Taken just after the flight of Voskhod 2 in 1965, in order of flight (from left), the first Soviet cosmonauts: Yuri Gagarin, Gherman Titov, Andrian Nikolayev, Pavel Popovich, Valeri Bykovsky, Valentina Tereshkova, Konstantin Feoktistov, Vladimir Komarov, Boris Yegorov, Pavel Belyayev and Alexei Leonov.
Alexei had just returned to Earth after performing the first spacewalk in history during the Voskhod 2 mission.
Credit: alldayru.com, via ESA.
In the history of spaceflight, only one nation has made contributions that rival or supersede those of the Soviet Union or Russia. While the Soviets are credited with making the historic firsts that launched the “Space Age“, the contributions made by Russian scientists predate this period considerably. In terms of theory, the history of Russian space exploration goes back to the 19th century.
However, as with the United States, the practice of sending missions to space did not begin until after World War II. It was at this time, during the fabled “Space Race” between the east and the west, that the Soviet Union conducted several pioneering missions in robotic and crewed spaceflight. These contributions have continued since the collapse of the Soviet Union in 1991, ensuring Russia’s continued role as a superpower in space.
We’re always talking about Mars here on the Guide to Space. And with good reason. Mars is awesome, and there’s a fleet of spacecraft orbiting, probing and crawling around the surface of Mars.
The Red Planet is the focus of so much of our attention because it’s reasonably close and offers humanity a viable place for a second home. Well, not exactly viable, but with the right technology and techniques, we might be able to make a sustainable civilization there.
We have the surface of Mars mapped in great detail, and we know what it looks like from the surface.
But there’s another planet we need to keep in mind: Venus. It’s bigger, and closer than Mars. And sure, it’s a hellish deathscape that would kill you in moments if you ever set foot on it, but it’s still pretty interesting and mysterious to visit.
Would it surprise you to know that many spacecraft have actually made it down to the surface of Venus, and photographed the place from the ground? It was an amazing feat of Soviet engineering, and there are some new technologies in the works that might help us get back, and explore it longer.
Venera 10 image of Venusian surface (1975). 174-degree raw 6-bit logarithmically encoded telemetry seen above. Linearized and aperture corrected view in center, including data from a second 124-degree panorama. Bottom image had missing portions in-painted with Bertalmio’s algorithm.
Today, let’s talk about the Soviet Venera program. The first time humanity saw Venus from its surface.
Back in the 60s, in the height of the cold war, the Americans and the Soviets were racing to be the first to explore the Solar System. First satellite to orbit Earth (Soviets), first human to orbit Earth (Soviets), first flyby and landing on the Moon (Soviets), first flyby of Mars (Americans), first flyby of Venus (Americans), etc.
The Soviets set their sights on putting a lander down on the surface of Venus. But as we know, this planet has some unique challenges. Every place on the entire planet measures the same 462 degrees C (or 864 F).
Furthermore, the atmospheric pressure on the surface of Venus is 90 times greater than Earth. Being down at the bottom of that column of atmosphere is the same as being beneath a kilometer of ocean on Earth. Remember those submarine movies where they dive too deep and get crushed like a soda can?
Finally, it rains sulphuric acid. I mean, that’s really irritating.
Needless to say, figuring this out took the Soviets a few tries.
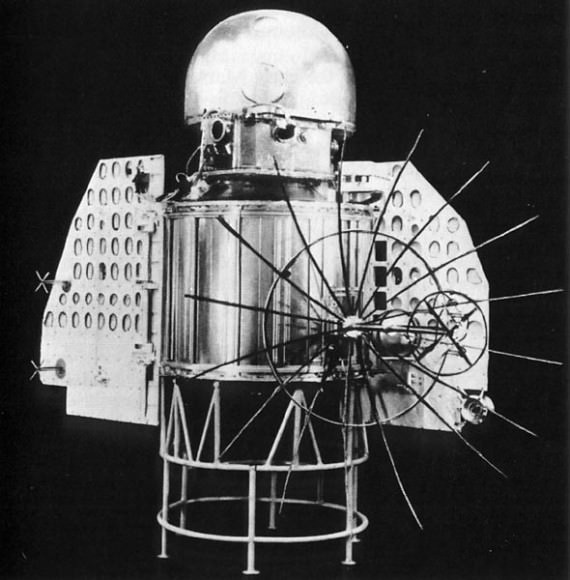
The Venera 1 spacecraft
Their first attempts to even flyby Venus was Venera 1, on February 4, 1961. But it failed to even escape Earth orbit. This was followed by Venera 2, launched on November 12, 1965, but it went off course just after launch.
Venera 3 blasted off on November 16, 1965, and was intended to land on the surface of Venus. The Soviets lost communication with the spacecraft, but it’s believed it did actually crash land on Venus. So I guess that was the first successful “landing” on Venus?
Before I continue, I’d like to talk a little bit about landing on planets. As we’ve discussed in the past, landing on Mars is really really hard. The atmosphere is thick enough that spacecraft will burn up if you aim directly for the surface, but it’s not thick enough to let you use parachutes to gently land on the surface.
Landing on the surface of Venus on the other hand, is super easy. The atmosphere is so thick that you can use parachutes no problem. If you can get on target and deploy a parachute capable of handling the terrible environment, your soft landing is pretty much assured. Surviving down there is another story, but we’ll get to that.
Venera 4 came next, launched on June 12, 1967. The Soviet scientists had few clues about what the surface of Venus was actually like. They didn’t know the atmospheric pressure, guessing it might be a little higher pressure than Earth, or maybe it was hundreds of times our pressure. It was tested with high temperatures, and brutal deceleration. They thought they’d built this thing plenty tough.
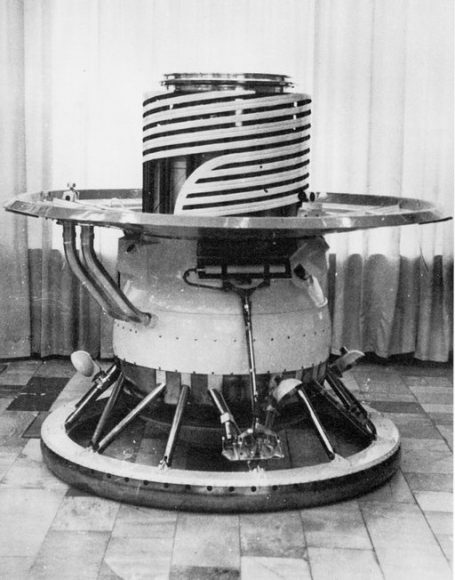
The Venera 4 spacecraft. Venera spacecraft 3 to 6 were similar. Image supplied by NASA
Venera 4 arrived at Venus on October 18, 1967, and tried to survive a landing. Temperatures on its heat shield were clocked at 11,000 C, and it experienced 300 Gs of deceleration.
The initial temperature 52 km was a nice 33C, but then as it descended down towards the surface, temperatures increased to 262 C. And then, they lost contact with the probe, killed dead by the horrible temperature.
We can assume it landed, though, and for the first time, scientists caught a glimpse of just how bad it is down there on the surface of Venus.
Venera 5 was launched on January 5, 1969, and was built tougher, learning from the lessons of Venera 4. It also made it into Venus’ atmosphere, returned some interested science about the planet and then died before it reached the surface.
Venera 6 followed, same deal. Built tougher, died in the atmosphere, returned some useful science.
Venera 7 was built with a full understanding of how bad it was down there on Venus. It launched on August 17, 1970, and arrived in December. It’s believed that the parachutes on the spacecraft only partially deployed, allowing it to descend more quickly through the Venusian atmosphere than originally planned. It smacked into the surface going about 16.5 m/s, but amazingly, it survived, and continued to send back a weak signal to Earth for about 23 minutes.
For the first time ever, a spacecraft had made it down to the surface of Venus and communicated its status. I’m sure it was just 23 minutes of robotic screaming, but still, progress. Scientists got their first accurate measurement of the temperatures, and pressure down there.
Bottom line, humans could never survive on the surface of Venus.
Venera 8 blasted off for Venus on March 17, 1972, and the Soviet engineers built it to survive the descent and landing as long as possible. It made it through the atmosphere, landed on the surface, and returned data for about 50 minutes. It didn’t have a camera, but it did have a light sensor, which told scientists being on Venus was kind of like Earth on an overcast day. Enough light to take pictures… next time.
The Venera 9 spacecraft. Image supplied by NASA
For their next missions, the Soviets went back to the drawing board and built entirely new landing craft. Built big, heavy and tough, designed to get to the surface of Venus and survive long enough to send back data and pictures.
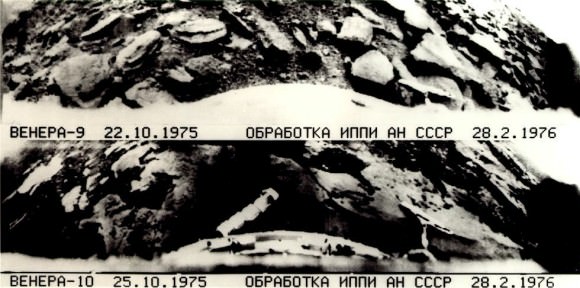
Venera 9 was launched on June 8, 1975. It survived the atmospheric descent and landed on the surface of Venus. The lander was built like a liquid cooled reverse insulated pressure vessel, using circulating fluid to keep the electronics cooled as long as possible. In this case, that was 53 minutes. Venera 9 measured clouds of acid, bromine and other toxic chemicals, and sent back grainy black and white television pictures from the surface of Venus.
In fact, these were the first pictures ever taken from the surface of another planet.
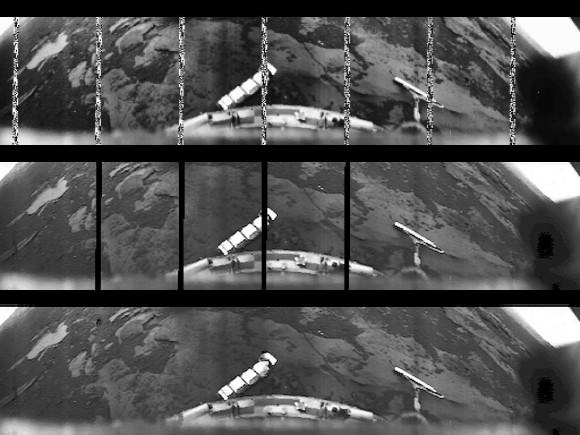
Images from Venera 9 (top) and Venera 10 (bottom). Public Domain Images, courtesy of NASA/National Space Science Data Center.
Venera 10 lasted for 65 minutes and took pictures of the surface with one camera. The lens cap on a second camera didn’t release. The spacecraft saw lava rocks with layers of other rocks in between. Similar environments that you might see here on Earth.
