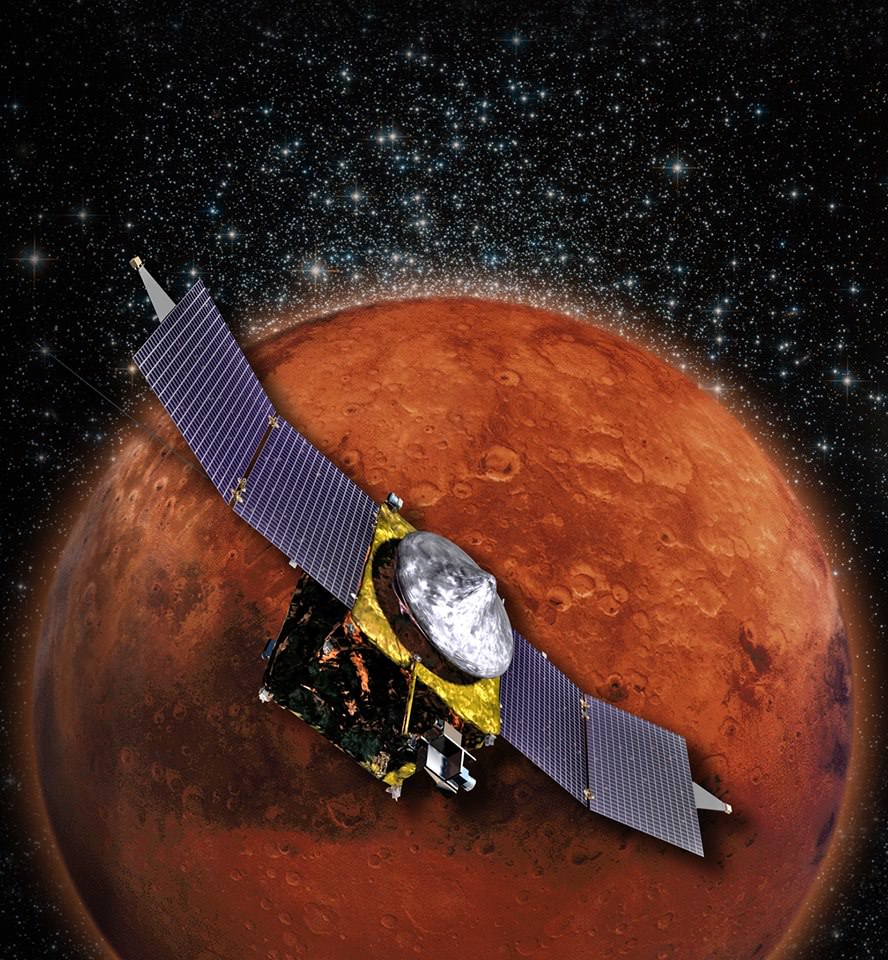
Now just 3 weeks and 4 million miles (6 million kilometers) from rendezvous with Mars, NASA’s ground breaking Mars Atmosphere and Volatile Evolution (MAVEN) orbiter is tracking precisely on course for the crucial Mars Orbital Insertion (MOI) engine firing slated for September 21, 2014.
MAVEN will investigate Mars transition from its ancient, water-covered past, to the cold, dry, dusty world that it has become today.
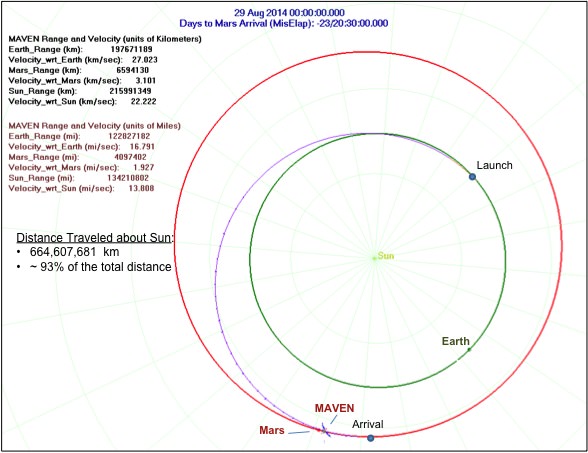
It’s been a picture perfect flight thus far during the ten month interplanetary voyage from Earth to Mars. To date it has traveled 93% of the path to the Red Planet.
