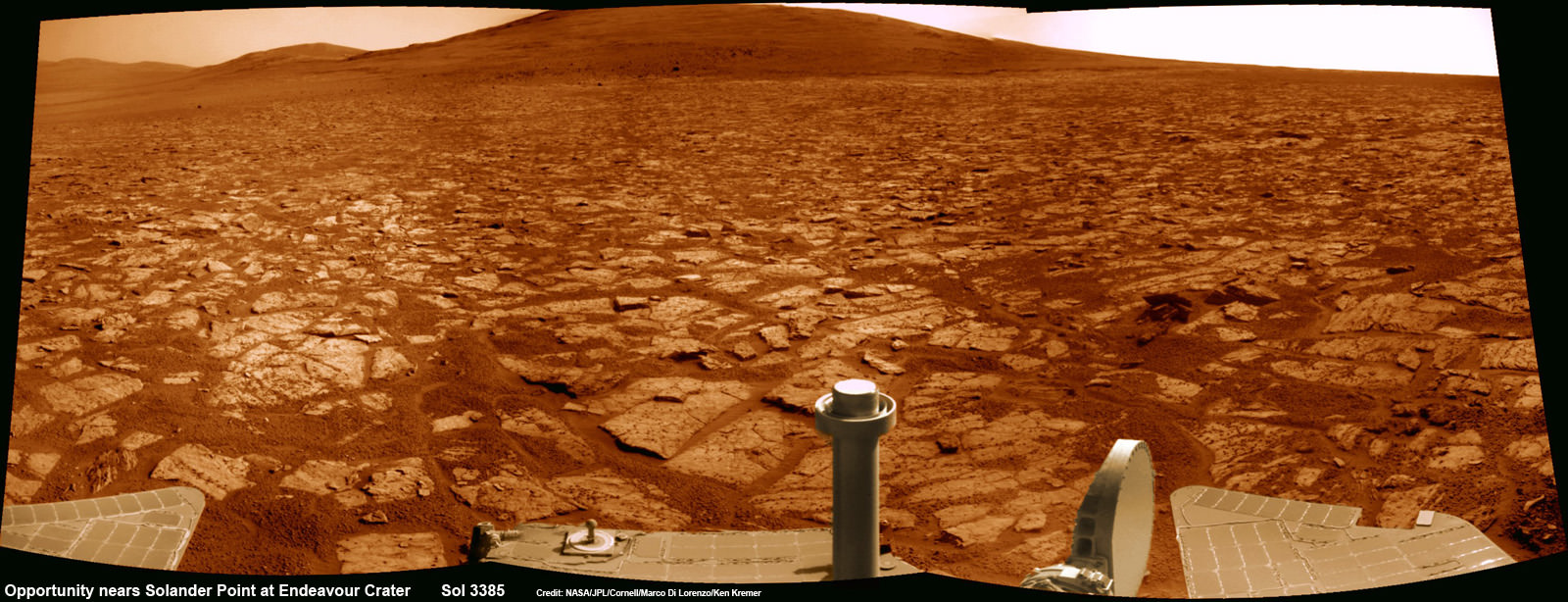
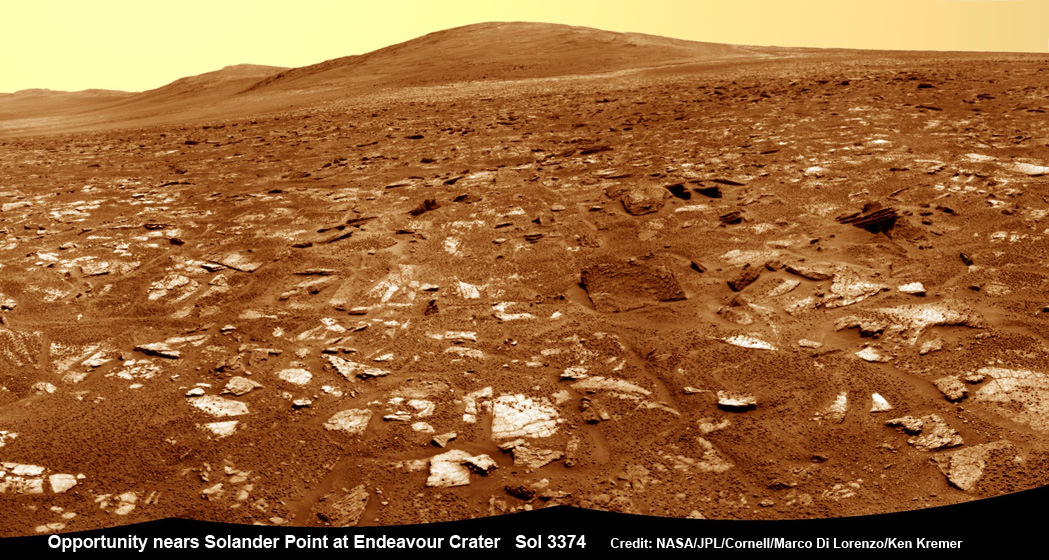
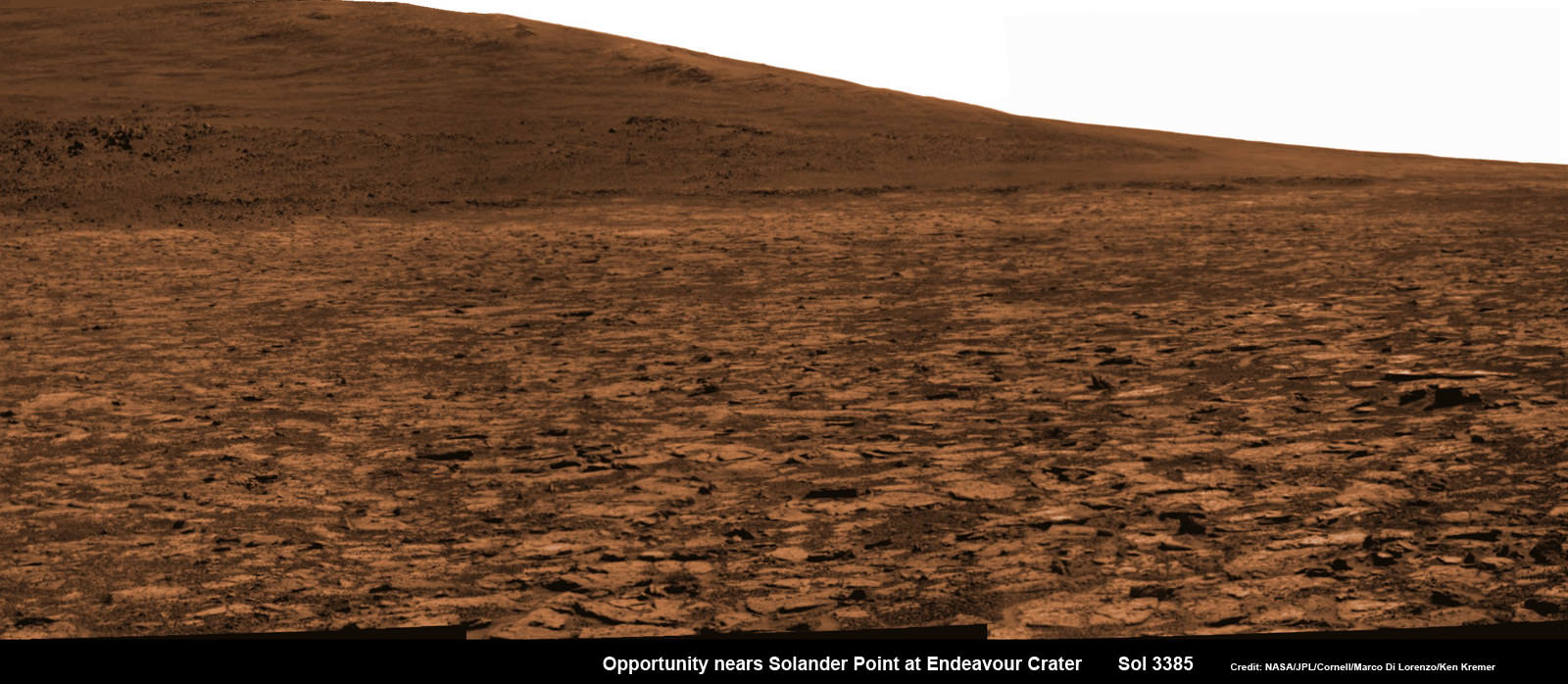
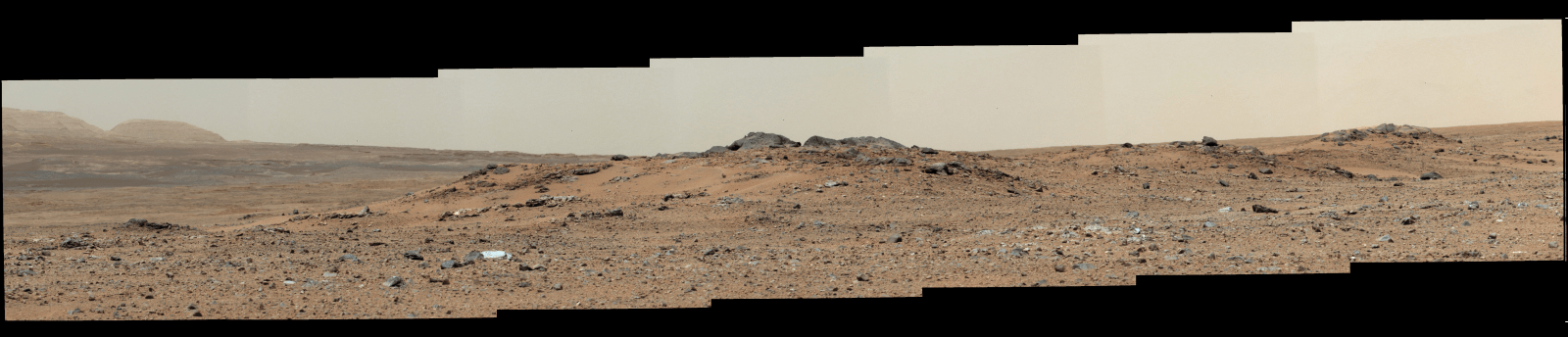
Opportunity starts scaling Solander Point – her 1st mountain climbing goal
See the tilted terrain and rover tracks in this look-back mosaic view from Solander Point peering across the vast expanse of huge Endeavour Crater. Opportunity will ascend the mountain looking for clues indicative of a Martian habitable environment. This navcam camera mosaic was assembled from raw images taken on Sol 3431 (Sept.18, 2013). Credit: NASA/JPL/Cornell/Marco Di Lorenzo/Ken Kremer (kenkremer.com). See the complete panoramic view below[/caption]
NASA’s intrepid Opportunity rover has begun an exciting new phase in her epic journey – the ascent of Solander Point, the first mountain she will ever climb, after roving the Red Planet for nearly a decade. See the rovers tilted look-back view in our Sol 3431 mosaic above.
