A prototype of the transforming robot Shapeshifter is tested in the robotics yard at NASA's Jet Propulsion Laboratory. Image Credit: NASA/JPL-Caltech
When it comes to space exploration, it’s robots that do most of the work. That trend will continue as we send missions onto the surfaces of worlds further and further into the Solar System. But for robots to be effective in the challenging environments we need to explore—like Saturn’s moon Titan—we need more capable robots.
A new robot NASA is developing could be the next step in robotic exploration.
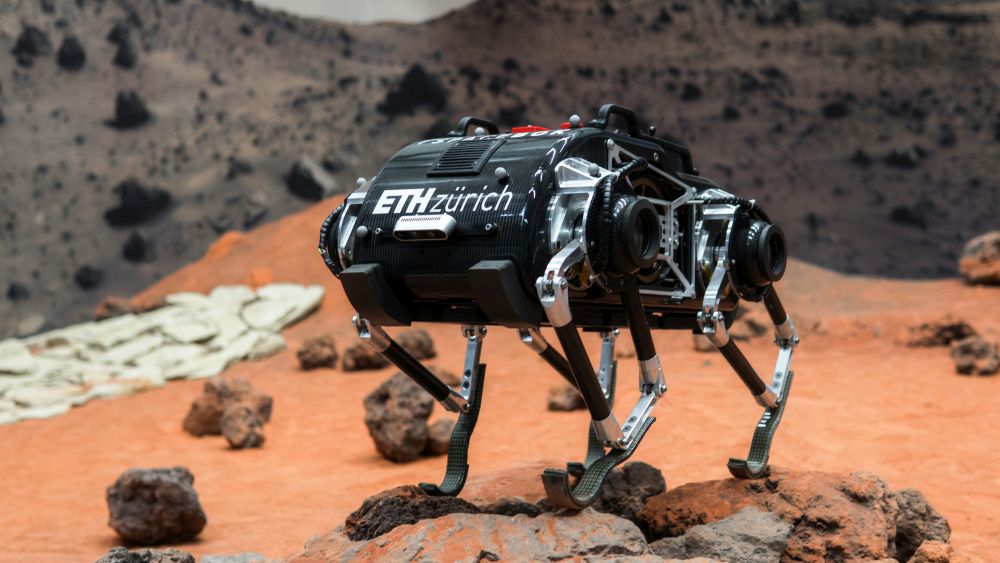
The SpaceBok is a hopping exploration robot being developed for use on low-gravity worlds. Image Credit: ESA
The ESA is helping a group of students from Zurich test and develop their hopping exploration robot. Called SpaceBok, the robot is designed to operate on low-gravity bodies like the Moon or asteroids. It’s based on the concept of ‘dynamic walking’, something that animals on Earth use.
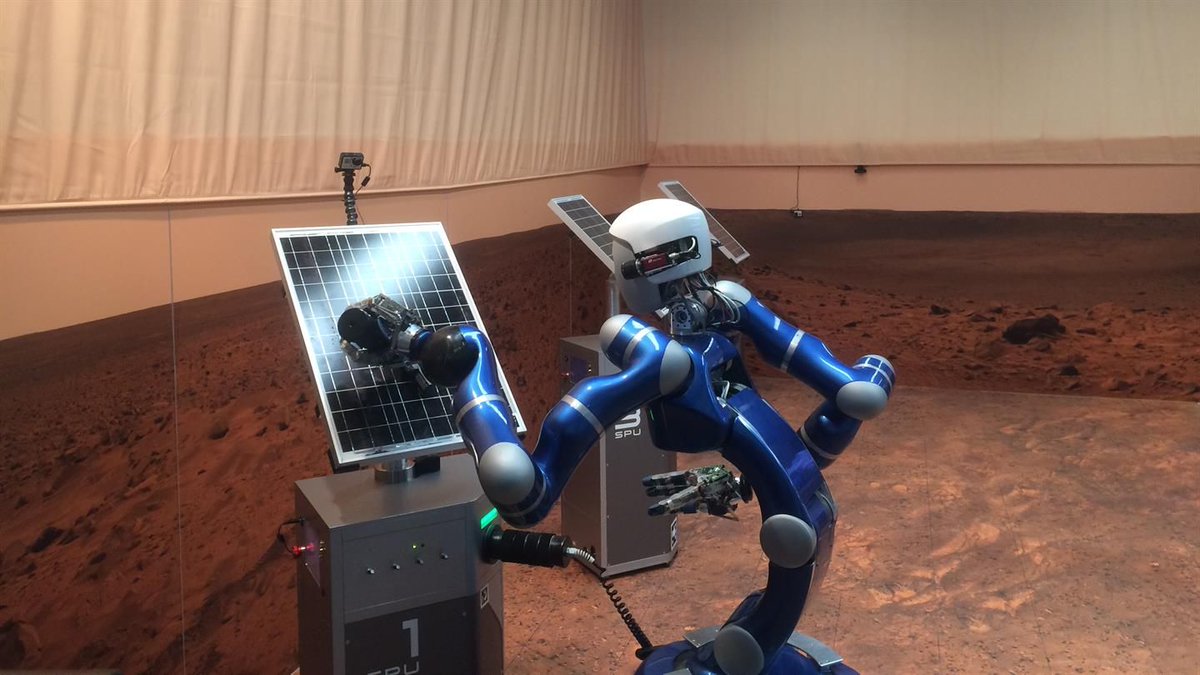
The artificially intelligent robot Justin cleans the solar panels in the simulated Martian landscape after being instructed to do so by American astronaut Scott Tingle aboard the ISS. Image: (DLR) German Aerospace Center (CC-BY 3.0)
If something called “Project METERON” sounds to you like a sinister project involving astronauts, robots, the International Space Station, and artificial intelligence, I don’t blame you. Because that’s what it is (except for the sinister part.) In fact, the Meteron Project (Multi-Purpose End-to-End Robotic Operation Network) is not sinister at all, but a friendly collaboration between the European Space Agency (ESA) and the German Aerospace Center (DLR.)
The idea behind the project is to place an artificially intelligent robot here on Earth under the direct control of an astronaut 400 km above the Earth, and to get the two to work together.
