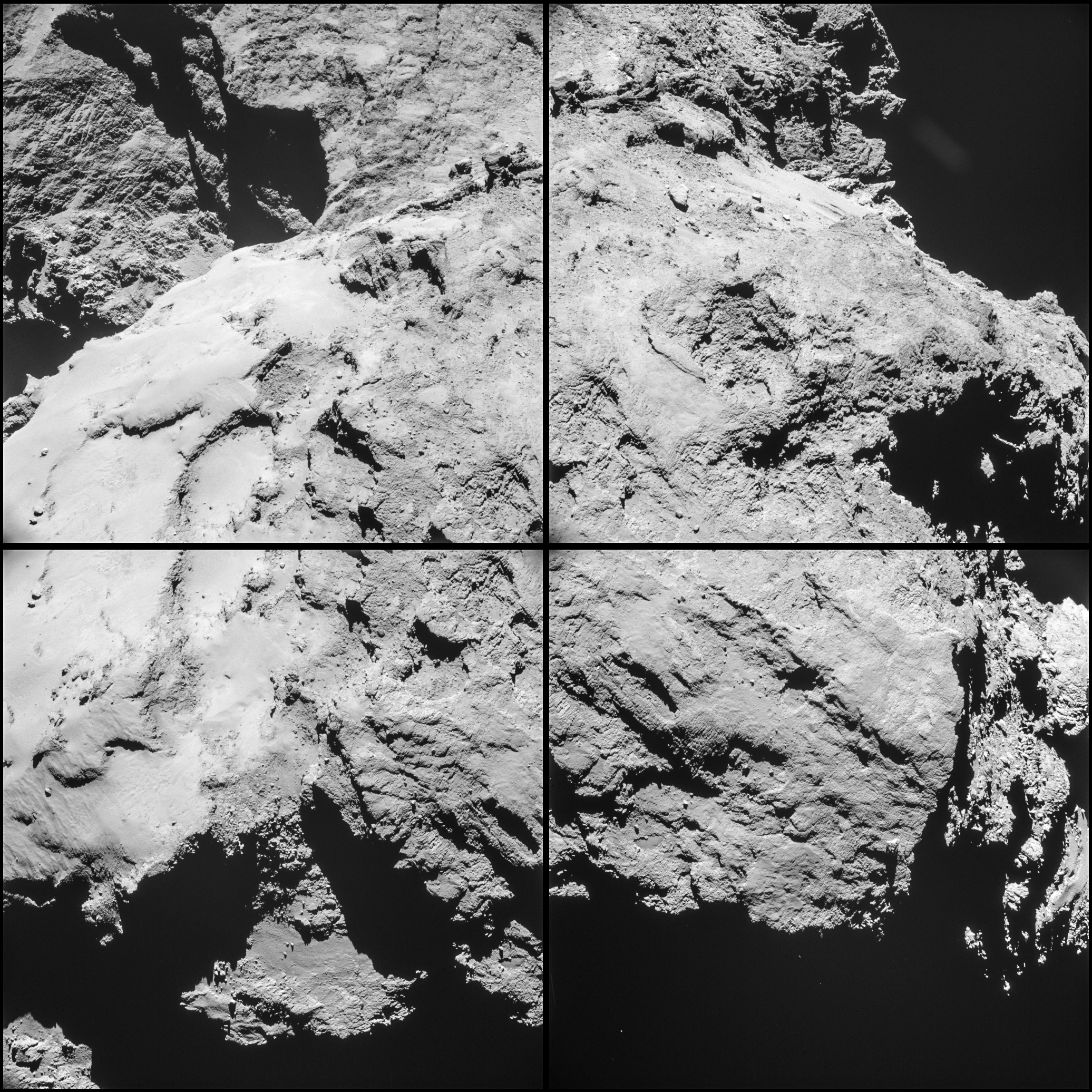
On Saturday, Feb. 14, the Rosetta spacecraft swooped low over the surface of comet 67P/C-G in the first dedicated close pass of its mission, coming within a scant 6 km (3.7 miles) at 12:41 UTC. The image above is a mosaic of four individual NavCam images acquired just shortly afterwards, when Rosetta was about 8.9 km from the comet.