Venera 11 was launched on September 9, 1975 and lasted for 95 minutes on the surface of Venus. In addition to confirming the horrible environment discovered by the other landers, Venera 11 detected lightning strikes in the vicinity. It was equipped with a color camera, but again, the lens cap failed to deploy for it or the black and white camera. So it failed to send any pictures home.
Venera 12 was launched on September 14, 1978, and made it down to the surface of Venus. It lasted 110 minutes and returned detailed information about the chemical composition of the atmosphere. Unfortunately, both its camera lens caps failed to deploy, so no pictures were returned. And pictures are what we really care about, right?
Venera 13 was built on the same tougher, beefier design, and was blasted off to Venus on October 30, 1981, and this one was a tremendous success. It landed on Venus and survived for 127 minutes. It took pictures of its surroundings using two cameras peering through quartz windows, and saw a landscape of bedrock. It used spring-loaded arms to test out how compressible the soil was.
The surface of Venus as captured by Soviet Venera 13 lander in March of 1982. NASA/courtesy of nasaimages.org
Venera 14 was identical and launched just 5 days after Venera 13. It also landed and survived for 57 minutes. Unfortunately, its experiment to test the compressibility of the soil was a botch because one of its lens caps landed right under its spring-loaded arm. But apart from that, it sent back color pictures of the hellish landscape.
And with that, the Soviet Venus landing program ended. And since then, no additional spacecraft have ever returned to the surface of Venus.
It’s one thing for a lander to make it to the surface of Venus, last a few minutes and then die from the horrible environment. What we really want is some kind of rover, like Curiosity, which would last on the surface of Venus for weeks, months or even years and do more science.
And computers don’t like this kind of heat. Go ahead, put your computer in the oven and set it to 850. Oh, your oven doesn’t go to 850, that’s fine, because it would be insane. Seriously, don’t do that, it would be bad.
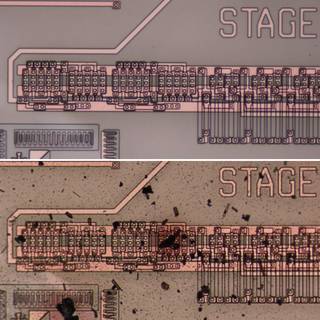
Engineers at NASA’s Glenn Research Center have developed a new kind of electrical circuitry that might be able to handle those kinds of temperatures. Their new circuits were tested in the Glenn Extreme Environments Rig, which can simulate the surface of Venus. It can mimic the temperature, pressure and even the chemistry of Venus’ atmosphere.
A before (top) and after (bottom) image of the electronics after being tested in the Glenn Extreme Environments Rig. Credit: NASA
The circuitry, originally designed for hot jet engines, lasted for 521 hours, functioning perfectly. If all goes well, future Venus rovers could be developed to survive on the surface of Venus without needing the complex and short lived cooling systems.
This discovery might unleash a whole new era of exploration of Venus, to confirm once and for all that it really does suck.
While the Soviets had a tough time with Mars, they really nailed it with Venus. You can see how they built and launched spacecraft after spacecraft, sticking with this challenge until they got the pictures and data they were looking for. I really think this series is one of the triumphs of robotic space exploration, and I look forward to future mission concepts to pick up where the Soviets left off.
Are you excited about the prospects of exploring Venus with rovers? Let me know your thoughts in the comments.
Orbital Sciences Corporation Antares rocket and Cygnus spacecraft blasts off on July 13 2014 from Launch Pad 0A at NASA Wallops Flight Facility , VA, on the Orb-2 mission and loaded with over 3000 pounds of science experiments and supplies for the crew aboard the International Space Station. Credit: Ken Kremer - kenkremer.com
The newly merged company Orbital ATK is aiming to restart launches of their “upgraded Antares” rocket in March 2016 using completely new engines, following the catastrophic explosion on Oct. 28, 2014 that destroyed the rocket seconds after blastoff from a Virginia launch pad. Antares was carrying a Cygnus module loaded with supplies on a critical space station resupply mission for NASA.
The March 2016 launch date of Antares from the Wallops Island base along Virginia’s eastern shore was announced by David Thompson, Orbital ATK, President and CEO, during a recent conference call with investors and analysts regarding the formal merger of Orbital Sciences and ATK.
“The target date for that [Antares launch] is the 1st of March next year,” said Thompson.
Cygnus will be fully loaded with new supplies for the station crew.
“The first launch … will have a full cargo load on board.”
The Orbital Sciences Corp. commercial Antares rocket was destroyed in a raging inferno about 15 seconds after liftoff on Oct. 28 when one of the Soviet-era built first stage engines apparently exploded and cascaded into a spectacular aerial fireball just above the launch pad 0A at NASA’s Wallops Flight Facility on the doomed Orb-3 mission carrying the Cygnus resupply module to the International Space Station (ISS).
First stage propulsion system at base of Orbital Sciences Antares rocket appears to explode moments after blastoff from NASA’s Wallops Flight Facility, VA, on Oct. 28, 2014, at 6:22 p.m. Credit: Ken Kremer – kenkremer.com
Orbital’s privately developed Cygnus pressurized cargo freighter was loaded with nearly 5000 pounds (2200 kg) of science experiments, research instruments, crew provisions, spare parts, spacewalk and computer equipment and gear on the Orb-3 mission. The module and all its contents were destroyed.
Orbital established an independent accident investigation review board immediately following the launch failure.
“We are about four months now into the recovery from the failure,’ said Thompson.
The AJ26 engines were originally manufactured some 40 years ago in the then Soviet Union as the NK-33. They were refurbished and “Americanized” by Aerojet Rocketdyne.
Antares doomed descent to incendiary destruction after first stage propulsion system of Orbital Sciences’ rocket exploded moments after blastoff from NASA’s Wallops Flight Facility, VA, on Oct. 28, 2014. Credit: Ken Kremer – kenkremer.com
“The next Cygnus will be launched on the upgraded Antares from Wallops Island. The target date for that is the 1st of March next year.”
After the launch failure Orbital, decided to ditch the trouble plagued AJ-26 and “re-engineered” the vehicle with new engines.
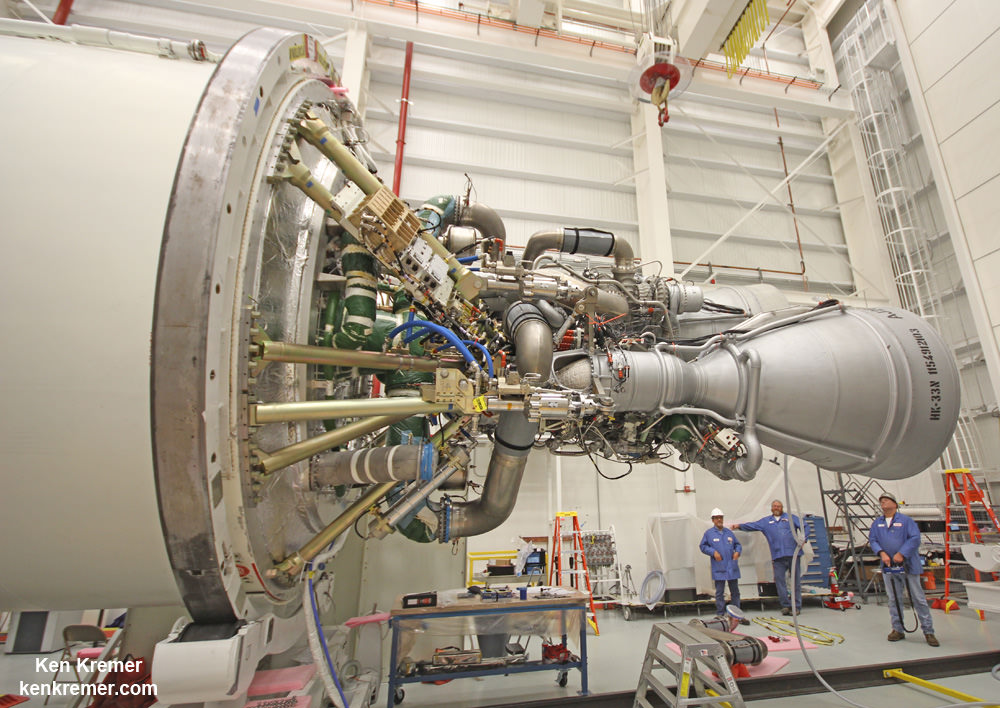
The Antares first stage had been powered by a pair of the aging AJ26 engines. These will now be replaced by a pair of newly manufactured Russian RD-181 engines, assembled and purchased from NPO Energomash.
“The first launch of the re-engineered vehicle in March of next year … will have a full cargo load on board.”
Thompson said the March 2016 launch target date will be preceded by a hot fire test of the first stage engines, which is currently planned to take place in January 2015. They will not conduct a demonstration launch and have opted for a full up space station resupply flight.
“We’re going to go with the cargo load on the first launch. What we are going to do in advance of that, in January of next year, is we’re going to take the first stage of Antares out to the launch pad with the new engines and do a flight readiness firing, somewhat similar to what we did back in early 2013, in advance of the first Antares flight,” said Thompson.
“But other than that, unless something came up there that was surprising, we should then be able to proceed pretty expeditiously to the first launch of the re-engineered vehicle in March of next year, and that will have a full cargo load on board.”
Orbital Sciences technicians at work on two AJ26 first stage engines at the base of an Antares rocket during exclusive visit by Ken Kremer/Universe Today at NASA Wallaps. These engines powered the successful Antares liftoff on Jan. 9, 2014 at NASA Wallops, Virginia bound for the ISS. Credit: Ken Kremer – kenkremer.com
Thompson also reiterated that Orbital will fully meet its resupply services contarct with NASA and make up for the lost cargo.
The Orbital-3, or Orb-3, mission that ended in disaster on Oct 28, was to be the third of eight cargo resupply missions to the ISS through 2016 under the NASA Commercial Resupply Services (CRS) contract award valued at $1.9 Billion. Under the CRS program Orbital is to deliver 20,000 kilograms of research experiments, crew provisions, spare parts, and hardware for the eight ISS flights.
“The focus all along has been to do everything we can to fulfill our commitments to delivering cargo to the space station for NASA, and to minimize any disruption that we can to the delivery schedules.”
Towards that end Orbital ATK has contracted with United Launch Alliance (ULA) to launch at least one and up to two Cygnus cargo missions to the International Space Station (ISS) under NASA’s Commercial Resupply Services (CRS) program.
The first Cygnus mission would liftoff sometime late in the fourth quarter of 2015 aboard an Atlas V 401 vehicle from Space Launch Complex 41 (SLC-41) at Cape Canaveral Air Force Station in Florida.
I watched the unfolding disaster first hand from the media viewing site about 1.8 miles away and filed eyewitness reports at the time. Several of my launch pad remote cameras were set up at the pad. They were impounded and the images were used by investigators during the initial investigation. They were returned to me about a month later and are featured here and in my earlier Antares reports.
