NASA astronaut Kate Rubins takes Apollo 17 Lunar Module Pilot Harrison “Jack” Schmitt on a ride on NASA’s LTV rover prototype at Johnson Space Center in Houston. NASA is building the prototype and has selected three other companies to provide the prototype with capabilities for use on the lunar surface. Image Credit: NASA/James Blair
In the summer of ’69, Apollo 11 delivered humans to the surface of the Moon for the first time. Neil Armstrong and Buzz Aldrin spent just over two hours exploring the area near their landing site on foot. Only during Apollo 15, 16, and 17 did astronauts have a vehicle to move around in.
Artemis astronauts on the Moon will have access to a vehicle right away, and NASA is starting to test a prototype.
HEXEL modules snap together for a large-stroke muscle and a multi-modal array. Credit: Zachary Yoder / MPI-IS Ellen Rumley / MPI-IS
Researchers have developed a set of hexagon-shaped robotic components that can be snapped together into larger and larger structures. Each one of the component hexagons is made of rigid plates that serve as its exoskeleton. Driven by electricity, the plates can change their shape, shifting from long and narrow to wide and flat at high speed. The combined structures are capable of jumping four times their own body height, then can shape-shift to roll extremely fast, or use multimodal actuation to crawl through confined spaces.
The Moon is sure to be a hotspot of economic activity as human commercial endeavors start to expand into space. Not only is it a ball of resources with a relatively small gravity well, but it also happens to be our nearest neighbor. But to unlock that potential, companies will have to build up an infrastructure that will allow for the exploitation of those resources. Enter Quantum Space, a new start-up from a group of heavy-hitting space experts looking to help make that potential a reality – by building a robotic spaceport around the moon.
The Canadarm 2 with the robotic hand Dextre attached riding shotgun on the International Space Station. Image Credit: NASA
Check out this image of the Canadian Space Agency’s (CSA) Canadarm2 on the International Space Station. The CSA’s Dextre is attached to one end of the arm. The Canadarm2 played a vital role in assembling the ISS, while Dextre helps maintain the ISS, freeing astronauts from routine yet dangerous spacewalks, and allowing them to focus on science.
A prototype of the transforming robot Shapeshifter is tested in the robotics yard at NASA's Jet Propulsion Laboratory. Image Credit: NASA/JPL-Caltech
When it comes to space exploration, it’s robots that do most of the work. That trend will continue as we send missions onto the surfaces of worlds further and further into the Solar System. But for robots to be effective in the challenging environments we need to explore—like Saturn’s moon Titan—we need more capable robots.
A new robot NASA is developing could be the next step in robotic exploration.
The climbing robot LEMUR rests after scaling a cliff in Death Valley, California. The robot uses special gripping technology that has helped lead to a series of new, off-roading robots that can explore other worlds.Credit: NASA/JPL-Caltech
NASA has pioneered the development of all kinds of robots and robotic systems. Beyond its0 orbiters and satellites, which have been exploring the planets and bodies of the Solar System for decades, there’s also the growing army of landers and rovers that have been exploring planetary surfaces. Aboard the ISS, they even have floating robots (like CIMON) and humanoid robot helpers – a la Robonaut and Robonaut 2.
Looking to the future, NASA hopes to build robots that can do even more. While the current generation of rovers can drive across the plains and craters of Mars, what if they could explore cliffs, polar ice caps and other hard-to-reach places? That is the purpose behind the Limbed Excursion Mechanical Utility Robot (LEMUR) that is currently being developed by engineers at NASA’s Jet Propulsion Laboratory.
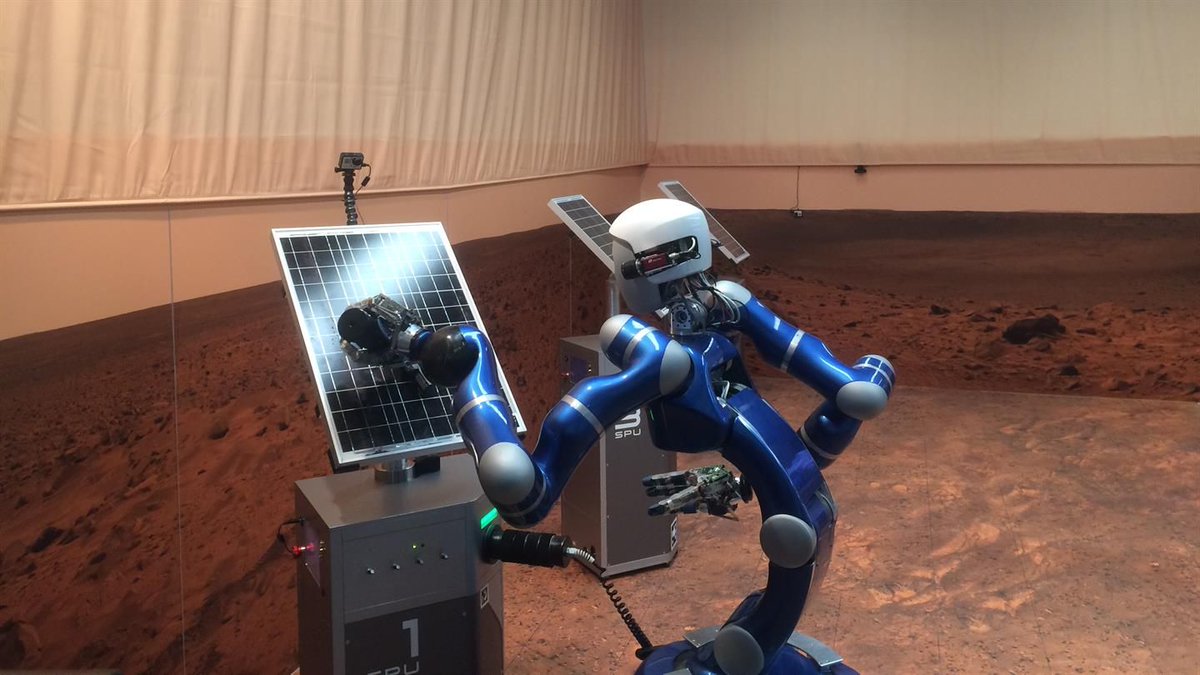
The artificially intelligent robot Justin cleans the solar panels in the simulated Martian landscape after being instructed to do so by American astronaut Scott Tingle aboard the ISS. Image: (DLR) German Aerospace Center (CC-BY 3.0)
If something called “Project METERON” sounds to you like a sinister project involving astronauts, robots, the International Space Station, and artificial intelligence, I don’t blame you. Because that’s what it is (except for the sinister part.) In fact, the Meteron Project (Multi-Purpose End-to-End Robotic Operation Network) is not sinister at all, but a friendly collaboration between the European Space Agency (ESA) and the German Aerospace Center (DLR.)