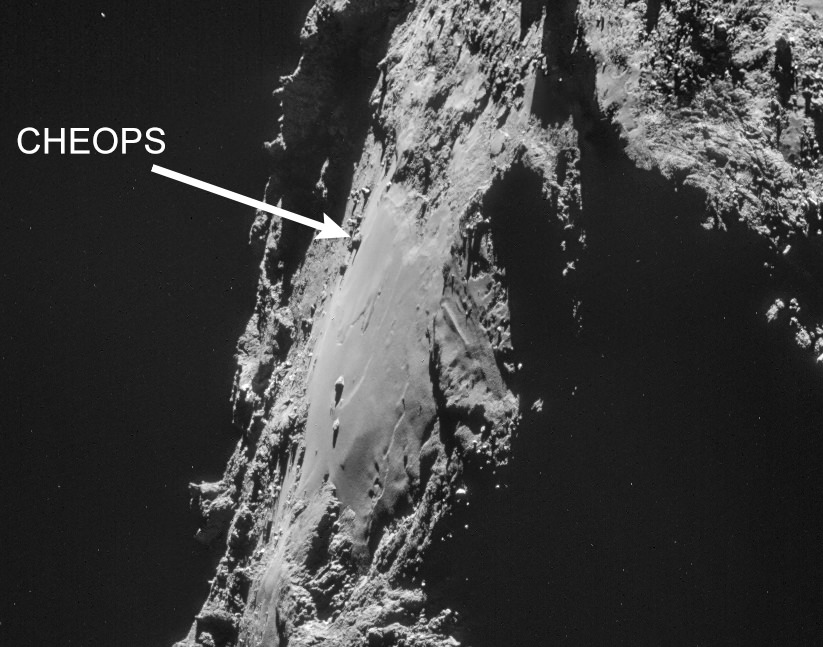
The 45m “Cheops” boulder on comet 67P/C-G (ESA/Rosetta/Navcam)
The view above looks across much of the Imhotep region along the flat bottom of comet 67P’s larger lobe. (See a map of 67P’s named regions here.) At the top is the flat “plain” where the Cheops boulder cluster can be seen – the largest of which is 45 meters (148 feet) across.
The zero phase angle of sunlight during the pass made for fairly even illumination across the comet’s surface.
The image scale on the full mosaic is 0.76 m/pixel and the entire view encompasses a 1.35 × 1.37 km-wide area.
Other NavCam images acquired before and after the pass have been assembled into mosaics – check those out below:
Four-image mosaic made from NavCam images acquired on Feb. 14, 2015 at a distance of 35 km. Credits: ESA/Rosetta/NavCam – CC BY-SA IGO 3.0.
Four-image mosaic made from NavCam images acquired on Feb. 14, 2015 at a distance of 12.6 km. Credits: ESA/Rosetta/NavCam – CC BY-SA IGO 3.0.
Four-image mosaic made from NavCam images acquired on Feb. 14, 2015 at 19:42 UTC at a distance of 31.6 km. Credits: ESA/Rosetta/NavCam – CC BY-SA IGO 3.0.
In addition to NavCam images of 67P, Rosetta also acquired high-resolution OSIRIS images of the comet and gathered scientific data about its coma environment during the flyby. These data will be downlinked and processed over the next week or so.
Flybys will be regular parts of Rosetta’s operations over the course of 2015, but due to the comet’s increasing activity none will bring the spacecraft as close as this particular pass.
Rosetta is now moving out to a distance of about 250 km (155 miles) from 67P. Watch a video below of how the Feb. 14 flyby was planned and executed:
(Also, on Feb. 9, Rosetta captured a full-frame NavCam image of 67P from 105 km. I’ve edited that image for additional contrast and added a blue tint. Enjoy!)