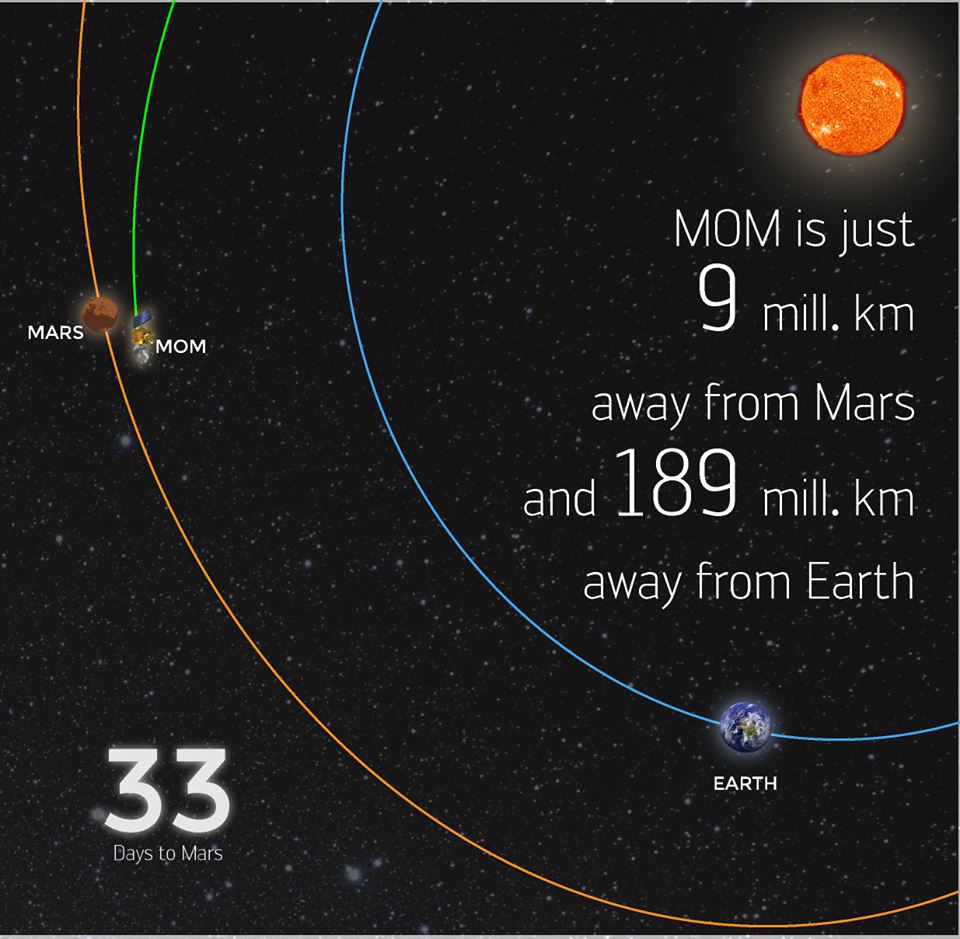
As of August 29th, MAVEN was 198 million kilometers (123 million miles) from Earth and 6.6 million kilometers (4.1 million miles) from Mars. Its velocity is 22.22 kilometers per second (49,705 miles per hour) as it moves on a heliocentric arc around the Sun.
“MAVEN continues on a smooth journey to Mars. All spacecraft systems are operating nominally,” reported David Mitchell, MAVEN Project Manager at NASA’s Goddard Space Flight Center, in an update.