Watch here for Ken’s ongoing reporting about Antares and NASA Wallops.
Stay tuned here for Ken’s continuing Earth and Planetary science and human spaceflight news.
Hotfire test of Aerojet Rocketdyne AJ26 engines on the E-1 Test Stand at NASA’s Stennis Space Center on Jan 17, 2014. Credit: NASA
Hotfire test of Aerojet Rocketdyne AJ26 engines on the E-1 Test Stand at NASA’s Stennis Space Center on Jan 17, 2014. Credit: NASA
See up close AJ26 photos below[/caption]
A Russian built rocket engine planned for future use in the first stage of Orbital Sciences Corp. commercial Antares rocket launching to the International Space Station failed during pre-launch acceptance testing on Thursday afternoon, May 22, at NASA’s Stennis Space Center in Mississippi.
“There was a test failure at Stennis yesterday afternoon (May 22),” Orbital Sciences spokesman Barry Beneski told Universe Today.
The Aerojet Rocketdyne AJ26 rocket engine failed with extensive damage about halfway through the planned test aimed at qualifying the engine for an Antares flight scheduled for early next year.
“Engineers are examining data to determine the cause of the failure,” Beneski told me.
The test was initiated at about 3:00 p.m. EDT on Thursday and the anomaly occurred approximately 30 seconds into the planned 54-second test.
“It terminated prematurely, resulting in extensive damage to the engine,” Orbital said in a statement.
An investigation into the incident by Aerojet and NASA has begun. The cause of the failure is not known.
“During hot-fire testing on May 22 at NASA’s Stennis Space Center, Aerojet Rocketdyne’s AJ26 engine experienced a test anomaly. The company is leading an investigation to determine the cause,” Aerojet spokesperson Jessica Pieczonka told Universe Today.
Up close view of two AJ26 first stage engines at the base of an Antares rocket at NASA Wallops during exclusive visit by Ken Kremer/Universe Today. These engines powered the successful Antares liftoff on Jan. 9, 2014 at NASA Wallops, Virginia. Credit: Ken Kremer – kenkremer.com
Fortunately no one was hurt.
“There were no injuries,” Pieczonka confirmed to me.
A team of NASA, Orbital Sciences Corporation, Aerojet Rocketdyne and Lockheed Martin engineers tests all of the AJ26 engines on the E-1 Test Stand at NASA’s Stennis Space Center before delivering them to the launch site at NASA’s Wallops Flight Facility in Virginia.
The testing program began in November 2010.
“Stennis will perform checkouts to the facility to ensure its operational integrity,” NASA Stennis spokesperson Rebecca Strecker told me.
Antares first stage is powered by a pair of liquid oxygen and kerosene fueled AJ26-62 engines that deliver a combined 734,000 pounds (3265 kilonewtons) of sea level thrust.
To date, the AJ26 engines have performed flawlessly through a total of three Antares launches from NASA’s Wallops Flight Facility in Virginia.
They measure 3.3 meters (10.9 feet) in height and weigh 1590 kg (3,500 lb.).
Side view of two AJ26 first stage engines at the base of an Antares rocket during exclusive visit by Ken Kremer/Universe Today. These engines powered the successful Antares liftoff on Jan. 9, 2014 at NASA Wallops, Virginia. Credit: Ken Kremer – kenkremer.com
The next Antares rocket is slated to blastoff on June 10 with the Cygnus cargo freighter on the Orb-2 resupply mission to the ISS.
As of today, it’s not known whether the June flight will have to be postponed.
“It is too early to tell if upcoming Antares flights will be affected,” Beneski said.
The most recent launch of the two stage rocket took place this past winter on Jan. 9, 2014 on the Orb-1 resupply mission.
Orbital Sciences technicians at work on two AJ26 first stage engines at the base of an Antares rocket during exclusive visit by Ken Kremer/Universe Today at NASA Wallaps. These engines powered the successful Antares liftoff on Jan. 9, 2014 at NASA Wallops, Virginia bound for the ISS. Credit: Ken Kremer – kenkremer.com
The AJ26 engines were originally known as the NK-33 and built in the Soviet Union for their manned moon landing program.
Aerojet extensively modified, checked and tested the NK-33 engines now designated as the AJ26-62 to qualify them for use in the first stage Antares core, which is manufactured in Ukraine by the Yuznoye Design Bureau and based on the Zenit launch vehicle.
“Each test of an AJ26 engine is exciting and affirming because it is in direct support of NASA’s commercial space flight efforts, as well as a continuation of a very successful Stennis partnership with Orbital and Aerojet Rocketdyne,” Stennis Director Rick Gilbrech said in an earlier statement.
Antares soars to space on Jan. 9, 2014 from NASA Wallops on Virginia coast on the Orb-1 mission to the ISS. Photo taken by remote camera at launch pad. Credit: Ken Kremer – kenkremer.com
Orbital Sciences was awarded a $1.9 Billion supply contract by NASA to deliver 20,000 kilograms of research experiments, crew provisions, spare parts and hardware for 8 flights to the ISS through 2016 under the Commercial Resupply Services (CRS) initiative.
The June mission would be the second operational Antares/Cygnus flight.
SpaceX has a similar resupply contract using their Falcon 9 rocket and Dragon cargo carrier and just completed their 3rd operational mission to the ISS.