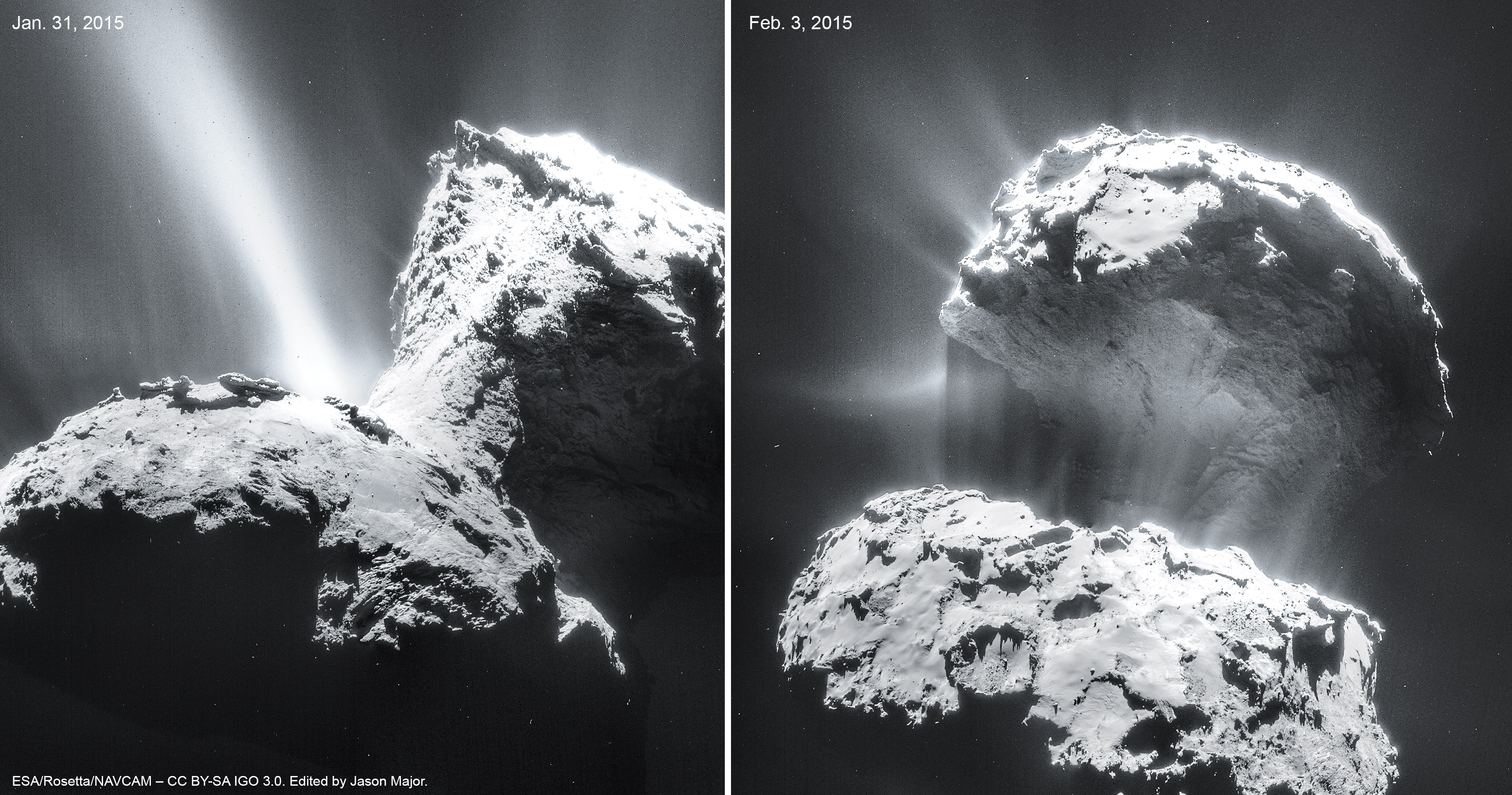
Jet activity on Comet 67P/C-G imaged on Jan. 31 and Feb. 3, 2015. Credits: ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0. Edit by Jason Major.
First off: no, comet 67P/Churyumov-Gerasimenko is not about to explode or disintegrate. But as it steadily gets nearer to the Sun the comet’s jets are getting more and more active and they’re putting on quite a show for the orbiting Rosetta spacecraft! Click the image for a jeterrific hi-res version.
The images above were captured by Rosetta’s NavCam on Jan. 31 and Feb. 3 from a distance of about 28 km (17 miles). Each is a mosaic of four separate NavCam acquisitions and they have been adjusted and tinted in Photoshop by yours truly to further enhance the jets’ visibility. (You can view the original image mosaics and source frames here and here.)
These dramatic views are just a hint at what’s in store; 67P’s activity will only be increasing in the coming weeks and months and, this weekend, Rosetta will be swooping down for an extreme close pass over its surface!