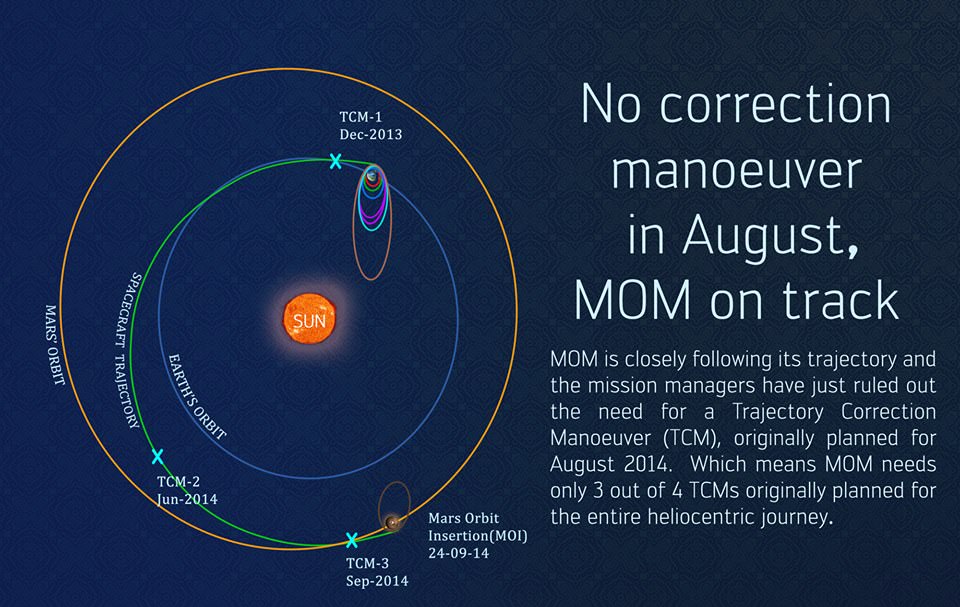
In fact, MAVEN’s navigation from Earth to Mars has been so perfect that the team will likely cancel the final Trajectory Correction Maneuver (TCM) that had been planned for September 12.
The team will make a final decision on whether TCM-4 is necessary on Sept. 4.
Previously the team also cancelled TCM-3 that had been planned for July 23 because it was “not warranted.”
“We are tracking right where we want to be,” says Mitchell.
TCM-1 and TCM-2 took place as scheduled in December 2013 and February 2014, Bruce Jakosky, MAVEN’s Principal Investigator told Universe Today.
These thruster firings ensure the craft is aimed on the correct course through interplanetary space.
See MAVEN’s trajectory route map below.
“Since we are now in a ‘pre-Mars Orbit Insertion (MOI) moratorium’, all instruments are powered off until after we arrive at the Red Planet,” according to Mitchell.
Although MAVEN’s instrument are resting, the team has no time to rest.
They must ensure that all is in readiness for the MOI burn and held a review at the Jet Propulsion Laboratory with the Deep Space Network (DSN) team and confirmed its readiness to support the engine firing on MOI night.
The entire team also conducted a readiness rehearsal, comprising Lockheed Martin operations center in Denver, Colorado, the backup operations center at Goddard Space Flight Center in Greenbelt, Maryland, and the Jet Propulsion Laboratory in Pasadena, California.
“The review was successful; DSN is ready to support us on MOI night,” says Mitchell.