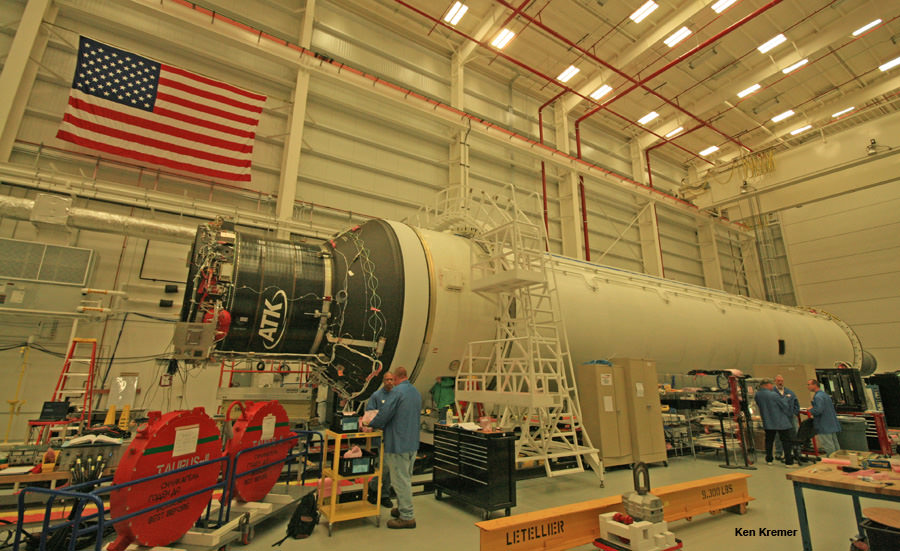
Antares rocket powered by AJ26 1st stage engines successfully launched on Jan. 9, 2014. Here it undergoes processing at the Horizontal Integration Facility at NASA Wallops, Virginia, during exclusive visit by Ken Kremer/Universe Today. Credit: Ken Kremer – kenkremer.com
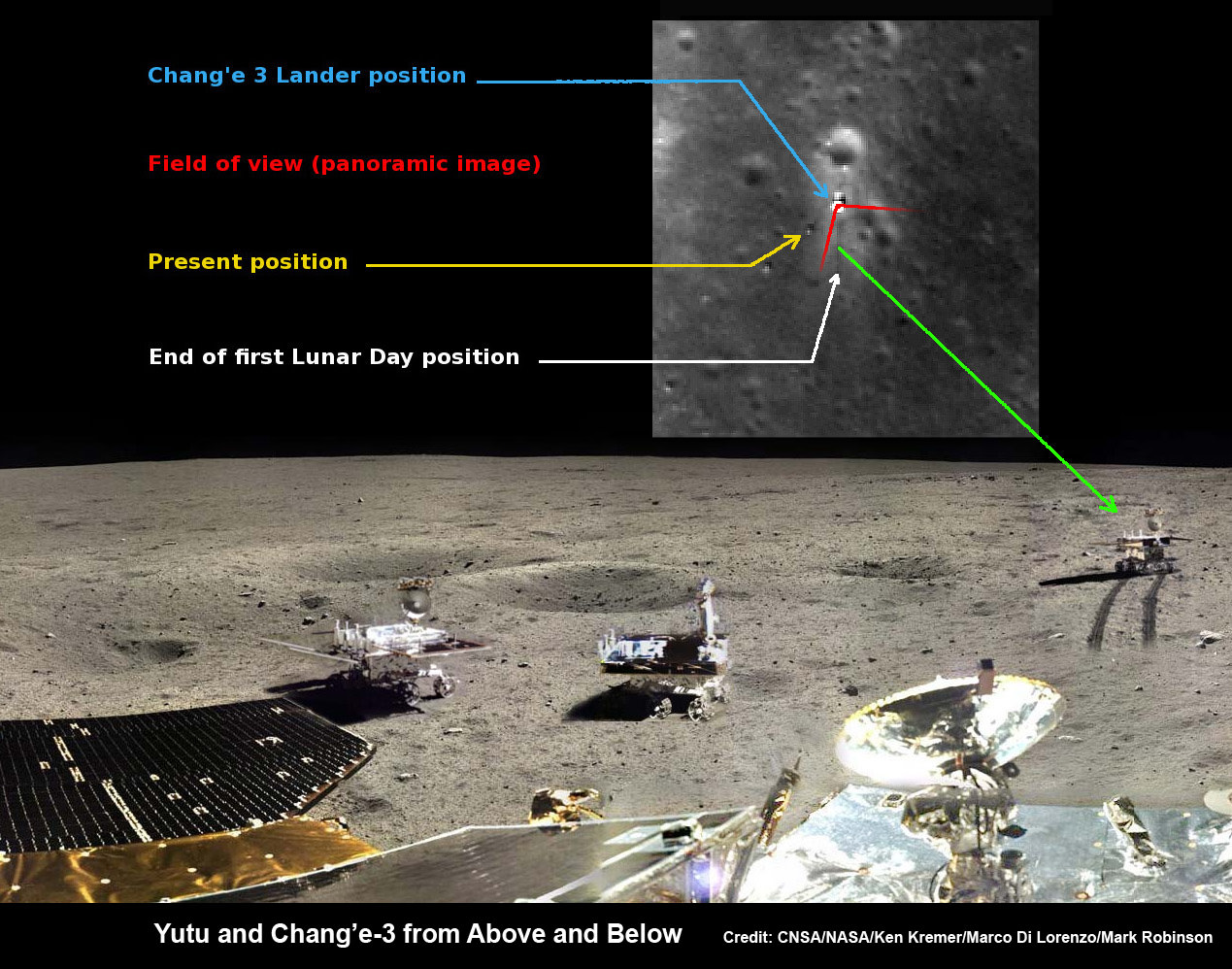
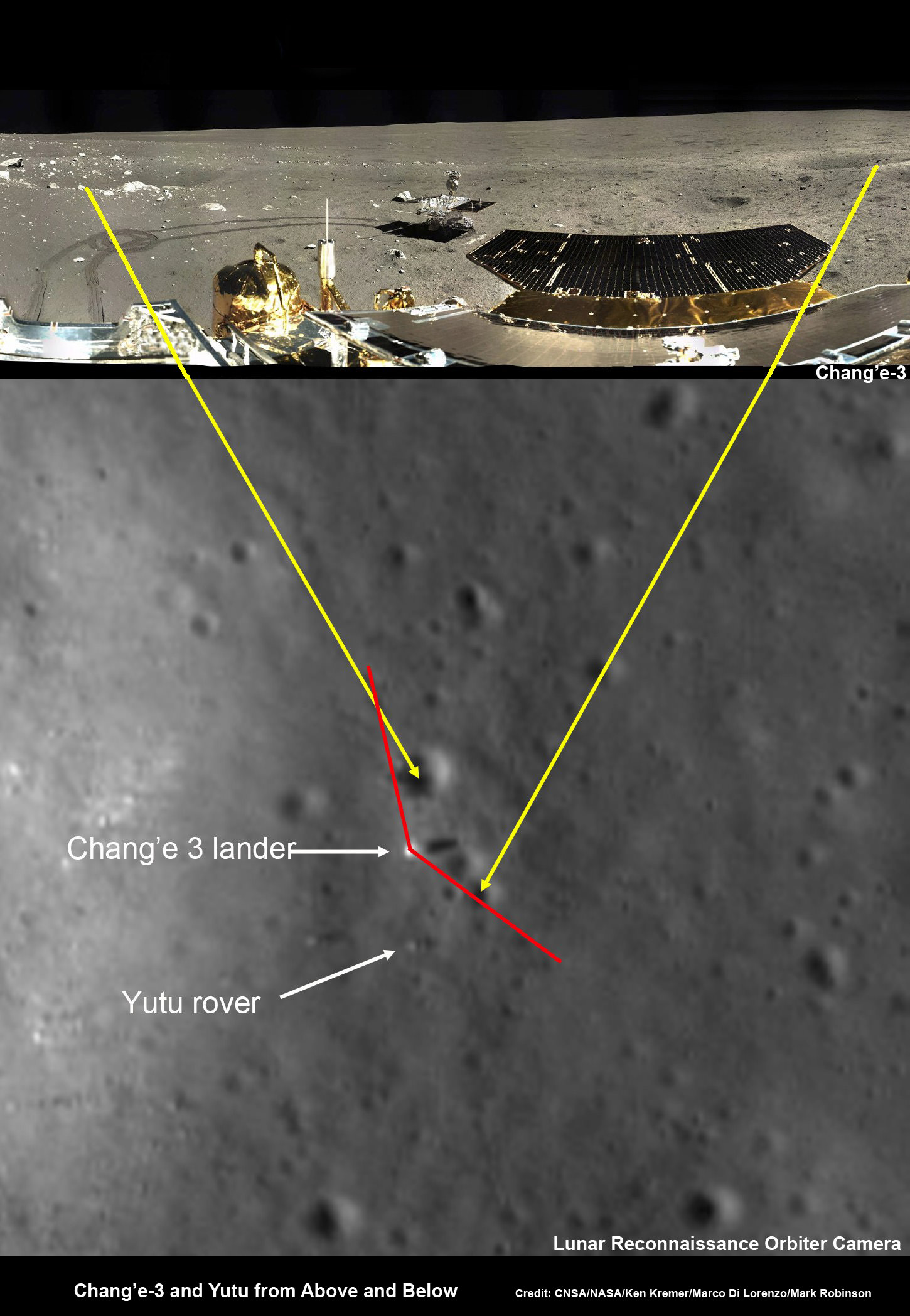
Yutu rover drives around Chang’e-3 lander – from Above And Below. Composite view shows China’s Yutu rover and tracks driving in clockwise direction around Chang’e-3 lander from Above And Below (orbit and surface). The Chang’e-3 timelapse lander color panorama (bottom) and orbital view (top) from NASA’s LRO orbiter shows Yutu rover after it drove down the ramp to the moon’s surface and began driving around the landers right side, passing by craters and heading south on Lunar Day 1. It then moved northwest during Lunar Day 2. Arrows show Yutu’s positions over time. Credit: CNSA/NASA/Ken Kremer/Marco Di Lorenzo/Mark Robinson
Yutu rover drives around Chang’e-3 lander – from Above And Below
Composite view shows China’s Yutu rover and tracks driving in clockwise direction around Chang’e-3 lander from Above And Below (orbit and surface). The Chang’e-3 timelapse lander color panorama (bottom) and orbital view (top) from NASA’s LRO orbiter shows Yutu rover after it drove down the ramp to the moon’s surface and began driving around the landers right side, passing by craters and heading south on Lunar Day 1. It then moved northwest during Lunar Day 2. Arrows show Yutu’s positions over time.
Credit: CNSA/NASA/Ken Kremer/Marco Di Lorenzo/Mark Robinson
See below more mosaics and LRO imagery
Story updated[/caption]
The powerful telescopic camera aboard NASA’s Lunar Reconnaissance Orbiter (LRO) has captured spectacular new images detailing the traverse of China’s Yutu moon rover around the landing site during its first two months exploring the Moon’s pockmarked grey terrain.
The newly released high resolution LRO images even show Yutu’s tracks cutting into the lunar surface as the world famous Chinese robot drove in a clockwise direction around the Chang’e-3 lander that delivered it to the ground in mid-December 2013.
You can precisely follow Yutu’s movements over time – from ‘above and below’ – in our new composite view (shown above) combining the latest LRO image with our timelapse mosaic showing the rover’s history making path from the touchdown point last December to today’s location.
Yutu is China’s first ever Moon rover and successfully accomplished a soft landing on the Moon on Dec. 14, 2013, piggybacked atop the Chang’e-3 mothership lander.
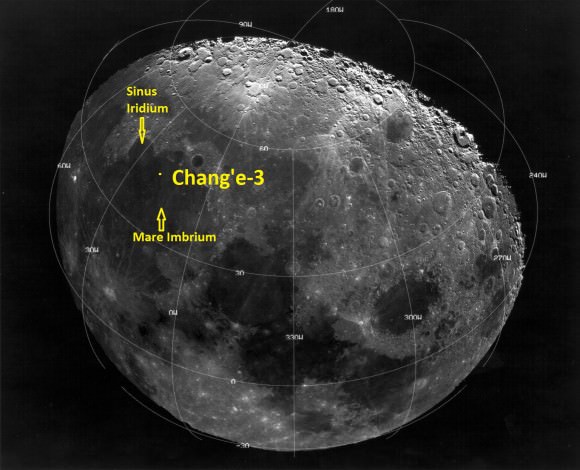
Barely seven hours after touchdown, the six wheeled moon buggy drove down a pair of ramps onto the desolate gray plains of the lunar surface at Mare Imbrium (Sea of Rains) covered by volcanic material.
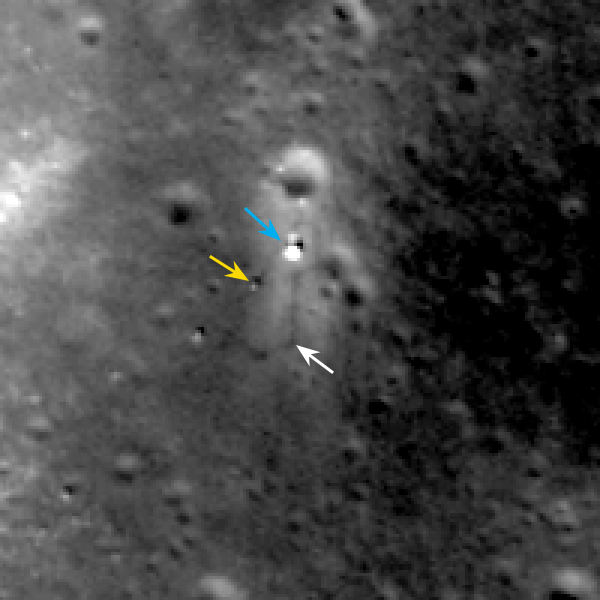
LROC February 2014 image of Chang’e 3 site. Blue arrow indicates Chang’e 3 lander; yellow arrow points to Yutu (rover); and white arrow marks the December location of Yutu. Yutu’s tracks can be followed clockwise around the lander to its current location. Image width 200 meters (about 656 feet). Credit: NASA/Goddard/Arizona State University
Altogether three images of the rover and lander have been taken to date by the Lunar Reconnaissance Orbiter Camera (LROC) aboard LRO – specifically the hi res narrow angle camera (NAC).
The LROC NAC images were captured on Dec. 25, 2013, Jan. 21, 2014 and Feb. 17, 2014 as LRO soared overhead.
The four image LRO composite below includes a pre-landing image taken on June 30, 2013.
Four LROC NAC views of the Chang’e 3 landing site. A) before landing, June 30, 2013 B) after landing, Dec. 25, 2013 C) Jan. 21, 2014 D) Feb. 17, 2014 Width of each image is 200 meters (about 656 feet). Follow Yutu’s path clockwise around the lander in “D.” Credit: NASA/Goddard/Arizona State University
Since the solar incidence angles were different, the local topography and reflectance changes between images showing different levels of details.
“In the case of the Chang’e 3 site, with the sun higher in the sky one can now see the rover Yutu’s tracks (in the February image),” wrote Mark Robinson, Principal Investigator for the LROC camera in an LRO update.
The solar powered rover and lander can only operate during periods of lunar daylight, which last 14 days each.
During each lunar night, they both must power down and enter hibernate mode since there is no sunlight available to generate power and no communications are possible with Earth.
Here is a gif animation from the NASA LRO team combining all four LROC images.
Four views of the Chang’e 3 landing site from before the landing until Feb. 2014. Credit: NASA/GSFC/Arizona State University
During Lunar Day 1, Yutu drove down the landers ramps and moved around the right side in a clockwise direction.
By the end of the first lunar day, Yutu had driven to a position about 30 meters (100 feet) south of the Chang’e-3 lander, based on the imagery.
See our complete 360 degree timelapse color panorama from Lunar Day 1 herein and at NASA APOD on Feb. 3, 2014 – assembled by Marco Di Lorenzo and Ken Kremer.