“Artificial intelligence allows the robot to perform many tasks independently, making us less susceptible to communication delays that would make continuous control more difficult at such a great distance.” – Neil Lii, DLR Project Manager.
On March 2nd, engineers at the DLR Institute of Robotics and Mechatronics set up the robot called Justin in a simulated Martian environment. Justin was given a simulated task to carry out, with as few instructions as necessary. The maintenance of solar panels was the chosen task, since they’re common on landers and rovers, and since Mars can get kind of dusty.
Justin is a pretty cool looking robot. Image: (DLR) German Aerospace Center (CC-BY 3.0)
The first test of the METERON Project was done in August. But this latest test was more demanding for both the robot and the astronaut issuing the commands. The pair had worked together before, but since then, Justin was programmed with more abstract commands that the operator could choose from.
American astronaut Scott Tingle issued commands to Justin from a tablet aboard the ISS, and the same tablet also displayed what Justin was seeing. The human-robot team had practiced together before, but this test was designed to push the pair into more challenging tasks. Tingle had no advance knowledge of the tasks in the test, and he also had no advance knowledge of Justin’s new capabilities. On-board the ISS, Tingle quickly realized that the panels in the simulation down here were dusty. They were also not pointed in the optimal direction.
This was a new situation for Tingle and for Justin, and Tingle had to choose from a range of commands on the tablet. The team on the ground monitored his choices. The level of complexity meant that Justin couldn’t just perform the task and report it completed, it meant that Tingle and the robot also had to estimate how clean the panels were after being cleaned.
“Our team closely observed how the astronaut accomplished these tasks, without being aware of these problems in advance and without any knowledge of the robot’s new capabilities,” says DLR engineer Daniel Leidner.