The idea behind the project is to place an artificially intelligent robot here on Earth under the direct control of an astronaut 400 km above the Earth, and to get the two to work together.
“Artificial intelligence allows the robot to perform many tasks independently, making us less susceptible to communication delays that would make continuous control more difficult at such a great distance.” – Neil Lii, DLR Project Manager.
On March 2nd, engineers at the DLR Institute of Robotics and Mechatronics set up the robot called Justin in a simulated Martian environment. Justin was given a simulated task to carry out, with as few instructions as necessary. The maintenance of solar panels was the chosen task, since they’re common on landers and rovers, and since Mars can get kind of dusty.
Justin is a pretty cool looking robot. Image: (DLR) German Aerospace Center (CC-BY 3.0)
The first test of the METERON Project was done in August. But this latest test was more demanding for both the robot and the astronaut issuing the commands. The pair had worked together before, but since then, Justin was programmed with more abstract commands that the operator could choose from.
American astronaut Scott Tingle issued commands to Justin from a tablet aboard the ISS, and the same tablet also displayed what Justin was seeing. The human-robot team had practiced together before, but this test was designed to push the pair into more challenging tasks. Tingle had no advance knowledge of the tasks in the test, and he also had no advance knowledge of Justin’s new capabilities. On-board the ISS, Tingle quickly realized that the panels in the simulation down here were dusty. They were also not pointed in the optimal direction.
This was a new situation for Tingle and for Justin, and Tingle had to choose from a range of commands on the tablet. The team on the ground monitored his choices. The level of complexity meant that Justin couldn’t just perform the task and report it completed, it meant that Tingle and the robot also had to estimate how clean the panels were after being cleaned.
“Our team closely observed how the astronaut accomplished these tasks, without being aware of these problems in advance and without any knowledge of the robot’s new capabilities,” says DLR engineer Daniel Leidner.
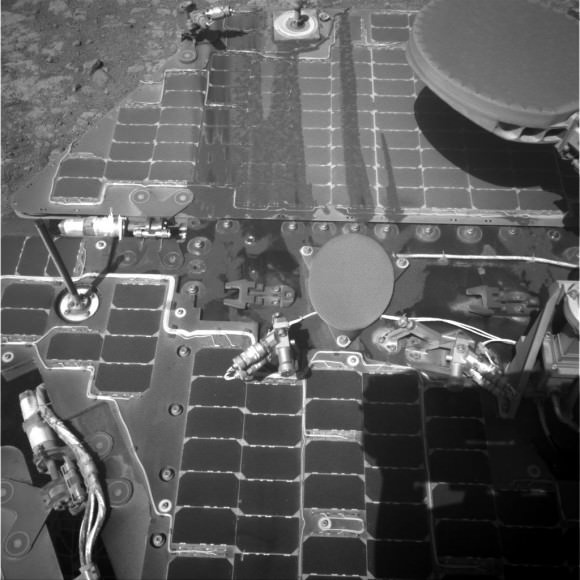
Streaks of dust or sand on NASA’s Mars rover Opportunity show what can happen to solar panels on the red planet. For any more permanent structures that we may put on Mars, an artificially intelligent maintenance robot under the control of an astronaut in orbit could be the perfect solution to the maintenance of solar panels. Credits: NASA/JPL-Caltech
The next test will take place in Summer 2018 and will push the system even further. Justin will have an even more complex task before him, in this case selecting a component on behalf of the astronaut and installing it on the solar panels. The German ESA astronaut Alexander Gerst will be the operator.
If the whole point of this is not immediately clear to you, think Mars exploration. We have rovers and landers working on the surface of Mars to study the planet in increasing detail. And one day, humans will visit the planet. But right now, we’re restricted to surface craft being controlled from Earth.
What METERON and other endeavours like it are doing, is developing robots that can do our work for us. But they’ll be smart robots that don’t need to be told every little thing. They are just given a task and they go about doing it. And the humans issuing the commands could be in orbit around Mars, rather than being exposed to all the risks on the surface.
“Artificial intelligence allows the robot to perform many tasks independently, making us less susceptible to communication delays that would make continuous control more difficult at such a great distance,” explained Neil Lii, DLR Project Manager. “And we also reduce the workload of the astronaut, who can transfer tasks to the robot.” To do this, however, astronauts and robots must cooperate seamlessly and also complement one another.
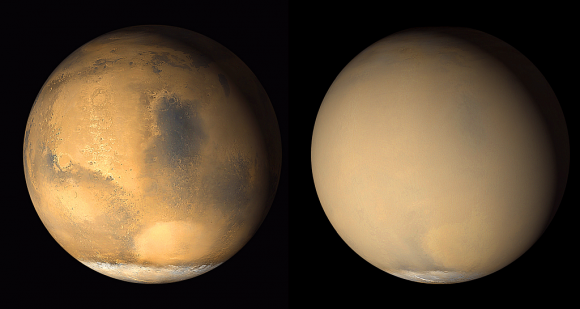
These two images from the camera on NASA’s Mars Global Surveyor show the effect that a global dust storm has on Mars. On the left is a normal view of Mars, on the right is Mars obscured by the haze from a dust storm. Image: NASA/JPL/MSSS
That’s why these tests are important. Getting the astronaut and the robot to perform well together is critical.
“This is a significant step closer to a manned planetary mission with robotic support,” says Alin Albu-Schäffer, head of the DLR Institute of Robotics and Mechatronics. It’s expensive and risky to maintain a human presence on the surface of Mars. Why risk human life to perform tasks like cleaning solar panels?
“The astronaut would therefore not be exposed to the risk of landing, and we could use more robotic assistants to build and maintain infrastructure, for example, with limited human resources.” In this scenario, the robot would no longer simply be the extended arm of the astronaut: “It would be more like a partner on the ground.”