360-degree time-lapse color panorama from China’s Chang’e-3 lander. This new 360-degree time-lapse color panorama from China’s Chang’e-3 lander shows the Yutu rover at five different positions, including passing by crater and heading south and away from the Chang’e-3 lunar landing site forever during its trek over the Moon’s surface at its landing site from Dec. 15-22, 2013 during the 1st Lunar Day. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
After awakening for Lunar Day 2, Yutu then moved northwest and parked about 17 meters (56 feet) southwest of the lander, according to Robinson.
By comparing the Janaury and February images “it is apparent that Yutu did not move appreciably from the January location,” said Robinson.
At this moment Yutu and the companion Chang’e-3 lander are sleeping through their 3rd Lunar Night.
They entered hibernation mode on Feb. 22 and Feb. 23, 2014 respectively.
Hopefully both probes will awaken from their slumber sometime in the next week when the Moon again basks in daylight glow to begin a 4th day of lunar surface science operations.
“We all wish it would be able to wake up again,” said Ye Peijian, chief scientist of the Chang’e-3 program, according to CCTV, China’s state run broadcaster.
However, the hugely popular ‘Yutu’ rover is still suffering from an inability to maneuver its life giving solar panels. It is also unable to move – as I reported here.
The 140 kg rover is now nearing its planned 3 month long life expectancy on a moon roving expedition to investigate the moon’s surface composition and natural resources.
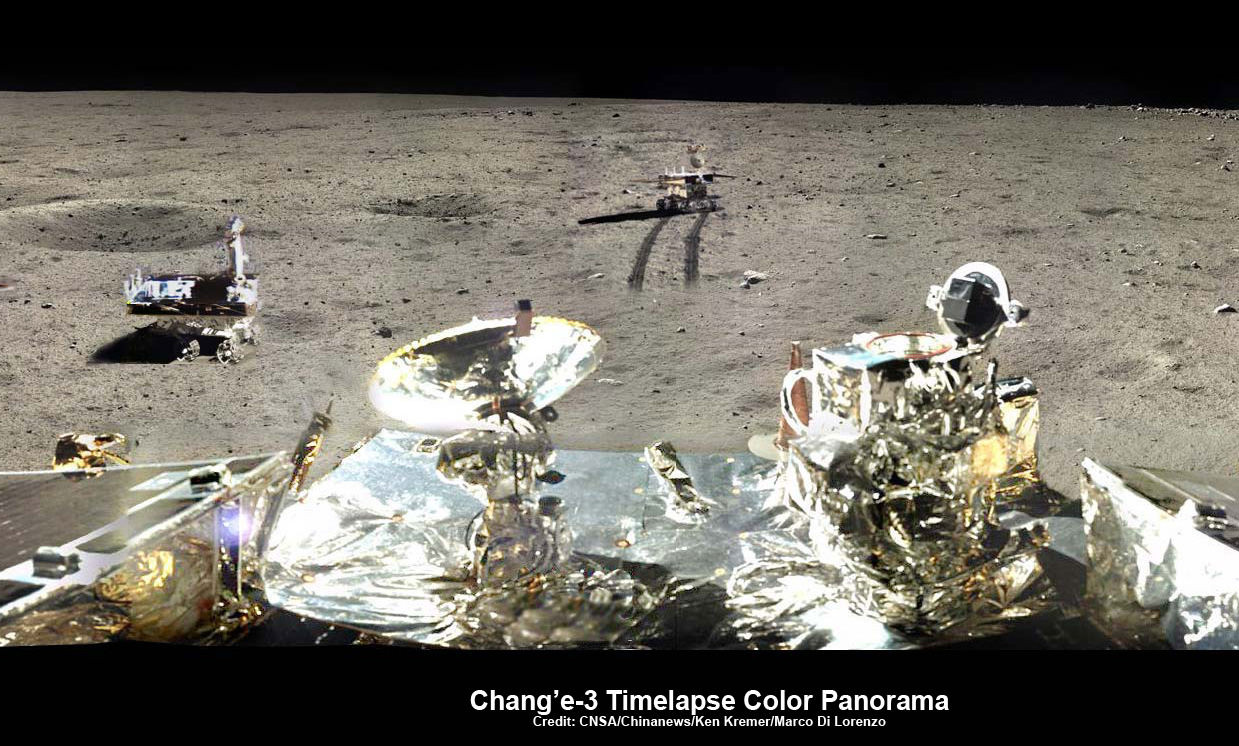
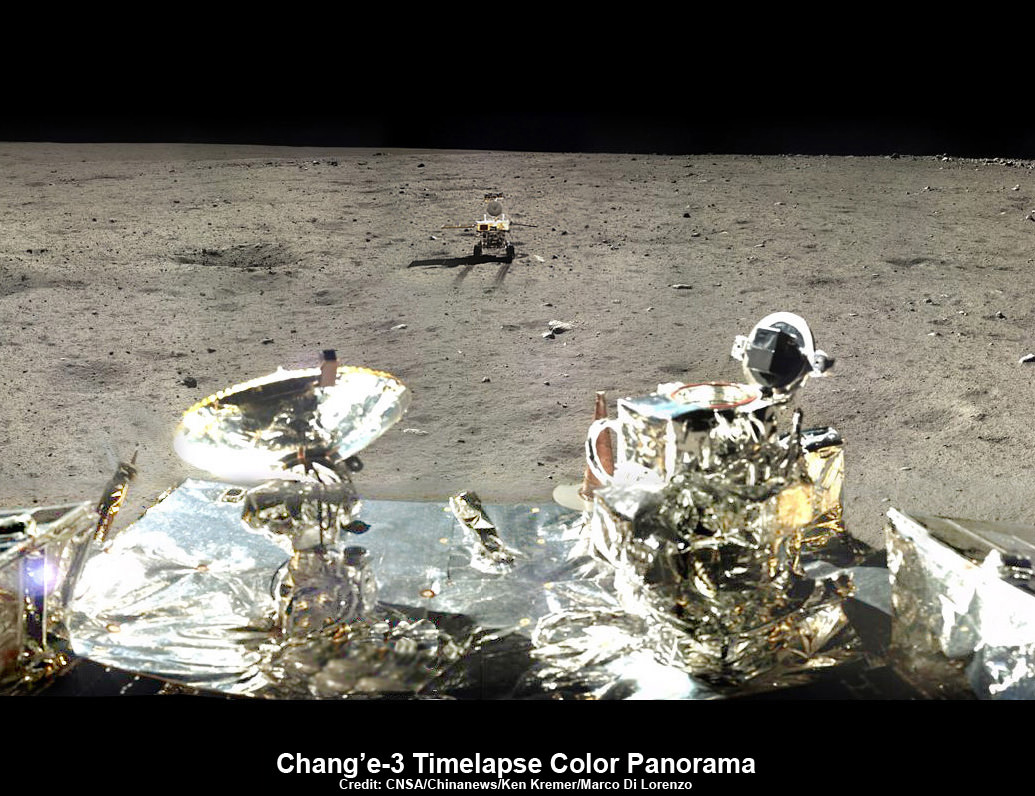
Chang’e-3/Yutu Timelapse Color Panorama
This newly expanded timelapse composite view shows China’s Yutu moon rover at two positions passing by crater and heading south and away from the Chang’e-3 lunar landing site forever about a week after the Dec. 14, 2013 touchdown at Mare Imbrium. This cropped view was taken from the 360-degree timelapse panorama. See complete 360 degree landing site timelapse panorama herein and APOD Feb. 3, 2014. Chang’e-3 landers extreme ultraviolet (EUV) camera is at right, antenna at left. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our complete Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
China is only the 3rd country in the world to successfully soft land a spacecraft on Earth’s nearest neighbor after the United States and the Soviet Union.
Stay tuned here for Ken’s continuing Chang’e-3, Orion, Orbital Sciences, SpaceX, commercial space, LADEE, Mars and more planetary and human spaceflight news. Learn more at Ken’s upcoming presentations at the NEAF astro/space convention on April 12/13.
Chang’e-3 lander and Yutu rover – from Above And Below Composite view shows China’s Chang’e-3 lander and Yutu rover from Above And Below (orbit and surface) – lander color panorama (top) and orbital view from NASA’s LRO orbiter (bottom). Chang’e-3 lander color panorama shows Yutu rover after it drove down the ramp to the moon’s surface and began driving around the landers right side to the south. Yellow lines connect craters seen in the lander panorama and the LROC image from LRO (taken at a later date after the rover had moved), red lines indicate approximate field of view of the lander panorama. Credit: CNSA/NASA/Ken Kremer/Marco Di Lorenzo/Mark Robinson
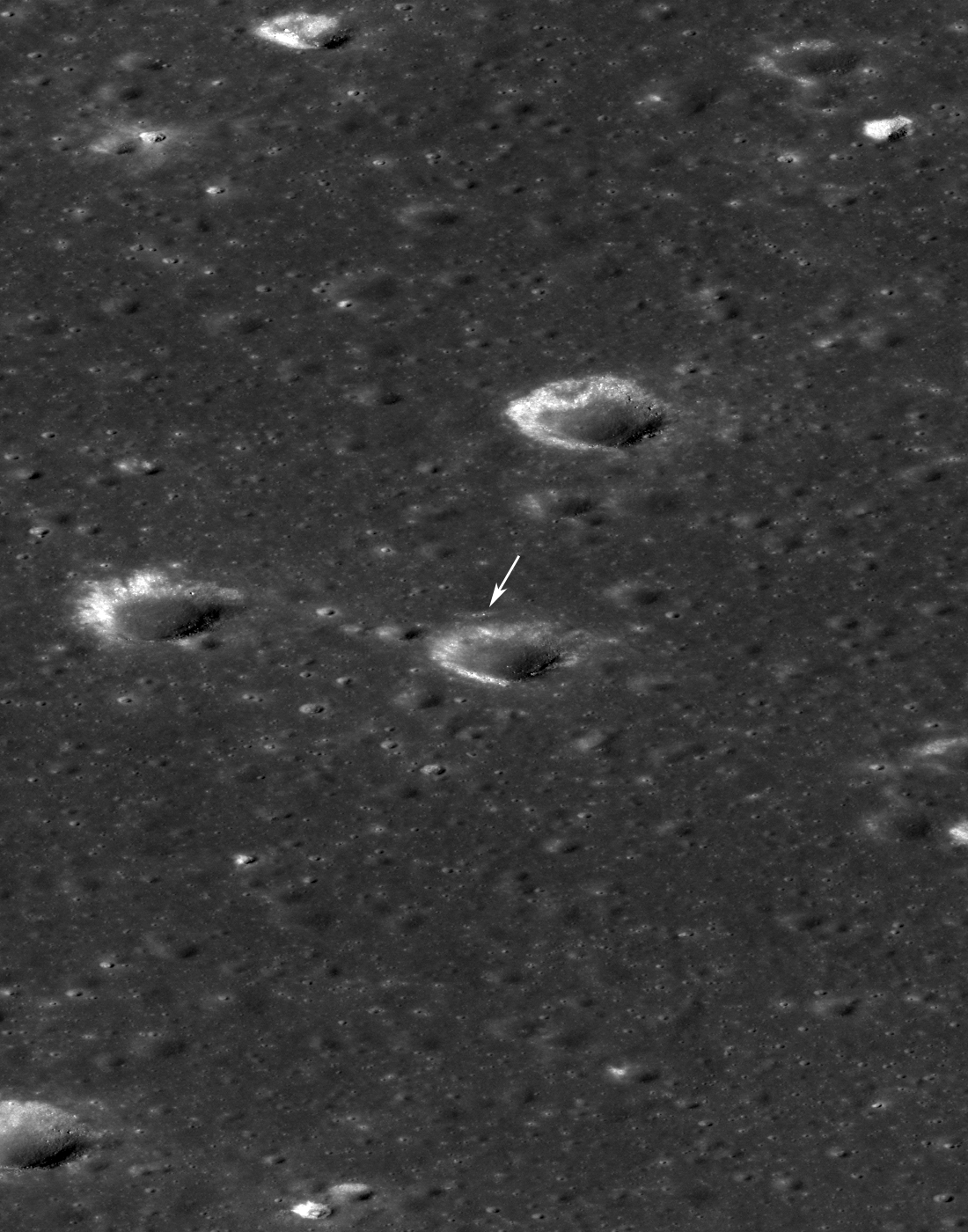
LRO slewed 54 degrees to the east on Feb. 16, 2014, to allow the LROC instrument to snap a dramatic oblique view of the Chang’e 3 site (arrow). Crater in front of lander is 450 meters (about 1,476 feet) in diameter. Image width is 2,900 meters (about 9,500 feet) at the center. Credit: NASA/Goddard/Arizona State University
This composite view shows China’s Yutu rover heading south and away forever from the Chang’e-3 landing site about a week after the Dec. 14, 2013 touchdown at Mare Imbrium. This cropped view was taken from the 360-degree panorama. See complete 360 degree landing site panorama herein. Chang’e-3 landers extreme ultraviolet (EUV) camera is at right, antenna at left. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our complete Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
The little ‘rabbit’ beloved worldwide has now phoned home and actually survived the perils of the long lunar night and is alive and awake to start a 3rd day of scientific exploration despite suffering a serious malfunction as it entered the latest hibernation period two weeks ago.