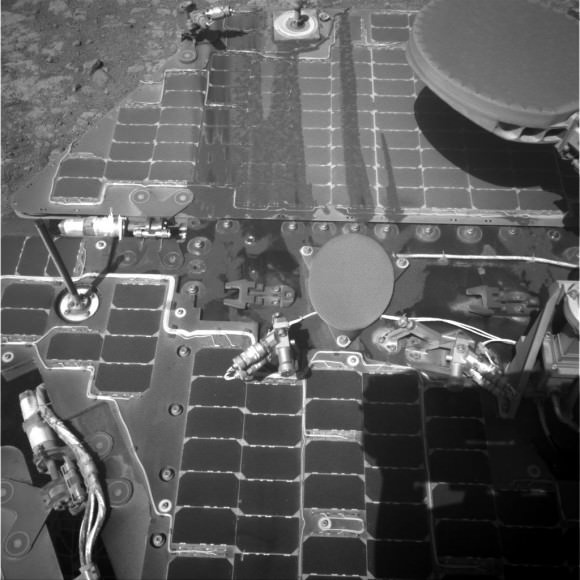
Streaks of dust or sand on NASA’s Mars rover Opportunity show what can happen to solar panels on the red planet. For any more permanent structures that we may put on Mars, an artificially intelligent maintenance robot under the control of an astronaut in orbit could be the perfect solution to the maintenance of solar panels. Credits: NASA/JPL-Caltech
The next test will take place in Summer 2018 and will push the system even further. Justin will have an even more complex task before him, in this case selecting a component on behalf of the astronaut and installing it on the solar panels. The German ESA astronaut Alexander Gerst will be the operator.
If the whole point of this is not immediately clear to you, think Mars exploration. We have rovers and landers working on the surface of Mars to study the planet in increasing detail. And one day, humans will visit the planet. But right now, we’re restricted to surface craft being controlled from Earth.
What METERON and other endeavours like it are doing, is developing robots that can do our work for us. But they’ll be smart robots that don’t need to be told every little thing. They are just given a task and they go about doing it. And the humans issuing the commands could be in orbit around Mars, rather than being exposed to all the risks on the surface.
“Artificial intelligence allows the robot to perform many tasks independently, making us less susceptible to communication delays that would make continuous control more difficult at such a great distance,” explained Neil Lii, DLR Project Manager. “And we also reduce the workload of the astronaut, who can transfer tasks to the robot.” To do this, however, astronauts and robots must cooperate seamlessly and also complement one another.
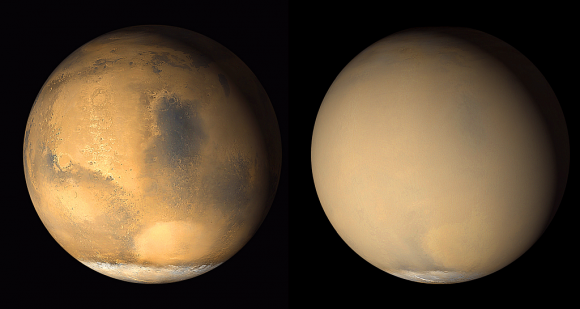
These two images from the camera on NASA’s Mars Global Surveyor show the effect that a global dust storm has on Mars. On the left is a normal view of Mars, on the right is Mars obscured by the haze from a dust storm. Image: NASA/JPL/MSSS
That’s why these tests are important. Getting the astronaut and the robot to perform well together is critical.
“This is a significant step closer to a manned planetary mission with robotic support,” says Alin Albu-Schäffer, head of the DLR Institute of Robotics and Mechatronics. It’s expensive and risky to maintain a human presence on the surface of Mars. Why risk human life to perform tasks like cleaning solar panels?
“The astronaut would therefore not be exposed to the risk of landing, and we could use more robotic assistants to build and maintain infrastructure, for example, with limited human resources.” In this scenario, the robot would no longer simply be the extended arm of the astronaut: “It would be more like a partner on the ground.”
Welcome, come in to the 480th Carnival of Space! The Carnival is a community of space science and astronomy writers and bloggers, who submit their best work each week for your benefit. I’m Susie Murph, part of the team at Universe Today and CosmoQuest. So now, on to this week’s stories! Continue reading “Carnival of Space #480”
Screengrab from the WildCat video from Boston Dynamics.
This is both wonderful and terrifying. A DARPA-funded four-legged robot named WildCat is being developed by a company called Boston Dynamics (tagline of “Changing Your Idea of What Robots Can Do”). They’ve previously developed a humanoid capable of walking across multiple terrains called Atlas, and the scarily-fast Cheetah which set a new land-speed record for legged robots. But the WildCat is a brand new robot created to run fast on all types of terrain, and so far its top speed has been about 16 mph on flat terrain using both bounding and galloping gaits.