Furthermore, ground breaking discoveries providing new clues in search of the chemical ingredients required to sustain life are sure to follow as the rover investigates intriguing stratographic deposits distributed amongst Solander’s hills layers.
Why ? Because NASA’s powerful Mars Reconnaissance Orbiter (MRO) circling overhead has also recently succeeded in collecting “really interesting” new high resolution survey scans of Solander Point! Read my prior pre-survey account – here.
So says Ray Arvidson, the mission’s deputy principal scientific investigator, in an exclusive Opportunity news update to Universe Today. The new MRO data are crucial for targeting the rover’s driving in coming months.
After gaining approval from NASA, engineers successfully aimed the CRISM mineral mapping spectrometer aboard MRO at Solander Point and captured reams of new high resolution measurements that will inform the scientists about the mineralogical make up of Solander.
“CRISM data were collected,” Arvidson told Universe Today.
“They show really interesting spectral features in the [Endeavour Crater] rim materials.”
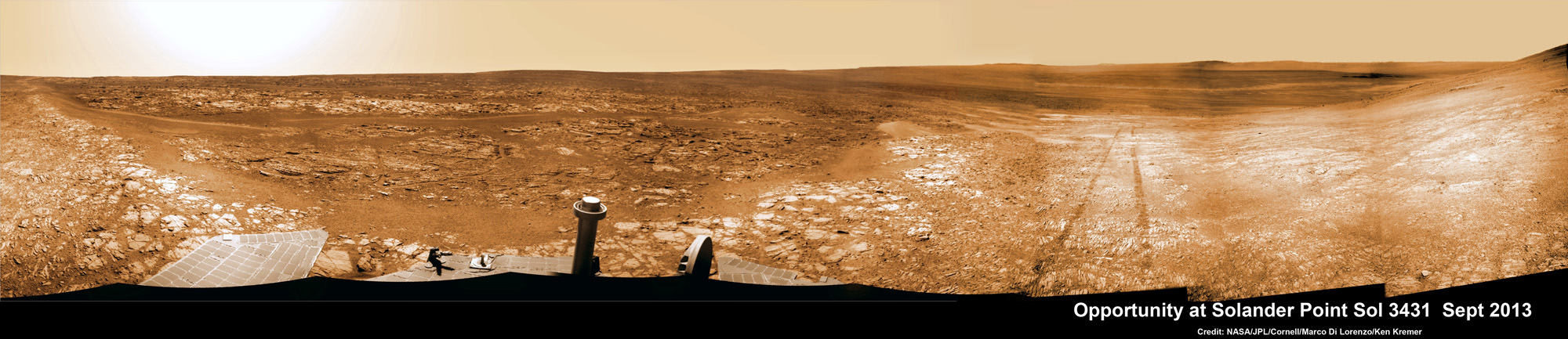
See the tilted terrain and rover tracks in this look-back panoramic view from Solander Point peering across the vast expanse of huge Endeavour Crater. Opportunity will ascend the mountain looking for clues indicative of a Martian habitable environment. This navcam camera mosaic was assembled from raw images taken on Sol 3431 (Sept.18, 2013). Credit: NASA/JPL/Cornell/Marco Di Lorenzo/Ken Kremer (kenkremer.com).
Solander Point is an eroded ridge located along the western rim of huge Endeavour Crater where Opportunity is currently located.
“Opportunity is on the bench at the tip of Solander Point,” Ray Arvidson told Universe Today exclusively. Arvidson is the mission’s deputy principal scientific investigator from Washington University in St. Louis, Mo.
At the bench, the long lived rover has begun scaling Solander in search of science and life giving sun.
“The CRISM data are being discussed by the MER [Mars Exploration Rover] Team this week,” Arvidson told me.
And it will take some time to review and interpret the bountiful new spectral data and decide on a course of action.
“For the CRISM data analysis we will have the MER Team see the results and agree.”
Expect that analysis to take a “couple of weeks” said Arvidson.
The new CRISM survey from Mars orbit will vastly improve the spectral resolution – from 18 meters per pixel down to 5 meters per pixel.