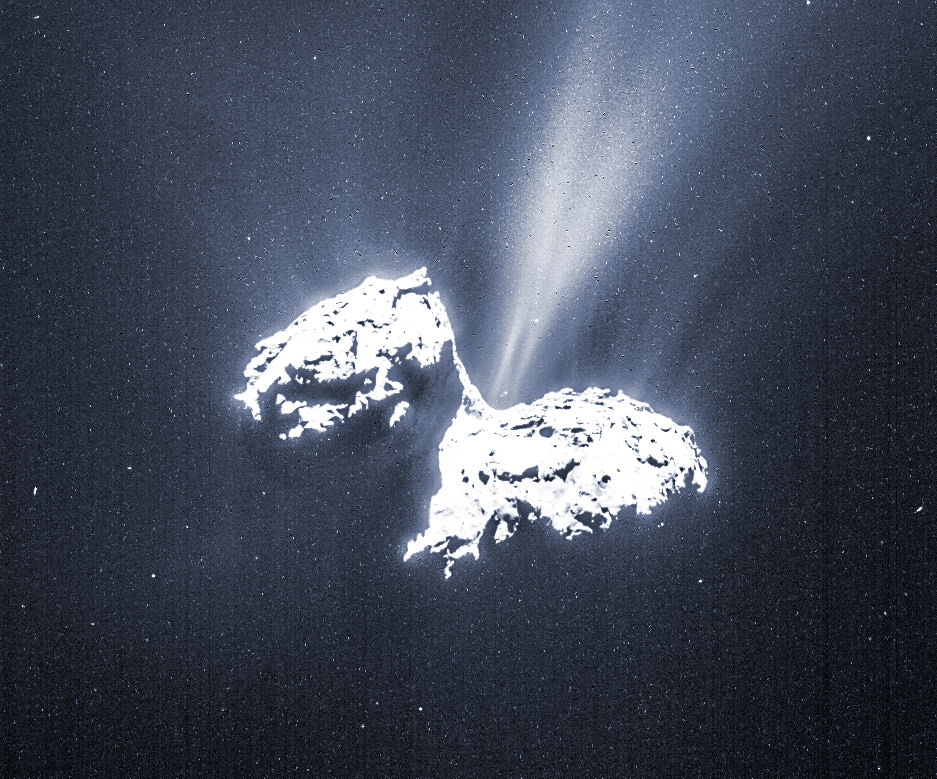
Detail of 67P from the Feb. 3 NavCam image
This Saturday, Feb. 14, Rosetta will be performing a very close pass of the comet’s nucleus, soaring over the Imhotep region at an altitude of only 6 km (3.7 miles) at 12:41 UTC. This will allow the spacecraft to closely image the comet’s surface, as well as investigate the behavior of its jets and how they interact with its developing coma.
“The upcoming close flyby will allow unique scientific observations, providing us with high-resolution measurements of the surface over a range of wavelengths and giving us the opportunity to sample – taste or sniff – the very innermost parts of the comet’s atmosphere,” said Rosetta project scientist Matt Taylor.
UPDATE: Here’s an image of 67P captured by Rosetta on Feb. 6 from a distance of 124 km (77 miles) as it moved into a higher orbit in preparation of its upcoming close pass. It’s the first single-frame image of the comet since leaving bound orbits.
Four-image mosaic of 67P/Churyumov-Gerasimenko acquired on Jan. 16, 2015 (ESA/Rosetta/NAVCAM – CC BY-SA IGO 3.0)
A particularly dramatic view of comet 67P/C-G due to the angle of solar illumination, this is a mosaic made from four images acquired by Rosetta’s NavCam on January 16, 2015, from a distance of 28.4 km (17.6 miles). The assembled image shows the larger “bottom” lobe of 67P, with a flat region called Imhotep along the left side and, on the lower right, the transition area stretching up to the comet’s smaller “head” lobe. Outgassing jets can be seen as faint streaks at the upper right, and ejected dust grains show up as bright specks above its surface.
Also in this view is one of 67P’s larger boulders, a somewhat pyramid-shaped rock dubbed “Cheops.” Can you spot it?
There it is!
Position of the Cheops boulder on 67P (ESA/Rosetta/Navcam)
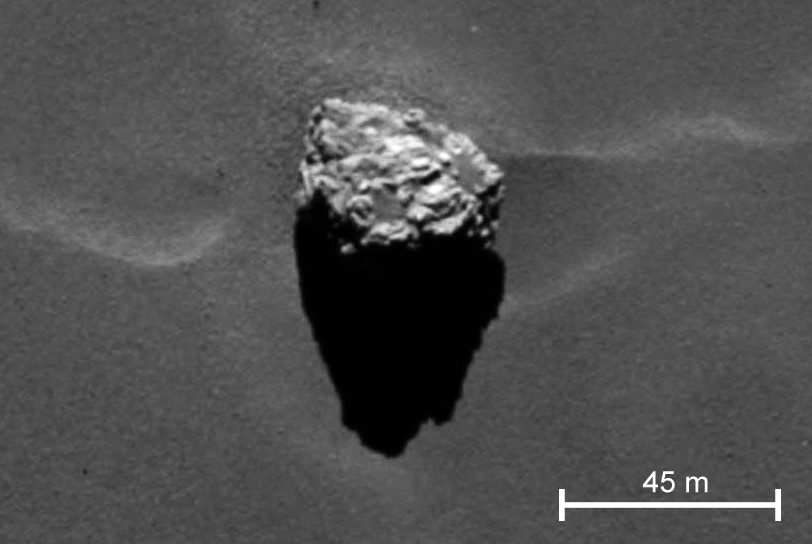
One in a cluster of boulders on 67P’s “underside,” Cheops is about 45 meters wide and 25 meters high (148 x 82 feet).