The video, released yesterday, shows WildCat’s best performance so far. Don’t let the sound fool you — yes, it does sound like a weed-whacker. But as soon as it raises up off its haunches, you know you’re doomed.
I’ve been trying to figure out what sci-fi equivalent might describe it best: the Terminator’s pet? A lethal, non-fuzzy Daggit from Battlestar Galactica? An AT-AT Walker on speed?
@doug_ellison's contribution to the new 'Robot Shaming' Tumblr site.
Oh, those space robots. They don’t always do what we want them to do, but we love them anyway. If you need a fun diversion in your day, a new Tumblr site has arisen to call out the robots who have made mistakes. Called “Shaming Robots” it started innocently with an image posted of the engineering model of the Curiosity rover blaming the engineering Opportunity rover for messing up JPL’s Mars Yard. There’s now pages of shamed robots (both space and Earth-based). Submit your own if you have a robot you’d like to shame. You can also follow the fun discussion on Twitter at the hashtag #robotshaming.
Astronomer Alex Parker stared the ‘Robot Shaming’ meme with this image of the engineering model of Curiosity at JPL.
Henrik Scharfe and his look-alike, the Geminoid DK. Credit: Geminoid DK
Even though the Star Trek character “Data” was played by a human, this new android might be more life-like. Watch the video, and I think you’ll agree that it is hard to tell (at first) that this is a robot. It’s called Geminoid DK, built by the Intelligent Robotics lab at Osaka University and designed by professor Hiroshi Ishiguro. Just like Data was modeled after his creator Doctor Noonian Soong, the Geminoid DK is created in the likeness of professor Henrik Scharfe of Aalborg University in Denmark. Not sure if it can whistle or if it remembers every fact to which it is exposed, but Geminoid DK has a better hairdo (and beard) than Data, and it can smile.
“All of the movements and expressions of Geminoid DK are remote controlled by an operator with a computer, who uses a motion-capture system that tracks facial expressions and head movements. Turn your head and the Geminoid does the same; move your mouth and the android follows suit,” IEEE Spectrum reports.
The Geminoid is going to be used for researching “emotional affordances” in human-robot interaction, the novel notion of “blended presence,” as well as cultural differences (from different continents) in the perception of robots.
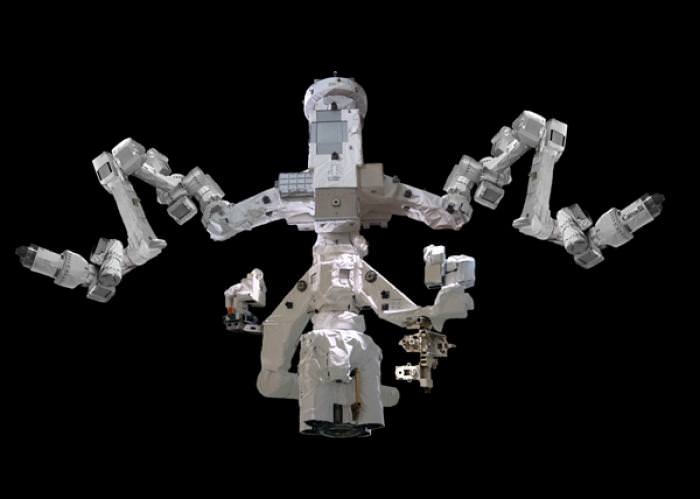
R2 and D2? NASA and General Motors have come together to develop the next generation dexterous humanoid robot. The robots – called Robonaut2 – were designed to use the same tools as humans, which allows them to work safely side-by-side humans on Earth and in space. Credit: NASA
[/caption]
Not sure if it speaks Bocce or understands the binary language of moisture evaporators, but the next generation of NASA’s Robonaut is about to move into the workforce in the automotive and aerospace industries. Engineers and scientists from NASA, General Motors and Oceaneering Space Systems of Houston have worked together to build a new humanoid robot capable of working side by side with people. Robonaut 2, or R2, is a faster, more dexterous and more technologically advanced robot than its predecessor, and this next generation robot can use its hands to do work beyond the scope of prior humanoid machines. R2 can work on Earth or in space.