Another important point about ‘Solander Point’ is that it also offers northerly tilted slopes that will maximize the power generation during Opportunity’s upcoming 6th Martian winter.
In order to survive those Antarctic like, ‘bone chilling” winter temperatures on the Red Planet and continue with her epic mission, the engineers must drive the rover so that the solar wings are pointed favorably towards the sun.
And don’t forget that winter’s last six full months – that’s twice as long on Mars as compared to Earth.
The daily solar power output has been declining as Mars southern hemisphere enters late fall.
After traversing several months across the crater floor from the Cape York rim segment to Solander, Opportunity arrived at the foothills of Solander Point.
Solander and Cape York are part of a long chain of eroded segments of the crater wall of Endeavour crater which spans a humongous 14 miles (22 kilometers) wide.
Solander Point may harbor deposits of phyllosilicate clay minerals – which form in neutral pH water – in a thick layer of rock stacks indicative of a past Martian habitable zone.
The science team is looking at the new CRISM measurements, hunting for signatures of phyllosilicate clay minerals and other minerals and features of interest.
“Opportunity is on the bench on the northwest side of the tip of Solander Point,” Arvidson explained.
Since pulling up to Solander, the robot has spent over a month investigating the bench surrounding the mountain to put it the entire alien Martian terrain in context for a better understanding of Mars geologic history over billions of years.
Eons ago, Mars was far warmer and wetter and more hospitable to life.
“The rover is finishing up work on defining the stratigraphy, structure, and composition of the bench materials.”
“We are working our way counterclockwise on the bench to reach the steep slopes associated with the Noachian outcrops that are part of the Endeavour rim,” Arvidson elaborated.
“Opportunity is slightly tipped to the north to catch the sun.”
“Probably this week we will direct the rover to head south along the western boundary between the bench and the rim materials, keeping on northerly tilts,” Arvidson told me.
How does the bench at Solander compare to other areas investigated at Endeavour crater, I asked.
“The Solander Bench looks like the bench we saw around Cape York and around Sutherland Point and Nobbys Head,” replied Arvidson.

The rover recently investigated an outcrop target called ‘Poverty Bush’. She deployed her 3 foot long (1 meter) robotic arm and collected photos with the Microscopic Imager (MI) and collected several days of spectral measurements with the Alpha Particle X-ray Spectrometer (APXS).
Thereafter she resumed driving to the west/northwest around Solander.
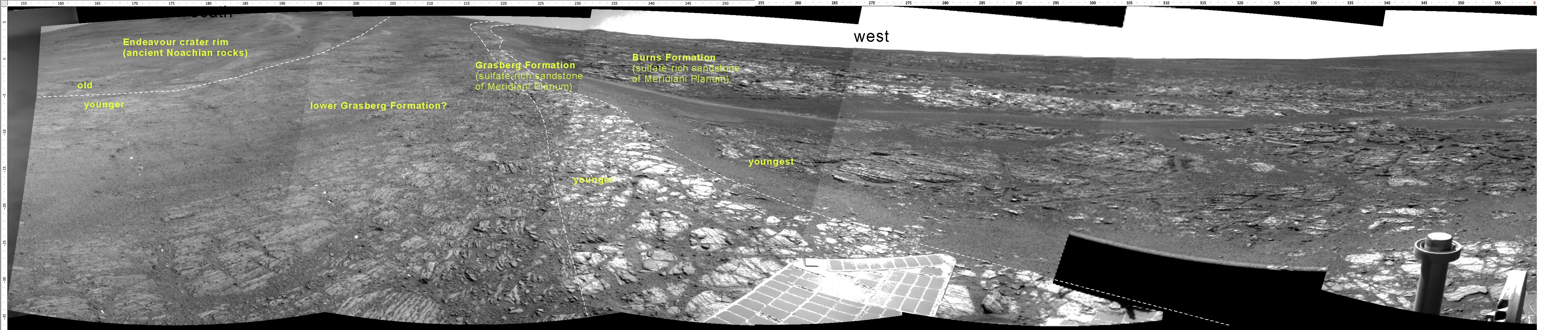
“On September 13, Opportunity finally landed on the bed rock of Solander Point,” wrote Larry Crumpler, a science team member from the New Mexico Museum of Natural History & Science, in his latest field report about the MER mission.
“The terrain right here is awesome,” according to Crumpler.
“There are several geologic units that are overlapping here. And Opportunity is sitting on the contact.”
“On the east side of the contact are rocks maybe a billion years older than those on the west side of the contact. This sort of age progression is what geologists look for when trying to understand the past by reading the rocks.”
“Opportunity is allowing us for the first time to do not only fundamental geographic exploration, but it is enabling on the ground geologic study of past climatic history on Mars,” notes Crumpler.
Today marks Opportunity’s 3441st Sol or Martian Day roving Mars – for what was expected to be only a 90 Sol mission.