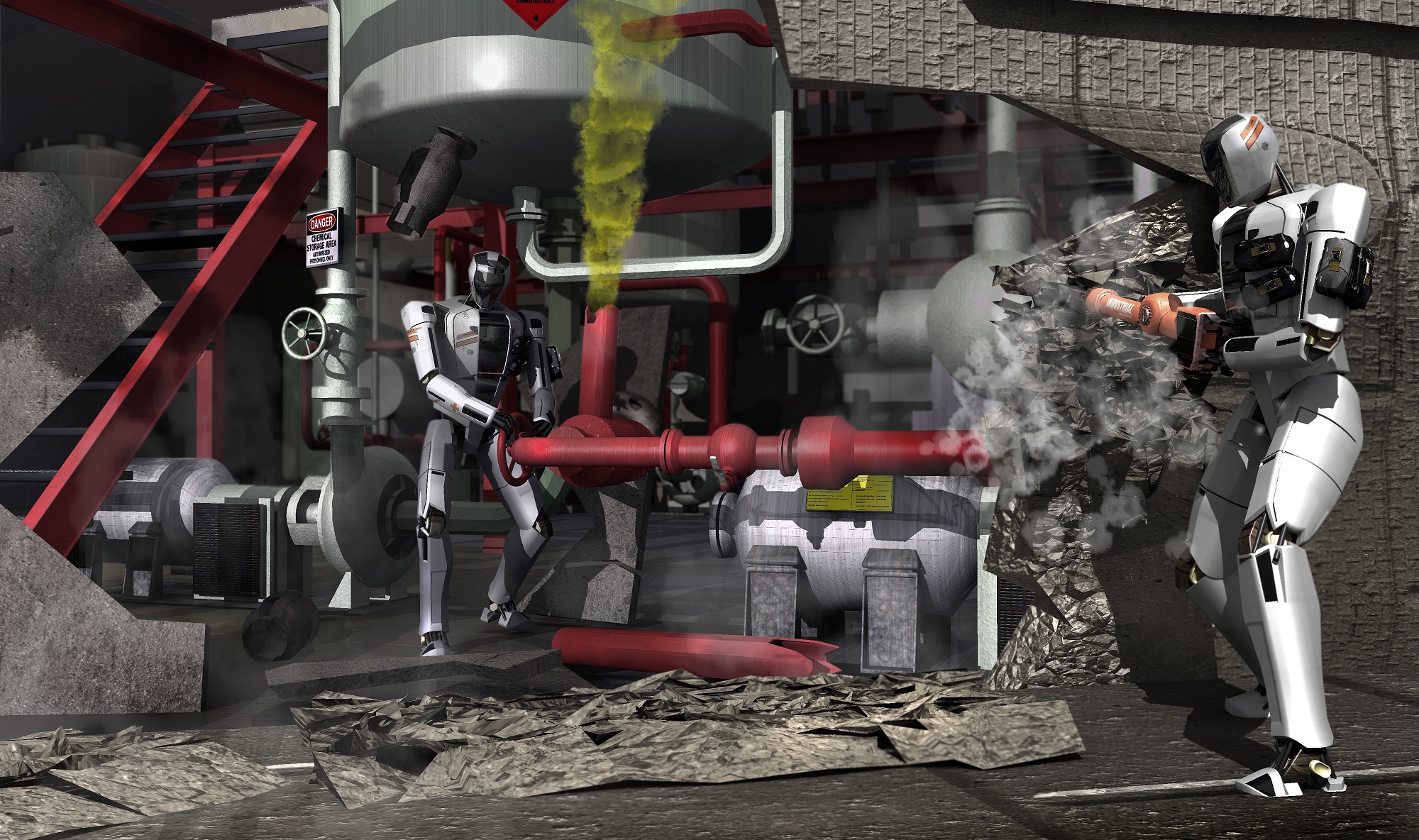
NASA's R5 "Valkyrie" robot may become a regular part of future crewed missions to Mars and beyond. Credit: NASA/B. Stafford/J. Blair/R. Geeseman
For over a decade, robots have been exploring Mars in advance of the crewed missions that are being planned for the coming decades. And when it comes time for astronauts to set foot on the Red Planet, they will be looking for robots to help them with some of the legwork. After all, exploring Mars is tough, laborious, and dangerous work, so some robotic assistance will probably be necessary.
For this reason, back in November of 2015, NASA gave the Massachusetts Institute of Technology one of their R5 “Valkyrie” humanoid robots. Since that time, MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) has been developing special algorithms that will allow these robots to help out during future missions to Mars and beyond.
These efforts are being led Professor Russ Tedrake, an electrical engineer and computer programmer who helped program the Atlas robot to take part in the 2015 DARPA Robotics Challenge. Together with members of an advanced independent research group – known as the Super Undergraduate Research Opportunities Program (SuperUROP) – he is getting this R5 robot ready for NASA’s Space Robotics Challenge.
The DARPA Robotics Challenge (DRC) sought to inspire the creation of robots that could perform human tasks; in that case, for the sake of disaster relief. Credit: DARPA
As part of NASA’s Centennial Challenges Program, and with a prize purse of $1 million, this competition aims to push the boundaries of what robots are capable of in the realm of space exploration. In addition to MIT, Northeastern University and the University of Edinburgh have been tasked with programming an R5 to complete tasks normally handled by astronauts.
Ultimately, the robots will be tested in a simulated environment and judged based on their ability to complete three tasks. These include aligning a communications array, repairing a broken solar array, and identifying and repairing a habitat leak. There will also be a qualifying round where teams will be tasked with demonstrating autonomous tracking abilities (which will have to be completed in order to move towards the main round).
Naturally, this presents quite a few challenges. NASA designed the R5 robot to be capable of performing human tasks and move like a human being as much as possible, which necessitated a body with 28 torque-controlled joints. However, getting those joints to work together to perform mission-related work and operate independently is a bit of a challenge.
In short, the robot is not like other robotic missions – such as the Opportunity or Curiosity rovers. Instead of having a human being pushing levers to get them to move about and collect samples, the R5 will be tasked with things like opening airlock hatches, attaching and removing power cables, repairing equipment, and retrieving samples all on its own. And of course, if it takes a spill and falls down, it will have to be able to get up on its own.
NASA’s Space Robotics Challenge seeks to foster the development of robots that can help human astronauts during future missions, like to Mars. Credit: NASA/STMD
With the help of the special algorithms being generated by Tedrake and his colleagues – as well as other teams competing in this challenge – robots could play an important role in future missions. This could involve robots selecting landing sites for astronaut crews, setting up habitats in advance of crews arriving, and even conducting preliminary research on celestial bodies.
In addition, robots could take the place of crews on long-distance missions (such as Europa). Instead of sending a crew that would require months of food and supplies, a robot crew could be dispatched to the Jovian moon to collect ice samples, explore the surface, and interface with drones being sent to explore the interior ocean. And if the mission failed, there would be no grieving families (just grieving robotics teams).
And now to address the elephant in the room. The idea of sending robot explorers on space missions to help astronauts (or even replace them) is sure to make some people out there nervous. But for those who fear that this might bring one step closer to a robot revolution, rest assured that the machines are nowhere near where they’d need to be to go all “Judgement Day” on us just yet.