When it was first observed in Rosetta images Cheops and the nearby cluster reminded scientists of the pyramids at Giza in Egypt, and so it was named for the largest of those pyramids, the Great Pyramid, a tomb for the pharaoh Cheops (the Hellenized name for Khufu) built around 2,550 BCE. (See another view of the Cheops cluster here.)
OSIRIS image of Cheops acquired on Sept. 19, 2014 (ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA)
Scientists are still working to determine the nature of 67P’s boulders. It’s not yet known what they are made of or how they came to be where they are observed today. Did they fall into their current positions? Or were they exposed upwards from below as a result of the comet’s activity? And why do they have alternating rough and smooth areas on their surfaces?
“It almost looks as if loose dust covering the surface of the comet has settled in the boulder’s cracks. But, of course, it is much too early to be sure,” said OSIRIS Principal Investigator Holger Sierks from the Max Planck Institute for Solar System Research (MPS) in Germany.
As comet 67P approaches perihelion over the course of the next six months we will get to see firsthand via Rosetta what sorts of changes occur to its surface features, including office-building-sized boulders like Cheops.
Also, for a quick look at some of 67P’s “vital stats” click here. (Added 1/22)
Jagged cliffs and prominent boulders are visible in this image taken by OSIRIS on 5 September 2014 from a distance of 62 kilometres from comet 67P/Churyumov-Gerasimenko. The left part of the image shows a side view of the comet’s 'body', while the right is the back of its 'head'. One pixel corresponds to 1.1 metres.
Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
Today ESA released the latest high resolution images of Comet 67P/Churyumov-Gerasimenko taken by the OSIRIS science camera on Sept. 5, and is shown above.
Jagged cliffs and prominent boulders are clearly visible in unprecedented detail on the head and body of Comet 67P displaying a multitude of different terrains in the new image taken from a distance of 62 kilometers.
Meanwhile the Rosetta science team is using the OSIRIS and navcam camera images to create a preliminary map of the comets surface. The map is color coded to divide the comet into several distinct morphological regions.
Several morphologically different regions are indicated in this preliminary map, which is oriented with the comet’s ‘body’ in the foreground and the ‘head’ in the background. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA
“With various areas dominated by cliffs, depressions, craters, boulders or even parallel grooves, 67P/C-G displays a multitude of different terrains. Some areas even appear to have been shaped by the comet’s activity,” the Rosetta team said in the release.
The images were also shown at today’s scientific presentations at a special Rosetta research session at the 2014 European Planetary Science Congress being held in Cascais, Portugal.