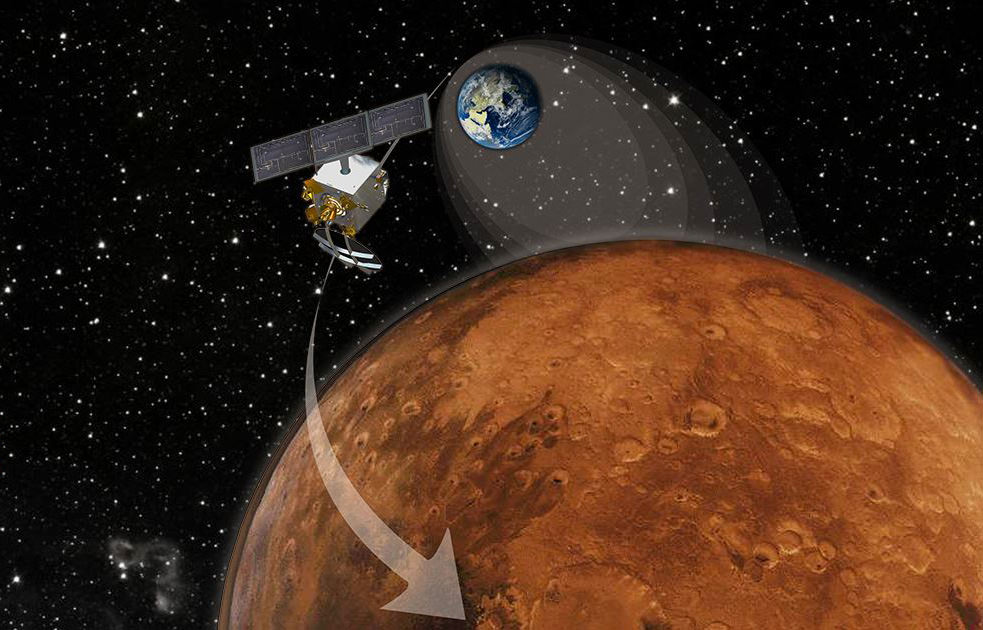
The do or die MOI maneuver is scheduled for approximately 10 p.m. EDT on Sept. 21, 2014 when MAVEN will rendezvous with the Red Planet following a ten month interplanetary voyage from Earth.
The $671 Million MAVEN spacecraft’s goal is to study Mars upper atmosphere to explore how the Red Planet lost most of its atmosphere and water over billions of years.
The MAVEN probe carries nine sensors in three instrument suites to study why and exactly when did Mars undergo the radical climatic transformation.
“I’m really looking forward to getting to Mars and starting our science!” Bruce Jakosky, MAVEN’s Principal Investigator from the University of Colorado at Boulder, told me.
MAVEN aims to discover the history of water and habitability stretching back over billions of years on Mars.