“Yutu has come back to life!” said Pei Zhaoyu, the spokesperson for China’s lunar probe program, according to a breaking news report by the state owned Xinhua news agency.
“Experts are still working to verify the causes of its mechanical control abnormality.”
The Chang’e-3 mothership lander and piggybacked Yutu surface rover soft landed on the Moon on Dec. 14, 2013 at Mare Imbrium (Sea of Rains) – marking China’s first successful spacecraft landings on an extraterrestrial body in history.
Yutu’s new lease on life also comes after Monday’s (Feb. 11) premature report of the robots demise by the state owned China News Service, reported here.
However, “Yutu failed to power-up Monday [Feb 11] and data about its current condition and repair progress is still being collected and analyzed,” Xinhua and CCTV (China state run television) reported.
This indicates that Yutu was in fact feared lost for some time by the mission team, until further efforts finally resulted in the detection of a signal from the spacecraft – and a welcome reversal of yesterdays news!
The robot “has now been restored to its normal signal reception function,” says Pei.
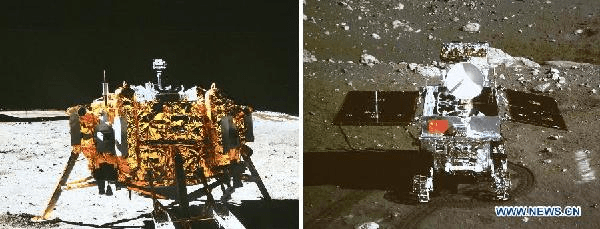
Side by side screenshot photos of the Chang’e-3 moon lander (L) and the Yutu moon rover during the mutual-photograph process, at the Beijing Aerospace Control Center in Beijing, on Dec. 15, 2013. The moon rover and the moon lander took photos of each other marking the complete success of the Chang’e-3 lunar probe mission. (Xinhua/Ding Lin)
Earlier today (Feb. 12) amateur radio operators at UHF-satcom reported detection of a signal from Yutu.
But much technical work remains ahead for the engineering and science teams to ascertain why it malfunctioned and whether the six wheeled rover can be restored to partial or full functionality.
As night fell on Jan. 25, the rover entered its second two week long period of dormancy just as the rover “experienced a mechanical control abnormality,” according to a report by China’s official government newspaper, The People’s Daily.
“Experts were initially concerned that it might not be able to survive the extremely low temperatures during the lunar night.”
360-degree time-lapse color panorama from China’s Chang’e-3 lander
This 360-degree time-lapse color panorama from China’s Chang’e-3 lander shows the Yutu rover at three different positions during its trek over the Moon’s surface at its landing site from Dec. 15-22, 2013 during the 1st Lunar Day. Credit: CNSA/Chinanews/Ken Kremer/Marco Di Lorenzo – kenkremer.com. See our Yutu timelapse pano at NASA APOD Feb. 3, 2014: http://apod.nasa.gov/apod/ap140203.htm
Each lunar day and night lasts for alternating periods of 14 Earth days.
During each long night, the Moon’s temperatures plunge dramatically to below minus 180 Celsius, or minus 292 degrees Fahrenheit.
Both solar powered probes must enter hibernation mode during each lunar night to conserve energy and protect their science instruments and control mechanisms, computers and electronics.
“The rover stands a chance of being saved now that it is still alive,” Pei stated.
Yutu, which translates as ‘Jade Rabbit’ is named after the rabbit in Chinese mythology that lives on the Moon as a pet of the Moon goddess Chang’e.
‘Jade Rabbit’ had departed the landing site forever, and was journeying southwards as the anomoly occurred – about six weeks into its planned 3 month long moon roving expedition to investigate the moon’s surface composition and natural resources.
The 140 kg Yutu robot is located some 100 m south of the lander.
Traverse Path of Yutu rover from Dec. 14 landing to Dec. 21. Landscape textured with Chang’e 3 imagery from space and ground. Credit: CNSA/BACC
Definitive word about the Chang’e-3 lander has not yet been announced. But it is expected to survive since no malfunctions have been reported. It has a 1 year design lifetime.
Xinhua stated that Chinese space officials will comment on the landers status soon.
The 1200 kg stationary lander is expected to return science data about the Moon and conduct telescopic observations of the Earth and celestial objects for at least one year.
Chang’e-3 and Yutu landed on a thick deposit of volcanic material.
The inaugural pair of probes could be the forerunners to a manned Chinese Moon landing mission a decade from now.
China’s current plans call for the Chang’e-4 Moon lander/rover to launch in 2016, perhaps with some upgrades and lessons learned from the ongoing mission.
China is only the 3rd country in the world to successfully soft land a spacecraft on Earth’s nearest neighbor after the United States and the Soviet Union.
Stay tuned here for Ken’s continuing Chang’e-3, Orion, Orbital Sciences, SpaceX, commercial space, LADEE, Mars and more planetary and human spaceflight news.
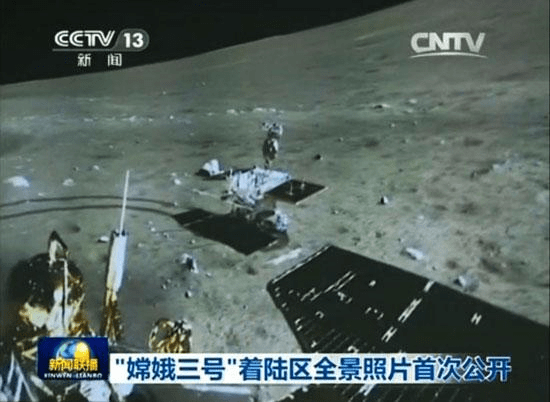
Portion of 1st panorama around Chang’e-3 landing site showing China’s Yutu rover leaving tracks in the lunar soil as it drives across the Moon’s surface on Dec. 15, 2013. Images taken by Chang’e-3 lander following Dec. 14 touchdown. Panoramic view was created from screen shots of a news video assembled into a mosaic. Credit: CNSA/CCTV/screenshot mosaics & processing by Marco Di Lorenzo/Ken Kremer
1st Chang’e-3 Lunar Panorama
Portion of 1st panorama around Chang’e-3 landing site showing China’s Yutu rover leaving tracks in the lunar soil as it drives across the Moon’s surface on Dec. 15, 2013. Images taken by Chang’e-3 lander following Dec. 14 touchdown. Panoramic view was created from screen shots of a news video assembled into a mosaic.
Credit: CNSA/CCTV/screenshot mosaics & processing by Marco Di Lorenzo/Ken Kremer
See below robotic arm screenshots – – Story updated [/caption]
As night fell on the Earth’s Moon, China’s Yutu rover and mothership lander have both entered a state of hibernation determined to survive the frigidly harsh lunar night upon the magnificently desolate gray plains.
Yutu went to sleep at 5:23 a.m. Dec. 26, Beijing time, upon a command sent by mission control at the Beijing Aerospace Control Center (BACC), according to China’s State Administration of Science, Technology and Industry for National Defence (SASTIND).
The Chang’e-3 lander began its long nap hours earlier at 11:00 a.m. Beijing time on Christmas Day, Dec. 25.
The vehicles must now endure the lunar night, which spans 14 Earth days in length, as well as the utterly low temperatures which plunge to below minus 180 degrees Celsius.
Yutu rover points mast with cameras and high gain antenna downwards to inspect lunar soil around landing site in this photo taken by Chang’e-3 lander. Credit: CNSA
Scientists completed a series of engineering tests on the probes to ensure they were ready to withstand the steep temperature drop, said Wu Fenglei of the Beijing Aerospace Control Center, to the Xinhua state news agency.
Since there is no sunlight, the solar panels can’t provide any power and have been folded back.
So they face a massive engineering challenge to endure the extremely cold lunar night.
Therefore in order to survive the frigid lunar environment, a radioisotopic heat source is onboard to provide heat to safeguard the rovers and landers delicate computer and electronics subsystems via the thermal control system.
They are situated inside a warmed box below the deck that must be maintained at a minimum temperature of about minus 40 degrees Celsius to prevent debilitating damage. Yutu prepares to flex robotic arm in this screen shot from a CCTV video animation. Credit: CNSA/CCTV/screenshot by R. Mackelenbergh/K. Kremer/M. Di Lorenzo
So the two spacecraft still have to prove they can hibernate and eventually emerge intact from the unforgiving lunar night.
Just prior to going to sleep, the 140 kg Yutu rover flexed its robotic arm and Chinese space engineers at BACC completed an initial assessment testing its joints and control mechanisms.
The short robotic arm appears similar in form and function to the one on NASA’s famous Spirit and OpportunityMars rovers.