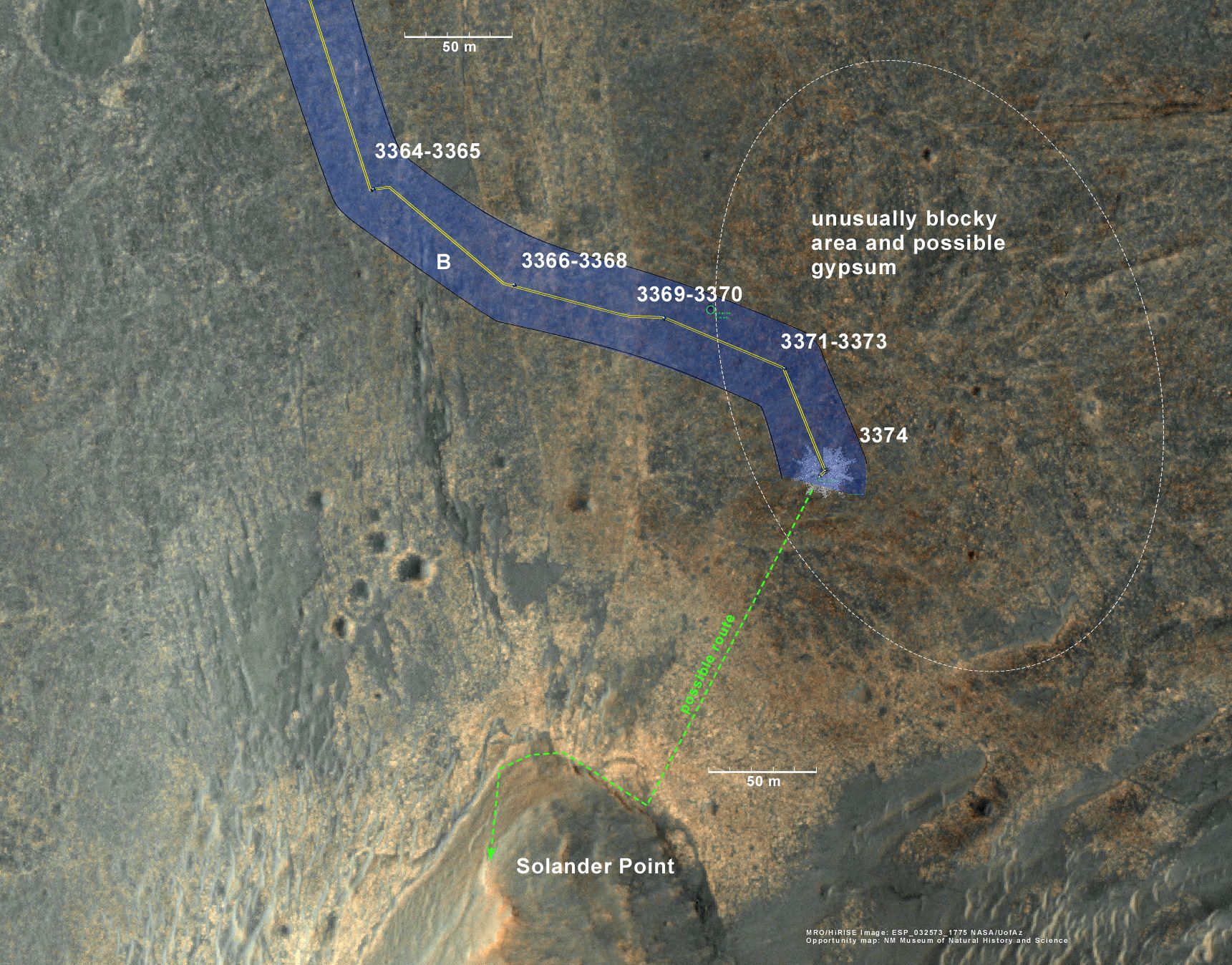
This map shows the entire path the rover has driven during more than 9 years and over 3431 Sols, or Martian days, since landing inside Eagle Crater on Jan 24, 2004 to current location at foothills of Solander Point at the western rim of Endeavour Crater. Rover is now ascending Solander. Opportunity discovered clay minerals at Esperance – indicative of a habitable zone. Credit: NASA/JPL/Cornell/ASU/Marco Di Lorenzo/Ken Kremer
So far she has snapped over 184,500 amazing images on the first overland expedition across the Red Planet.
Her total odometry stands at over 23.82 miles (38.34 kilometers) since touchdown on Jan. 24, 2004 at Meridiani Planum.