The scientists are striving to meld all the imagery and data gathered from Rosetta’s 11 instruments in order to elucidate the composition and evolution of the different regions.
The mapping data is also being used to narrow the ‘Top 5’ Philae landing site candidates down to a primary and backup choice.
The final landing site selections will be made at a meeting being held this weekend on 13 and 14 September 2014 between the Rosetta Lander Team and the Rosetta orbiter team at CNES in Toulouse, France.
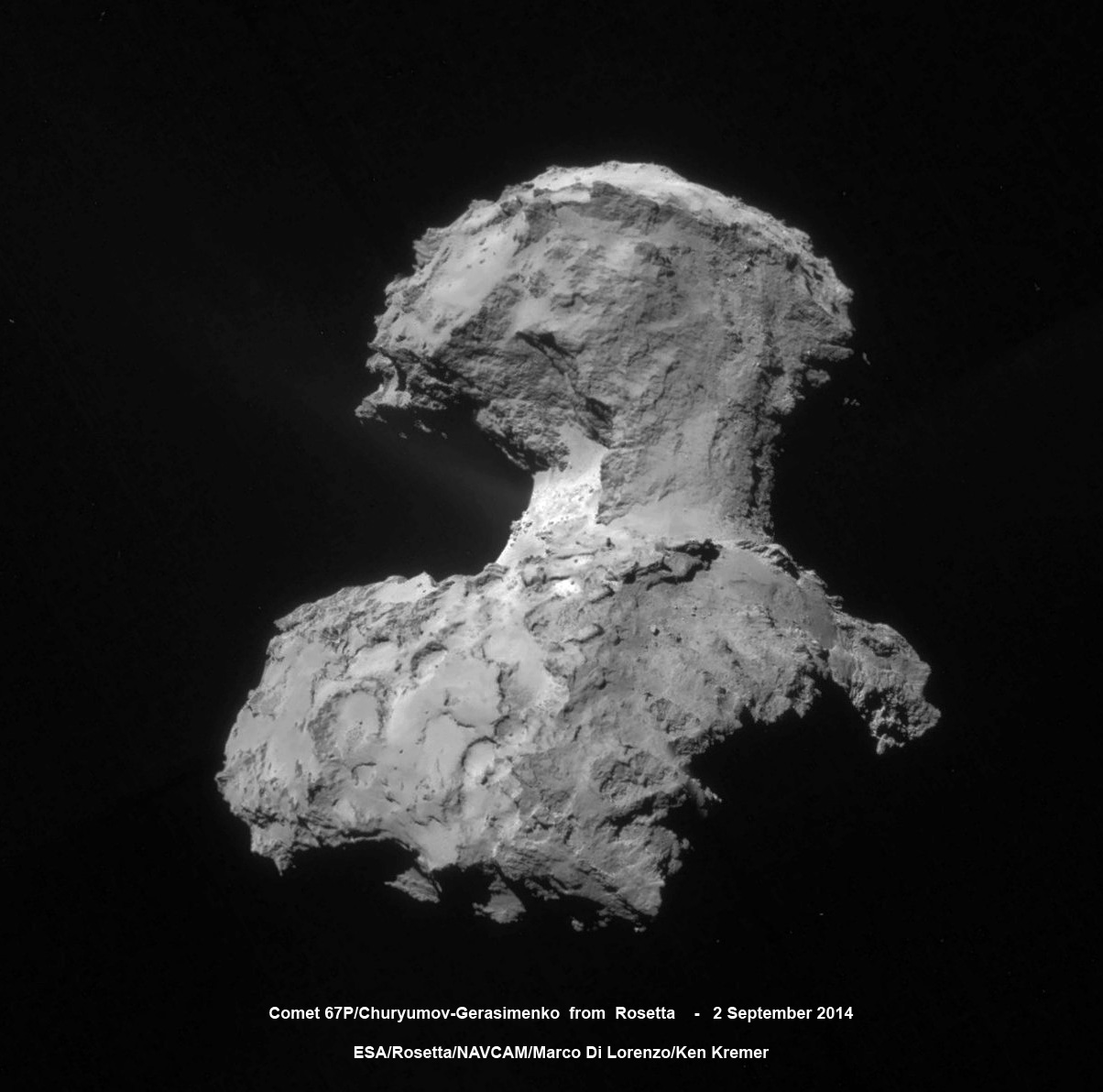
Four-image photo mosaic comprising images taken by Rosetta’s navigation camera on 2 September 2014 from a distance of 56 km from comet 67P/Churyumov-Gerasimenko. The mosaic has been contrast enhanced to bring out details of the coma, especially of jets of dust emanating from the neck region.
Credits: ESA/Rosetta/NAVCAM/Marco Di Lorenzo/Ken Kremer – kenkremer.com
Philae’s history making landing on comet 67P is currently scheduled for around Nov. 11, 2014, and will be entirely automatic. The 100 kg lander is equipped with 10 science instruments.
The three-legged lander will fire two harpoons and use ice screws to anchor itself to the 4 kilometer (2.5 mile) wide comet’s surface. Philae will collect stereo and panoramic images and also drill 23 centimeters into and sample its incredibly varied surface.
Four-image photo mosaic comprising images taken by Rosetta’s navigation camera on 31 August 2014 from a distance of 61 km from comet 67P/Churyumov-Gerasimenko. The mosaic has been rotated and contrast enhanced to bring out details. The comet nucleus is about 4 km across. Credits: ESA/Rosetta/NAVCAM/Ken Kremer/Marco Di Lorenzo
The comet nucleus is about 4 km (2.5 mi) across.
The team is in a race against time to select a suitable landing zone soon since the comet warms up and the surface becomes ever more active as it swings in closer to the sun and makes the landing ever more hazardous.
Stay tuned here for Ken’s continuing Rosetta, Earth and Planetary science and human spaceflight news.
Five candidate sites were identified on Comet 67P/Churyumov-Gerasimenko for Rosetta’s Philae lander. The approximate locations of the five regions are marked on these OSIRIS narrow-angle camera images taken on 16 August 2014 from a distance of about 100 km. Enlarged insets below highlight 5 landing zones. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Processing: Marco Di Lorenzo/Ken Kremer
Four-image photo mosaic comprising images taken by Rosetta's navigation camera on 31 August 2014 from a distance of 61 km from comet 67P/Churyumov-Gerasimenko. The mosaic has been contrast enhanced to bring out details. The comet nucleus is about 4 km across. Credits: ESA/Rosetta/NAVCAM/Ken Kremer/Marco Di Lorenzo
Four-image photo mosaic comprising images taken by Rosetta’s navigation camera on 31 August 2014 from a distance of 61 km from comet 67P/Churyumov-Gerasimenko. The mosaic has been contrast enhanced to bring out details. The comet nucleus is about 4 km across.