It is equipped with an alpha particle X-ray instrument (APXS) – on the terminus – to determine the composition of lunar rocks and soil.
Yutu flexes robotic arm with APXS spectrometer towards rock in this screen shot from a CCTV video animation. Credit: CNSA/CCTV/screenshot by R. Mackelenbergh/K. Kremer/M. Di Lorenzo
The robotic pair of spacecraft safely soft landed on the Moon on Dec. 14 at Mare Imbrium, nearby the Bay of Rainbows, or Sinus Iridum region. It is located in the upper left portion of the moon as seen from Earth. You can easily see the landing site with your own eyes.
Barely seven hours after the history making touchdown, ‘Yutu’ was painstakingly lowered from its perch atop the lander and then successfully drove all six wheels onto the moon’s surface on Dec. 15.
Yutu left noticeable tracks behind, several centimeters deep, as the wheels cut into the loose lunar regolith.
The Chang’e-3 lander and rover then conducted an initial survey of the stark lunar landing site, pockmarked with craters and small boulders.
They took an initial pair of portraits of one another. Read my earlier report – here.
The four legged lunar lander also snapped the missions first panoramic view of the touchdown spot at Mare Imbrium using three panoramic cameras (Pancams) pointing in different directions. Read my earlier report – here.
See the eerie panoramic view of the landing site showing Yutu’s first moments on the alien lunar surface in our screenshot mosaic above – and here.
See the dramatic video with an astronauts eye view of the lunar descent and touchdown in my prior story – here.
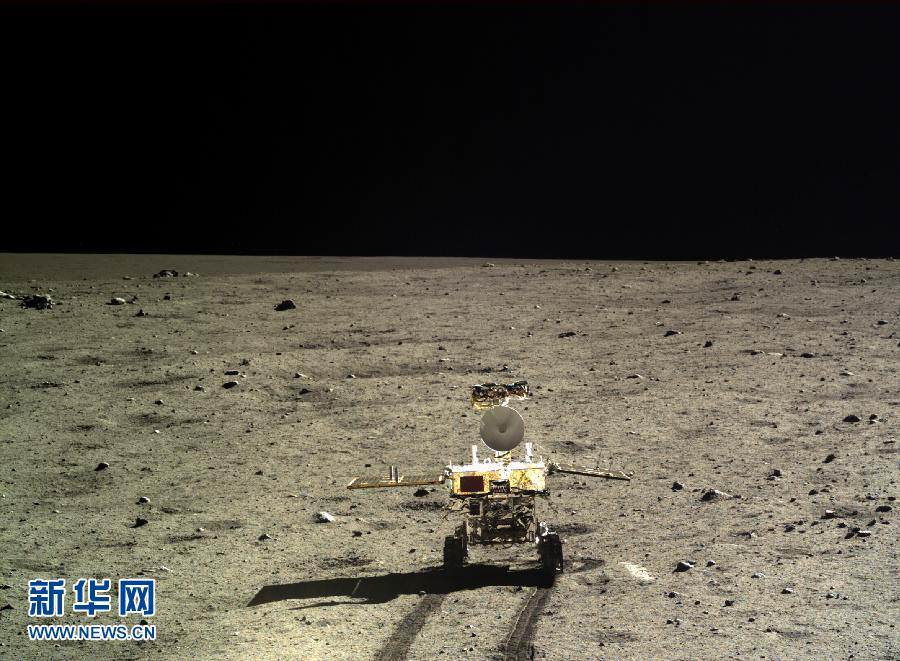
Yutu, which translates as ‘Jade Rabbit’, was then directed to travel in a semicircular path around the right side of the lander and is heading to the south.
Its currently napping about 40 meters to the south.
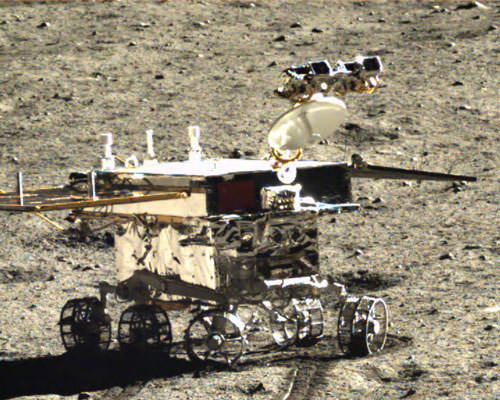
China’s 1st Moon rover ‘Yutu’ embarks on thrilling adventure marking humanity’s first lunar surface visit in nearly four decades. Yutu portrait taken by the Chang’e-3 lander. Credit: CNSA/CCTV
‘Jade Rabbit’ will resume the lunar trek upon awakening, along with the stationary lander, from their extended two week slumber around Jan 12, 2014.
Yutu will depart the Chang’e-3 landing zone forever and rove the moon’s surface for investigations expected to last at least 3 months – and perhaps longer depending on its robustness in the unforgiving space environment.
The robotic rover will use its suite of four science instruments to survey the moon’s geological structure and composition to locate the moon’s natural resources for use by potential future Chinese astronauts, perhaps a decade from now.
NASA’s Lunar Reconnaissance Orbiter (LRO) imaged the Chang’e-3 landing site in western Mare Imbrium around Christmas time on 24 and 25 December with its high resolution LROC camera and we’ll feature them here when available.
China is only the 3rd country in the world to successfully soft land a spacecraft on Earth’s nearest neighbor after the United States and the Soviet Union.
The best is surely yet to come!
Stay tuned here for Ken’s continuing Chang’e-3, LADEE, MAVEN, MOM, Mars rover and more news.
China’s 1st Moon rover ‘Yutu’ embarks on thrilling adventure marking humanity’s first lunar surface visit in nearly four decades. Yutu portrait taken by the Chang’e-3 lander. Credit: CNSA/CCTV
China’s 1st Moon rover ‘Yutu’ embarks on thrilling adventure marking humanity’s first lunar surface visit in nearly four decades. Yutu portrait taken by the Chang’e-3 lander. Credit: CNSA/CCTV
See below Yutu’s departing portrait of Chang’e-3 lander emblazoned with Chinese national flag Story updated[/caption]
China’s now famous ‘Yutu’ moon rover has set sail for what promises to be breathtaking new adventures on Earth’s nearest neighbor, after completing a final joint portrait session with the Chang’e-3 lander that safely deposited her on the lunar surface only a week ago.
Yutu’s upcoming journey marks humanity’s first lunar surface visit in nearly four decades since the Soviet Union’s Luna 24 sample return vehicle visited. America’s last lunar landing mission with the Apollo 17 astronauts departed 41 years ago on Dec. 14, 1972.
The Chang’e-3 mothership and Yutu rover have resumed full operations after awakening from a sort of self induced slumber following commands from Mission Control back in Beijing.
The lander and rover finished up their 5th and final dual picture taking session – in living lunar color – on Sunday, Dec. 22, according to CCTV, China’s state run broadcast network.
“Ten pictures have been taken at five spots so far, and all of them are better than we expected,” said Wu Weiren, chief designer of the China Lunar Probe Program, to CCTV.
See the newly released portraits from photo session 5 – above and below.
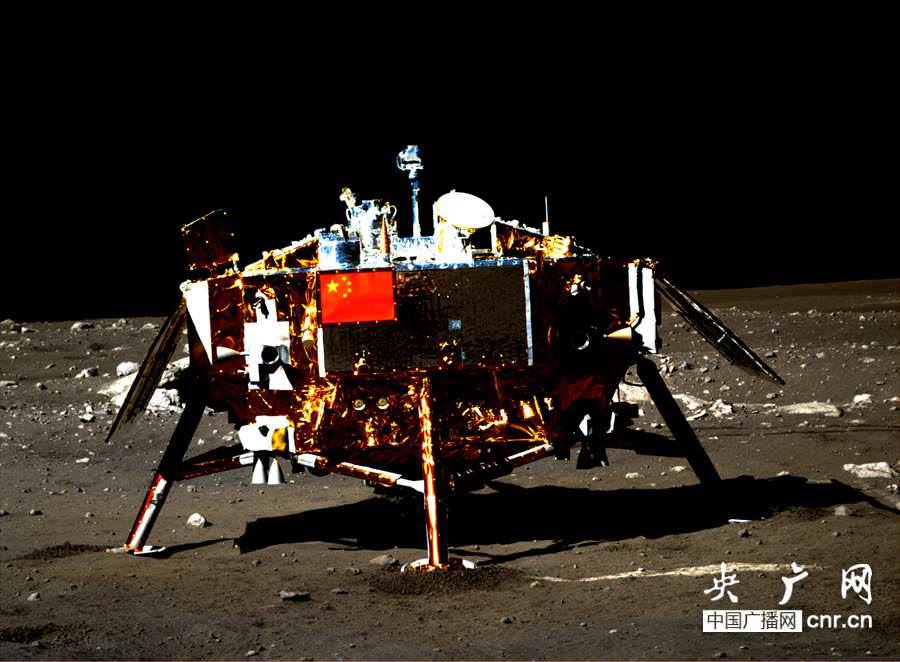
The rover and lander have taken photos of each other for the fifth and final time. The back side of Chang’e 3 lander as seen by rover Yutu with Chinese national flag at left imaged for the first time. Credit: CNSA/CCTV
After arriving on the moon, Yutu and the lander took an initial pair of portraits of one another. Read my earlier report – here.
Yutu was then directed to travel in a semicircular path around the lander and to the south, making tracks several centimeters deep into the loose lunar regolith.
But within two days of the historic Dec. 14 touchdown, the two spacecraft took a four-day break that lasted from Dec. 16 to Dec. 20, during which China’s space engineers shut down their subsystems, according to China’s State Administration of Science, Technology and Industry for National Defense (SASTIND).
Portion of 1st panorama around Chang’e-3 landing site after China’s Yutu rover drove onto the Moon’s surface on Dec. 15, 2013. The images were taken by Chang’e-3 lander following Dec. 14 touchdown. Panoramic view was created from screen shots of a news video assembled into a mosaic. Credit: CNSA/CCTV/screenshot mosaics & processing by Marco Di Lorenzo/Ken Kremer See the complete panorama below
The vehicles took a ‘nap” to deal with direct solar radiation that significantly raised their temperatures. Yutu’s sunny side exceeded 100 degrees centigrade while the shaded side was simultaneously below zero, reported SASTIND.
“The break had been planned to last until Dec. 23, but the scientists decided to restart Yutu now for more research time, based on the recent observations and telemetry parameters,” said Pei Zhaoyu, spokesman for the Chinese lunar program, according to China’s Xinhua state news agency.
Both robots then snapped additional photos of one another during the traverse from each of five specific and preplanned locations.