It will measure current rates of atmospheric loss to determine how and when Mars lost its atmosphere and water.

MAVEN thundered to space over nine months ago on Nov. 18, 2013 following a flawless blastoff from Cape Canaveral Air Force Station’s Space Launch Complex 41 atop a powerful Atlas V rocket and thus began a 10 month interplanetary voyage from Earth to the Red Planet.
MAVEN is streaking to Mars along with ISRO’s MOM orbiter, which arrives a few days later on September 24, 2014.
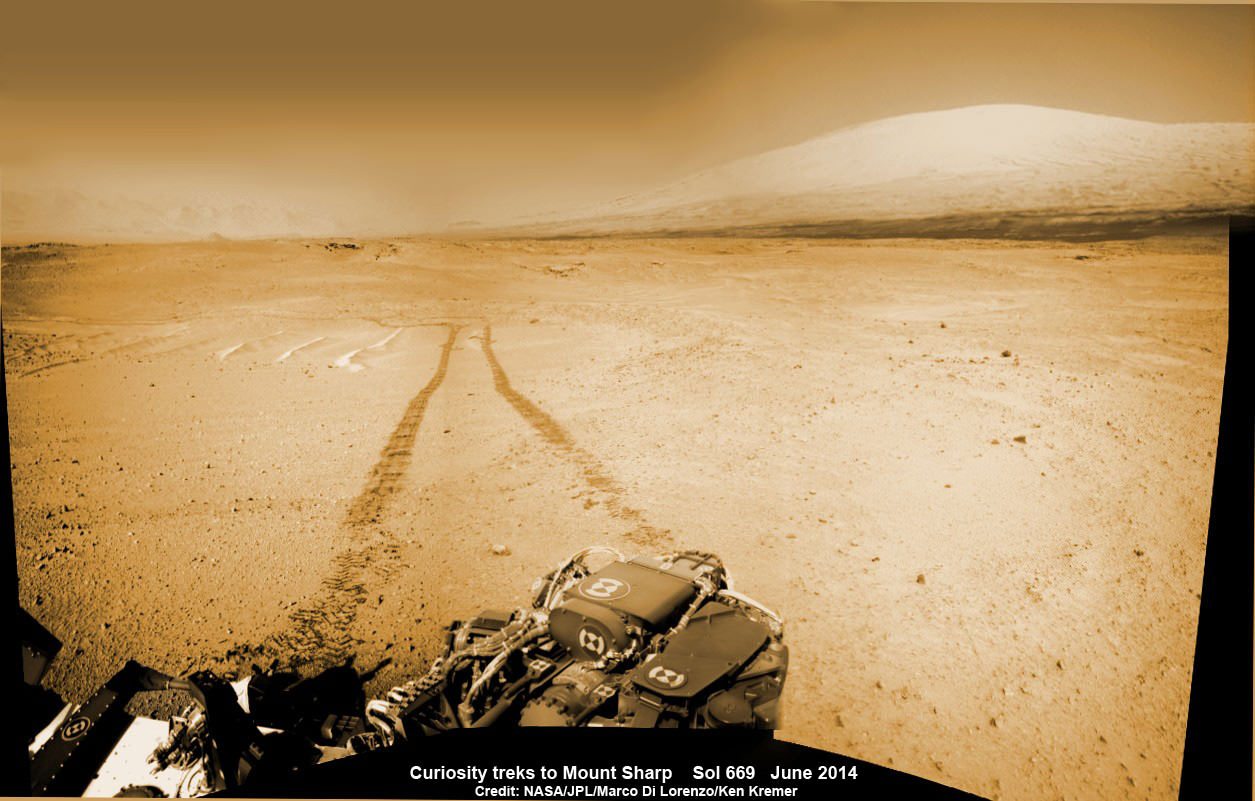
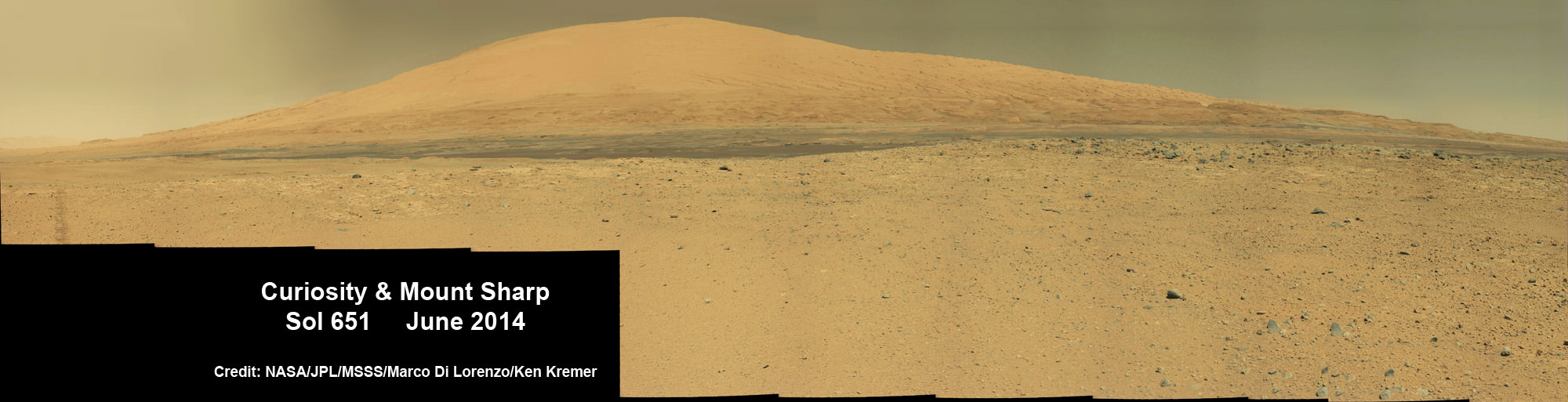
MOM and MAVEN will join Earth’s fleet of 3 current orbiters from NASA and ESA as well as NASA’s pair of sister surface rovers Curiosity and Opportunity.