Long before they can launch nuclear weapons, pick up laser guns and stalk us through a post-apocalyptic landscape, or start upgrading themselves to look (and feel) human, robots will first need to master the simple tasks of walking upright and holding a screwdriver.
Still, if any of the robots end up having creepy red visor eyes (or saying things like “by your command”), we might want to consider including the Three Laws of Robotics in their programming. It’s never too soon to make sure they can’t turn on humanity!
Registration for the Space Robotics Challenge opened in August, 2016. The qualifying round, which began in mid-October, will run until mid-December. Finalists of that round will be announced in January, with the final virtual competition taking place in June 2017. The winning team will be awarded $500,000 over a two year period from NASA’s Space Technology Mission Directive.
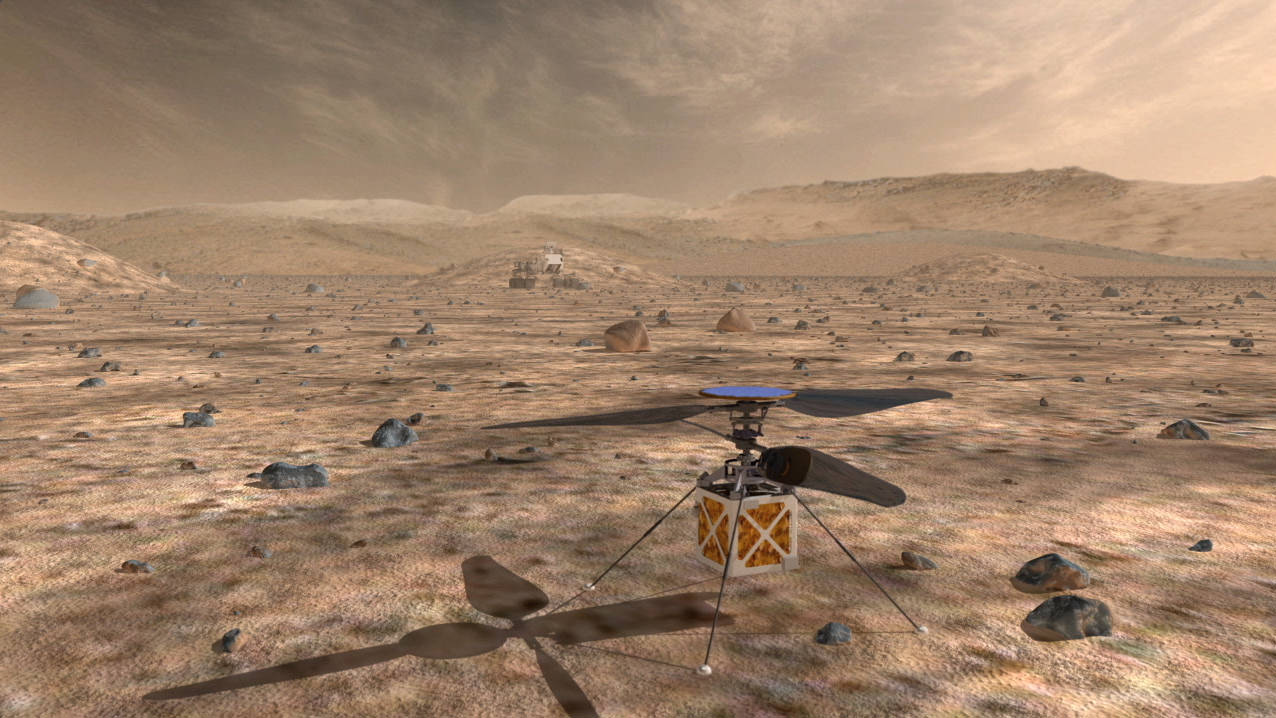
A small drone helicopter currently being developed by engineers at NASA's Jet Propulsion Laboratory could serve as a reconnaissance scout for future Mars rovers, greatly enhancing their effectiveness. Credit NASA JPL
NASA’s Jet Propulsion Laboratory recently announced that it is developing a small drone helicopter to scout the way for future Mars rovers. Why would Mars rovers need such a robotic guide? The answer is that driving on Mars is really hard.
Here on Earth, robots exploring volcanic rims, or assisting rescuers, can be driven by remote control, with a joystick. This is because radio signals reach the robot from its control center almost instantly. Driving on the moon isn’t much harder. Radio signals traveling at the speed of light take about two and half seconds to make the round trip to the moon and back. This delay isn’t long enough to seriously interfere with remote control driving. In the 1970’s Soviet controllers drove the Lunokhod moon rovers this way, successfully exploring more than 40 km of lunar terrain.
Driving on Mars is much harder, because it is so much further away. Depending on its position with respect to Earth, signals can take between 8 and 42 minutes for the round trip. Pre-programmed instructions must be sent to the rover, which it then executes on its own. Each Martian drive takes hours of careful planning. Stereo images taken by the rover’s navigation cameras are carefully scrutinized by engineers. Images from spacecraft orbiting Mars sometimes provide additional information.
A rover can be programmed either to simply execute a list of driving commands sent from Earth, or it can use images taken by its navigation cameras and processed by its on-board computers to measure speed and detect obstacles or hazards by itself. It can even plot its own safe path to a specified goal. Drives based on instructions from the ground are the fastest.
The Mars Exploration Rovers Spirit and Opportunity could drive up to 124 meters in an hour this way. This corresponds to about the length of an American football field. But this mode was also the least safe.
When the rover actively guides itself with its cameras, progress is safer, but much slower because of all the image processing needed. It may progress by as little as 10 meters an hour, which is about the distance from the goal line to the 10 yard line on an American football field. This method must be used whenever the rover doesn’t have a clear view of the route ahead, which is often the case due to rough and hilly terrain.
As of early 2015, the farthest Curiosity has driven in a single day is 144 meters. Opportunity’s longest daily drive was 224 meters, a distance the length of two American football fields.
If ground controllers could get a better view of the path ahead, they could devise instructions allowing a future rover to safely drive much further in a day.
That’s where the idea of a drone helicopter comes in. The helicopter could fly out ahead of the rover every day. Images made from its aerial vantage point would be invaluable to ground controllers for identifying points of scientific interest, and planning driving routes to get there.
Flying a helicopter on Mars poses special challenges. One advantage is that Martian gravity is only 38% as strong as that of Earth, so that the helicopter wouldn’t need to generate as much lift as one of the same mass on Earth. A helicopter’s propeller blades generate lift by pushing air downward. This is harder to do on Mars than on Earth, because the Martian atmosphere is on hundred times thinner. To displace enough air, the propeller blades would need to spin very quickly, or to be very large.