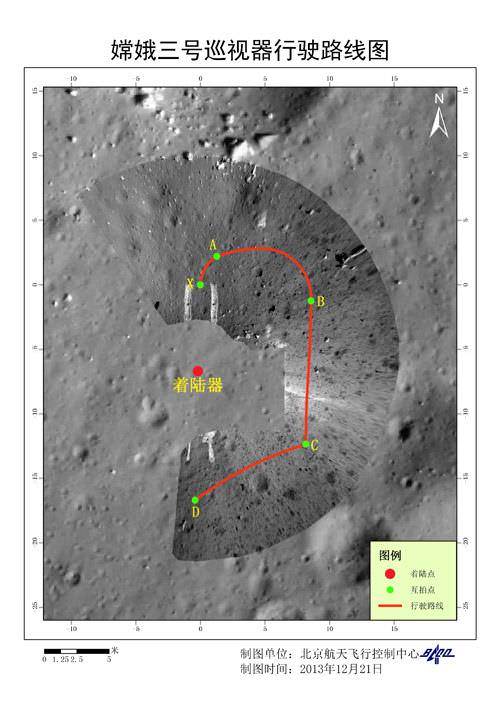
See accompanying traverse map below – written in Chinese.
Path of Yutu rover from Dec. 14 landing to Dec. 21. Landscape textured with Chang’e 3 imagery from space and ground. Credit: CNSA/BACC
These images taken by Yutu were designed to show the 1200 kg Chang’e-3 lander from the front, side and back sides as it drove around the right side – for better illumination – at a distance of about 10 meters.
The final image of the Chang’e-3 lander taken by Yutu also captured China’s national flag emblazoned on the lander for the first time, since this was the first time it was in view of the rover’s camera eyes.
See the accompanying traverse graphic here – written in Chinese.
Yutu and the Chang’e 3 lander were scheduled to take photos of each other from locations outlined in this artists concept. Credit: China Space
Having fulfilled the last of their joint tasks, the two spacecraft can therefore each begin their own lunar exploration missions, working independently of one another exactly as planned from the outset of China’s inaugural moon landing feat.
Yutu will depart the Chang’e-3 landing zone forever and begin its own lunar trek that’s expected to last at least 3 months – and perhaps longer if it’s delicate electronic components survive the moon’s utterly harsh and unforgiving space environment.
“They will begin to conduct scientific explorations of the geography and geomorphology of the landing spot and nearby areas, and materials like minerals and elements there. We will also explore areas 30 meters and 100 meters beneath the lunar soil. The exploration will continue longer than we planned, because all the instruments and equipments are working very well,” noted Wu Weiren.
The robotic pair of spacecraft safely soft landed on the Moon on Dec. 14 at Mare Imbrium, nearby the Bay of Rainbows, or Sinus Iridum region.
Barely seven hours after the history making touchdown, ‘Yutu’ was painstakingly lowered from its perch atop the lander and then successfully drove all six wheels onto the moon’s surface on Dec. 15.
The Chang’e-3 mothership captured a panoramic view of the stark lunar terrain surrounding the spacecraft after ‘Yutu’ drove some 9 meters away from the lander.
See the eerie panoramic view of the landing site showing Yutu’s first moments on the alien lunar surface in my prior story – here.
See the dramatic video with an astronauts eye view of the lunar descent and touchdown in my prior story – here.
1st panorama around Chang’e-3 landing site after China’s Yutu rover drove onto the Moon’s surface on Dec. 15, 2013. The images were taken by Chang’e-3 lander following Dec. 14 touchdown. Panoramic view was created from screen shots of a news video assembled into a mosaic. Credit: CNSA/CCTV/screenshot mosaics & processing by Marco Di Lorenzo/Ken Kremer
The 120 kg Yutu rover is almost the size of a golf cart. It measures about 1.5 m x 1 m on its sides and stands about 1.5 m (nearly 5 feet) tall – virtually human height.
Yutu, which translates as ‘Jade Rabbit’ will use its suite of four science instruments to survey the moon’s geological structure and composition to locate the moon’s natural resources for use by potential future Chinese astronauts, perhaps a decade from now.
Stay tuned here for Ken’s continuing Chang’e-3, LADEE, MAVEN, MOM, Mars rover and more news.
Ken Kremer Landing site of Chinese lunar probe Chang’e-3 on Dec. 14, 2013. [/caption]
Portion of 1st panorama around Chang’e-3 landing site after China’s Yutu rover drove onto the Moon’s surface on Dec. 15, 2013. The images were taken by Chang’e-3 lander following Dec. 14 touchdown. Panoramic view was created from screen shots of a news video assembled into a mosaic. Credit: CNSA/CCTV/screenshot mosaics & processing by Marco Di Lorenzo/Ken Kremer See the complete panorama below Story updated
Portion of 1st panorama around Chang’e-3 landing site after China’s Yutu rover drove onto the Moon’s surface on Dec. 15, 2013. The images were taken by Chang’e-3 lander following Dec. 14 touchdown. Panoramic view was created from screen shots of a news video assembled into a mosaic. Credit: CNSA/CCTV/screenshot mosaics & processing by Marco Di Lorenzo/Ken Kremer
See the complete panorama below Story updated[/caption]
China’s inaugural Chang’e-3 lunar lander has snapped the missions first panoramic view of the touchdown spot at Mare Imbrium.
To make it easier to see and sense ‘the new view from the Moon’, we have created screen shots from the rather low resolution TV broadcast and assembled them into a photo mosaic of the landing site – see above and below mosaics by Marco Di Lorenzo and Ken Kremer.
The Chang’e-3 mothership imaged the stark lunar terrain surrounding the spacecraft after the ‘Yutu’ rover perched atop successfully drove all six wheels onto the moon’s surface on Dec. 15, barely 7 hours after the momentous landing on Dec. 14.
The individual images were taken by three cameras positioned around the robotic lander.
1st panorama around Chang’e-3 landing site after China’s Yutu rover drove onto the Moon’s surface on Dec. 15, 2013. The images were taken by Chang’e-3 lander following Dec. 14 touchdown. Panoramic view was created from screen shots of a news video assembled into a mosaic. Credit: CNSA/CCTV/screenshot mosaics & processing by Marco Di Lorenzo/Ken Kremer
Chinese scientists then pieced them together to form the lander’s first panoramic view of the lunar surface, according to CCTV.
“This picture is made of 60 pictures taken 3 times by the rover. The rover used three angles: vertical, 15 degrees tilted up, and 15 degrees down…so that we get an even farther view,” said Liu Enhai, Designer in Chief, Chang’E-3 Probe System, in a CCTV interview
The panoramic view shows ‘Yutu’ and its wheel tracks cutting a semi circular path at least several centimeters deep into the loose lunar regolith at the landing site at Mare Imbrium, located near the Bay of Rainbows.
After making its soft landing, the Chang’e-3’s lander took pictures around its landing spot. Credit: CCTV
A significant sized crater, several meters wide, is seen off to the left of Yutu and located only about 10 meters away from the Chang’e-3 lander.
Several more craters are visible in the pockmarked surface around the lander.
Mission leaders purposely equipped the lander with terrain recognition radar and software so that it could steer clear of hazards like craters and large boulders and find a safe spot to land.
Wheel tracks from Yutu moon rover. Credit: CNSA/CCTV
Indeed just prior to touchdown, the lander actually hovered at an altitude of 100 meters for about 20 seconds to avoid the craters and rock fields which could have doomed the mission in its final moments.
See the dramatic Chang’e-3 landing video in my earlier report – here.
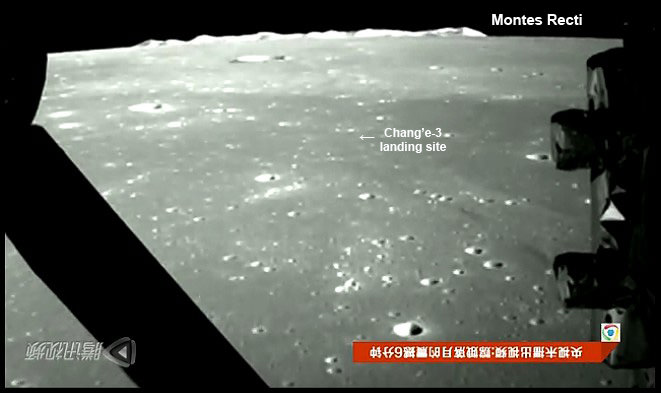
Here is our annotated screen shot from the landing video showing the eventual landing site in the distance:
This screen shot from one photo of many of the moons surface snapped by the on-board descent imaging camera of the Chinese lunar probe Chang’e-3 on Dec. 14, 2013 shows the probe approaching the Montes Recti mountain ridge and approximate location of the landing site. This marks the first time that China has sent a spacecraft to soft land on the surface of an extraterrestrial body. Credit: Xinhua/CCTV/post processing and annotations Marco Di Lorenzo /Ken Kremer.
“The rover reached the point of X after it went down from the lander, then it established contact with the ground. Then it went to point A, where the rover and lander took pictures of each other. Then it reached point B, where it’s standing now.” said Liu Jianjun, Deputy Chief Designer, Chang’E-3 Ground System, to CCTV.
China thus became only the 3rd country in the world to successfully soft land a spacecraft on Earth’s nearest neighbor after the United States and the Soviet Union.
Chinese President Xi Jinping and space agency leaders have hailed the Chang’e-3 mission as a complete success for China.
The Yutu rover, which translates as ‘Jade Rabbit’ will use its science instruments to survey the moon’s geological structure and composition on a minimum three month mission to locate the moon’s natural resources for use by potential future Chinese astronauts.
The lander will conduct in-situ exploration at the landing site for at least one year, say Chinese officials.
Hopefully, China will quickly start releasing full resolution imagery and video taken by the Chang’e-3 lander and Yutu rover at a dedicated mission website, like NASA does, rather than issuing photos of imagery from projection screens and televisions – so that we all can grasp the full beauty of their tremendous lunar feat.
Stay tuned here for Ken’s continuing Chang’e-3, LADEE, MAVEN, MOM, Mars rover and more news.
Ken Kremer Landing site of Chinese lunar probe Chang’e-3 on Dec. 14, 2013. [/caption]
Iran’s space program reportedly launched its second monkey into space on a 15-minute flight on Saturday (Dec. 14).
Reports from the Islamic Republic News Agency said the ballistic flight reached as high as 75 miles (120 kilometers). That’s just beyond the Karman line of 62 miles (100 kilometers) that many authorities cite as the boundary of space.
“The President said that thank God, Iranian astronauts launched into the space the second monkey, Fargam, on the first day of the Week of Research, the ‘Pajouhesh’ explorer and landed in full safety and health,” read a dispatch on IRNA, which is the official state agency in Iran.
The United States, Soviet Union and France sent primates themselves into space in the 1960s, many of which did not survive the trip. “Ham” is among the most famous monkey space voyagers; the U.S. chimp launched into space and landed safely on Jan. 31, 1961, a few months before astronaut Al Shepard became the first American person in space that May.