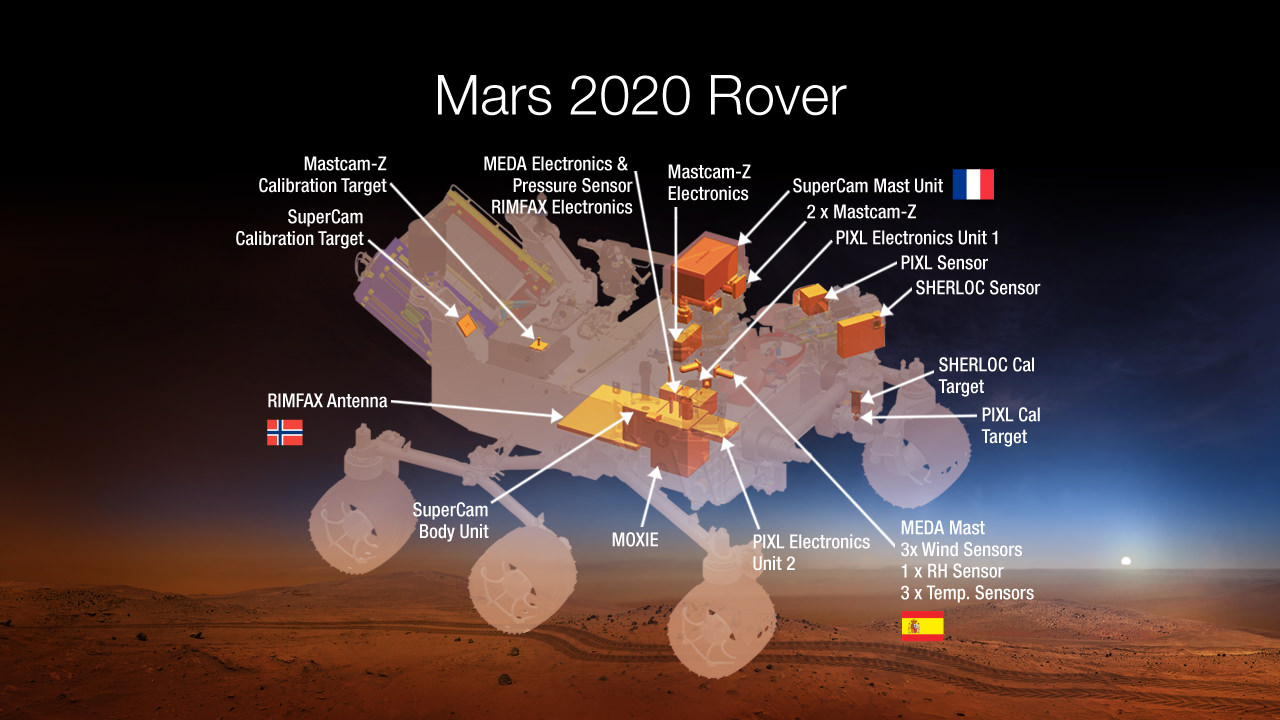
Meanwhile last week, NASA announced it was proceeding with development of the mammoth SLS heavy lift rocket that will one day launch astronauts to Mars in the Orion capsule.