The copter must be capable of flying on its own, using prior instructions, maintaining stable flight along a pre-specified route. It must land and take off repeatedly in rocky Martian terrain. Finally it must be capable of surviving the harsh conditions of Mars, where the temperature plummets to 100 degrees Fahrenheit or lower every night.
The JPL engineers designed a copter with a mass of 1 kilogram; a tiny fraction of the 900 kg mass of the Curiosity rover. Its propeller blades span 1.1 meters from blade tip to blade tip, and are capable of spinning at 3400 rotations per minute. The body is about the size of a tissue box.
The copter is solar powered, with a disk of solar cells gathering enough power every day to power a flight of two to three minutes and to heat the vehicle at night. It can fly about half a kilometer in that time, gathering images for transmission to ground control as it goes. Engineers expect that the reconnaissance that the drone copter gathers will be invaluable in planning a rover’s drives, tripling the distance that can be traveled in a day.
References and further reading:
Thanks to Mark Maimone of NASA Jet Propulsion Laboratory for information about the daily driving distances of Curiosity and Opportunity.
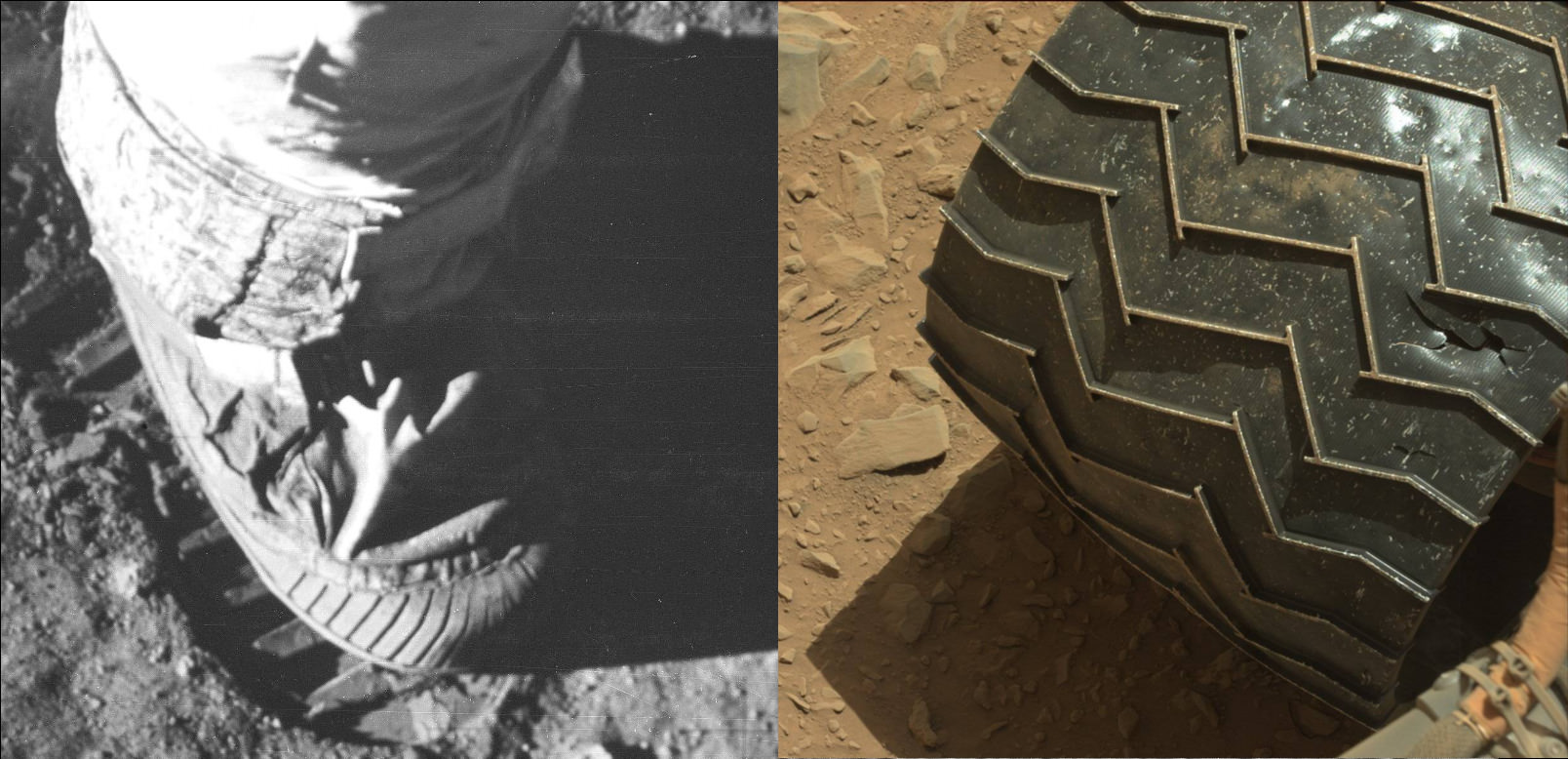
Over forty years separate the step made by an Apollo astronaut and the cleated wheel of the Curiosity Rover on Mars. (Photo Credits: NASA)
With robotic spacecraft, we have explored, discovered and expanded our understanding of the Solar System and the Universe at large. Our five senses have long since reached their limits and cannot reveal the presence of new objects or properties without the assistance of extraordinary sensors and optics. Data is returned and is transformed into a format that humans can interpret.
Humans remain confined to low-Earth orbit and forty-three years have passed since humans last escaped the bonds of Earth’s gravity. NASA’s budget is divided between human endeavors and robotic and each year there is a struggle to find balance between development of software and hardware to launch humans or carry robotic surrogates. Year after year, humans continue to advance robotic capabilities and artificial intelligence (A.I.), and with each passing year, it becomes less clear how we will fit ourselves into the future exploration of the Solar System and beyond.
On July 21, 1969, Neil Armstrong photographed Buzz Aldrin on the Moon. The Apollo 13 astronauts hold the record as having been the most distant humans from Earth – 249,205 miles. Since December 1972, 42 years, the furthest humans have traveled from Earth is 347 miles (equivalent to SF to LA) – to service the Hubble space telescope. The Mars Science Laboratory, Curiosity Rover resides at least 34 million miles and as far as 249 million from Earth, while the Voyager 1 probe is 12,141,887,500 miles from Earth. Having traveled billions of miles and peered into billions of light years of space, NASA robotic vehicles have rewritten astronomical textbooks.(Photo Credits: NASA)
Is it a race in which we are unwittingly partaking that places us against our inventions? And like the aftermath of the Kasparov versus Deep Blue chess match, are we destined to accept a segregation as necessary? Allow robotics, with or without A.I., to do what they do best – explore space and other worlds?