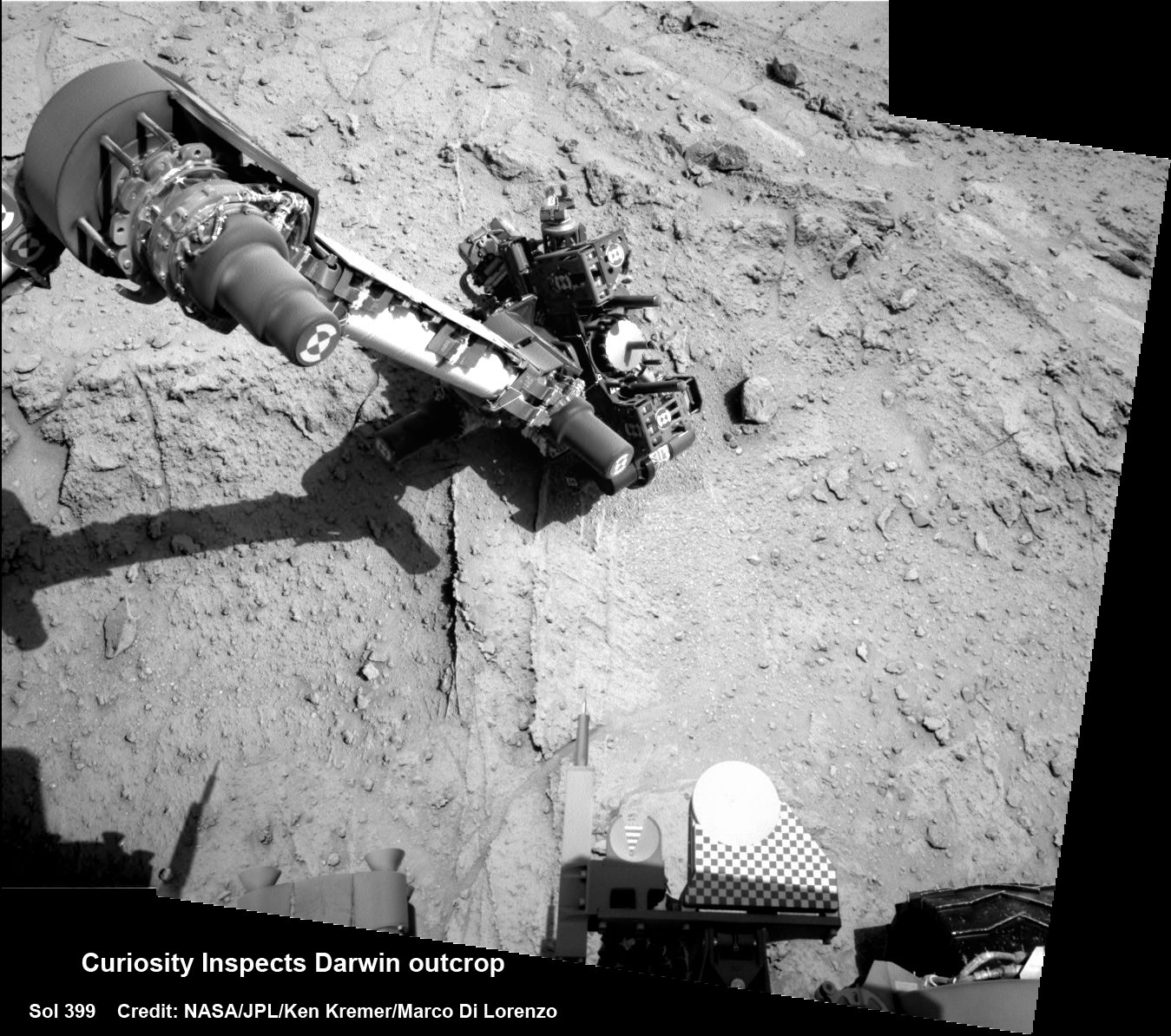
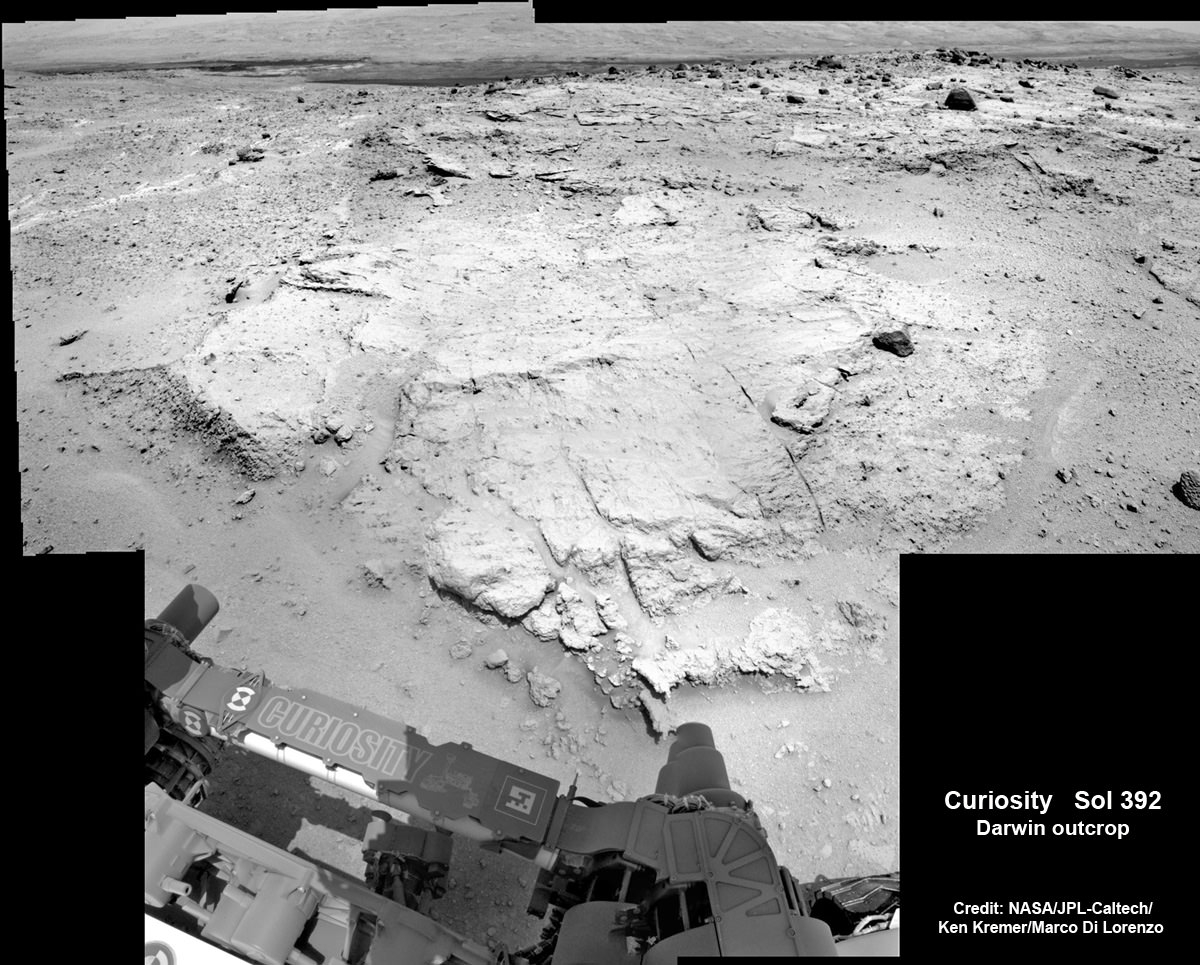
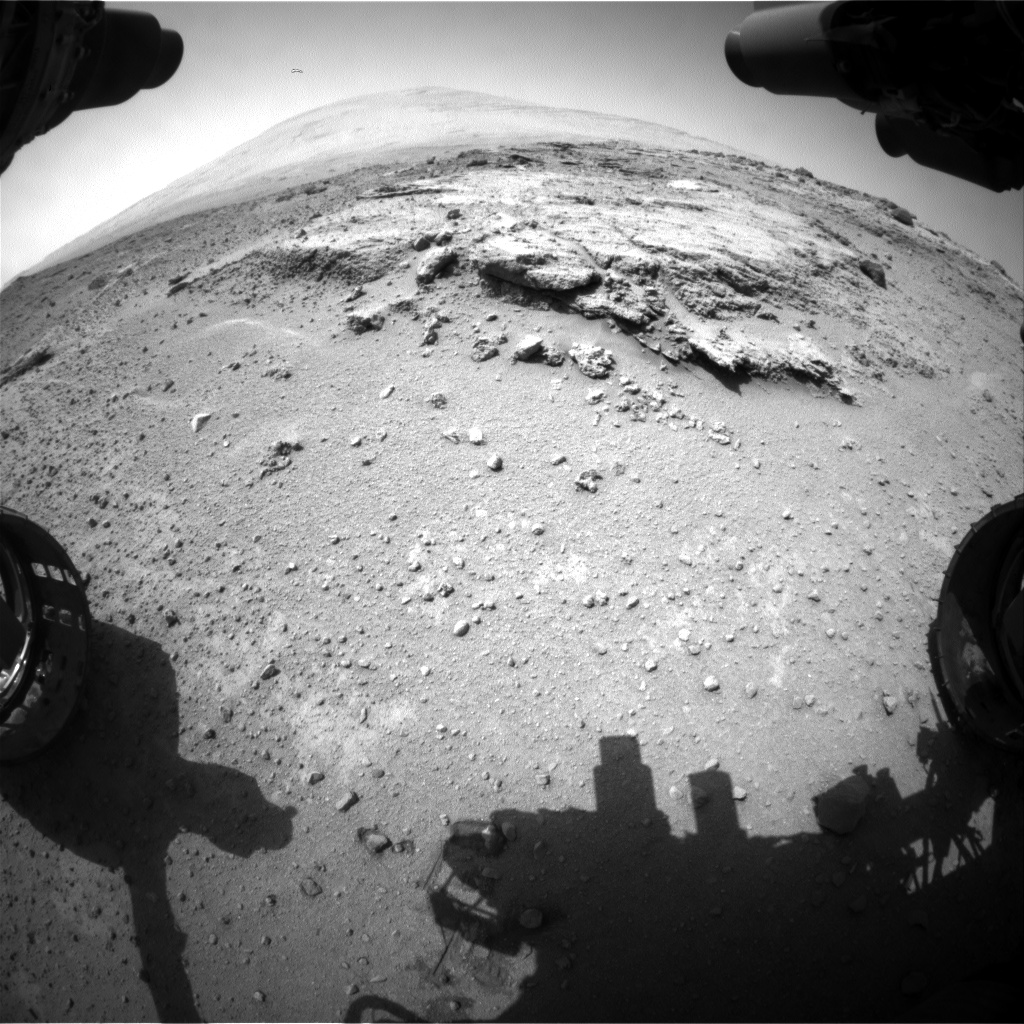
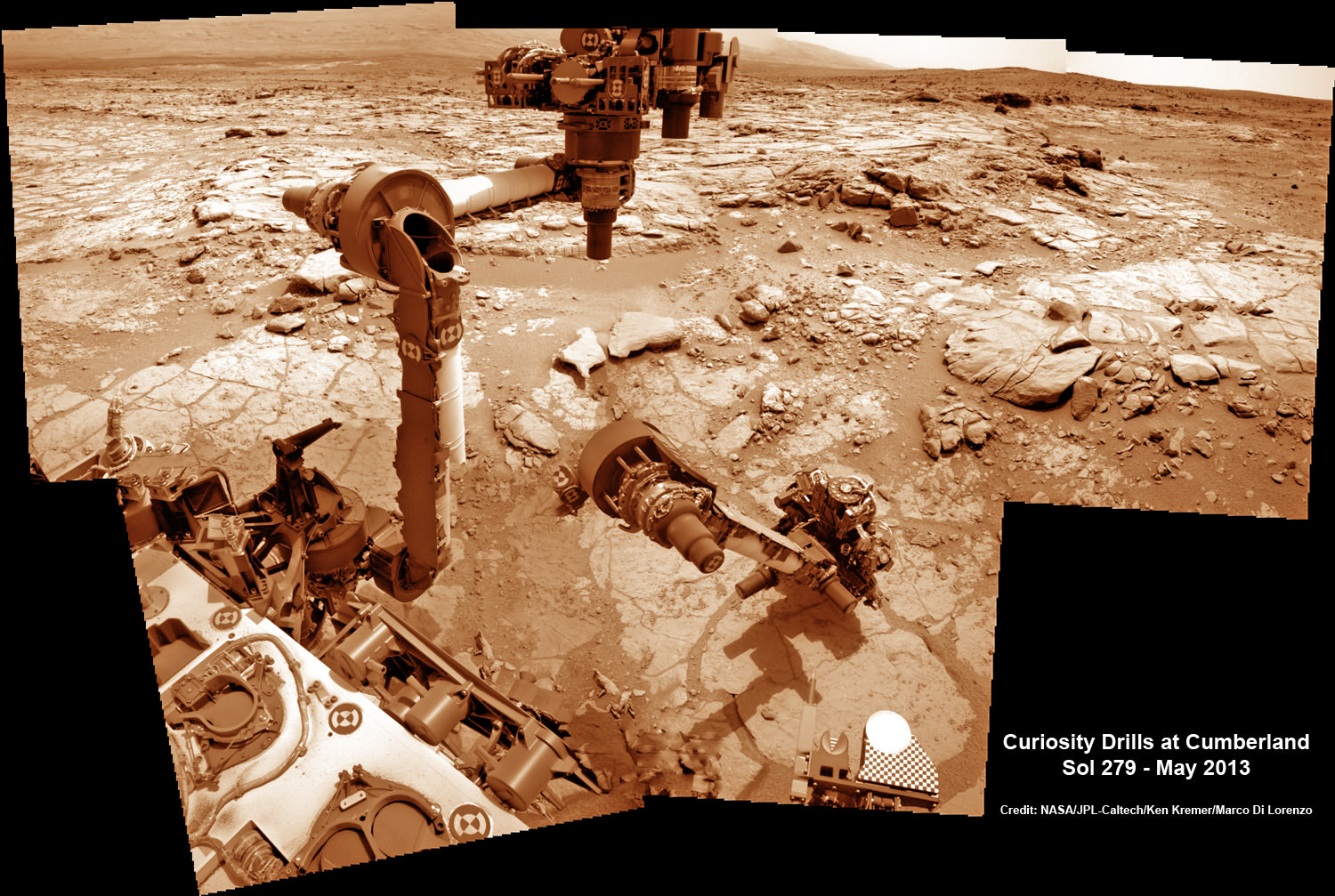
Meanwhile on the opposite side of Mars, Opportunity’s younger sister rover Curiosity is trekking towards gigantic Mount Sharp and just discovered water altered pebbles at the intriguing ‘Darwin’ outcrop.
And NASA is in the final stages of processing of MAVEN, the agencies next orbiter, scheduled to blast off from Cape Canaveral on Nov.18 – see my upcoming up close article.
…………….
Learn more about Curiosity, Mars rovers, MAVEN, Orion, Cygnus, Antares, LADEE and more at Ken’s upcoming presentations
Oct 3: “Curiosity, MAVEN and the Search for Life on Mars – (3-D)”, STAR Astronomy Club, Brookdale Community College & Monmouth Museum, Lincroft, NJ, 8 PM
Oct 8: NASA’s Historic LADEE Lunar & Antares/Cygnus ISS Rocket Launches from Virginia”; Princeton University, Amateur Astronomers Assoc of Princeton (AAAP), Princeton, NJ, 8 PM