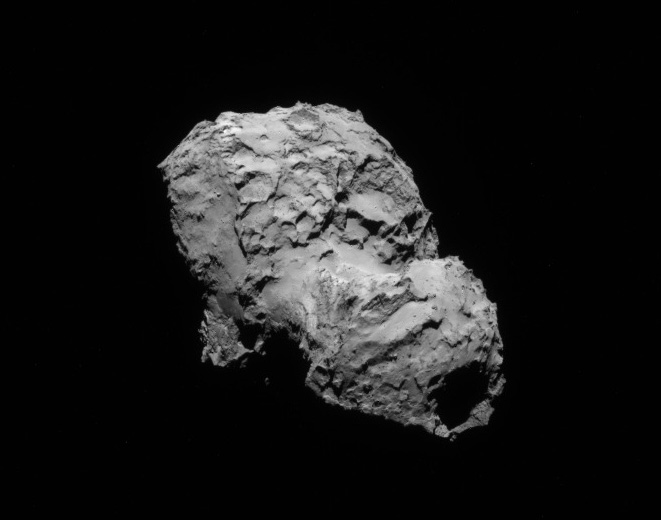
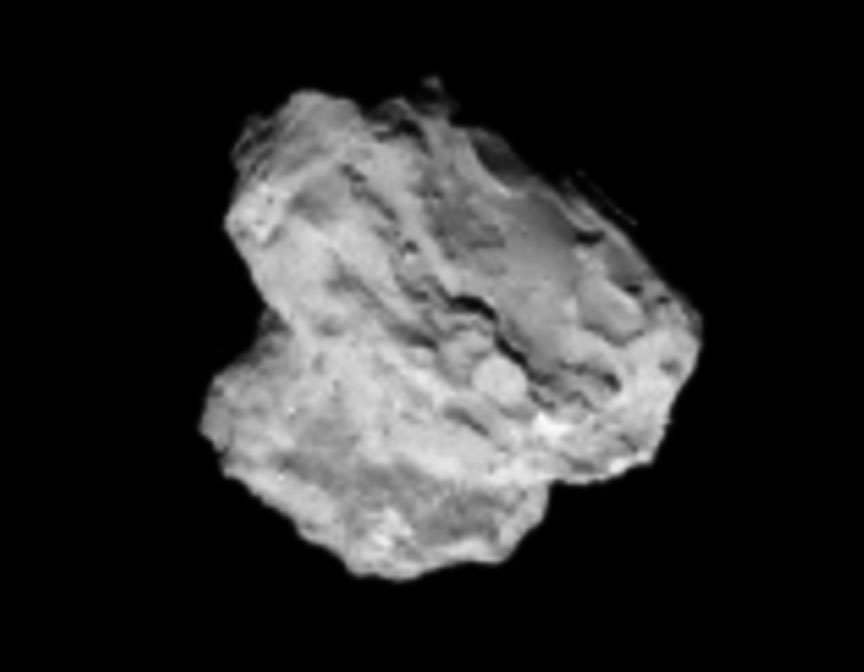
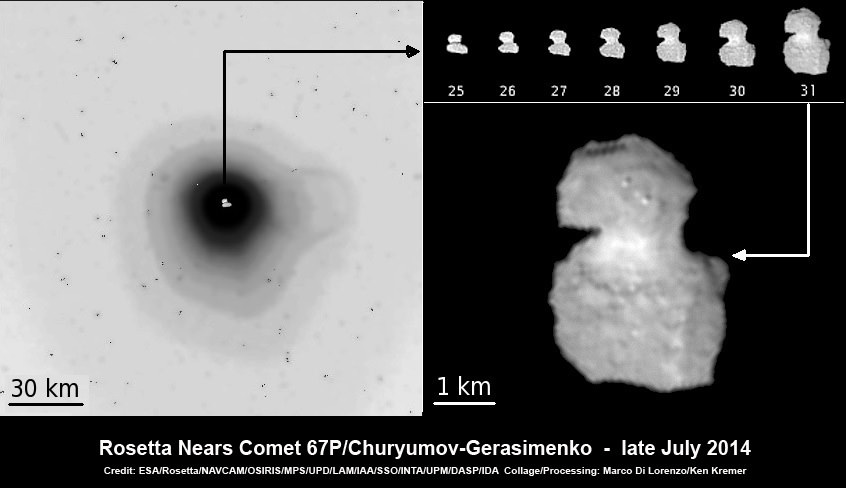
Stay tuned here for Ken’s continuing MAVEN, MOM, Rosetta, Opportunity, Curiosity, Mars rover and more Earth and planetary science and human spaceflight news.