In May 1997, Garry Kasparov accepted a rematch with Deep Blue and lost. In the 17 years since the defeat, super-computing power has increased by a factor of 50,000 (FLOPS). Furthermore, Chess software has steadily improved. Advances in space robotics have not relied on sheer computing performance but rather from steady advances in reliability, memory storage, nanotechnology, material science, software and more. (Photo Credit: Reuters)
Should we continue to find new ways and better ways to plug ourselves into our surrogates and appreciate with greater detail what they sense and touch? Consider how naturally our children engross themselves in games and virtual reality and how difficult it is to separate them from the technology. Or is this just a prelude and are we all antecedents of future Captain Kirks and Jean Luc Picards?
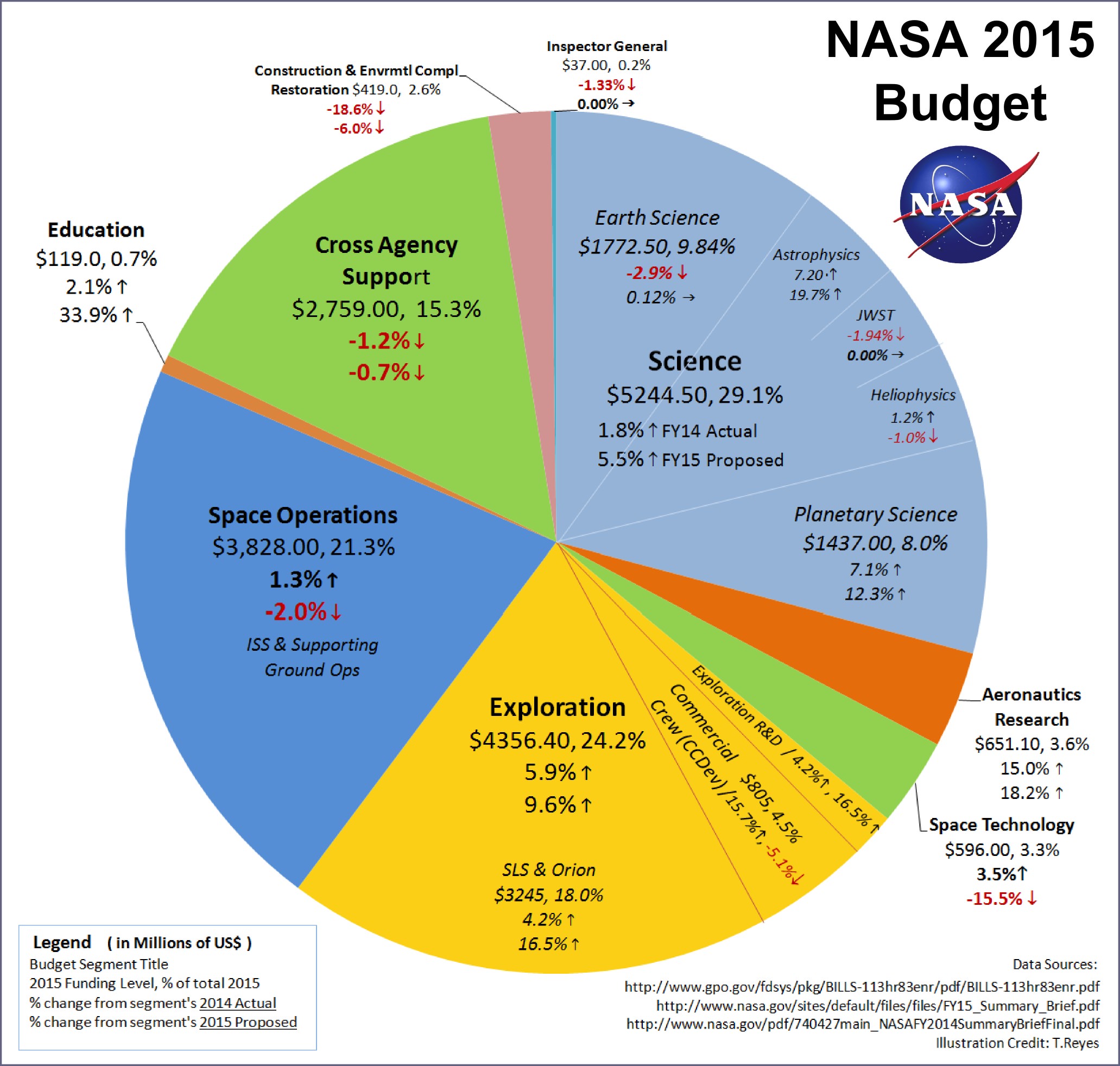
The NASA 2015 budget passed on December 13, 2014, as part of the Continuing Resolution & Omnibus Bill (HR 83). Each chart segment lists the allocated funds, the percent of the total budget, the percent change relative to NASA’s 2014 budget and percent change relative to the 2015 White House budget request. (Credit: T.Reyes)
Approximately 55% of the NASA budget is in the realm of human spaceflight (HSF). This includes specific funds for Orion and SLS and half measures of supporting segments of the NASA agency, such as Cross-Agency Support, Construction and Maintenance. In contrast, appropriations for robotic missions – project development, operations, R&D – represent 39% of the budget.
The appropriation of funds has always favored human spaceflight, primarily because HSF requires costlier, heavier and more complex systems to maintain humans in the hostile environment of space. And while NASA budgets are not nearly weighted 2-to-1 in favor of human spaceflight, few would contest that the return on investment (ROI) is over 2-to-1 in favor of robotic driven exploration of space. And many would scoff at this ratio and counter that 3-to-1 or 4-to-1 is closer to the advantage robots have over humans.
For NASA enthusiasts, NASA Administrator Charles Bolden and Texas representative Lamar Smith, chairman of the Committee on Science, Space and Technology in the 113th Congress, have raised CSPAN coverage to moments of high drama. The lines of questioning and decision making define the line in the sand between Capital Hill and the White House’s vision of NASA’s future. (Credit: CSPAN,Getty Images)
Politics play a significantly bigger role in the choice of appropriations to HSF compared to robotic missions. The latter is distributed among smaller budget projects and operations and HSF has always involved large expensive programs lasting decades. The big programs attract the interest of public officials wanting to bring capital and jobs to their districts or states.