“This cutting-edge robotics technology holds great promise, not only for NASA, but also for the nation,” said Doug Cooke, NASA’s associate administrator for the Exploration Systems Mission Directorate. “I’m very excited about the new opportunities for human and robotic exploration these versatile robots provide across a wide range of applications.”
Using leading edge control, sensor and vision technologies, future robots could assist astronauts during hazardous space missions and help GM build safer cars and plants.
R2 reaches for the stars? Credit: NASA
“For GM, this is about safer cars and safer plants,” said Alan Taub, GM’s vice president for global research and development. “When it comes to future vehicles, the advancements in controls, sensors and vision technology can be used to develop advanced vehicle safety systems. The partnership’s vision is to explore advanced robots working together in harmony with people, building better, higher quality vehicles in a safer, more competitive manufacturing environment.”
The original Robonaut, a humanoid robot designed for space travel, was built about 10 years ago at Johnson Space Center. During the past decade, NASA gained significant expertise in building robotic technologies for space applications. Will these new robots go to galaxies far, far away and be grease monkeys? Only time will tell.
When it comes to exploring the hostile environment of space, robots have done a lot (if not most) of the exploring. The only other planet besides Earth that humans have set foot on is the Moon. Robotic explorers, however, have set down on the Moon, Mars, Venus, Titan and Jupiter, as well as a few comets and asteroids. Robotic missions can travel further and faster, and can return more scientific data than missions that include humans. There is much debate on whether the future of space exploration should rely solely on robots, or whether humans should have a role.
As contentious as this issue is, there is no doubt that robots have and will continue to contribute to our understanding of the Universe. Here’s a short list of past, current, and future robotic missions that have done or will do much in the way of exploration of our cosmos.
The most famous robots in space have to be the series of orbiters, rovers and landers that have been sent to Mars. The first orbiter was Mariner 4, which flew past Mars on July 14, 1965 and took the first close up photos of another planet. The first landers were the Viking landers. Viking 1 landed July 20, 1976, and Viking 2 on September 3, 1976. Both landers were accompanied by orbiters that took photos and scientific data from above the planet. The landers included instruments to detect for life on the surface of Mars, but the data they returned is somewhat ambiguous, and the question of whether there is life on Mars still requires an answer. Currently, Spirit and Opportunity are roving away on the Martian surface, well past their expected mission lifetime, and the Phoenix lander returned a wealth of information about our neighbor. For more about the entire series of Mars missions, go to NASA’s Mars Exploration Program website. Of course, NASA isn’t the only space organization represented at Mars – the European Space Agency currently has Mars Express orbiting the planet, and has the first webcam of another planet available!
Mars isn’t the only place to go in the Solar System, though. Both the U.S. and the Russians sent numerous missions to Venus, with a lot of successes and failures. For a complete list of the many missions to Venus visit the Planetary Society. The most notable firsts are: Mariner 2 was the first successful Venus flyby on December 14, 1962, and the Russian lander Venera 7 was the first human-made vehicle to successfully land on another planet and transmit data back to Earth on December 14, 1962.
Sputnik 1, of course, was the first robot in space, and was launched October 4th, 1957 by the USSR.
The Voyager missions are notable for the milestone of having a robot leave the Solar System. Voyager 1 and 2 were launched in 1977 are still making their way out of the Solar System, and have entered the heliopause, where the solar wind starts to drop off, and the interstellar wind picks up. To keep up with their status, visit the weekly status page.
Dextre, a robotic arm developed by the Canadian Space Association, is a very cool robot aboard the International Space Station. Dexter allows for delicate manipulation of objects outside the station, reducing the number of space walks and increasing the ability of the ISS crew to maintain and upgrade the station.
This is by no means an exhaustive list of the enormous number of robotic space missions. To learn a lot, lot more check out the Astronomy Cast episode on Robots in Space, the ESA robotics page, NASA missions page, and the Planetary Society missions page.











 Venus, with a lot of successes and failures. For a complete list of the many missions to Venus visit the
Venus, with a lot of successes and failures. For a complete list of the many missions to Venus visit the