Credits: ESA/Rosetta/NAVCAM/Ken Kremer – kenkremer.com/Marco Di Lorenzo
See rotated version and 4 individual images below[/caption]
ESA’s Rosetta orbiter has now moved in so close to its comet quarry that the primordial body overwhelms the screen, and thus its snapping mapping mosaics to capture the complete scene of the bizarre world so it can find the most suitable spot for the momentous Philae landing – upcoming in mid-November.
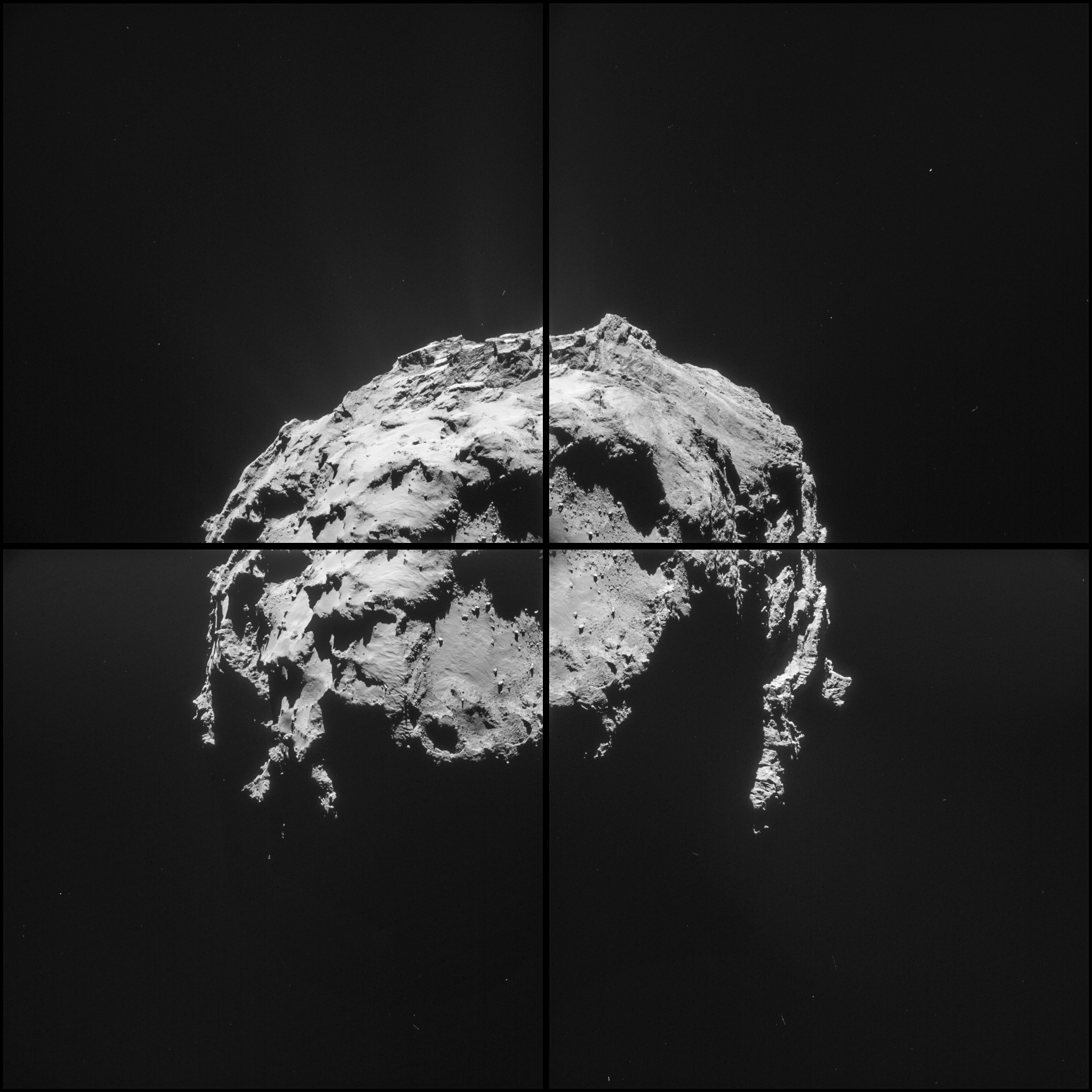
In fact Rosetta has ‘drawn and quartered’ the comet to collect high resolution views of Comet 67P/Churyumov-Gerasimenko with the navcam camera on Sunday, August 31.