NASA appropriations are complicated further by a rift between the White House and Capitol Hill along party lines. The Democrat-controlled White House has favored robotics and the use of private enterprise to advance NASA while Republicans on the Hill have supported the big human spaceflight projects; further complications are due to political divisions over the issue of Climate Change. How the two parties treat NASA is the opposite to, at least, how the public perceives the party platforms – smaller government or more social programs, less spending and supporting private enterprise. This tug of war is clearly seen in the NASA budget pie chart.
The House reduced the White House request for NASA Space Technology by 15% while increasing the funds for Orion and SLS by 16%. Space Technology represents funds that NASA would use to develop the Asteroid Redirect Mission (ARM), which the Obama administration favors as a foundation for the first use of SLS as part of a human mission to an asteroid. In contrast, the House appropriated $100 million to the Europa mission concept. Due to the delays of Orion and SLS development and anemic funding of ARM, the first use of SLS could be to send a probe to Europa.
While HSF appropriations for Space Ops & Exploration (effectively HSF) increased ~6% – $300 million, NASA Science gained ~2% – $100 million over the 2014 appropriations; ultimately set by Capitol Hill legislators. The Planetary Society, which is the Science Mission Directorate’s (SMD) staunchest supporter, has expressed satisfaction that the Planetary Science budget has nearly reached their recommended $1.5 billion. However, the increase is delivered with the requirement that $100 million shall be used for Europa concept development and is also in contrast to cutbacks in other segments of the SMD budget.
Note also that NASA Education and Public Outreach (EPO) received a significant boost from Republican controlled Capital Hill. In addition to the specific funding – a 2% increase over 2014 and 34% over the White House request, there is $42 million given specifically to the Science Mission Directorate (SMD) for EPO. The Obama Adminstration has attempted to reduce NASA EPO in favor of a consolidated government approach to improve effectiveness and reduce government.
The drive to explore beyond Earth’s orbit and set foot on new worlds is not just a question of finances. In retrospect, it was not finances at all and our remaining shackles to Earth was a choice of vision. Today, politicians and administrators cannot proclaim ‘Let’s do it again! Let’s make a better Shuttle or a better Space Station.’ There is no choice but to go beyond Earth orbit, but where?
From a Soyuz capsule, Space Shuttle Endeavour, during Expedition 27, is docked to the ISS, 220 miles above the Earth. Before even Apollo 11 landed on the Moon, plans were underway for the next generation spacecraft that would lower the cost of human spaceflight and make trips routine. Forty years have passed since the last Saturn rocket launch and four years since the last Shuttle. Legislators on Capital Hill appear ready to accept a replacement for the Shuttle that, while inherently safer, will cost $600 million per launch excluding the cost of the payload. The Space Launch System (SLS) is destined to serve both human spaceflight and robotic missions. (Photo Credit: NASA)
While the International Space Station program, led by NASA, now maintains a continued human presence in outer space, more people ask the question, ‘why aren’t we there yet?’ Why haven’t we stepped upon Mars or the Moon again, or anything other than Earth or floating in the void of low-Earth orbit. The answer now resides in museums and in the habitat orbiting the Earth every 90 minutes.
The retired Space Shuttle program and the International Space Station represent the funds expended on human spaceflight over the last 40 years, which is equivalent to the funds and the time necessary to send humans to Mars. Some would argue that the funds and time expended could have meant multiple human missions to Mars and maybe even a permanent presence. But the American human spaceflight program chose a less costly path, one more achievable – staying close to home.
Mars, the forbidden planet? No. The Amazing planet? Yes. Foreboding? Perhaps. Radiation exposure, electronic or mechanical mishaps and years of zero or low gravity are the perils that the first Mars explorers face. But humanity’s vision of landing on Mars remains just illustrations from the ’50s and ’60s. A select few – Mars Rover navigators – have experienced the surface of Mars in virtual reality. (Photo Credits: Franklin Dixon, June 12, 1964 (left), MGM (right))
Ultimately, the goal is Mars. Administrators at NASA and others have become comfortable with this proclamation. However, some would say that it is treated more as a resignation. Presidents have been defining the objectives of human spaceflight and then redefining them. The Moon, Lagrangian Points or asteroids as waypoints to eventually land humans on Mars. Partial plans and roadmaps have been constructed by NASA and now politicians have mandated a roadmap. And politicians forced continuation of development of a big rocket; one which needs a clear path to justify its cost to taxpayers. One does need a big rocket to get anywhere beyond low-Earth orbit. However, a cancellation of the Constellation program – to build the replacement for the Shuttle and a new human-rated spacecraft – has meant delays and even more cost overruns.
During the ten years that have transpired to replace the Space Shuttle, with at least five more years remaining, events beyond the control of NASA and the federal government have taken place. Private enterprise is developing several new approaches to lofting payloads to Earth orbit and beyond. More countries have taken on the challenge. Spearheading this activity, independent of NASA or Washington plans, has been Space Exploration Technologies Corporation (SpaceX).
The launch of a SpaceX Falcon 9 is scheduled for Tuesday, December 5, 2015 and will include the return to Earth of the 1st stage Falcon core. Previous attempts landed the core into the Atlantic while this latest attempt will use a barge to attempt a full recovery. The successful soft landing and reuse of Falcon cores will be a major milestone in the history of spaceflight. (Photo Credits: SpaceX)
SpaceX’s Falcon 9 and soon to be Falcon Heavy represent alternatives to what was originally envisioned in the Constellation program with Ares I and Ares V. Falcon Heavy will not have the capability of an Ares V but at roughly $100 million per flight versus $600 million per flight for what Ares V has become – the Space Launch System (SLS) – there are those that would argue that ‘time is up.’ NASA has taken too long and the cost of SLS is not justifiable now that private enterprise has developed something cheaper and done so faster. Is Falcon Nine and Heavy “better”, as in NASA administrator Dan Golden’s proclamation – ‘Faster, Better, Cheaper’? Is it better than SLS technology? Is it better simply because its cheaper for lifting each pound of payload? Is it better because it is arriving ready-to-use sooner than SLS?
Humans will always depend on robotic launch vehicles, capsules and habitats laden with technological wonders to make our spaceflight possible. However, once we step out beyond Earth orbit and onto other worlds, what shall we do? From Carl Sagan to Steve Squyres, NASA scientists have stated that a trained astronaut could do in just weeks what the Mars rovers have required years to accomplish. How long will this hold up and is it really true?