The navcam quartet has just been posted to the Rosetta portal today, Monday, September 1, 2014. ESA invited readers to create global photo mosaics.
See above our four frame photo mosaic of navcam images Rosetta took on Aug. 31.
The purpose of taking the images as well as spectra and physical measurements up close is to find a ‘technically feasible’ Philae touchdown site that is both safe and scientifically interesting.
Below is the Rosetta teams four image navcam montage, arranged individually in a 2 x 2 raster.
Four-image montage comprising images taken by Rosetta’s navigation camera on 31 August 2014 from a distance of 61 km from comet 67P/Churyumov-Gerasimenko. The comet nucleus is about 4 km across. Credits: ESA/Rosetta/NAVCAM
The navcam image raster sequence was taken from a distance of 61 km from comet 67P.
“Roughly one quarter of the comet is seen in the corner of each of the four images. The four images are taken over an approximately 20 minute period, meaning that there is some motion of the spacecraft and rotation of the comet between the images. As a result, making a clean mosaic out of the four images is not simple,” according to ESA’s Rosetta blog.
As I reported here last week, the ‘Top 5’ landing site candidates have been chosen for the Rosetta orbiters piggybacked Philae lander for humankind’s first attempt to land on a comet.
The potential touchdown sites were announced on Aug. 25, based on a thorough analysis of high resolution measurements collected by ESA’s Rosetta spacecraft over the prior weeks since it arrived at the pockmarked Comet 67P/Churyumov-Gerasimenko on Aug. 6, 2014.
See our montage of the ‘Top 5’ landing sites below.
Five candidate sites were identified on Comet 67P/Churyumov-Gerasimenko for Rosetta’s Philae lander. The approximate locations of the five regions are marked on these OSIRIS narrow-angle camera images taken on 16 August 2014 from a distance of about 100 km. Enlarged insets below highlight 5 landing zones. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA Processing: Marco Di Lorenzo/Ken Kremer
Rosetta is a mission of many firsts, including history’s first ever attempt to orbit a comet for long term study.
Philae’s history making landing on comet 67P is currently scheduled for around Nov. 11, 2014, and will be entirely automatic. The 100 kg lander is equipped with 10 science instruments.
The new images released today are the best taken so far by the Navcam camera. The probes OSIRIS science camera are even more detailed, and will hopefully be released by ESA soon!
“This is the first time landing sites on a comet have been considered,” said Stephan Ulamec, Lander Manager at DLR (German Aerospace Center), in an ESA statement.
Since rendezvousing with the comet after a decade long chase of over 6.4 billion kilometers (4 Billion miles), a top priority task for the science and engineering team leading Rosetta has been “Finding a landing strip” for the Philae comet lander.
“The clock is ticking’ to select a suitable landing zone soon since the comet warms up and the surface becomes ever more active as it swings in closer to the sun and makes the landing ever more hazardous.
This image of comet 67P/Churyumov-Gerasimenko shows the diversity of surface structures on the comet’s nucleus. It was taken by the Rosetta spacecraft’s OSIRIS narrow-angle camera on August 7, 2014. At the time, the spacecraft was 65 miles (104 kilometers) away from the 2.5 mile (4 kilometer) wide nucleus. Credit: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA/Enhanced processing Marco Di Lorenzo/Ken Kremer
The three-legged lander will fire two harpoons and use ice screws to anchor itself to the 4 kilometer (2.5 mile) wide comet’s surface. Philae will collect stereo and panoramic images and also drill 23 centimeters into and sample its incredibly varied surface.
Stay tuned here for Ken’s continuing Rosetta, Earth and Planetary science and human spaceflight news.
Four-image photo mosaic comprising images taken by Rosetta’s navigation camera on 31 August 2014 from a distance of 61 km from comet 67P/Churyumov-Gerasimenko. The mosaic has been rotated and contrast enhanced to bring out details. The comet nucleus is about 4 km across. Credits: ESA/Rosetta/NAVCAM/Ken Kremer/Marco Di Lorenzo
ESA’s Rosetta spacecraft on final approach to Comet 67P/Churyumov-Gerasimenko in early August 2014. This collage of navcam imagery from Rosetta was taken on Aug. 1, 2, 3 and 4 from distances of 1026 km, 500 km, 300 km and 234 km. Not to scale. Credit: ESA/Rosetta/NAVCAM – Collage/Processing: Marco Di Lorenzo/Ken Kremer- kenkremer.com
























{kind=link}