Man versus Machine? All missions whether robotic or human spaceflight benefit mankind but the question is raised: how will human boots fit into the exploration of the universe that robotics has made possible. (Photo Credits: NASA, Illustration – J.Schmidt)
Since Chess Champion Garry Kasparov was defeated by IBM’s Deep Blue, there have been 8 two-year periods representing the doubling of transistors in integrated circuits. This is a factor of 256. Arguably, computers have grown 100 times more powerful in the 17 years. However, robotics is not just electronics. It is the confluence of several technologies that have steadily developed over the 40 years that Shuttle technology stood still and at least 20 years that Space Station designs were locked into technological choices. Advances in material science, nano-technology, electro-optics, and software development are equally important.
While human decision making has been capable of spinning its wheels and then making poor choices and logistical errors, the development of robotics altogether is a juggernaut. While appropriations for human spaceflight have always surpassed robotics, advances in robotics have been driven by government investments across numerous agencies and by private enterprise. The noted futurist and inventor Ray Kurzweil who predicts the arrival of the Singularity by around 2045 (his arrival date is not exact) has emphasized that the surpassing of human intellect by machines is inevitable due to the “The Law of Accelerating Returns”. Technological development is a juggernaut.
In the same year that NASA was founded, 1958, the term Singularity was first used by mathematician John von Neumann to describe the arrival of artificial intelligence that surpasses humans.
Unknowingly, this is the foot race that NASA has been in since its creation. The mechanisms and electronics that facilitated landing men on the surface of the Moon never stopped advancing. And in that time span, human decisions and plans for NASA never stopped vacillating or stop locking existing technology into designs; suffering delays and cost overruns before launching humans to space.
David Hardy’s illustration of the Daedalus Project envisioned by the British Interplanetary Society – a spacecraft to travel to the nearest stars. Advances in artificial intelligence and robotics leads one to wonder who shall reside inside such vessels of the future – robotic surrogates or human beings or something in between. (Credit: D. Hardy)
So are we destined to arrive on Mars and roam its surface like retired geologists and biologists wandering in the desert with a poking stick or rock hammer? Have we wasted too much time and has the window passed in which human exploration can make discoveries that robotics cannot accomplish faster, better and cheaper? Will Mars just become an art colony where humans can experience new sunrises and setting moons? Or will we segregate ourselves from our robotic surrogates and appreciate our limited skills and go forth into the Universe? Or will we mind meld with robotics and master our own biology just moments after taking our first feeble steps beyond the Earth?
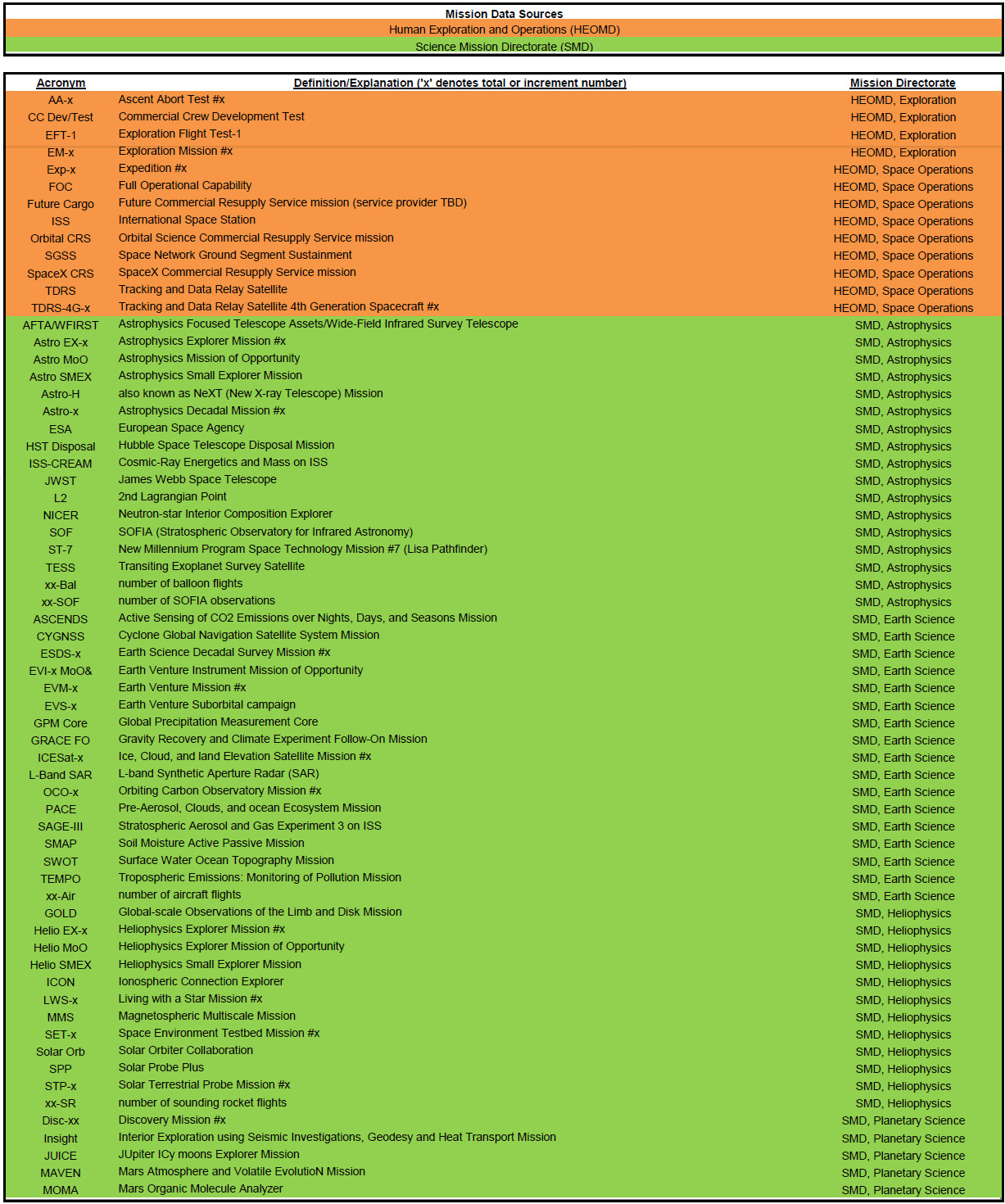
An excerpt of page 3 of NASA’s FY15 Agency Mission Planning Model (AMPM[alt]); a 20 year plan. This figure emphasizes the list of planned projects and missions for human spaceflight (HEOMD), orange, and the Science Mission Directorate (SMD), green, representing robotic development and missions. The lopsided list is indicative of the cost advantage of robotics over human spaceflight. The robotic missions will amount to hundreds of years of combined mission lifetime in comparison to the HEOMD missions that are still limited to months by individual astronauts in flight.(Credit: NASA)References: